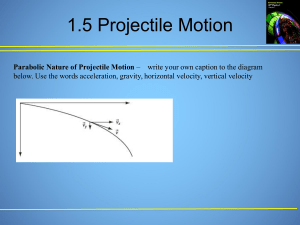
Motion in a plane – all derivations Parallelogram law of vector addition According to the parallelogram law of vector addition: If two vectors are considered to be the adjacent sides of a parallelogram, then the resultant of the two vectors is given by the vector that is diagonal passing through the point of contact of the two vectors. Consider two vectors A and B inclined at an angle θ as shown. Let their resultant be R . Extend PQ and draw QR such that SR QR . In QRS QR cos θ QR QS cosθ B cosθ QS SR sinθ SR QS sinθ B sinθ QS .........(i) ..........(ii) In PSR PS 2 PR SR 2 2 R2 PQ QR SR 2 2 R2 A B cosθ B sinθ 2 2 [using (i) and (ii)] R2 A 2 B2 sin2 θ 2ABcosθ B2 sin2 θ R2 A 2 B2 sin2 θ cos2 θ 2ABcosθ R2 A 2 B2 2ABcosθ R A 2 B2 2AB cosθ If R makes an angle α with A , then SR SR PR PQ QR B sinθ tan α A B cosθ tan α B sinθ α tan1 A B cosθ Horizontal projection of projectile Consider a projectile thrown with velocity u in horizontal direction from a height h as shown Therefore, ux u, uy 0 a x 0, a y g Equation of path x ux t 1 2 a x t x ut 2 y uy t 1 2 1 a y t y gt 2 2 2 t x u 2 1 x 1g 2 y g x 2 u 2u Which is a quadratic equation. Thus, path of a projectile is parabolic in nature. Time of flight Total time for which the projectile remains in air is called time of flight. 1 y uy t a y t 2 2 1 h 0 t gT 2 2 T 2h g Horizontal range (R) Maximum horizontal distance travelled by projectile. 1 2 axt 2 1 R uT 0 T 2 2 x ux t Ru 2h g h 0 t 1 gT 2 Velocity at any instant v x ux ax t vx u v y uy ay t v y gt As v v 2x v 2y v u2 g2 t 2 Angular projectile motion Consider a body projected with velocity u at an angle θ with horizontal as shown. Therefore, u x ucosθ, uy u sinθ ax 0 a y g Equation of path x ux t 1 2 a x t x ucos θt 2 y uy t 1 2 1 a y t y u sinθt gt 2 2 2 t x ucos θ x 1 x y u sinθ g ucos θ 2 ucosθ 2 1 g 2 y x tanθ 2 x 2 2 u cos θ Time of flight Total time for which the projectile remains in air is called time of flight. y uy t 1 2 ay t 2 0 u sinθ T T 2usinθ g 1 2 gT 2 y 0 when body hits the ground Maximum height attained At maximum height v y 0 0 uy a y t 0 usinθ gt usinθ t t Putting this value in equation of y, we get y uy t 1 2 ay t 2 u sinθ 1 u sinθ H u sinθ g g 2 g u2 sin2 θ 1 u2 sin2 θ H g 2 g u2 sin2 θ H 2g Horizontal range 1 x ux t a x t 2 2 2u sinθ 1 2 R ucosθ 0 t g 2 2u2 sinθ cos θ R g R u2 sin2θ g Velocity at any instant v x ux ax t ucosθ v y uy ay t usinθ gt v v 2x v 2y 2 v ucos θ 2 u sinθ gt 2 v u2 sin2 θ u2 cos2 θ g2 t 2 2u sinθgt v u2 sin2 θ cos2 θ g2 t 2 2u sinθgt v u2 g2 t 2 2usinθgt Centripetal acceleration Consider a body moving in a circle of radius r with velocity v. Let the position vector of body be r1 when it is at P and r2 when it is Q. The velocity vector of body at P is v1 and Q it is v 2 . If angle between r1 and r2 is θ then clearly angle between v1 and v 2 is also θ . Clearly | r1 | | r2 | r Since the motion is uniform so, | v1 | | v 2 | v Now in QOP and CAB OP OQ r AB AC v and QOP CAB by SAS similarity rule QOP CAB so, v v v v r r r t r t ac v2 r A small donation will help and motivate us to make more quality content for free for all the needy students in our country. Your small amount can make a big difference in someone’s life