NASA – Internship Final Report
Predicting Ullage Behavior in Orion Propellant Tanks
Kiowa A. Wells*
Physics Department, Delgado Community College, New Orleans, LA
An investigation into Orion propellant and ullage behavior in microgravity and under thrust
was carried out in the hopes of refining input parameters for the Heat Mass Transfer (HMT)
predictive utility. Relevant literature from the last 60 years was examined to assess the state
of the art regarding methods for predicting ullage geometry, location, and formation time
during weightlessness. For simple cylindrical and pill-shaped propellant tanks, a method for
easily calculating propellant-ullage-tank interface surface areas under thrust has been
established, as well as a model for estimating propellant and ullage geometry and position in
microgravity. It may be possible to approximate the formation time of the propellant-ullage
equilibrium interface in weightlessness using simple equations, but tanks with complex
internal architecture should undergo comprehensive analysis with computational fluid
dynamics (CFD) before such methods can be considered reliable. Regardless, formation time
is likely to be short enough to be considered negligible for the purposes of modeling thermal
transfer in HMT until such time as further research can be carried out.
Nomenclature
A
D
H
h
L
R
r
SA
t
V
v
x
ρ
σ
υ
θc
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
Subscripts
g
=
gw
=
hemi
=
p
=
*
area
diameter
overall tank height
propellant height
relevant dimension of a system (e.g., the radius of a sphere)
ESM propellant tank radius
propellant radius at h
surface area
time
volume
ratio of propellant volume to tank hemisphere volume
ratio of propellant height to tank radius
liquid density
surface tension
kinematic viscosity
contact angle
ullage gas
ullage-wall interface
hemispherical tank segment
propellant
HMT Intern, NASA Glenn Research Center, 21000 Brookpark Road, Cleveland, OH 44135
NASA Glenn Research Center
1
19 August, 2022
NASA – Internship Final Report
pg
pw
s
t
w
1,2, or 3
=
=
=
=
=
=
propellant-ullage interface
propellant-wall interface
sphere of radius R
propellant tank
propellant tank wall
tank zone #
I. Introduction
The Heat and Mass Transfer utility (HMT) is a versatile tool for modeling fluid thermodynamics of the European
Service Module (ESM) propulsion system.10 HMT tracks the mass and energy of propellant subsystem components,
accounting for many variables (ΔT, resource consumption, performance, etc.) and changing environmental conditions
experienced during a mission. Due to requirements of the Orion spacecraft to maintain and adjust propellant tank
pressures, ullage geometry and behavior are of specific interest to HMT. Because the ESM propellant tanks are heated,
accurately modeling the surface contact area of the interfaces between the tank wall, propellant, and ullage is necessary
for predicting the rate of ullage gas expansion, which is critical to maintaining nominal tank pressur es. The purpose
of this undertaking is to shore up HMT’s ability to make such predictions through an assessment of the current art and
an examination of future avenues of research.
II. Modeling Surface Areas in 1g and Under Thrust
The pill-shaped propellant tanks employed by the ESM essentially comprise a cylinder and a sphere. Because a
sphere has the same surface area as the wall of the smallest cylinder that can contain it, the overall SA of the tank is
equal to 2πRH, where R is the radius at the cylindrical part of the tank and H is its overall height. In gravity or under
acceleration, this same formula can be applied to the propellant-to-wall surface area Apw, with the caveat that when
the propellant level reaches the lower hemispherical segment, the maximum radius r is not constant but varies with
the in-tank propellant height h as given by
𝑟 = √2𝑅ℎ − ℎ2 .
(1)
Calculating Apw can nevertheless be achieved in a relatively
straightforward way with the piecewise treatment
2π𝑟ℎ 𝑖𝑓 𝑉𝑝 < 𝑉ℎ𝑒𝑚𝑖
A𝑝𝑤 = {
2π𝑅ℎ 𝑖𝑓 𝑉𝑝 ≥ 𝑉ℎ𝑒𝑚𝑖
(2)
where Vp is the propellant volume and Vhemi is the volume of a
hemispherical tank-end segment of radius R. Finding Apw also
gives us the gas-to-wall area Agw, while the propellant-to-gas
area Apg is simply the area of the circle where the propellant
and pressurant meet.†
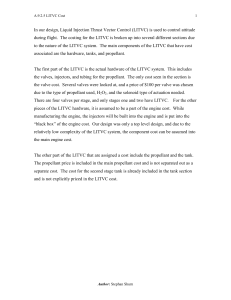
Since methods for finding the values of h and r change
depending on the fill level of the tank, it is useful to consider
the tank as comprising three discrete zones, where zone 1 is the
“bottom” hemisphere at the downstream end of the tank, zone
2 is the cylindrical center, and zone 3 is the “top” hemisphere
at the upstream end (fig. 1). While we don’t know the fill-level
of the propellant at any given time out of hand, we do know its
volume, which can be used to determine which zone it is in as
follows: If Vp < V1, h is in zone 1. If V1 ≤ Vp ≤ V1+2 , h is in
zone 2. If Vp > V1+2 , h is in zone 3.
†
Figure 1. Dividing the tank into 3 discrete zones
simplifies surface area calculations.
For our purposes, any tilt that might cause an elliptical interface between the propellant and pressurant is disregarded.
NASA Glenn Research Center
2
19 August, 2022
NASA – Internship Final Report
When h is somewhere in zone 1, the propellant volume
is equal to
1
𝑉𝑝 = 𝜋 (𝑅ℎ2 − ℎ3 ) .
(3)
3
Substituting the propellant-to-hemisphere volume ratio v
and the propellant-height-to-tank-radius ratio x gives
1
𝑣 ∙ 𝑉ℎ𝑒𝑚𝑖 = 𝜋 (𝑅(𝑥𝑅)2 − (𝑥𝑅)3 )
3
(4)
which becomes the nondimensional
1
𝑣 = (3𝑥 2 − 𝑥 3 ).
2
(5)
Because there is no elegant way to solve for x in the
thorny cubic relationship above, the best-fit piecewise
function
0.92100𝑣 0.53 𝑖𝑓 𝑣 < 0.25
0.96011𝑣 0.56 𝑖𝑓 0.25 ≤ 𝑣 < 0.50
𝑥(𝑣) =
(6)
0.98710𝑣 0.60 𝑖𝑓 0.50 ≤ 𝑣 < 0.75
𝑣 0.6451 𝑖𝑓 𝑣 ≥ 0.75
{
Figure 2. Piecewise fit to analytic solution of x at 10%
intervals.
was obtained from an analytic solution using manually entered x values (fig. 2). Multiplying x by the tank radius R
produces h, which in turn gives us r and Apw via Eqs. (1) and (2).
If h is somewhere in zone 2, subtracting V1 from Vp allows us to use the cylinder volume formula to solve for hp2.
Adding this to R produces h, which in turn can be plugged into Eq. (2) to find the surface areas.
Finally, if h is in zone 3, the same process used in zone 1 can be followed using the ullage volume Vg to determine
ullage height hg, which when subtracted from the overall height H produces h.
III. Ullage Geometry in Microgravity
There is a mountain of literature concerning the final geometry of the liquid-gas interface in low-g, nearly all of
which agrees that the ullage usually (not always!) forms a single bubble which “prefers” to adhere to a tank wall, and
whose position in the tank is dictated by the properties of the liquid and the interior tank architecture. 1,8,9 The interface
between the bubble(s) and the liquid is spherical at equilibrium, with sometimes considerable distortion in the area
where the liquid, tank wall, and ullage meet determined by the solid-liquid contact angle.1,5,6 In cylindrical tanks, when
the ullage volume’s spherical radius would be larger than that of the container, the bubble conforms to the tank wall
and forms a spherical interface with the propellant. In weightlessness, the bubble can migrate toward the tank center
and become sandwiched between two separate liquid masses of similar volume (fig. 3).‡ Computational fluid dynamics
(CFD) simulations along with recent experiments have confirmed this behavior in simple cylindrical and pill-shaped
tanks.3,4 For tanks with a complex internal architecture, the behavior and geometry of the ullage become more
complicated and difficult to predict without the aid of sophisticated modeling software. To this point, Surface Evolver
simulations performed by Airbus Defense and Space in 2019 show a variety of interesting possible bubble behaviors
in different ESM tank sections: For example, a bubble approaching radius R tends to develop an interior cylindrical
conformation surrounded radially by propellant whenever it migrates to a tank section lined with ring baffles in one
of the upper tanks.§ Simulations for the lower tank, where no baffles are present, strongly support predictions made
using the equations outlined below.2
‡
For contact angles near 0ᵒ these masses may be connected by a thin film of liquid adhering to the tank wall. For the purposes of
HMT this can be ignored, as such a film should not have a significant impact on thermal transfer.
§
The resultant possible bubble conformations represented in the simulations are not sufficiently different from our simple model to
be relevant for HMT.
NASA Glenn Research Center
3
19 August, 2022
NASA – Internship Final Report
For simple cylindrical and pill-shaped tanks, the surface areas of the
propellant, ullage, and tank interfaces during weightlessness can be loosely
calculated based on the ullage volume by
4𝜋𝑟 2 𝑖𝑓 𝑉𝑔 < 𝑉𝑠
4𝜋𝑅2 𝑖𝑓 𝑉𝑔 ≥ 𝑉𝑠
(7)
0 𝑖𝑓 𝑉𝑔 ≤ 𝑉𝑠
𝐴𝑔𝑤 = {2(𝑉𝑔−𝑉s)
𝑖𝑓 𝑉𝑡 > 𝑉𝑔 > 𝑉𝑠
(8)
𝐴𝑝𝑔 = {
𝑅
𝐴𝑝𝑤 = {
𝐴𝑡 𝑖𝑓 𝑉𝑔 ≤ 𝑉𝑠
𝐴𝑡 − 𝐴𝑔𝑤 𝑖𝑓 𝑉𝑔 > 𝑉𝑠
(9)
where Vs is a spherical volume of radius R. These formulas are based on lowestenergy fluid configurations and limited empirical data. As such, it should be
noted that this method can only offer a rough approximation and is not a
substitute for in-depth modeling, and that other ullage locations and geometric
configurations are possible even in simple containers.
Figure 3. Some possible ullage
configurations in microgravity
IV. Propellant-Ullage Equilibrium Time
Another factor affecting the rate of ullage expansion is the time required for the propellant and ullage to arrive at
their (approximate) final conformation. The longer the ullage remains in an agitated state with more surface area in
contact with propellant, the faster it expands. While there are several equations in the literature related to liquid-gas
equilibrium time in microgravity, their accuracy in large tank applications is an open question. Saterlee and Reynolds1
give the following equation for estimating liquid response time in a capillary-dominated regime:
𝑡=√
𝜌𝐿3
𝜎
(10)
where L is a relevant system dimension (in cylindrical tanks this dimension is D). While this might get us to within
an order of magnitude of the actual equilibrium time, the obvious problem with this type of estimation is the absence
of variables accounting for things like fill fraction, tank architecture, viscosity, and slosh. Weislogel and Ross11 offer
an equation which attempts to take slosh damping, contact angle, and viscosity into consideration, given as
𝑡=
where 𝛼 =
1−sin 𝜃𝑐
cos 𝜃𝑐
𝑅2 (10B 𝜁 A + 0.01𝛼 2 )
𝜐(1 + 𝛼 2 )
, A = −1.2𝛼 2 + 2.2𝛼 + 0.28 , B = 3.9A − 3.32 , ζ = 𝜐 (
(11)
𝜌
𝑅𝜎𝛼 2 cos 𝜃𝑐
1
2
) , υ is kinematic viscosity, θc is
contact angle, R is tank radius, ρ is liquid density, and σ is surface tension. For contact angles of ∼ 0ᵒ, this
simplifies to
𝑡=
𝑅2 (47𝜁1.28 + 0.01)
2𝜐
(12)
for which the authors report an accuracy of ±20%, but advise caution against scaling for tanks of R > 30mm.** It
should be noted that this equation estimates the time it takes for oscillations to subside completely, which may not be
necessary or even desirable for HMT predictions.
2𝑅2
Eq. (12) appears in Weislogel and Ross’ report as 𝜐 (50𝜁1.28 + 0.01), which contains a significant error: The 2 in the first term
is meant to appear in the denominator, not in the numerator. 11 This can be easily demonstrated through an analysis of Eq. (11).
**
NASA Glenn Research Center
4
19 August, 2022
NASA – Internship Final Report
A recent experiment by Crosby, Werlink, and Hurlbert provides a real-time case study against which we can
compare the equations above.4 In the experiment, 3 cylindrical tanks containing water at different fill levels were
observed in weightlessness for ∼3 minutes. In all three tanks, the ullage bubble migrated to the center and became
sandwiched between two masses of fluid as described in the previous section. The interfaces seemed to form rather
quickly (within the first 10 seconds), reaching a fairly steady equilibrium state in approximately 25 s.†† Plugging the
parameters of the experiment into equations (10) and (11) yields 6.85 s and 23.8 s, respectively, while CFD for the
experiment predicted around 30 s.
When transitioning from a gravity-driven to a capillary-driven regime, liquid reaction time is negatively correlated
to surface tension and positively correlated to tank radius. 1,5 It is thus imperative to model oxidizer and fuel
independently, as the differences in their physical properties are substantial. To illustrate, plugging the ESM’s tank,
fuel, and oxidizer properties into Eq. (10) yields reaction times of 276 s for MON -3 and 185 s for MMH, while Eq.
(12) produces 5,642 s and 1,785 s, respectively.7,12 While these figures are of questionable scientific value,‡‡ they
nevertheless suggest that actual MMH and MON-3 formation times are likely to differ significantly, especially in
larger tanks.
V. Conclusion
An accurate nondimensionalized method of estimating surface areas at any given time under thrust has been
established. Rough estimation methods of ullage geometry and position in microgravity given by Eqs. (7), (8), and (9)
are supported by empirical evidence as well as Surface Evolver simulations.2 The comparison of ullage equilibrium
time in microgravity observed experimentally with that predicted by Eqs. (10) and (11) yielded promising results,
suggesting it may be possible to use these equations for simple cylindrical and pill-shaped tanks. However, systems
with complex internal tank architecture should be subjected to in-depth analysis with CFD where more accurate
predictions are desired. At present, we can conjecture from the current art that formation time is short enough that it
can be ignored by HMT until further research is possible.
Acknowledgments
The author would like to thank Michael Cooper and Dr. Kevin Crosby for their significant contributions.
References
Abramson, H.N., “Dynamic Behavior of Liquids in Moving Containers,” NASA SP-106, 1966.
2
Airbus Defense and Space, "Propellant Tank Sloshing Analysis," MPCV-RIBRE-TN-0044 iss 4,
3
Bakkum, A. et al., “Investigation of Propellant Sloshing and Zero Gravity Equilibrium for the Orion Service Module
Propellant Tanks,” Senior Theses, Carthage College, Kenosha, WI, August 2010
4
Crosby, K., Werlink, R., and Hurlbert, E., “Liquid Propellant Mass Measurement in Microgravity,” Gravitational and Space
Research, Volume 9, January 2021, pp 50-61, https://doi.org/10.2478/gsr-2021-0004.
5
Dodge, F., The New “Dynamic Behavior of Liquids in Moving Containers, Southwest Research Institute, San Antonio, 2000,
pp. 65-111.
6
Ibrahim, R, Liquid Sloshing Dynamics: Theory and Applications, Cambridge University Press, New York, 2005, pp. 762813.
7
Marsh, W. and Knox, B., “USAF Propellant Handbooks Vol I: Hydrazine Fuels,” Air Force Rocket Propulsion Laboratory,
Rept. AFRPL-TR-69-149, Air Force Systems Command, Edwards, California, March 1970.
8
Otto, E., “Static and Dynamic Behavior of the Liquid-Vapor Interface During Weightlessness,” NASA TMX-52016, 1964.
9
Siegert, C., Petrash, D., and Otto, E., “Time Response of Liquid-Vapor Interface After Entering Weightlessness,” NASA TN
D-2458, 1964.
10
Stephens, D., Belair, M., and Quinn, F., “A Heat and Mass Transfer Model of the Orion European Service Module Propulsion
Sub-System,” AIAA 2020-3816. AIAA Propulsion and Energy 2020 Forum. August 2020, doi: 10.2514/6.2020-3816
11Weislogel, M. and Ross, H., “Surface Settling in Partially Filled Containers Upon Step Reduction in Gravity,” NASA TM103641, 1990.
12Wright, A., “USAF Propellant Handbooks Vol II: Nitric Acid/Nitrogen Tetroxide Oxidizers,” Air Force Rocket Propulsion
Laboratory, Rept. AFRPL-TR-76-76, Edwards AFB, California, February 1977.
1
Formatted: Not Highlight
Formatted: Not Highlight
Formatted: Not Highlight
Formatted: Not Highlight
Formatted: Indent: First line: 0.2"
††
Video footage of the New Shepherd experiment can be found at https://www.youtube.com/watch?v=n-etd2QPiWk. Several
rough-mesh simple ESM tank CFD simulations using water can also be found on Dr. Crosby’s channel.
‡‡
There is still a question as to the scalability of these equations. Moreover, these figures assume a contact angle of 0ᵒ for MMH
and MON-3, as most of the literature on the subject claims that they are both totally wetting. A primary source to support this
assumption has unfortunately proved elusive.
NASA Glenn Research Center
5
19 August, 2022
NASA – Internship Final Report
NASA Glenn Research Center
6
19 August, 2022