© 2020 Neetesh Sharma
REGIONAL RESILIENCE ANALYSIS: MODELING, OPTIMIZATION, AND
UNCERTAINTY QUANTIFICATION
BY
NEETESH SHARMA
DISSERTATION
Submitted in partial fulfillment of the requirements
for the degree of Doctor of Philosophy in Civil Engineering
with a minor in Statistics
in the Graduate College of the
University of Illinois at Urbana-Champaign, 2020
Urbana, Illinois
Doctoral Committee:
Professor Paolo Gardoni, Chair and Director of Research
Professor Khaled A El-Rayes
Professor Peter W Sauer
Associate Professor Pingfeng Wang
Abstract
Modern urban society’s prosperity depends on the continuous flow of essential resources and services
provided by the critical infrastructure. Ensuring the critical infrastructure’s reliability and resilience is
cardinal to ensure public safety and economic stability. However, past events have highlighted the infrastructure’s vulnerability to disruptions caused by natural or anthropogenic hazards. Furthermore, complex
interdependencies among infrastructure can cause disruptions to propagate within and across infrastructure,
resulting in multi-fold catastrophic consequences on individuals, households, businesses, and communities.
The consequences of past disasters have emphasized the need for hazard mitigation and recovery planning
for infrastructure. Case studies of post-disaster recovery of different communities worldwide have indicated
that successful recovery requires effective governance, intensive planning, community engagement, and intelligent use of resources. However, hazard mitigation and post-disaster recovery of infrastructure represent
significant investments. Despite the expected economic advantage of investing in disaster preparedness,
communities, businesses, and governments often struggle to budget their limited financial resources toward
mitigation and recovery efforts. The uncertainty in predicting the occurrence and impacts of future hazards
further increases the complexity of justifying large investments. There is a pressing need for rigorous and
accurate models of infrastructure to reduce societal risk and improve regional resilience.
This dissertation develops a novel classification of infrastructure interdependencies and a general mathematical formulation for modeling interdependent infrastructure. Specifically, the developed classification
partitions the space of infrastructure interdependencies based on their ontological and epistemological dimensions. Under the ontology dimension, infrastructure interdependencies are classified into chronic and
episodic. Under the epistemology dimension, infrastructure interdependencies are classified according to
their mathematical modeling. The proposed classification better enables us to understand and mathematically model several classes of infrastructure interdependencies. The proposed mathematical formulation
models infrastructure as a set of generalized flow networks while using dynamic interfaces to model the interdependencies. Carefully chosen working and benchmark examples illustrate the implementation and the
advantages of the proposed formulation in providing accuracy while tackling the computational challenges.
ii
The dissertation then develops a rigorous mathematical formulation to model recovery, quantify resilience,
and optimize large-scale infrastructure’s resilience. Specifically, a multi-scale recovery process model is
proposed that significantly reduces the computational cost while favoring practical and easily manageable
recovery schedules. The proposed resilience metrics then quantify the regional resilience by capturing the
recovery process’s temporal and spatial variations. A multi-objective optimization problem is then framed
to improve regional resilience in terms of the proposed metrics while minimizing the recovery cost. The
proposed recovery modeling is also integrated into a stochastic life-cycle formulation to account for the
effects of infrastructure deterioration. The proposed approach is illustrated through large-scale examples for
the post-disaster recovery modeling of infrastructure.
Engineering models for critical infrastructure and measures of the societal impact, if developed in isolation, would not be sufficient to improve community resilience. This dissertation integrates the developed
engineering models with existing social science approaches to comprehensively model the impact of hazards
on communities and their recovery. Specifically, in combination with a reliability-based capability approach,
the developed infrastructure models are used to predict the broad societal impact of hazards in terms of
changes in dimensions of individuals’ well-being. Some of these concepts are then explained through an
example, modeling the dynamics of physical-social systems.
Finally, the dissertation also provides an uncertainty propagation formulation for continuous improvement
of the developed models and directing further research and data collection efforts. The proposed formulation
quantifies the relative importance of engineering and social science models in evaluating the desired community resilience objectives. Specifically, a variable grouping using the interface function values’ statistics
decouples the regional resilience analysis into the constituent models, reducing the problem dimensions. The
computationally intensive models are then identified, and experimental design is developed for these models
to reduce the total computation cost. The uncertainty propagation framework is performed using a global
sensitivity analysis based on Sobol’s indices.
iii
To Mommy, Papa, and Didi
iv
Acknowledgments
Firstly, I would like to express my sincere gratitude to my advisor, Professor Paolo Gardoni. I am heartily
grateful for his support and guidance during my PhD. I am also thankful to my dissertation committee. Many
thanks to Professor Khaled El-Rayes for his classes on construction planning, optimization, and decisionmaking, which motivated me to research recovery modeling and optimization. Thanks to Professor Peter
W Sauer for his guidance and insight about power systems dynamics, which helped me immensely in this
interdisciplinary work. Thanks to Professor Pingfeng Wang for his knowledgeable comments and feedback,
which significantly improved this dissertation’s quality. I would also like to thank Professor Colleen Murphy
for the research collaboration on the societal risk and resilience analysis, which provided another critical
dimension to this dissertation.
I am thankful to the funding agencies for financially supporting parts of this research, specifically, the
U.S. National Institute of Standards and Technology (NIST) (Award Number: 70NANB15H044) and the
National Science Foundation (Award Number: 1638346). The views expressed are those of the author and
may not represent the sponsors’ official position. I am also thankful to the Department of Computer Science
and the Department of Civil and Environmental Engineering for allowing me to work as a teaching assistant.
I am very grateful to my fellow research group members who have supported me every step of the way. I
have been fortunate to participate in several collaborations during my PhD. In particular, I want to thank
Armin Tabandeh for a close association through a significant portion of this dissertation. My sincere thanks
to Fabrizio Nocera for collaborating on the classification of interdependencies and Leandro Iannacone for the
deterioration modeling of infrastructure. I am also indebted to my friends Jayant, Kanika, Shashank, Arko,
Kartik, Ayush, Gursimran, Vinay, Abhijeet, Karandeep, Kiomars, Jessica, Veronica, Setare, Vamshi, Jacob,
and several others for their continued support and friendship.
Finally, I want to express my deepest gratitude to my parents and my sister for their support, patience,
and unconditional love. Special thanks go to my nephew Rudru for his nursery rhymes, spreading happiness
during the challenging times.
v
Table of Contents
Chapter 1
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
Chapter 2
Classification and mathematical modeling of infrastructure interdependencies 12
Chapter 3 Mathematical modeling of interdependent infrastructure: An object-oriented
approach for generalized network-system analysis . . . . . . . . . . . . . . . . . . . . . .
43
Chapter 4 Regional Resilience Analysis: A multi-scale approach to optimize the resilience of interdependent infrastructure . . . . . . . . . . . . . . . . . . . . . . . . . . . .
73
Chapter 5 Modeling Time-varying Reliability and Resilience of Deteriorating Infrastructure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
Chapter 6 Modeling and Evaluating the Impact of Natural Hazards on Communities
and their Recovery . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
Chapter 7 Uncertainty Propagation in Risk and Resilience Analysis of Hierarchical
Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
Chapter 8
Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187
vi
Chapter 1
Introduction
1.1
Motivation and Background
Most of the world population now lives in urban areas (WB 2019). The prosperity of the modern urban
societies has been increasingly dependent on the continuous flow of essential resources and services provided by the critical infrastructure such as potable water, electric power, and transportation (Corotis 2009;
Ellingwood et al. 2016; Gardoni et al. 2016; Gardoni and Murphy 2010). Ensuring critical infrastructure’s
reliability and resilience is cardinal to ensure public safety and economic stability (Collier and Lakoff 2008;
Ouyang 2014). However, past events have highlighted infrastructure vulnerability to disruptions caused by
natural or anthropogenic hazards (Bialek 2007). There are also complex interdependencies among infrastructure that can cause disruptions to propagate within and across infrastructure, resulting in multi-fold
catastrophic consequences on individuals, households, businesses, and communities (PCCIP 1997; Guidotti
et al. 2016). Examples include the Northeastern blackout in the United States (US) and Canada in 2003
(NERC 2004), and the planned power outages in California due to wildfire hazard (Woolfolk 2019).
Predicting and preparing for the impact of extreme events requires realistic models of infrastructure.
Such models can be used to understand the infrastructure’s behavior under the stress of disruptive events
and plan to improve their performance. The consequences of past disasters have emphasized the need for
hazard mitigation and recovery planning for infrastructure (Kang et al. 2008; Gardoni and Murphy 2009;
Guikema and Gardoni 2009). Furthermore, case studies of post-disaster recovery of different communities
worldwide have indicated that successful recovery requires effective governance, intensive planning, community engagement, and intelligent use of resources (Johnson and Olshansky 2017). Sub-par governance and
planning typically lead to failure in displaying resilience, even in developed nations with relatively abundant financial resources. For example, after Hurricane Katrina, the recovery of New Orleans suffered from
inefficiencies and lack of leadership and communication (Olshansky and Johnson 2017).
Infrastructure models can only be useful if they provide accurate and precise results to support critical policy decisions. Hazard mitigation and post-disaster recovery of infrastructure represent significant
1
investments (Kane and Tomer 2019). Despite the expected economic advantage of investing in disaster preparedness (NIBS 2018), communities, businesses, and governments often struggle in budgeting their limited
financial resources toward mitigation and recovery efforts (FEMA 2019). The uncertainty involving the occurrence and impacts of disasters and the unavailability of accurate and realistic infrastructure performance
models make it difficult to justify the large investments (WB 2016, 2017).
Gaining stakeholder support for hazard mitigation and disaster resilience requires quantifying the value
of mitigation and recovery efforts in tangible terms. There is a pressing need for rigorous and accurate
models for infrastructure resilience analysis to reduce societal risk. Developing such models involve solving
challenging problems from multiple disciplines such as engineering, statistics, economics, and social science.
This dissertation aims to address some of the fundamental challenges in developing realistic models to
study the infrastructure’s behavior under disruptive events and recommend strategies that can improve the
infrastructure’s ability to recover rapidly. Specifically, the contributions of this dissertation are in four main
areas 1) Classification of interdependencies and mathematical modeling of interdependent infrastructure,
2) Recovery modeling, and resilience quantification and optimization, 3) Modeling the societal impact of
hazards on communities, and 4) Uncertainty quantification in regional resilience analysis. The following
subsections further explain the challenges relating to each of the listed areas and present a brief review of
prior work to provide context for the new contributions.
1.1.1
Classification of interdependencies and mathematical modeling of
interdependent infrastructure
Interdependent infrastructure jointly operate to support the production and distribution of goods and
services (PCCIP 1997; Guidotti et al. 2016). Generally, we can have unilateral dependencies when one infrastructure supports another with no reciprocal support and bilateral dependencies when two infrastructure
support each other. In this dissertation, interdependencies represent both unilateral and bilateral dependencies. Modeling infrastructure behavior requires capturing their interdependencies, which may change
over time during their life-cycle. The first step in enabling the mathematical modeling of infrastructure
interdependencies is identifying, understanding, and analyzing them. There are several explorations and
classifications of interdependencies available in the literature (e.g., Dudenhoeffer et al. 2006; Lee II et al.
2007; Rinaldi et al. 2001; Zhang and Peeta 2011; Zimmerman 2001; Johansen and Tien 2018). However,
current classifications do not clarify the definition and structure of mathematical models that can account
for the different interdependency classes. Furthermore, Current classifications suffer from non-orthogonality,
duplication, bias, and incompleteness. Unbiased and orthogonal classification of interdependencies is neces-
2
sary to capture each class with a corresponding driver in the mathematical modeling. Once the prerequisites
of identifying the classes of interdependencies are satisfied, developing mathematical modeling comes with
two types of challenges. The first set of challenges relates to analyzing the time-varying performance of
infrastructure, and the second set relates to capturing the various classes of interdependencies.
Time-varying performance analysis of infrastructure can assess the loss or reduction in reliability or
functionality. Such changes might be due to the direct physical damage to the systems and the loss or
reduction of functionality of supporting systems (Ellingwood et al. 2016; Guidotti et al. 2016). Analyzing
the time-varying performance of infrastructure has three significant challenges, 1) information on privately
owned infrastructure is difficult to obtain, 2) infrastructure typically have large geographic footprints and
complexity, which require information and subsequent modeling of regions different (potentially significantly
larger) than the region of immediate interest, 3) infrastructure have non-linear failure mechanisms pertaining
to the physics governing the flow of resources through them, causing cascading failures (e.g., voltage collapse,
dynamic instability in power infrastructure, traffic jams in transportation infrastructure, and low pressure in
potable water infrastructure). Data availability affects different infrastructure analyses to varying extents.
For example, Transportation infrastructure data is typically easy to obtain due to public ownership. However,
water infrastructure and power infrastructure data are typically privately owned. Past studies have used
methodologies to generate synthetic but representative models using incomplete data. For example, see
Birchfield et al. (2017) for power infrastructure. The challenge of selecting boundaries for infrastructure
has not been well discussed in the literature. Past studies implicitly select the boundaries such that the
footprints are identical to the region of interest (Dong et al. 2004; Shinozuka et al. 2007). Several methods
have been used for the performance analysis of infrastructure. These can be classified into flow-based models,
topological models, statistical models, and hybrid models (Papic et al., 2011; Vaiman et al., 2012; Song et al.,
2015). Hazard impact studies tend to favor simpler models such as topological connectivity and maximum
flow algorithm to analyze infrastructure performance (Adachi and Ellingwood 2008; Dueñas-Osorio et al.
2007). However, to capture cascading failures and assess infrastructure performance accurately, high fidelity
flow analyses should be used (Motter and Lai 2002). Some studies have applied high fidelity flow analyses
for single infrastructure (Klise et al. 2017; Apostolopoulou et al. 2015; Sauer and Pai 1998). However, past
research has avoided complex modeling and computation for interdependent infrastructure and has typically
used topology-based methods (Lee II et al. 2007; González et al. 2016; Dueñas-Osorio et al. 2007).
The origin of the analysis of interdependencies is in the field of economics. Wassily Leontief won the Nobel
Prize in 1973 for the first mathematical model of interdependent economic sectors, called the input-output
model (Leontief 1986). The input-output model identified that economic sectors have interdependencies
on both demand and supply sides. The model then considered such interdependencies in terms of the
3
monetary value at the economic sector level using linear functions. The input-output model has since been
succeeded by the Computational General Equilibrium model that improves the modeling by including market
prices, demand variation, and considering non-linear functional relations. Infrastructure interdependencies,
however, are typically modeled at a finer resolution. Apart from the economic modeling’s extension to the
infrastructure sectors, several other approaches have been used to model infrastructure interdependencies,
such as empirical methods, agent-based modeling, and fault trees (Ouyang 2014). However, the most common
methods typically model infrastructure as networks with nodes and links representing various localized
and linear components. Each network’s failure is then captured using network connectivity measures or
a universal flow-based analysis (Crucitti et al. 2003; Johansson and Hassel 2010; Guidotti et al. 2017b).
The interdependencies are captured by incorporating the failure probability of infrastructure components,
given the supporting components’ failure. Guidotti et al. (2017b) provide a matrix-based approach to
efficiently compute component failure probabilities in interdependent infrastructure. However, all of the
current approaches suffer from several issues. Firstly, they only allow binary states for network components
and cannot model a reduction in functionality if no component failure occurs. Secondly, the dependency is
modeled across nodes as a probability of failure of one node given another node’s failure. However, other
quantities, in addition to the failure probability, can be of interest. Furthermore, interdependencies among
link-node and link-link pairs cannot be easily modeled and require pseudo nodes to represent links. Thirdly,
all the current methodologies fail to model simultaneous bilateral or looped interdependencies. Finally,
current approaches force a universal method to analyze all of the infrastructure and not allow infrastructure
specific high-fidelity analysis.
1.1.2
Recovery modeling, and resilience quantification and optimization
The resilience of infrastructure is a crucial attribute that has gained much attention within the engineering
discipline over the past two decades (Bruneau et al. 2003; Ellingwood et al. 2016; Guidotti et al. 2017b, 2016;
McAllister 2013). A system’s resilience integrates its performance in the immediate aftermath of disruption
with its recovery process to achieve a desirable performance (Mieler et al. 2015). Sharma et al. (2018a)
identified the following challenges at the core of resilience analysis: 1) quantifying the resilience associated
with a given infrastructure performance and a selected recovery strategy to reach a desirable performance,
and 2) developing a rigorous mathematical model of the recovery process.
Several studies have attempted to quantify the resilience of physical and organizational systems (Bruneau
et al. 2003; Chang and Shinozuka 2004; Cimellaro et al. 2010; Decò et al. 2013; Ayyub 2014; Yodo and Wang
2016). The significance of these contributions is to quantify the resilience of a recovery curve using a simple
4
metric. However, all such metrics only capture incomplete information on resilience. Sharma et al. (2018a)
proposed a mathematically rigorous and systematically expandable set of partial descriptors to measure the
resilience associated with a recovery curve up to a desirable detail. However, current formulations only focus
on the temporal aspects of resilience. For the case of infrastructure, there is a need to consider the spatial
differences in recovery progress.
Modeling of the recovery process is required for the calculation of resilience. Cimellaro et al. (2010)
and Decò et al. (2013) proposed parametric functions for the recovery curves, the shapes of which are
selected based on qualitative explanations of the recovery situation, such as the severity of the initial damage
and preparedness of a system/society in responding to a disruptive event. HAZUS (FEMA 2014) also
uses component recovery curves based on past data such as ATC-13 (ATC-13 1985). However, parametric
functions do not replicate the actual situation of the recovery. There is a lack of explicit relation between the
shape of the recovery curve and its influencing factors. Furthermore, because the recovery modeling is at the
system level, it is not generally possible to use the information (e.g., time and expenditure) gained from the
recovery of one system to model the recovery of another even similar system. Sharma et al. (2018a) rectify
some of these issues by providing a physics-based stochastic model of the recovery process. The physics-based
model builds upon a statistical treatment of the construction management tools to predict a component’s
recovery. Sharma et al. (2018a) also take advantage of the information available at the individual recovery
activities level and model the activity precedence constraints (which collectively determine the scope of
work at the system level). However, when it comes to multiple components distributed spatially as part of
the infrastructure, there are additional constraints such as access/connectivity, crew availability, crew work
continuity, and location-specific constraints (El-Rayes and Moselhi 2001). Existing literature on recovery
modeling of infrastructure (Xu et al. 2007; Ouyang and Wang 2015; He and Cha 2018; Sarkale et al. 2019)
suffer from the issues of 1) simplistic modeling for component recovery times, and 2) not accounting from
additional complexity of scheduling recovery over spatially distributed components.
Resilience is an intrinsic ability. However, possessing the ability alone is insufficient; extensive planning
and management are required to exploit the available resources to their full potential. In the context of postdisaster recovery modeling, planning for resilience constitutes planning and implementing a recovery process
that optimizes specific objectives, referred to as the resilience objectives of the infrastructure or community.
Current research has paid specific attention to the mathematical formulation of the optimization problem for
a minimum-cost recovery schedule (Lee II et al. 2007; Orabi et al. 2009; Cavdaroglu et al. 2013; González et al.
2016; Xu et al. 2019; Wu and Wang 2019). The cost is typically a monetary metric that aggregates direct
repair costs with various consequences of disrupted services. The recovery optimization is then formulated as
a generic scheduling problem with less attention to the issues of time-varying performance of infrastructure
5
and rigorous recovery modeling. Furthermore, the currently chosen objectives do not consider the spatial
disparity in the recovery. Therefore, the optimized recovery schedules may become infeasible or difficult
to implement, communicate, and manage. There is a need for a computationally efficient optimization
framework that can work with high-fidelity models for infrastructure recovery and performance assessment.
Furthermore, the optimization framework should support multiple objectives, such as the infrastructure
resilience metrics, in addition to time and monetary cost.
1.1.3
Modeling the societal impact of hazards on communities
A holistic approach to regional risk and resilience analysis requires 1) engineering tools to model the
physical damage and functionality of interdependent infrastructure subject to multiple hazards, 2) social
science approaches to define the relevant measures of societal impact, and 3) interdisciplinary models to
translate the reduction or loss of infrastructure functionality into the selected measures of societal impact.
The previous subsections of this review have discussed some engineering tools, specifically for modeling infrastructure performance. However, there are additional nuances that engineering tools can model, including
the reliability of structures (Ellingwood 2001; Ramamoorthy et al. 2008; Xu and Gardoni 2016; Dong and
Frangopol 2017), effects of aging and deterioration (Frangopol et al. 2004; Sanchez-Silva et al. 2011; Jia and
Gardoni 2018), and climate change (Lin et al. 2012; Murphy et al. 2018).
There are also available approaches that define, measure, and predict societal impacts. The dollar value
of physical damages, loss of life, and physical systems’ downtime are the usual measures of societal impact
(May 2007; Gardoni and LaFave 2016). However, the need for a broader definition of impacts has led to new
directions in which social vulnerability factors such as are integrated with the functionality of infrastructure
to predict the post-disaster needs for emergency resources and services such as shelters and hospitals (Chang
et al. 2006; Cavalieri et al. 2012; Van Zandt et al. 2012). Social vulnerability factors such as income, gender,
race, age, local development, occupation, and education (Cutter et al. 2003) influence the societal impact of
hazards on communities (Zhang and Peacock 2009; Cutter et al. 2010; Van Zandt et al. 2012). There also
exist various utility-based approaches, for example cost-benefit analysis (Boardman et al. 2017) and multicriteria decision analysis (Köksalan et al. 2011). Utility-based approaches assess societal impacts in terms
of utility lost in a hazard, where utility is a measure of satisfaction. Alternatively, Murphy and Gardoni
(2006, 2007, 2008, 2010); Murphy et al. (2011); Murphy and Gardoni (2011, 2012) and Gardoni and Murphy
(2008, 2009, 2010, 2013, 2014) developed a capability approach to assess the societal impact of hazards on
the well-being of individuals. The Capability Approach was initially developed in the context of development
economics (Sen 1990). Capabilities are the genuine opportunities open to an individual (Sen 1993; Nussbaum
6
2001a,b). Examples of capabilities include the opportunities to be in good health, nourished, and educated.
Such capabilities collectively determine the state of individuals’ well-being.
However, the existing engineering tools and societal impact measures have mostly evolved in isolation
without capturing the interactions among physical systems, socioeconomic institutions, and systems necessary for societal well-being.
1.1.4
Uncertainty quantification in regional resilience analysis
A useful regional resilience analysis requires both a fine understanding and modeling of the underlying
processes (e.g. recovery process, infrastructure performance), as well as a significant recognition of intrinsic
uncertainties and their influences on the resilience objectives. Goal of uncertainty quantification is meaningful characterization of uncertainties in the physical models from the available measurements and efficient
propagation of these uncertainties for a quantitative validation of model predictions (Doostan and Owhadi
2011). There are two major challenges with respect to the uncertainty quantification in regional resilience
analysis 1) high dimensionality of inputs and 2) multi-fidelity of models. Regional resilience analysis models have large number of inputs and parameters with uncertainty associated with them, which makes the
uncertainty quantification a high dimensional problem. The underlying models also have different fidelity
and thus the distribution of computational resources across several simulation models becomes extremely
important because one would prefer to decrease the number of expensive high-fidelity simulations (Perry
et al. 2019). There is no available literature that deals with uncertainty quantification in regional risk and
resilience analysis (Peherstorfer et al. 2018; Iooss and Lemaître 2015). However, uncertainty quantification
techniques in high dimensional problems and multi-fidelity regimes provide useful insight (e.g. Lataniotis
et al. 2018; Kurowicka and Cooke 2006; Peherstorfer et al. 2016). There is a need to identify uncertainty
quantification frameworks that best suit the problem of regional resilience analysis, as well as developing
a formulation which can apply the identified techniques to obtain the relative importance of fidelity in the
various underlying models.
1.2
Research Objectives
This dissertation’s overarching goal is to develop realistic models to study the behavior of infrastructure
in the face of an uncertain operating environment and future hazards and recommend strategies that can
improve infrastructure and communities’ ability to recover rapidly. This dissertation designates research
problems in four main areas to achieve the overarching goal. Section 1.1 discussed the details of the research
problems and their respective challenges. The specific contributions of this dissertation to address the
7
designated research problems are following:
• The dissertation develops a classification of infrastructure interdependencies that is orthogonal, unbiased and supports their mathematical modeling. The proposed classification has two orthogonal
dimensions of infrastructure interdependency. Firstly, the ontology dimension classifies infrastructure
interdependencies based on when and how they exist. Secondly, the epistemology dimension classifies
the interdependencies consistently with the mathematical models used to capture them. The dimension
of ontology has the classes of chronic and episodic. The chronic interdependencies typically exist over
the complete life-cycle of the infrastructure. In contrast, the episodic interdependencies only occur
temporarily and at irregular intervals (for example, during post-disaster recovery). The epistemology
dimension has the classes of 1) hazard and exposure, 2) policy and control, 3) operation and performance, and 4) deterioration and recovery. The hazard and exposure models consider environmental
conditions and disrupting shocks. The policy and control models govern the overall behavior and rules
under which the infrastructure functions. Operation and performance models simulate the infrastructure states and assess their performance, and finally, the deterioration and recovery models provide
the temporal evolution of the infrastructure state. A general mathematical formulation then models
as a set of network layers and quantifies interdependent infrastructure’s performance over time. Each
network layer is characterized using its state variables, and the general measures of capacity, demand,
and supply and derived performances. The identified classes of interdependencies among infrastructure
are modeled using dynamic network interfaces. An interface is defined as a boundary over which network layers interact and is such that dependencies among network layers only exist at the interfaces.
Considering a fixed set of network layers, each class of interdependence requires a separate interface.
A forward interface modifies the values of physical quantities of the supported network layer based on
physical quantities’ values from the supporting network layers. A backward interface then modifies
the values of physical quantities of the supporting network layers based on physical quantities from
the supported network layers. The proposed formulation enables the use of high-fidelity flow analyses
for infrastructure while modeling their interdependencies consistently. The formulation also solves the
problem of modeling simultaneous bilateral or looped interdependencies.
• The dissertation develops a rigorous mathematical formulation to model recovery, quantify resilience,
and optimize large-scale infrastructure’s resilience. The proposed formulation develops a detailed
schedule for the repair or replacement of damaged components and models the effects of the recovery
progression on state variables that define the components. Specifically, a multi-scale recovery process
model is proposed that significantly reduces the computational cost while favoring practical and easily
8
manageable recovery schedules. There are two levels of hierarchy, named Zonal and Local recovery
scales. For each infrastructure, a set of recovery zones partition its components and defines a priority
at the zonal scale. At the local scale, the multi-scale approach identifies the required recovery activities in each zone, assigns the identified activities to available crews, and develops a detailed schedule
for the crews to perform the assigned activities. The proposed resilience metrics then quantify the
regional resilience by capturing the recovery process’s temporal and spatial variations. The proposed
formulation considers the performance measures of infrastructure as functions of time and space. The
resilience metrics are the partial descriptors of the (predicted) recovery surface. The definition of the
resilience metrics is general, such that any sets of resilience metrics can be systematically expanded to
provide additional information about the region’s resilience. A multi-objective optimization problem is
then formulated to improve regional resilience in terms of the proposed metrics while minimizing the
recovery cost. The proposed recovery modeling is also integrated into a stochastic life-cycle formulation
to account for the effects of infrastructure deterioration. Instantaneous versions of the proposed resilience metrics combined with the stochastic life-cycle formulation enable modeling the infrastructure’s
evolution for long-term planning.
• For societal risk and resilience analysis, this dissertation proposes a holistic formulation for regional
risk and resilience analysis, integrating state-of-the-art engineering tools with social science approaches.
Specifically, the proposed formulation uses the Capability Approach to define and evaluate the societal
impact of hazards. Specifically, the infrastructure analyses’ outputs are integrated with the Reliabilitybased Capability Approach (RCA) (Tabandeh et al. 2018a). The formulation of RCA consists of
probabilistic predictive models that provide a natural link between individuals’ capabilities and the
results of infrastructure resilience analysis. The formulation then includes the capability measures
into a system reliability problem to determine the probability that each individual’s well-being is
above or below the desired level. The information from the recovery modeling of infrastructure and
the variations in the socio-economic characteristics are incorporated into a time-dependent reliability
analysis to model the society’s recovery in terms of individuals’ well-being. To illustrate the proposed
formulation, we consider the modeling of the impact of a hypothetical earthquake and the subsequent
recovery of communities in Shelby County, in the state of Tennessee, United States. Specifically,
we model physical damages to buildings and infrastructure, the effects of the loss of infrastructure
functionality, and the impact on specific capability measures.
• For uncertainty propagation and quantification, this dissertation develops a formulation that can obtain
the relative importance of fidelity in the various underlying models of regional resilience analysis. The
9
proposed formulation achieves the goal in two ways. First, statistics of the interface function values
are used to decouple the regional resilience analysis into the constituent models, thereby reducing
the problem dimensions. The computationally extensive models are then identified, and experimental
design is developed for these models to reduce the total computation. A global sensitivity analysis that
can provide quantitative sensitivity indices and explore the model behavior over the range of variation
of the inputs is of most value for the current case. The dissertation uses Saltelli sequences (Saltelli
et al. 2008) as experimental design, and the Sobol’s indices (Sobol 1993) as the importance quantifying
indices.
1.3
Organization of Dissertation
This dissertation is organized into nine chapters. Following this introduction, Chapter 2 discusses the
infrastructure interdependencies classification and introduces the necessary mathematical formulations required to model each of the identified classes of interdependencies. The chapter also provides an example of a
large-scale problem for the post-disaster recovery modeling of power infrastructure, while accounting for the
dependence on the transportation infrastructure. The example shows the dependency of the recovery process’s duration on the resource availability (e.g., crew availability) and access to damaged components due to
disruption in the transportation infrastructure. Chapter 3 presents the proposed mathematical formulation
of the time-varying performance analysis of infrastructure and explains the dynamic interface functions for
modeling interdependencies. A minimum working example illustrates the proposed formulation’s conceptual
contributions while a large scale example illustrates the scalability. Chapter 4 presents the mathematical
formulation to model recovery, quantify resilience, and optimize large-scale infrastructure’s resilience. The
chapter illustrates the proposed approach through a large-scale problem for the post-disaster resilience optimization of interdependent potable water and electric power infrastructure in Shelby County, Tennessee.
Chapter 5 integrates the recovery modeling of infrastructure into a stochastic life-cycle formulation to account
for the effects of infrastructure deterioration. As an example, the formulation is applied to the analysis of the
potable water infrastructure of the city of Seaside in Oregon, United States. Chapter 6 presents a holistic
formulation for regional risk and resilience analysis that integrates state-of-the-art engineering models and
social science approaches to comprehensively model the impact of hazards. The chapter also incorporates
sustainability and resilience as two essential elements in risk evaluation. Some of these concepts are then
explained through a comprehensive example, modeling the dynamics of physical-social systems. Chapter 7
presents a rigorous mathematical formulation to propagate uncertainty through resilience analysis of largescale infrastructure. Finally, Chapter 8 summarizes the crucial contributions and findings of this dissertation.
10
The chapters of this dissertation have been published/submitted as individual journal articles and are thus
designed to be self-contained. Therefore, there is some repetition of background material throughout the
dissertation.
11
Chapter 2
Classification and mathematical
modeling of infrastructure
interdependencies
2.1
Introduction
The well-being and economic prosperity of modern society depend on critical infrastructure and their
provision of goods, services, and resources to communities (Collier and Lakoff 2008; Corotis 2009; Ouyang
2014; Ellingwood et al. 2016; Gardoni et al. 2016; Gardoni and Murphy 2018). Critical infrastructure enable
individuals to achieve valuable states and activities (Murphy and Gardoni 2006, 2007, 2008; Gardoni and
Murphy 2009, 2010). For instance, while having access to energy and being mobile are directly reliant on the
performance of the power and transportation infrastructure, food security and business activities could be
indirectly affected by the reduction in performance of critical infrastructure (Tabandeh et al. 2018a,b; Nocera
and Gardoni 2019b,a). Critical infrastructure are exposed to low-probability, high-consequence hazardous
events (Kröger 2008; Gardoni and LaFave 2016). Past events show the vulnerability of critical infrastructure
to natural and anthropogenic hazards, as well as emphasize the need for the development of mitigation
strategies, urban planning and public policies that can help reduce the impact of hazardous events (Murphy
and Gardoni 2006; Gardoni and Murphy 2014; Gardoni et al. 2016; ?). In the aftermath of a hazardous
event, a timely recovery of infrastructure is of utmost importance to enhance the resilience of communities
(Sharma et al. 2018a, 2019).
Much research has been devoted to assess the performance of individual infrastructure components such
as bridges, electric substations and water pipelines (e.g., Ang et al. 1996; Gardoni et al. 2002, 2003; Choe
et al. 2007, 2009; Banerjee and Shinozuka 2008; Paolucci et al. 2010; O’Rourke et al. 2014; Tabandeh and
Gardoni 2014, 2015; Iannacone and Gardoni 2018), and individual infrastructure such as transportation,
power, and potable water infrastructure (e.g., Albert et al. 2004; Kang et al. 2008; Guikema and Gardoni
2009; Bocchini and Frangopol 2011; Lee et al. 2011; Guidotti et al. 2016, 2017b; Porter et al. 2017; Nocera
et al. 2019; Sharma and Gardoni 2019) when facing a natural hazard. However, critical infrastructure are
generally interdependent, and they jointly operate to support the production and distribution of goods
and services (PCCIP 1997; Guidotti et al. 2016, 2017a). As a result, the modeling of risk and resilience of
12
critical infrastructure requires capturing their dependencies and interdependencies, while also capturing their
deterioration and recovery processes. Generally, we can have unilateral dependencies when an infrastructure
is supported by another one with no reciprocal support, and bilateral dependencies when two infrastructure
support each other. In this chapter, we use interdependencies to represent both unilateral and bilateral
dependencies. The first step in considering infrastructure interdependencies is to identify, understand and
analyze them so they can be mathematically modeled. There are several explorations and classifications
of interdependencies available in the literature (e.g., Rinaldi et al. 2001; Zimmerman 2001; Dudenhoeffer
et al. 2006; Lee II et al. 2007; Zhang and Peeta 2011). However, current literature lacks a classification
that is consistent with the formulation of mathematical models needed to account for the various classes
of interdependencies. Section 2 provides a further discussion on the current research gaps regarding the
classification of interdependencies.
In this chapter, we present a novel classification of interdependencies among infrastructure. We define
two orthogonal dimensions of infrastructure interdependencies, which are the dimension of ontology and the
dimension of epistemology. The dimension of ontology classifies the interdependencies based on when and
how certain interdependencies exist, whereas the dimension of epistemology classifies the interdependencies
consistently with their mathematical modeling. The proposed classification differs from the current classifications available in the literature due to desirable features such as being orthogonal and unbiased, and
being consistent with the mathematical modeling of interdependencies. Furthermore, we define interfaces
as boundaries over which the defined classes of interdependencies exist. Then, we propose a mathematical
formulation to model the defined classes of infrastructure interdependencies. The proposed mathematical
formulation models infrastructure as a collection of networks interacting with each other, and the interdependencies as mathematical mappings that alter the attributes of the interacting networks. As an illustration,
we show how the general formulation can be used to model the power infrastructure and its interdependencies. The proposed formulation is used to model the interdependencies during the post disaster recovery
of the power infrastructure in the north west of Oregon following a seismic event. The example shows the
dependency of the duration of the recovery process on the resource availability (e.g., crew availability) and
access to damaged components due to disruption in the transportation infrastructure.
This chapter is organized into eight sections. Following this introduction, Section 2.2 presents the novel
classification of infrastructure interdependencies, Section 2.3 presents a review of the mathematical representation of infrastructure. Section 2.4 describes the mathematical modeling of interdependencies. As
an application, Section 2.5 models the power infrastructure, and Section 2.6 describes the modeling of
interdependencies between power and transportation infrastructure. Section 2.7 illustrates the proposed
mathematical formulation by a large-scale example. Finally, the last section (Section 2.8) summarizes the
13
chapter and draws some conclusions.
2.2
Proposed classification of infrastructure interdependencies
Critical infrastructure typically interact with each other and jointly support the production and distribution of resources. Interdependencies are defined as the interactions among infrastructure, which influence
the state of the interacting infrastructure. The interdependencies among infrastructure play a crucial role in
defining the current performance as well as the long-term service providing abilities (such as resilience and
sustainability) of infrastructure (Jia et al. 2017).
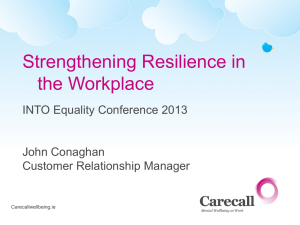
Much research has been done to identify, classify, and define the nature of infrastructure interdependencies. Figure 2.1 shows a classification tree constructed based on the existing literature (e.g., Rinaldi
et al. 2001; Zimmerman 2001; Dudenhoeffer et al. 2006; Lee II et al. 2007; Zhang and Peeta 2011). The six
main branches in Figure 2.1 represent the so-called dimensions of interdependencies. However, most of the
classifications suffer from the common issues of non-orthogonality, incompleteness, duplication, and personal
biases. We list the following examples of the aforementioned issues in the current classifications:
1) Non-orthogonality – The dimensions of environment and infrastructure characteristics are clearly not
orthogonal because the organizational and operational characteristics of the infrastructure cannot be
separated from the business, legal/regulatory etc. classes of the environment dimension.
2) Incompleteness – To enforce a pseudo-completeness for the dimension of types of interdependencies, current classification uses an all-encompassing class logical. However, the logical class of interdependency
is ill-defined for the ones not covered under geographic, physical or cyber.
3) Duplication – Under the dimension of type of failure, escalating is a subset of the class of cascading
failures.
4) Personal biases – Under the dimension type of interdependencies the class cyber gives an undue importance to the information infrastructure. Following the same logic, any individual infrastructure such
as power or water can be given its own class of interdependency.
Although current classifications provide an interesting read and exploration of infrastructure interdependencies, they fail to provide clarity on their mathematical modeling.
14
Temporal
Stressed
and
disrupted
Spatial
Repair and
restoration
Operational
Normal
Organizational
Physical
State of
operation
Infrastructure
characteristics
Cyber
Escalating
Types of interdependencies
Cascading
Type of failure
Logical
Classification of
infrastructure
interdependencies
Common
cause
Geographic
Economic
Linear or
Complex
Coupling
and response
behavior
Business
Health
and safety
Environment
Inflexible
Loose
or tight
Legal and
regulatory
Adaptive
Social and
political
Public
Policy
Security
Technical
Figure 2.1: Current classification of interdependencies
In this chapter, we present a novel classification to interpret and account for infrastructure interdependencies. We define two orthogonal dimensions of infrastructure interdependencies, namely 1) the dimension
of ontology, and 2) the dimension of epistemology. The dimension of ontology classifies the interdependencies
based on when and how certain interdependencies exist. The dimension of epistemology classifies the interdependencies consistently with the mathematical models used to capture them. The following subsections
define the proposed classes and their relationships with the current classes in Figure 2.1.
15
2.2.1
Dimension of ontology
Under the dimension of ontology, we classify the interdependencies into chronic and episodic. Chronic
interdependencies are the interactions among infrastructure that typically exist over the complete life-cycle
of the infrastructure. Chronic interdependencies exist in the typical operation of the infrastructure, they are
permanent and not substitutable in the long term. Chronic interdependencies are typically easy to study
and model because one can look at the typical operating conditions and identify the inputs and outputs
from each individual infrastructure. For example, the dependency of the operation of pumps in the water
infrastructure on a power source is a chronic dependency (Guidotti et al. 2016; Sharma and Gardoni 2020;
Sharma et al. 2019). Episodic interdependencies are the interactions among infrastructure that only occur
temporarily and at irregular intervals. Episodic interdependencies do not exist in the typical operation of the
infrastructure, they are temporary and may be substituted or avoided by incurring additional costs. Episodic
interdependencies are more challenging to study and model because they may require some assumptions on
how infrastructure will behave in a future episode and which episodes are reasonable to consider. As an
example, interdependencies occurring only during the recovery process after the occurrence of a hazardous
event are episodic; any recovery process would depend on the ground transportation infrastructure for
the movement of material and repair crews. However, in the absence of existing transportation support,
material, and recovery crews may be transported using air support by incurring additional costs (as often
done in military applications, critical facility restoration, or remote sites, etc.) (Yu et al. 2010; Mihram
1970). Examples also exist in the interdependencies of deterioration such as the change in the deterioration
rate of the power plant equipment due to the random disruptions of the cooling water supply; or the change
in the deterioration of roads due to the changes in the economic activities in a region (e.g., mining, heavy
manufacturing, and construction).
2.2.2
Dimension of epistemology
Under the dimension of epistemology, we classify the interdependencies consistently parallel to the mathematical models we can use to describe them in mimicking reality. Making the classification consistent to
the mathematical modeling gives us clarity and constraints to effectively partition the space of interdependencies. We identify the following four classes of interdependencies under the dimension of epistemology: 1)
Hazard and Exposure (H&E) 2) Policy and Control (P&C) 3) Operation and Performance (O&P) and 4)
Deterioration and Recovery (D&R).
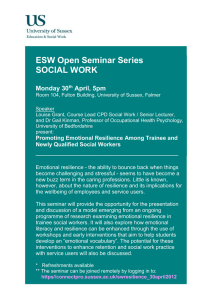
Figure 2.2 shows a schematic representation of the epistemology dimension. The hazard and exposure
models provide the environmental conditions and the occurrence of hazardous events. The policy and control
16
decisions provide the overall behavior and rules under which the infrastructure is supposed to function
(e.g., the recovery objectives). The models for the assessment of the operation and performance give the
infrastructure states and assess their performance under predefined measures, and finally the deterioration
and recovery models provide the temporal evolution of the infrastructure state.
Operation and
Performance
Modeling of infrastructure states and assessment of their
performance under pre-defined measures
Modeling of the environmental conditions
and the occurrence of
disrupting shocks
Pristine Condition
Hazard and
Exposure
Modeling of the rules
under which the infrastructure is supposed to
function (e.g., the recovery objectives)
Policy and
Control
Damaged
Deteriorated
Modeling of the temporal evolution of the infrastructure
state
Recovered
Deterioration
and Recovery
Figure 2.2: Schematic representation of the epistemology dimension
The hazard and exposure models need to capture the interdependencies due to common environmental
causes and collocation. The policy and control decisions need to capture interdependencies such as the
common regulatory/legal considerations, and economic and business decisions. The models for the assessment
of the operation and performance need to capture the interdependencies due to selected boundaries and
resolutions, capacity and demand relations, and cascading and escalating failures. Finally, the deterioration
and recovery models need to capture the interdependencies affecting the time evolution of the infrastructure
state.
2.2.3
Relationships among different classes of infrastructure interdependencies
The classification introduced in Sections 2.2.1 and 2.2.2 can effectively account for the interdependencies
and overcome the highlighted limitations in past research. Figure 2.3 presents a set of Euler diagrams that
17
show how the proposed classification can properly account for the typical dimensions in Figure 2.1. The
two axes of Figure 2.3 represent the two orthogonal dimensions of interdependencies (i.e., the ontology and
epistemology dimensions). The classes we propose are represented as partitions of the vertical and horizontal
axes. The non-orthogonal dimensions in color (only available in the web print) are those from Figure 2.1.
18
Coupling
and response
behavior
Epistemology
O&P P&C
D&R
Epistemology
O&P P&C
Environment
D&R
Epistemology
O&P P&C
H&E
Ontology
Episodic
Chronic
H&E
Ontology
Episodic
Chronic
Epistemology
O&P P&C
H&E
Ontology
Episodic
Chronic
H&E
Ontology
Episodic
Chronic
Infrastructure
Characteristics
D&R
Type of failure
D&R
Epistemology
O&P P&C
Types of
interdependencies
D&R
State of
operation
D&R
Epistemology
O&P P&C
H&E
Ontology
Episodic
Chronic
H&E
Ontology
Episodic
Chronic
Figure 2.3: Partial Euler diagrams for the classification of infrastructure interdependencies
Figure 2.4 presents all the classes in detail. The dimensions in Figure 2.1 are further subdivided into
their underlying classes, and we represent their relationships as overlaps among each other.
19
Ontology
Episodic
Linear
Complex
Common cause
Geographic
Organizational
Policy &
control
Operation &
performance
Adaptive
Inflexible
Operational
Environment
Normal
Physical
Cascading
Cyber
Escalating
Temporal
Spatial
Deterioration
& recovery
Epistemology
Hazard &
exposure
Chronic
Repair
Disrupted
Figure 2.4: Euler diagram for the classification of interdependencies
2.3
General mathematical formulation for modeling the
time-varying performance of individual infrastructure
To discuss the modeling of the different types of infrastructure interdependencies, it is first important
to introduce the general mathematical formulation to model infrastructure. For completeness, this section
briefly reviews the work presented in Sharma and Gardoni (2020) for infrastructure modeling, Sharma et al.
20
(2020b) and Jia et al. (2017) for temporal evolution of infrastructure, and Sharma et al. (2018a) for resilience
quantification. We also discuss how these models need to be modified to model the interdependencies (details
in Section 2.4).
Following Sharma and Gardoni (2020), we represent infrastructure using graph theory. Graphs are
mathematical structures amounting from pairwise related objects called vertices (points or nodes) and the
relation between a pair of nodes as edges (arcs, lines or links.) Mathematically, a graph is written as
G = (V, E) , where V is the set of nodes and E is the set of links. Sharma and Gardoni (2020) defined
networks as graphs in which the nodes and links possess attributes like names, hierarchy, functions, type, and
state variables in addition to their topological identities (i.e., the pairwise relations that define the graphs.)
Thus, an infrastructure is represented as a collection of networks, where each network captures a specific
feature/function of the infrastructure (e.g., a network can describe the connectivity and physical damage of
the infrastructure, and a flow network can describe its functionality.) The collection of all networks is written
as G = G[k] = V [k] , E [k] : k = 1, 2, . . . , K , where superscript [k] represent the quantities for network k.
2.3.1
Footprints, boundaries and resolutions
The definitions of the (modeling) footprints, boundaries, and resolutions are the first step in modeling the
performance of infrastructure. A footprint needs to be defined for both the hazard and the infrastructure.
For the modeling of the hazard, the footprint defines the region over which the hazard needs to be modeled
or propagated. For the modeling of the infrastructure, the footprint defines the spatial portion of the
infrastructure that we need to model. The boundaries are defined as the frontiers that mark the limits of
the footprints.
Each footprint generally has to include the region of interest but could go beyond the region of interest for
modeling considerations. In general, the hazard footprint must be at least as big as the largest network and
it has to include the source(s) of the hazard. The network footprints are based on the type of performance
assessment (structural reliability, service availability), existence of physical boundaries, and the location of
strategic components (Sharma and Gardoni 2020, 2019; Nocera and Gardoni 2019b,a).
The resolution defines the level of details that the hazard and network model(s) can capture (Sharma and
Gardoni 2020). For the hazard, the resolution needs to be defined for the spatial, and temporal modeling.
The spatial resolution defines the units of area for which the intensity measure is sampled at any given time.
The temporal resolution defines the units of duration for which the intensity measure is sampled for a given
area.
Spatial resolutions of the hazard can be selected based on the region of interest. Heterogeneous spatial
21
resolutions can capture high spatial variability in the proximity of the region of interest, whereas the spatial
resolution can decay as we move farther from the region of interest (Guidotti et al. 2020b). Temporal
resolution of the hazard can be selected based on the time of maximum impact on the region of interest.
Heterogenous temporal resolution can capture high temporal variability around the time of maximum impact,
and decay as we move father away from the time of maximum impact (Contento et al. 2020).
In case of networks, we need to define the hierarchical resolution in addition to the spatial and temporal
ones. The spatial resolution of a network corresponds to the level of details in the topology. The level
of detail defines the tributary areas, which are the partitions of the region of interest served by individual
infrastructure elements. The size of the tributary areas decreases with the increase in the level of detail.
In the limiting case, the tributary areas correspond to each individual customer. The temporal resolution
of the network corresponds to how often we assess its performance. The hierarchical resolution defines to
what level of detail we model the function of each network component (e.g., a power plant can be modeled
as single node or multiple generators modeled individually).
The spatial resolution is selected based on the availability of data, choice of performance assessment, variability of hazard impact over the region as well as the computational cost (Sharma and Gardoni 2020). The
temporal resolution is selected based on the temporal scale of variation in the network capacities, demands,
and supplies following a hazardous event (discussed in Section 2.3.2), the modeling of the deterioration and
recovery (Guidotti et al. 2019), and the computational cost. The hierarchical resolution is selected based on
the same factors as the spatial resolution, with one addition that a high hierarchical resolution is required
to capture any available redundancies.
Boundaries and resolutions should also be modified such that the interdependencies can be explicitly
modeled (for example the transportation network boundary and resolutions should be selected such that
accessibility of all other network components can be modeled). Such interdependencies fall under the class
of policy and control in the epistemology dimension.
2.3.2
Models for network state variables, capacity, demand, and supply
The topology of any directed graph with |V | nodes can be represented using a |V | × |V | node adjacency
matrix, A, where Aij = 1{(i,j)∈E} (Watts and Strogatz 1998; Guidotti et al. 2016, 2019). Expanding the
same representation, if a tensor is chosen to represent a general physical quantity for any network with the
first two dimensions identical to A; the indices (i, i) would refer to a node and (i, j) , i 6= j, would refer to
a link. Thus, the state variables for the whole network k at any time t can be structured into a third order
tensor x[k] (t). Among the state variables x[k] (t), we differentiate the control state variables (can be modified
22
[k]
[k]
by an operation controller), x:,:,c∈κ (t), and non-control state variables, x:,:,c∈κ
/ (t) (based on existential state
of the network), where κ is the index set of control variables (Sharma and Gardoni 2020, 2019)
Depending on the x[k] (t) alone, following Sharma and Gardoni (2020), the independent or base-case
capacity tensor field of the network (i.e., without considering the interdependencies with other networks) is
written as
h
i
[k]
C[k] (t) = C x[k] (t) , ΘC
(2.1)
[k]
where C [·] is a second order tensor of functions where each element is a capacity model, and ΘC is a third
order tensor containing the parameters for the respective capacity models. Similarly, the base-case demand
tensor field of the network is written as
h
i
[k]
D[k] (t) = D x[k] (t) , IM[k] (t) , ΘD
(2.2)
[k]
where IM[k] (t) and ΘD are the third order tensors of the intensity measures and model parameters for
each of the component demand models in D [·]. Given the capacity and demand, the supply tensor field
S [·], is a measure of the functional state of the network components. For example, in a flow network, S [·]
would record the flow generated at the source nodes, flow consumed at the demand nodes, and the flow
transmitted through the links (Sharma and Gardoni 2020, 2019; Sharma et al. 2019, 2020b). Similarly, in a
connectivity-based network, S [·] could be used to estimate the distance covered from a set of source nodes
to a set of demand nodes through the links. Applications of connectivity-based analysis to transportation
infrastructure, for example, can be found in Guikema and Gardoni (2009), Kurtz et al. (2016), Guidotti
et al. (2017b), and Nocera and Gardoni (2019b). At a given time t, D[k] (t) is a function of C[k] (t), D[k] (t),
[k]
[k]
x:,:,c∈κ (t) and the supply parameters ΘS and can be written as
h
i
[k]
S[k] (t) = S x[k] (t) , C[k] (t) , D[k] (t) , ΘS
(2.3)
Since the supply depends on the control state variables of the network, ascertaining the control state and
then the supply is an optimization problem (described in Section 2.3.4).
In the case of interdependent infrastructure with multiple networks, the physical quantities that change
are the C[k] (t) and D[k] (t) of the supported networks (Sharma and Gardoni 2020). The supply, S[k] (t),
should then be updated using Eq. 2.3.
23
2.3.3
Network performance at the component level
A general component level performance measure Q[k] (t), at any time t is defined as a second order tensor
field (Sharma and Gardoni 2020, 2019)
h
i
Q[k] (t) = Q C[k] (t) , D[k] (t) , S[k] (t)
(2.4)
For example, in the case of a power flow network, the line loading ratio (i.e., the ratio of the supplied
power to the capacity of the transmission lines and transformers) is an important performance measure for
operational safety; which can be written as S[k] (τ ) C[k] (τ )
1C[k] >0,i6=j , where
and
represent
i,j
element-wise division and multiplication respectively, and 1{·} is an indicator function that takes the unit
value only when the subscript Boolean is True, and zero otherwise.
It follows that in case of interdependent infrastructure, the Q[k] (t) of any supported network changes
due to the underlying changes in the C[k] (t), D[k] (t), and S[k] (t). Such interdependencies fall under the
class of operation and performance in the epistemology dimension.
2.3.4
Supply optimization
For a given C[k] (t) and D[k] (t) , an operator would exercise the available controls by setting the
[k]
values for x:,:,∀c∈κ (t) to optimizeS[k] (t) (Sharma et al. 2020b; Sharma and Gardoni 2019). The objective of optimizingS[k] (t) is to minimize a loss function l [·] over a set of network performance measures
o
n
[k]
Qm (t) , m ∈ {1, 2, . . .} . The optimization problem can be written as
minimize
l
hn
oi
[k]
Q[k]
,
m (t) ; wm , m ∈ {1, 2, . . .}
subject to S[k] (t) C[k] (t) ,
h
i
[k]
S[k] (t) = S x[k] (t) , C[k] (t) , D[k] (t) , ΘS
(2.5)
where wm is a weight vector that captures the relative importance of different components for
[k]
the performance measure Qm (t); S[k] (t) C[k] (t) are the capacity constraints; and S[k] (t) =
h
i
[k]
S x[k] (t) , C[k] (t) , D[k] (t) , ΘS are the network specific constraints arising from the supply equation(s).
The objectives and constraints for the supply optimization can also be modified based on the existing
interdependencies. Such interdependencies fall under the class of policy and control in the epistemology
dimension.
24
2.3.5
Modeling deterioration and recovery
The temporal variation in the state of a network is captured by individually modeling the evolution of
the x[k] (t). Mathematical models for the processes of deterioration and recovery are necessary to model
mx[k] (t). Deterioration may occur due to environmental exposure, regular use, and occurrence of hazardous
events. Recovery may occur due to preventive or reactive maintenance, or repair or reconstruction activities.
[k]
In the case of deterioration modeling, a proper formulation for the evolution of any xi,j (t) should 1)
account for multiple deterioration processes and 2) account for the possible interactions between the different
processes. The formulation proposed by Jia and Gardoni (2018) addressed both aspects; it incorporates the
[k]
interaction between the evolution of different random variables by making the rate of change at time t, ẋi,j (t),
[k]
[k]
dependent on the whole vector of state variables xi,j (t). The rate of change ẋi,j (t), for any component (i, j)
of network k due to any deterioration process is expressed as
h
n
o
i
[k]
[k]
[k]
[k]
ẋi,j (t) = ẋi,j t, xi,j , Zi,j (t) , Θx[k]i,j .
(2.6)
n
o
[k]
where Zi,j (t) is the set of time series of external conditions from time 0 to time t in the complete life
h
i
[k]
[k]
[k]
[k]
[k]
cycle, which includes the environmental conditions Ei,j (t) and IMi,j (t) (i.e., Zi,j (t) = Ei,j (t) , IMi,j (t) ).
Similarly, in the case of the recovery process, the scope of recovery is defined by the set of recovery
objectives based on the magnitude and nature of sustained damage. For given recovery objectives, the
recovery schedule specifies the required recovery activities. Completion of sets of recovery activities are
required to achieve a desired change in the state variables for any component of a network. Also, the
recovery process can be disrupted by the occurrences of deteriorating shocks. Say, a recovery process begins
at time tr , such that the time from the beginning of recovery is defined as τ = t − tr ; the time to the
completion of recovery is defined as tL such that TR = tL − tr is the recovery duration. Then, following
[k]
Sharma et al. (2018a), xi,j at any given time τ during the recovery process can be written as
[k]
xi,j (τ ) =
∞
X
[k]
xi,j (τq−1 ) 1{τq−1 ≤τ <τq } +
q=1
∞
X
4x (τs ) 1{τq−1 ≤τ <τq ,τq−1 <τs ≤τ }
(2.7)
q,s=1
[k]
where xi,j (τq−1 ) is the vector of state variables after completing a recovery step at time τq−1 such that
[k]
[k]
xi,j (τ0 ) is vector of state variables at the beginning of the recovery process; 4xi,j (τs ) is the state change due
to the occurrence of a hazardous event at time τs ∈ (τq−1 , τq ) . A recovery schedule prediction model is used
n
q
to obtain the sequence of stochastic occurrences of the recovery steps, {τq }q=1
, which is also statistically
modeled in Sharma et al. (2018a) as a random process Λr τ, ω; Θ[k]
for completed recovery steps by time
r
τ , where ω [k] is the set of influencing factors (e.g., accessibility of damaged components, weather conditions
25
and resource availability); and Θ[k]
r is a set of model parameters.
Furthermore, the model for interdependent infrastructure recovery from Sharma et al. (2020b) expands
on the one for individual components from Sharma et al. (2018a). Specifically, the infrastructure recovery
model accounts for the additional constraints due to the repetitive recovery activities on multiple components
(e.g., crew availability, work continuity, and accessibility) (El-Rayes and Moselhi 2001).
Sharma et al. (2020b, 2019) proposed a multi-scale approach that develops a hierarchical recovery model
for interdependent infrastructure. The recovery model consists of two scales, namely the zonal scale and the
local scale of recovery. At the zonal scale, the set of damaged components are spatially divided into a set
of recovery zones, where the damaged components in each zone recover with the same zonal priority. Say,
z[k] = zσ(1) , . . . , zσ(nz ) denotes the tuple of the recovery zones, where (σ (1) , . . . , σ (nz )) is a permutation
of (1, . . . , nz ) denoting a choice of priority of the zones. The definition of zones can be based on, for example,
the function, hierarchy, and location of the damaged components. At the local scale, the recovery activities
in a zone are identified and assigned to the available crews. A schedule for the crews is then developed to
perform the set of assigned activities. The crews are divided into multiple teams, where individual teams
work in a single zone at any instance. To model the variations of the state variables for each component,
Eq. 2.7 can be re-written as
[k]
xi,j (τ ) =
∞
X
[k]
xi,j (ξq−1 ) 1{τ ∈[ξq−1 ,ξq )} +
q=1
∞
X
[k]
4xi,j (τs ) 1{τ ∈(ξq−1 ,ξq ),τs ∈(ξq−1 ,τ )}
(2.8)
q,s=1
where like before τ is the time since the beginning of the recovery; and ξq is the time until a recovery
step (indexed q ) is completed. Generally, ξq can be expanded as ξq = τz + τl + τq , where τz corresponds to
the beginning of recovery in the zone; τl corresponds to the beginning of recovery for the component (i, j) ,
relative to τz ; and τq corresponds to the completion of step for the component (i, j) , relative to τl .
The environmental conditions Z[k] (t) for deterioration, and the factors affecting recovery ω [k] need to be
modified to model the interdependencies. Such interdependencies fall under the class of deterioration and
recovery in the epistemology dimension.
2.3.6
Resilience quantification
The resilience quantification of infrastructure is of interest in terms of the service provided. Therefore,
the performance measure for the resilience assessment is derived from the component performances Q[k] (τ )
[k]
a
. If the region of interest is divided into tributary areas {a}na=1
such that ∀a∃ (i, j) |Di,j (t) 0 , then we
Pna
[k]
[k]
[k]
[k]
can map Qi,j (τ ) 7→ Qa (τ ) . We can then aggregate Qa (τ ) into a scalar Q (τ ) = a=1
wa Qa (τ ) , where
wa is the weight for each a . Then, following Sharma et al. (2018b), we measure the resilience using the
26
partial descriptors of Q (τ ) . Specifically, in analogy with the definition of the moments of random variables,
Sharma et al. (2018a) defined the center of resilience ρQ as
TR
τ dQ (τ )
ρQ = 0 TR
dQ (τ )
0
(2.9)
v
u TR
2
u
[τ − ρQ ] dQ (τ )
χQ = t 0 TR
dQ (τ )
0
(2.10)
and the resilience bandwidth χQ as
Since ρQ and χQ can quantify the resilience of any recovery curve, they become useful tools in studying
the impact of interdependencies on the resilience characteristics of infrastructure in a comparative analysis.
2.4
General mathematical formulation for modeling the classes
of infrastructure interdependence
This section proposes a mathematical formulation to model the four classes of interdependencies introduced in Section 3.2 under the dimension of epistemology.
2.4.1
Hazard and exposure interdependencies
A class of interdependencies is generated by the shared hazards and exposure that different networks
might experience. A hazardous event can cause a variety of impacts on different components of the networks
based on their vulnerabilities. If IM[k] (t) represents the third order tensor of values of the intensity measures
of interest for any given network at any time t , then an hazardous event can lead to a set of time series of
n
o
intensity measures for different networks, i.e., IM[k] (t) ; ∀G[k] ∈ G . Accurate modeling of the spatial and
n
o
temporal variation of the intensity measures, IM[k] (t) ; ∀G[k] ∈ G , and the spatial and temporal correlah
i
tions among hazard intensity measures, i.e., corr IM[k1 ] (t1 ) , IM[k2 ] (t2 ) , ∀ (k1 , k2 , t1 , t2 ) are necessary to
capture this class of interdependencies.
2.4.2
Policy and control interdependencies
A second class of interdependencies is generated by the shared policies and control decisions. The
policy and control decisions translate into modeling choices (i.e., model formulations, inputs and solutions strategies).
Examples of modeling choices include the definition of performance measures,
27
h
i
[k]
Q C[k] (t) , D[k] (t) , S[k] (t) , loss functions for the supply optimization, l {Qm (t) ; wm , m ∈ {1, 2, . . .}}
, and the availability of resources for recovery.
2.4.3
Operation and performance interdependencies
A third class of interdependencies is generated by the fact that one network supports the operation and
performance of other networks or its operation and performance are supported by other networks. The
supporting networks modify the base capacities of the supported networks, while the supported networks
modify the base demand on the supporting network.
We can model the interdependencies among infrastructure following Sharma and Gardoni (2020) using
network interfaces. An interface is defined as a boundary over which networks interact and is such that
dependencies among networks only exist at the interfaces. Considering a fix set of networks, each class of
interdependencies requires a separate interface. We define a forward interface that modifies the values of
certain physical quantities of the supported network based on the values of other physical quantities from the
supporting networks. Similarly, we define a backward interface that modifies the values of certain physical
quantities of the supporting networks based on the values of other physical quantities from the supported
[k]
[k]
network. Sharma and Gardoni (2020) proposed the interface functions M C (t) and M D (t) to model this
class of interdependencies (see Figure 2.5), such that
C0[k] (t) = C[k] (t) M[k]
C (t) ,
(2.11)
D0[k] (t) = D[k] (t) M[k]
D (t) ,
Here C0[k] (t) are the modified capacity estimates for the components of G[k] at time t due to the operation
[k]
and performance interdependencies. We can further describe the modifying tensor fields as MC (t) =
n
o
[l ]
[k]
MC
Qαβ : G[lβ ] ∈ πC G[k]
, where the subscripts α and β indicate the quantities interacting with
[l ]
the forward and backward interfaces, respectively. The Qαβ are the relevant performances of the supporting
[k]
network(s) of G[k] , πC G[k] . Similarly for D0[k] (t) , the modifying tensor field can be written as MD (t) =
n
o
[k]
[l ]
[l ]
MD
Qβα : G[lα ] ∈ πD G[k]
, where Qβα are the relevant performances of the supported network(s)
of G[k] , πD G[k] . The modified estimates of the supply measure, S0[k] (t) , and the derived performance
measures Q0[k] (t) can then be obtained using C0[k] (t) and D0[k] (t) in Eq. 2.5. It follows that a network
G[k] itself modifies the sets of base capacities {C[lα ] : G[lα ] ∈ πD G[k] } of the supported networks and base
0[k]
0[k]
demands {D[lβ ] : G[lβ ] ∈ πC G[k] } of the supporting networks via the relevant performances Qα and Qβ ,
respectively.
28
[k]
MC
C0
[k]
Qβ
[k]
MZ
[k]
[k]
ẋ[k]
0 [k]
Qα
S
x[k]
∆x[k]
D0
[k]
[k]
MD
[k]
Mω
Figure 2.5: Dynamics of a network with modifying interfaces
2.4.4
Deterioration and recovery interdependencies
A fourth and final class of interdependencies is generated by the effects of deterioration and recovery
of each network during its life-cycle that are shared with or propagated to other networks. Specifically, to
capture the deterioration and recovery interdependencies, we need to develop interfaces between the deterioration and recovery models of the supported network and the time-varying performance of the supporting
networks.
For the deterioration interdependencies, we develop new interface functions to modify the external conditions as (see Figure 2.5)
[k]
Z0[k] (t) = Z[k] (t) MZ (t)
(2.12)
where Z[k] (t) and Z0[k] (t) are the independent and the modified external conditions after considering
hn
oi
[l]
[k]
[k]
[l]
the deterioration interdependencies. Here MZ (t) = MZ
Qα : G[l] ∈ πZ G[k]
, where the Qα are
[k]
the performances at the forward interface. The new values Z0[k] (t) enter Eq. 2.6 to define the new ẋi,j (t).
For the recovery interdependencies, we develop new interface functions to modify the factors affecting
recovery as (see Figure 2.5)
[k]
ω 0[k] (t) = ω [k] (t) Mω
(t)
(2.13)
where ω [k] (t) and ω 0[k] (t) are the independent and the modified influencing factors after considering
hn
oi
[l]
[k]
[l]
[k]
the recovery interdependencies. Here M[k]
(t)
=
M
Q
:
G
∈
π
G
. The new values ω 0[k] (t)
α
ω
ω
ω
29
change {τq }nq=1 in Eq. 2.7 to define the new x[k] (t) .
2.5
Mathematical formulation for modeling power infrastructure
This section describes an application of the formulation proposed in Section 2.3 to the modeling of power
infrastructure. The power infrastructure is modeled as a collection of two networks, the structural network,
G[1] , and the power flow network, G[2] . The structural network describes the connectivity and physical
damage of the infrastructure. The power flow network describes its functionality in terms of transmission
of power. The structural network supports the power flow network (i.e., the power flow capacity of each
component (e.g., transmission tower, transformer casing, and powerhouse building) is available only if its
physical integrity is sufficient.)
The formulation is developed by bringing in the physics of the problem to reduce the reliance on the
recorded data and obtain more accurate estimate of the quantity of interest. Also, in the proposed formulation, we adopt models that are already individually calibrated and validated. For example, the capacity
and demand models to estimate the damage are based on and validated with recorded data, the recovery
schedule is based on construction management data used in common practice, and the power flow analysis
is based on industry standard techniques. Finally, if data become available, the proposed formulation can
be verified and the models can be updated using, for example, the formulation in Guidotti et al. (2020a) for
the Bayesian updating of hazard and vulnerability models for regional risk analysis using spatio-temporally
distributed heterogeneous data.
2.5.1
Footprints, boundaries and resolutions
As discussed in Section 2.3.1, the infrastructure footprint is selected to include the region of interest,
based on the ability to do a performance assessment, the boundaries of ownership and operational control
of the infrastructure, and location of strategic components. Specifically, for the power infrastructure, the
performance assessment refers to a power flow analysis, and the strategic components refer to the power
plants.
Also, as discussed in Section 2.3.1, the resolutions include the spatial, temporal, and hierarchical resolutions of the power infrastructure. The spatial resolution should be as detailed as possible within the region
of interest given the data availability and the computational cost. In case of the power infrastructure the
tributary areas refer to the service areas, which should ideally correspond to individual customers. The
spatial resolution may decrease outside of the region of interest. In the case of the power infrastructure, the
modeling can be done at a lower resolution to only capture the power flow, possibly generated outside of
30
the region of interest, into the region of interest. The temporal resolution is based on the typical rate of
change in the state of the power flow network and the computational cost. The hierarchical resolution is
selected based on data availability (i.e., circuit diagrams and component attributes), choice of performance
assessment (i.e., the requirements of the power flow analysis), and to capture the available redundancy (i.e.,
the redundancy inside the substations and power plants.)
2.5.2
Models for network state variables, capacity, demand, and supply
At a time t , G[1] has the state variables x[1] (t) , structural capacity C[1] (t) , and demand D[1] (t) ;
where the elements of C[1] (t) and D[1] (t) are the capacity and demand models associate to the network
components. The supply S[1] (t) is defined as S[1] (t) = D[1] (t)
1{D[1] (t)4C[1] (t)} . While, at the same time
t , G[2] has state variables x[2] (t) , base-case flow capacity C[2] (t) , and base-case demand D[2] (t) . The
supply S[2] (t) is solved using either a topology-based analysis or a power flow algorithm (Glover et al. 2012).
2.5.3
Network performance at the component level
h
i
[1]
[1]
The forward structural performance Qα (t) = Qα;i,j (t) is written as the instantaneous reliability of
h
i
[1]
[1]
[1]
each of the components, i.e., P Ci,j (t) − Di,j (t) 0|IMi,j (Gardoni et al. 2002). For the power flow
h
i
[2]
[2]
network, there can be several definitions for Qα (t) = Qα;i,j (t) such as the ratio of the supplied power
to the capacity of the transmission linksS
0[2 ]
(t)/C0[2 ] (t)
· 1{C0[2 ] (t)0,i6=j } , the ratio of the power supplied to
0[2 ]
the power demanded at each demand node, S (t)/D0[2 ] (t) · 1{D0[2 ] (t)0,i=j } , or a probabilistic measure such
i
h
[2]
[2]
[2]
as P S0[2 ] (t) − D0[2 ] (t) 4 εtol |MC;i,j (t) , MD;i,j (t) , where εtol = 0.05 · Di,j ) is the tolerance, and
[2]
[2]
MC;i,j (t) , MD;i,j (t) take into account the interdependencies.
2.5.4
Supply optimization
The supply S[1] (t) is defined as S[1] (t) = D[1] (t)
1{D[1] (t)4C[1] (t)} , and there are no control state
variables (i.e., κ[1] = ∅ ). Hence, there is no need for a supply optimization. For G[2] , the typical control
state variables are the active power, reactive power, and the voltage setpoints at the generators, and the
reactive power at the substation shunts (i.e., κ[2] 6= ∅ ). Hence, S0[2 ] (t) is defined as a power dispatch cost
minimization problem (Glover et al. 2012; Sharma and Gardoni 2020, 2019).
2.5.5
Modeling deterioration and recovery
In the case of hazards that affect the structural integrity (e.g., earthquakes and hurricanes), we model the
gradual and shock deterioration of G[1] using Eq. 2.6. We model the recovery of G[1] using the multi-scale
31
recovery process in Section 2.3.5. We then model the deterioration and recovery of G[2] by modeling the
dependencies of G[2] on G[1] (details in Section 2.6.3). In the case of hazards that affect the power flow alone
without affecting the structural integrity (e.g., operator errors), the modeling is done in the same way but
only considering G[2] .
2.5.6
Resilience quantification
As described in Section 2.3.6, the resilience quantification of infrastructure is typically of interest in terms of the service provided.
S0[2 ] (t)/D0[2 ] (t)
· 1{D0[2 ] (t)0,i=j }
0[2]
In the case of the power infrastructure we write Qi,j (t) =
. The resilience of the power infrastructure is then quantified using the
resilience metrics defined in Eqs. 2.9-2.10.
2.6
Mathematical formulation for modeling the classes of
infrastructure interdependencies among power and
transportation infrastructure
This section applies the formulation proposed in Section 2.4 to the modeling of the interdependencies
between power and transportation infrastructure, when both infrastructure are subject to a hazard affecting
their structural integrity. We consider the case of interdependencies between G[2] and G[1] , and the recovery
interdependencies of G[1] on transportation. To study the recovery interdependencies, we also model the
transportation infrastructure as a collection of two networks, the transportation structural network, G[3] and
the transportation connectivity network, G[4] . Details on the modeling of the transportation infrastructure
are available in Nocera and Gardoni (2019a).
2.6.1
Hazard and exposure interdependencies
The networks G[1] and G[3] are vulnerable to hazards affecting the structural integrity. For each hazard,
n
o
we model the spatial and temporal variation of the set of intensity measures IM[1] (t) , IM[3] (t) . To
account for the hazard and exposure interdependencies, we also capture the spatial and temporal correlations
between IM[1] (t) and IM[3] (t) .
32
2.6.2
Policy and control interdependencies
Policy and control decisions affect the modeling choices for the interdependencies between networks.
Specifically, for the power and transportation networks, we have dependencies of G[2] on G[1] , and of G[1]
[1]
[2]
on G[4] . For the first set of dependencies, the modeling choices include the definition of Qα (t) and M C (t)
0[4]
. For the second set of dependencies, the modeling choices include the definition of Qα (t) , ω [1] , and
M[1]
ω (t) .
2.6.3
Operation and performance interdependencies
The operation and performance interdependencies only exist as dependencies of G[2] on G[1] . The
[1]
[2]
[2]
modified capacity C0[2 ] (t) depends on Qα (t) via MC (t) . In this case, the elements of MC (t) are system
[1]
reliability problems that map Qα (t) to obtain C0[2 ] (t) (details in Sharma and Gardoni (2020, 2019)).
[k]
Similarly, the modified demand D0[2 ] (t) depends on Qβ (t) (of any explicitly modeled supported network k
[2]
[2]
) via MD (t) . In this case, the elements of MD (t) capture the user behavior in each a.
2.6.4
Deterioration and recovery interdependencies
The deterioration and recovery interdependencies only exist as dependencies of G[1] on G[4] . The deterioration of G[1] is independent of the performances of all the other networks. However, the recovery of G[1]
depends on the time needed by the recovery crews to travel from one recovery zone to another within z[1] .
The travel times for the links connecting the elements of z[1] are parts of the recovery influencing factors
0[4 ]
ω [1] (t), which depend on Qα (t) via M[1]
ω (t) .
0[4 ]
We estimate Qα (t) using a supply optimization that is defined as a shortest path problem (Newman
i
h
0[4 ]
0[4 ]
[1]
2001; Nocera and Gardoni 2019a). The estimated Qα (t) is used in M[1]
(t)
=
M
Q
(t)
to modify
α
ω
ω
ω [1] (t) used to obtain τz , in the equation ξq = τz + τl + τq . The details on the transportation network
performance analysis can be found in Nocera and Gardoni (2019a).
2.7
A benchmark example
This section uses the proposed formulation to model the power infrastructure and its interdependencies.
The region of interest is the north west of Oregon, where the possible vulnerable components are power
plants and substations, transmission lines and bridges. As a hazard, we consider a (hypothetical) earthquake
with magnitude MW = 7.0 and epicenter at 45.81◦ N and 124◦ W originated from the Cascadia Subduction
Zone. To characterize the excitation at the site, we define IM[1] = IM[3] = [P GA; Sa ] , where P GA is the
33
Peak Ground Acceleration and Sa is the Spectral Acceleration at the natural period of the structure. The
hazard footprint includes the footprint of the power infrastructure (discussed later) and the epicenter of the
n
o
earthquake. To obtain IM[1] (t) , IM[3] (t) at the site of the vulnerable components, we propagate the
scenario earthquake using Ground Motion Prediction Equations (GMPE) in Boore and Atkinson (2008). To
n
o
capture the spatial variation of IM[1] (t) , IM[3] (t) , we model the hazard using a homogeneous spatial
resolution of 0.01◦ . The example considers the occurrence of a single main shock, therefore there is no need
to choose a temporal resolution for the hazard.
2.7.1
Modeling the power infrastructure
The power infrastructure footprint is selected according to the major transmission cuts (boundaries)
provided by the Western Electricity Coordinating Council (BPA 2018). We model the power infrastructure
for the entire Oregon, the Southern half of Washington and some portions of California and Idaho (see Figure
2.6). The local owner PacifiCorp operates the power infrastructure in north west of Oregon, while several
other owners (e.g., Bonneville Power Administration, Pacific Gas and Electric Company) operate the power
infrastructure outside the north west of Oregon within the selected footprint of the region.
34
!
C
!
H
!
C
!
H
(
!
!
C
30
£
¤
!
?
!!
?
?!(
(
!
(?
!
!
!
?
? !(
(
@!
(!
!
!
(
( !
!
(
(
!
30
£
¤
!
? !(
@
(
!
!
@!(
!
H
@
!
!
@
!
C!
C
H
@
@ !
!
!!
(
(
(
!
(
!
!!
@
@
( !
!
(
101
£
¤
@
!
(
!
(
!
(
!
!
(
(!
!
(
(
(!
!
(
!
(
!
(
!
!
?
202
101
£
¤
(!
!
(
(
!
(
!
!
(
(
!
(
!
!
?
(
!
( (
!
!!
(!
(
(
( !
!
(
!!
(
(
!
(
(!
!
!
?
( (
(!
!
! (
(
!!
(
!
( !
!
(
26
£
¤
53
(
!
!
(
(
!
(
!!
(
(
!
(
!
Cl
a
t
s
opCount
y
0
5
1
0
Mil
e
s
2
0
Po
we
rpl
a
nt
s Su
bs
t
a
t
ions[
k
V] Tr
a
ns
mis
s
io
n[
kV]
!
H Co
!
a
l
138
≤138
?≤
!
H Ga
@2
!
2
30
s
30
!
H Hy
!
3
45
U3
dr
o
45
!
!
H Nu
C5
5
00
c
l
e
a
r
00
!
H Win
d
Loc
a
lOwne
r
s
hip
(
!
Br
idge
s
Roa
ds
!
C
!
?!
?
!
C!
C
@
!
!
H
@
!
!
H
!
?
!
H
!
?
!
H
!
?
@
!
!
H
!
C
@
!
!
?
?
?!
@ !
!
C
!
?!
!
H
!
H
!
H!
H
!
H
!
H
!
H
!
H
!
H
!
C
!
H
!
C
!
H
!
C
!
!
H
C
!
H
@
!
!
H
@
!
!
C
@
!
?!
?
@
?!
!
@ !
?!
@!
!
?
C!
@
!
?
?
!
C
?!
!
? !
!
?
?
!
U
!
?!
!
?
@
!
!
C
!
C
?! !
? !
!
? !
C
?!
?
?
@@ !
!
!
?!
C
!
C
@
!
?
!
@
!
?
!C !
??!
@!
!
!
!
?
C!
!
?
C
?
!
!
?
?
!
?!
@
!
!
?!
?
@
!
!
?
@!
!
@
@
!
!
C
C
!
?!
!
C
!
?!
@ !
!
?!
? !
?!
?
!
?
?!
? !
!
?
@
@!
!
?
!
?
@
!
!
?
!
?
!
?
@
!
?!
!
C
?!
@
!
?!
@
!
@
!
@
!
!
C !
C!
@
!
! !
C!
C !
?
?
@C
!
!
?
!
!
?
!?
?
@
!
@
!
!
!
?!
!
?
! ?
?
?
!
?
!
?
!
?
!
C
!
?! !
@
!
!
!
?
!
?? @
?
!
?
!
?
!
?
!
C!
C!
C
@
@!
!
!
?
!
? !
?
!
?!
@ !
@
!
@ !
C
?!
?
@ !
!
!
C !
C
@
!
!
?! ?
!
!
?
?
? !
@
!
!
C
!
?
!
? !
?
!
?
!
?
!
!
?
?
@
!
!
?
!
?
?
!
?!
!
?
!
?
!
?
?
@!
!
U!
!
H
!
C
!
H
!
H
C
@!
!
@
!
!
?
!
H
!
@
!
?
!
H
H
!
! !
C
!
H
!!
H
HH
@ !
!
@
!
H
@
@!
!
!
?!
?
!
?
!
!
H
C
!
H
@
!
@
!
@
!
!
@
@
!
@
!
?!
@
!
C
!
@
!
?
!
H
@
!
!
@
@
!
!
H
!
H
@
!
!
H
@
!
@
!
!
?
!
H
!
H
!
H !
!
HH
St
a
t
eBounda
r
ie
s
0
5
0 1
00
Mil
e
s
2
00
Figure 2.6: Modeled Infrastructure
The spatial resolution is selected based on the availability of data as well as the performance assessment
method (i.e., a steady state nonlinear Newton Raphson power flow analysis (Glover et al. 2012).) Within
the boundaries, we model each individual power plant, substation and the transmission lines connecting the
power plants and the substations. The stability of the flow analysis depends on the transmission portion and
the total power demand at the substations. Therefore, there is no need to model the distribution circuits
connecting the substations to the individual customers.
The temporal resolution of the power infrastructure is selected based on the computational cost of the
flow analysis, and the rate of change in the state of the power infrastructure. Since we expect that the
recovery will be completed in several hours, we select an hourly rate of analysis as the temporal resolution.
The hierarchical resolution of the power infrastructure is selected based on the same factors as the spatial
resolution and to capture any available redundancies in the network.
We model multiple components of the power plants and substations to capture the redundancy in the
power infrastructure. Based on the selected footprints and resolutions, G[1] has 45 generators, 142 transformers, 4,740 disconnect switches, 2,370 circuit breakers, and 5,135 intra-substation circuits. While, G[2]
35
has 45 generators, 142 transformers, 395 buses, 175 loads, and 3 capacitor bank shunts. In addition, G[1]
and G[2] have 382 transmission lines. Figure 2.6 shows the location of each component.
[1]
Following FEMA (2014), we model the capacities Ci,j (t) as log-normally distributed random variables
[1]
[1]
parameterized based on xi,j (t) , which are the voltage and the foundation type. The demands, Di,j (t)
[1]
are directly equal to IMi,j . The supply S[1] (t) = D[1] (t)
1{D[1] (t)4C[1] (t)} as defined in Section 2.5.2.
[2]
The capacities Ci,j (t) are in terms of the variables that define the power flow analysis, namely the active
[2]
and reactive power defined based on xi,j,∀c∈κ
/ (t) (i.e., class, material, and geometry of the elements). We
[2]
calculate Di,j (t) (also in terms of active and reactive power) at the demand loads based on the population
[2]
in the corresponding service area a . The control state variables xi,j,∀c∈κ (t) include voltages, phase angles,
[2]
impedances, active power, and reactive power. The supply Si,j (t) is defined in terms of the active and
[1]
reactive power flow. The forward structural performance Qα (t) is defined as in Section 2.5.3, and the
h
i
0[2 ]
0[2 ]
[2]
[2]
Qα (t) is the probabilistic measure defined in Section 2.5.3, i.e., P Si,j (t) − Di,j (t) 4 εtol |MC;i,j (t) .
0[2 ]
[2]
We obtain Si,j (t) with a non-linear, Newton Raphson power flow analysis, where xi,j,∀c∈κ (t) are obtained
by solving an optimum dispatch problem (Brown et al. 2017). Specifically, the optimum dispatch problem
is a linear programming problem with the objective of cost minimization, and the decision variables as the
active power generated at each of the generators in G[2] . The Newton-Raphson power flow analysis uses
the solution from the optimum dispatch problem to obtain a unique solution of the system of non-linear
algebraic equations governing the flow of power in G[2] . More details on the power infrastructure modeling
and performance analysis is available in Sharma and Gardoni (2020, 2019).
For modeling the recovery of the damaged components in G[1] , the elements of z [1] are the individual
substations. We define four recovery projects based on repair type and ownership 1) Local critical repairs,
required to recover non-functional components owned by PacifiCorp; 2) Local noncritical repairs, required to
recover the functional (because of redundancy) but damaged components owned by PacifiCorp; 3) External
critical repairs, required to recover non-functional components operated by the other owners; and 4) External
non-critical repairs, required to recover the functional but damaged nodes operated by other owners. We
assign different recovery teams to each of these four projects. The base productivity rates for the identified
recovery activities are from Sharma et al (2019a,b). Each local recovery team consists of 2 diagnostic crews
and 4 repair crews, whereas each external recovery team consists of 5 diagnostic crews and 10 repair crews.
To study the impact on and the recovery of power infrastructure services, we define Q (t) =
Pna
a=1
0[2]
wa Qa (t) , where wa are the population in each a. To study the differences in the recovery over
space and time of different regions, we consider two specific definitions of the region of interest: one is
Clatsop County that includes the first 11 service areas (i.e., {a}11
a=1 ), the second is the whole network that
includes all 175 service areas (i.e., {a}175
a=1 ).
36
2.7.2
Modeling the classes of dependencies of power on transportation
infrastructure
This section provides the details of dependencies of G[2] on G[1] , and G[1] on G[4] . For the hazard and
n
o
exposure interdependencies, IM[1] (t) , IM[3] (t) only needs to be estimated at the time of occurrence of
the earthquake, i.e. t = t0+ . The spatial correlations at t = t0+ are captured directly by the GMPE. While,
there is no temporal correlations because we are only looking at single time.
[2]
For the policy and control dependencies of G[2] on G[1] , MC (t) corresponds to the definition of the limit
state functions of each bus in G[2] depending on the structural reliability of transformers, disconnect switches
and circuit breakers inside each bus in G[1] (Sharma et al. 2020b, 2019). For the case of the policy and control
dependencies of G[1] on G[4] , since the power infrastructure is expected to recover significantly faster (within
the first week, Sharma et al. 2019) than the transportation infrastructure (expected to recovery in several
month Nocera and Gardoni 2019b), we assume that the state of the transportation infrastructure remains
0[4 ]
0[4 ]
the same as at t0+ during the recovery of the power infrastructure (i.e., Qα (t) = Qα (t0+ ) , ∀τ ∈ [0, TR ]
0[4 ]
.) To model such dependencies we define Qα (τ ) and ω [1] in terms of travel time and M[1]
ω (t) , which
accounts for the change in ω [1] due to damage in G[4] .
i
h
[2]
To model the operation and performance dependencies of G[2] on G[1] , we write P MC,i,j (t) = 0 =
h
i
[2]
[1]
[2]
P Fi,j |IMi,j , where Fi,j denotes the disconnection of a generator, bus or a transformer (i, j) ∈ G[2] , due
to loss of structural integrity of the corresponding generators, transformers, disconnect switches, and circuit
[2]
breakers in G[1] . Further details to estimate Fi,j for each element type are in Sharma et al. (2020b, 2019).
In terms of the deterioration and recovery dependencies, the recovery of G[1] depends on ω [1] expressed
as the travel time on the links of G[4] connecting z[1] . For any pair of recovery zones zσ(i) , zσ(i+1) ∈ z[1]
[4]
, we write the preferable travel path at any given time t as pzσ(i) ,zσ(i+1) (t) ⊆ E [4] , and the travel time on
[1]
[1]
the path before the disrupting earthquake as ωzσ(i) ,zσ(i+1) (t0− ) . Also, Mω;zσ(i) ,zσ(i+1) (t) dynamically maps
[4]
[1]
pzσ(i) ,zσ(i+1) (t) to ωzσ(i) ,zσ(i+1) (t) . Then, we write the starting time of the recovery work in zone zσ(i+1)
considering a recovery team traveling from zone zσ(i) as
h
i
[1]
[4]
−) M
τzσ(i+1) = ξzσ(i) + ωz[1]
(t
Q
(t
)
0+
0
ω;zσ(i) ,zσ(i+1)
α
σ(i) ,zσ(i+1)
(2.14)
[1]
where ξzσ(i) is the completion time of recovery in zone zσ(i) . We estimate Mω;zσ(i) ,zσ(i+1) (t) as
P
[4]
[4] (t) Qα;i,j (t)
∀(i,j)∈p
[1]
M[1]
, θMω
ω;zσ(i) ,zσ(i+1) (t) = min P
[4]
Q
(t)
[4]
∀(i,j)∈p (t0− ) α;i,j
[1]
where θMω is the default value to use when the numerator
37
P
∀(i,j)∈p[4] (t)
[4]
(2.15)
Qα;i,j (t) → ∞ , i.e., the zones
[1]
are disconnected because of disruption in G[4] . In the current example, we set θMω for each pair of zones
such that the maximum travel time within any zones is equal to travel time before the event between any
h
i
[1]
zones (i.e., maxzσ(i) ,zσ(i+1) ωzσ(i) ,zσ(i+1) (t0− ) ) , which we calculated to be 4.5 hours based on an average
speed of 30 mph, which is typical for heavy equipment. We also using 30 mph an average speed of the
[4]
traveling recovery team to estimate Qα (t0+ ) . The recovery of G[1] can then be updated using Eq. 2.8.
2.7.3
Results and discussion
Figures 2.7 and 2.8 show the recovery curves (with 90% confidence bands) of the power infrastructure
performance for the two regions of interest. For each region of interest, we consider two cases, first we
only consider the dependencies of G[2] on G[1] , Q[1→2] (τ ) , and in the second case we also consider the
dependencies of G[1] on G[4] , Q[4→1→2] (τ ) . The figures also show the mean recovery times of the substations
in both cases. We also observe delays of up to 12 hours in the mean recovery times of Clatsop County, and
18 hours for the whole network. The delays also worsen as the recovery teams travel further towards the
damaged region (see Figure 2.7).
38
!
!
?
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !
!
!
! !
! !! !!
! !
! !
!
!
!
! !
! ! ! !! !!
! !
! !
!
!
!
! !
!
! !
! ! !! !! !
!! !
!
! !
! !!
!
! !
! ! ! !
!
! !
!! ! !
! !
!
!
!
! !
! !
!! ! !
! !
!
! !
!
! !
!
!! !
!! !
! !
! !
! !
! !!
!
! !
! !
! !
!! ! !
! !
! !
!
!
!
! !
!! !
!
!! !
! !
! !!
!
! !
!
! !
!! ! !
!
!
! !
! !
!
! !
!
! !
!! !
! !!
!! !!
!
!
!
!
!! !
!
!
! !
! !
! !!
!
!
! !
! ! !
!! ! !
! !
!
! ! ! ! !
!
!
! !
!
!
! !
!! !
!
!
! !
! !
!
!
! !!
!
! !! !! !
!
! !
! !
!! ! !
!
! !
!
! !
!! ! ! ! !
!
! !
! !! !
! !!
! !
!
! !
!! !
! !
! !
!! ! !
! !
! ! !
!!
!
! !
! !
!! !
! !
! !!
!
!! !
!! !
!
!
! !
! !
!
! ! !
! !!
!!
! !
! !
!
!
! !
!! !
! !
! ! !
! !! !
! !
! !
! ! !! !
! !
! !! ! ! !
!
!
! !
! !
!
! !
! !
! !!
!
! !
!
!
! !
! ! !!
!
!
! !
!
! ! !!
! !
!
! !
! !
!! ! !
! !
! !
!
!
!! !
!
! !
! !
! !!
!
! !
!
!! !
! !
! !
! !
!
!
!
!
!!
!
!
! !
!!
!
! !
!
!!
!
!
! !
!! !
!
!
!
! !
!
!!
! !
!
!
!! !
! !
! !
! !
!
! !
! !
! !
! !
!
! !
! !
! !
! !
!
! !!
! !
! !
! !
!
!!
! !
! !
!! !
!
!
! !
! !
! !
!
! !
!
!
! !
! !
! !
!
!
! !
! !
!
! !
! !
!
!
!
! !
!
!
! !
!
! !
!
!
! !
!
!
! !
!
!
! !
!
! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
1
confidence band
84
96
72
84
96
60 72
84
!
!
!
!
!
!
!
!
@
!
!
72
!
!
!
!
!
!
!
!
!
!
!
!
!
48 60
τ [hr]
!
!
!
60
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
39
?
@
!
!
48
!
48
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
?
!
?
!
36
!
24
!
12
!
0
!
36
!
24
!
12
!
0
!
36
!
Q[4→2→1] (τ )
0.5
!
0.5
!
!
!
?
?
!
?
?
@!
!
24
!
!
! !
!
?
!
12
!!
!
?
!
!
!
!
!
!
!
!
!
!
!
!
!
0
0
!
0
!
Q[2→1] (τ )
1
confidence band
!
?
Figure 2.7: Predicted performances and mean recovery times for Clatsop County
!! !! !!
!! !! !! !
! !! !! ! !
! ! !! ! !
!! ! !! !! !!
! ! ! !
!! !!! !! !! !
! ! ! !
!! !!! !! !
! !! ! ! !!
!
!
!
!!!!! !
! !! !! !!
!
!
! ! ! !!
!
!
!!!!
! !
!
!! !! !
!
!!!
!
!
!
!
!!
!
!!
!
!
!!!
!
!
!
!
!!
!!
!!
!!
!
!
!
!!!!
!
!! !!! !! !!
!! !
!
! !
!
!
!!
!! !! !
!
! !
!!!
!
!
!
!!
!
!
! !
!!!
!
!
! !!!! ! !! !!
!
!
!
!!
!!
!!
!!! !
!!
!!
!
!! !
!
! ! !!
!!!
!
!!
!
!
!
!!
! !!
!
!
!
!
!!
!!
!
!
!!!
!!
!!
!!! !
! !!
!!!
!
! !! !!! !! !!
!!
!!
!
!!!!
!
!!!
!
!
!!
!
! !!
!
!!
!
! !!
! ! ! !!! !
! !! !
!
!
!!!
!
!! !
!!
!
!
! !!! ! ! !
!!!!
!
!
!!
!! !
!!!
!
!!
!
!!
!!
!!
!!!
! !!
!
!
!
! !! !! !!! !
!! !!!
!!
!
!
!
!!
!!
!
!
!
!
!!
!
!
!!!
! !!
!
!
!
!
!
! !! !! !! !
!
!!! !
!!!
!!
! !!!
!
!
!!
!!
! !!
!!
!
!!
! !! !! !! !
!
!!
!!!
!!
!!!
!!!
!!
! !!
!!
!
!!
!!!!!!
!
!
!!
!!
!!
!!! !
!!
!!!!!!
!!
!
!
!
!!
!!
!!!!
! !!
!!
!
!!!!
!
!!!
!!!
!!!!
!!
!
! ! ! ! ! ! ! ! ! !! !!! !!! !!
!
!!
!
!
! !
!!
!
!!
!
! ! ! !!! !
!
!
!
!
!!
!
!
!!
!! !
!!!!
!
!!
!
!!!
!
!! !
!!
!!!
!! !
!
! !!!
!!
!!
!!
!!!
!
! !! !
!
!
!!! !
!
! !
!!
!
!!
!
! !!
! !!
!
!
!!!!!
!!
!
!
!!
!
!!
! !
!!
!
!!
!
!
!
!!
!
! ! ! ! ! !! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! !
!
!!!
!
!
! !! ! ! ! ! ! !! !! !!!! !!
! !! !!!
!
!!!
!!
!!
! !
!!
! !!!
!
!
!
!!
!!
!
!! !!
!! !! !! !!
!!
!!!!!
!!!
!!
!!!!!
!!
!
!
!!!
! !!
!!
!!!
!
!!!!
!! !! !
! !
!
! ! !!!! !!!
!
!!! !
! !!! ! !! !
!!!
!!
!!!!
!
!
!
!
!
!
!! !!! !!! !
!!
! !!! !! !
!!!
!!
!
!
!!
!! !
!!
!!
!!
!!
!!
!
! !!
!!! !!
!!
!
!
!!!
!!!
!
!
!
!!!
!!! !! ! ! ! ! !!! !!! !!! !!!!
!
!
!!! !!! !!!! ! ! ! !! !!! !
!
!
!
!!
!
!
!!
!
!!!!
!!!
!!
! ! ! ! ! ! ! ! ! ! !! ! !! ! ! !! ! !!! !!
! !!!
! !
!!
!
!!
!! !
!!!
!
!!
!!
! !! !
!
!!
!! !!
! !! ! !
!!!!
!
!! !
!! !! !!! !
!
!!
! !!! !
!
!!!!!
!
! ! !!!! !
! !!
!! !
!!
!! !!!!
!
!
!!
!!!! !!! !
! !
!
!!
!!! !!
!
!
! ! !
!
! ! ! !! !!! !! !! !! !! !!
!!!
!
!! !! !!! ! !
!
!!
!!
!! !! !
!! !
!!!!!
!!
! !!! ! !!
!
!!!!!
!! !
! ! ! ! ! !!! ! ! ! ! !! ! !! ! !! ! !
!!! !
!!
!!
!!!! ! ! !! !
!!
!! !
!
!!
!
!
! ! !!! ! !! !! !! !! !! !! ! ! ! ! ! ! !! ! !! !!!
!
!!
!!!!
! ! !
!
!! ! !!!! !!!
!!
!!! !!
!!
!
! !!! ! !!
!!!
!
!!!
! ! !! !!!! ! ! !!
!!!
! !
!!
!
!!
!! !
!
!!
!!
! !! ! ! !!! !
!
! !! ! !! !!!!!
!
!!
! ! ! !!
!!! ! ! !!
!!!! !! !!!!
!!
!
!
!!! !!!! !
! ! ! !
!
!!!
! ! !
! !
! !! !! ! !! !! ! !!! !!
!!!
!!
!!!
!!! ! !! !!!! ! !!!
! !!!! ! ! !! !!!! !!!
! !!
!!
!!!
!!
!!!!!
!! !!
! ! ! ! ! ! !! ! !
!
!! !!
!!!!
!
!
!!! ! ! ! !!! !!! !! !! !! ! ! ! ! ! ! !
! !
!
!!
!!
!
! ! ! ! !! ! ! !
!!! !
!!
!!
!!!!!
!! !!
! !
!! !!
!!!!!!
!!
!
!!!
!!
!! !!
!!!!!!!
! !
!! !!
!!
! ! ! ! ! ! ! ! ! ! ! ! ! !
!!
!!
!!!!!
!! !!!
!
!
!!!
!
!! !!
!!!!
! ! !
!!! !!!
! !! ! ! !!
!
!!
! !
!!!
!
!!
!!!
! !
!!
!!
!
!
! ! !! ! ! ! !
!!
! ! ! ! ! !!! !!!
!!
!!
!!
!
!
!
! ! ! ! !
!! !
! !
!
!! !!!!! !!!
!
!
!!
!! !
! ! !
!!
!!
!!
!
!
!! !!
!
!!!!
!! !
! ! !
!!!!!
!
!!!!!!!!
!!!
!
! ! ! !! ! !
! !! !! ! ! ! ! ! !
!!!!
!!!!!!!!!!!!!!! !!! !! !!
!!! !!! !!
!!! !
! !!
!!!!!!
! ! !!
!! !
!
!
!
! !
!! !!
!! !!!
!!!!
!!
!
! !
!!! !! ! !
! ! ! ! !!! !!!! !
!!!!!!!
!
!
! !
!!!
!
! ! ! !
!! !
!!! !!!! ! !
! ! !! !! !! ! !! !! !
!!
!
! ! !! ! ! ! ! !
!!
!!!!
!! !!!! !!!! ! !
!!!!!
! ! !!!
!
!
! !!
! ! !
!!!
!
! !! !! !
! ! ! !! ! !
! !
!
! ! !!! !! ! ! !! ! !
!!
!
! !!!
!
!!
!!!!!!
!
!! !!!! !!!
!!!!
!
! ! !! ! ! ! ! !
!!!!!!!
! !!!
! !
!! !!!! !!!!
!
!
! !!!
! !
! ! !! !! !!!! !!! !! !! !! !! !!
! ! !! ! ! ! ! !
!! !!!!!! !!
!!
! !! !!!! !!!! !!! ! !
!
!
!
!!! !
! !!
! !!!!
! ! !!
!!! !!
!!!!!!!! !!!! !!!!!
! !
!! !!! !!! !!!! !! !!!
!
! ! !!!! ! ! !
!!
!! !
!! ! ! ! ! ! ! ! !
!
!
!!! ! ! !! !
!! !!!
!! !! !
!
!
! ! !!! !!! ! !! !
! !! !
! !! !! ! ! ! ! ! ! !
! !! !!!
!! ! ! !
! !!! !!! !!!!
!!!!! !!!! !! !
! !
!!! !!!! !! ! ! !
! ! ! !!
! !
!
! ! !
! !!!
! ! !!!! !!!
! !!!! !!!!!! !! !!! !!!
!! !! !
!! !
! ! ! !!!!!! !
!
! ! !
!
!!!!
!! ! ! ! !
! !
!! !
! !!
!! !!! !!! ! !! ! ! !
!! !!! !!!
!
!!
!!!!!!!! !! ! !
! ! ! !! ! !!!!!! !
!! !!! !
! ! ! ! ! ! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !! !! !! ! !! ! !
!
!
!
!
!
!
!
!! ! !!! !
!
!!
!! !
! !!
! !!! !! !
!!!!!! !!!! !
!!!!!! !! !
! ! !!
!!
! !!
!
!
!!!
!!
! !! !
!!!! !!!!!!
!
! ! !! !
! ! !! !
!!
!!! !! !! !!!!! !!
! !! !
! !!
! !! ! ! !!! ! !
!
! !
!! !
!!!! !!
!!!!!!!!
!! !
!!
!!! ! ! ! ! !
!! !! !
! !! ! ! ! !! ! !! ! !! ! !!
! !! !!!
! !! !
! ! !! ! !
!
! !! ! !!! ! !! !
! ! ! !!!! !!!
! ! !!! !!!
! ! !!!! ! !!
!
! ! !!
! !
! !!
! !! !
! ! ! ! ! !! ! ! !
!
!! !!! ! !
!!
! ! ! ! ! !!! !!!! !!!
! ! ! !!
!! !!!! !
!
!!
! !!
!!!!
! !
! !! !!
!
! !! !
!! !!
!! ! ! !
!!
!!
! !! ! !
! !! ! !
!! !!
! !
! ! ! !!
!! !!!
! !!!
! !
!!! !
! !! ! !
! ! !! ! !
! !!!! !!!! !!!! !!!! !! !
! !!
!!! !!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! ! !!
!
! !
!! !
! ! !!!! !
! ! !! !
! ! !
! !
! ! !
! !!! !! ! ! ! ! !
! !
! !
! !! !
! ! ! ! !!
! ! !
! !! !!!! !
! ! !
! !
! ! !
! !
!
!
!
! !!
! !
!! !
! !!
! ! ! !! ! !
! !! !! !!!! !!! !
!!
! ! !! !
! !!! !!!! !!!! !!! !! !! ! ! ! ! ! ! !! !
! !
! !!
! !
! ! !
! !
!! !
! ! !
! ! !!!
! !
! !!
! ! ! ! !! !! !! !!! !
!! !
! !
! !
! ! ! !
! !
! !
! !
! !
! !!
!
!
! !
!
! !! ! !!! ! !
! !
! !! ! !! !! !
! !!
!
!
! ! !
! ! !
! !
! !!
!
! !! ! ! !
! ! !! ! ! ! !
! !
!
! !
!! !
!
!!
!!
! ! ! ! !! ! !
! ! !! ! ! !
! !! !! !! ! ! !
!! ! !
!!!
! !
!!! ! ! ! !
! !! !
!! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !
! !
!!!! !!
! !
!
!
!! !
! !
! !
! !
!
!
!! !
! ! ! !! ! ! ! !
!! !
! !! ! !
! !
!
!
! !! ! ! ! ! !
! ! !
! !
!
!
!
!!
!
! !
! !! !
! !!
! ! !
!
! !
! !
! !
! ! ! ! ! !!
!
!
!
! !! !
!
! !
! !
! ! !!! !!
! !
! ! !
! ! ! ! ! ! !!
!
! !! ! !
! !!! ! ! !
!!
!!
! ! !
!
! !
! !
! !
! ! !
!
! !! ! ! ! ! !
! ! !! !
! !
! !! ! ! !
!! ! !
!
!
! !
! !
! !!!! !
! !
! !
! ! ! ! !! !! !
!
! !!!
!
! !! ! ! !
! !
!! !
! !! ! ! ! ! !
! !
! !
!
!
!
!
!
! !
! !
! !
!
!
!
! !! !
! !
! !
! !
!
! !
! !! !!
! ! ! ! ! !! ! ! ! ! !
! !
! !
!
!
!
!! ! ! ! ! ! !
!
! !!
! !
! !
!!
!
!
! !
!!
! !
!!
!! !
!
!
!
!
! !
! !
!
!
!
!
! !
! !
! !
!
!
! !
!!
! ! !!
!
!
!
! !!
!
!
! !
!
!
! !
! !
!! !
!
! !
! !
!!! ! ! !!
! !
!
!
!
!
!
!
!
! !
!
! !
!
! !
!
!
!
!
! !
!
! !
!
!
! ! !!
!!! !!
! !
! !
! !
!
!
!
!
!
! !
!
!
! !
! ! ! ! !!
!
!
!
!
!
! !
!
! !
!
!
!
!! !!!
!
! ! !! ! !
! !
!
!
! !
! !! !!
!!
!
! !
!
!
!
!
!
!
! !
!
!
! !
!
!
!! !
!
! !
! !! !!
! !
!
!!
!
! !
!
!
!
!
!
! !
!
! !!
! ! !
!
!
!
!! !
!
! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! ! !!
!
! !
!
! !
!
! !
!! !
!
!
!
!
!
!
!
!! !!
!
!
!!
!
! !
! !!
!
!
!
!
!
!
!
!
! !
!! !
!
!
!
!
!
!
!
!
!
! !! !!
!
! !
!
!!
!
!
!
!
!
!
!
! !! !
!
!
! !
!
!
!
! !
!
!
! !
!
!
!
!
!
!
! ! !!
!
!
! !
! !
!
!
!
!
!
!
!
! !
!
!
!
! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !
!
!
!
!
!
!
!
!
!
!
!
!
!
! !
!
!
! !
! !
!
!
!
!
! !
!
! !
!
!
!
!
!
!
!
!
!
!
!
!
! !
!
! !
!
!
!
!
!
!
!
!
!
!
!
!
!
! !
!
!
!
!
!
!
!
!
! !
!
!
!
!
!
!
!
! !
!
!
!
!!
!
!
!
! !
!
!
!
!
!
! !
! !
!
!
!
!
!
! !
!
!
!
! !
!
!
!
! !
! !
!
!
!
!
!
! !
!
! !
!
! !
!
!
!
!
!
! !
!
!
!
!
! !
!
!
!
!
!
! !
!
!
!
!
!
!
!
! !
!
!
!
!
! !
!
!
!
!
!
!
!
! !
!
!
!
!
!
!
!
!
!
!
!
! !
!
!
!
!
!
!
!
!
!
!
!
!
!
! !
!
!
!
!
!
!
!
! !
!
! !
!
! !
!
!
!
!
! !
!
!
!
!
!
!
!
! !
!
!
! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !
!
!
!
! !
!
!
!
!
!
!
! !
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
Q[2→1] (τ )
Q[4→2→1] (τ )
1
0.5
0
0
confidence band
0
12
?
!
.
!
?
!
.!
?
? !
24
0.5
!
?!
?
!
?
?
!
? !
!
! .
?
!
?
!
? ? !
!
!
!
.
!
?
.
?
??
!
.
?!
! !
!
!
.!
?!
.!
.!
? ?
!
?
?
!
?
!
?!
!
.
!
?
!
.
!
?
!
?
?
!
?
!
?
!
!?
? !
?
!
. !
.
!
. !
!
.
!
?
!
!
.
?
!
?
!
?
!
!
!
?
?
?
!
?
!
.
!
!
?
?
!
?!
!
?
?
!
?!
!
.
?
!
?
!
!
?
?
!
?!
!
?
?
?
!
?
!!
?
!
?
!
?!
?
!
?
?!
!
?
!
?!
?
!
?
!
?
?
!
?!
!
? !
?!
!
?!
?!
? !
?
?
? !
!
?
!
?!
!
? !
?
?!
!
?
!
?
?
?
!
?
? !
!
?!
!
?
?!
!
?
?!
!
?
!
?
?
?!
!
!
?
?
?!
!
?
!
?!
!
?
!
?
!
?
!
?
!
?
!
?
!
?
!
!
.
?!
!
?
?!
!
.
!
?
!
?
!
.
?
!
?!
?
? !
?!
!
!
?
?
!
.
!
?
!
.
!
.
!
?
!
.
!
? !
!
?
!
.
?!
!
?
?
!
?
!
?
!
?
!
?
!
.
!
?!
?
!
? !
!
!
?
? !
?!
!
?
!
.
?
? !
?
!
?
!
?
!
?
!
. !
!
?
.
?
!
.!
!
?!
!
?
?
!
?
?
?!
!
?!
.
!
. !
!
.
!
.
36
0
12
24
36
0
12
24
36
48
40
48
!
.
?
!
? !
!
?!
?!
? !
!
?!
?
!
?
!
?
!?
?
60
48 60
τ [hr]
60
!
.
72
1
confidence band
84
96
72
84
96
72
84
!
.
!
.
.
. !
!
. !
?
!
?!
!
.
!
.
!
.
Figure 2.8: Predicted performances and mean recovery times for the power infrastructure
Table 2.1 presents the statistics of the resilience metrics derived from the recovery curves for the two
regions of interest using Eqs. (9)-(10). For Clatsop County, when we consider the dependencies of G[1]
on G[4] , ρ Q[4→1→2] (τ ) = 27.22 hours, compared to ρ Q[1→2] (τ ) = 21.72 hours while neglecting such
dependencies (i.e., 25% delay.)
Table 2.1: Estimates of resilience metrics
Resilience metric
Interdependencies
Clatsop County
Whole Network
[4 → 1 → 2]
27.22
7.83
[1 → 2]
21.72
5.49
[4 → 1 → 2]
26.21
17.62
[1 → 2]
20.51
12.58
ρ[hr]
χ[hr]
Table 2.1 shows that the difference in impact on the power infrastructure, where Clatsop County experiences a larger impact. In the interest of policy and decision making, the results uncover the following: 1)
regulatory limits on the resilience metrics can help the decision-makers conclude if the delay is acceptable,
or there should be changes to reduce the impact of dependencies (e.g., employing air support in the current
case study); 2) the two regions of interest highlight the need to set the regulatory limits on the resilience
metrics while also considering the size of the region of interest.
2.8
Conclusions
This chapter presented a novel classification for infrastructure interdependencies that is consistent with
their mathematical modeling. The proposed classification partitions the space of interdependencies based
on their ontological and epistemological dimensions, thereby better enabling us to understand and mathematically model several classes of infrastructure interdependencies. Under the dimension of ontology, infrastructure interdependencies are classified into chronic and episodic. Under the dimension of epistemology,
infrastructure interdependencies are classified consistently parallel to the mathematical models required to
describe them in mimicking the reality. The chapter then presented a mathematical formulation to model
the power infrastructure and its interdependencies. The proposed formulation is then explained through
an example of a large-scale problem for the post-disaster recovery modeling of power infrastructure with
recovery dependencies on the transportation infrastructure in north west of Oregon. The example modeled
the power infrastructure covering parts of four US states for an accurate power flow analysis. The obtained
results indicated that the post-disaster recovery of the power infrastructure is significantly affected by the
41
dependencies on the transportation infrastructure. We also observe that the impact on the power infrastructure is localized in the coastal regions and different sizes of the region of interest produce vastly different
metrics for initial impact and resilience; which reinforces the need for the consideration of 1) conscious
decision making, 2) informed policy, and 3) distributive justice.
42
Chapter 3
Mathematical modeling of
interdependent infrastructure: An
object-oriented approach for
generalized network-system analysis
3.1
Introduction
Infrastructure functionality is cardinal to modern society’s economic prosperity and well-being (Ouyang
2014; Gardoni and Murphy 2018). Infrastructure are capital-intensive assets (Kane and Tomer 2019), which
often face natural and anthropogenic hazards (Gardoni and LaFave 2016). Furthermore, the interdependencies among the infrastructure may cause disruptions to propagate within and across infrastructure, leading to
widespread impact and catastrophic consequences (Zimmerman 2001; Zhang and Peeta 2011; Guidotti et al.
2019; Sharma et al. 2020a). Governments worldwide have recognized the criticality of infrastructure and
have passed legislation to preserve and improve infrastructure functionality in the face of natural hazards,
strategic sabotage, and terrorism (PCCIP 1997; Council of European Union 2016). However, infrastructure
managers, administrative policymakers, and communities struggle to effectively implement such directives
due to lack of resources and decision support (FEMA 2019). Rigorously making such decisions requires defining the consequences relevant to the decision process and quantifying their probabilities (risk assessment),
as well as evaluating the quantified risks (risk evaluation) (Rowe 1980; Gardoni et al. 2016). In the context
of interdependent infrastructure and communities, such risk assessment and evaluation requires models of
critical infrastructure to capture the immediate impact of hazards and also consider the long-term impacts
and the ability of structures, infrastructure, and communities to recover (Gardoni 2019; Boakye et al. 2019;
Gardoni and Murphy 2018).
Developing a rigorous mathematical formulation to model infrastructure encounters three sets of challenges. The first set of challenges deals with identifying and understanding the different types of interactions
within and across the infrastructure. There are several explorations and classifications of interdependencies
available in the literature (e.g., Rinaldi et al. 2001; Zimmerman 2001; Dudenhoeffer et al. 2006; Lee II et al.
2007; Zhang and Peeta 2011). However, these lacked a classification consistent with the formulation of
43
mathematical models needed to account for the various classes of interdependencies. Sharma et al. (2020a)
developed the first orthogonal classification of infrastructure interdependencies that enables their systematic
treatment for mathematical modeling.
The second set of challenges relates to modeling the time-varying performance of each infrastructure.
Performance analysis is a process of modeling infrastructure operations to calculate the reliability and functionality associated with any given state of the infrastructure. Performance analysis of infrastructure has
three significant challenges, 1) information on privately owned infrastructure is difficult to obtain, 2) infrastructure typically have large geographic footprints and complexity, which require information and subsequent
modeling of regions different (potentially significantly larger) than the region of immediate interest, 3) infrastructure have non-linear failure mechanisms pertaining to the physics governing the flow of resources through
them, causing cascading failures (e.g., voltage collapse, dynamic instability in power infrastructure, traffic
jams in transportation infrastructure, and low pressure in potable water infrastructure). Data availability
affects different infrastructure analyses to varying extents. For example, Transportation infrastructure data
is typically easy to obtain due to public ownership. However, water infrastructure and power infrastructure
data are typically privately owned. Past studies have used methodologies to generate synthetic but representative models using incomplete data. For example, see Birchfield et al. (2017) for power infrastructure.
The challenge of selecting boundaries for infrastructure has not been well discussed in the literature. Past
studies implicitly select the boundaries such that the footprints are identical to the region of interest (Dong
et al. 2004; Shinozuka et al. 2007). Several methods have been used for the performance analysis of infrastructure. These can be classified into flow-based models, topological models, statistical models, and hybrid
models (Papic et al., 2011; Vaiman et al., 2012; Song et al., 2015). Hazard impact studies tend to favor
simpler models such as topological connectivity and maximum flow algorithm to analyze infrastructure performance (Adachi and Ellingwood 2008; Dueñas-Osorio et al. 2007). However, to capture cascading failures
and assess infrastructure performance accurately, high fidelity flow analyses should be used (Motter and Lai
2002). Limited literature has applied high fidelity flow analyses for single infrastructure (Klise et al. 2017;
Apostolopoulou et al. 2015; Sauer and Pai 1998). However, past research has avoided complex modeling and
computation for interdependent infrastructure and has typically used topology-based methods (Lee II et al.
2007; González et al. 2016; Dueñas-Osorio et al. 2007).
Finally, the third set of challenges relates to capturing the various classes of interdependencies. Modeling
of interdependencies has two challenges 1) infrastructure interdependencies have different mechanisms, and
there are conceptual challenges in modeling such interactions, and 2) infrastructure interdependencies result
in coupling the performance analysis of infrastructure, which results in computational challenges. Most
of the current research focuses on addressing the conceptual challenges. Wassily Leontief won the Nobel
44
Prize in 1973 for the first mathematical model of interdependent economic sectors, called the input-output
model (Leontief 1986). The input-output model identified that economic sectors have interdependencies
on both demand and supply sides. The model then considered such interdependencies in terms of the
monetary value at the economic sector level using linear functions. The input-output model has since been
succeeded by the Computational General Equilibrium model that improves the modeling by including market
prices, demand variation, and considering non-linear functional relations. Infrastructure interdependencies,
however, are typically modeled at a finer resolution. Apart from the economic modeling’s extension to the
infrastructure sectors, several other approaches have been used to model infrastructure interdependencies,
such as empirical methods, agent-based modeling, and fault trees (Ouyang 2014). However, the most common
methods typically model infrastructure as networks with nodes and links representing various localized
and linear components. Each network’s failure is then captured using network connectivity measures or
a universal flow-based analysis (Crucitti et al. 2003; Johansson and Hassel 2010; Guidotti et al. 2017b).
The interdependencies are captured by incorporating the failure probability of infrastructure components,
given the supporting components’ failure. Guidotti et al. (2017b) provide a matrix-based approach to
efficiently compute component failure probabilities in interdependent infrastructure. However, all of the
current approaches suffer from several issues. Firstly, they only allow binary states for network components
and cannot model a reduction in functionality if no component failure occurs. Secondly, the dependency is
modeled across nodes as a probability of failure of one node given another node’s failure. However, other
quantities, in addition to the failure probability, can be of interest. Furthermore, interdependencies among
link-node and link-link pairs cannot be easily modeled and require pseudo nodes to represent links. Thirdly,
all the current methodologies fail to model simultaneous bilateral or looped interdependencies. Finally,
current approaches force a universal method to analyze all of the infrastructure and not allow infrastructure
specific high-fidelity analysis.
This chapter proposes a general mathematical formulation to model infrastructure using an objectoriented formulation. Specifically, we model the infrastructure as a collection of mathematical network
objects. We then characterize each network object using the general performance measures of capacity,
demand, supply and derived performance measures for reliability or functionality. We provide a glossary of
terms including network, capacity, demand, supply, performance, and interface, to clarify their meanings in
the current context. The mathematical formulation then explains how to estimate each of the measures using
the state variables (e.g., material properties, boundary conditions) of the infrastructure components. We
then provide a detailed formulation to model the interdependencies between infrastructure using interface
functions between the mathematical network objects. We then discuss how the interface functions operate
and the typical mathematical forms of such functions. We also discuss the features of the interface functions
45
that enable modeling bilateral and looped interdependencies, which have not been discussed in the literature
yet. Finally, we provide a conceptual example to illustrate the proposed formulation.
3.2
Glossary for Infrastructure Modeling
Critical infrastructure is a multi-disciplinary research topic. Areas such as engineering, economics, social
sciences, urban planning, and management all have their terminology, making scientific communication
difficult. This section provides a glossary of infrastructure terminology to clarify some standard terms’
meaning and introduces some new terms.
Boundary: The boundary is the frontier that marks the limits of the spatial extent of a model (see also
footprint).
Base measures: The measures (for example, capacity and demand) are base measures if they are
calculated using information limited to the specific infrastructure while assuming normalcy of all other
interacting infrastructure. Base measures calculations do not consider any interdependencies.
Capacity: The capacity of infrastructure is the measure of its ability to generate or transmit the specific
resources or services pertaining to the specific infrastructure’s purpose. The capacity of infrastructure is
typically distributed both spatially over its various components and temporally. Infrastructure may have
multiple capacity measures necessary to capture a variety of needs for resource/service generation and maintain operational safety.
Control system: A control system for infrastructure is a system that manages the operational behavior
of an infrastructure (Dorf and Bishop, 2011). Control systems in an infrastructure manage the portion of
capacity which is mobilized by the system at any given time.
Demand: The demand for infrastructure is the measure of its consumers’ needs in terms of the resources
and services provided by the specific infrastructure (Gardoni et al., 2003; Suganthi and Samuel, 2012).
Like capacity, demand for infrastructure may also be distributed spatially over its various components and
temporally. Infrastructure may have multiple demand measures corresponding to the various capacities.
Infrastructure failure can occur when infrastructure demand is more than its capacity (Gardoni et al. 2002;
Gardoni 2017a). When the demand for infrastructure is less than its capacity, the control system should
only mobilize a portion of its capacity.
Deterioration: Deterioration in infrastructure is a process by which its components decline in quality
over time. Deterioration may include several processes depending upon the vulnerabilities of the infrastructure. Deterioration can be continuous over time or occur suddenly due to exposure to a damaging event
(Kumar and Gardoni, 2014)
46
Footprint: Footprint is the spatial scope of a model. For the modeling of the hazard, the footprint is
the region over which the hazard needs to be modeled or propagated. For modeling of infrastructure, the
footprint is the spatial portion of the infrastructure that we need to model.
Infrastructure: Shishko and Aster (1995) defined a system as “[t]he combination of elements that
function together to produce the capability to meet a need. The elements include all hardware, software,
equipment, facilities, personnel, processes, and procedures needed for this purpose.” We adopt the same
definition also for infrastructure, as they serve the basic needs of modern society.
Interdependency: Interdependencies are the interactions among infrastructure, which influence the
state of the interacting infrastructure. Generally, there can be unilateral dependencies when one infrastructure supports another with no reciprocal support and bilateral dependencies when two infrastructure support
each other. The term interdependecies represents both unilateral and bilateral depedencies.
Interface: An interface is a collective of certain class interdependencies between infrastructure or networks. Interface functions are mathematical mappings that model an interface by modifying the base measures of individual infrastructure or networks to include the effects of interdependencies with other infrastructure. A forward interface modifies the values of specific physical quantities of the supported network
based on the values of other physical quantities from the supporting networks. Similarly, a backward interface modifies specific physical quantities of the supporting networks based on the values of other physical
quantities from the supported network.
Network: A network is defined as a set of pairwise related objects where each of those objects has
attributes other than the topology of their relations (Newman 2001). Infrastructure can be mathematically represented by multiple interdependent network objects where individual network objects have specific
capacity and demand measures, which serve a specific need in collectively attaining the purpose of the infrastructure. For example, a structural network object may serve the purpose of the physical integrity of
infrastructure, while a flow network object may serve the purpose of a general commodity exchange.
Performance: The performance of infrastructure is defined as a measure of how well the infrastructure
is fulfilling the stakeholders’ needs. Different stakeholders, such as the owners, the regulators, and the
consumers may have different requirements and infrastructure performance measures. The owners typically
prioritize profitability and efficiency. The regulators represent the collective societal interests and prioritize
measures concerning quality, reliability, environmental protection, and economic justice. The consumers
are typically concerned with the impact of the infrastructure services on their socio-economic activities,
measured in terms of functionality.
Region of interest: The area over which the results of a chosen analysis are of concern. The footprints
of the models required to run a chosen analysis over a region of interest are generally not identical to the
47
region of interest itself.
Resolution: The resolution of a model is a measure of the level of detail in which a model can represent
reality. For the hazard model, the resolutions can correspond to spatial and temporal modeling of the hazard.
For infrastructure models, the resolutions correspond to spatial, temporal, and hierarchical modeling of the
infrastructure.
State variables: State variables are the variables that describe the dynamic state of infrastructure. State
variables represent physical quantities specific to the individual network objects for specific infrastructure,
such as material properties and geometry for structural components, and voltage and frequency for electrical
components. The state variables that can be modified using the infrastructure control system are called the
control state variables (e.g., voltage and active power at the generators in power infrastructure). Capacity and
demand measures of infrastructure are functions of the state variables and other parameters with uncertainty
associated with them. Life-cycle processes such as deterioration and recovery affect the state variables, and,
through the state variables, the quantities and measures derived from them (Jia and Gardoni 2018; Guidotti
et al. 2016).
Supply: Supply is the portion of the capacity that is mobilized by an infrastructure to meet an imposed
demand. The supply for a particular capacity and demand is not unique and depends on the control state
variables. Different infrastructure may present different challenges to control supply. Control challenges
may arise from infeasibility, inefficiency, cost, computation issues, legality, and ethics (Housner et al. 1997;
Kundur et al. 1994). Supply (along with capacity and demand) is needed to measure the infrastructure
performance in terms of derived measures such as efficiency, reliability, and functionality.
Tolerance: Tolerance of infrastructure is its ability to avoid the deterioration of its components (sustain
its capacity) and be functional while serving in an unbalanced demand-supply condition. An unbalanced/lowquality supply in the case of an intolerant system may increase the rate of deterioration of the infrastructure
components
Tributary area: A tributary area is the portion of the region of interest served by an individual
component from a network. The size of the tributary areas decreases with the increase in the spatial
resolution of the network model. In the case of multiple networks serving the region of interest, the sets of
tributary areas define different partitions of the region of interest. The intersections of the tributary areas
defined by multiple partitions result in an even smaller spatial unit, defined as “cell.” A cell is the portion
of the region of interest, served by a unique set of components from all the infrastructure.
48
3.3
Hyperparameters for infrastructure characterization
Before one can apply a modeling formulation on the infrastructure for a region of interest, several overarching decisions are to be made. The guiding principle behind making these decisions is to get useful
insight while maintaining computational feasibility. Mathematically this can be understood as a selection
of hyperparameters for the modeling of infrastructure. We identify the selection of boundaries, spatial and
hierarchical resolution of the infrastructure characterization, and the performance assessment’s temporal
resolution as the hyperparameters of infrastructure modeling.
The spatial resolution of a network corresponds to the level of details in the topology. The level of
detail defines the tributary areas, which are the partitions of the region of interest served by individual
infrastructure elements. The size of the tributary areas decreases with the increase in the level of detail.
In the limiting case, the tributary areas correspond to each individual customer. The temporal resolution
of the network corresponds to how often we assess its performance. The hierarchical resolution defines to
what level of detail we model the function of each network component (e.g., a power plant can be modeled
as single node or multiple generators modeled individually). The spatial resolution is selected based on the
availability of data, choice of performance assessment, variability of hazard impact over the region as well
as the computational cost (Sharma and Gardoni 2020). The temporal resolution is selected based on the
temporal scale of variation in the network capacities, demands, and supplies following a hazardous event
(discussed in Section 3.2), the modeling of the deterioration and recovery (Guidotti et al. 2019), and the
computational cost. The hierarchical resolution is selected based on the same factors as the spatial resolution,
with one addition that a high hierarchical resolution is required to capture any available redundancies.
3.3.1
Boundary selection and modeling
The region of interest’s footprint is typically different from the footprint of the infrastructure serving the
region. Furthermore, during disaster events, the affected region may also extend outside the immediate region
of interest. Ascertaining the boundaries for each of the infrastructure models and defining the conditions
at curtailed boundaries is an essential part of infrastructure modeling. The challenge of boundary selection
has not been well discussed in the literature. Past studies implicitly define the boundaries in the following
two ways: 1) Identical to the boundary of the region of interest (Dong et al. 2004; Shinozuka et al. 2007;
Unnikrishnan and van de Lindt 2016), or 2) Identical to the actual physical boundary of the infrastructure
(Guidotti et al. 2016). We identify the following factors for the selection of the boundary of an infrastructure
model: 1) the footprint of the region of interest, 2) the footprint of the hazard model, 3) the boundaries
of the operation and control, 4) the availability of data, 5) the type of performance analysis, 6) location of
49
strategic components, and 7) the infrastructure interdependencies.
The region of interest should always be part of the modeled infrastructure. The hazard impact’s footprint
decides which components of the infrastructure may suffer damage. It thus dictates the modeling of those
components if their damage may affect infrastructure functionality in the region of interest. Also, the
hazard model’s footprint must be at least as big as the most extensive network, and it has to include the
source(s) of the hazard. The boundaries of operation and control, such as balancing authorities in the power
infrastructure and pressure zones in the water infrastructure, provide us with convenient boundaries for the
models. The availability of data is paramount in defining what portions we can or cannot model. The type
of performance analysis dictates the modeling of components, which may be necessary to solve the equations
governing the flow of resources. Strategic components such as generators in power infrastructure or tanks
and reservoirs in water infrastructure may extend the boundaries beyond the immediate region of interest.
Interdependencies also dictate what portions of the infrastructure need to be modeled to capture all relevant
interaction among infrastructure components.
3.3.2
Spatial resolution
Spatial resolution is the level of detail in the topology of the infrastructure. A higher spatial resolution
means we have a higher number of elements in the infrastructure model. The number of elements modeled defines the corresponding tributary areas, which are the partitions of the region of interest served by
individual infrastructure elements. The size of the tributary areas decreases with the increase in spatial
resolution. In the limiting case, the tributary areas correspond to each customer. We identify the following
factors for the selection of spatial resolution of an infrastructure model: 1) the availability of data, 2) the
type of performance analysis, 3) variability in the hazard impact, 3) infrastructure interdependence, and 4)
the computational cost.
The availability of data provides an upper limit on the spatial resolution. The type of performance
analysis requires modeling specific components. For example, in water infrastructure, modeling the pumps
is necessary to run a hydraulic flow analysis. The variability of the hazard impact also affects the required
resolution of the infrastructure model. If hazard values are available at high resolution, we can gain insight
from getting damage values at a higher resolution. However, if the hazard impact across the whole region
is uniform, only calculating damages for a lower resolution infrastructure model may suffice. Similar to the
selection of boundaries, infrastructure interdependencies may require us to increase the spatial resolution
to capture all component interactions. Finally, the model’s computation cost typically increases with an
increase in spatial resolution. So an infeasible computational cost may serve as an incentive to decrease the
50
spatial resolution.
3.3.3
Temporal resolution
The performance analysis of infrastructure is typically done at discrete time steps. The temporal resolution defines the frequency of the performance assessment for each of the infrastructure. The temporal
resolution is selected based on 1) the temporal scale of variation in the infrastructure state, 2) the modeling
of the deterioration and recovery (Guidotti et al. 2019), 3) the type of solution approach for the performance
analysis, and 4) the computational cost.
The purpose of time-varying performance analysis of infrastructure is to understand the network state’s
evolution due to the causes driving such change. If we expect the rate of state change to be high, we need a
higher temporal resolution (i.e., lower time step). However, a lower rate of change would mean that a lower
temporal resolution may suffice to understand the overall trend. The models for infrastructure deterioration
and recovery are the two that provide information about the rate of change in the network state. Typically,
the rate of change due to continuous deterioration is low compared to the changes due to recovery actions.
So, the temporal resolutions for modeling the infrastructure’s deterioration process may be lower, while the
temporal resolution may be higher for modeling recovery. However, the effects of the solution approach for
performance analysis and the computational cost are more nuanced.
One may think that a lower temporal resolution may have a lower computational cost, and a higher
resolution would always have a higher cost, but that is not necessary. The monotony of the relation is not
valid because performance analysis typically requires solving a system of non-linear equations. The solution
approach for solving such a system of equations is that we start from an initial guess and improve it by
multiple iterations to reach a predetermined precision. For time-varying performance analysis, a time step’s
final solution serves as the initial guess for the next time step. Thus, the higher the temporal resolution, the
difference between the initial guess and the final solution decreases, which means that our solution algorithm
may converge faster. Thus, one can choose a temporal resolution by running some initial experiments and
finding out what resolutions provide the best efficiency.
3.3.4
Hierarchical resolution
The hierarchical resolution defines to what level of detail we model the function of each network component (e.g., a power plant can be modeled as a single node or multiple generators modeled individually). The
hierarchical resolution is selected based on the same factors as the spatial resolution, with one addition, a
high hierarchical resolution is required to capture any available redundancies. Another difference between
51
the spatial and the hierarchical resolution is that a hierarchical resolution typically does not affect the number of tributary areas. However, the accuracy of specific performance analysis methods such as a system
reliability problem, is highly affected by hierarchical resolution selection.
3.4
An object-oriented representation of infrastructure
As discussed in section 3.1, two major concerns in a mathematical representation of infrastructure are
1) the mathematical formulation should allow for the inclusion of various underlying models for different
types of infrastructure (e.g., water supply, power supply and transportation), and 2) maintain consistency in
modeling interfaces for efficient integration of multiple types of analysis. A graph-theory based representation
is natural to represent an infrastructure object mathematically (Guidotti et al. 2017b). Graph theory is a
field of mathematics that deals with the study of graphs, which are defined as mathematical structures
or diagrams amounting from several pairwise related objects. The objects that make the graph are called
vertices (points or nodes), and the relation between a pair of nodes is called an edge (arc, line, or link.)
Together the vertices and edges are the elements of the graph. Mathematically a graph can be written as
G = (V, E), where V is the set of nodes and E is the set of links (Newman 2001). A network is a graph in
which the nodes and links have attributes in addition to their topological identities (e.g., names, hierarchy,
function, and type.) We propose that infrastructure can be represented as a collection of interdependent
network objects. Each network object has its state variables as primary attributes and possesses specific
capacities to serve respective infrastructure demands.
3.4.1
Capacity and demand for a network object
The topology of any directed graph with |V | number of nodes can be represented as a |V | × |V | node
adjacency matrix, A, where Ai,j = 1{(i,j)∈E} is the called the node adjacency matrix (Watts and Strogatz
1998; Guidotti et al. 2016) , and 1{·} is an indicator function which takes the value 1 when the underlying
2
Boolean is True and 0 otherwise. It follows that we need at most |V | place holders to represent any attributes
for the components of a network object with a topology graph G = (V, E). We chose a tensor to represent
any physical quantity for the network components, such that the first two indices (i, j), i = j would refer to
a nodal component and (i, j), i 6= j, would refer to a link component.
We then write an ordered set of state variables of a typical component with index (i, j) as the vector
xi,j . Thus, we can record the state of a network object at any time τ by recording the state variables of all
the individual components in a |V | × |V | max∀(i,j) (|xi,j |) third order tensor x(τ ). Figure 3.1(a) shows an
example network and it’s corresponding tensor of state variables x. In Figure 3.1(b), the solid colored blocks
52
represent the state variables for the respective components whereas the transparent blocks correspond to the
non-existent links.
x1,1
2
x2,1 x2,2
x=
1
x3,1 x3,2 x3,3
3
(a) An example network
(b) State variables
Figure 3.1: Mathematical representation of the topology and state of a network
Using the state variables x(τ ), we write the base capacity of a network as
C (τ ) = C [x(τ ), ΘC ]
(3.1)
where C [·] is a second order tensor field, i.e. a second order tensor of functions where each element is a
capacity model such as the one introduced in Gardoni et al. (2002) and ΘC is a third order tensor containing
the parameters for the respective capacity models. In the case of a flow network, element C (τ ) represents
the generation capacity at a node (i, i), and Ci,j (τ ) , i 6= j represents the transmission capacity of a link
(i, j).
Similarly, we write the base demand for the individual components as a tensor field of demand models,
D (τ ) = D [x(τ ), IM (τ ) , ΘD ]
(3.2)
where IM(τ ) is the third-order tensor where the mode−3 fibers are the intensity measures for each of the
component demand models (Gardoni et al. 2003) in D [·], and ΘD contains the parameters for the respective
demand models. Note that the demand does not have to be populated for all the existing elements of the
network. For example, in a water flow network, the demand can be defined on the nodes alone. For a
network serving multiple distinguishable flows, such as a traffic flow network, the demand is available in the
form of an origin-destination table.
Figure 3.2 shows the capacity and demand tensors for the example shown in Figure 3.1. Figure 3.2(b)
shows a special case where the demand is explicitly defined at the nodes alone (typical of power or water flow
networks). The capacity and demand estimates for the individual components depend on the elementwise
application of the respective models.
53
x1,1
C1,1
C2,1
C2,2
x2,1
=C
ΘC,1,1
x2,2
ΘC,2,1 ΘC,2,2
,
C3,1
C3,2
x3,1
C3,3
x3,2
x3,3
ΘC,3,1 ΘC,3,2 ΘC,3,3
(a) Capacity tensor field
x1,1
D1,1
D2,2
=D
x2,1
IM1,1
x2,2
ΘD,1,1
IM2,2
ΘD,2,2
,
D3,3
x3,1
x3,2
x3,3
,
IM3,3
ΘD,3,3
(b) Demand tensor field
Figure 3.2: The capacities and demands for network components
3.4.2
Supply and control for a network object
The supply tensor field, S [·], records the portion of the capacities that are mobilized by each of the network
components at any given time to serve the imposed demand. For example, for a structural component, the
supply would be the minimum of its capacity and demand. However, in the case of a flow network, supply is
the portion of the generation capacity that is mobilized from the nodes and the portion of the transmission
capacity that is mobilized on each of the links. In general, S (τ ) for a network is not unique given a unique
C (τ ) and D (τ ). The multiple possibilities of supply may exist due to multiple equilibrium points or due to
potential control choices. Control systems can be used to manage the behavior of any of the components of
a network object, thus potentially affecting the supply of the entire network. The state variables that can be
managed by control systems are the the control state variables. We represent the control state variables as
x:,:,∀c∈κ (τ ), where κ is the index set of the control state variable types such that x:,:,c (τ ) is the cth frontal
slice of the tensor x. Supply at a given time τ can then be written as a function of C (τ ), D (τ ), x (τ ), and
the supply parameters ΘS
S (τ ) = S [x(τ ), C (τ ) , D (τ ) , ΘS ]
(3.3)
Solving for the relevant state variables and S(τ ) is, in general, an optimization problem that reduces to
an equilibrium problem for some chosen values of the control state variables. We further discuss the solution
54
for supply in Section 3.4.4. Note that realizing the values of x(τ ), C(τ ), D(τ ) and S(τ ), we can truly capture
the state of the network at a given time τ .
Figure 3.3 shows the structure of the tensors involved in the Eq. 3.3, for solving the supply for the
example network in Figure 3.1. The highlighted elements show the dependence for calculating the individual
elements of the supply. The supply at each component is dependent on the entire network, specifically the
control state variables, capacities and demands.
x:,:,c , ∀c ∈ κ
x1,1
S1,1
S2,1
S2,2
=S
x2,1
C1,1
x2,2
C2,1
C2,2
C3,1
C3,2
,
S3,1
S3,2
S3,3
x3,1
x3,2
,
x3,3
D1,1
C3,3
ΘS,1,1
D2,2
ΘS,2,1 ΘS,2,2
,
D3,3
ΘS,3,1 ΘS,3,2 ΘS,3,3
Figure 3.3: The system of equations for supply
3.4.3
Performance for network components
Once the state of the network is known, the next step is to assess how well the network is fulfilling the
stakeholders’ needs. Different stakeholders, such as owners, regulators, and consumers, may have different
priorities and thus have different measures of the network’s performance. We can write a general performance
measure at time τ at any of the components of interest in the form of a second-order tensor field
Q (τ ) = Q [C (τ ) , D (τ ) , S(τ )]
(3.4)
For example, the component reliabilities, R (τ ) of a structural network is a performance measure which
we can write as a function of C(τ ) and D(τ ), such that . In the case of a flow network, there can be several
performance measures of interest. The capacity utilization factor of the generation nodes is an important
performance measure for owners, which we can write as [S(τ )
C (τ )] 1{Ci,j (τ )0,i=j} , where
and
denote
respectively the elementwise division and multiplication. Similarly, we can write the ratio of the nodal
demand served, which is of interest for the regulators and customers as [S(τ )
55
D (τ )]
1{Di,j (τ )0,i=j} .
We can also write the loading ratio for the links as the ratio of supply to capacity as [S(τ )
C (τ )]
1{Ci,j (τ )0,i6=j} , which is an important measure for operational safety.
Figure 4 shows the nodal demand served, [S(τ )
D (τ )]
1{Di,j (τ )0,i=j} for the example network. Once
the network’s state is known in terms of the capacity, demand, and supply, a performance measure can be
precisely defined to extract the required information about the components.
S1,1/D1,1
Q(τ ) = [S(τ )
D(τ )]
1{Di,j (τ )>0,i=j} =
S2,2/D2,2
S3,3/D3,3
Figure 3.4: The nodal demand served for the example network components
3.4.4
Optimizing the supply for a network object
In general, a system generates a time-varying supply to meet a time-varying demand. Managing the
supply from a system is generally not trivial, and some form of automatic or manual control may be required
to achieve the desired supply. As introduced in section 3.4.2, deciding the values for the control state variables
x:,:,∀c∈κ (τ ) and solving for supply S (τ ) is an optimization problem.
The objective(s) for the supply optimization can generally be to minimize loss function(s) ` [·] over
some set of network performance measures Qm (τ ) , m ∈ {1, 2, ...}. The constraints to the problem are the
traditional capacity constraints for flow network, and the set of equations that govern the supply (Eq. 3.3).
Mathematically, we can write
minimize
l [{Qm (τ ) ; wm (τ ) , m ∈ {1, 2, . . .}}] ,
subject to S (τ ) C (τ ) ,
(3.5)
S (τ ) = S [x(τ ), C (τ ) , D (τ ) , ΘS ]
where ` [·] is the loss function defined for the chosen set of performances {Qm (τ ) ; wm (τ ) , m ∈ {1, 2, . . .}},
in which wm (τ ) is a weight vector that captures the relative importance of different components for the
specific performance measure Qm (τ ); S (τ ) C (τ ) are the traditional capacity constraints for flow networks,
and S (τ ) = S [x(τ ), C (τ ) , D (τ ) , ΘS ] are the supply equations. The supply constraints are the ones that
bring into consideration the unique characteristics of the network. The power balance equations for the
power flow network (Glover et al. 2012) are the examples of supply equations in a power flow network, and
the Darcy–Weisbach equations (Bressan et al. 2014) are the examples of supply equations in the water supply
network.
56
3.5
Aggregated performance measures
The component-level performance Q (τ ) for the network is useful but may not provide directly interpretable information to the stakeholders. Monetary measures such as revenue, costs, and profit are an
option that may work for owners alone, but these are not suitable for all stakeholders. Thus, there is a need
for performance measures that may provide real-valued indicators to represent the network’s aggregated
performance. There are two major approaches that we use to measure aggregated network performances,
1) we can measure the aggregated performance based on the statistics of the individual component level
performances or, 2) the aggregated performance can be explicitly defined at the network level.
3.5.1
Statistical measures of aggregated performance
The statistical aggregated performance measures aim towards extracting specific information from the
performance distributions at the component level. Say, we define a component level performance field Q(τ ) on
the set of components {(i, j)}. If the component performances at a time τ , are the samples Q(i,j) (τ ) from
a Cumulative Distribution Function(CDF) FQ(τ ) (q), and we have a benchmark distribution FQ∗ (q), we can
measure the aggregated network performance by comparing the two distributions using a measure of disparity.
One way to quantify the performance disparity is to use a statistical distance , d FQ(τ ) (q) , FQ∗ (q) . The
choice of the distance would depend on the specific information of interest, for example, if the distributions’
central or tail parts are of more interest. Several types of distance definitions are available in literature for
this purpose. For example for the case where Q (τ ) is continuous, the Jenson–Shannon divergence (Lin 1991)
is a statistical divergence written as
+∞
JSD fQ(τ ) (q) kf
Q∗
(q) =
−∞
fQ(τ ) (q)
dq +
fQ(τ ) (q)
f¯Q(τ ) (q)
+∞
−∞
fQ∗ (q)
fQ∗ (q)
dq
f¯Q(τ ) (q)
(3.6)
where fQ(τ ) (q) and fQ∗ (q) are the probability density functions of the measured and the bench mark
performance respectively, and f¯Q(τ ) = (fQ(τ ) (q)+fQ∗ (q))/2.
Alternative to the use of a statistical distance, we also propose to use a Disparate impacts curve to
perform a more detailed analysis of the performance disparity. A disparate impact curve is based on a
statistical method known as the Quanitle treatment effects (QTE)(Doksum 1974; Lehmann and D’Abrera
1975; Chernozhukov and Hansen 2005), which plots the difference between the inverse of the two CDFs,
−1
F Q(τ ) (u) − F −1 Q∗ (u) with respect to their quantiles u. Disparate impact curves can be used for both
continuous and discrete valued Q (τ ). Note that a statistical distance measure only provides a single value of
disparity. However, a quantile based curve gives us more information in terms of changes at each quantile of
57
the performance distribution. Figure 3.5 shows an example of performance distributions and a corresponding
−1
−1
FQ(τ
) (u) − FQ∗ (u)
i
disparate impacts curve.
−0.10
−0.20
−0.30
h
fQ (q)
fQ∗ (q)
fQ(τ ) (q)
0
0.5
q
0
1
(a) Recorded and benchmark performances
0.5
Quantile,u
1
(b) Disparate impact curve
Figure 3.5: Disparate impact curve for network performances
In case the parameters of a benchmark performance distribution are not available. We can check for
whether the components’ performances can be statistically obtained from the same distribution. For example,
we can assume a functional form for the samples’ performance distribution and detect anomalous samples
using an outlier detection test. Detecting outliers with lower performance values is common for fault detection
(Worden et al. 2000). The ratio of detected outliers and the total number of components in the left tail of
the performance distribution can then be used as an aggregated performance measure. More generally, we
can always use descriptive statistics of the performance distribution as an aggregated performance measure,
see for example the global diameter and eccentricity measures for connectivity based networks proposed by
Guidotti et al. (2017b).
3.5.2
Explicit measures of aggregated performance
In contrast to statistical measures, we can define an aggregated network explicitly on the network’s
overall state. A system reliability problem based on the state of multiple network components would be an
explicit measure of aggregated performance. For example, the probability of a set of components satisfying
a certain threshold for the ratio of nodal demand served. A more rigorous example is the Reliability-based
Capability Approach (RCA) developed by Tabandeh et al. (2018a). RCA quantifies the broad societal impact
of hazards in terms of changes in dimensions of individuals’ well-being, called capabilities. Mathematically,
Tabandeh et al. (2018b) model the well-being of individuals as a system of interconnected indicators (which
can be based on infrastructure performance). Tabandeh et al. (2018b) write the probability that the state
of well-being St at time t is in the domain of interest Ω (e.g., an intolerable state) as
58
P [St (Θ) ∈ Ω] =
!
P
[ \
{Il (zt , Θ) ∈ Ωl } |zt
dF (zt )
(3.7)
m l∈Cm
where Il (zt , Θ) is the predicted value/category of the lth indicator; Cm ⊆ {1, . . . , L} is a cut-set, defined
such that the joint occurrence of the events {Il (zt , Θ) ∈ Ωl : l ∈ Cm } results in the occurrence of the event
S
{St (Θ) ∈ Ω} (Ditlevsen and Madsen 1996); the union operator
captures the occurrence of any such cutsets; zt is the vector of all regressors; F (zt ) is the joint CDF of zt ; and Θ = (Θ1 , . . . , ΘL ) is the vector of
all model parameters.
3.6
Interdependencies and network interfaces
As explained in Section 3.4, we represent infrastructure in the form of multiple interdependent layers of
network objects. Each network has distinct capacities to serve the respective demands of the infrastructure.
Section 3.4 provided the details of the mathematical representation of one such object. This section goes
into the mathematical modeling of the interdependencies of the various such network objects.
A network object has two types of interfaces, either with the supporting networks or supported networks.
Mathematically, we model the operational interdependencies among any set of networks by considering two
effects 1) the effect on the capacity of a supported network(s) due to some performances of the supporting
networks, and 2) the effect on the demand for the supporting network(s) due to some different performances
of the supported networks.
3.6.1
Modeling the effects of supporting and supported interfaces
If a network depends on a supporting network for a service or product, the network’s components’
capacities are conditional upon the supporting service or product’s availability. If superscript [k] indicates
any quantity of interest for network object indexed k, such that the interdependent network-system can be
written as G = G[k] = V [k] , E [k] : k = 1, 2, . . . , K . The base capacity tensor field, C[k] (τ ), of a network
k assumes a particular performance from the supporting networks. Hence we can modify C[k] (τ ) to account
for any change in supporting network performances. We write the available capacities for network layer k in
the form of a modified capacity tensor field C0[k] (τ ) as
[k]
C0[k] (τ ) = C[k] (τ ) MC (τ )
(3.8)
[k]
where MC (τ ) is the modifying tensor field of interface functions, which evaluate as the element wise
multiplicative correction factors for the components’ capacities. The arguments of the capacity side interface
59
[k]
functions, MC (τ ), are the performances of the supporting networks. If subscript α indicates quantities
with supported interface (forward) interactions and the subscript β indicates supporting interface (backward)
[k]
interactions, any element, MC,(i,j) (τ ), (capacity side interface function,) can be written as
[k]
[k]
MC,(i,j) (τ ) = MC,(i,j)
n
o
[l ]
Qαβ : G[lβ ] ∈ πC G[k]
(3.9)
n
o
[l ]
where Qαβ : G[lβ ] ∈ πC G[k] is the set of relevant supported interface (forward) performances of the
[k]
supporting (capacity side parent) network objects,πC G[k] . Note that a single element of MC (τ ) can be
dependent on the performances of multiple components in the supporting layers.
We argue that dependence among two networks is, in general, bi-directional. If a supporting network
provides a service or product to a supported network, the supported network consequently accounts for a
portion of the demand from the supporting network. Similar to a base capacity estimation, a base demand
estimation assumes some functionality (a performance) in the customers it supports. Hence, similar to the
capacity, we need to modify the demand D[k] (τ ) to account for any changes in the performances of the
supported networks. We write the available demand for network layer k in the form of a modified demand
tensor field D0[k] (τ ) as
[k]
D0[k] (τ ) = D[k] (τ ) MD (τ )
(3.10)
[k]
where MD (τ ) is the modifying tensor field of multiplicative correction factors for the base demands.
[k]
An element MD,(i,j) (τ ) can be written as
[k]
[k]
MD,(i,j) (τ ) = MD,(i,j)
n
o
[l ]
Qβα : G[lα ] ∈ πD G[k]
(3.11)
n
o
[l ]
Qβα : G[lα ] ∈ πD G[k]
is the set of relevant supporting interface (backward) performances of
the supported (demand side parent) network objects,πD G[k]
where
Figure 3.6 shows a small example of interdependent networks. Network layer 1 in Figure 3.6(a) has network layer 0 and network layer 2 as supporting and supported networks respectively. The dashed lines show
the individual dependence for the components. Figure 3.6(b) present the available capacity and demands
for the network layer 1 considering the dependence on the supporting and the supported networks.
60
2
1
1
2
3
[0]
2
3
4
1
[1]
[2]
(a) An example of interdependent networks
0[1]
[1]
C1,1
C1,1
C2,1
0[1]
C2,2
0[1]
C3,2
C3,1
0[1]
0[1]
=
0[1]
C3,3
C2,1
[1]
C2,2
[1]
C3,2
C3,1
0[1]
1
[1]
[1]
[1]
0[1]
=
0[1]
D3,3
1
1
[1]
[1]
[1]
[0]
MC,3,3 (Qα,2,2 )
[2]
MD,1,1 (Qβ,3,3 )
D1,1
D2,2
1
C3,3
[1]
D1,1
[0]
MC,2,1 (Qα,1,1 )
[1]
D2,2
1
[0]
D3,3
1
(b) Modified capacity and demand tensor fields
Figure 3.6: Interface functions for network interdependencies
The modified estimates of the supply measure, S0[k] (τ ), and the derived performance measures Q0[k] (τ )
can then be obtained using C0[k] (τ ) and D0[k] (τ ) in Eqs. 3.3 and 3.4. Note that network k itself mod
ifies the sets of base capacities C[lα ] : G[lα ] ∈ πD G[k]
of the supported networks and base demands
[l ]
0[k]
0[k]
D β : G[lβ ] ∈ πC G[k] of the supporting networks via the performances Qα (τ ) and Qβ (τ ), respectively. The interface functions for modifying the capacity and demand are opposite in direction. It follows
that a disruption in a single network in the interdependent infrastructure can propagate to other networks,
magnify itself due to feedback, and cause instability. Also, any set of interdependent networks need to be
solved for convergence and interface stability.
3.6.2
Mathematical forms of interface functions
The previous section explained a basic structure of interface functions. This section proposes typical forms
of interface functions that are useful to model interdependencies given the type of performance analysis. If
the mechanism of interdependence is known, we design the interface function form to mimic the same
effect. However, in case there is no information on the exact mechanism of interdependence, the interface
61
function can be estimated based on data. In this regard, we present three typical forms, 1) logic gates
as interface functions, 2) logistic curves as interface functions, and 3) bilateral perceptrons for modeling
interdependencies.
Consider the example of two networks in Figure 3.7(a). Say the network G[0] has a performance measure
[0]
that is binary, i.e., Qα (τ ) ∈ {0, 1}, and the the capacity of component (3, 3) of network G[1] is dependent on
[0]
[0]
[1]
[0]
the component performances Qα,1,1 (τ ) and Qα,2,2 (τ ), such that MC,3,3 (τ ) = 1 if and only if Qα,1,1 (τ ) =
[0]
[1]
Qα,2,2 (τ ) = 1. Given this description, we can write MC,3,3 (τ ) as
[1]
[0]
[0]
MC,3,3 (τ ) = Qα,1,1 (τ ) ∧ Qα,2,2 (τ )
(3.12)
where ∧ is the logical “and” operator (see Figure 3.7b). Such functional forms of interface function
provides a generalization of fault trees, which have been used in the literature. However, such logic gate
based interface functions would integrate fault trees with any peformance analysis for individual networks
as described in Section 3.4.
62
2
1
1
2
3
[0]
[1]
(a) Interdependent networks
Intercept
[0]
Qα,1,1 (τ )
[0]
Qα,2,2 (τ )
[1]
MC,3,3
(τ )
[0]
Qα,1,1 (τ )
[0]
Qα,2,2
(b) And gate as interface function
Θ0
Θ1
Θ2
(τ )
[1]
MC,3,3 (τ )
(c) Equivalent logistic function
Intercept
[1]
[0]
MC,1,1 (τ )
[0]
MC,2,2 (τ )
[0]
MC,3,3 (τ )
[0]
MC,2,1 (τ )
Qα,1,1 (τ )
[1]
Qα,2,2 (τ )
[1]
Qα,1,2 (τ )
[1]
Qα,2,1 (τ )
[1]
MC,3,1 (τ )
[1]
MC,3,2 (τ )
(d) Perceptron for all possible dependence relations
Figure 3.7: Mathematical forms of interface functions
[1]
Equivalently, another form for MC,3,3 (τ ) can be written using a logistic function as
[0]
[0]
exp Θ0 + Θ1 Qα,1,1 (τ ) + Θ2 Qα,2,2 (τ )
[1]
MC,3,3 (τ ) = Θ3
[0]
[0]
1 + exp Θ0 + Θ1 Qα,1,1 (τ ) + Θ2 Qα,2,2 (τ )
(3.13)
The values of Θ0 , Θ1 , and Θ2 can be so chosen that the function mimics an “and” gate with the required
precision (e.g. Θ0 = −100,Θ1 = Θ2 = 70, and Θ3 = 1 ,see Figure 3.7c). Finally, there can be multiple
interdependencies among the networks and their mechanism may not be clear. In that case, we can use
data to estimate the interface functions. For example, we can assume that all components of G[1] are
63
dependent on all components of G[0] , where each of these dependences is modeled by a logistic function.
This construction would lead to a perceptron structure (see Figure 3.7d). Now, suppose we get recorded
[0]
data for the performance Qα (τ ) and discounted capacity C0[k] (τ ), without the information on which of
the components are interdependent. In that case, we can use the said data to train the perceptron in
Figure 3.7(d) using back-propagation (Rumelhart et al. 1986). All the three cases listed above correspond to
capacity side interdependencies. However, we can model demand-side interdependencies in a similar manner.
3.6.3
Modeling bilateral and looped interdependencies
Section 3.1 identified a significant shortcoming of the current literature in terms of modeling bilateral
or looped interdependencies. As explained in 3.6.1, operational interdependencies, in general, are bilateral
because the capacity and demand-side effects are opposite. A looped interdependency is when the same set
of networks are capacity and demand-side parents of each other. For example, a looped interdependency
exists when a water flow network depends on the power supply for pump operations; however, the power
flow network is also dependent on the water flow network for cooling water supply and steam generation in
a thermal power plant. This section discusses the ability of the proposed formulation to model such cases.
Bilateral or looped interdependencies can be either synchronous or asynchronous. Synchronous bilateral
interdependencies exist when the bilateral effects are simultaneous. However, in the asynchronous case,
the dependence is unilateral at any given time, but the direction changes with time. We can model the
asynchronous bilateral case as two separate cases of unilateral interdependencies at different time steps (e.g.,
see Guidotti et al. 2019).
For synchronous bilateral or looped interdependencies, we can solve the interface functions iteratively for
convergence. The iterative procedure may result in higher computational cost because solving the network
states for a time step would require running the supply optimization multiple times. The rate of convergence
of the procedure depends on the form of the interface functions. We present some experimental findings in
this regard with the conceptual example.
3.6.4
Diagrams to represent network dynamics
Section 3.4 and the previous subsections in Section 3.6 present a complete mathematical formulation
to analyze a general network object, interacting with other similar network objects via its interfaces. A
network object contains several tensors, including data, functions, or predictive statistical models as elements.
To promote accessibility and clear presentation of the modeled network dynamics, we introduce a concise
diagram.
64
Figure 6 shows a general diagram to represent one individual network object. The arrows indicate the relations among different quantities, e.g. the formulation is based on tracking the time evolution of the network
state variables x[k] (τ ). The capacity, C0[k] (τ ) and demand, D0[k] (τ ) are dependent on the state variables.
[k]
The grey colored boxes for supply, S0[k] (τ ) , and control state variables, x:,:,c∈κ (τ ), indicate the mutual
dependence and scope for supply optimization. We show the supporting interface on the left of the network
[k]
layer where C0[k] (τ ) (via the capacity side interface functionsMC (τ ) , and backward acting performances,
[k]
Qβ (τ ), model the incoming and outgoing interactions with the supporting interface. Similarly D0[k] (τ ) (via
[k]
[k]
MD (τ ) ), and forward acting performances Qα (τ ), model the incoming and outgoing interactions with
the supported interface.
[k]
[k]
Supporting
Interface
C0
[k]
Qβ
0 [k]
Qα
S
x[k]
Supported
Interface
[k]
MC
D0
[k]
[k]
MD
Figure 3.8: A concise diagram for a general network object and its interfaces
3.7
A minimal working example for conceptual illustration
We illustrate the proposed formulation using two flow network objects, which have an operational interdependency between a pair of nodes (see Figure 3.9). Network G[1] has three nodes, including one flow
generation node, one transmission node, and one demand node. Network G[2] has four nodes, including
one flow generation node, two transmission nodes, and one demand node. The number of nodes in the two
networks are kept to be different so that they are distinct from each other. There are two possible paths for
flow to get from the generation to the demand nodes for both the networks. These two paths are necessary
to illustrate the supply optimization, as there would exist a choice for the partition of flow among them. We
chose to illustrate interdependencies by having the generation node of G[2] being dependent on the demand
node of G[1] . Thus, G[1] is the capacity side parent of G[2] , and G[2] is the demand side parent of G[1] .
This minimal example clarifies the novelty of the conceptual contributions while illustrating the proposed
formulation’s implementation.
65
2
1
2
3
3
4
1
[1]
[2]
Figure 3.9: A minimal working example of interdepedent networks
3.7.1
Object oriented representation
Following Section 3.4, we start with the representation of the network topology and state variables. For
G[1] , a 3 × 3 × 4 sized tensor represents the state variables, x[1] (τ ). As explained in Section 3.4.1, the first
two dimensions of x[1] (τ ) represent the topology of G[1] . For the third dimension, in this example, we have
four slices of x[1] (τ ). For simplicity, we chose state variables that have specific purposes. The first slice,
[1]
x:,:,1 (τ ) exclusively contains the state variables that are arguments for the component capacities C[1] (τ ).
[1]
The second slice, x:,:,2 (τ ) exclusively contains the arguments for the component demands D[1] (τ ). The third
[1]
[1]
slice, x:,:,3 (τ ) represents the cost per unit flow on the components. Finally the fourth slice, x:,:,4 (τ ) are the
control state variables. Control for G[1] includes controlling the flow generated at the generation node, the
consumption at the demand node, and the flow allowed on each if the 3 edges. For G[2] , a 4 × 4 × 4 sized
tensor represents the state variables, x[1] (τ ). Similar to G[1] , the first two dimensions of x[2] (τ ) represent
the topology of G[2] . The definitions of the third dimension of x[2] (τ ) are identical to those of G[1] .
At time, τ = 0− , in normalcy, the values (? indicates unknown values) of the state variables for G[1] and
G[2] are as follows:
x[1]
0
τ = 0− =
3
1
x[2]
0
9
/2
−
τ = 0 =
−
5/2
−
−
−
−
0
3/2
− 1 − − 0 − − ? − −
−
0 0 − 1 0 − ? ? −
1
0 0 0
4 2 0
? ? ?
1
−
−
−
0
−
−
−
?
−
−
(3.14)
−
0 − − 0 0 − − 1 0 − − ? ? − −
(3.15)
2 1 1/2 − 0 0 0 − 3 0 6 − ? ? ?
− − 0
0 − − 0
2 − − 0
? − − ?
Next we define the capacity tensor fields (see Eq. 3.1). The base capacity for flow generation for a node i
66
[1]
[1]
of G[1] is 4 xi,i,1 (τ ) , and the flow transmission capacity for an edge (i, j) of G[1] is 2 xi,j,1 (τ ) . At time,
τ = 0− , we then have the C[1] (τ = 0− ) as
C[1]
0
−
−
−
= 6 0 −
2 3 4
4 (x3,3,1 )
−
4 (x1,1,1 )
τ = 0− =
2 (x2,1,1 ) 4 (x2,2,1 )
2 (x3,1,1 ) 2 (x3,2,1 )
−
(3.16)
[2]
Similarly for G[2] , the base capacity for flow generation for a node i is 5 xi,i,1 (τ ) , and the flow trans
[2]
mission capacity for an edge (i, j) of G[2] is 2 xi,j,1 (τ ) . At time, τ = 0− , we then have the C[2] (τ = 0− )
as
C[2]
5 (x1,1,1 )
−
2 (x2,1,1 ) 5 (x2,2,1 )
−
τ =0 =
−
2 (x3,2,1 )
2 (x4,1,1 )
−
−
−
0
−
−
−
−
−
9 0 − −
=
5 (x3,3,1 ) 2 (x3,4,1 ) − 4 5 1
5 − − 0
−
5 (x4,4,1 )
(3.17)
Next we define the demand tensor fields (see Eq. 3.2). Both G[1] and G[2] have nodal demands. The
[1]
base demand flow for a node i of G[1] is 4 xi,i,2 (τ ) , and D[1] (τ = 0− ) is
D[1]
4
−
−
−
= − 0 −
− − 0
4 (x3,3,2 )
−
4 (x1,1,2 )
−
τ =0 =
−
4 (x2,2,2 )
−
−
−
(3.18)
[5]
Similarly, the base demand flow for a node i of G[2] is 5 xi,i,2 (τ ) , and D[2] (τ = 0− ) is
D[2]
−
τ =0 =
5 (x1,1,2 )
−
−
−
5
−
−
−
5 (x2,2,2 )
−
−
− 0 − −
=
−
5 (x3,3,2 )
−
− − 0 −
−
−
5 (x4,4,2 )
− − − 0
−
−
−
(3.19)
Next we define the supply equations (see Eq. 3.3). In this example, for both G[1] and G[2] the control state
[1]
[2]
variables, x:,:,4 (τ ) and x:,:,4 (τ ), respectively determine the portion of capacity mobilized on the generation
node and the transmission edges. Hence, in addition to the Kirchoff’s law, and capacity constraints, we have
[1]
[1]
[1]
[2]
[2]
[2]
for any component (i, j) of G[1] , Si,j (τ ) = x:,:,4 (τ )·Ci,j (τ ), and similarly for G[2] , Si,j (τ ) = x:,:,4 (τ )·Ci,j (τ ).
Next we define the component performances (see Eq. 3.4). For G[1] , we define the forward acting nodal
67
demand served (see Figure 3.4) as
[1]
Qα,1,1 (τ ) =
[1]
S1,1 (τ )/D[1] (τ )
1,1
(3.20)
For G[2] , we define the backward acting nodal capacity utilization factor as
[2]
Qβ,3,3 (τ ) =
[2]
S3,3 (τ )/C[2] (τ )
3,3
(3.21)
Since there are only one demand node and one capacity node in each network. The component performance tensors are only defined at one element each.
We define the supply optimization for both network G[1] and G[2] as profit maximization problems. The
profit maximization problem aims to maximizes the total flow on the network while minimizing the cost
incurred on each of the edges. The decision variables in the profit maximization for G[1] and G[2] are the
[1]
[2]
control state variables x:,:,4 (τ ) and x:,:,4 (τ ), respectively. Since, profit is a monetary aggregated performance
measure, we present the profit definitions in the following subsection. The constraints to the optimization
problem are the supply equations.
3.7.2
Aggregated performance measures
In this example, the performance measures defined in Eqs. 3.20-3.21 are directly reducible to scalar values
for the whole networks G[1] and G[2] . However, for the case of supply optimization we define a monetary
profit Qm as an aggregated performance measure for both G[1] and G[2] . Using the state variable recorded
[1]
earlier, the definition of Qm is
[1]
Q[1]
m = 20 S1,1 (τ ) −
[1]
[1]
[1]
S2,1 (τ ) + 4 S3,1 (τ ) + 2 S3,2 (τ )
(3.22)
[2]
and, the definition of Qm is
[2]
Q[2]
m = 20 S1,1 (τ ) −
3.7.3
[2]
[2]
[2]
[2]
S2,1 (τ ) + 3 S3,1 (τ ) + 6 S3,4 (τ ) + 2 S4,1 (τ )
(3.23)
Interdependencies and network interfaces
Network G[1] supports network G[2] . To account for the interdependencies, we need to modify the demand
[1]
on G[1] based on the backward acting performance of G[2] using an interface function MD (τ ), written as
68
[1]
MD
(τ ) =
[1]
MD,1,1
h
i
[2]
Qβ,3,3 (τ ) −
−
1 −
− 1
−
−
(3.24)
h
i
[1]
[2]
where, we define MD,1,1 Qβ,3,3 (τ ) as
[2]
exp −1 + Qβ,3,3 (τ )
[2]
Qβ,3,3 (τ ) = 2
[2]
1 + exp −1 + Qβ,3,3 (τ )
[1]
MD,1,1
h
i
(3.25)
We also need to modify the capacity of G[2] based on the forward acting performance of G[1] using an
[2]
interface function MC (τ ), written as
1
−
−
−
1 1
−
−
[2]
MC (τ ) =
h
i
[1]
− 1 M[2]
1
C,3,3 Qα,1,1 (τ )
1 −
−
1
(3.26)
h
i
[2]
[1]
where, we define MC,3,3 Qα,1,1 (τ ) as
[1]
h
i
exp −5 + 5Qα,1,1 (τ )
[2]
[1]
MC,3,3 Qα,1,1 (τ ) = 2
[1]
1 + exp −5 + 5Qα,1,1 (τ )
(3.27)
The modified demand for G[1] , D0[1] (τ ) is calculated using Eq. 3.10, and the modified capacity for
G[2] , C0[2] (τ ) is calculated using Eq. 3.8. Supply, S0[1] (τ ) is then updated using D0[1] (τ ), and S0[2] (τ )
[1]
[2]
is using C0[2] (τ ). However, the effect on the component performances Qα,1,1 (τ ) and Qβ,3,3 (τ ) is more
[1]
nuanced. For Qα,1,1 (τ ), we use both the updated S0[1] (τ ) and modified D0[1] (τ ) in Eq. 3.20. However, for
[2]
Qβ,3,3 (τ ) we use the updated S0[2] (τ ) but continue using the base capacity C[2] (τ ) in the denominator, i.e.
0[2]
Qβ,3,3 (τ ) =
3.7.4
0[2]
S3,3 (τ )/C[2] (τ )
3,3
.
Results and discussion
Using all the definitions and input data presented in the previous subsections we can now run simulations
for any probabilistic scenarios that affect the state variables x[1] (τ ) and x[2] (τ ). In this example, we
assume that under a hypothetical scenario, the generation node of G[1] gets exposed to a hazard such that
[1]
xi,i,1 (τ = 0+ ) given the intensity measure follows a beta distribution, i.e., fx[1]
i,i,1
(τ =0+ )
(x |IM ) ∼ Be (12, 4).
We begin with solving the network state at τ = 0− for reference. Optimizing the supply at τ = 0− yields
69
following:
[1]
x:,:,4
−
τ =0
−1 −
=
1/2 −
1/2
1
−
−
1
[1]
S
−
τ =0
−4 −
=
3 −
1
3
−
−
4
[1]
x:,:,4
−1 − − −
4
/9 − − −
τ = 0− =
− 1 1 1
1/5
− − −
S[2]
[1]
−5 −
4 −
τ = 0− =
− 4
1 −
[2]
(3.28)
−
−
5
−
−
(3.29)
(3.30)
−
1
−
[1]
(3.31)
[2]
Also, Qα,1,1 (τ = 0− ) = 1 and Qβ,3,3 (τ = 0− ) = 1, and the profit Qm (τ = 0− ) = 67, and Qm (τ = 0− ) =
76.
For simulating interdependencies, we consider two cases. In Case 1, we only model unilateral dependency
between G[1] and G[2] . We discount the capacity of G[2] on account of performance loss of G[1] , but we neglect
the reduction in demand of G[1] . In Case 2, we model the interdependencies and bilateral and synchronous.
We iteratively solve the networks until the convergence of the interface functions. Table 3.1 shows the
statistics of all the relevant measures. Figures 3.10 and 3.11 show the distributions of the performances for
the two cases.
70
Table 3.1: Statistics of performance, interface functions, and computational cost
Case 1
Case 2
mean
st dev
mean
st dev
[1]
50.81
7.07
50.81
7.07
[2]
37.62
13.85
55.92
10.26
[1]
0.75
0.11
0.87
0.06
[2]
0.47
0.17
0.70
0.13
Qm (τ = 0+ )
Qm (τ = 0+ )
Qα,1,1 (τ = 0+ )
Qβ,3,3 (τ = 0+ )
h
i
[1]
[2]
MD,1,1 Qβ,3,3 (τ )
h
i
[2]
[1]
MC,3,3 Qα,1,1 (τ )
1.0
0.0
0.85
0.06
0.47
0.17
0.70
0.13
Number of
1.0
0.0
10.14
1.78
iterations per run
m
m
fQ[2] (q)
Case 1
Case 2
fQ[1] (q)
Case 1
Case 2
0
17
34
q
51
67
0
(a) Network 1
19
38
q
57
76
(b) Network 2
Figure 3.10: Monetary performances for the two networks
Case 1
Case 2
β,3,3
α,1,1
fQ[2] (q)
fQ[1] (q)
Case 1
Case 2
0
0.25 0.5 0.75
q
1
0
(a) Network 1
0.25 0.5 0.75
q
(b) Network 2
Figure 3.11: Operational performances for the two networks
71
1
In Figure 3.10, we observe that profit for G[1] for both cases is identical. However, Case 1 underestimates
the profit for G[2] . For Case 2, the inclusion of reduction in demand for G[1] , improves the operational
[1]
[1]
performance Qα,1,1 . The improved Qα,1,1 leads to an improved available capacity C0[2] (τ ), and the supply
S0[2] (τ ). These effects finally lead to an overall performance improvement for G[2] , both in terms of opera[2]
[2]
tions, Qβ,3,3 and profit Qm . Table 3.1 also shows a basic comparison of the relative computational costs.
Case 1 only requires one iteration each for G[1] and G[2] . However, Case 2 requires the convergence of the
h
i
h
i
[1]
[2]
[2]
[1]
MD,1,1 Qβ,3,3 (τ ) and MC,3,3 Qα,1,1 (τ ) for each run. In this example, we reached the convergence of
the interface functions with 10 iterations on average. These results underscore that modeling of bilateral
synchronous interdependencies is computationally more expensive than the unilateral dependencies. The
results also provide the typical nature of errors that we may encounter if we assume unilateral cases of modeling the bilateral cases rigorously. For this example, the unilateral case provided results that error on the
conservative side. However, results may vary for other examples. Comparing bilateral and unilateral cases
for a small number of iterations is recommended before making such assumptions in real-world examples.
3.8
Conclusions
This chapter presented a novel formulation to model interdependent infrastructure. The chapter provided
a glossary for infrastructure, which expanded some current definitions and introduced new definitions for
physical quantities required to model critical infrastructure. The general mathematical formulation for
modeling infrastructure was then described. The proposed formulation can represent regional infrastructure
by explicitly modeling their various capacities, demands, supply, and derived performance measures. An
approach to model interdependencies using interface functions was then presented. The mathematical forms
of the interface functions were discussed, and their ability to model bilateral and looped interdependencies
was explained. A conceptual example then illustrated the implementation of the proposed formulation
and provided some experimental insights. The results indicated that modeling of bilateral synchronous
interdependencies is computationally more expensive than the unilateral dependencies. The results also
indicated that unilateral cases could be designed to approximate bilateral cases, such that the errors were
on the conservative side.
72
Chapter 4
Regional Resilience Analysis: A
multi-scale approach to optimize the
resilience of interdependent
infrastructure
4.1
Introduction
Reducing hazard-induced disruptions to infrastructure functionality is cardinal to regional resilience
(Bruneau et al. 2003; Gardoni 2019; Doorn et al. 2019; Sharma et al. 2019). Specifically, effective strategies to enhance regional resilience require 1) developing mathematical models for infrastructure recovery; 2)
quantifying resilience associated with the developed recovery process; and 3) developing a computationally
manageable approach for resilience optimization.
Regional resilience optimization has been the subject of extensive research over the past decade (Koliou
et al. 2020; Gardoni 2019). For recovery optimization, current formulations often use monetary objectives
to integrate direct repair costs with non-monetary consequences of disrupted services (e.g., Nayak and
Turnquist 2016). These formulations typically model recovery optimization as a generic scheduling problem
and fail to address the following four important aspects. First, there are various constraints to infrastructure
recovery scheduling, such as activity precedence and workforce availability, which are typical of construction
work over large geographic areas (El-Rayes and Moselhi 2001; García-Nieves et al. 2018). The treatment of
such constraints is limited to assumed values for the recovery duration of damaged components (e.g., Xu
et al. 2019). Second, there are specialized crews that perform specific recovery activities. However, current
formulations (e.g., González et al. 2016) consider simultaneous repairs of damaged components based on the
availability of generic crews. Third, the ownership, managerial, and contractual control of infrastructure
can be different; thus, several recovery teams with varying scope of work perform the recovery. However,
current formulations (e.g., Cavdaroglu et al. 2013) typically do not distinguish such differences and consider
centralized generic resources and crews. Fourth, to model the recovery of disrupted resources and services,
current formulations (e.g., Lee II et al. 2007) claim to perform flow analyses; however, they often do not
consider differential equations that govern the flow of specific resources and services provided by different
73
infrastructure.
This chapter proposes a rigorous mathematical formulation to optimize the resilience of large-scale infrastructure. The novelties of the proposed formulation are 1) a multi-scale model of the recovery process;
2) resilience metrics to capture the temporal and spatial variations of the recovery process; and 3) a computationally efficient optimization approach to improve regional resilience. The proposed multi-scale recovery
model partitions the damaged infrastructure into several recovery zones, prioritizes the recovery zones, and
develops detailed schedules for intra-zonal recovery activities. The proposed recovery model addresses the
first three limitations of current formulations, discussed earlier, and additionally favors practical and easily
manageable recovery schedules. To address the fourth limitation of current formulations, following Sharma
and Gardoni (2019), we consider differential equations that govern the flow of specific resources and services.
To quantify regional resilience, we propose new resilience metrics that capture the temporal and spatial
variations of the recovery process. We then formulate a multi-objective optimization problem that integrates
the multi-scale recovery model, high-fidelity flow analyses, and the proposed resilience metrics to enhance
regional resilience. The multi-objective optimization also minimizes the monitory cost. The proposed formulation significantly reduces the computational cost of scheduling large numbers of recovery activities. The
separate treatment of monetary cost and resilience metrics in optimization problem eliminates the issues
of monetizing the consequences of disrupted services (Tabandeh et al. 2018a). We illustrate the proposed
formulation by considering large-scale interdependent infrastructure in Shelby County, Tennessee, United
States.
The rest of the chapter is organized into four sections. Section 3.2 discusses the recovery modeling
of interdependent infrastructure, including physical and service recovery modeling. Section 3.3 discusses
resilience analysis. Section 3.4 presents the resilience optimization of interdependent infrastructure. Section
3.5 presents a benchmark numerical example. Finally, the last section summarizes the contributions of the
chapter and draws some conclusions.
4.2
Recovery modeling of interdependent infrastructure
This section discusses the recovery modeling of interdependent infrastructure. We first present the
proposed multi-scale model for the physical recovery and then the associated service recovery.
4.2.1
Model for physical recovery
The aim of this section is to develop a detailed schedule for the recovery of hazard-induced damages
and model the effects of the recovery on the physical state of infrastructure. Physical recovery modeling
74
entails scheduling large numbers of recovery activities for geographically distributed components. It is also
crucial to promote schedules that are practical and easy to manage at different levels of detail. To model the
recovery effects on the physical state of infrastructure, we need predictive models for the time evolution of
state variables that define the components. Examples of state variables include material properties, member
dimensions, and boundary conditions.
We propose a multi-scale scheduling of the required recovery activities for the repair or replacement of
damaged components. For each infrastructure, we define a set of recovery zones that partition its damaged
components. The definition of recovery zones can be based on the functional logic and geographic proximity
of components, land use, community neighborhoods, or a combination of different attributes. The top graphic
layer in Figure 4.1 shows a schematic example of recovery zones based on the geographic proximity of com
ponents. In the figure, z[k] = zσ(1) , . . . , zσ(nk ) is the vector of the recovery zones, where [σ (1) , . . . , σ (nk )]
is a permutation of (1, . . . , nk ), and nk is the number of zones.
zσ(1) Intact
Damaged
zσ(nk )
Tributary area
rk
two
e
N
1
Recovery cell
est
n
gio
Re
Tributary area
ter
f in
o
rk
two
2
Ne
Figure 4.1: Schematic partitioning of the infrastructure and region of interest
Our definition of recovery zones leads to two recovery scales, which we call zonal scale and local scale.
First, for the zonal scale, we schedule the sequence of recovery zones for each infrastructure. To avoid
impractical schedules due to selective repairs in different recovery zones, we impose the constraint that all
the recovery activities in a (set of) working zone(s) need to be completed before starting the recovery in the
next (set of) zone(s) in the sequence. However, multiple crew teams can work in parallel in different zones
(see Figure 4.2). The decision about prioritizing the recovery zones and the formation of recovery crew teams
can be made at higher management levels. Second, for the local scale, we perform a detailed scheduling of
the recovery activities inside each zone while accounting for the availability of specialized crews for each
activity. The details of local schedules and securing the required resources can be decided in coordination
75
with local management.
Team 1
zone zσ(1)
Team nT
zone zσ(1)
Start
Inspection
Bidding
Mobilization
Demobilization
Finish
zone zσ(nk )
At the infrastructure level
At the infrastructure level
Zonal priorities
(a) Zonal scale
Fault
detection
Repair
transformers
Fault
detection
Repair circuit
breakers
Repair
transformers
Fault
detection
Repair disconnect
switches
Repair circuit
breakers
Repair
transformers
Commisioning
Repair disconnect
switches
Repair circuit
breakers
zone zσ(1)
Commisioning
Repair disconnect
switches
Commisioning
(b) Local scale
Figure 4.2: Recovery schedule for the repair of damaged electric power substations
Figure 2 illustrates an example schedule according to the proposed multi-scale model. The schedule has
been developed for the repair of damaged substations in an electric power infrastructure. Figure 4.2(a) shows
the zonal priority sequence z[k] , and a set of non-repetitive activities (i.e., inspection, bidding, mobilization
and demobilization), which are part of every recovery project. Figure 4.2(b) illustrates the detail of the
recovery schedule at the local scale considering, for example, zone zσ(1) . The local scale recovery consists
of scheduling repetitive recovery activities for similar components in each zone. In the developed schedule,
each recovery team consists of 1) diagnostic crews, who detect components’ faults, before the recovery starts,
and certify the completion of the recovery (i.e., commissioning); and 2) repair crews, who perform the actual
repair of transformers, circuit breakers, and disconnect switches.
To estimate the duration of recovery activities, we obtain the productivity of each crew from the available
databases (e.g., the RS Means database (Means 2016).) The values of productivity from such databases are
for construction under normal conditions. To account for the specific conditions during the post-disaster
recovery, we modify the productivity ηq as
ηq0 = ω (qκ /qκ,min )
76
1−εκ
ηq ,
(4.1)
where ηq0 is the modified productivity of a crew of type κ and size qκ ; qκ,min is the minimum required crew
size; ω is a factor that captures specific conditions such as skilled working force, working hours per day, and
weather (Sharma et al. 2018a); εκ is a small positive constant to adjust for the crew congestion in a team.
For a developed recovery schedule, we model the time-evolution of state variables. Following Sharma
et al. (2018a), we can write the vector of state variables for each component during the recovery as
x (τ ) =
∞
X
x (τr,i−1 ) 1{τ ∈[τr,i−1 ,τr,i )}
i=1
+
∞
X
(4.2)
∆x (τs,j ) 1{τ ∈(τr,i−1 ,τr,i ),τs,j ∈(τr,i−1 ,τ )} ,
i,j=1
where x (τ ) is the vector of state variables at time τ ∈ [0, TR ], in which TR is the recovery duration; x (τr,i )
is the vector of state variables after completing a set of recovery activities, called a recovery step, that lead
to a change in state variables at time τr,i ; 1{·} is an indicator function; ∆x (τs,j ) is the state change due
to the occurrence of a disrupting at time τs,j ∈ (τr,i−1 , τr,i ); τ ∈ (·, ·), τ ∈ [·, ·), and τ ∈ [·, ·], respectively,
indicate open-open, closed-open, and closed-closed intervals.
In the proposed multi-scale approach, we decompose τr,i as τr,i = ξr,z +ξr,l +ξr,i , where ξr,z is the starting
time of the recovery in zone z; ξr,l is the starting time of the recovery of component l in zone z, measured
with respect to ξr,z ; and ξr,i is the completion time of recovery step i in zone z, measured with respect to
ξr,l . The estimates of ξr,z , ξr,l , and ξr,i are functions of the developed schedules at the zonal and local scales,
as explained earlier.
4.2.2
Model for service recovery
Following Sharma and Gardoni (2019), we represent infrastructure as a collection of networks, where
each network captures a specific feature/function of the infrastructure. For example, a structural network
can describe the connectivity and physical state of the infrastructure, and a flow network can describe its
functionality.
We write G =
[k]
G = V [k] , E [k] : k = 1, . . . , K
as the set of all networks required to represent the
infrastructure. Every network G[k] consists of nodal components, V [k] , and line components, E [k] . Each
G[k] is characterized by a set of vectors that define its feature/function. The set of vectors are components’
1) state variables x[k] (τ ), 2) capacity measures C[k] (τ ) that capture the abilities to generate or transmit
specific resources, 3) demand measures D[k] (τ ) that capture the needs of consumers in terms of the specific
resources, and 4) supply measures S[k] (τ ) that capture the portion of the capacities mobilized by the network
to meet the imposed demands.
77
As an example, Figure 4.3 illustrates the mathematical representation of an electric power infrastructure.
Figure 4.3(a) shows a schematic of the infrastructure that consists of a power plant, transformers, switching
equipment (circuit breakers and disconnect switches, see Figure 4.4 for detail), and distribution. The mathematical model of the infrastructure consists of a structural network G[1] (shown in Figure 4.3b) and a power
flow network G[2] (shown in Figure 4.3c), i.e., G = G[1] , G[2] . For a given hazard, G[1] needs to include all
the vulnerable components of the infrastructure. Figure 4.3(b) shows power plant structure, transformers,
and switching equipment as the components of G[1] that are vulnerable to seismic hazard. Furthermore, G[2]
needs to include all the components required to perform power flow analysis. Figure 4.3(c) shows a circuit
diagram of G[2] with a generator, transformers, buses and a load, as an example. G[2] is dependent on G[1]
for providing structural support.
Power
plant
Transformer
Distribution
Switching
equipment
(a) Schematic of the infrastructure
Power
house
Switching
equipment
Transformer
(b) Structural network
Generator Transformer
Bus
Load
(c) Power flow network
Figure 4.3: Mathematical representation of an electric power infrastructure
Input
[3]
[6]
[2]
[5]
[1]
[4]
Output
Figure 4.4: Schematic representation of switching equipment for a typical node in a substation
78
The service recovery modeling builds upon the recovery models of x[k] (τ ), C[k] (τ ), D[k] (τ ), and S[k] (τ )
for all G[k] ∈ G. Among the state variables x[k] (τ ), we distinguish control state variables (that can be
modified by the network operation controller), from non-control state variables (that define the physical
state of the network). The recovery of the control state variables is modeled in combination with S[k] (τ )
(discussed next), while the recovery of the non-control state variables is modeled by Eq. (4.2). To model the
recovery of C[k] (τ ) and D[k] (τ ), we substitute x[k] (τ ) in the models for C[k] (τ ) and D[k] (τ ). In Figure 4.3,
the vector x[1] (τ ) (for G[1] ) contains the structural properties of the individual components, and C[1] (τ ) and
D[1] (τ ) are physical quantities such as deformations and stresses (Gardoni et al. 2002, 2003). The vector
x[2] (τ ) (for G[2] ) contains the control state variables like voltage, phase angle, and non-control state variables
like resistance, inductance, and capacitance. Also, C[2] (τ ) and D[2] (τ ) are in terms of active, reactive, and
apparent power (Glover et al. 2012.)
At a given time τ , S[k] (τ ) is a function of x[k] (τ ), C[k] (τ ), and D[k] (τ ). In a general structural network,
the elements of S[k] (τ ) are the same as respective demands insofar as the demands do not exceed the
respective capacities; otherwise, the elements of S[k] (τ ) are zero. However, in a flow network, S[k] (τ )
measures the flow generated at source node(s), consumed at delivery node(s), and transmitted through the
line components. To model S[k] (τ ), we need to solve a system of coupled differential equations. For each line
component e ∈ E [k] , we can write conservation laws (e.g., conservation of mass, linear momentum, energy,
or electric charge) as
[k]
∂τ f1
h
i
h
i
h
i
[k]
[k]
x[k] (τ ) + ∂y f2 x[k] (τ ) = f3 x[k] (τ ) ,
[k]
(4.3)
[k]
where f1 (·) is the conserved quantity of interest; y ∈ R is the space variable along e; f2 (·) is the flux
[k]
of the conserved quantity; and f3 (·) is the source term. The boundary conditions of line components at
vertices combined with the capacities of source node(s) and demands at delivery node(s) need to jointly
satisfy some equilibrium conditions (i.e., Kirchhoff’s law). Differential equations for all line components
along with their boundary conditions give rise to a system of coupled differential equations. Details of
such differential equations for specific flow networks and their solution approaches are readily available in
literature (e.g., Bressan et al. 2014 for hydraulic, gas, and traffic flow networks and Glover et al. 2012 for
power flow network.)
For the example infrastructure in Figure 4.3, we define S[1] (τ ) = D[1] (τ )1{D[1] (τ )≺C[1] (τ )} , where and
≺ are the element-wise multiplication and comparison operators. Also, S[2] (τ ) represents the apparent power
flow generated by the generator, transmitted by the transformers and transmission lines, and consumed at
the load. The estimates of S[2] (τ ) are from the solution of the governing differential equations of power flow
79
(Glover et al. 2012).
To quantify the performance of each network G[k] ∈ G, we define derived performance measures Q[k] (τ ) =
Q[k] C[k] (τ ) , D[k] (τ ) , S[k] (τ ) . For the example in Figure 4.3, we define Q[1] (τ ) = P C[1] (τ ) D[1] (τ )
as the structural reliability of the components of G[1] , where the event C[1] (τ ) D[1] (τ ) represent the
survival of the structural components. We denote the structural failure event (i.e., the complementary
of the survival event) for each component as F[·] , where subscript denotes the component. Figure 4.4
(adapted from Shinozuka et al. 1998) shows a detail of switching equipment available at a typical node
inside a substation (see switching equipment in Figure 4.3). The shaded boxes in Figure 4.4 are compound
components; each consists of a circuit breaker and two disconnect switches. Open circles and slashes represent
the circuit breakers and disconnect switches, respectively. We model transformers as line components that
are connecting two nodes. A group of nodes and transformers that have the same geographic location
constitute a substation.
The failure of a node is the event that the input and output lines are disconnected. To determine the state
of a node, we first determine the state (failure/survival) of its components. To do so, we use the respective
fragility curves together with the hazard intensity measures. In the case of seismic hazard, we may use
the existing fragility curves (e.g., FEMA 2014) with the Peak Ground Acceleration (PGA) of earthquake
ground motions as the intensity measure. We can then write the failure event of a compound component
as F[i] = FCBi ∪ FDS1i ∪ FDS2i , for i = 1, . . . , 6, where FCBi is the failure event of a circuit breaker CB i ;
and FDS1i and FDS2i are the failure event of a disconnect switch DS1i and DS2i . Finally, we can write the
failure event of a typical node as
Fnode = F[1] F[3] ∪ F[4] F[6] ∪ F[1] F[6] ∪ F[3] F[4] ,
(4.4)
where F[i] F[j] indicates the intersection of the events F[i] and F[j] , for i, j = 1, . . . , 6. We formulate a system
reliability problem to estimate the probability of the event Fnode . For transformers, the structural failure
probability is directly calculated from the component fragilities (FEMA 2014).
Also, we define Q[2] (τ ) = S[2] (τ ) D[2] (τ ) 1{D[2] (τ )0} as the fraction of demand served at the
delivery node(s) of G[2] , where is the element-wise division operator; and 1{D[2] (τ )0} ensures Q[2] (τ ) is
defined for non-zeros demands. The functionality of each infrastructure is in terms of the performance of
the network(s) with direct interface(s) with the customers. For the example in Figure 4.3, the functionality
of the electric power infrastructure is based on Q[2] (τ ).
To incorporate the effects of interdependencies among networks, we use a set of interface functions that
modify C[k] (τ ) and D[k] (τ ) (see Figure 4.5). The interface functions capture the combined effects of all
80
supporting networks on C[k] (τ ) and the combined effects of all supported networks on D[k] (τ ). Following
Sharma and Gardoni (2019, 2020), we can write the vectors of modified capacity C0[k] (τ ) and modified
demand D0[k] (τ ) for each G[k] as
C0[k] (τ ) = C[k] (τ ) M[k]
C (τ ) ,
(4.5)
[k]
D0[k] (τ ) = D[k] (τ ) MD
(τ ) ,
[k]
[k]
where MC (τ ) and MD (τ ) are the vectors of interface functions. Mathematically, we can write
[k] [l]
M[k]
Q (·) : G[l] ∈ πC G[k]
,
C (τ ) = MC
(4.6)
[k] [m]
M[k]
Q (·) : G[m] ∈ πD G[k]
,
D (τ ) = MD
where πC G[k] indicates all the supporting networks of G[k] and ; D0[k] (·) and πD G[k] indicates all the
supported networks by G[k] . For instance, when considering interdependencies between power flow and
hydraulic flow networks, the derived performance measures of the power flow network affect the capacities
of the hydraulic flow network. Conversely, the derived performance measures of the hydraulic flow network
affect the demands on the power flow network.
Supporting
networks of G[k]
[k]
MC
C0[k]
0[k]
Q1
[k]
G
S
0[k]
x[k]
Supporting
networks of G[l]
0[k]
[l]
Q2
MC
D0[k]
MD
G[l]
C0[l]
S
x[l]
0[l]
[k]
Q1
Networks
supported by G[k]
0[l]
Q2
0[l]
D0[l]
[l]
MD
Networks
supported by G[l]
Figure 4.5: Dynamics of interdependent networks
For the example in Figure 4.3, G[2] is dependent on G[1] . As C[1] (τ ) and D[1] (τ ) are independent of
[1]
[1]
[2]
G[2] , MC (τ ) and MD (τ ) would be a vector of ones. However, MC (τ ) consists of functions of component
[2]
performances Q[1] (τ ). In each scenario, the value of MC (τ ) for each component is binary {0, 1}, based on
[2]
the structural reliability of the corresponding node or transformer. Also, MD (τ ) would be a vector of ones
in this example.
We can then calculate the modified supply estimates, S0[k] (τ ), incorporating the effects of C0[k] (τ ) and
81
D0[k] (τ ) in the governing differential equations. Similarly, we calculate the modified estimates of the derived
performance measures Q0[k] (τ ) which captures the service recovery of G[k] .
4.3
Resilience quantification
Resilience quantification is of interest in terms of the collective functionality of all infrastructure. There
fore, we define a recovery curve, Q (τ ), for the region of interest as a function of Q0[k] (τ ) : k = 1, . . . , K .
For each G[k] ∈ G, the region of interest is divided into tributary areas (see Figure 4.1); a tributary area is
the portion of the region of interest served by an individual component from a network. The intersections of
n
α
, each served by a unique combination of
the tributary areas for all G[k] ∈ G result in recovery cells {Ωα }α=1
components from the respective networks (see the partitioning of the region of interest in Figure 4.1). For
n
α
a given set {Ωα }α=1
, the modeling of Q (τ ) entails three steps. First, for each G[k] ∈ G, we define a map
[k]
Q0[k] (τ ) 7→ Qα (τ ) that yields the functionality of G[k] in cell Ωα . Second, for each Ωα , we define Qα (τ )
o
n
[k]
as a function of Qα (τ ) : k = 1, . . . , K . Finally, we define Q (τ ) as a function of {Qα (τ ) : α = 1, . . . , nα },
n
α
which is an aggregate performance measure over {Ωα }α=1
.
Once properly modeled, Q (τ ) provides complete information about regional resilience. Resilience metrics
are convenient means to quantify and capture specific aspects of resilience. Sharma et al. (2018a) proposed
a general approach for resilience quantification that decomposes the recovery curve in terms of its partial
descriptors. Examples of these resilience metrics are
1) The Center of Resilience, ρQ , that combines the residual performance in the immediate aftermath of
a disruption with the recovery duration. Mathematically, we can write ρQ in analogy with the mean
of a random variable as
TR
τ dQ (τ )
ρQ = 0 TR
,
dQ
(τ
)
0
(4.7)
2) The Resilience Bandwidth, χQ , is a measure of dispersion of recovery. Mathematically, we can write
χQ in analogy with the standard deviation of a random variable as
v
u TR
2
u
(τ − ρQ ) dQ (τ )
.
χQ = t 0 TR
dQ (τ )
0
In Eqs.
(4.8)
(4.7) and(4.8), ρQ approximately corresponds to the recovery duration at which Q (τ ) =
Q (τ = TR ) /2 and χQ captures the spread of the recovery, describing whether the recovery progression
occurs gradually over time (larger values of χQ ) or over a short duration around ρQ (smaller values of χQ ).
82
In regional resilience analysis, the performance measure is generally a function of time and space.
Let Q (τ, y) indicate a recovery surface and dQ (τ, y) its rate function at time τ ∈ [0, TR ] and location
y = (y1 , y2 ) ∈ Ω ⊂ R2 in the region of interest (see Figure 4.6a). Using Q (τ, y = ŷ) as the recovery curve in
Eqs. (4.7) and (4.8), we obtain the Temporal Center of Resilience, ρQ (ŷ), and Temporal Resilience Bandwidth, χQ (ŷ) for the given location y = ŷ (see Figure 4.6b). Likewise, we can define spatial resilience metrics
at any time instance during the recovery. For example, we define the Spatial Center of Resilience at a fixed
time during the recovery τ = τ̂ as
ydQ (τ = τ̂ , y) dy1 dy2
,
dQ (τ = τ̂ , y) dy1 dy2
Ω
ρQ (τ̂ ) = Ω
(4.9)
and, the respective Spatial Resilience Bandwidth as
v
u 2
u
t Ω y−ρQ (τ̂ ) 2 dQ (τ = τ̂ , y) dy1 dy2
χQ (τ̂ ) =
,
dQ (τ = τ̂ , y) dy1 dy2
Ω
(4.10)
where k·k2 is the Euclidean norm. Similar to the temporal resilience metrics, we can extend the definitions
of the spatial resilience metrics to higher order ones.
83
y1
dQ (τ, y1)
y1
Q (τ, y1)
τ
τ
dQ (τ, y1)
dQ (τ, ŷ1)
(a) Recovery surface and its rate function
y1
=
ρQ (ŷ1)
ŷ 1
dQ (τ, y1)
dQ (τ̂ , y1)
τ
ρQ (τ̂ )
d ρQ (τ̂ ) , ρ∗Q (τ̂ )
y1
dQ∗ (τ̂ , y1)
ρQ (τ̂ ) , ρ∗Q (τ̂ )
τ
χQ (τ̂ )
y1
τ=
τ̂
d
χQ (ŷ1)
ρ∗Q (τ̂ )
τ̂
y1
(b) Temporal and spatial resilience metrics
Figure 4.6: Schematic description of resilience quantification
The rate function dQ (τ, y) captures the variation of functionality recovery across the region of interest,
at any given time. Accordingly, ρQ (τ̂ ) and χQ (τ̂ ) represent the centroid and the spread of functionality
recovery across the region, at time τ = τ̂ . Under a uniform recovery progress, dQ∗ (τ, y), the respective ρ∗Q (τ̂ )
would correspond to the centroid of the space Ω, and χ∗Q (τ̂ ) would correspond to the standard deviation of
a uniform distribution over the space Ω (see Figure 4.6b). The deviations of the recordedρQ (τ̂ ) and χQ (τ̂ )
from the corresponding ρ∗Q (τ̂ ) and χ∗Q (τ̂ ) at any τ̂ capture spatial non-uniformity in the recovery progression.
We can promote a uniform recovery progress over space by selecting recovery schedules that minimize the
T
T
spatial disparity metrics dρ = 0 R d ρQ (τ̂ ) , ρ∗Q (τ̂ ) dτ̂ /TR and dχ = 0 R d χQ (τ̂ ) , χ∗Q (τ̂ ) dτ̂ /TR , where
d [·, ·] is a distance function (e.g., d (a, b) = ka − bk2 ). The proposed spatial resilience metrics can identify
portions of the community that recover more slowly, and guide recovery activities and public policies to
promote distributive justice.
84
4.4
Resilience optimization of interdependent infrastructure
We formulate a multi-objective optimization problem that integrates the multi-scale model of physical
recovery, high-fidelity flow analyses for service recovery modeling, and resilience metrics to improve regional
resilience, while minimizing the recovery cost. The proposed formulation enables developing realistic recovery schedules for large scale interdependent infrastructure, while maintaining the computational feasibility.
First, the multi-scale recovery model breaks down the high-dimensional optimization problem of prioritizing
individual components into a hierarchy of decoupled low-dimensional optimization problems. At the zonal
scale, we prioritize the recovery zones and at the local scale, we prioritize the recovery of damaged components inside each zone. The local scale priorities are independent of the zonal scale priorities and can be
ascertained in advance. Second, for a developed schedule, the high-fidelity flow analyses allow us to accurately model the functionality recovery of interdependent infrastructure. Finally, the resilience metrics allow
us to treat monetary and non-monetary objectives separately; hence, we eliminate the issues of monetizing
the consequences of disrupted services (as noted by Tabandeh et al. 2018a).
n
o
[k]
[k]
[k]
The set GD = GD = VD , ED : k = 1, . . . , K represents networks with physical damages, where
[k]
[k]
[k]
VD ⊆ V [k] and ED ⊆ E [k] . Also, let z[k] = zσ(1) , . . . , zσ(nk ) be the vector of the recovery zones for GD .
[k]
[k]
[k]
[k]
Each z[k] defines a partition Pz[k] (·) on VD , ED such that Pz[k] (i) VD ∩ Pz[k] (j) VD
= ∅, for all
Snk
[k]
[k]
[k]
[k]
i 6= j, and i=1 Pz[k] (i) VD = VD , where Pz[k] (i) VD ⊂ VD is the set of damaged nodal components
[k]
in zone z[k] (i) (i.e., zσ(i) ); the same definition applies to ED . Mathematically, we write the set of objective
functions to be minimized as
minimize {R [Q (τ, Z)] , cr (GD , Z)} ,
(4.11)
where R (·) is the (set of) objective function(s) to be minimized, defined based on the proposed resilience
metrics; Z = z[1] , . . . , z[K] is the collection of the vectors of the recovery zones for all the networks in GD ;
and cr (·) is the recovery cost function that includes the material cost and schedule-dependent crew cost.
The decision variables of the optimization problem are the priorities of the recovery zones for each z[k] ∈ Z,
k = 1, . . . , K.
Mathematically, we can write cr (GD , Z) as
85
cr (GD , Z) =
|z|
XX
X
X
cm,a qa
z∈Z i=1
v∈Pz(i) (VD ) a∈Av
+
X
X
(4.12)
cm,a qa
e∈Pz(i) (ED ) a∈Ae
+
X X
cc,κ qκ ∆τκ (z)
z∈Z κ∈Kz
where cr (GD , Z) is the cost of material and the cost of hiring the crews; Av is the vector of activities
needed for the recovery of damaged nodal components in recovery zone z (i); cm,a represents the unit price
of material used in a ∈ Av ; qa is the quantity of material used in a ∈ Av ; similarly, Ae is the vector of
activities for the recovery of line components in z (i); Kz represents the collection of all types of crews, cc,κ
is the hiring cost per unit time (including the equipment) for each crew κ, and ∆τκ (z) is the total hiring
time for each crew.
The minimization problem in Eq. 4.11 involves scheduling constraints for the recovery activities in each
zone as well as the service recovery constraints. Each set of these constrains entails a nested optimization
as explained in the following subsections.
4.4.1
Physical recovery optimization
We schedule the intra-zonal recovery activities while minimizing the physical recovery duration for each
zone. Here we account for the specific scheduling constraints of crew availability, crew continuity and activity
precedence. The decision variables are the recovery priorities of damaged components inside the zone. The
physical recovery time minimization problem at the local scale can be written as follows:
minimize
max {τr,a : a ∈ Az } ,
subject to ξr,σ(a) − ∆ξr,σ(a) ≥ ξr,σ(a−1) + ∆ξlag,σ(a−1) ,
for all a ∈ Al ,
(4.13)
ξr,σ(l0 ) + ξr,σ(a) − ∆ξr,σ(a) ≥ ξr,σ(l) + ξr,σ(a)
+ ∆ξlag,σ(l) ,
for all a ∈ Aσ(l) ∩ Aσ(l0 ) ,
where τr,a is the completion time of the recovery activity a ∈ Az , in which Az =
S
l∈{Pz (VD )∪Pz (ED )}
Al
(recovery activities in zone z, obtained by a union over the sets Al ); Al represents the recovery activities
needed for component l inside z; σ (a) shows the priority of the recovery activity a; ξr,σ(a) − ∆ξr,σ(a) is the
86
time at which the recovery activity with priority σ (a) starts; ∆ξr,σ(a) is the time required to complete the
activity; ∆ξlag,σ(a−1) is the lag time after the completion of activity σ (a − 1) and before the start of activity
σ (a); ∆ξlag,σ(l) is the lag time between the same recovery activities for two different components with the
priorities σ (l0 ) > σ (l).
The estimates of τr,a ’s in Eq. (4.13) are obtained from a detailed schedule for the crews to perform the
set of repetitive recovery activities {a ∈ Az }. Such schedules are subject to physical and logical constraints.
The first constraint in Eq. (4.13) is of a logical type and ensures that a recovery activity can start only after
completing its preceding recovery activity for the same component (see solid arrows in Figure 4.2b). The
second constraint in Eq. (4.13) is of a physical type and ensures that the crews perform their respective
activities according to the assigned priority of the components (see the dashed arrows in Figure 4.2b). The
allocated workforce and material constraints are inherited from the optimization problem in Eq. (4.11). In
construction literature, this procedure known as a resource allocation algorithm. To develop such schedules,
we follow the procedure outlined by El-Rayes and Moselhi (2001).
4.4.2
Service recovery optimization
We formulate a service recovery optimization to obtain a unique solution for Eq. (4.3). The result for
each network is a strategy to distribute the flow of resources through the network. The service recovery aims
to minimize the differences between demand and supply values. Because, at any given time the network
operators try to best serve the demand using the available resources. The decision variable is the vector of
control state variables x[k] (τ ). For each G[k] ∈ G, we write
minimize
h
i
`[k] D0[k] (τ ) , S0[k] (τ ) , w[k] ,
subject to S0[k] (τ ) C0[k] (τ ) ,
Sv0[k] (τ ) =
X
Se0[k] (τ ) −
[k]
(4.14)
X
Se0[k] (τ ) ,
[k]
e∈Ein (v)
e∈Eout (v)
for all v ∈ V [k]
where `[k] (·) captures the differences between the supply and demand; w[k] represents the assigned weights for
components to capture their relative importance; and S0[k] (τ ) C0[k] (τ ) is the typical capacity constraints
for flow networks. The last constraint represents the Kirchhoff’s law and enforces that the flow is balanced
0[k]
at each vertex v ∈ V [k] , in which Sv (τ ) is the supply estimate at v ∈ V ; the first summation is the
[k]
in-flow to v ∈ V [k] from e = (v 0 , v) ∈ Ein (v), and the second summation is the out-flow from v ∈ V [k] to
87
[k]
e = (v, v 0 ) ∈ Eout (v). Note that in writing the optimization problem, the vector of decision variables is
implicit in the supply estimates.
4.5
Resilience-informed infrastructure recovery: A benchmark
example
We illustrate the proposed formulation considering resilience optimization of infrastructure in Shelby
County, Tennessee, United States. We model the electric power and potable water infrastructure of Shelby
County to illustrate the handling of infrastructure interdependencies. Shelby County has a population of
approximately 1, 000, 000 people, and the region is subject to seismic hazards originating from New Madrid
Seismic Zone (NMSZ). As a disrupting event, we model a 7.7 magnitude earthquake with epicenter at 35.93°N
and 89.92°W (i.e., North-West of Shelby County). To model the spatial variation of the earthquake intensity
measures, we use a three-dimensional physics-based model (Guidotti et al. 2011) for regions closer to the
earthquake source (including the entire Shelby County) and ground motion prediction equations for regions
farther away from the source (Steelman et al. 2007).
4.5.1
Description of infrastructure
The electric power infrastructure in Shelby County is managed by the Memphis Light, Gas, and Water
(MLGW) Division. The balancing authority of the region is the Tennessee Valley Authority (TVA), who
owns and operates the generators and transmission lines providing power to MLGW. Considering Shelby
County as the region of interest, we use a hybrid resolution model of the electric power infrastructure; inside
Shelby County, we use a higher resolution model to capture the variability of impact in different areas and
accurately estimate the timeline of power outage; outside Shelby County (i.e., rest of Tennessee), we use
a lower resolution model which is sufficient to capture the effects of damage to the external substations
supplying power to Shelby County and perform accurate power flow analyses. The model for the power flow
analysis is from Sharma et al. (2019). Figure 4.7 shows the details of the electric power infrastructure model
in Shelby County and the entire state of Tennessee.
88
Subst
a
t
i
ons [
kV]Tr
a
nsmi
ssi
on[
kV]
!
? ≤
161
≤161
@ 2
!
30
230
!
C 5
00
500
!
C
?
!
?
@
?
!
?!
?!
!
?
!
?
!
?
!
@
?
!
?
!
?
!
?
!
@ ?
?
!
!
? !
@ ?
!
?
C
?
?
! !
!
?
!
?!
?
!
!
?
?
?
? !
!
?
!
?
! !
?
!
?
!
!
? ?
?
!
!
?
?
!
?!
!
C
?
!
?
!
?
!
.
!
?
!
?
!
? ?
!
?
!
?
!
?
!
!
?
!
?
!
?
!
?
!
?
!
.
@
!
@
!
!
C!
.
@
@ !
!
!
C
?
!
?
@
@
!
!
?
!
?
?
!
?
!
!
?
?
!
?
!
?
!
!
@
?
?!
?
@
!
!
!
?
C
?
?
!
?
!
?
!
?
!
?
!
!
?
@
?
!
!
?
?
!
?
?!
!
!
?!
?
?
C
?
?!
?
!
?
!
!
!
.
?!
?
?
!
?
!
?!
!
?!
?!
!
?
!
?!
!
.
!
C !
C
@
!
@
!
!
C
@
!
!
@
!
C
!
.
@
!
@
!
@
!
@
!
@
!
!
C
!
.
@
!
@
!
Powe
rPl
a
nt
s
!
. Co
a
l
s
!
. Ga
dr
o
!
. Hy
!
. Nu
c
l
e
a
r
!
?
@
!
@
@ !
!
!
C
@ !
!
.
@
! !
@
@
!
@!
@!
!
C
@
!
@!
@@
@ !
!
@ !
!
@
!
!
C !
C
@
!
@
!
!
C
@
!
.
@ !
!
@
!
@
!
@
!
@
!
@
!
@
!
C!
.
! !
@
C!
!
@ @
@!
!
@
!
@
!
@
!
!
C
@
!
Tr
i
but
a
r
yAr
e
a
s
She
l
byCount
y
Te
nne
sse
e
@ !
!
@
@
C !
@!
!
!!
!
C!
.
@!
@C !
C !
@
@
!
!
C
!
@
!
C
!
C
!
.
@
!
!
@
!
C
!
C!
@
@
!
@
!
Figure 4.7: Electric power infrastructure
The potable water infrastructure in Shelby County is also managed by MLGW. The entire Shelby County
is served by a self-contained water infrastructure. The source of the water is the Memphis Sand Aquifer, and
potable water is supplied throughout the county using a system of wells, pumping stations, and pipelines.
The hydraulic flow network model is from Sharma et al. (2019). Figure 4.8 shows the details of the potable
water infrastructure model in Shelby County. To identify low- and high-pressure zones, we also show the
elevation raster map in the figure.
Elevation [m]
High : 141
Low : 58
Reservoir
Storage Tank
Pumping Station
Pipeline
Figure 4.8: Potable water infrastructure
4.5.2
Recovery modeling of electric power infrastructure
As explained in Section 2.2, the model of the electric power infrastructure consists of a structural network,
G[1] , and a power flow network, G[2] . The occurrence of the earthquake directly impacts G[1] and indirectly
89
impacts G[2] through its dependency on G[1] . The functionality of the infrastructure is in terms of the
performance of G[2] . The physical recovery modeling corresponds to the recovery modeling of G[1] , whereas
the service recovery modeling corresponds to the recovery modeling of G[2] .
To model the physical recovery, we first need to predict the damage to the components of G[1] . Transformers, circuit breakers, and disconnect switches are the components of G[1] that are vulnerable to seismic
excitations. The locations of all vulnerable components are inside electric power substations. The vector
x[1] (τ ) includes the structural properties of the components required for damage predictions. In this example, we use the fragility curves of the components from HAZUS (FEMA 2014) together with the earthquake
intensity measures to predict the induced damages. The input x[1] (τ ) to characterize the fragility curves
includes the foundation type (anchored or unanchored) and voltage level (as a proxy of size and mass) for
each type of component. We define Q[1] (τ ) in terms of the reliability estimates of 1) switching equipment
for each node, and 2) transformers. Estimation of these reliabilities are identical to the schematic example in
Section 3.2.2. The nodes that have failed (i.e., disconnected) would become critical nodes, whereas the ones
which are damaged but not failed are non-critical nodes in the recovery process. For transformers, the structural failure event simply corresponds to the disconnection of transformers. Since there is no redundancy
for transformers, all transformer repairs become critical repairs.
There are 36 substations in Shelby County. We define each substation and its tributary area as a recovery
zone. Due to the large footprint of the electric power infrastructure in this example and the fact that two
different agencies, MLGW and TVA, manage the infrastructure inside and outside Shelby County, we define
four different recovery projects 1) MLGW critical repairs, required to recover failed nodes and transformers
in Shelby County; 2) MLGW noncritical repairs, required to recover the functional but damaged nodes in
Shelby County; 3) TVA critical repairs, required to recover failed nodes and transformers in the remaining of
Tennessee (i.e., outside of Shelby County); and 4) TVA non-critical repairs, required to recover the functional
but damaged nodes in the remaining of Tennessee. We assign different recovery teams for each of these four
projects.
Figure 4.2 shows the recovery schedule for the repair of damaged nodes inside each substation. Table 4.1
summarizes the productivities for the identified recovery activities, derived from RS Means (Means 2016).
We then adjust these productivities using Eq. (4.1), with values of ω = 0.83 and εκ = 0.1 for all κ (Ibbs and
Sun 2017). To account for the specific condition of post-disaster recovery, we increase the working hours per
day to 24 hours (MLGW 2017b). Furthermore, Table 4.2 shows the formation of the recovery teams for the
critical and non-critical repairs, required to model {τr,i } in Eq. (4.2). Each recovery team for the MLGW
operated infrastructure consists of 2 diagnostic crews and 4 repair crews, whereas each recovery team for
the TVA operated infrastructure consists of 5 diagnostic crews and 10 repair crews. The diagnostic crews
90
perform fault detection and commissioning, and the repair crews perform the repair of transformers, circuit
breakers, and disconnect switches.
Table 4.1: Productivity for the recovery activities to repair damaged substations
Activity
Unit
Mean productivity
[units/crew/8 hrs.]
−
−
Number
−
−
−
Fault detection
Number
8
Transformer repair
Number
0.5
Circuit breaker repair
Number
2
Disconnect switch repair
Number
4
Commissioning
Number
8
Demobilization
−
−
Inspection
Bidding
Mobilization
Table 4.2: Formation of the recovery teams for the repair of damaged substations
Operator
MLGW
TVA
Team
Diagnostic crews
Repair crews
1
2
4
2
2
4
3
2
4
1
5
10
2
5
10
3
5
10
To model the service recovery, we need to predict the functionality of the electric power infrastructure.
The functionality is in terms of Q[2] (τ ), which is obtained from the power flow analysis of G[2] for each
time τ . As explained in Section 2.2, the components of G[2] are generators, transformers, transmission
lines, buses (nodes), loads, and shunts. The vector x[2] (τ ) contains the control state variables like voltage,
phase angle, and non-control state variables like resistance, inductance, and capacitance. Also, C[2] (τ ) and
D[2] (τ ) are in terms of active, reactive, and apparent power (Glover et al. 2012). We estimate C[2] (τ ) of the
transmission lines using the conductor type and geometry, and of generators using publicly available data
(EIA 2019). We estimate D[2] (τ ) at the loads using per capita consumption rates (Birchfield et al. 2017).
91
[2] [2]
We also incorporate the dependency of G[2] on G[1] . We modifyC[2] (τ ) using MC Q[1] (τ ) , where MC (·)
is a vector of identity functions, i.e., for each realization, it would be 0 if the respective component in G[1]
fails and 1 otherwise.
To estimate S[2] (τ ), we solve the governing power flow differential equations using the Python package
PyPSA (Brown et al. 2017). The solution approach discretizes the governing differential equations and defines
a set of algebraic equations (Glover et al. 2012). The power flow analysis allows us to incorporate the effects
of voltage collapse in the estimate of the supply measure, where S[2] (τ ) → 0 at load buses whose voltage falls
out of the range [0.9, 1.1] per unit. To model the functionality of the electric power infrastructure, we use
Q0[2] (τ ) = S0[2] (τ ) D0[2] (τ )
1{D0[2] (τ )0} . The estimates of Q0[2] (τ ) are only affected by the critical
repair projects, defined earlier.
4.5.3
Recovery modeling of potable water infrastructure
We define G[3] and G[4] as the structural and hydraulic flow networks of the potable water infrastructure.
The components of G[3] that are vulnerable to seismic excitations are the pumping stations, booster pumps,
tanks, and pipelines. To estimate the seismic damage to the vulnerable components, we use fragility curves
and repair rate curves together with the earthquake PGA and Peak Ground Velocity (PGV). For the pumping stations, we obtain the parameters of the fragility curve from a field inspection (Hwang et al. 1998).
Furthermore, we model the location and number of leaks/breaks in a pipeline using a Poisson process (ALA
2001); for a pipeline of length le , we can write the probability mass function for the number of leaks/breaks,
N (le ), as
P [N (le ) = m] =
(λe le )m −λe le
,
m! e
for m = 0, 1, 2, . . .
(4.15)
where m is the realization of N (le ); λe is the repair rate (i.e., number of leaks/breaks per unit length).
To model physical recovery, we define recovery zones for damaged pipelines based on multiple attributes.
We first use the k-means clustering algorithm (Hastie et al. 2009) to group the pipelines into 8 different zones
based on the geographic proximity. We further classify the pipelines in each of the 8 geographic zones into
industrial, open, residential, and commercial zones based on the land-use. Additionally, we define exclusive
zones for the main pipelines based on their diameter to reach 18 different recovery zones in total. Given the
small number and high criticality of the damaged pumping stations, booster pumps, and tanks, we assign
separate crews for the recovery of these components, where the respective recovery durations in this example
are obtained from HAZUS-MH Technical Manual (FEMA 2014).
Figure 4.9 shows the recovery schedule for the repair of damaged pipelines. The description of the figure
92
is similar to that presented for Figure 4.2. Each recovery team, working in a single zone, consists of four
sets of crews as follows: 1) the earthwork crews, that perform excavation and backfill; 2) the shoring crews
that install temporary shoring systems to support the sides of excavated trenches; 3) the repair crews, that
perform the repair of breaks and seal of leaks; and 4) the testing crews, that perform final inspection and
certify the recovery completion.
Excav.
Repair
breaks
Shore
Excav.
Shore
Excav.
Shore
Seal
leaks
Repair
breaks
Repair
breaks
Test
Seal
leaks
Seal
leaks
Fill
Test
Fill
Test
Fill
Figure 4.9: Recovery schedule for the repair of damaged water pipelines in a recovery zone
To estimate the duration of individual recovery activities, Table 4.3 summarizes the productivities derived
from RS Means (Means 2016) and adjusted using Eq. (4.1) with values of ω = 0.83 and εκ = 0.1 for all
κ (Ibbs and Sun 2017). To account for the specific condition of the post-disaster recovery, we increase the
working hours per day to 16 hours (PlaNYC 2014). The shorter working hours with respect to that of the
power infrastructure is due to the hazardous working conditions of underground construction and a longer
project completion time. Table 4.4 shows the formation of the recovery teams for pipeline repairs. Each
team consists of 4 earthwork crews, 3 shoring crews, 4 repairs crews, and 1 test crew. The three teams work
in parallel with at most 1 team working in a single zone. The earthwork crews perform excavation and fill,
shoring crews perform shoring, repair crews repair breaks and seal leaks, and test crews perform final testing.
93
Table 4.3: Productivity for the recovery activities to repair damaged water pipelines
Activity
Unit
Mean productivity
[units/crew/8 hrs.]
−
−
Number
−
−
−
Excavation
Cubic yard
300
Shoring
Square foot
330
Repair leaks
Number
4
Seal leaks
Number
16
Testing
Number
4
Backfill
Cubic yard
1, 500
−
−
Inspection
Bidding
Mobilization
Demobilization
Table 4.4: Formation of the recovery teams for the repair of damaged water pipelines
Team
Earthwork
Shoring
Repair
Test
crews
crews
crews
crews
1
4
3
4
4
2
4
3
4
4
3
4
3
4
4
To model the service recovery, we need to estimate the functionality of the potable water infrastructure.
The functionality is terms of Q[4] (τ ), which is obtained from the hydraulic flow analysis of G[4] for each
time τ . The components of G[4] are junctions, tanks, reservoirs, pipelines, booster pumps, and pumping
stations. The vector x[4] (τ ) contain the control state variables like pressure and velocity, and non-control
state variables like roughness index and pipes’ geometry. Also, C[4] (τ ) and D[4] (τ ) are in terms of volumetric
flow. For example, we estimate the discharge capacity of pipelines, using the section area and design velocity,
and the corresponding discharge demand based upon consumption rates for residential, commercial, and
industrial sectors. We also incorporate the dependency of G[4] on G[3] and G[2] . We modify C[4] (τ ) using
[4] [4]
MC Q[2] (τ ) , Q[3] (τ ) , where each element of MC (·) is a product of the supporting elements of Q[3] (τ )
and Q[2] (τ ).
To estimate S[4] (τ ), we solve the governing hydraulic flow equations using the Python package WNTR
94
(Klise et al. 2017). The estimate of S[4] (τ ) is based on a pressure-dependent flow analysis and when the
pressure at a delivery node drops below a threshold, the estimate of S[4] (τ ) at that delivery node becomes
zero (Wagner et al. 1988). The solution approach is based on pseudo-steady analyses, taking advantage of
differences between the time scales of D[4] (τ ) variations and flow dynamics, i.e., WNTR solves a system of
coupled time-invariant equations whose boundary conditions change with time. To model the functionality
of the potable water infrastructure, we use Q0[4] (τ ) = S0[4] (τ ) D0[4] (τ )
1{D0[4] (τ )0} .
4.5.4
Resilience analysis
Using the approach in Section 3, we define the recovery curve as
Pnα
Q (τ ) =
[2]
α=1
[2]
[2]
[4]
[2]
[4]
[4]
wα Qα (τ ) wα Qα (τ )
,
Pnα
[2] [4]
α=1 wα wα
(4.16)
[4]
where wα and wα are the assigned weights of Qα (τ ) and Qα (τ ) for the recovery cell Ωα . For each
[4]
[2]
n
α
, we use a weighted average, where
Ωα , we define Qα (τ ) = Qα (τ ) Qα (τ ). To aggregate over {Ωα }α=1
[2]
[4]
the weight of each Ωα is wα wα , and the individual weights can be calculated based on the demands
Pnα
Pnα
[k]
[k]
[2] [4]
[k]
Dα (τ ). The scaling factor α=1
wα wα in the denominator ensures that
alone as wα = Dα (τ ) / α=1
Q (τ ) ∈ [0, 1]. . However, there may exist strategic locations such as hospitals, police stations, or dependent
components of other infrastructure. The restoration of infrastructure services to strategic locations may be a
higher priority than what is obtained solely based on their contribution to the demand. We can synthetically
increase the weights for the corresponding recovery cells to provide priority to any strategic locations.
Infrastructure with redundancy are likely to restore their full functionality soon after a disruption, while
they may remain in a highly damaged and vulnerable state (i.e., low reliability level). This pattern has been
observed, for example, in Los Angeles water services recovery following the 1994 Northridge earthquake.
The high level of generation and transmission redundancy of the Los Angeles water infrastructure enabled
restoring the pre-disaster functionality in less than 2 weeks, whereas the pre-disaster reliability was not
restored until about 9 years after the earthquake (Davis 2014).
So, to capture the recovery of infrastructure reliability, we also quantify the recovery progression in terms
of the percentage of completion of total repair/replacement required. In this example, there are redundancies
in electric power infrastructure (see Figure 4.4); thus, we consider the continued repair/replacement of
damaged components after the recovery of the infrastructure functionality. However, we reduce the working
hours of the non-critical repairs, starting after the critical repairs, to regular 8 hours per day and consider
only a single recovery team for each of the MLGW and TVA operated infrastructure.
95
4.5.5
Resilience optimization
The scenario earthquake causes damage to the components of the electric power infrastructure in 17
out 36 zones managed by MLGW, and all the 18 zones of the potable water infrastructure. The op
timization problem aims to set the priorities of the recovery zones in Z = z[1] , z[2] , z[3] , z[4] , where
z[1] = z[2] = zσ(1) , . . . , zσ(17) is the vector of recovery zones for the two networks of the electric power
infrastructure (i.e., structural and power flow networks), and z[3] = z[4] = zσ(1) , . . . , zσ(18) is the vector of
recovery zones for the two networks of the potable water infrastructure (i.e., structural and hydraulic flow
networks). As a comparison, we also model the recovery of disrupted services under current recovery practice. Specifically, we develop representative recovery schedules for the electric power infrastructure following
the policies outlined by MLGW (MLGW 2017a). The current recovery policy prioritizes recovery zones in
the following order: 1) zones with damaged substations along with primary circuits serving hospitals, water
pumping stations, and sewer treatment plants; 2) zones with damaged circuits associated with the greatest
number of customers without power; 3) zones with damaged components in areas that restore power to the
most number of customers per repair; and 4) zones with individual service lines from transformers on a pole
to customers house. For the potable water infrastructure, we develop a recovery schedule with a prioritization based on functional and land use motivation. This schedule is used as a current recovery practice.
We prioritize recovery zones in the following order: 1) mainlines, 2) zones with damaged components in
residential and commercial areas, 3) zones with damaged components in industrial areas, and 4) zones with
damaged components in open areas.
The focus of this example is to illustrate the ability of the proposed formulation to handle large scale
optimization problems. We assume that the recovery crews are hired for the entire recovery duration. With
this assumption, the recovery cost in Eq. 4.12 is minimized with the total recovery duration. Since the
resilience metric ρ [Q (τ, Z)] favors fast recovery schedules, in this example, it suffices to consider ρ [Q (τ, Z)]
as the sole objective of the optimization problem.
To solve the optimization problem in Eq. 4.11, we implement a Genetic Algorithm (GA) (Adeli and
Hung 1994). The algorithm starts with a randomly generated set of candidate solutions (i.e., population).
We manually include the current recovery strategy as one of the candidates so that every new generation
can lead to an improvement. In the current example, {Zi : i = 1, . . . , npop } represents the set of candidates
and Zi is one such candidates. The algorithm then evaluates the values of the objectives for each Zi and
ranks them based on prescribed rules. In the current example, the ranking is based solely on the value of the
objective ρ [Q (τ, Zi )]. A new set of candidate solutions are obtained by using modifying operations called
crossover and mutation on a selected portion of candidates (Kellegöz et al. 2008). The modified solutions,
96
the best solutions in the current population, and a certain percentage of new randomly generated solutions
then make up the next generation of candidates. The selection-modification process is repeated until a
convergence criterion is met (i.e., 100 generations without an improvement in ρ [Q (τ, Zi )].)
We also formulate the nested optimization problems for the physical and service recovery modeling, as
discussed in Section 4. Specifically, we develop minimum-duration recovery schedules at the local scale, using
the productivities in Tables 4.1 and 4.3, and recovery teams in Tables 4.2 and 4.4. For G[2] , we use a linear
optimized power flow for power generation dispatch, followed by a nonlinear check with Newton-Raphson
power flow solver (Brown et al. 2017); for G[4] , we use the pressure-driven demand analysis (Klise et al.
2017).
4.5.6
Results and discussion
The optimization took 12 hours of runtime, using parallel processing on a personal computer (Intel(R)
Xeon(R) CPU E31245 @ 3.30 GHz, 4 Cores, 8 Logical Processors, with 24.00 GB RAM).
[2]
Figure 4.10 shows the estimates of Qα (τ ) in Shelby County for a period of 40 hours following the scenario
earthquake. The results are according to the current (Figure 4.10a) and optimized (Figure 4.10b) recovery
[2]
schedules. In Figure 4.10, we observe that Qα (τ ) shows a fluctuating pattern for some Ωα ’s; this is due
to the redistribution of loads on the operating buses that results in voltage collapse. Comparing the two
plots, we can observe that the optimized schedule significantly improves the recovery of the electric power
infrastructure. Specifically, the optimized schedule Zopt results in 30.2% improvement in ρ [Q (τ, ·)], where
ρ [Q (τ, Zopt )] = 18.1 hours, compared to ρ [Q (τ, Zcur )] = 26.5 hours for the current recovery practice Zcur .
[4]
[4]
We obtain Q (τ ) for the electric power infrastructure alone using Eq. (4.16) with wα = 1 and Qα (τ ) = 1
for all α = 1, . . . , nα . The optimized recovery schedule also reduces the duration of power outage for pumping
stations and hospitals in Shelby County, which are the first recovery priority in Zcur . This observation
highlights the significance of modeling both the physical connectivity and flow analysis in developing the
recovery schedule. Though the disrupted services recover quickly, the complete recovery of the infrastructure
reliability continues for another ≈ 64 days for the MLGW non-critical repairs and ≈ 6 days for the TVA
non-critical repairs. Note that the non-critical repairs are not included in the optimization.
97
[2]
[2]
1
1
0.8
0.8
0.6
0.6
Ωα
Qα (τ )
Ωα
Qα (τ )
0.4
0.4
0.2
0
8
16 24 32 40
τ [hr]
0.2
0
0
(a) Current practice
8
16 24 32 40
τ [hr]
0
(b) Optimized schedule
Figure 4.10: Predicted performance measure for the electric power infrastructure
Figure 4.11 shows the estimates of Qα (τ ) in Shelby County for a period of 240 hours (i.e., 10 days)
following the scenario earthquake. The results are according to the current (Figure 4.11a) and optimized
(Figure 4.11b) recovery schedules. The periodic fluctuation of Qα (τ )’s in the figure is due to the hourly
[4]
[2]
variation in the water demand. While Qα (τ ) controls the trend of Qα (τ ) until τ ≈ 36 hours, Qα (τ )
influences the later stages of the recovery. Specifically, the optimized schedule results in 5% improvement
in ρ [Q (τ, ·)], where ρ [Q (τ, Zopt )] = 57.6 hours, compared to ρ [Q (τ, Zcur )] = 60.6 hours. The significance
of the optimized schedule becomes clearer when we note that for Shelby County with 1, 000, 000 population,
the 3-hour improvement in ρ [Q (τ, ·)] translates to approximately 1, 500, 000 people-hours more access to
essential resources.
1
1
0.8
0.8
0.6
0.6
Ωα
Qα (τ )
Ωα
Qα (τ )
0.4
0.4
0.2
0
48 96 144 192 240
τ [hr]
0.2
0
0
(a) Current practice
48 96 144 192 240
τ [hr]
0
(b) Optimized schedule
Figure 4.11: Predicted aggregate performance measure
Figure 4.12 summarizes the results of resilience optimization in terms of the temporal centers of resilience.
98
[2]
[4]
Specifically, Figure 4.12(a) shows the demand based weights, is wα wα for all Ωα ’s and Figure 4.12(b) shows
∆ρ [Qα (τ )] = ρ [Qα (τ, Zcur )]−ρ [Qα (τ, Zopt )] for all Ωα ’s. The results in Figure 4.12 indicate improvements
in the values of ρ [Qα (τ, ·)] for high demand areas.
[2]
[4]
wα wα [%]
< 0.001
0.001-0.01
0.01-0.1
0.1-1
>1
(a) Spatial distribution of demand
∆ρ [Qα (τ )] [hrs.]
< -10
-10 to -1
-1 to 1
1 to 10
> 10
(b) Improvement in resilience in terms of reduction in temporal center of resilience
Figure 4.12: Results of resilience optimization in terms of the temporal resilience of recovery cells
Figure 4.13 shows the estimates of spatial resilience metrics according to the current and optimized
recovery schedules. In the top plots, the red dots are the estimates of ρQ (τ̂ ), whereas the contours show
the spread of ρQ (τ̂ ) using kernel density estimation, a non-parametric approach to estimate the probability
density function (Hastie et al. 2009). The bottom plots show the estimate of d ρQ (τ̂ ) , ρ∗Q (τ̂ ) for all
τ̂ ∈ [0, TR ]. The estimates of dρ are also shown with dashed lines. The results indicate that the optimized
recovery schedule could reduce the spatial disparity of recovery across Shelby County; though, reducing the
spatial disparity was not an objective of the optimization problem in this example.
99
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !
!
! !!
!!
!! !
!
!
!
!
!
!
! !
!
!!!!!
!
!!
!
!
!
!
!!
!
!!
!
!!
!
!
h
!
! !
!
!
!
!!
!!
!
!
!! ! !! !!
! !
! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!!
!!
!
!! !
!
!
!
! !!!
!
!
!
!!
!
!
!!
!
!
!!
! ! !!
! !
!
!
!
!
!
!
!
!
!
! !
!
!!
!
!
!
!
!
!
!
! !!
!!
!
!!
!
!
! !!!!
!
! !!
h
!
!
!
!
!
!
!
40
i
d ρQ (τ̂ ) , ρ∗Q (τ̂ ) [km]
! !
!
Centroid
ρQ (τ̂ )
30
20
6.5
10
0
50
6.1
100
150
200
0
50
100
150
200
h
0
τ̂ [hr.]
τ̂ [hr.]
(a) Current practice
(b) Optimized practice
Figure 4.13: Improvement in resilience in terms of reduction in spatial disparity
4.6
Conclusions
This chapter proposed a rigorous mathematical formulation to optimize the resilience of large-scale infrastructure. The novelties of the proposed formulation are 1) a multi-scale model of the recovery process; 2)
resilience metrics to capture the temporal and spatial variations of the recovery process; and 3) a computationally efficient optimization problem to improve regional resilience. To manage the recovery of infrastructure spread over large geographic areas, the proposed multi-scale model partitions damaged infrastructure
into several recovery zones, prioritizes the recovery zones, and develops detailed schedules for intra-zonal
recovery activities. This model favors practical and easily manageable recovery schedules. For a developed
recovery schedule, high-fidelity flow analyses are performed to model a recovery surface for the region of
interest in terms of infrastructure functionality. The proposed resilience metrics then quantify the resilience
associated with the developed recovery surface. The multi-objective optimization integrates multi-scale recovery modeling, high-fidelity flow analyses, and resilience metrics to recommend recovery schedules that
improve regional resilience, while minimizing the recovery cost.
The proposed formulation enables developing realistic recovery schedules for large scale interdependent
infrastructure, while maintaining the computational feasibility. The temporal and spatial resilience metrics
associated with the developed recovery surface can be used to promote rapid recovery that also reduces
the spatial disparity of the recovery progression. Furthermore, the separate treatment of monetary cost
and resilience metrics in the optimization problem eliminates the issues of monetizing the consequences of
disrupted services. The proposed formulation rigorously models all the relevant aspects of infrastructure
100
resilience analysis; hence, provides the prerequisites for comprehensive uncertainty quantification in infrastructure resilience analysis. The uncertainty quantification remains a subject for future research.
The proposed formulation was illustrated for the resilience optimization of large-scale interdependent
infrastructure. It was observed that the optimized recovery schedule reduced the power outage duration
for pumping stations and hospitals, though these were the first priorities in the current recovery practice;
indicating that the sequence of physical recovery does not imply the same sequence of functionality recovery.
This observation underscores the significance of using high-fidelity flow analyses for functionality recovery.
It was also observed that the electric power infrastructure recovered rapidly compared to the potable water
infrastructure. This observation explains the differences in the recovery time scales of different infrastructure;
thus, the availability of different infrastructure resources may dominate the values of regional resilience at the
corresponding time scales. Furthermore, the optimized recovery schedule specifically improved the resilience
of high demand areas and reduced the spatial disparity of recovery progression across the region of interest.
101
Chapter 5
Modeling Time-varying Reliability
and Resilience of Deteriorating
Infrastructure
5.1
Introduction
The state of infrastructure changes over time due to various deterioration processes as well as maintenance
and recovery plans. The instantaneous state of infrastructure governs the spatial and temporal extent of
disruptions to essential services due to the occurrence of extreme events. However, monitoring the state of
deteriorating infrastructure is generally challenging, and even more so in buried infrastructure like water
and gas pipelines (Kleiner et al. 2006a,b). Inadequate maintenance and recovery preparedness due to the
lack of information about infrastructure deterioration may result in hazard consequences that go far beyond
economic losses (Kabir et al. 2018). Accurate predictions of impacts a given hazard might have upon
infrastructure is thus crucial to risk management. Effective risk management strategies require models to
predict the 1) time-varying state of infrastructure, 2) hazard-induced physical damages to infrastructure
components, and 3) physical and service recovery of the damaged infrastructure.
The increasing attention to community resilience has led to the growing number of publications related to
the performance modeling of infrastructure subject to extreme events. A large body of literature has focused
on modeling the physical damage to infrastructure components due to extreme events like earthquakes, floods,
and hurricanes. The current literature includes various models for reliability and functionality analysis of
infrastructure that predict the connectivity and operation state of infrastructure in the aftermath of extreme
events (e.g., Guidotti et al. 2019; Bocchini et al. 2012; Shinozuka et al. 2003; Cho et al. 2003; Fragiadakis
and Christodoulou 2014). However, the existing models often do not consider the effects of deterioration
processes, maintenance plans, or varying environmental conditions on spatially distributed infrastructure
components. The relatively fewer publications that consider such spatio-temporal changes generally look
at individual components rather than modeling the state of infrastructure as a system of interconnected
components (e.g., Bastidas-Arteaga et al. 2009; Kleiner et al. 2004; Kleiner and Rajani 2001; Mahmoodian
102
and Alani 2014; St. Clair and Sinha 2012; Straub 2009; Fu et al. 2019). Resilience analysis further requires
quantifying the ability of infrastructure to recover after such extreme events. The literature related to the
recovery modeling of infrastructure is diversified depending on the details of recovery scheduling, the fidelity
of infrastructure models, and recovery objectives (e.g., Gardoni 2019; Nayak and Turnquist 2016; Xu et al.
2019; González et al. 2016; Cavdaroglu et al. 2013). Despite advances in different aspects of infrastructure
performance modeling, to the best of our knowledge, there has been no work in the literature that integrates
all the relevant processes discussed above into a unified formulation.
This chapter develops a novel formulation to model the time-varying resilience of deteriorating infrastructure for the first time. We explain the general formulation with a focus on water pipelines as a critical case
in which deterioration grows mostly undetectable until extensively developed. The proposed formulation has
a hierarchical structure with three primary levels. First, we develop stochastic models for the evolution of
state variables that are the physical characteristics of infrastructure components like the geometry, boundary
conditions, and material properties of water pipelines. These stochastic models capture the effects of external
drivers, being gradual deterioration, shock occurrences, or maintenance, on the state variables. Second, we
develop the mathematical models of infrastructure to predict their time-varying reliability and functionality
subject to extreme events as functions of their state variables. Finally, we define time-varying resilience
measures and use them to quantify the instantaneous ability of deteriorating infrastructure to recover after
disruptions. These measures of resilience capture the temporal and spatial variations of infrastructure ability
to recover. The hierarchical structure of the proposed formulation enables exploiting observational data on
deterioration and recovery. These observational data are often available at the level of state variables; however, the proposed formulation can incorporate such data to improve the prediction capability of models at
the infrastructure level. Furthermore, including the governing physics of each level in the proposed formulation eliminates the need for case-specific observational data and enables customizing the models to emulate
the reality of infrastructure deterioration and recovery. For example, the deterioration and damage models
developed for water pipelines capture the corrosivity of soil in which the pipes are buried, the geometry
and material properties of the pipes, hydraulic flow properties, and hazard intensity measures. Likewise,
the recovery model consists of a detailed schedule for the repair or replacement of damaged pipes while
considering the required crews, resources, and other scheduling constraints, as well as high-fidelity hydraulic
flow analyses. As a numerical illustration, we model the time-varying resilience of the deteriorating potable
water infrastructure of the city of Seaside in Oregon, U.S. and explore the effects of different agents on the
time-varying resilience estimates.
The rest of the chapter includes five sections. Section 5.2 details the selected models for the evolution of
the state variables subject to deterioration and recovery processes. Section 5.3 proposes the novel, unified
103
mathematical formulation for modeling the time-varying physical and service performance of infrastructure.
Section 5.4 discusses the proposed time-varying resilience measures. Section 5.5 presents the numerical
example. Finally, the last section summarizes the contributions of the chapter and draws some conclusions.
5.2
Modeling Time-varying State Variables
State variables are the building blocks of the proposed mathematical formulation for infrastructure.
The state of infrastructure varies with time as deterioration processes and recovery activities affect the
state variables of the infrastructure. The external stressors that drive infrastructure deterioration generally
consist of harsh environmental conditions and extreme events (Jia and Gardoni 2018), whereas the recovery
of infrastructure is a controlled process that is a function of a developed recovery schedule. We write the set
of all external drivers Z (t) in a compact form as
Z (t) = {E (t) , IM (t) , M (t)}
(5.1)
where E (t) is the vector of environmental conditions; IM (t) is the vector of shocks’ intensity measures;
and M (t) is the vector of recovery activities. The vectors E (t) and IM (t) generally vary with time due
to, for example, seasonality and climate change, whereas M (t) may vary due to the planners’ decision to
implement a specific recovery schedule for damaged or deteriorated infrastructure.
Let Xi (t) = [Xi,1 (t) , . . . , Xi,d (t)] denote the vector of state variables for the ith component of a given
infrastructure at time t . Mathematically, we can write Xi (t) as
t
Xi (t) = Xi0 +
Ẋi (s) ds
(5.2)
0
where Xi0 = Xi (t = 0) is the vector of state variables at a reference time t = 0 and Ẋi (s) is the rate of
state change at time s . Given that the above integral exists, we develop a state-dependent model for Ẋi (s)
as (Jia and Gardoni 2018)
Ẋi (s) = Ẋi [s, Xi (s) , Z (s) , ΘXi ]
(5.3)
where ΘXi is the vector of model parameters. The expression represents the dependence of Ẋi (s) on
the current estimates of the state variables Xi (s) and active external drivers Z (s) . The models for Ẋi (s)
generally take several forms depending on the life-cycle phase of a component and the dominating driver
during that phase. In particular, during the regular operation, the effects of continuous deterioration due
104
to E (t) dominate, during the occurrence of an extreme event, the effects of shock deterioration due to
IM (t) dominate, whereas during the preventive or reactive maintenance or recovery, the effects of recovery
activities due to M (t) dominate. In Sections 5.2.1 and 5.2.2, we present the specific formulations to model
the evolution of the state variables under the deterioration and recovery processes.
5.2.1
Deterioration process
A proper framework for the evolution of Xi (t) should 1) account for multiple deterioration processes
affecting the system and 2) account for the possible interactions between the different processes. The
formulation proposed by Jia and Gardoni (2018) addresses both aspects, and it is hereby summarized. At
time t , the rate of state change on component i due to the pth deterioration process, Ẋi,p (t), can be
expressed as
Ẋi,p (t) = Ẋi,p [t, Xi (t) , E (t) , IM (t) , ΘXi ]
(5.4)
The formulation in Eq. 5.4 incorporates the interaction between the evolution of multiple state variables
by making the rate of change at time t dependent on the whole vector of state variables Xi (t). The total
rate of change Ẋi (t) for the ith component due to a total of P deterioration processes can be written as the
sum of the rates associated to the individual processes
Ẋi (t) =
P
X
Ẋi,p [t, Xi (t) , E (t) , IM (t) , ΘXi ]
(5.5)
p=1
Different forms for the deterioration process in Eq. 5.5 have been proposed in literature. For example,
Jia and Gardoni (2018) separate the effect of gradual deterioration processes from the effects of shock
deterioration processes, while Iannacone and Gardoni (2019) incorporate gradual and shock deterioration in
a unified formulation that uses stochastic differential equations.
Deterioration processes affecting water infrastructure are generally a function of operational conditions
and of the corrosivity of the soil, which affect the evolution of the state variables defining the properties of
both the segments and the joints. We select the following state-dependent formulation for the mth relevant,
time-varying state variable of the ith component
Ẋi,m (t) = θ1,mi Xi,m (t) + θ2,mi t + θ3,mi
(5.6)
where θ m = [θ1,mi , θ2,mi , θ3,mi ] is the vector of unknown parameters defining the intensity of the deterioration, typically a function of soil properties and service conditions. Such parameters can be selected
105
based on the results of previous studies and/or results from Non-Destructive Testing and Structural Health
Monitoring, should these procedures be performed on the system.
For the segments, we select the length of the deepest pit on the segment ds (t) as the relevant time-varying
state variable. We write the governing differential equation for ds (t) as
d˙s (t) = θ1,1s ds (t) + θ2,1s t + θ3,1s
(5.7)
Solving Eq. 5.7with the initial condition d˙s (t) = 0 , we obtain the time-varying state variable ds (t) as
θ2,1s
ds (t) = −
t−
θ1,1s
θ2,1s
θ3,1s
+
2
θ1,1s
θ1,1s
!
1 − eθ1,1 t
(5.8)
where θ3,1s (= d˙s (0)) is the maximum corrosion rate and (−θ2,1s/θ1,1s ) (= limt→∞ d˙s (t)) is the minimum
corrosion rate. Eq. 5.8 is consistent with typical exponential models that can be found in the literature for
the evolution of the deepest pit (Rajani and Tesfamariam 2007). The values of θ1,1s , θ2,1s and θ3,1s in Eqs.
5.7 and 5.8 can be derived from Rajani and Tesfamariam (2007).
For the joints, we select the tensile strength of the rubber ft (t) and the maximum pull-out force Pmax (t)
as the relevant time-varying state variable for the capacity of the joints. The evolution of the mechanical
properties of different types of rubber has been thoroughly investigated in a 40-yr long study by Brown and
Butler (2000), which reported that compounds of rubber typically used for pipeline joints (e.g., neoprene
rubber) do not experience any decay of their tensile strength in low corrosivity conditions. A linear decay
is instead observed in medium and high corrosivity conditions, respectively. Based on these findings, we
assume a constant corrosion rate for the joints and write the governing differential equation for ft (t) and
Pmax (t) as
f˙t,j (t) = θ3,1j
(5.9)
Ṗmax,j (t) = θ3,2j
(5.10)
where θ3,1j and θ3,2j are the corrosion rates. Solving Eqs. 5.9 and 5.10 with the initial conditions that
ft,j (0) = ft,0 and Pmax,j (0) = Pmax0 , we obtain the following linear models:
ft,j (t) = ft0 + θ3,1j t
106
(5.11)
Pmax,j (t) = Pmax0 + θ3,2j t
(5.12)
The value of θ3,1j and θ3,2j can be calibrated based on the findings in Brown and Butler (2000).
5.2.2
Recovery process
When the damaged infrastructure undergoes recovery, the state variables of its components evolve due to
the completion of the scheduled recovery activities in M (t) . If the recovery of a component i requires a set
of recovery activities Ai , then at any time t , we can write Mi (t) ∈ P (Ai ) , where Mi (t) represents the set
of completed recovery activities for component i and P (·) is the powerset of the argument. This construction
results in a stochastic jump process model for the recovery of X (t) , where the jump process is a class of
stochastic processes that have discrete (random) movements, called jumps, with random arrival times. We
develop a detailed recovery schedule for the whole infrastructure that enables modeling the random arrival
times of the jumps in the stochastic jump processes of X (t) . We then model the random size of the jumps
that capture the effects of M (t) on the state variables X (t) .
Developing a detailed schedule for the recovery of large-scale systems with many components like civil
infrastructure is a daunting task. The computational complexity of the scheduling problem rapidly increases
with the number of activities required for the recovery of infrastructure components. The geographical
distance of working sites for different components further increases the complexity of developing a realistic
recovery schedule that is feasible to implement. Following Sharma et al. (2020b), we use a multiscale approach
to develop the recovery schedule that allows us to overcome the above challenges.
For a given infrastructure, we partition the damaged components into several recovery zones, prioritize
the recovery zones, and develop detailed schedules for the recovery activities in each zone. Figure 5.1(a) shows
a schematic example of the recovery zones in a simplified representation of potable water infrastructure. In
this example, we define two recovery zones based on the functional hierarchy of the components, where one
zone is for the mainline and the other zone is for the two distribution pipes. In the realistic examples of
potable water infrastructure, one may define the recovery zones based on multiple attributes, including the
geographic proximity of components, pressure zones, and land use.
107
Zone 1 (mainline)
Zone 2 (distribution)
Pumping station
Industrial consumer
Residential consumer
(a) Schematic of the infrastructure
Pump
Ksoil
Es
Kj
(b) Structural network
Delivery node
Source
Valve
Pump
(c) Hydraulic flow network
Figure 5.1: Schematic of potable water infrastructure modeling
Figure 5.2 explains the multiscale approach for the recovery of damaged pipelines. In this example, the
recovery schedule consists of two hierarchical scales called the zonal and local scales. The diagram on the
left shows the prioritization of the recovery zones, where individual teams can only work in a single zone at
a time. There are also a set of non-repetitive activities that are common to the entire recovery project (i.e.,
inspection, bidding, mobilization, and demobilization). The detail on the right provides the set of recovery
activities that need to be performed for each pipe at the local scale within a recovery zone. The figure also
shows the precedence constraints between different activities as well as crew availability constraints within
the same activity for different pipes. For example, a crew availability constraint enforces that the excavation
for one pipeline can start only after the earthwork crew finishes the excavation for the preceding pipeline.
Also, an activity precedence constraint enforces that the repair activity for one pipeline can start only after
the shoring activity is finished for the same pipeline.
108
Start
Inspection
Bidding
Infrastructure level
Mobilization
Zonal priorities
Excavation
Team 1
zone zσ(1)
Repair breaks
Shore
Test
Seal leaks
Fill
Team nT
Excavation
Repair breaks
Shore
Seal leaks
Test
Fill
zone zσ(nk )
Excavation
Infrastructure level
Repair breaks
Shore
Seal leaks
Test
Fill
Demobilization
Finish
Figure 5.2: Recovery schedule for the repair of damaged water pipelines
Developing the recovery schedule further requires estimating the duration of individual recovery activities.
To do so, we first estimate the base productivity of each crew from the available construction databases (e.g.,
the RS Means database, Means 2016). We then correct these productivity estimates to consider the specific
condition of post-disaster recovery, using
ηq0 = ω (qκ /qκ,min )
1−εκ
ηq ,
(5.13)
where ηq and ηq0 are the base and corrected productivities of a crew of type κ and size qκ ; qκ,min is
the minimum required size of the crew; ω is a correction term to include the effects of factors like skilled
labor, working hours per day, and weather condition (Sharma et al. 2018a); κ is a small positive constant
to discount the productivity of a congested crew (i.e., when qκ > qκ,min ).
Associated with the developed recovery schedule, we write the stochastic jump process for the vector of
state variables as (Sharma et al. 2018a)
X (τ ) =
∞
X
X (τr,n−1 ) 1{τ ∈[τr,n−1 ,τn,i )}
n=1
+
∞
X
(5.14)
∆X (τs,j ) 1{τ ∈(τr,n−1 ,τr,n ),τs,j ∈(τr,n−1 ,τ )} ,
n,m=1
where Xi (τ ) is the vector of state variables at time τ since the beginning of the recovery tr ( τ = t − tr
); Xi (τr,n ) is the vector of state variables after the recovery of a damaged member like a pipe segment at
time τr,n ; 1{·} is the indicator function; ∆Xi (τs,m ) is the state change due to the occurrence of a disrupting
109
shock during the recovery at time τs,m ∈ (τr,n−1 , τr,n ) .
The random arrival times {τr,n } are functions of the zonal and local scale recovery schedules; thus, we
write τr,n = ξr,z + ξr,l + ξr,n , where ξr,z is the random arrival time of the recovery in zone z ; ξr,l is the
random arrival time of the recovery of component l in zone z with respect to ξr,z ; and ξr,n is the random
arrival time of completing recovery step n of component l in zone z with respect to ξr,l . The estimates of
ξr,z obtain from the zonal scale recovery schedule, whereas the estimates of ξr,l , and ξr,n obtain from the
local scale recovery schedules.
5.3
Modeling Time-varying Performance Measures
Following Sharma and Gardoni (2020), we model infrastructure as a collection of networks. Let
G = G[k] : k = 1, . . . , K denote the collection of all networks required to represent infrastructure. Each
network G[k] = V [k] , E [k] comprises of a set of nodal components V [k] (e.g., water tanks) and a set of line
components E [k] ⊂ V [k] × V [k] (e.g., water pipelines). For example, Figure 5.1 illustrates the mathematical representation of a potable infrastructure. Figure 5.1(a) shows a schematic of the infrastructure that
consists of a pumping station, mainline, distribution lines, junctions, and valves. The mathematical model
of the infrastructure consists of a structural network G[1] (shown in Figure 1b) and a hydraulic flow network
G[2] (shown in Figure 1c), i.e., G = G[1] , G[2] . For a given hazard, G[1] needs to include all the vulnerable
components of the infrastructure. Figure 5.1(b) shows the pump, the pipe segments, and the pipe joints as
the components of G[1] that are vulnerable to seismic hazard. Furthermore, G[2] needs to include all the
components required to perform the hydraulic flow analysis. Figure 5.1(c) shows a flow diagram of G[2] with
a source, pump, junctions, pipes, valves, and delivery nodes. Also, G[2] is dependent on G[1] for providing
structural support.
We characterize each network by a unique set of vectors that define its functional state at any given time.
The set of vectors are the network components’ state variables X[k] (t), capacity measures C[k] (t) , demand
measures D[k] (t) , and supply measures S[k] (t) . The performance modeling of infrastructure builds upon
the time-varying models of X[k] (t), C[k] (t) , D[k] (t), and S[k] (t) for all G[k] ∈ G . Following Sharma and
Gardoni (2020), to the quantify the performance of each G[k] , we define the derived performance measures
Q[k] (t) , like reliability and functionality, as functions of X[k] (t), C[k] (t) , D[k] (t), and S[k] (t).
We account for the interdependencies among the networks using interface functions (Sharma and Gardoni 2020, Sharma et al. 2020). The interface functions for each G[k] capture the combined effects of the
performance of all supporting networks on C[k] (t) and the combined effects of the performance of all supported networks on D[k] (t) . The modified capacity C0[k] (t) and demand D0[k] (t) after accounting for the
110
interdependencies are
C0[k] (t) = C[k] (t) M[k]
C (t) ,
(5.15)
D0[k] (t) = D[k] (t) M[k]
D (t) ,
[k]
[k]
where MC (t) is the vector of interface functions for the capacity and MD (t) is the vector of interface
[k]
functions for the demand. For example, MC (t) modifies the flow capacity of a pipe segment in a hydraulic
flow network if the same pipe segment in the structural network is damaged. These changes in the capacity
and demand, in turn, affect the estimates of S[k] (t) and Q[k] (t). In Sections 5.3.1 and 5.3.2, we present specific formulations of the introduced network characteristics for the structural network G[1] and the hydraulic
flow network G[2] of potable water infrastructure.
5.3.1
Time-varying reliability analysis of the structural network
To model the physical state of the infrastructure (k = 1), we may define the capacity and demand
[1]
measures, using the estimates of Xi (t) for each component in the respective capacity and demand models.
It is then possible to obtain the time-varying reliability of the component by defining the limit state function
(Ditlevsen and Madsen 1996; Gardoni 2017b) as
h
i
h
i
h
i
[1]
[1]
[1]
[1]
[1]
gi t, Xi (t) = Ci t, Xi (t) ; ΘC [1] − Di t, Xi (t) ; ΘD[1]
i
(5.16)
i
[1]
where ΘC [1] and ΘD[1] are the vectors of model parameters relating Xi (t) to the capacity and demand
i
i
of the component, respectively. The fragility for the ith component at time t, Fi (IM, t) , is defined as the
probability that the demand exceeds the capacity for a given intensity measure for the earthquake at time t
, i.e.
n h
i
o
[1]
Fi (IM, t) = P gi t, Xi (t) ≤ 0 |IM
(5.17)
For linear elements, the expected damage is typically expressed in terms of the expected number of
repairs per unit length of the elements. The fragilities obtained from Eq. 5.17 can be used in (Monte Carlo)
simulations directly to obtain the expected number of repairs on the linear elements. However, simulation
for an entire network requires high computational effort and might not be feasible. An alternative option
is to use the fragility curves from Eq. 5.17 to generate physics-based repair rate curves, which quantify the
expected number of repairs per unit length of line.
For example, consider the case of water pipelines composed by nj identical joints and ns identical segments
111
of length ls (which is the most commonly found in practice due to issues related to ease of construction). In
this case, the repair rate curves can be obtained in closed form from the fragility in Eq. 5.17 as
ν (IM, t) =
lu
[Fj (IM, t) + Fs (IM, t)]
ls
(5.18)
where lu is the selected unit length, Fj (IM, t) is the fragility function a generic joint j on the pipeline
and Fs (IM, t) is the fragility function for a generic segment s. A key assumption of Eq. 5.18 is that the
chosen unit length lu is larger than the length of the segments ls . This assumption is typically satisfied as
repair rate curves for water networks are usually expressed as the number of repairs needed per 1, 000 ft or
1 km, both quantities being much larger than the typical length for pipeline segments.
Once the repair rate curves have been obtained, they can be used to generate damage to the network.
Typically, the number of breaks along an element of length l, N (l), is assumed to follow a Poisson distribution
with a rate equal to ν = ν (IM, t) . The probability mass function of N (l) can then be written as
P [N (l) = m] =
(νl)m −νl
,
m! e
for m = 0, 1, 2, . . .
(5.19)
The curves obtained using the proposed formulation can be used as an effective replacement for the
approximate repair rate curves typically used in practice (ALA 2001), which have been obtained from
historical data. Being purely empirical, commonly used curves provide rough estimates for the expected
damage on pipelines. Furthermore, physical parameters are only accounted for with the use of correction
coefficients, and the damage occurring at joints is not separated from the damage occurring on the pipe
segments. This distinction might be of interest particularly for repair operations, which are generally different
for joints and segments.
To estimate the structural demand D[1] (t), we use the model proposed by Iannacone and Gardoni (2018)
for the computation of the demand on segmented pipelines subject to seismic excitation. In this model, the
longitudinal resistance is assumed to be governing the behavior of the pipeline (consistently with the work
of Elhmadi and O’Rourke 1990) and the chosen seismic intensity measure is the ground strain εg . We can
obtain εg either by using state-of-the-art software (e.g., SPEED by Mazzieri et al. 2013) or from maps of
the Peak Ground Velocity P GV , using the Newmark approximation (Newmark 1967)
εg =
P GV
Cs
(5.20)
where Cs is the apparent wave propagation velocity of the surface waves.
We assume that a link of length L is defined as the part of the network between 2 nodes (Figure 5.1b).
112
Each link of the network will be subject to elongation in the surrounding soil ∆L equal to
L
∆L =
→
−
−
y ·→
ε g (y) dy
(5.21)
0
where y is the local coordinate along the link and “·” denotes a vector dot product.
We model the different links as a sequence of beam elements with Young’s modulus Es for the segments
and linear springs of stiffness Kj for the joints. At the two ends of the link, two springs of stiffness Ksoil
are inserted to account for the contribution of the soil properties and the burial depth (see Figure 5.1b).
This proposed simplified formulation agrees with results obtained from finite element models (Iannacone and
Gardoni 2018).
The strain on the segments εs and elongation at the joints ∆uj are measures of the demand for the
elements. Probability distribution functions for both εs and ∆uj can be obtained either by direct simulation
or by using first and second-order approximation (Iannacone and Gardoni 2018). Because the capacity for
the segment is usually expressed in terms of stresses rather than strains, εs must be properly translated into
such terms. According to Rajani et al. (1996) and Rajani and Tesfamariam (2004), the axial stress on the
pipeline σx can be obtained as
σx,s = θ Es εs + θp ps − θT Es αs ∆T
(5.22)
where ps is the internal pressure, ∆T is the temperature differential, αs is the expansion coefficient of
the pipe material, θ , θp and θT are physics-based coefficients and εs is the axial strain on the pipe. The
hoop stress σh,s can instead be obtained as
p
f
w
T
σh,s = σh,s
+ σh,s
+ σh,s
+ σh,s
(5.23)
p
f
w
where σh,s
is the hoop stress due to overburden loads, σh,s
is the result of internal pressure, σh,s
is the
T
bending hoop stress (for partially supported pipelines) and σh,s
is the thermal hoop stress. In this work, only
f
T
the first two terms of Eq. 5.23 are considered, due to σh,s
and σh,s
being situational. Under this assumption,
Eq. 5.23 simplifies to
σh,s =
w
σh,s
+
p
σh,s
= γsoil · depth
3φs
πt2wall,s
!
+ (ps − pe )
φs − twall,s
2twall,s
(5.24)
where where γsoil is the unit weight of the soil, depth is the burial depth, φs is the diameter of the pipe,
twall,s is the thickness of the pipe wall and pe is the external pressure (which can be assumed close to zero
113
for non-confined soil). For more information about this model and the physics-based coefficients θ , θp and
θT , see Rajani et al. (1996) and Rajani and Tesfamariam (2004). Finally, because the failure criterion is
best represented by the distortion energy theory developed by Von Mises, we express the final demand on
the pipeline segment using the Von Mises stress (Mises 1913; Mair 1968):
σV M,s =
q
[1]
2
2 −σ
σx,s
x,s σh,s + σh,s = Ds
(5.25)
The demand on the joint, on the other hand, is best represented by the pull-out force Pj , which can be
expressed using Hooke’s law as
[1]
Pj = Kj ∆uj = Dj
(5.26)
We then estimate the corresponding capacity C[1] (t). The capacity for the segments is generally expressed
in terms of the ultimate stress that the material can sustain. In other words, the Von Mises stress in Eq. 5.25
must be compared with the ultimate stress for the pipeline, usually provided in the material specifications.
This quantity can be modified to account for material deterioration, accounting for the possible presence of
defects along the element, which might reduce the ultimate stress that the pipe segment can sustain. One
possible formulation has been proposed by Rajani and Makar (2000) and later investigated by Sadiq et al.
(2004). In this formulation, the residual ultimate strength of the element is expressed as
θα Kq,s
σur,s (t) =
θβ
h
ds (t)
√
tres,s an
[1]
iθs = Cs
(5.27)
where θα is a constant used in fracture toughness theory, Kq,s is a provisional fracture toughness (in
√
MPa/ m ), ds (t) is the depth of the longest pit on the segment (in mm), tres,s = twall,s − ds (t) is the
θb
residual thickness of the pipeline wall, an is the lateral dimension of the pit, θβ = θa [ds (t) /tres,s ]
is a
geometric factor with empirical constants θa and θb . Because σur,s (t) → ∞ in Eq. 5.27 as ds (t) → 0 , Eq.
5.27 is only valid whenever σur,s (t) < σuin,s , with σuin,s being the ultimate tensile stress of the material
with no defects (obtainable from material specifications).
While different formulations for the capacity of segments have been extensively developed using simplified
models from solid mechanics, capacities for the connecting joints are usually not easily available as they are
extremely specific to the stiffness of the materials being used and to the geometry of the connection. However,
Singhai (1984) provides a formulation for the maximum pull-out force that rubber-gasketed joints in ductile
iron pipelines can sustain. According to this formula, the maximum pull-out force for pristine joints Pmax0
can be expressed as
114
e
Pmax0,j =
−φ
Ag,j − b,j 2 e,j
5 2
[1]
π µEj Ag,j φe,j
= Cj
24
eb,j − φe,j
(5.28)
where µ is the friction coefficient between the gasket and the pipe (typically assumed to be equal to 0.1),
Ej is the elastic modulus of rubber in psi, Ag,j is the diameter of the rubber gasket in inches, φe,j is the
outside pipe diameter (typically different from the nominal diameter φj ) and eb,j is the inside diameter of
the pipe bell in inches. The capacity in Eq. 5.28 can also be modified to account for effects of aging and
deterioration.
5.3.2
Time-varying functionality analysis of the hydraulic flow network
The functionality of potable water infrastructure captures its ability to serve the water demand with
acceptable discharge and pressure. Since G[2] has a direct interface with consumers, its performance Q[2] (t)
captures the functionality of the potable water infrastructure. The vector X[2] (t) contains the control state
variables like the flow pressure and velocity, and non-control state variables like roughness index and pipes’
geometry. The components’ capacity C[2] (t) and demand D[2] (t) are in terms of volumetric flow and as
functions of X[2] (t) . For example, we estimate the discharge capacity of pipelines as a function of their
cross-section area and the flow design velocity, and the corresponding discharge demand based upon the
consumption rates of residential, commercial, and industrial sectors. To translate the physical damage to
pipelines in G[1] into the functionality loss of G[2] , we incorporate the dependency of G[2] on G[1] . Namely,
[2]
we modify C[2] (t) using the interface function M C (t) that introduces leaks in the respective damaged pipes
causing a pressure-dependent loss of transmission capacity. To estimate S[2] (t) , we need to solve a system
of coupled differential equations. For each pipe, we write the transport equations for the balance of mass,
momentum, and energy as (Brouwer et al. 2011)
∂vf /∂y =0
2
∂
ρv
+
p
f
∂ (ρvf )
λ
∂h
+
=−
ρvf |vf | − ρg
∂t
∂y
2φ
∂y
(5.29)
ρvf2 /2 + ρgh + p =constant
where ρ , vf , and p are the water density, velocity, and pressure, respectively; h = h (y) is the elevation
profile of the pipe; the constants λ and g are the Darcy-Weisbach friction factor and the gravitational
acceleration. The boundary conditions of pipelines at junctions combined with the capacities of the water
source(s) and demands at delivery nodes need to satisfy the continuity equation. Mathematically, we write
the continuity equation at a given junction v ∈ V [2] as
115
Sv[2] =
X
[2]
(ρvf A)e −
X
[2]
(ρvf A)e (τ )
(5.30)
e=(v,u):u∈V [2]
e=(u,v):u∈V [2]
[2]
[2]
where Sv is the external mass flux at v ∈ V [2] (i.e., a source or delivery node) and (ρvf A)e is the
incoming mass flux at v from e = (u, v) , and outgoing mass flux at v to e = (v, u) .
Finally, we compute the derived performance measure defined as the fraction of demand served at the
delivery nodes, i.e. Q[2] (t) = S[2] (t) D[2] (τ )
1{D[2] (τ )0} , where
,
and are the element-wise
division, multiplication, and comparison operators.
5.4
Resilience Quantification
Resilience quantification is of interest in terms of the predicted recovery of the infrastructure functionality
given the state of the infrastructure at the time of resilience assessment. Mathematically, we model the
resilience of infrastructure at a given time tr as a function of the predicted recovery surface Q (τ, y ∈ Ω)
for the region of interest Ω, where τ = t − tr and y are the temporal and spatial coordinates. To compute
α
Q (τ, y) , we first partition Ω into tributary areas {Ωα }nα=1
, where Ωα ⊂ Ω is a subregion that is served by
a unique delivery node of G[2] . We then define a map Q[2] (τ ) 7→ Qα (τ ) to construct the recovery surface
Pnα
Q (τ, y) = α=1
Qα (τ ) 1{y∈Ωα } . Accordingly, we can define an aggregate performance measure Q τ, Ω̂
n
o
for any subregion Ω̂ ⊆ Ω as a function of Qα (τ ) : Ωα ∩ Ω̂ 6= ∅ . Following Sharma et al. (2020b), we
quantify resilience associated with Q (τ, y) using a set of temporal and spatial resilience metrics that are the
partial descriptors of Q (τ, y). To capture the effects of deterioration on infrastructure resilience, we propose
instantaneous resilience metrics that generalize the metrics proposed by Sharma et al. (2020b).
The Instantaneous Temporal Center of Resilience ρQ (tr , ŷ) at t = tr and a selected location ŷ ∈ Ω
combines the residual functionality of the infrastructure in the aftermath of a disruption with the predicted
recovery as
TR
ρQ (tr , ŷ) = 0TR
0
τ Q (τ, y = ŷ)
(5.31)
dQ (τ, y = ŷ)
where TR is the predicted time to complete the recovery. Furthermore, the Instantaneous Temporal
Resilience Bandwidth χQ (tr , ŷ) captures the temporal dispersion of the predicted recovery as
v
u TR
2
u
[τ − ρQ (tr , ŷ)] dQ (τ, y = ŷ)
χQ (tr , ŷ) = t 0
TR
dQ (τ, y = ŷ)
0
(5.32)
Remark 1: It follows that one can quantify the infrastructure-level temporal resilience from Eqs. 5.30
116
and 5.31 by replacing Q (τ, y = ŷ) with the recovery curve Q τ, Ω̂ defined for the subregion Ω̂ ⊆ Ω .
We also define the Instantaneous Spatial Center of Resilience ρQ (tr , τ̂ ) that captures the spatial centroid
of the recovery progress at a fixed time during the predicted recovery τ = τ̂ as
y∈Ω
ρQ (tr , τ̂ ) = ydQ (τ̂ , y) dy1 dy2
y∈Ω
dQ (τ̂ , y) dy1 dy2
(5.33)
and the respective Instantaneous Spatial Resilience Bandwidth χQ (tr , τ̂ ) that captures the spatial disparity of the recovery progress at τ = τ̂ as
v
u
2
u
y − ρQ (tr , τ̂ ) 2 dQ (τ̂ , y) dy1 dy2
y∈Ω
t
χQ (tr , τ̂ ) =
dQ (τ̂ , y) dy1 dy2
y∈Ω
(5.34)
where k·k2 is the Euclidean norm.
Consider an idealistic scenario in which the recovery progresses uniformly over the region Ω such that
ρ∗Q (tr , τ̂ ) is the centroid of Ω , and χ∗Q (tr , τ̂ ) is the standard deviation of a uniform distribution over
Ω. The deviations of ρQ (tr , τ̂ ) and χQ (tr , τ̂ ) from the corresponding ρ∗Q (tr , τ̂ ) and χ∗Q (tr , τ̂ ) capture the
spatial non-uniformity of the recovery progress. The spatial resilience metrics can thus promote a spatially
uniform recovery progress by developing a recovery schedule that minimizes the spatial disparity metrics
TR
TR
d[ρQ (tr ,τ̂ ),ρ∗
d[χQ (tr ,τ̂ ),χ∗
Q (tr ,τ̂ )]dτ̂
Q (tr ,τ̂ )]dτ̂
dρ = 0
and dχ = 0
, where d [·, ·] is a distance function (e.g.,
TR
TR
d [a, b] = ka − bk2 ).
Remark 2: The instantaneous resilience metrics are defined such that they account for infrastructure
resilience as displayed by the current state at the time of assessment tr . Specifically, the proposed resilience
metrics capture the impact of deterioration on the immediate loss/reduction of infrastructure functionality
due to an incident shock, as well as on the ability of the infrastructure to recover from the incident shock.
5.5
Resilience Analysis of Deteriorating Water Infrastructure of
Seaside, OR
We illustrate the proposed formulation considering the effect of the deterioration of pipelines on the
time-varying resilience of potable water infrastructure in Seaside, Oregon, United States. The example
illustrates the capability of the proposed formulation to provide actionable insight at a realistic community
scale. The city of Seaside is a small coastal community in Northwestern Oregon and is subject to seismic
hazards originating from the Cascadia Subduction Zone. As a disrupting event, following Guidotti et al.
(2019), we model a scenario earthquake with magnitude 7.0 and epicenter at 35.93◦ N and 89.92◦ W (i.e., 25
117
km South-West of Seaside off the Oregon coast). As explained in Section 5.3.1, the earthquake intensity
measure of interest for the reliability analysis of the pipelines is P GV. We use the ground motion prediction
equations (Boore and Atkinson 2008) to model the spatial variation of the P GV .
5.5.1
Characterization of infrastructure
The potable water infrastructure of Seaside is managed by the City of Seaside Water Department, and
it is designed to serve the permanent population of 6, 100 and a much larger tourist-based population in the
summer. The potable water pipelines include 43.4 miles of water mains from 4” to 24” in diameter. The
model of the potable water infrastructure of Seaside is based on the available data secured from the city
engineers (Guidotti et al. 2019). The data include information on the pipes (length, diameter, material, year
of installation), the main reservoir, main pumping stations, and tanks. We also collect information from
soil surveys required to model the time-varying structural capacities and demands of the pipelines. We use
the Web Soil Survey (WSS) from the United States Department of Agriculture (USDA) for the preliminary
classification of the soils. We identify eight different types of soil based on the descriptions provided by the
Soil Conservation Service of Clatsop County (Smith and Shipman 1998) (see Figure 5.3). We associate a
specific unit weight (γsoil ) to each soil type based on the classification available in the NAVFAC Manual for
Soil Mechanics (NAVFAC 1986) (see Table 5.1). Saturated conditions are assumed for this case study.
Soil Types
Fine Sand
Gravel
Organic Clay
Organic Silt
Silt
Silty Clay
Silty Clay with Gravel
Silty Sand with Gravel
Water
Figure 5.3: Soil classification for Seaside, Oregon
We obtain an estimate of the shear wave velocity by classifying the soils according to the NEHRP soil
profile types (FEMA 2004). The sites range from Class A (Hard Rock) to Class E (Soft Soil), with each
118
class associated with a range of shear wave velocity. The selected values for shear wave velocities are also
shown in Table 5.1.
Table 5.1: Soil Properties
Soil type
Vs
γsoil
Organic Clay
400
103
Organic Silt
600
109
Fine Sand
800
110
Gravel
1200
122.5
Silt
700
108.5
Silty Clay
500
123.5
Silty Clay with Gravel
600
133
Silty Sand with Gravel
1000
122.5
Finally, we obtain a classification of the soil in terms of corrosivity from the Web Soil Survey from the
U.S. Department of Agriculture (NRCS and USDA 2008). The USDA classifies the level of corrosivity as
high, moderate, or low. Figure 5.4 shows such a classification for Seaside.
Corrosivity
Low
Medium
High
Water
Figure 5.4: Soil classification in terms of steel corrosivity for Seaside, Oregon
119
5.5.2
Modeling time-varying state variables
As discussed in Section 5.2, the mathematical modeling of infrastructure starts with collecting the required
information about the state variables and modeling their evolution under the effects of deterioration and
recovery processes. In this example, we focus on the deterioration and recovery of water pipelines due to the
significance of timely detection and repair of damages to buried pipelines. Table 5.2 summarizes the vector
of state variables X[1] associated with the structural network G[1] . The table contains information about
the physical properties of the pipelines and indicates the subset of deteriorating state variables.
120
Table 5.2: State variables for the structural network
Symbol
State variable
Units
Value/Range
φs
Nominal Diameter
in
4 − 24
ls
Segment length
ft
20
Es
Modulus of elasticity of pipes
ksi
24, 000
ν
Poisson’s ratio of pipes
0.28
588(φs = 4)
685(φs = 6)
Kj
Mean axial stiffness of joints
lb/in
1, 558(φs = 8)
1892(φs > 8)
σuin,s
Ultimate tensile strength of pipes
ksi
60
depth
Burial depth
in
40
ps
Design operating pressure
psi
50
Ej
Elastic modulus of rubber (neoprene)
psi
510
ft0
Initial tensile strength of rubber
psi
Kq,s
Fracture toughness
1000
1/2
ksi · ft
0.2626
0.60 (φs ∈ {4, 6})
0.93 (φs ∈ {8, 10})
Ag,j
Diameter of rubber gasket
in
1.26 (φs ∈ {12, 14})
1.60 (φs ∈ {16, 18})
2.00 (φs > 18)
4.80(φs = 4)
6.90(φs = 6)
φe,j
Outside diameter of pipes
in
9.05(φs = 8)
11.1(φs = 10)
1.1φ(φs > 10)
5.64(φs = 4)
7.74(φs = 6)
eb,j
Inside diameter of pipes bell
in
9.98(φs = 8)
12.0(φs = 10)
1.2φ(φs > 10)
ds (t)
Length of deepest pit in segment
in
Time-varying
ft,j (t)
Tensile strength of rubber
psi
Time-varying
Maximum pull-out force of joints
lb
Time-varying
Pmax,j (t)
121
The model parameters for the case study can be found in Table 5.3. The values of θ1,1s , θ2,1s and θ3,1s
have been selected based on the findings of Rajani and Tesfamariam (2007), while the values of θ3,1j and
θ3,2j have been selected based on the findings of Brown and Butler (2000).
Table 5.3: Model parameters for the case study
Parameter
Symbol
Value
Constants for θβ in tensile strength
θa
0.5
equation (Eq. 5.27)
θb
−0.25
θα
10
θs
1
Toughness correction coefficient (Eq.
5.27)
Toughness exponent
Corrosivity
Low
Medium
High
θ1,1s
0.058
0.058
0.058
θ2,1s
0.001218
0.001462
0.001705
θ3,1s
0.5865
0.7038
0.8211
θ3,1j
0
−0.002ft0
−0.005ft0
θ3,2j
0
−0.002Pmax0
−0.005Pmax0
Constants for deterioration models
(Eq. 5.8-5.12)
Next, we model the evolution of X[1] (t) under the recovery process. For each pipe, we update the
estimates of the state variables after completing the scheduled recovery activities. To model X[1] (t) according
to Eq. 5.14, we use the multiscale approach with ten different recovery zones (one mainline, one industrial,
three commercial, and five residential). We prioritize these recovery zones in the following order: 1) mainlines,
2) zones with damaged components in residential and commercial areas in decreasing order of total demand,
and 3) zones with damaged components in industrial areas in decreasing order of total demand. We then
develop local scale recovery schedules (as in Figure 5.2) to model the arrival times {τr,n } (see Eq. 5.14).
To develop the recovery schedules, we estimate the duration of individual recovery activities using the
productivity values derived from RS Means (Means 2016). We then adjust these productivity values using
Eq. 5.13, with values of ω = 0.83 and εκ = 0.1 for all κ (Ibbs and Sun 2017). We further account for the
specific condition of the post-disaster recovery by increasing the working hours per day to 16 hours (PlaNYC
2014).
122
Table 5.4: Productivity for the recovery activities to repair damaged water pipelines
Activity
Unit
Mean productivity
[units/crew/8 hrs.]
−
−
Number
−
−
−
Excavation
Cubic yard
300
Shoring
Square foot
330
Repair leaks
Number
4
Seal leaks
Number
16
Testing
Number
4
Backfill
Cubic yard
1, 500
−
−
Inspection
Bidding
Mobilization
Demobilization
Table 5.5: Formation of the recovery teams for the repair of damaged water pipelines
Team
Earthwork
Shoring
Repair
Test
crews
crews
crews
crews
1
4
3
4
4
2
4
3
4
4
Table 5.5 shows the number of crews in each team working on the recovery of pipelines. The two teams
work in parallel with at most one team working in a single zone. The earthwork crews perform excavation
and fill, shoring crews perform shoring, repair crews repair breaks and seal leaks, and test crews perform
final testing.
5.5.3
Modeling time-varying performance measures
As explained in Section 5.3, the mathematical model of potable water infrastructure consists of a structural network G[1] and a hydraulic flow network G[2] . The deterioration processes and recovery activities
directly impact G[1] and indirectly impact G[2] through its dependency on G[1] . The functionality of the
infrastructure is in terms of the performance of G[2] .
To estimate the seismic damage to the pipelines in G[1] , we use the time varying repair rate curves together
with the Peak Ground Velocity (P GV ). Furthermore, we model the location and number of leaks/breaks
123
in a pipeline using a Poisson process (ALA 2001); for a pipeline of length le , we write the probability mass
function for the number of leaks/breaks, N (le ), as Eq. 5.19.
As discussed in Section 5.3.2, the functionality of the potable water infrastructure is terms of Q[2] (t),
which is obtained from the hydraulic flow analysis of G[2] . We account for the interdependency by modifying
[2] C[2] (t) using the interface function M C Q[1] (t) . We estimate S[2] (t), by solving the governing hydraulic
flow equations (see Eq. 5.30) using the Python package WNTR (Klise et al. 2017). This solution approach for
S[2] (t) uses a pressure-dependent flow analysis that discounts supplied water quantity based on the pressure;
when the calculated pressure at a delivery node drops below a limiting value, the estimate of S[2] (t) at that
delivery node becomes zero (Wagner et al. 1988).
Furthermore, following the discussion in Section 5.4, to quantify the resilience of the potable water
infrastructure at a given tr , we require the recovery surface Q (τ, y ∈ Ω), where Ω corresponds to Seaside,
Snα =1,678
Ωα . The map Q[2] (τ ) 7→
OR. We partition Ω into 1678 non-overlapping tributary areas, i.e., Ω = α=1
Qα (τ ) is such that every location, y ∈ Ω, is served by the nearest delivery node. We also define an aggregated
performance measure for the whole infrastructure as
Q (τ, Ω) =
nαX
=1678
wα Qα (τ )
(5.35)
α=1
P α
where wα = Dα (τ )/ nα=1
Dα (τ ) is the assigned weights to Qα (τ ) for the tributary area Ωα . The definition
of wα ensures that Q (τ, Ω) ∈ [0, 1].
5.5.4
Design of experiments
In this section, we design a set of experiments to systematically explore the role of crucial agents on the
resilience of potable water infrastructure. The design of experiments builds on four main considerations.
First, there is spatial variability in the exposure condition and, hence, in the repair rate of pipelines insofar
as they are distributed over a large geographic area. Second, different pipeline segments usually undergo different time-history of deterioration, maintenance, and recovery and, therefore, have different ages. Third, the
information about the installation times and recovery and maintenance actions about different components
may be of variable quality due to different levels of monitoring and data management. Finally, compromises
in the estimates of likely damages to pipelines, as captured by their repair rates, have different implications
on the reliability, functionality, recovery, and resilience of a given infrastructure.
We design 18 different scenarios to implement the listed considerations. Table 5.6 summarizes the designed
scenarios. The table’s rows capture the role of deterioration and the spatial disparity of the pipelines’ age,
where age is the elapsed time since the last repair or replacement. We consider the pristine, present (in
124
2020), and future (in 2030) state of the infrastructure. The pipelines’ age in the pristine state is uniformly
zeros. However, we use pipelines’ actual (non-uniform) age (see Figure 5.5) and define an equivalent uniform
age for the present and future states. The equivalent age is the weighted average of the pipelines’ actual
age, where the weights are according to the pipelines’ lengths. The columns of Table 5.6 capture the role of
exposure condition and its spatial disparity. The columns consider the actual soil corrosivity and uniform
ones at low, medium, and high levels. Finally, we consider a benchmark scenario representing the current
state of resilience analysis of potable water infrastructure. In the benchmark scenario, we use the ALA repair
rates (ALA 2001) in reliability analysis. The designed scenarios collectively allow us to evaluate the relevant
agents’ role in the resilience analysis of potable water infrastructure in isolation and interaction with others.
Table 5.6: Design of experiments to explore the effects of pipelines’ deterioration, age, and exposure condition
on infrastructure resilience
Soil Corrosivity
Pipelines’ age
Actual
Uniform
Uniform
medium
high
Uniform low
ALA
Scenario ALA
Pristine
Scenario 0
Actual in 2020
Scenario 1
Scenario 5
Scenario 9
Scenario 13
Actual in 2030
Scenario 2
Scenario 6
Scenario 10
Scenario 14
Scenario 3
Scenario 7
Scenario 11
Scenario 15
Scenario 4
Scenario 8
Scenario 12
Scenario 16
Equivalent uniform
in 2020
Equivalent uniform
in 2030
125
Installation year
2000 − 2010
1991 − 2000
1981 − 1990
1971 − 1980
1961 − 1970
≤ 1960
Figure 5.5: Year of installation for pipes
We then perform probabilistic resilience analyses for each of the 18 scenarios summarized in Table 5.6.
The source of uncertainty in the probabilistic analyses is the number of leaks and breaks that occur in
pipeline segments for a given PGV intensity map. We first elaborate the results by focusing on Scenario
ALA as the benchmark, and Scenarios 0-2 as our best estimates of the pristine, present, and future states
of infrastructure based on the available information. We then summarize the same results for the rest of the
designed scenarios to gain insights and draw some conclusions.
5.5.5
Results and discussion
We make the first level of comparison for the scenarios in Section 5.5.4 based on the immediate impact in
terms of structural damage. Figure 5.6 shows the comparison between the repair rate following the seismic
event for Scenarios ALA−0 − 1 − 2. The figure shows that the repair rates provided by ALA is higher than
the repair rates quantified in brand new conditions (Scenario 0), but significantly lower than repair rate for
the other scenarios. Also, the curves from ALA are not able to capture the spatial variability of age and the
soil properties. In particular, the southwestern part of the infrastructure is more affected by the occurrence
of the earthquake due to the higher corrosivity of the soil and the older pipes in this area (Figures 5.5,5.6).
126
Repair rate
≤ 0.001
0.001 − 0.01
0.01 − 0.1
0.1 − 1
1 − 10
> 10
(a)
(b)
(c)
(d)
Figure 5.6: Effects of heterogeneous deterioration due to disparate age and soil corrosivity on the repair
rates of pipelines
We then compare the impacts on recovery of reliability and functionality of the infrastructure for the
different scenarios. Figure 5.7 shows the snapshots of expected infrastructure functionality in terms of Qα
for Scenarios ALA−0 − 1 − 2 at τ values of 1 day, 2 days, 21 days, 28 days, and 35 days, respectively.
We define 3 functionality states based on the range of Qα as interrupted (Qα = 0), partial (Qα ∈ (0, 1))
and fully functional (Qα = 1). The maps in Figure 5.7 show the most likely functionality state for each
Ωα with the shades red, yellow, and blue corresponding to the interrupted, partial and full functionality,
respectively. The plots below each map show the probability mass functions pQα for all Ωα . We observe
that the infrastructure recovers quite rapidly for Scenario ALA and Scenario 0. However, for scenario 1
(2020) and Scenario 2 (2030), the infrastructure fully recovers after 28 days and 35 days, respectively. This
127
observation highlights that 1) the impact on recovery can be amplified due to the variation in repair rates
The relation between loss of functionality is not linear and after certain threshold the deterioration impact
increases exponentially in terms of recovery times; 2) although he damage to the infrastructure as seen in
Figure 5.6 is limited to a specific portion of the infrastructure, the impact on functionality seems widespread
across the whole infrastructure area, which shows the importance of a high fidelity flow analysis for the
functionality assessment; 3) We also see that the a minimal neglected portion of infrastructure in terms of
maintenance action can have drastic effects for the complete infrastructure.
128
ALA
Qα (τ ) = 1
0 < Qα (τ ) < 1
Qα (τ ) = 0
pQα
1
Ωα
Ωα
Ωα
Ωα
Ωα
Ωα
Ωα
Ωα
Ωα
τ = 1 day
Ωα
τ = 2 days
Ωα
τ = 21days
Ωα
τ = 28 days
Scenario 0
0
pQα
1
Scenario 1
0
pQα
1
Scenario 2
0
pQα
1
0
Ωα
τ = 35 days
Figure 5.7: State of the infrastructure at selected times after the occurrence of the earthquake
Finally, we compare the impacts on resilience metrics for the different scenarios. Figure 5.8 shows the
temporal center of resilience, ρQ (tr , Ωα ) for α = 1, 2, . . . , 1678 , for scenarios ALA−0 − 1 − 2, together with
129
the recovery curves in terms of the aggregated functionality over the whole Seaside, Q (τ, Ω) . We observe
that 1) The temporal resilience metric for each Ωα effectively captures the temporal aspects of the recovery
curves for each of the service area. 2) Although the recovery progress in terms of the work performed progress
continuously over time we see the changes in functionality only after a substantial portion of the recovery
activities are completed, see Scenario 1 and 2 where the functionality only starts to recover at days 18,
and 25 respectively. This can be due to the design of the infrastructure where the region near the mainline
sees substantial damage so the complete infrastructure cannot see recovery unless the strategic elements are
recovered, it is also a product of the zonal and local scale priorities of the infrastructure components 3) For
scenario 1 and Scenario 2 we see a uniform increase in the resilience metric but the spatial patters are very
similar, this is again due to the fact that the recovery progress follows the similar recovery priority however
in scenario 2 the amount of damage in all the components is more which results in a longer duration for the
recovery of each of the components.
ALA
Scenario 0
Scenario 1
Scenario 2
ρQ (tr , Ωα )
40 days
7 days
1 day
1 hr
Q (τ, Ω)
15 min
1
confidence band
0
0.5
τ [day]
10
0.5
τ [day]
1
15
17
19
τ [day]
21
23 25 27 29 31 33 35
τ [day]
Figure 5.8: Temporal center of resilience and aggregated recovery curves for Scenarios ALA, 0, 1, and 2
Figure 5.9 shows the estimates of the instantaneous spatial center of resilience, ρQ (tr , τ̂ ) according to
the different scenarios. In the top plots, the contours show the distribution, fρQ [tr ,τ ] using kernel density
estimation, a non-parametric approach to estimate the probability density function (Hastie et al. 2009).
The bottom plots show the estimates of d ρQ (τ̂ ) , ρ∗Q (τ̂ ) for all τ̂ ∈ [0, TR ] . The estimates of dρ are
also shown with dashed lines. The results show that 1) low damages results in high spatial disparity for a
small amount of time, however as the damages are extremely high we see a low spatial disparity but for a
very high duration due to the longer recovery processes. 2) We also see that the estimates of the center of
resilience favor the eastern and northern regions of Seaside, i.e. the south western portions of Seaside see
130
higher disparate impacts in terms of potable water functionality. Note that the recovery schedules in all the
scenarios are identical to maintain consistency for comparison. However, the integration of the proposed
formulation with the optimization approach in Sharma et al. (2020b) can improve the temporal progress as
captured by ρQ (tr , Ω) , and reduce the spatial disparity as captured by d ρQ (τ̂ ) , ρ∗Q (τ̂ )
fρQ [tr ,τ̂ ∈(0,TR )]
ALA
Scenario 0
Scenario 1
Scenario 2
high
low
Centroid
d ρQ (τ̂ ) , ρ∗Q (τ̂ )
'
'
'
'
2
0
0
confidence band
0.5
0.12
0.5
τ [day]
10
0.5
τ [day]
0.40
1
15
17
19
τ [day]
21
0.26
23 25 27 29 31 33 35
τ [day]
Figure 5.9: Spatial centers’ of resilience density and recovery disparity for Scenarios ALA, 0, 1, and 2
Table 5.7 shows the estimates of ρQ (tr , Ω) and χQ (tr , Ω) for all 17 + 1 scenarios. The results highlight
the influence of soil corrosivity on the resilience of the system. The theoretical scenarios with uniform, low
corrosivity soil (Scenarios 5 to 8) show results comparable with Scenario 0 (brand-new conditions for the
pipes). Conversely, the theoretical scenarios with uniform, high corrosivity soil (Scenarios 13 to 16) display
the longer repair times required for the infrastructure. We also observe that the estimates of ALA are similar
to those of Scenario 16.
131
Table 5.7: Temporal center of resilience and resilience bandwidth for all scenarios
Soil Corrosivity
Pipelines’ age
Actual
Uniform
Uniform
medium
high
Uniform low
ALA
0.8, 0.5
Pristine
0.1, 0.1
Actual in 2020
19.4, 0.8
05, 0.2
0.5, 0.2
35.0, 1.3
Actual in 2030
28.0, 1.7
0.9, 0.5
0.9, 0.5
64.6, 3.0
0.5, 0.2
0.4, 0.2
0.5, 0.2
0.6, 0.5
0.7, 0.5
0.5, 0.2
0.7, 0.5
0.8, 0.5
Equivalent uniform
in 2020
Equivalent uniform
in 2030
5.6
Conclusions
This chapter proposed a unified formulation for deterioration and recovery of engineering systems aimed
at the quantification of the resilience of the infrastructure over time. The framework included a statedependent, physics-based formulation for the evolution of the state variables due to both the deterioration
phenomena occurring before the occurrence of the shock event, and the recovery actions that are selected
following the shock event. Emphasis was posed on the application of the proposed framework to water
infrastructure, with a detailed formulation of physics-based repair rate curves for pipelines and recovery
action planning for water networks. The expected damage on pipelines was obtained as a function of a
set of physical parameters including soil properties, geometrical dimensions, and material properties. The
distinction of the damage on the pipeline segments and the pipeline joints allowed for a more accurate
estimate of the time needed for recovery. Recovery was modeled with a hierarchical approach that divides
infrastructure into several recovery zones and prioritizes them based on desired resilience objectives. The
proposed formulation was applied to the case study of the coastal community of Seaside, OR. The results
highlighted the importance of considering the age of the pipelines in estimating the resilience of the water
network, as well as the influence of the spatial variability of soil conditions on the performance of the network.
132
Chapter 6
Modeling and Evaluating the Impact
of Natural Hazards on Communities
and their Recovery
6.1
Introduction
Decision-making is often based on information about risks associated with possible courses of action
(Bedford and Cooke 2001). Risk analysis requires defining the consequences relevant to the decision process and quantifying their probabilities (risk assessment), as well as evaluating the quantified risks (risk
evaluation) (Rowe 1980; Gardoni et al. 2016). Infrastructure managers, administrative policymakers, and
governments often need to make risk mitigation decisions that impact the well-being of communities for
decades (Ingram et al. 2006). Such decisions should be based on regional risk and resilience analyses that
not only capture the immediate impact of hazards but also consider the long-term impacts and the ability
of structures, infrastructure, and communities to recover (i.e., their resilience) (Gardoni 2019).
A holistic approach to regional risk and resilience analysis requires 1) engineering tools to model the
physical damage and functionality of interdependent infrastructure subject to multiple hazards, 2) social
science approaches to define the relevant measures of societal impact, and 3) interdisciplinary models to
translate the reduction or loss of functionality of infrastructure into the selected measures of societal impact.
Figure 1 shows a schematic representation of such a holistic approach to regional risk and resilience analysis.
The scope of the problem is quite general. It involves the characterization of physical and socioeconomic
systems (first column in Figure 6.1), the modeling of aging and deterioration (second column in Figure 6.1),
the prediction of immediate impact due to the occurrence of a hazard (third column in Figure 6.1), and the
modeling of the recovery process (the last column in Figure 6.1).
133
S
Char ystem
acter
izati
on
Dete
ri
1
k
or
tw
e
N
or
tw
Ne
orati
on
Haza
Dete
comrpiorate
onen d
t
rd Im
pa
ct
Reco
very
k2
s
g
din
il
Bu
time
Da
ag
comm
poneed
nt
Dete
rio
buildrated
ing
n
tio
ula
p
Po
Injur
y
Functionality of Network1
Functionality of Network2
Damage state of building
Dislo
catio
n
Fata
li
ty
Vulnerabity of population
Supporting buildings and networks
Figure 6.1: Schematic description of a holistic approach to regional risk and resilience analysis
Past research has developed engineering tools required to model the performance of physical systems,
like structures (e.g., Ellingwood 2001; Gardoni et al. 2016; Dong and Frangopol 2017) and infrastructure
(e.g., Ellingwood 2005; González et al. 2016; Guidotti et al. 2016). There are additional nuances that
engineering tools can model, including the effects of aging and deterioration (e.g., Frangopol et al. 2004;
Sanchez-Silva et al. 2011; Jia and Gardoni 2018), climate change (e.g., Lin et al. 2012; Murphy et al. 2018),
and interdependencies among physical systems (e.g., Ouyang 2014; Ellingwood et al. 2016). The engineering
tools also model the reduction or loss of functionality of structures and infrastructure while capturing the
cascading effects due to interdependencies (e.g., Guidotti et al. 2019; Gardoni 2019).
There are also available approaches that define, measure, and predict societal impacts (e.g., Faber and
Maes 2008). The dollar value of physical damages, loss of life, and downtime of physical systems are the usual
measures of societal impact (May 2007). The need for a broader definition of impacts has been recognized
134
by research communities and led to new directions. Various utility-based approaches assess societal impacts
in terms of utility lost in a hazard, where utility is a measure of satisfaction. Examples of such utility-based
approaches include cost-benefit analysis (Boardman et al. 2017) and multi-criteria decision analysis (Köksalan
et al. 2011). Alternatively, the Capability Approach to risk analysis assesses societal impacts in terms of
individuals’ genuine opportunities, called capabilities. Examples of capabilities include the opportunities to
be in good health, nourished, and educated. Such capabilities collectively determine the state of individuals’
well-being. The Capability Approach was initially developed in the context of development economics (Sen
1990) and then extended to risk analysis (Murphy and Gardoni 2006). Once risk is quantified, the evaluation
of risk should capture the duration of impacts (which calls for the consideration of resilience), as well as the
spatio-temporal variability of the impacts (i.e., inequalities) (which calls for the consideration of sustainability
and social justice) (Boakye et al. 2019).
However, the existing engineering tools and measures of the societal impact have been developed in isolation without capturing the interactions among physical systems, socioeconomic institutions, and systems
necessary for societal well-being. In this chapter, we present a holistic formulation for regional risk and
resilience analysis, integrating state-of-the-art engineering tools with social science approaches. Specifically,
we use the Capability Approach to define and evaluate the societal impact of hazards. The discussion in
support of the Capability Approach to the regional risk and resilience analysis is beyond the scope of this
chapter. However, we discuss some advantages of defining and evaluating impacts in terms of capabilities in
the next section. After defining the capabilities, we develop mathematical models to quantify the impact on
capability measures. Such models are probabilistic and capture the relevant uncertainties required for risk
and resilience analysis (Der Kiureghian and Ditlevsen 2009; Murphy et al. 2011). Developing an integrated
mathematical formulation requires maintaining consistency among the constituent models. The proposed
holistic formulation builds on several models previously developed by the authors of this chapter that collectively support the required consistency. Figure 6.2 shows a schematic representation of the proposed holistic
formulation for regional risk and resilience analysis. To illustrate the proposed formulation, we consider the
modeling of the impact of a hypothetical earthquake and the subsequent recovery of communities in Shelby
County, in the state of Tennessee (T.N.), United States. Specifically, we model direct physical damages to
structures and infrastructure, the cascading effects of the loss of functionality, and the ultimate impact on
specific capability measures. We also model the post-disaster recovery of physical systems and their societal
implications.
135
Community before a hazard
Community after a hazard
Exposure
System Characterization
Climate
change
impact
Physical and socioeconomic systems
Community during recovery
Recovery
Impact
Deterioration of
physical systems
Loss/reduction
of functionality
Hazard
intensity map
Environmental
and hazard
exposure
Physical
damage
Impact on
capability
indicators
Recovery
of physical
damage
Recovery of
capability
indicators
Recovery of
functionality
Decision Making
Mitigation and
Risk
recovery policies
evaluation
Figure 6.2: Schematic representation of the proposed holistic formulation for regional risk and resilience
analysis
The rest of the chapter is organized into four sections. Section 6.2 presents the regional risk assessment.
Section 6.3 extends the discussion to the regional resilience assessment. Section 6.4 focuses on regional
risk and resilience evaluation. Section 6.5 presents a comprehensive example of regional risk and resilience
analysis. Finally, the last section summarizes the chapter and draws some conclusions.
6.2
Regional Risk Assessment
The quantification of the relevant impacts of extreme events such as earthquakes and hurricanes is a
crucial step in regional risk assessment. To justify the necessity of a risk mitigation program, it is critical to
understand and evaluate the impact a given hazard might have on the well-being of individuals. This section
discusses the key elements of regional risk analysis, ranging from the mathematical modeling of hazards
and physical systems to the effects of deterioration processes and climate change, and to the modeling
of the cascading effects of the loss of functionality of physical systems. We then discuss integrating the
functionality assessment of physical systems with the Capability Approach to quantify the societal impact
of a given hazard.
136
6.2.1
Characterization of hazards, physical systems, and socioeconomic
systems
Accurate regional risk analysis requires not only a good understanding of hazards, physical systems,
and socioeconomic systems but also a representative mathematical model of reality, known as the characterization. The characterization begins with a collection and integration of data about hazards as well as
different physical and socioeconomic systems from multiple sources. Such data are typically unstructured
and incomplete and need to be processed and synthetically enhanced to enable a virtual representation of
reality. Given the region of interest and the availability of data, the characterization further includes the
selection of models for individual systems, their scales, boundaries, and resolutions as well as interactions
among different models.
To accurately model the impact of a hazard on physical systems, the hazard model must capture the
spatial variabilities of hazard intensity measures. For the region of interest, we need to define the footprint
of the hazard and physical systems. For a given hazard scenario, the footprint of the hazard (defined as
the region where the intensity measure(s) are nonzero) could be smaller than the footprints of the physical
systems. However, the footprint of the hazard model needs to be at least as large as the largest footprint of the
physical systems. Also, in a probabilistic analysis, where the hazard scenario is not predefined, the definition
of the “footprint of the hazard model should” consider the hazard’s possible impact on all considered physical
systems. Considering a tornado, for example, the footprint of a realized track might be significantly smaller
than the footprint of any physical system. However, a probabilistic analysis should consider the likelihood of
the occurrence of all possible tracks that could impact the physical systems. Therefore, for both a scenario
analysis and a fully-coupled risk analysis, the footprint of the hazard model should be at least as large as the
largest footprint of the physical systems and generally contain the source of the hazard. Once the footprint
is defined, one can decide the resolution of the hazard model. The resolution of the hazard model affects the
ability to capture the spatial variability of the hazard intensity measures over the region of interest, which
is critical for modeling damage to the physical systems.
The definition of the footprint of physical systems depends on four key factors. The first factor is the
type of analysis and information of interest, such as physical damage or functionality analysis. For network
connectivity analyses, the footprint of the network might be contained in the region of interest. In contrast,
for network flow analyses, the footprint may exceed the geographical boundaries of the region to include the
external sources. The second factor is related to the existence of easily recognizable physical boundaries and
the possibility to model the boundary conditions. The third controlling factor is the existence and location
of strategic elements such as the source/sink nodes. Finally, the last factor is about the spatial extent of
137
damage propagation among the physical systems and the cascading effects of their loss of functionality. As
for the hazard model, we need to define the modeling resolution of the physical systems. Different modeling
resolutions affect our ability to capture the spatial variability of the impact arising from the changes in the
capacities of the physical systems and service demands.
The boundaries of socioeconomic models may extend beyond the geographic boundaries of the region of
interest, depending on the social structure of the impacted communities and the significance of the impacted
economic sectors. The resolution of the socioeconomic models is typically a lot coarser than that of physical
systems due to the availability of data from sociopolitical agencies and economic sectors, and privacy and
ethical constraints.
6.2.2
Modeling damage to physical systems
To predict the level of damage to physical systems, we use fragility functions for localized components
located at a specific site (e.g., Gardoni et al. 2002), and repair rate functions for spatially distributed linear
components (e.g., O’Rourke and Deyoe 2004). Gardoni et al. (2002, 2003) proposed a general formulation
for physics-based fragility functions by conducting reliability analyses. Failure events in reliability analysis
are represented by defining limit-state functions as
gk (x, Θk ) = Ck (r, ΘC,k ) − Dk (r, s, ΘD,k ) , k = 1, . . . , q
(6.1)
where gk (·) is the limit-state function of the kth failure mode; Ck (·) is the capacity model associated with
the kth failure mode; Dk (·) is the respective demand model; and x = (r, s) is the vector of state variables, in
which r captures the characteristics of the physical system, and s is the vector of hazard intensity measures;
and Θk = (ΘC,k , ΘD,k ) is the vector of model parameters. Accordingly, we can write the fragility function
as
"
F (s, Θ) = P
q
[
#
{r : gk (x, Θk ) ≤ 0} |s, Θ
(6.2)
k=1
where Θ = (Θ1 , . . . , Θq ) . The methods of reliability analysis can be used to estimate the fragility
function. Further details about the formulation of the probabilistic capacity and demand models, as well as
the treatment of uncertainty in Θ can be found inGardoni et al. (2002). The repair rate functions can be
obtained from the estimates of fragility functions for linear elements, as discussed in Iannacone and Gardoni
(2018).
138
6.2.3
Modeling the impact of aging and deterioration of physical systems
Multiple mechanisms can contribute to the deterioration of physical systems over time. The deterioration
mechanisms can result in reduced reliability, functionality, and overall service life of a system (e.g., Kumar
et al. 2015). In most cases, the deterioration mechanisms can interact with each other, resulting in a
faster deterioration than when simply superimposing the effects of the individual ones. Jia and Gardoni
(2018) developed a state-dependent formulation to model the impact of multiple and possibly interacting
deterioration mechanisms on the state and reliability of physical systems. The mathematical representation
involves modeling the variation of the state variables x over time (i.e., x = xt ) due to the deterioration
mechanisms and integrating the estimates of xt into the formulation of the fragility functions in Eq. 6.2.
6.2.4
Modeling the impact of climate change
Climate change is impacting regional risk analysis in four fundamental ways (Gardoni et al. 2016; Murphy
et al. 2018). First, climate change is impacting the likelihood of the occurrence of extreme natural events
like heat waves and droughts, severe precipitations, and hurricanes. Second, climate change is impacting
the deterioration processes. Sudden (shock) deterioration due to the occurrence of severe natural events
might become more frequent and more significant in magnitude due to the increased likelihood of extreme
events. The rate of gradual deterioration might change due to changes in the environmental conditions that
govern such mechanisms. Third, climate change is likely to exacerbate social differences and inequalities
since individuals that are worst off often live in areas that are most likely to experience natural hazards
impacted by climate change (e.g., flood). Finally, climate change is bringing additional uncertainties in the
prediction of the physical damage and societal impact.
6.2.5
Modeling dependencies/interdependencies
Physical and socioeconomic systems in the real world are typically interdependent. However, most
available research focuses on modeling individual systems in isolation. The origin of interdependent analysis
is in the field of economics. Wassily Leontief won the Nobel Prize in 1973 for the first mathematical model
of interdependent economic sectors, called the input-output model (Leontief 1986). The input-output model
identified that economic sectors have interdependencies on both demand and supply sides. The model then
considered such interdependencies in terms of the monetary value at the economic sector level. The state of
physical systems, however, are typically modeled at a much finer resolution using the Graph theory. Physical
systems are modeled as networks with nodes and links representing various localized and linear components.
The failure of each network is then captured using the measures of network connectivity (Crucitti et al.
139
2003; Guidotti et al. 2017a). For physical systems, the input-output model has since been extended to model
the failure probability of components of a physical system given the failure of a component in a supporting
system. Guidotti et al. (2017a) provide a matrix-based approach to compute component failure probabilities
in interdependent systems efficiently. However, interdependencies in physical systems can be highly nuanced,
and other quantities, in addition to the failure probability, can be of interest; particularly, when dealing with
reduction or loss of functionality (Discussed in Section 6.2.6). This chapter uses the approach proposed by
Sharma and Gardoni (2020) that addresses the listed issues and enables capturing continuous state changes
in addition to the failure probability. This formulation allows for capturing interdependencies by modeling
conditional distributions of capacities and demands. For example, the reduction in the performance of the
power infrastructure leads to the loss of capacity for the water pumping stations. Conversely, the damage
to a pumping station leads to a loss of demand for power.
6.2.6
Modeling the reduction or loss of functionality of physical systems
After assessing the damage to the physical systems, we need to assess the loss or reduction of their
functionalities. Such changes in functionalities might be due to the direct physical damage to the systems as
well as the loss or reduction of functionality of supporting systems (Ellingwood et al. 2016; Guidotti et al.
2016). Several methods have been developed for the performance analysis of infrastructure, including flowbased models, topological models, statistical models, and hybrid models (e.g., Vaiman et al. 2012). Disaster
impact research tends to favor simpler models, such as the topological connectivity and maximum flow (e.g.,
Ouyang 2014). However, to capture cascading failures and assess infrastructure functionality accurately,
high-fidelity flow analyses should be used. In this chapter, we use the probabilistic formulation developed
by Sharma and Gardoni (2020). This formulation decouples the functionality analysis of interdependent
infrastructure. Therefore, it reduces the computational cost of high-fidelity flow analyses and enables accurate
functionality assessment.
6.2.7
Modeling the societal impact using a Capability Approach
For a structure or structural system, the likelihood that a given hazard causes significant damage or
collapse is based on the vulnerability of the structure or structural system. Vulnerability captures the
propensity of the structure or structural system to be impacted. In the same way, for an individual or
household, the likelihood that a hazard turns into a disaster is based on the vulnerability of the individual
or household (World Commission on Environment and Development 1987; Ribot 1995; Adger 2006). In a
social context, vulnerability captures the propensity of the individual or household to be impacted. Like
140
structural characteristics that define the structural vulnerability, socioeconomic characteristics define social
vulnerability (Peacock and Girard 1997; Kajitani et al. 2005). As a result, after assessing the reduction or
loss of functionality of physical systems, we need to consider the social vulnerability to estimate the impact
of a hazard on the well-being of individuals. The characteristics that define social vulnerability are also
relevant in predicting the recovery time and in developing mitigation/recovery strategies that promote social
justice (as discussed in more detail later in the chapter).
To systematically define, quantify, and evaluate the societal impact of hazards, Murphy and Gardoni
(2006) proposed a Capability Approach for risk analysis. In this approach, capabilities are the opportunities
that open to individuals to do or become things of value, called functionings (Sen 1999); examples of
functionings include meeting the physiological needs, being mobile, having shelter, and being educated. The
changes in individuals’ capabilities can be used as the measure of societal impact and recovery. By looking at
the spatial and temporal variability of capabilities, we can also capture the spatial and temporal variability
of the impact. The capabilities are functions of what individuals have (e.g., personal resources, skills, and
knowledge) and what they can do with what they have, given legal, economic, and social constraints, and the
state of physical systems. For example, to be mobile, individuals need personal resources like money to use
public transportation, purchase or rent a vehicle, or buy or rent a wheelchair. Physical and mental abilities
and knowledge needed to use any of these modes of transportation are also required. The availability and
functionality of transportation infrastructure shape mobility, as do legal institutions. Legal requirements
prevent individuals not of legal age to drive a car. Similarly, the recovery of the physical systems, at least
in part, defines the recovery of individuals by re-establishing their lost opportunities.
There are several advantages to using the Capability Approach for regional risk and resilience analysis.
First, the Capability Approach focuses on what is most crucial, namely, individuals’ well-being. To assess
the societal impact, it does not look exclusively at immediately evident effects, such as physical damage.
Rather, the Capability Approach captures the effects of a hazard on the functionings that are the constitutive
elements of individual well-being. Such functionings refer to what individuals can do or become (e.g., being
healthy, being educated, being mobile). Second, functionings are the orthogonal dimensions of well-being,
which are not comparable or replaceable. In contrast, utility-based approaches aggregate different monetary
and non-monetary impacts. Since functionings do not compensate for deprivation in one dimension of wellbeing (e.g., education) by improvement in others (e.g., mobility), strategies and measures of improving
well-being have specific targets under the Capability Approach. The focus of the Capability Approach on
the orthogonal dimensions of well-being also eliminates the common concerns in defining the monetary value
of human life and damage to the environment, as well as the accuracy of surveys and market information to
capture the incurred losses (Slovic 1987). Instead, the Capability Approach uses non-monetary indicators to
141
measure the level of achievement for each functioning. For example, a hazard can impact mobility functioning
as measured by an indicator such as the frequency of travel per week. Third, the Capability Approach has
already been adopted in diverse areas ranging from development economics in the United Nations Human
Development Index (UNDP 2015) to multidimensional poverty measurement (Alkire and Foster 2011), social
justice (Wolff and De-Shalit 2007), and risk analysis (Murphy and Gardoni 2006). Thus, a Capability
Approach to risk assessment enables policymakers to quantify the benefits of development initiatives and the
impact of hazards using the consistent metrics of societal well-being. A consistent theoretical approach in
this regard is essential since the United Nations recognize both the risk management of natural hazards and
broader community development measures as critical to the success of sustainable development initiatives,
especially for uncertain climate change.
There are also challenges in operationalizing the Capability Approach, including the selection of relevant
capabilities and their indicators. Such indicators are required to quantify individuals’ capabilities. These
challenges have been thoroughly discussed in the literature (see, for example, Nussbaum 2007).
To quantify the societal impact, Tabandeh et al. (2018a) proposed a general mathematical approach,
called a Reliability-based Capability Approach (RCA). The formulation of RCA consists of a set of probabilistic predictive models for different functionings, as each quantified by an indicator. The (predicted) values
of indicators for all functionings collectively determine the state of well-being. To estimate the probability
that the state of well-being is above or below the desired level, one can use the probabilistic predictive models
of the indicators in a system reliability formulation.
The probabilistic models of indicators predict the values/categories of each indicator as functions of a set
of regressors. The regressors capture the functionality of physical systems and social vulnerability factors.
For example, consider the frequency of travel during a week as an indicator of individuals’ mobility. The value
of the indicator is a function of social vulnerability factors such as age, wealth, and gender of individuals,
as well as the functionality of transportation infrastructure. The occurrence of a disruptive event can affect
the values/categories of indicators by changing the corresponding regressors (e.g., loss of functionality of
transportation infrastructure in the mobility example.)
We can mathematically model the well-being of individuals as a system of interconnected indicators.
Such models should be probabilistic, capturing uncertainties in the quantification of indicators. Following
Tabandeh et al. (2018b), we can write the probability that the state of well-being St at time t is in the
domain of interest Ω (e.g., an intolerable state) as
P [St (Θ) ∈ Ω] =
!
P
[ \
{Il (zt , Θ) ∈ Ωl } |zt
m l∈Cm
142
dF (zt )
(6.3)
where Il (zt , Θ) is the predicted value/category of the lth indicator; Cm ⊆ {1, . . . , L} is a cut-set, defined
such that the joint occurrence of the events {Il (zt , Θ) ∈ Ωl : l ∈ Cm } results in the occurrence of the event
S
{St (Θ) ∈ Ω} (Ditlevsen and Madsen 1996); the union operator
captures the occurrence of any such cutsets; zt is the vector of all regressors; F (zt ) is the joint Cumulative Distribution Function (CDF) of zt ; and
Θ = (Θ1 , . . . , ΘL ) is the vector of all model parameters.
We integrate the probabilistic models of the indicators into a Bayesian Network (BN) to graphically represent the relations among indicators and conveniently model the state of well-being (Tabandeh et al. 2018b).
Figure 6.3 shows a generic BN to model the state of well-being at time instant t . The graphical structure
of the BN includes four sets of nodes: 1) Regressors zt = (zt,1 , . . . , zt,N ) , 2) Indicators (It,1 , . . . , It,L ) , 3)
States of indicators (St,1 , . . . , St,L ) , and 4) State of well-being St . We may partition the set of regressor
nodes into two subsets: 1) Regressor nodes that capture the functionality of physical systems, and 2) Regressor nodes that capture the social vulnerability factors. For the first subset, we obtain their probability
distributions from the probabilistic analysis of the physical systems, discussed earlier. For the second subset, we obtain their probability distributions from the available databases (e.g., survey data). The arrows
from (zt,1 , . . . , zt,N ) to (It,1 , . . . , It,L ) capture the statistical dependence of the indicators on their regressors,
according to the probabilistic models of the indicators. The probability distributions of the indicators are
obtained from the respective probabilistic models. Associated with each It,l there is a St,l that determines
the state of the indicator at time t as a function of the value/category of the indicator. Finally, to obtain
the probability distribution of St , we need to define the relations between the states of indicators and that
of well-being (i.e., define the cut-sets). We will discuss such relations in Section 6.4.
Regressors
xt,1
xt,2
···
xt,N
Indicators
It,1
···
It,L
state of indicators
St,1
···
St,L
St
state of well-being
Figure 6.3: A generic BN for the well-being analysis (adapted from Tabandeh et al. 2018b)
6.3
Regional Resilience Assessment
Many definitions of resilience are available in the literature (e.g., National Research Council 2012). In
this chapter, we define resilience as “the ability of a system to withstand external perturbation(s), adapt,
143
and rapidly recover to the original or a new level of functionality” (Gardoni and Murphy 2018). The readers
are referred to Gardoni (2019) for a reference text on current research on resilience analysis across a wide
range of disciplines. This section discusses the recovery and resilience analysis of physical and socioeconomic
systems.
6.3.1
Modeling the recovery and resilience of physical systems
The modeling of the recovery process is required for the resilience quantification of physical systems. The
existing parametric recovery curves (e.g., Cimellaro et al. 2010; Decò et al. 2013) do not replicate the actual
situation of the recovery process. There is a lack of explicit relation between the shape of the recovery curve
and its influencing factors like available resources. Furthermore, because the recovery modeling is at the
system level, it is not generally possible to use the information (e.g., time and expenditure) gained from the
recovery of one system to model the recovery of other even similar systems. Sharma et al. (2018a) addressed
these issues by developing a physics-based stochastic formulation for the recovery process that accounts for
the actual work progress. The resilience of physical systems also changes over time because of deterioration
as well as maintenance and mitigation strategies. Jia et al. (2017) integrated the recovery formulation with
deterioration models, discussed earlier, to incorporate such changes in the resilience quantification.
For regional resilience, the recovery curve should represent the collective functionality of all infrastructure
(Guidotti et al. 2016). There are additional constraints in the recovery modeling of spatially-distributed
infrastructure, such as access/connectivity, crew availability, and crew work continuity. Existing literature
on the recovery modeling of infrastructure (e.g., González et al. 2016) generally neither considers such
constraints nor correctly models the recovery of functionality, leading to unrealistic recovery schedules. In
this chapter, we use the multi-scale approach developed by Sharma et al. (2019, 2020b) that addresses the
above issues in modeling large-scale, spatially-distributed, interdependent physical systems.
6.3.2
Modeling the recovery and resilience of society
The functionality of physical systems plays a critical role in the well-being of individuals. As a result, the
recovery of the physical systems plays a crucial role on the recovery of communities impacted by a hazard.
The Capability Approach, presented earlier, can also be used to model the societal recovery as described
in Gardoni and Murphy (2018). One can use the functionality estimates of the physical systems as inputs
to the Capability Approach to model the variations of individuals’ well-being over time. Tabandeh et al.
(2018b) proposed a Dynamic Bayesian Network (DBN) to implement the prediction process. The DBN
extends BN, discussed earlier, to translate the post-disaster recovery of the physical systems into societal
144
recovery in terms of St (·) (see Eq. 6.3). The predicted functionality of the physical systems is reflected in the
time-dependent values of zt . The subset of regressors that capture social vulnerability factors may remain
unchanged during the short-term recovery. Though, the formulation of the DBN allows us to incorporate
any possible changes in the values of zt through Bayesian updating (Bensi et al. 2014).
6.4
Risk and Resilience Evaluation
By evaluating the quantified risk, we can determine the relative severity of the risk and inform decisions
for risk mitigation and disaster management. In this section, we first discuss sustainability and social justice
to provide context for risk and resilience evaluation. We then discuss the elements of risk evaluation from
the Capability Approach’s perspective.
6.4.1
Sustainability and social justice
There are three normative considerations related to sustainability that should influence the design of physical systems and the evaluation of risks (Faber and Maes 2008; Gardoni and Murphy 2018). These normative
considerations are a) environmental justice, b) global (or distributive) justice, and c) inter-generational justice.
Environmental justice is about the state of the natural ecosystem. Having a flourishing of natural
ecosystem might be good in itself as well as instrumentally since an ecosystem might support the wellbeing of individuals. Environmental justice calls for the design of physical systems and recovery strategies
that protect and ideally promote the flourishing natural ecosystems (Anderson and Woodrow 1989). A
Capability Approach allows us to incorporate environmental justice considerations by selecting a capability
that explicitly captures the impact on individuals of the flourishing of ecosystems and by defining a functional
relation between the flourishing of ecosystems and the opportunities individuals have (Martins 2011; Ballet
et al. 2011, 2013).
Global justice is about the fairness of the distribution of the impact and recovery opportunities. Past
disasters have shown that certain population groups are often more impacted than other ones and recover
more slowly. Global justice calls for the design of physical systems and the distribution of mitigation and
recovery resources that promote fairness in the impact and recovery of communities (World Commission
on Environment and Development 1987; Alexander 2002). A Capability Approach allows us to look at the
fairness in the genuine opportunities that different individuals have over time.
Finally, inter-generational justice is about giving fair consideration to future generations (Gardoni and
Murphy 2008; Faber and Maes 2008). Inter-generational justice calls for the design of physical systems, and
145
the development of mitigation and recovery strategies that respect and ideally promote inter-generational
equity (World Commission on Environment and Development 1987). Probabilistic models of capability
indicators, discussed earlier, enable the development of current policies while accounting for fairness across
generations.
6.4.2
Capability Approach to risk evaluation
Murphy and Gardoni (2008) proposed to evaluate risk by comparing capability measures with prescribed
acceptable and tolerable thresholds. The acceptable threshold sets the minimum level of a capability that
should be permissible over any period to any individual. The definition of the acceptable threshold captures
the demand of justice, “necessary condition of justice for a public political arrangement is that it delivers
to citizens a certain basic level of capability” (Nussbaum 2000). On rare occasions (like in the case of the
occurrence of an extreme natural event), Murphy and Gardoni (2008) argued that a lower level of capabilities
should be permitted. However, being below the acceptable threshold should be temporary, and still above
a tolerability threshold. The tolerability threshold is defined as the “absolute minimum level of capabilities
any individual should have at any time” (Murphy and Gardoni 2008).
Risk is classified as acceptable, not acceptable, and not tolerable based on quantified capabilities immediately after the occurrence of a hazard. When a risk is not acceptable, we need to consider how quickly
the capabilities improve to assess whether the risk is tolerable or not. This evaluation requires modeling
the recovery of the physical and socioeconomic systems, as described in earlier sections. As a result, the
resilience of the physical and socioeconomic systems informs the evaluation of risk. If the physical systems
and society are more resilient, the recovery time tends to be shorter, and risks tend to be more tolerable.
As for the evaluation of risk at the individual level, we can account for global and inter-generational justice
in the risk evaluation by defining a permissible threshold of inequality (Gardoni and Murphy 2018). If the
inequalities are likely to be exacerbated beyond the inequality threshold, the risk might not be acceptable
because of its social injustice. At the same time, the risk might be tolerable if the exacerbation is temporary
and reversible in a sufficiently short time. The definitions of acceptable, tolerable, and inequality thresholds
can be based on normative obligations informed by human rights as well as incorporate information solicited
by democratic deliberations.
146
6.5
Regional Risk and Resilience Analysis: A Benchmark
Example
To illustrate some of the concepts discussed, we consider the post-disaster recovery modeling of physical systems and communities in Shelby County, TN. Shelby County, with a population of approximately
1, 000, 000 people, is subject to seismic events originating from the New Madrid Seismic Zone. In this example, we consider a scenario earthquake with the moment magnitude of 7.7 and the epicenter at 35.93◦ N and
89.92◦ W (i.e., North-West of Shelby County).
6.5.1
Characterizing hazard and physical systems
Since Shelby County is the region of interest, we define the footprints of the seismic hazard model and
physical systems based on the footprint of Shelby County. The footprint of the seismic hazard model includes
the entire state of Tennessee and the New Madrid Seismic Zone, which allows us to model the damage to the
considered physical systems. In this example, we use a hybrid model to predict the intensity of the seismic
hazard. For areas closer to the seismic source, including the entire Shelby County, we use a three-dimensional
(3D) physics-based model that considers the effects of the source kinematics, basin configuration, and local
site topographic and geologic conditions (Mazzieri et al. 2013). For areas farther away from the seismic
source (i.e., the rest of Tennessee), we use the available Ground Motion Prediction Equations (GMPEs) for
the Central and Eastern United States (Steelman et al. 2007).
Buildings, electric power infrastructure, and potable water infrastructure are the physical systems considered in this example. We collected the required physical and demographic data for every building in
Shelby County. The existing fragility functions of buildings require information about the structure type,
occupancy type, and the number of stories. The details of the datasets and fragility functions are in the
documentation of the risk assessment software MAEViz, developed by the Mid-America Earthquake (MAE)
Center (e.g., Steelman and Hajjar 2008). The majority of the buildings in Shelby County are residential;
however, the commercial and industrial buildings are critical to business operations and economic vitality of
the county and place comparable demands on the infrastructure to those of the entire residential buildings.
Memphis Light, Gas and Water (MLGW) division serves Shelby County with electric power. The power
supplier to MLGW is the Tennessee Valley Authority (TVA) that constitutes balancing authority in the state
of Tennessee. We model the electric power infrastructure at the state level to capture the damage to the
infrastructure operated by TVA and perform accurate power flow analyses. We develop a hybrid-resolution
model. For the portion in Shelby County, we develop a detailed model that allows us to 1) capture the
147
variability of the impact within the county, and 2) accurately estimate the timeline of a power outage for
dependent physical systems that need the power to operate, such as water infrastructure and buildings. For
the rest of the infrastructure that is outside Shelby County, we develop a skeletonized model that is sufficient
to 1) capture the damage to the external grid supplying power to Shelby County (i.e., generators, major
transmission lines), and 2) perform accurate power flow analyses.
Figure 6.4 shows the topology and service areas of the electric power infrastructure in Shelby County,
based on the data from Chang et al. (1996), and the topology of the infrastructure in Tennessee. The TVAoperated infrastructure is synthetically generated but is representative of the real infrastructure according
to the data provided by Birchfield et al. (2017). To estimate the hourly power demand of different service
areas, we use the MLGW annual fact sheet (MLGW (2015)) and the per-capita power demand provided
by Birchfield et al. (2017). We then connect the two portions, while maintaining the consistency at the
transition interface. We also add some previously missing components, such as the generators from the
Allen and Southaven power plant, located near Memphis.
(
!
(
!
(
!
(
(!
!
(
!
(
!
(
!
!
(
(
!
(
!
(
!
(
(!
!
(!
!
(
(!
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
(
(
!
(
(
(!
!
(!
!
(
!
(
(
(!
(
(
!
(!
!
(
!
(
(!
(!
!
(!
!
(!
!
(
!
(!
!
(
!
( !
!
(
(
!
(
!
(
!
(!
!
(
!!
(
(
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
( !
!
!
(
(
!
((!
(!
!
(
(!
!
((
!
( !
!
( !
!
(
(
!
(
!
!
(
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
Substation
Line
Service Area
Shelby County
Tennessee
(
!
!
(
(
!
(
!
(
!
(
!
(
!!
(
(( !
!
(
(!
!
! !
(
(
(
( !
(!
!
((
!
!(
! !
( !
( (
!
(
!
(
!
!
(
(
!
(
!
(
!
!
(
(
!
(!
!
(
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
!
(
(
(!
(!
!
!
(
(
!
(
!
!
(
(
!
(
!
( !
!
! !
(
(
(
( !
!
(
(!
!
(
(
!
!
(
!
(
(
!
!
(
!
(
(
!
!
(
( (
!
(
!
!
(
(!
!
(
!
(
!
( !
!
(
!
(
!
!
(
(
!
(
(
!
(
!
(
!
(
!
(
!
(
!
(
!
Figure 6.4: The electric power infrastructure in Shelby County and Tennessee
MLGW division also serves Shelby County with potable water. The footprint of the potable water
infrastructure is confined to Shelby County since water is locally drawn from the Memphis Aquifer in Shelby
County. The resolution of the potable water infrastructure is selected such that the model includes all main
distribution pipes (i.e., those a diameter of 8 inches and above.) Such a resolution provides a good trade-off
between the accuracy of functionality assessment and data requirements (Guidotti et al. 2019).
Figure 6.5 shows the topology of the potable water infrastructure. The solid (blue) lines in the figure
show the portion that we developed in a Geographic Information System (GIS) based on existing maps, as
148
provided by Chang et al. (1996). The dotted (red) lines in the figure show the additions that we designed
for the new developments, considering street maps and buildings access (Sharma et al. 2019). To identify
the low- and high-pressure zones, we also overlaid the elevation raster map in the figure. The potable water
infrastructure in Shelby County consists of 10 pumping stations, 9 booster pumps to connect the low- and
high-pressure zones, and 6 elevated tanks in high-pressure zones. To estimate the hourly power demand of
different service areas, we use the MLGW annual fact sheet (MLGW 2015) and the per-capita power demand
provided by Birchfield et al. (2017). To estimate the hourly water demand, we use the consumption data
on residential, commercial, and industrial sectors, and the annual fact sheet published by MLGW (MLGW
2015). Furthermore, we design the individual pipe diameters, locations of valves, and pump curves to satisfy
the required working pressure and velocity constraints. We used the Python package WNTR (Klise et al.
2017) to perform the hydraulic flow analyses.
Existing Pipeline
Added Pipeline
Pumping Station
Storage Tank
Reservoir
Elevation [m]
High : 141
Low : 58
Figure 6.5: The potable water infrastructure in Shelby County
6.5.2
Modeling damage to physical systems
To estimate the impact of the earthquake on the buildings, we use the estimates of the earthquake intensity
measures together with the fragility functions of the buildings (Steelman and Hajjar 2008). Figure 6.6 shows
the most likely damage state of the buildings in Shelby County for each of the residential, commercial, and
industrial occupancy types. The figure shows three damage states for each building, represented by 1) green
for low damage, 2) yellow for medium damage, and 3) red for high damage. We observe that, on average,
there is less physical damage to residential buildings than to industrial buildings. This pattern is mainly
related to the local amplification of seismic waves in certain areas in Shelby County, where the industrial
buildings are located.
149
Residential buildings
Commercial buildings
Industrial buildings
Figure 6.6: The most likely damage state of buildings in the immediate aftermath of the earthquake
We then estimate the impact of the earthquake on the components of the electric power infrastructure.
We model the direct physical damage to substations, integrating the component fragility functions (FEMA
2014) into a system reliability formulation. We also estimate the damage to secondary distribution circuits,
using service area damage ratios (FEMA 2014). Table 6.1 shows the summary statistics of the direct physical
150
damage to the electric power infrastructure inside Shelby County.
Table 6.1: The summary of direct physical damage to the electric power infrastructure
Item
%age
Damaged buses
28.3
Disconnected lines
45.4
Damaged transformers
59.5
Damaged service area
76
We also estimate the impact of the earthquake on the components of the potable water infrastructure.
The vulnerable components to seismic excitations are the pumping stations, booster pumps, tanks, and
pipelines. We use the estimates of the earthquake intensity measures together with the fragility (FEMA
2014) and repair rate (Hwang et al. 1998; FEMA 2014) functions to estimate the physical damage to the
vulnerable components. Table 6.2 shows the summary statistics of the physical damage to the components
of the potable water infrastructure.
Table 6.2: The summary of direct physical damage to the potable water infrastructure
Item
6.5.3
%age
Damaged booster pumps
90
Damaged pumping stations
80
Damaged tanks
0
Damaged pipes
22
Modeling dependencies/interdependencies
We model the interdependencies among the electric power infrastructure, potable water infrastructure,
and buildings. The mathematical models of the infrastructure consist of a structural network and a flow
network (Sharma and Gardoni 2020; Sharma et al. 2020a). The structural network models the physical
state of the infrastructure, and the flow network models the respective functionality state. The capacity of
the power flow network is dependent on the respective physical state, captured by the structural network.
The capacity of the hydraulic flow network is dependent on the respective structural network as well as
on the power flow network to supply the required power for the pumps to function. The demands on the
power and hydraulic flow networks depend on the damage states of commercial and industrial buildings as
well as households’ dislocation due to the building damage. The power demand is also dependent on the
151
functionality of the pumps in the hydraulic flow network. Finally, the functionality of buildings is dependent
on both the physical state of the buildings and the availability of basic amenities such as power and water.
6.5.4
Modeling the reduction or loss of functionality of physical systems
We estimate the initial impact in terms of the functionality of the physical systems. The components of the
electric power infrastructure can lose their functionalities due to 1) direct physical damage, 2) disconnection,
or 3) overloading. To perform the functionality analysis, we first detect disconnections in the structural
network, then “clean” the structural network by removing disconnected components, and finally perform
an optimized power flow analysis, while maintaining the dependency on the respective structural network.
Figure 6.7 shows the estimated functionality of the electric power infrastructure. The red lines and black
dots in the figure indicate non-functional components, whereas the green lines and green dots are functional
components. We observe that there would most likely be a complete blackout in Shelby County following
the scenario earthquake.
!
(
!
(
!
(
!
(
!
!
((
!
(
( !
!
!
(!
(
(
!
(
!!
!!
!!
(
(
(
(
(!
(!
(!
(!
!
((
((
!!
!
(!
(
(!
!
(
(
!
!
(
((
(
!
!
!
(
(( !
(!
(!
(
(!
!!
(
!
(
!
(!
!
!!
!
(!
!
(!
(!
((
((!
((
(!
! !
(
(
(
!
(
!
!
(
(
!
!!
(
(
(
!
(
!
!
(
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
( !
!
!
(
(
!
((!
(!
!
(
(!
!
((
!
( !
!
( !
!
(
(
!
(
!
(
!
(
!
(
!
(
!
!
(
(
!
!
(
Substation
( Functional
!
Non-Functional
Line
Functional
Non-Functional
(
!
(
!
(
!
! !
(
(
(
( !
((
!
(!
!
!(
! !
( !
( (
!
(
!
(
!
(
!
(
!
(
!
!
(
(
!!
(
(( !
!
(
(!
!
(
!
(
!
(
!
!
(
(
!
!
(
(
!
!
(
(
!
(!
!
(
(
!
(
!
(
!
!
(
!
(
!
(
!
!
((
(!
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
(
!!
(
!
(
!
(
!
(
!
(
!
( !
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(!
(
Figure 6.7: The impact on the functionality of the electric power infrastructure in the immediate aftermath
of the earthquake
We then estimate the functionality of the potable water infrastructure. To do so, we perform a hydraulic
flow analysis using a pressure-dependent demand approach, while maintaining the dependencies on the
respective structural network as well as the power flow network. Figure 6.8 shows the estimated functionality
of the potable water infrastructure without (Figure 6.8a) and with (Figure 6.8b) dependency on the power
flow network. The color of each demand node in the figure indicates the most likely functionality state
as a function of water pressure at the node. Comparing Figures 6.8(a) and 6.8(b), we can observe that
152
accounting for the dependency on the power network can significantly reduce the functionality of the potable
water infrastructure. The blackout in Shelby County in the immediate aftermath of the earthquake causes
all pumping stations and booster pumps to go offline, resulting in the complete loss of functionality of the
potable water infrastructure.
(a)
(b)
Figure 6.8: The impact on the functionality of the potable water infrastructure in the immediate aftermath
of the earthquake, (a) without dependency, and (b) with dependency on the electric power infrastructure
6.5.5
Modeling the societal impact using the Capability Approach
The capability of being sheltered is an essential dimension of individuals’ well-being (Boakye et al. 2019).
The direct physical damage to buildings can adversely impact the capability of individuals to be sheltered.
In this example, we focus on this capability as a measure of societal impact. We use access to a permanent
residence or being dislocated to a temporary residence as an indicator to quantify individuals’ capability of
being sheltered. To estimate the value of the indicator in the immediate aftermath of the earthquake, we
use the predictive model of households’ dislocation developed by Lin (2009). Figure 6.9 shows the estimated
probability of households’ dislocation due to the direct physical damage to the building. The color of the
filled circles shows the estimated probability of dislocation, whereas the size of the circles indicates the
households’ population. Note that the larger populations belong to nursing homes and prisons.
153
Figure 6.9: The estimated probability of household dislocation in the immediate aftermath of the earthquake
due to the direct physical damage to the building
We further model the effect of households’ dislocation on the service demands on the infrastructure. The
external dislocation of households (i.e., leaving the communities) results in service demand reduction and,
thus, may improve the service quality to areas where less or no dislocation has occurred. The immediate
functionality of the electric power infrastructure is unaffected by households’ dislocation because of the
blackout. In contrast, there is an improvement in the functionality of the potable water infrastructure
when we consider the dislocation of households as well as the lack of demand from damaged industrial
and commercial buildings. Figure 6.10 shows the functionality of the potable water infrastructure while
accounting for the reduction in demand. The comparison with Figure 6.8(a) shows how the physical damage
to commercial and industrial buildings and households’ dislocation due to building damage can affect the
functionality of the infrastructure.
154
Figure 6.10: The predicted functionality of the potable water infrastructure in the immediate aftermath of
the earthquake, accounting for the direct physical damage and households’ dislocation on water demand
6.5.6
Modeling the recovery of physical systems
To model the physical recovery of the buildings in Shelby County, we use a portfolio recovery modeling
approach. The portfolio recovery approach is useful to predict the general state of recovery over the entire
region of interest. Alternatively, high-fidelity recovery modeling approaches are required when accurate predictions are of interest for specific buildings (see, for example, Sharma et al. 2018a). For recovery modeling,
we categorize the buildings into residential and commercial or industrial buildings. For residential buildings,
we use the recovery model in Lin and Wang (2017), and for commercial and industrial buildings, we use
the recovery model in HAZUS-MH (FEMA 2014). These models do not consider recovery crew availability.
Instead, the controlling factors for building recovery are the socioeconomic conditions of households and
their decisions to migrate or rebuild (see, for example, Peacock et al. 2018). Figure 6.11shows the predicted
recovery duration of the buildings in Shelby County. In general, recovery modeling requires considering the
availability of workforce, material, site access, construction permits, secured funding, as well as the functionality of all supporting infrastructure. Therefore, the predicted recovery duration is only a lower bound
of the actual recovery duration.
155
Recovery Duration [days]
0 - 30
31 - 60
60 - 180
!
!
!
!
!
!
!
!
! !!
!! !
!
!
!!
!
!!
!
!
!
!
!!
!
!
!!!!!
!
!!
!
!
!
!
!
!
!!
! !!
!
!!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
!
!!!
!
!
!!
!!!!! !!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!!
!!
!
!!
!!
!!
!!
!!!!
!
!
!
!!!!
!!!!
!!
!
!
!!
!!
!!
!
!
!
!!
!!
!!
!!
!!
!
!!
!
!
!
!
!
!!!
!!
!!
!!
!!
!!
!!
!
!
! !!
!
!
!
!
!
!
!!
!!
!
!
!!!
!!
!
!
!!
!!
!!
!!
!!
!!
!!
!!
!
!
!
!
!!
!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
!!
!!
!
!!!
!
!
!
!!
!!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!! !
!
!
!
!!
!
!
!!
!!
!!
!
!
!
!!
!
!
!
!!
!
!
!
!
!
!
!! !!
! !!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
!!
!!
!!
!!
!!
!!!! !!
!
!!
!
!
!
!!
!!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!!!!
!!!!!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!!
!!
!
!!
!!
!!
!!
!!
!
!
!
!!
!!!
!!
!!
!!!
!
!!
!!
!!
!
! !!
!
!!
!!!
!!
!!
!!
!
!
!!
!!
!
!
!
!
!
!
!!
!!
!!
!!
!!
! !!
!
!!
!!
!!
!!
!!
!!
!!!
!!!
!!
!!
!!
!!
!!
!!
!!
!!
!!!
!
!!
!!
!
!!
!
!
!
!
!
!
!!!
!!
!!
!
!!
!!
!!
!!!
!!!!
!!
!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!!
!!!!
!
!
!
!
!
!
!!
!!
!!
!!
!!
!!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!!
!! !
!!
!
!!
!
!!
!!
!
!
!
!!
!
!
!
!
!!
!
!
!
!
!
!!
!!
!
!!
!!
!
!
!!
!!
!!
!!!
!
!
!!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!!
!!!!
!
!
!
!
!!
!!
!
!
!
!!!
!
!
!
!
!
!
!
!
!
!!
!!
!!
!
!
!
!
!
!
!
!
!!
!
!!
!
!!
!!
! !!
!!
!!
!!
!!
!
!!
!!
!!
!!
!!
!
!
!
!!!
!!
!
!
!
!!
!!
!!
!
!
!
!
!
!
!!
! !!!
!
!
!
!
!!
!!
!
!!!!!
!!
!!
! !!!
!!
!!
!!
!
! !!
!
!
!
!
!!
!
!
!
!
!!
!
!
!!
!!!
!!
!!
!
!!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!!
!!
!!
!
!
!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!
!!
!
!
!
!!
!
!
!
!
!
!!
!!
!!
!!
!!
!!
!
!
!
!!
!
!
!!
!!
!!
!!
!!
!!
!!
!
!
!
!
!
!
!!
!
!
!!
!
!
!!
!!
!!
!!
!!
!!
!!
!
!
!
!!
!!!
!
!
!!
!!
!
!
!!
!
!!
!
!
!
!
!
!
!!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!! ! !!!!! ! !!!!!!
!
!!!!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!!
!!
!!
!
!
!
!
!!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
!!
!
!!!
!!!
!
!
!
!
!
!
! !!
!
!
!
!
!
!
!
!!
!
!
!!
!
!
!
!
!!
!!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!!
!
!!
!!
!!
!!
!
!
!
!
!
!!
!
!
!!
!!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!!
!!
!!
!!
!
!
!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!
!!
!
!
!!
!!
!
!
!!
!!
!
!
!
!
!!!!
!
!
!
!!
!
!
!!
!
!!
!!
!
!
!
!
!
!!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
!!
!
!
!!
!!
!!
!!
!
!
!!
!
!!
! !!
!!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!!
!
!!
!
!!
!
!
!
!!
!
!
!
!
!
!!
!
!
!
!
!
!!
!
!
!!!!!
!!
!!
!!
!!
!!
!!
!!
!
!
!
!
!!
!
!
!
!!
!!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!!
!
!
!
!!
!
!
!
!
!
!!
!
!
!
!
!
!!
!!!
!
!
!!
!!
!
!!
!!
!
!
!
!
!
!
!!
!
!!
!!
!
!
!
!!
!!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
!!
!!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!!
!
!!
!!
!!
!!
!
!! !
!!
!
!
!
!
!
!
!!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!!
!
!
!
!!
!!
!!
!
!!
!!
!!
!
!!
!!
!!
!!
!
!!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!
!
!!
!!
!
!
!!
!
!
!!
!!
!!
!
!
!!
!
!
!
!!
!
!!
!!
!
!!
!!!
!
!!
!!
!
!!
!
!
!!
!
!
!!
!!
!!
!
!
!!
!
!!
! !!!!
!!
!
!
!
!
!!
!!
!
!!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!!
!!
!
!!
!!
!!
!
!
!
!
!
!
!
!!
!
!!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!!
!
!!
!!
!!
!!
!!
!!
!
!!
!
!!
!!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!!
!
!!
!
!
!!
!
!
!
!
!
!
!
!
!
!!
!!
!!
!!
!!
!!
!!
!!
!
!
!
!
!
!!
!!
!!
!
!
!
!!
!!
!!
!
!
!
!
!!
!!!
!
!!
!!
!!
!
!!
!!
!
!!
!!
!!
!!
!
!
!
!
!
!
!
!!
!!
!!
!!
!!
!!
!!
!
!!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!!
!
!
!
!
!
!
!
!
!!
!
!
!!
!!
!!
!!
!
!
!!
!
!!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!!
!!
!!!
!
!!
!
!
!
!
!
!
!
!!
!!
!!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!!
!!
!
!
!
!
!!
!
!!
!!
!!
!
!
!!
!
!
!
!
!
!
!
!
!
!!
!!
!!
!!
!
!
!
!
!!
!!
!!
!
!
!
!
!!
!!
!
!
!
!!
!
!
!
!
!!
!!
!
!!
!!
!!
!
!
!
!!
!!
!!
!!!!!!!
!!
!
!!
!!
!!
!
!!
!!
!!
!!
!
!
!
!
!!
!
!
!
!!
!
!!
!!
!!
!!
!
!!
!!
!!
!!
!
!
!!
!
!
!!
!!
!!
!!
!!!
!!
!!
!!
!
!!
!!
!
!
!
!!
!!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!!
!
!
!
!
!!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!!
!
!
!
!
!
!
!
!
!
!
!!
!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!!
!
!
!
!
!
!!
!
!!
!!
!!
!
!
!!
!
!
!
!
!
!
!!
!!
!!
!!
!!
!!
!
!
!
!
!!
!!
!
!!!
!!!
!!
!!
!!
!!
!
!!
!
!
!!
!
!
!
!!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!!
!!
!!
!!
!
!!
!
!
!
!
!
!
!!
!
!
!!
!!
!
!
!!
!!
!
!!
!!
!
!
!
!
!!
!!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!!!!!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!!
!
!!
!
!!
!
!
!
!
!
!!
!
!
!
!
!!!
!
!
!!!
!
!!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!!! ! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!!
!
!!
!
!!
!!
!!
!!
!!
!
!!
!
!
!!
!!
!!!
!!
!!
!!
!!
!!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!!!
!!
!!
!!!!
!
!
!
!!
!!
!
!!
!!
!
!
!
!
!
!
!
!
!
! !
!!!!!! ! !!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!!!!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
!!
!!
!!
!
!!!
!
!
!
!
!
!!
!!
!
!
!
!!
!
!!
!!
!
!!
!!
!!
!
!!
!!
!!
!!
!!!!!!!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
!
!!!
!!
!
!
!!!
!!
!!
!!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
!
!!
!!
!
!
!
!!
!
!
!
!
!
!
!
!!
!!
!
!
!!
!!
!!
!!
!!
!!
!!
!!
!!!!!
!!
!!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!!!
!
!
!
!!
!!
!
!
!
!
!!
!
!!
!
!
!
!!
!!
!
!!
!
!!
!!
!!
!!
!
!
!
!!
!
!
!
!!
!!
!!
!
!!
!!
!
!
!
!!
!
!!
!!!!
!!
!!
!!
!
!
!!
!
!
!!
!
!
!!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!!!!!
! !!
!!
!!
!!
!!
!!
!!
!!
!!
!
!
!
!!
!!
!!
!!
!
!
!!
!!
!!
!!
!
!!!!
!!
!!
!
!!
!!
!
!!
!!
!!
!!
!
!
!!
!
!!
!
!!
!!
!
!!
!!
!
!
!
!
!
!
!
!
!
!!
!!
!!
!
!!
!
!!
!
!!
!!
!!
!
!!
!
!
!!
!!
!!
!!
!!
!!
!
!
!
!!
!!
!
!! !!!!!
!!
!!
!
!
!
!
!!
!!
!!
!!
!
!!
!!
!!
!
!!
!
!!
!
!!
!!!
!!
!!
!!!
!!
!
!!
!
!
!!
!
!!
!
!!
!!
!!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!
!!
!!
!
!
!!
!
!!
!!
!!
!
!!
!
!
!!
!
!
! !!!
!
!
!
!!
!
!
!
!!
!!
!!
!!
!!
!
!
!
!
!
!!
!!
!!
!
!!!
!!
!!
!!
!!
!
!
!
!
!
!
!
!!!
!!
!
!
!
!
!!
!
!
!
!!!!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!!
!!
!!!
!
!!!
!!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!!
!!
!!
!!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
!!
!
!!
!!
!
!
!!
!
!
!
!!
!!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
!!
!
!
!
!!
!!
!
!!
!
!
!! !!! !!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!!
!
!
!!
!!
!
!!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!!
!
!!
!
!
!
!
!
!
!
!!
!
!
!
!!
!!
! !!
!!
!
!
!
!
!!
!
!!
!
!
!!
!!
!
!
!
!!
!
!!
!!!!!!
!!
!
!
!
!!
!
!!
!!
!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!
!
!!
!
!!
!
!
!
!
!!
!!
!!
!!
!
!
!!
!
!
!!
!!
!!
!
!
! !!!!!!
!!
!!
!!
!
!
!!!
!!
!
!
!
!
!
!
!
!!
!!
!!
!
!
!!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!!
!!
!!
!!
!
!!
!!
!!
!!
!!
!!
!
!
!
!
!
!
!
!!
!!
!!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!!
!!
!!
!
!!
!
!!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
!
!!
!
!
!!
!
!!
!
!
!
!!
!
!
!
!
!
!
!
!
!!
!!
!
!!
!!!!
!
!
!
!
!
!
!!
!!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!!
!!
!
!
!!
!!
!!
!
!
!
!
!
!!
!!
!
!
!!!
!!!
!!
!
!
!
!
!!
!!!
!!
!!
!
!!
!!
!!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!!
!
!!
!
!!
!
!
!
!
!
!
!!
!
!
!!
!!
!
!
!!
!!
!!
!
!
!!
!!
!
!
!
!
!
!
!!
!!!
!
!!
!!
!!
!!
!
!
!!
!!
!!
!!!
!
!!
!
!!
!!
!
!
!!
!
!
!!
!!
!!!! !!!
!!
!!!
!
!
!
!
!!
!!
!!
!!
!!
!!!
!
!
!
!
!
!!
!!
!!
!
!
!!
!
!
!!
!
!
!!
!
!!!
!!
!!
!
!!
!
!
!!
!
!
!
!!
!!
!
!!
!
!
!
!
!
!
!
!
!!
!!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!!
!!
!!
!
!!
!!
!!
!!!
!!
!
!!
!
!
!
!!
!!
!
!
!!
!
!
!
!
!
!
!
!!
!
!!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
!!
!!
!!
!
!
!
!
!!!!
!
!!!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!! !
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!!
!!
!!
!!
!
!!
!!
!!
!!!
!
!
!!
!!
!!
!!
!!
!!
!!!!!!
!!
!!
!!!
!!!
!!!
! !!!!
!!
!!
!!!
!!!
!!
!!
!!
!!
!
!!!
!!
!!
!
!!
!!
!
!!
!!
!!
!!
!!
!!!
!!
!!
!!
!
!
!
!!
!
!
!
!
!!
!!
!!
!!
!!
!!
!
!!
!
!
!
!
!!!
!!!
!!
!!
!!
!
!
!!
!!!!
!!
!!
!!
!
!
!
!
!
!
!!
!!
!!
!
!
!!
!!
!!
!!
!!
!
!!
!
!!!!!!!
!!
!!
!!
!
!!
!
!!
!!
!!
!
!!!
!!
!!
!!
!
!!
!
!
!
!!
!
!!
!
!
!
!!
!!
!!
!!
!
!
!!
!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!
!
!
!
!
!
!
!
!!
!
!!
!
!!
!
!
!
!!
!
!!
!!
!!
!
!!
!!
!!
!!!
!!
!!
!!
!!
!!
!!
!
!
!
!!
!!
!!
!
!
!
!
!
!
!
!!
!!
!!
!
!
!
!
!!
!!
!!
!
!
!!
!!!
!!
!!
!!
!!
!
!
!
!
!
!
!!
!
!
!
!!
!
!
!
!
!!
!
!!
!
!
!
!
!!
!!!
!
!!
!!!!!
!
!
!
!!
!!
!!
!!
!!
!!
!
!
!
!
!!
!
!
!
!
!
!!
!
!!
!!
!
!
!!
!!
!
!!
!
!
!!
!!
!!
!!
!
!
!!
!!
!!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!!!!!!!!!
!!
!!
!
!!
!
!
!!!
!!
!
!!
! !!!!
!!
!!
!
!
!
!
!!
!
!!
!!
!
!!
!!
!
!
!
!
!
!
!
!!
!
!
!
!!
!
!
!
!
!
!
!
!
!!
!
!
!
!!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!!
!
!
!
!
!
!!
!!!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!!
!
!!
!!
!
!
!
!!
!!
!!
!
!!
!!
!
!!
!
!
!
!!
!!
!
!
!
!
!!
!
!!
!
!
!
!
!!
!!
!!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!!
!
!
!
!
!
!
!
!!!
!!
!
!
!!!! !!
!
!!
!!
!!
!!
!
!
!
!
!
!!
!!
!
!
!
!!!
!!
!
!
!
!
!!
!!
!!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
!!
!!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!!
!
!!
!!
!
!
!!
!!
!
!
!!!
!
!!
!
!
!
!
!
!
!!
!!
!!
!
!
!!
!
!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!!
!!
!!
!!
!! !
!!!
!
!
!
!
!
!!
!
!
!
!!
!!
!
!
!
!
!
!!
!!
!!
!!
!!
!!
!
!!
!
!!
!!
!!
!!!
!!
!
!
!!
!!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
!!!
!
!!
!!
!!!!!
!!
!
! !!
!
!!!
!
!
!
!!
!!
!!
!!
!!
!!
!!
!
!
!
!
!!
!!
!!
!!
!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!!
!
!
!!
!!
!
!
!
!
!!
!
!
!
!
!
!!
!!
!!
!!
!!
!
!!
!
!
!!
!
!
!
!
!
!
!
!!
!
!
!!
!
!
!
!
!!
!
!
!!
!
!
!!
!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!
!
!!
!
!!
!!
!
!
!
!
!
!
!!
!!
!
!
!!
!
!
!
!
!
!!
!
!
!
!!!!!!
!!!!!
!!
!!
!!!!!!
!! !
!
!!!
!
!
!!
!!
!!
!!
!
!
!!
! !
!!
!!
!!
!!
!!
!!
!!!
!
!
!
!
!!
!
!!
!!
!!
!
!
!
!
!
!
!!
!!
!
!
!
!!
!
!!
!!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!!
!
!!
!
!!
!!!
!!
!!
!
!
!
!
!
!
!!
!!
!!
!
!!
!!
!!
!!
!!
!!
!
!
!!
!!
!!
!
!
!
!
!!!!
!!
!!
!!
!!
!!
!
!
!
!
!
! !!
!
!
!
!
!
!
!
!!
!
!
!!
!
!!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!!
!!
!!
!!!!! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
! !!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!!
!!
!!
!!
!!!
!!
!
!
!
!!
!!
!
!
!!
!!
!!
!!
!!
!!
!!
!! !!
!!
!!!!
!!
!!
!!
!!
!!
!!
!!
! ! !!
!!
!!!
!!!!!!!!
!!
!!
!!
!!
!!
!!
!!!
!!!!
!!!!!!! !!!
! !!
!!!!!
!!
!!
!!
!!
!!
! !
!!
!!
!!!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!!!
!!
!!
!!
!!
!!!!
!
!
!
!
!
!
!!
!!
!!
!
!!
!!
!!!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!!
!!
!!
!!
!
!
!
!
!
!
!
!!
!
!!
!
!!
!!
!!
!
!!
!!
!!!
!!
!
!
!!!
!
!
!
!
!
!
!
!
!!!
!
!!
!!
! !!
!!
!
!
!
!!
!! !!!!
!!
!
!!
!!
!
!
!!
!!
!!
!
!
!
!
!!
!
!
!
!
!
!!
!
!!
!!
!!
!
!!
!!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!!
!!
!
!
!!
!
!!
!
!!
!!
!
!!
!!!
!
!
!!
!
!
!!
!
!
!!
!!
!
!
!
!!
!
!
!
!
!
!!!!!
!
!
!
!
!
!
!
!
!
!!
!!
!!
!!
!!!
!!
!
!!
!!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!!!
!
!
!
!
!
!!
!
!
!
!!
!!!
!
!
!
!
!!
!!
!!
!
!
!
!
!
!
!
!
!
!
!!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!!
!
!!
!
!
!
!
!
!
!
!
!
!
!!
!
!!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!!
!!
!!
!
!!
!
!! !
!!
!
!!
!
!!
!
!! ! !
!
!
!!
!
!
!
!
!
!!
!
!! ! !!!
!
!
!
!!
!!
!!
!
!!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!
!!
!
!
!!
!! !!
!
!
!
!!
!!
!!
!!
!
!!
!!
!!!
!
!
!
!!
!
!
!!
!
!!
!
!
!
!!
!!
!!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!!
!!
!!
!!
!
!
!!!!
!!!
!
!
!!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!!!
!
!
!
!!
!!
!
!!
!
!!
!
!
!! !!!!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!!
!!
!!
!!
!!
!!
!
!
!!
!
!!
!!
!!
!
!
!!
!
!
!
!
!
!
!
!
!!
!
!
!!
!
!
!!
!
!
!
!
!
!
!
!
!!
!!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!!
!
!
!
!
!
!!!!!!!
!!
!
!!
!
!
!
!
!
!!
!!
!!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!!
!
!!
!
!
!
!
!!
!
!
!!
!
!!
!!
!
!!
!
!
!
!
!
!
!
!
!
!
!!
!
!!
!!
!!
!
!
!
!
!
!!
!
!
!
!
!!
!
!!
!!
!!
!
!
!
!
!
!
!!
!!
!! !
!
!
!!!
!!
!!
!
!
!!
!
!
!
!
!
!
!
!
!!
!!
!!
!!
!!
!!!!
!
!
!
!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
!!
!!
!
!
!
!
!!
!!
!!
!!
!
!!
!
!
!
!
!
!!
!!
!!
!!
!!
!!
!!
!
!
!!
!!
!!
!
!!!!!
!!
!
!!
!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!
!!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!!
!
!!!!!!
!!!
!!
!!
!!
!
!
!!
!
!!!!
!
!
!
!
!
!
!!
!!
!!
!
!
!
!
!!
!!
!!
!!
!!
!!
!!
!!
!
!
!
!
!
!!
!!
!!!!!
!
!
!
!
!
!!
!!
!!
!!
!!
!!
!
!
!
!
!
!
!!
!!
!!
!!
!
!
!
!!
!!
!!
!!
!!
!!
!
!
!
!
!
!
!
!
!
!!
!!
!!
!!
!
!
!!
!
!
!
!
!!
!!
!!
!
!
!
!!
!!
!
!!
!
!!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!!
!!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!!
!
!!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!!
!!!
!!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!!
!!
!!
!
!!
!
!!
!!
!!
!
!
!
!
!
!
!!
!
!
!
!
!
!!
!!
!!
!!
!!
! !!!
!!
!
!
!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!
!
!
!
!!
!!
!!
!!
!!
!
!
!!
!!
!
!
!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!
!!
!!
!!
!!
!
!!!!
!!!
!
!!
!
!
!!
!!
!!
!
!!
!!
!!
!!
!!
!!
!!
!!
!
!
!
!
!
!!
!
!!
!
!
!
!
!
!
!
!
!
!
!!
!!
!!
!!
!!
!
!
!
!
!
!!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!!
!
!
!
!!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!!
!
!
!
!
!!
!
!!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!!
!
!!
!!
!
!
! !
!
!
!
!!
!!
!
!
!!
!!
!!
!!
!
!
!!
!
!
!
!
!
!
!!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!!
!
!!!
!!!!!!
!
!
!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!!
!!
!!
!
!
!
!
!
!
!!
!!
!!
!!
!
!
!!
!!
!!
!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!!
!
!!
!
!
!
!
!
!
!!
!
!
!!
!!
!
!
!!
!!
!!
!!
!!
!!!!
!
!
!
!
!!
!
!
!
!!
!!
!
!!
!
!
!
!!
!!
!
!!
!
!
!
!
!!
!!
!
!!
!!
!
!!
!
!!
!
!
!!
!
!
!
!
!
!!
!!
!!
!!
!!
!
!!
!
!
!
!
!!
!
!
!!
!
!!
!!
!!
!!
!
!!
!
!
!!
!!!
!!
!
!!
!
!
!!
!!
!!
!!
!
!
!
!
!
!
!
!!
!!
!
!
!!
!
!
!!
!
!!
!
!!
!!
!
!!
!!
!!
!!
!!
!
!!
!
!
!
!
!!!
!!
!!
!!
!
!!
!
!
!
!
!
!
!
!
!
!!
!
!
!!
!
!!
!
!
!!
!
!!
!!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!!
!!
!!
!!
!!!
!
!!
!!
!
!
!!
!!
!!!!
!!
!!
!!
!!!
!!
!!
!!
!!!
!!
!!
!!
!
!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!
!!!!
!
!
!
!
!!
!!
!!
!!
!
!
!!
!!
!!
!!
!!
!
!!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!!
!!!
!
!!
!!
!!!
!
!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!!
!!
!!
!!
!!
!!
!!
!
!!
!
!
!!
!!
!
!!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!!
!!
!
!
!!!!!!
!!
!
!
!
!
!!
!!
!!
!!
!
!
!
!
!
!
!
!
F gure 6 11 The pred cted phys ca recovery durat on of bu d ngs n She by County
We mode the recovery of the e ectr c power nfrastructure by cons der ng the pr or t es set by MLGW
(MLGW 2017a) The phys ca and serv ce recovery mode ng of the e ectr c power nfrastructure s accord ng
to the approach proposed by Sharma et a (2020b) F gure 6 12 shows the snapshots of the nfrastructure
funct ona ty after 12 hours (F gure 6 12a) and 36 hours (F gure 6 12b) from the beg nn ng of the recovery
W th nom na y assumed crew s zes the e ectr c power nfrastructure recovers qu ck y
After about 32
hours of the repa r work (24 workhours per day) a cr t ca components have recovered wh e the repa r
of non-cr t ca components cont nues Due to the redundancy the substat ons w th damaged non-cr t ca
components rema n funct ona However these damaged non-cr t ca components can make the nfrastructure
more vu nerab e to the next d srupt ve event Further deta s can be found n Sharma et a (2020b)
156
(
!
(
!
(
!
(
(!
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
!
(
!
!
(
!
(
(
!
(!
!
(
(
!
(
!
(
!
(
!
(
(
!
(
!
(
!
(
(
(!
!
(
(!
!
(!
!
(
(!
!
(
(
(
!
(
(!
!
(
(!
(!
!
(!
!
(
!
(!
!
! (
(
!
(
!
(
!
!!
(
(
(
!
(
!
(
!
(!
!
(
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
( !
!
(
( !
!
(
! !
(
(
!
(!
!
(!
!
(!
(
(
( (!
!
(
( !
!
(
!
( !
!
(
(
!
(
!
(
!
(
( !
!
Substation
( Functional
!
Non-Functional
Line
Functional
Non-Functional
(
!
(
!
(
!
! !
(
(
(
( !
(!
!
(!
((
!!
(!
( (
!
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!!
(
! !
(
(( (
!
(!
!
!
(
(
!
(
!
!
(
(
!
(!
!
(
(
!
(
!
(
!
(
!
!
(
!
(
(
!
(
!
(
!
(
!
(
!
!
(
(
(!
(!
!
!
(
(
!
!
(
(
!
!
(
(
!
(
!
!
(
!
(
! !( !
(
(
!
(
!
(
(!
!
(
(
!
!
(
!
(
(
!
!
(
!
(
(
!
!
(
( (
!
!
(
!
(
(!
!
(
!
(
!
( !
!
(
!
(
!
!
(
(
!
(
(
!
(
!
(
!
(
!
(
!
(a)
(
!
(
!
(
!
!
((
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
(!
!
(!
!
(
(!
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
(
(
!
(
(
(!
!
(!
!
(
!
(
(
(!
(
(
!
(!
!
(
!
(
(!
(!
!
(!
!
(!
!
(
!
(!
!
( !
!
(
(
!
(
!
(
!
(!
!
(
(
!
!!
(
(
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
( !
!
(
!
(
!
(!
!!
(
(
(
!
(!
!
((
( !
!
( !
!
(
(
!
(
!
!
(
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(
!
Substation
( Functional
!
Non-Functional
Line
Functional
Non-Functional
(
!
!
(
(
!
(
!
(
!
(
!
(
!
!
((
!
(( !
!
(
(!
!
( !
!
(
(
( !
(
(!
!
!!
(!
( !
( (
! !
(
(
!
(
!
!
(
(
!
(
!
(
!
!
(
(
!
(!
!
(
(
!
(
!
(
!
(
!
!
(
(
!
(
!
(
!
(
!
(
!
!
(
(
(!
(!
!
!
(
(
!
(
!
!
(
(
!
(
!
( !
!
! !
(
(
(
( !
!
(
(!
!
(
(
!
!
(
!
(
(
!
!
(
!
(
(
!
!
(
( (
!
(
!
!
(
(!
!
(
!
(
!
( !
!
(
!
(
!
!
(
(
!
(
(
!
(
!
(
!
(
!
(
!
(
!
(
!
(b)
Figure 6.12: The predicted functionality of the electric power infrastructure after (a) 12 hours and (b) 36
hours from the beginning of the recovery
Similarly, we model the recovery of the potable water infrastructure, considering the combined effects of
the damaged electric power infrastructure, damaged industrial and commercial buildings, and households’
dislocation due to the building damage. Figure 6.13 shows the snapshots of the infrastructure functionality
after 3 days (Figure 6.13a) and 21 days (Figure 6.13b) from the beginning of the recovery. After about
21 days of the repair work, with 16 workhours per day, the functionality of the infrastructure completely
recovers.
157
(a)
(b)
Figure 6.13: The predicted functionality of the potable water infrastructure after (a) 3 days and (b) 21 days
from the beginning of the recovery
6.5.7
Modeling the recovery of society
As a measure of societal recovery, we consider the time evolution of the capability of being sheltered.
We use the functionality recovery of buildings to quantify the opportunity of having access to permanent
residence. The recovery curve of each building represents the instantaneous probability that the building
is physically recovered, and the pre-disaster demand for potable water and electric power is met. Figure
6.14 shows the snapshots of the estimated probabilities that buildings will be functional (i.e., structurally
sound, and with at least 95% rated voltage and 15 psi water pressure) over 120 day period aftermath of the
earthquake. As expected from the earlier results, the functionality of the electric power infrastructure governs
the immediate impact and results in complete loss of functionality due to the blackout. The governing time
horizon of the potable water infrastructure is up to several weeks, which can be seen from the functionality
state after 30 days. In general, the physical recovery of the buildings controls the overall recovery duration.
The obtained results indicate that different physical systems have different recovery horizons and, thus,
control regional resilience at different time scales.
158
P[functional]
High : 1
P[functional]
High : 1
Low : 0
Low : 0
Immediate impact
After 1 day
P[functional]
High : 1
P[functional]
High : 1
Low : 0
Low : 0
After 7 days
After 30 days
P[functional]
High : 1
P[functional]
High : 1
Low : 0
Low : 0
After 60 days
After 120 days
Figure 6.14: The estimated probability of buildings’ functionality over 120 days after the earthquake
To visualize the spatial variations of the recovery progressions among different communities and, thus,
explore global justice, Figure 6.15 shows the demographic data in Shelby County. Comparing the demographics with the functionality recovery patterns in Figure 6.14 reveals that Hispanic and Black population
groups are generally experiencing a slower recovery in terms of the capability of being sheltered. Considering
the average impact over the entire county would underestimate the actual societal impact. The results also
159
show that the scenario earthquake may exacerbate social differences and inequalities. Therefore, fairness in
distributions of the impact and recovery should be accounted for in risk evaluation.
Black Population [thousands]
0 - 0.1
0.2 - 0.5
0.6 - 1
1.1 - 6
Hispanic Population [thousands]
0 - 0.1
0.2 - 0.5
0.6 - 1
1.1 - 2
(a)
(b)
Figure 6.15: Population distribution of (a) Black, and (b) Hispanic in Shelby County
The continued loss of essential services can cause further population dislocations in addition to the initial
ones due to the direct physical damage to the buildings (Guidotti et al. 2019). We consider that lack of access
to electric power or potable water for three days following the earthquake can cause additional dislocations
(Petersen et al. 2020). Figure 6.16 shows the estimated additional dislocations. The filled circles in the figure
indicate dislocated households, and the size of the circles is proportional to the households’ population. We
note that the additional dislocation leads to a reduction in the water demand, accelerating the recovery of
the water infrastructure. This condition does not apply to the power infrastructure since it recovers in less
than three days.
160
!
!
!
!
!
!
5
10
25
50
150
>150
!
!
!!!! !! !
! ! !
!!
!
!
!!
!
!!!!!!
!
!
!!
!
!
!!
!
!
!
! !
!
!!!!!
!!!
! !!!!!
!!!
! ! !!
! ! !!!
!
!!!
!!!
!
!!! !
!!
!
!!!
!
! !
!
!
!
!
!! !! !!
!!
!!
!! ! !!
!
! !
!
!
!!
!
! !
!!
!
!
!! !!
!!
! !!
!
! !
! !!!
!!
!! !
!
! ! !!!
!
!
!! !
!!! !
!
!
!
!
!
!
!!
!
!
!!
! ! ! !! !
!!
!!
!
!!
!
!!!
! !!
!!! ! !
!
!
!
!!
!
! !! !
!!
!!
!
!
!
! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!! !
!!! !
! !
! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !!
!
!
! !!
!
!
!!
!
!
!!
!
!
!
!
!
!
!!
!! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!!! !
!
!
!
!
!
!
!
! !
!
!
!
!!
!
!!
!!!
!! ! ! !!
!
! !
!
!
!
!
!
! ! ! !!!! ! ! !!! !
!! !
!
!!! !
!
!!!!
!
!!
!
!
! !
! !!
!
!!
! !
! !!
!!! !!
!
!
!
!!
!
!!!
!
!
!
!
!
!!
!
!!
!
!!
!
!
!
!!
!!
!
!
!
!!
!
!
!
!
! !!
!
!!
!!
!
!
!
!!!
!
!!
!!
!!!
!
!
!
!
! !!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!!
! !
!
!!
!!
!
!
!
!
!
!
!
!! !!
!
!
!
!!!
!
!
!
!
!
!
!
! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!! !
!
!!
!
!
!
!!!
!
!
!!
!!!
!
!!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!!
!
!
!
!
!!!
!
!!!!
!!
!!
!
!!
! ! !!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
!
!
!
!!
!!!
!! !! !!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!!
!!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!! !!
!
!! !!
!! !
!! !
!!
!!! !
!
!
!
!
!
!
!
!
!
!!!!
!
!!!!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
! ! ! !! !
!
!
!!
! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
! ! !
!
! !!
!
!
!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!!!
! !! !
!
!
!
! !!
!
!
!
!
!
!
!
!
!
!!!
!
!
!
!
!!
!
!!
!
!
!
!
!
!!
!
!
!
!
!
!
! ! !!!
!
! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !
!! !
!!
!
!
!
!
!
!
! !
! !
!!
!
!
!
!
!
!
! !
!
!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!! !
!!
!
!!!!!! !
!
!
!!
!
!
!
!!
! !!!
!
!
!
!!! !
!
!
!
!
!
!!
!
!!!
!!
!
!!
!
!
!
!
!
!
!
!
!
!! !!
!
!
!
!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !! !! !
!!!
! !! !!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !
!! !!
!
! !
!!
!
!
!
!
!
!
!
! !
! ! !
!
!
!! !
!!
!
!
!
!
!
!
!
! !
!
!
!
!
!
!!
! !
!!!
!
!
!
! !!!!!
!
!
!
!
!!!
!!
!
!
!
!
!
! !
!!
!
!
!
!
!
!
!!
!!!!
!
!
!
!
!
!
!
!
!
!
!
!
! !!
!
!
!!
!
!
!
!
!!!
! !!
!
!
!
! !
!
!
!
!
!! !!
!
!
!!
!
!!
!
!
!! !
!
!
!
!
!
!!!
!
!
!
!
!
!
!
!
!
!!!!!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
! !!!
!
!!
!
!
!!
!!!!
!
!
!! !!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
! !!
!
!
!
!
!
!
!
!! !
!!
!!
!
!
!!
!
!
!
!
!
!
!
!!!!!!
!
!
!
!
!!
!!!! !!!
!!
!!
! !!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!! !
!
!!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!!!!!!
!
!!!!
!
!
!
!
!
!
!
!
!
!!!
!
!!
! !
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !
!
!
!
!
!
!!
!!
!
!
!
! ! !
!
! !
!!
!
!
!
!
!
!!
!
!!
!
!
!
!
!
!!!!!!
!
! !!
!
!!!
!
!!!! ! !!
! !!
!!!! !
! !!
!
!!! !
!!!! !
!!
!
!
!!! !
!
!!!!
!
!!! !
! ! !!! !!!
!! !!
!!
! !!
!
!
! !!
!
!
!
!
!
!!!
!
!!
!
!
!
!
!!
!! !
!!!!
!
!!! !!
!
!!!
! !!!!!
!!
!!
!! !
!
!
!! !!
!
!
!
! !!
!
!
!
!! ! !
!
!
! !
!
!
!
!!
!!
!
! !!!!
!
!!
!
!
!!!!
!!!!
!!!!!!
!!
!
! !
!!
!
!
!!
!! !
! !
!
!
!
! !! !
!!
!!!
!!
!
!
!!
!
!!
!
!! ! !
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !
!
!
!!
! !! !!
!
!!!
!
!! !
!
!
!!!!!
!!
!!!!
!!!
!!
!
!!!!
! ! !!
!
!
!!
!
!
!
!!
!
!
! !
!
!
!!
!
! !
! !!!!! ! !! !! ! !
!
!
!!
!
!
!
!
!
!
!
!
!
!!!!
!!!
!
!
!
!!
!
!
!
!
!!!
!
!!!
!!
!
!
!
!
!! !!!!!
!
!
!
!
!
!!
!!
! !!
!
!
!
!
!
!
!
!
!!!
!!
!
!!!
!!!!!!!! !
!
!
!
!
!
!
!
!
!
!!!
! ! !
!!
!
!
!
!!
!
!!
!
! ! !!!
!
!
!!!
!
!
! ! ! !!! !!
!!
!! !
!
!!
!!!!!!
! !!
!
!
!! !
!!!!!
!!! ! ! ! !!
!
!
!!
!!
!
!!
! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!!
!
!
!
!
!
!
! !!!
!!
!! !
!
!!
!
!
!
!
!
!!! ! !
!
!!
!
!!!
!
! !!
!
! !
!!
!! ! ! !
!!
!
!
!
!!!
!!
!!
!!
!
!
!!
!
!!
!
!
!
!
!
!! !
!
!
!
!
!! !!
!!
!
!!
!!
!
!
! !!
!!
! ! !!!
!
!
!
!
!!
!
!
!!
!
!!
!
!!
!
!
!
!!
!
!
!!
!
!
!
!!
!!
! !
!!
!!
!!
!!
!! ! !
!
!!
!
!
!!!! !
!!
!
!
!
!
!
!
!
!! !!! ! !! !
!
!!!!
!
!
!
!
!
!
!
! !!
!!
!!
!
!
!
!!!
!!
!!!!!! !
!
!
!
!
!
!
!
!
!!
!!
!!
!!
!
!
!
!!!!
!!
!
!!!
!
!!
!
!
!
!!
!
!!!!!
!
!!!!!
!
!
!
!
!
!
!!!
!
!!
!
!!!!!
!
!
!
!
!!
!
!
!!
!
!
!!! !
!
!!!
!
!!!
!! !! !
!
!
!
!!
!! !
!!
!
!!
!!
!
!
!
!
!!
!!
!!!!!
!!
!
!!!!
!!
!!
!
!
!
!!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!!! !
!
!!!!!
!!! !!!
!!!
!
!!! !
!!
!
!
!
!
!
!
!!
!
! !
!!
!
! !
!
!
!!
!!!
!
! !! !
!
!
!
!
!! ! !!!!
!
!! !
!
!! !
!
!
!
!!
!
!
!
!!
!
!
!
!
!
!!
!
!!
!
!
!! ! !!
!
!!
!! !
!
!
!
! !!
! !!!! !
!!
!
!
!!
!
!!
!
!!
!
!
!
!
! !!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!!
! !
!
!
!
!
!!
!
!
!
!
!
!
!
!
!!
!!
!!
!
!!
!
!
!
!
!
!
!
!
!
!!
!
!!!
!
!!
!
!
!!!!
!!
!!
!
!
!
!
!!
!! !
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
! !
!
!!!
!
!
!
!
!!
! !
!
!
! !
!
!
!
!
!
!
!
!
!! !
!
!!!
!!
!! !!!
!
!
!
!
!
!
!
!
!
!
!
! !!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!!
!
!
!
!!
!
!
!
!
!
!
!
!!!
!
!
!
!
!
!
! !!!! !
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
!
!
!
!!!
!
!
!
!
!!
!
!!
!
!
!
!!!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !!
!!
!!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!!! !
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!!
! !
!
!
!
!
!
!
! !!
!!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!!
!
!
!!
!
!
!!
!
!
!
!
!
!
!! !!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!!
!!
!!
!
!!
!
!
!!!!
!!
!
!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!! !!
!!
!!!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
! !!!!
!
!!
!
!
!!!
!!
!!
!
!
!
!
!
!
!!!
!
!
!
! ! !!
!
!!
!
!
!
!
!
!
!!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
!!
!
!!
!
!
!
!!
!
! !!!!
! !
!!
!
! !
!! !
!
!!
!
!
!
!
!
! !!
!!
!
!!
!
!
!
!
!
!!
!
! !
!
!
!
!
!!
!
!
!
!! ! !
!
!
!
! !!
!!
!
!
!
!
!
!
!
! ! !
!
!
!!
!!!!
!!
!
!!
!
!!
!!!!!
!
!
!! !!
!
!!
!
!
!
!
!
!
!
!
!
!
!! !!!
!
!
!
!
!! !
!
!
! !!
!
!
!
!
!
!! !
!
!
!
!
!
!
!
!!!!!!
!
!
!
!
!!
!
!
!
!
!
!
!
! !!
!
!
!
! !!!
!
!
!
!
!
!
!!
!
! !!
!
!
!
!
!
!
! ! !! !
!
!!!!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!!!! !
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! ! !!
!
!
!!
!!
!
!
!! !
!
!
!
!
!!
!
!
! !!
!!!!
!
!!!!
!
!
!
!!
!!
!
!!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!! !
!
!
!
!!
!
!
!
!
!
! !!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!!!
!!
!!
!!
!!
!
!
!
!
!!
!
! !
!
!
!
!
!!
!
!
!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
!!
!!
!
!
!
!
! !!
!!
!
!
!
!!!
!
!
!
!
!
!
!!!!
!
!
!!
!
!
! !!
!
!
! !!
!!
!
!
!
!
!
!
!
!
!
!! !!
!
!
!!
! !
!
!
!
!!
!
!!
!
!!!
!!
!
!
!
!
!
!
!
!!
!
!
!
!!
!
!
!
!!
! ! !!
!
!
!
!!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
!
!
!!
!!
!!
!! ! !!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
! !
!!
!
!!
!!!!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
!
!!
!
!!
!
!
!!
!
!!
!
!!!!
!
! !
!
!
!
!
!
!
!
!
!
!
!!!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!!
!
!
!
!!!
!
!!!
!
!
!
!
!!
!!!!
!
!
!
! !
!
!
!!
!!
!
!!
!!
!! !
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
!!
!
!!
!!
!
!
!
!!!!!!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!!
!
!
!
!!
!
!
!!
!!!! !!
!
!
!
!
!
!!!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!!
!!
!
!
!!
!
!
!
!!
!
!
!
!
!
!
!
!!
!
!
!
! !
!!!!
!!
!
!
!
!
!
!
!
!!!
!
!
! !
!
!!
!
!
!
!
!
!
!
!
!
!!
!!
!
!
!!!
! !
!
!
!
!
!
!!
!
!!!
!
!
!
!!
!
!
!
!
!
!
!!
!! !!
!
!!!
!
!
! ! !!
! !
!!
!!
!
!
!
!
!
!
!
!
!
!
!!!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!!
!
!
!! !!
!
!
!
!
!
!
!
! !!
!
!
!
!
!
!
!
!
!
!!
!
!!
!
!!
!
!
!
!
!!
!!
!
!
!
!
!
!
!! ! !
!
!
!
!
!!
!
!
!
!!
!
!!!!
!! !
!
!!
!
!
!!!!
!
!
!
!!
!!!!!
!
!
!
!
!
!
!
!
!
!!
!! ! !
!!
!
!!
!
!
!
!!
! !!
!!
!
!
!
!
!
!
!
!!!
!
!
!
!
! !
!!
!!!!
!!!
!!
!
! !
!
!
!
!
!!
!
!
!
!
!
!
!
!
!!
!
!
!
!!
!!!
!
!
!
!
!
!
!
!!
!
!!!
!
!
!
!!
!
!
!
!
!!
!
!!
!! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!!
!
!
!!
!
!
!
!!!
!!
!!
!!
!
!
!
!
!!!
!
!
!
!
!!
!!
!
!
!
!!
!!
!
!
!
!!
!!! !!!!
!
!! ! !
!!! !
!
!
!!
!!
!
!
!
!!
!
!
!
!
!
!
!!
!!!!
!!!
!! !
!!
!
!
!!!
!
!!
!
!
!
! ! !!! !
!!!
!
!!
!! !!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !
!
!!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!!!!
!!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!!
!
!!!!
!
!
!
!
!!
!
!
!
!
!!!
!
! !
!
!!!
!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!! !!!!!!!
!!
!
!
!
!!!!!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!!
!
! !!!!!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!!
!!
!
!
!
!
!
! !!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!!
!
!!
!
!
!
!
!
!!
!
!
!!
!
!
!
!
!!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!! ! !! !!
!
!
!
!
!
!
!!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
!
!!!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!! !!!
!
!
!
!!!
!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
!
!
!
! !!!!!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
! !! !
!
! !
!
!
!
!
!
!
!
!
!!!
!! !!
!
!
!
!
!
!
!
!
!!!
!
!
!!
!
!
!! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!! ! !
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!
!
!
!
!
!! !
!
!
!!!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!!!!!
!!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
! ! !!
!! !
!!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!!
!!
!!! !!!
!!!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !!
!
!!
!
!
!
!
!
!
!
!
!
!
!!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!!!
!
!!
!
!
!!
!!!
!
! !!
!
!!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!!!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!!
!
!!!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!!
!!
!
! !!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !! !!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!! !
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!!
! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
! !!!! !
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!! !!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!!
!!
!!!!
!!!
!! !
!
!
!
!!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!!
!
!
!
!
!!
!
!
!
!
!!
!! !!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!!
!!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!!
!!!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!!!!
!
!
!
!
!
! !!
!
!
!
!
!
!
!
!
!
!!
!
! !
!
!
!
!
!
!!
!
!
!
!
!
!
!
!! !
!
!!
!
!
!
!
!
!
!
!
!
!
!!
!
!!
!
! !!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!!!!!
!
!
!
!
!
!
!
!
!
!!
!!
! !
!!
!
!!
!
!
!
!!
!! !
!!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!!!!!
!
!
!
!
!
!
!
!!
!!
!
!
!
!
!
!!!
!
!!
!! !
!
!
!
!
!
!!
!!!
!!!
!
!
!
!
!
!
!!
!
!
!
!
!! !
!
!
!
!
!
!!
!!!
! !!!
!
!
!
!
!
!
!
!
!
! !!!
!
!
!
!
!
!!
!
!
!
!
!!!
!
!
!
!
!!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!! !
!
!
!
!
!
!
!
!!!!
!!
!
!!!
!!
!
!
!!
!
!
!!
!! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!!
!
!
!
!
!!!
!
!
!
!
!
!
!!
!
!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!!
!
!!!
!
!
!
! !
!
!
!
!!
!
!
!!!
!
!
!
!!
!!
!
! ! !!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!! !!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!!
!
!
!
!
!
!
!!
!!
!
!
!
!
!!!
!
!
!
!
! ! !!!!!
!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !
!
!
!
!
!
!!
!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!!!!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!!!! !!!
!
!
!
!!
!
!
!
!
!
!!
!
!
!!!!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
! !
!
!!
!
!!
!
!
!
!
!
!
!!
!!!
!
!
!
!
!
!
!
!
!!!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
! !
!
!
!
!
!! !
!
!
!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!!
!
!
! !
!
!
!
!
!
!
!!
! !! !!
!!!
!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!! !
!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!!
!
!
!!
!! !
!!!!
!
!
!! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!!
!
!
!
!!
!
!
!
!
!!
!
!
!
!
!
!
!!
!
!!
!
!
!
!
!
!! !!
!
!!!
!
!
!
!!!!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!!
! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
!
!
!
! !
!
!
!
!
!!!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!!
!
!
!
!
!
!
!
!
! !!!!!!
!!
!!!
!
!
!
!
!
!
!
!
!!!
!
!
!
!
!!!
! ! !!
!!
!
!
!!! !
!!!!
!
!!
!! !
!
!
! !!
!
!
!
!
!
!
!
!
!!
!!
!
!!!
!
!
!
! !
!
!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!!
!
!!!
!!
!!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
! !!
!
!!
!
!
!!!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
! !
!
!
! ! !!!
!!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!!! !!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!!!
!
!!!
!
!
!
!
!
!
!
!!
! !!!
!
!
!!
!!
!
!
!!!!
!
!
! !!!!! !
!
!!!
!!
!!! !!!!
!
!
!
!
!
!!!!
!!
!
! !
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
! ! !! !!! !! ! !
!
!!!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!!
!!!!
!
!
!
! !
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
! !!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!!
!!
!!!
!!
!!
!
!
!!
!
!
!
!
!
!!
!
!
!!!
!
!
!! !!
!
!!
!
!!
!
!
!
!
! !! !
!
!
!
!!
!!!
!
!
!
!
!
!
!!!
!
!
! !! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
! !
!!!
! !!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!!
!
!
!
!
!
!
!
!!
!
!
!!
!
!
!!
!! !
!!!
!!
!
!
!
! !
!
!
!
!
!
!
!
!! !
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!! !
!
!
!!
!
!
!
!!
!
!
!
!!
! !! !!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! ! !!!!!
!
!
!
!
!
!!!!
!!
!
!
!
!! !
!
!!
!
!
!!!
!
!
!!!
!!!!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!!!!
!
!
!!!
!!
!!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!
!! !
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!! !
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
! !!
!!!
!!! !!!!
!
!
!
!
!
!
! !!
!!
!
!
!
!
!
!
!
!
!
!
!! !
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!!!
!
!! !
!
!
!
! !!
!!
!
!
!
!
!
!
!!!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
!!
!!! !!
!!!
!
!
!
!!
!
!
!
!
!
!
!!!!
!
!
!
!
!
!
!
!
!! ! ! !!
!
!
!
!
!
!
!
!
!
!
!
!! !!
!
!
!
!
!
!
!
!
!
!
!!!
!!!
!
!
!
!
!
!
!
!
!
! !
!!
!
!
!
!
!
!
!!!!
!
!
!
!
!
!!
!!
!
!
! !!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
!
!
!
!!
!
!!
!
!
!
!!!!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!! !
!!!!
!
!
!
!
!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
!
! !
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!!!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
! ! !!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
! ! !!
!
!
!!!
!
!
!
!
!
!!! !
!!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!!! ! !! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!!!
!
!
!
! !
! !! !!!!
!
!!
!
!
!
!
!
! !
!!
!
!
!
!! !
!! !
!
!
!
!
! !! !
!
!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
!!
!
!!
!
!
!
!
!
!!
!
!
!
!
!
!
!! !!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!!
!
!!
!!!!
!!
!
!
!!
!
!
!
! ! !!
!
!
!
!
!
!
!
!!
! ! !!
!
!!!
!
!!
!
!
!
!
!!!
!!!!!!! !
! !
! ! !
! !!
!
!! ! !
!
!
!
!
!
!
!!
!
!!
!
!
!
!
!
!
!
!
!
!!!!
!!
!
!
!!
!
!
!!
!
!
!
! !!!!
!
!!
!
!
!
!
!
!
!!
!
!
!
!!
!
!
!
! !!!
!!
!
!
!
!
!
!
!
!
!!
!
!
!!!!
!
!
!
!!
!
!
!
!!
!
!!
!
!!!!!
!
!
!
!
!
!! !
! !!
!
!!!
!
!
!
!
!
!
!!
!
!
!
!!!!!!
!!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !
!
!
!
!
!!
!
!
!
!
!
!
!
!! ! !
!
!!
!!! !
!
!!
!!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!! ! !
!! !!!! !!!!!
!
!!!
!!
!!!! !!
!
!
!
!
!
!
!
!
!
!
! !
!!
!!
!
!
!
!
! !!!!
! !
!!
!!!
!
!
!
!
!
!
!
!
!
!
!
!!!!! !
!
!
!
!!!
!
!
!
!
!
!
!
!! ! !!
!
!!
!
!
!
!
!
!
!
!
!
!!
!
!
!!
!!!
!!! !
!
!
!!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
!! ! !!
!
!
!
!
!
!
!
!!! ! !
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!!!
!!
!
!
!!
!!
!
!
!!
! !
!
!
!
!
!
!! !
!
!!
!
!!!
!
!
!
!
!
!
!
!
!!!
!
!
!
!
!
!
! !
!
!!
!
!
!
!!!!!
!
!
!
!
!
!
!!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!!!
! !!! ! !
!
!
!
!
!!! ! !!!
!
!
!
!
!
!
!!
!
!
!
!!!
!
!
!!
!
!
!
!
!!
!
!
!
!
!
!!!
!
!
!
!
!!
!
!
!
!
!
!!
! !!
!
!
!
!!
!
!
!
!!
!!
!! !
!
!
!
!
!
!!
!!!!
! !!
!
!
!
!
!
!
!
!
!
!! !
!
!
!
!!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!!
!
!
!
!
!
!!!
!
!
!!!
!
!
!
!
!!! !
!
!!!
!
!
!
!
!
!
!
!
!
!!!!
!
!
!
!
!
!
!
!
!! !
!!!
!!
!
!
!!
!
!
!
!
!
!
!
! !
!
!
!
!!!
!
!
!!!
!! ! !
!
!
!
!
!
! !
!
!
!
!!
!
!
!
!
!
! !
!
!
!
!
!
!!
!!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!!
!!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !
!
!
!
!
!
!
!
!
!
!
!
!!!
!!
!
!
!
!
!
!
!
!!!
!
!
!
!
!!
!!!
!
!
!
!
!
!
!
!
!
!
!
! !!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !! !!
!!
!
! !!
!
!
!!!
!!!
!
!
!
!
!
!
!
!
!
!
!
!!
!!!!!!!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
! ! !
!
!
!
!
!! !!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!! !!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !!
!
!
!!
!
!
!
!!!!
!!
!
!!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!!!
!! !!
!
!
!
!
!!! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
! !!!
!
!
!
!
!
!
!!
!!
!!
! !!
! !!!
!
!
!
!
!
!
!
!!
!!
!!
!!!
!
!
!
!
!
!
!!
!!
!
!
!
!!
!
!!!!!
!!
!
!
!
!
!
!
!
!! ! ! !
!
!
!!
!
!!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!!
!
!
!
!!
!
!
!!
!
!
!!
!
!
!
!
!
!
!
!!
!
!
!
!
!!
!
!
!
!
!!
!
!!
!
!
!
!
!
!!
!!
!!
!
!!
!!
!
!
!!
!
!!
!
!!
!
!
!!!
!!!
!
!
!!!!
!
!
!
!
!
!!
!!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!
!!!
!!
!
!
!! !!
!
!
!!
!
!
!
!! ! !!!
!
!
!!
!
! !!
!
!
!
!
!
!
!!!
!
!
!
!
!!
!!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!!
!!!! !!
!
!!
!
!
!
!
!
!
!
!!
!!
!
!
!
!
!
! !!
!
!
!!
!
!
!
!
!
!
!
!!
!
!
! !
! !
!
!
!
!!
! !!
!!!!
!
!!! !!
!!
!
!!!
!!
!
!!
!!!
!!
!!
!
!
!!
!
!
!
!!
!
!
!
!!
!!
!!
!
!
!
!!
!!
!
!!
!
!!
!!! !
!
!!!
!
!!
!
!
!
!
!
!!! !!
!
!
!
!
!!
!!
!
!
!
!
!
!!!!
!
!
!
! !
!
!
!
!!!
!
!
!
!!!! !! !!!!!
!
!
!
!
!
!
!
!!!
!
!
!
!!
!
!
!
!! !
!
!!
!
!!!!
!!
!
!
!
!
!!
!!
!
!!!
!
! !!
!
!
!
!
!
!
!!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!! !
!
!
!
!
!
!! !
!
!!!
!! !
!
!
!!
!
! ! !! ! !
!
!!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
! !!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!!!!
!
!!
!
! !!
!
!
!
!
! !! !
!
!
!
!
!!
!
!
!!
! ! ! !!!
!!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!!
!
!
!
!
!!
!
!!
!!
!
!!
! !!
!
!
!
!
!!
!!!
!
!
!
!
!!
!
!!
!
!
!
!
!
!
!
!
!
!
! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!!
!
!!
!
!
!
!
!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
!
!
!!
!!
!!
!!
!!! !!
!!!
!
!
!
!
!
! !
!
!
!
!
! !!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!!
!!
!
!
!!
! !
!
!!
!!
!
!
!
!
!
!
!! !!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
!
! !!!!!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
!!!
!!
!!
!
!!
!!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!! !
!
!
!
!
!
!!
!
!
!
!
!!!
!
!
!
!
!!!!!! !!
!
!
!
!
!
!
! !
!
!
!
!!! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!!
!!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!!
!! !
!
!!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
!
!!!
! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!!
!
!
!!
!
!!!
!!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
!
!
!!!
!
!
!
!
!! ! !
!
!
!
!
!
!
!
!
!
!
!!! !
!!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!!!!
!
!
!
! !
!!
!
!
!
!
!
!!
!!!
!!
!
!
!!
!
!! !!
!
!
!
!
!
!
!
!
!
!
!!
!
!
! !
! ! !!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!!
!
!
!
!
! !!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!!
!!
!
!
!
!
!
! !!
!
!!
!
!!
!!
!
!
!
!
!
!!!
!
!
!!!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
! !!!
!
!
!
!!!
!
!
!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!
!
!!
!
!
!!!
!
!
!
!
!
!
!!!!!
!
!
!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
! !!
!
!
!
! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! ! ! ! !!!!
!!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
! !
!
!
!
!
!
!
!
!
!
!
!
!
! !!
!!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!
!
!!!
!!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!!!
!
!
!!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!!
!
!
!
!
!
!
!
!
!
! !
!!
!!
!
!
!
!
!
!
!
!!
!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!!
!
!
!
!
!!!
!
!
!
!
!
!!
!!!!!
! !
!!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!!
!
!!!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
! !!!!!!!
! !! !!!!!!
!
!
!
!!!
!!
!
!
!
!
!
!
! !!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!!!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!
!!!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!!!
!
!
!
!
!
! ! ! !!! !
!
!
!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
!!!
!
!
!
! !
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!! !! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
! !!! !
!!!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!!!!!
!!
!!!!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
! !!
!
!
!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!!!!!
!
!!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!!!
!
!
!
!
!
!
!
!!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!! !! ! ! ! !
!!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!!! !!
!
!
!!! !!
!
!
!
!
!
!! !! ! !
!!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!!
!!!
!
!
!
!
!
!
!!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!!
!
!
!
!
!
! !! !! ! !
!
!
!
!
!
!
!!!!
! !
!
!
!
!
!
!
!
!
!
! !!!!!
!
!
!
!!
!
!
!
!
!!
!
!
!
!
!
!!
!
! !
!
!
!
!
!
!
!
!!!!!!!!
!
!
!!!!!
!!
!
!
!
!
!!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!!! ! !
!
!
!
!!
!!
!
!
!
!!
!!!!
!
!
!
!
!!
!
!!
!
!
!
!
!
!
!!!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!!
!
!
!
!
! ! !
!
! !!!!!
!
!
!
!
!
!
!
!
!!
!
! ! !!
!!
! !
! !
!
!
!
!
!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!!
!! !
!
!
!
!
!
!
!
! ! !!!
!
!
!
!
!
!
!
!
!
!
! !!
! !
!!
!
!!
!
!
!
!
!
!
!
!
!
!
!
! !!!
!
!
!
!
!
!
!
!
!!
!
!!
!
!
!
!!
!
!
! !
!
!
! !
!
!! !
!
!!
!!
!!
!
!
!
!
!
!
!
!!
!
!
!!!!!
!
!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
!
!
!!!
!
!
!!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!!! ! !
!
!
!
!
!
!!
!
!
! !!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!!!
!! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
! !!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!!
!!
!
! !!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!!
!
!
!
!
!
!
!
! !!
!!
!! !
!
!
!
!
!
!
!
!
!
!
!! !
!!!! !
!
!
!
!
!
!
!
!
!
!
!
!
! ! !! !
!
!
!
!
!
!
!
!
!
!
! !!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
!
!
!
!
!!
!
!
!
! !!!!
!
!
!
!
! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
! !
! !!
! ! !!
!!
!!
!
!!! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !
!
!
!
!
!
!
!!
! !
! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!!
!
!!
!
!
!
!
!
!! ! !
!
!
!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!! !
!
!
!
!
!
!
!
!
!! !!
!!
!!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !!! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!! !!!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
! !!! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!! !! !
!
!
!
!
!
! !!
!
!
!
!
!
!
!
!
!
!
!
! !!!
! ! ! ! !! ! !
!
!
!
!
!
! ! !
! !!!!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!!
!
! ! !!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!
!
!
!
!
!! !
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !!!!
!
!
!
!
!
!
!
!
!!
!
!!
!
!!!!
!
!
!
!
!
!!
!
!
!
!!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
! !
!
!!!
!
!
!
!
!
!!
!!
!
! !
!
!
!
!
!
!
!! ! !!
!
!
!
!
!
!
!
!
!
!
!
!
!!
! !
!
! !!
!!!!! ! !!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!!
!
!
!
!
!!
!
!
!
!
!!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !!
!!
!
!!!
! !!
!
!
!
!!
!
!
!
!
!
!
!
!
!!
!
!!!
!
!
!
!
!!
!
!
! ! !! !
!!! !
!
!
!!
!
!
!
!
!
!
! !!!
!!
!
!
! !!!!!!
!
!!
!
!
!
!
!
! !!
!
!!
!!
!
!
!
!!
!!
!!
!!!
!
!!
!
!
!
!
!!!
!
! !!
!
!
!
!
!
!
!!!
!
!
! !
! !
!
!
!
! !!
!
!
!
!
!
!
! !!!!!!
!
!
!!
!
!
!
!
!
!
! !
!
!
!
!
!
!
!
!
!!!
!
!! !
!
!!
!
!
!
!
!
!
! !
!
!
!!
!!
! !!
!!!!!
!
!
!!
!
!
!
!
!!!
!! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!!
!
!
!
!
!
!
! !!
!!
! !
!
!
!
!!
!
! !
!! !
! !!! !! !!!! !
!!
!
!!!!
!
!!
!
!
!
!!
!!
!
!! ! !!!
!!!!
!
!
!
!
!
!
!
! ! !! ! !! ! ! !
!!
!!
!
!
!
!
!
! !!
!
!
!
!!
! !! ! !! !!
!
!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
! !
!
!! !
!
!
!
!
!
!
!
! ! ! !
!!
!
!!!
!!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!
! !!! !! !
!
!
!
! !
!
!
!
!
!
!
!
!!! !! !! !!
! ! !
!
!
!!!!! !!
!
!
!
! ! !!
! !!
!
!!
!
!
!
!
! !
!
!!
!
!
! ! !
!
!
!!!
!
!!
!
!
!
!
!
! ! !
!
!
! !!!!
!
!
!
!
!
!
!
!
!
!
!
!
! !!
!
!
!
! !
!
!
!
!
!!
!!
!
!!
!
!
!
!
!
!
!
! !!!! ! !
!
!
!
!
!
!
!!!
!!
!
!!!!!
!! !
!
!!
!
!
!!
!
!! !!
!
!! !
!
!!
!!!
!
!
!
!
! !!! !!
!
!
!!! ! ! !!
!
!
!! ! !
!
!
! ! ! !
!
!
!!!! !!
!!!!
! ! !!!!
!
! !!!
!
!
!
! !! !!!! !!!
!!
!
!
!
!
!
!
!
!
!!
!!
!!
! ! !! !
!!
!!
!
!
!!
!
!! !!
!
! !
!
! !!! !!
! !!!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!!
!
!
!
!
!!!
! ! ! !!!! ! !
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
! !
!!
! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!! !
!
!
!
!
! !
! !!
!! !
!
!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
!
! !
!
!
!!!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!! !!! !!!
!
!!
!
!!!
!!!
!
!
!
!
!
!
!
!
!
!
! ! !! !
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!
!!
! ! !! !
!
!
!
!
!
!
!
!
!
!
!!!!!
!
!
!!!
!
!
!
!
!
!!
!
!!!
!
!!!
!
!
!!
!
!
!!
!!
!!
!!
!
!
!
!!
! !!!!!!
!!
!
!!!
!
!
!
!
!
!
! !! !!!
!
!!
!!
!! !! !
!
!
!!
!!
!!! !
!! !
!
!
!
!
!
! ! !
!
!
!
!!
!
!
!!
!!
!
!!!!
!
!
!
!!
!
!
!
!
!
!!!!!!
!
!
!
!
!
!
!
! !! !!
!!
!! !
! !
!
!
!
!
!
!
! !
!
! !
!
!!!!
!!!!
!
!
!!
! !!! !!
!
!
!
!
!
!
!! !
!!!
!!
!
!
!
!!!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!!! ! !!
!
!!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
! !!
! ! !
!!
!
!
!
!
!
!
!
!
!
!
!!!
!! !!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!!
!!
!
!
!
!!!!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!!!!! !!!
!!
!
!
!
!!!
! !
!!
!
!
!!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
! !!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !!
! !! !!
!!!!!
! !!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!!!! !
!!! !
! !!
!
!
!! !!!!!
!! !! !
!
!
!
!
!
!
!
!
!
!
!!
!
!!!
!
!!
!
!!
!!!
! !!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!!
!
!!
!
!
!
!
!
!!!!!
!
!
!! !!! !
!!
!
!
!
!
!
!! ! ! !
!
!
!
!
!
!!! !!! !!
!
!
!
!!
!!
! !!! !!
!
!
!
!
! !! !!!! !
!
!
!
!!!
!
!!!!
!
!
!
!
!
!!
!!!
! ! !!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!! !!!!!
!!
!!
!!
!!!
!
!
!
!
!
!
!
!
!
!!
! ! !
!
!
!!
!
!
!
!!
!
!!
!
!!!! !!
!
!!!
! !
!! !
!!
!
! !! !
!
!
!
!
!
!
!
!
!
! !! !
! ! !
! !
!
!
!
!!
!
!
!
!
!
! !
!!
!
!
!
!
!!
!
!
!
!
!
!!
! !
! !!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!!
!!!!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!!
!
!
!
! !!
!
!
!
!
!!
!
!!!
!!
!! !
!
!!
!
!
!
!
!
!
!
!
! ! !!! ! !
!
!
!!
!
!! !
!
!
!
!
!!
!
!
!
!
!
!! !
!
!!
!
!
!
!
!
!
!
!!!!
!!
!
!
!
!
!
!!
!
!! !
! !!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!!
!
!!
!
!
!
!
!!!
!!
!
!
!
!
!!
!
!!!
!
!! !
!
!
!
!!!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!! !
!
!
!!!
!
!!!
!!
!!
!
!
!
!!
!!
!
!!
!!
!!
!
!
!
!
!
!!
!
!
! !!
!
!!
!!
! !!!
!
!
!!!!
!
!!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
! !!!
!
!!
!
!
!
!!!!
!
!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!!
!
!
!!
!
!
!!!
!
!
!
!
!
!!!
!
!
!!
!!!
!!
!
!
!
!!
!!!
!
!!!
!!
!
!
!! !!! !!!!!!! !!!
! ! !
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!! !!
!
!
!
!!
!!
!
!!!! ! !
! !
!
!
!
!
!!
!!
!!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!!!
! !!!
!!!!
!
!
!
!
!
!!
!
!
! ! !!! !
!!!!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!
!
!! !
!
!!
!
!
!
!
!
!
!
!
!!
!!
!
!
!!
!
! !! !!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
! !
!!!
! ! !! ! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!!
! !
!
!!
!
!
!
!!
!!
!
!
!!
!!
!!
!
!
!
!
!
!
!
!
!!
!!
!!
!
!!!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!!
!
!
!!!
!
!!
!
!!
!
!
!
!
!
!
!!!
!!
!!!!!!!
!
!!
!
!
!
! ! !
!
!!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
! !
!!
!!
!
!
!
!
!
!
!
!!!!
!
!
!
!
!
!
!
!
!!!
! !
!
!
!
!
!! !
!
!
!!!
! !
!
!!!
!
! ! !
!
!
!
!
!
!
!!
!
!
!
!
!
!
!! !!
!
!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!! !
!
!!
!
!
!!!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!! ! !
!!!! !
!
!!
!!!!
!
!!
!
!!!!
! !!
!!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!!
!!!
!!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!!!!
!
!
!
!
!!
!!!!!
!!
!!
!!
!
!
!
!
!! !
!
!
!
!
!
!
!
!
!
!
!
!
!!!!!!!
!
!
!
!!
!
!
!
!
!
!
!!
!
!
!
!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
! !
!
!!!
!
!
!!
!
!
!
!
!
!
!!! !
!
!
!!
!
!
!
!
!
!
!
!
!!!!
!
!
!
! !!! !!!!! ! !
!
!
!
!
!
!
!
!
!!! !
!
!
!!
!
! !!!
!
!
!
!
!
!
!
!!
!
!
!
!
!
! !!!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!! !
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! ! !!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!!
! !
!
!
!
!
!
!
!
!
!!
!
!! !
!
!
! !!
!!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!!! !
!
!!
! !! !
! !!!!
!! !
!
!!
!
!
!
!
!
!
!
!!
!
!
!
!
! !
!!!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !!
!!
!
!
!!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !
!!
!
! !!!
!
!
!
! !
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
! !
!
!
!
!
!
!
!
!
!
!
!
! ! !! !
!
!
!
!
! ! !!
!
!
! !
!
!!
!
!
!
!
!!!!!!!!! !
!
!
!! ! ! ! ! !
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!!!!
!
! !!!!
!
!
!
!
!
!
!
!!!!
!!!! ! !
! !
!
!
!
!
!
!!
!! ! !!
!
!
!
!!
!
!
!
!
!
!
!
!
!
! !!
!
!!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! ! ! ! ! !
!
!
!
!
!
!!!
!
!! !
!
!!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!
!
!
! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!! !!
!
!! !!!!!
!! ! !
!
!!
!!!
!
!!
!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
!
!
!!
!!
!
!!
! !!!!!!
!!!
! !!!!!
! !
!
!
!
!
!
!
!
!
!
!
!
!
!! !
!
!!!!!
!
!!! ! !!!!!!
!
!!
!
! ! !
!!
!
!
!
!
!
! ! !
! !
!
!
!
!
!
!
!
!!
! ! !
!
!
!
!
!
! !!
! !!
!
!!
! ! !!!!
!! !
! !
!
!!
!
!!
!
!
!
!! !
!!
!!!! ! !!!!! !!!
!! !!
!
!!!
!
!!
!
!
!!!!
!
! !!
!
!
!
!! !
!
!!
!
!
! !!
!!
!
!!!
!!
! !! !!
!
!
!!!
!
! !
!!! ! ! ! !!! !
!
!
!!
!
!
!
!
!!
!! !!
!! !
!!
!
!
!!
!
!
!
!
!
!!! ! !!
!!
!!
!
!!!
!
!
!!
!
!
!
!!
!
! !!
!
!
! !!
!
!
!
!
!
!
!
!!
!
!
!
!! ! !!
! ! !!!!
!
!
!
!
!
!
!
!!
!
!! !! !! ! !!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!!
!!
!
! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! ! !! !!!!
!
!
!
!
!
!
!
!
!
! !
!!
! !!
!
!!!
!
!
!
!!!
!
!
!
!!
!! !
!
!
!
!!
!
!
!
!
!
!
!!!
!
!!!
! !
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
! !
!
!
!
!!
!
!
!
!
! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !
! ! !!! !!
!!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
!
! !! ! ! ! !!
!
! !
!!
!
! !
!
!
!
!
!!!
!
!
!
!
!
!
! !!
!!
! ! ! ! ! ! !!!
! !
!
! !
!
!
!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
! !!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !
!
!!
!
!
!
!
!
!
!
!!
!
!
! !
!
!
!
! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !!
!
!
!
!
! !!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!!
!
!
!
!
!
!
!
!!
!
!
!
!
!
! !
!
! !!
!
!
!
!
!
!
!!!
!
!
!
!
!!
!! !
! !
!!
!
!!
!
!
!
!!!!
!!
!!
! !!
!
!!
!
!
!
!
!!!!!!
!
!
!!
!
!
!
!
!!
!
!
!
!
!
!!
!
!!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!!!
! !!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!
!!
!
!!
!
!
!!
!
!
!
!!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!
!
!
!
!!! !
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!!
!
!
!
!
! !
!
!
!
!
! !!!!!
! ! !!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
! !
!! !
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!!
!
!
!!!
!
!
!
!
!!
!
!
!!
!
!
!!
!!
!
! !
!
!
!
! ! ! !
!
!
!
!
!!
!
! !
!
!
!
!
!!! !!
!
!
!
!
!
!
! !!!!!
!
!
!
! !
!
!
!!
!
!
!
!!
!
!
! !
!
!
! !!
!!!!!!! !
! ! !
!
! ! !
!!!
!
!
!
!
!
! !! !
!! !!!
!
!
!!
!
! !!!! !
!!
!!
!
!
!
!
!
!
!
!
!
! ! !!!
!
!
!
!
!
!
!
!
!!
!! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!!
! !! !!!
!
!
!
!
!!!
!
!
! ! ! ! !!!!
! ! !!
!
!
!
!
!
!!!!
!
!
!
!!
!!
!
!
!
!
!
!
!
!
!! !!!!
!!
!
!
! !
!
!
!
!
!
!!!!
!
! !
!!!!
!
!
!
!
!
!
!
!
!!
!
!!
!
!
!!
!
!
!
!
!
!!
!
! !!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!!
!
!
!
!
!!!
! !!
!
!!
!
! !!!! !
!
!
!
!
!
!
!!
!
!
!
!
!
!
! !!
!
!
! !!!
!
!
!
!
! !
!
!
!
!
!! ! ! !!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!! !
!
!!
!
!!
!
!
!
!
!
!
!
!
!
!
! !! !
!
!!
!!
!
!!
!
!
!! !
!
!
!
!
!!! !
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
! !!
!
!
!
!
!
!
!
!!
!
!
!
!! ! ! ! ! !
!!
!
!
!
!
!
!!
!
!
!
!!
!!
!
!
!
!
!
!
!!
!
!
!
!
! !!!! !!!
!!
!
!
!
!
!
!
!!
!
!
!
!
!
!! !!!! !!! !
!
!
!
!
!
!
!
!!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !
!
!
!
!!
!
!!
!!
!
!!
! !!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!!!
!
!!!!
!!
!!!! !
!
!
!
!
!!!
!!
!
!!
!
!
!!
!
!
!
!
!
! !
!
!
!
!
!
!
!
!
!
!!
!
!
!!! !! !
!
!!!
!!
!
!
!!
!
!
!
!
!
! !! ! !
!!!
!
!
!
!
!
!!
!
!
!
!
!!!
!
!
!
!
!
!!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!!
!
!
!
!!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !
!!
!
!!
!!
!
!
!!! ! !!!
!!
!
!!
!!
!
!
!
!
!
!!
!
!!
!
!
!
!
!
!
!!! !!
!!
!
!
!
!
!
!
!
!
!!
!! !!!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!!
!
!!!! !
!
!!
!
!
!
!
!!
!
!
!
!
!
!
!
!
! !
!
!
!
!
!
! !
!
!
!!
!
!
!
!
!!
!!
!
!
!
!
!!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!!
!!
!
!
!!!
!
!!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!!!
!
!!
!
!
!!
!
!
!
!!
!
!
!
!
!
!
!!
!
!
!!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!!
!!
!
! !
!
!
!
! !
! !!! ! !
!
!
!!!!!
!
!!!! !
!!
!
!
!
!
!
!
!
!
!
!!
! !!!
!
!
!
!
!
!
!
!!
!
!
!
!!
!
!!
!
!
!
!!
!!
!
!
!!
!
!
!
!
!
!
!
!
!!
!
!
!!!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!!!!
!
!
!
!!!
!!
! !
!
!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!!
!
!!
!! !!!
! !!!!!
!!! !
!!!!
!
!
!
!
!
!
!
!
!
!!
!
!!
!!
!!
!!!
! !! !!
!
!
!!
!
!!
!
!
!
!
!
!!!
!
!
!
!
!!!!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!! !
!
!
!
!
!
!!
!!
!
!
!
!!
!
!!
!
!
!!
!
!!
!
!
!! !! !!
!
!
!
!
!
!
!
!
!!
! !
!
!
!
!! !!
!
!!
!!
!
!! !
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!!
!!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!!
!! !
!!!
!!
! !!!!
!
! !
!
!
!!
!
!
!
!
!
!
!!
! ! !!
!
!
!!
!
!
!!
!!!! !
!
!
!!
!!
!
!
!
!
!
!!
!
!
!! !
!!!!
!
! !! !!
! !! !
!
!
!
!!!
!
!!
!
!
!
!
!
!
!
!
!
!
!!!!!!!
!
!
!
!
!!
!
!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!!
!
!! !
!
!
!
!!
!
!
!
!!
!!
!
!
!
!
!!!
!! !!
!
!
!
!
!
!
!!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!!
!
!!
! ! !!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!!!
!
!
!
!
!
!
!
!! !!
!!
!
!
!
!
!
!!!!
!
!
!
!
! !
!!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!!
!!
!!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
!!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!!
!
!
!
!
!
!!
!
!!!
!!
!!
!!!
!!!!!
!
!!
!!
!
!!
!
!
!!
! !
!!! !!
!
!
!
!
!
!
!!!!
!
!!
!
!
!
!
!
!
!
!
!!!
!!
!!!
! !!! !!!
!
!
!
!
!!
!
!!!
!
!! !
!!
!
!
!!!
!!
!
!
!
! !
!!!
!!
!!
!
!
!
! ! !!
!!
!
!
!
!
!
!
!
!
!! !
!
!
!
!!
!
!!
!!
!!
!!
!
!
!
!
!
!
!!! !!
!! !
! !
!
!
!!!!!!
!
!
!
!
!
!
!
!! !
!!
!
!
!
!
!
!!
!
!
!!
!!
!
!
!!!
!
!!
!
!!
!
!
!!
!
!! !
!
!
!
!
!
!
!
!
!! !!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
! !
!
!
!
!
!!
! !!!!
!
!
!!
!
!
!!
!
!
!
!!
!!! ! !
!
!
!!
!
!
! !!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!!
!
!!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!!
!
!
!!
!! !!!
!
!
!! !!!!
!
!
!
! !
!
!!
!
!
!!
!
!
!
!
!
!
!
!
!
!!
!!!
!!!
!!!
!
!
!!
!!
!
!
!
!
!
!
!
!
!!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!!! !!
!
!
!
!
!
!
!
! !
!
!!
!! ! !!
!
!
!
!
!
!
!
!
!
!
!!
!! !!
! !
!
!
!! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!!!
!
!
!
!!
!
!
!
!!
!!
!!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!!
!!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !! !!
!
!
!
!! !
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!! ! !
! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
! ! !
!!
!
!!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !! !
! !!
! ! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
! !!
!! !
!
!! !!!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
! !!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!! !
!
!
!
!
!
!
!
!
!
!
!
!
! !!
!! !
! !!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!!!
!!! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!!
!!
!
!
!!!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!! !! !
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!! !
!
!
!
!
!
! !
!
!
!
!
!
!
!
!
!
!!!
!
!
!!!
!
!
!!
!
!
!
!!
!
!
!!!!
! !!!!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!!
!
!
! !
!
!
!
!
!
!
!
! !!
!!!
!
!
!
!
!
!
!!
!!!!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!! !
!
!
!
!
!
!
!
!
!
!
!
!!
!
! ! ! ! !!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !
!
!
!
!
!
!
!!!
!
!
!!
! !
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
! !!
!!
!
!
!!!
!
!
!
!
!
! !!!
!
!
!
!
!
!!!
!!!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!!!!
!
!
!
!
!! ! ! !
!
!
!
!!!!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
! !
!!!
!! ! ! !!!! !!
!
!
!
!!
!! !
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!!
!!
!!!!!
! !
!
!!! ! !!!!!
!!
!!
! !!! ! !
! !!!
!
!
!
!!!! !
!
!
!
!
!
! !!
!
!
!! !
!
!
!
!
!! ! ! !
! !!
!
!!
!
!
!
!!!! !
! ! !!! !
!
! !
!
!
!! !
!
!
!
!
!!
!!
!!!
!
!
!
!
!!
!
!!
!!
!
!
!
!
!
!!!!!!
!
! !!
!!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!!!
!
!!
!
!
!
!!
!
!
!!
!
!
! !!
!!!!
!!
!
!!!!
!
!
!
!
!!!!!! !!!!
!!
!!
!
!
!
!
!
!
!!
! ! ! !! ! ! !!
!
!!
!
!
!
!!
!!!
!
!
!
!
!
! !!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
!!
!
!! !
!
! !
!!
!
!
!
! ! !!!
!!
!
!
!
! !
!!
!
!!!
! !!
!
!!! ! ! !!
!
!
!
!
!
!!
!
!!
!
!
!
!!
!
!
!
!
!!! !! ! !
!
!
!
!
!
! ! !
!!
!!
!!!!
!!! ! !
! !! ! !! !!!
!
!!
!
!
!
!!!!!
!!!
!
! !!
! ! !
!
!
!
!!
!
!
!
!
! !!!!
!
!
!
!
!
!
!
! ! !
!!
!!!
!!
!
!
!
!
!
!
!!
!
!!
! !
!
!
!
!
!
!
!
!
!! !!!!
!
!
!
!
!
!
!
!!
!!!!!
!
!
!
!
!
!! ! !
! ! !
! !!
!!!!
!
!
!
!
!
!
!
!!!
!
!
!!
!
!
!
!!
!
!!
! !!!!
!! !!!
!!
!!
!
!!
!!
! !
!
!
!!
!
!
! !
!
! !! !
!
!
!
!
!
!
!
! !!
!
! ! !!
!!
!!!
!
!
! !! !!!
!
!!
!!!
!!
! ! ! !!
!! !
!
!!
!!!!!!
!
!
!
!!
! !!
!
!
!
!!
! !!! !! !
!
!!
!
!
! ! !!!
!
!!!
!
!
!
!!
!
!
!!
!
!!
!!
!!
!!
! !!!!
! !!
!
!
!
!
!!
!!
!!!
!
!!!
! !
!
!!
! !
! !
!! !!
!!
!!
!
!!! !
!!!!! !!
! !
!
!
!!
! !
!
! !!
!!!!!!!!!!!
!
!
!
!!
!
!
!
!!
!
!
!
!
!!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!!
!
!
!
!
! !
!
!
!
!
!
!
!
!
!!
!
!
! !!
!
!
!
!
!
!
!
!
!
!!
!
!!
!!
!
!! !
!
!
!
!
!!
!
!
!
!
!!
!!
!!
!
!
!
!
!
!!
!
!!!
!
!
!!
!!
!
!
!
!
!
!!
!!
!! !!
!
!!
!
!
!
! !!!!!!!
!
!
!
!
!
!
!!
!
! !
!
! !
! !!
!
!
!!
!!
! !!!
!!
!
!
!!
!
!
!
!
!
!
! !!!!
!!!
!
!
!
!
!
!!
!
!
!!
!
!
!
!!!
!
!
!!!!
!
!
!
!!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
!
! ! !!
!
!
!!
!
!
!
! !
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!!
!
!
!!
!
!!
!!
!
!
!
!
!
!
!
!
!
!!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
! ! !!
!
!
!
!
!
!
!
!!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!! ! !!
!
!
!!
!!
!
!
!!!!!
!
!
!
!!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
! !
!
!!
!
!
!!
!
!
!!
!
!!!
!
!
!
!
!!!
!
!
!
!
!
!
!!
!!
!!
!
!
!
!
!
!!
!
!
!
!!
!!
!!
! !
!
!
!!
!
!
!
!
!
!!
!
!
!!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!!
!
!
!!
!
!
! !!!
!!
! !!!
!
! !!!
!
! !
!
!! !
!
!
!
!!!
!!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!!
!
!
!
!
!
! !!
!
!!
!
! ! !!
!!
!
!
!
!
!
!
!
!
!
!
!
! !
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!!
!!
!
!
!
!!
!
!
! !
!
! !!
!
Figure 6.16: The estimated dislocations due to lack of access to power or water after three days from the
occurrence of the earthquake
6.6
Conclusions
Natural hazards can significantly impact societies. This chapter focused on the question of how we can
comprehensively model the societal impact of hazards by translating the reduction or loss functionality of
physical systems (like structures and infrastructure) to the impact on individuals’ well-being. To answer this
question, the chapter first described how we could model the reduction or loss of functionality of physical
systems. Then, the chapter presented the Capability Approach to convert the functionality of physical
systems into predictions of the genuine opportunities that individuals have to achieve valuable doings and
beings such as meeting the physiological needs, being mobile, and having shelter. The result is a holistic
formulation that can guide the design of physical systems and the development of mitigation and recovery
strategies that promote well-being and social justice. Finally, the chapter illustrated some of these concepts
through a comprehensive example. A detailed regional risk analysis was conducted, considering the direct
physical damage of a scenario earthquake to structures and infrastructure, the cascading effects of the loss of
functionality, and the ultimate impact on the capability of being sheltered. The example further considered
the post-disaster recovery modeling of physical systems and the implication on social justice. The obtained
results indicate that accurate regional risk analysis requires capturing the spatial variability of the hazard
intensity measures and the conditions of physical systems. The proper model resolution is critical to capturing
161
the differences in the extent of the initial impact and the recovery pace of different population groups. The
results also showed that the hazard might exacerbate social differences and inequalities. Therefore, fairness
in distributions of the impact and recovery should be accounted for in risk evaluation.
162
Chapter 7
Uncertainty Propagation in Risk and
Resilience Analysis of Hierarchical
Systems
7.1
Introduction
Uncertainty quantification is an integral part of decisions concerned with mitigating the risk of hazardous
events and enhancing community resilience. Such decisions will affect the well-being of communities for
decades ahead (Ingram et al. 2006). The goal of uncertainty quantification in decision-making is to rigorously
characterize the sources of uncertainty in the physical models and efficiently propagate these uncertainties
through the computational models for statistical inference about decision objectives (Doostan and Owhadi
2011). In regional resilience analysis, the collection of structures, infrastructure, and communities constitutes
a complex dynamical system whose performance is affected by many uncertain system characteristics and
external stressors (Gardoni 2019; Koliou et al. 2020). The mathematical models representing the dynamics
of such interconnected systems are hardly perfect, and the input data and model parameters are uncertain.
The uncertainty prompts scientists and engineers to conduct an end-to-end analysis of the encountered errors
to ascertain confidence in decision objectives. Furthermore, to improve the predictions’ accuracy and guide
future data collection, we must quantify the importance of uncertain input data and model parameters
to decision objectives using sensitivity analysis (Saltelli 2002; Der Kiureghian and Ditlevsen 2009). The
growing computational capabilities have enabled increasingly detailed simulations of complex systems, and
uncertainty propagation serves as a guide to improve such simulations. To improve the applicability of
infrastructure and community resilience modeling, one needs to characterize the sources of uncertainty,
propagate the uncertainty through the computational models of the system’s components, and quantify the
impact on the resilience objectives.
There are two grand challenges in uncertainty quantification in regional resilience analysis, the high dimensionality of uncertain inputs and multiple fidelity of computational models. The computational models of
regional resilience analysis entail many uncertain inputs O 104 which make the uncertainty quantification
a daunting task. The underlying sub-models also have different fidelity, and thus the distribution of computational resources across several computational models becomes extremely important because one would
163
prefer to decrease the number of expensive high-fidelity simulations (Perry et al. 2019). There is no available
literature dealing with uncertainty quantification in regional risk and resilience analysis (Peherstorfer et al.
2018; Iooss and Lemaître 2015). The available uncertainty quantification techniques in high-dimensional
problems and multi-fidelity regimes (e.g. Lataniotis et al. 2018; Kurowicka and Cooke 2006; Peherstorfer
et al. 2016) provide guidance but are not directly applicable to the problem of regional resilience analysis.
This chapter proposes a rigorous mathematical formulation to propagate uncertainty in risk and resilience
analysis of hierarchical systems with ultra high-dimensional uncertain inputs . The novelties of the proposed
formulation are 1) a hierarchical approach for multi-stage uncertainty propagation to reduce the dimensionality of uncertainty propagation, 2) a variable grouping approach to reduce the number of simulations required
per variable group, and 3) integration of dimensionality reduction and back-propagation techniques with the
hierarchy of models to obtain actionable information from uncertainty quantification. First, the interface
functions are introduced to decouple the regional resilience analysis into constituent models, reducing the
problem dimension. Then, at the individual model level, a variable grouping approach is used to reduce the
number of simulations. The variable grouping often occurs naturally by exploiting the problem’s structure.
The grouping scheme also enables evaluating the effects of a meaningful group of random variables (e.g., the
demand of a service area on a given infrastructure) to the resilience objectives, instead of considering individual random variables (e.g, the demand of individual consumers). The sensitivity analysis is then performed
for variable groups that are the most valuable in providing actionable information. The computationally
expensive models are also identified, and experimental design is developed for these models to reduce the
total computation. The proposed formulation uses Saltelli sequences (Saltelli et al. 2008) to design experiments and the Sobol’s indices (Sobol 1993) for global sensitivity analysis. The chapter then illustrates the
proposed formulation using the example of resilience analysis for the potable water infrastructure of the city
of Seaside in Oregon.
7.2
Sensitivity in resilience analysis
Global sensitivity analysis is based on partitioning uncertain input variables’ contributions towards the
variance of a model’s response (Iooss and Lemaître 2015). This section presents the theory of variance-based
global sensitivity analysis and the simulation approaches to efficiently calculate the sensitivity measures.
7.2.1
Global sensitivity analysis
Let x ∈ Rd be the vector of all input random variables to the computational model for predicting a typical
resilience objective R : Rd → R (e.g., R ≡ ρ ). Also, let xu = xi1 , . . . , xi|u| indicate a sub-vector of input
164
random variables indexed by u = i1 , . . . , i|u| ⊆ {1, . . . , d}. We assume that the input random variables
Qd
are statistically independent (i.e., F (x) = i=1 Fi (xi ) , where Fi (·) is the marginal probability distribution
2
of xi ), and R ∈ L2F Rd is a second-order random function (i.e., kRkF = Rd |R (x) |2 dF (x) < ∞.)
The global sensitivity analysis builds on a decomposition of R into a set of component functions as
R (x) =
X
Ru (xu ) ,
(7.1)
u⊆{1,...,d}
where the component functions Ru , for u ⊆ {1, . . . , d}, are recursively defined as follows:
R (x) dFū (xū ) −
Ru (xu ) =
X
Rv (xv ) ,
(7.2)
v⊂u
R|ū|
in which ū is the complement of u (i.e., u ∪ ū = {1, . . . , d}).
The component function Ru (xu ) is obtained from the orthogonal projection of R (x) into R ∈ L2F R|u| .
Mathematically, we derive the first term in Eq. 7.2 from the orthogonal projection
R∗u (xu ) = arg
min
S∈L2F (R|u| )
2
|R (x) − S (xu )| dF (x) .
(7.3)
Rd
For any α ∈ R and S∈L2F R|u| , we have R∗u (xu ) + αS (xu ) ∈ L2F R|u| . We then define
2
|R (x) − R∗u (xu ) − αS (xu )| dF (x) .
h (α) =
(7.4)
Rd
It follows that h (α) should have a minimum at α = 0 insofar as R∗u (xu ) is the solution of the optimization
problem in Eq. 7.3. i.e., h0 (0) = Rd S (xu ) [R (x) − R∗u (xu )] dF (x) = 0 for all S∈L2F R|u| . The optimality
condition then requires
R|u|
[R (x) − R∗u (xu )] dFū (xū ) = 0 that yields
R∗u
(xu ) = E [R (x) |xu ] =
R (x) dFū (xū ) .
(7.5)
R|ū|
Starting from u = ∅, the orthogonal projection yields the first component function R∅ = R∗∅ =
Rd
R (x) F (x) (see Eqs. 7.1-7.2). The recursive construction of the component functions then follows
using
R (x) dFu (xu ) = 0,
(7.6)
R|ū|
for all u ⊆ {1, . . . , d} and u 6= ∅. The proof of this property follows from induction and using R∅ =
165
Rd
R (x) F (x). The recursive construction of the component functions using orthogonal projections also
yields
Ru (xu ) Rv (xv ) dF (x) =
Rd
Var [Ru (xu )],
u=v
u 6= v
0,
,
for all u, v ⊆ {1, . . . , d}, where Var [Ru (xu )] is the variance of Ru (xu ).
(7.7)
In writing Var [Ru (xu )] =
2
Rd
|Ru (xu )| dF (x), we have used the property in Eq. 7.6.
The decomposition in Eq. 7.1 along with the properties of the component functions in Eqs. 7.6 and 7.7
yield the variance of R (x) as
Var [R (x)] =
X
Var [Ru (xu )] .
(7.8)
u⊆{1,...,d}
Likewise, we can define the variance associated with any subset of indices u ⊆ {1, . . . , M } as
Var {E [R (x) | xu ]} =
X
Var [Rv (xv )] .
(7.9)
v⊆u
The variance decomposition in Eqs. 7.8 and 7.9 allows us to quantify the contribution of each xu to the
uncertainty in the estimates of the resilience objective R. Specifically, we define three sensitivity indices for
xu in terms of its scaled variances. i.e.,
γu =
γuC =
Var [Ru (xu )]
,
Var [R (x)]
P
v⊆u Var [Rv (xv )]
P
γuT =
Var [R (x)]
v⊇u Var [Rv (xv )]
Var [R (x)]
,
(7.10)
,
where γu is the main sensitivity index that captures the contribution of xu in isolation, for which
P
C
u⊆{1,...,d} γu = 1 holds by design; γu is the closed sensitivity index that captures the contribution of
xu with all its constituents; and γuT is the total sensitivity index that captures the contribution of xu in
combination with all other random variables. It is easy to see that the relation γuT = 1 − γūC holds between
the total sensitivity index of xu and the closed sensitivity index of its complement xū .
It is important to note that for the case of input variables not being independent (i.e., F (x) 6=
Qd
i=1
Fi (xi )), the model representation in Eq. 7.1 contains terms of increasing input dimensionality, which
makes the variance decomposition in Eq. 7.8 non-unique (Li and Rabitz (2012); Chastaing et al. (2012)).
Although the definitions of the sensitivity measures in Eq. 7.10 are still valid, the measures would represent
166
both the model structure and the statistical dependencies among the input variables (Oakley and O’Hagan
(2004)).
7.2.2
Computation of sensitivity indices
Stochastic simulations are the most general approach to estimate the discussed sensitivity indices for
problems with complex computational models and probability measures. Such stochastic simulations rely on
unbiased and consistent estimators of the quantities of interest. From Sobol (1993), we have the following
estimators to compute the discussed sensitivity indices:
M
1 X (m) ,
R∅ =
R x
M m=1
Var [R (x)] =
Var {E [R (x) | xu ]} =
M
1 X 2 h (m) i
R x
− R2∅ ,
M m=1
(7.11)
M
1 X h (m) (m) i h (m) 0(m) i
R xu , xū
R xu , xū
− R2∅ ,
M m=1
where the last estimator follows from
Var {E [R (x) | xu ]} = Var
R (x) dFū (xū ) ,
R|ū|
2
2
R (x) dFū (xū )
− E
R (x) dFū (xū )
,
=E
|ū|
|ū|
R
(7.12)
R
R (xu , xū ) R (xu , xū0 ) dFū (xū ) dFū (xū ) dFu (xu ) − R2∅ .
=
R|ū| R|ū| R|ū|
The estimators presented in Eq. 7.11 are straightforward, and important for understanding, but Saltelli
et al. (2010) provided more efficient estimators for computing γu , γuC , and γuT combined with algorithms to
M
M
generate quasi-random numbers to generate independent sets of samples x(m) m=1 and x0(m) m=1 .
7.3
Uncertainty Propagation in Hierarchical Systems
Regional risk and resilience analysis include coupled models at various levels of hierarchy. The hierarchical
structure increases the problem’s overall dimensionality because many variables are involved in each of these
models. Furthermore, the models are typically a representation of infrastructure and communities over space
and time. Hence, the dimensionality increases with increasing scale and resolutions of the infrastructure and
167
community characterization. However, in this chapter, we exploit the same hierarchical structure of the
regional risk and resilience analysis problem to reduce the dimensional space of random variables. To do so,
we decompose the global sensitivity analysis into multiple stages while reducing each stage’s computation.
This section presents the chapter’s original contributions in tackling the computational challenges and making
the global sensitivity analysis feasible for regional risk and resilience analysis.
7.3.1
Decomposing the sensitivity analysis into multiple stages
We continue with the definition of R (x) from Section 7.2.1. Without loss of generality, let us assume
that R (x) has a hierarchical structure such that an input variable xi is estimated using an underlying
model M (y) (i.e., xi = M (y)). Here y ∈ Rdy is the vector of input random variables to the underlying
computational model for predicting the intermediate input xi through M (y) : Rdy → R. We further assume
Qdy
dy
that random variables {yj }j=1
are statistically independent (i.e., F (y) = j=1
Fj (yj ) ). The computational
model R (x) then becomes
R (x) = R [M (y) , xī ] .
(7.13)
In a naive implementation of global sensitivity analysis, the input variables’ total dimension increases
from d to d + dy − 1. To estimate the quantities in Eq. 7.11, using Saltelli et al. (2010), we need two sets of
n
o
n
o
(m)
0(m)
independent samples,
y(m) , xī
: m = 1, . . . , M and
y0(m) , xī
: m = 1, . . . , M . However, due
to the increase in the input variable dimension from d to d + dy − 1, the number of samples M needs to
increase accordingly. Furthermore, in the case of regional risk and resilience analysis, the underlying models’
dimensionality may be much higher, i.e., dy d. To tackle the increasing input dimension in the hierarchical
models, we propose decomposing the global sensitivity analysis in multiple stages and using back-propagation
to obtain the overall result.
For an underlying model M (y), if we now consider a sub-vector of variables yw = yj1 , . . . , yj|w| , then
for M (y), we can again write
M (y) =
X
Mw (yw ) ,
(7.14)
w⊆{1,...,dy }
where the component functions Mw , for w ⊆ {1, . . . , dy }, can be defined identical to Eq. 7.2. We define
C
T
the intermediate sensitivity measures for each yw as γw [M], γw
[M] and γw
[M] by replacing R (x) with
M (y) in Eq. 7.10. Using Eqs. 7.8 and 7.14, we then have the global sensitivity indices for each yw by
back-propagating from the global sensitivity of xi as
168
γw [R] = γw [M] γi [R]
C
C
γw
[R] ≤ γw
[M] γi [R]
(7.15)
T
T
γw
[R] ≤ γw
[M] γi [R]
7.3.2
Grouping input variables at individual stages of sensitivity analysis
Calculating the global sensitivity measures for any component function Ru (xu ) requires 2M evaluations
of the computational model R (x). However, by design, we can select the set of component functions
{Ru (xu )} for which the sensitivity analysis is performed. Rather than estimating the first-order indices for
all input variables (i.e., performing 2dM evaluations), we choose a set u (i.e., performing 2 |u| M evaluations),
with |u| d. We propose four criteria to group the input variables, 1) Decision variable based grouping, 2)
Model-based grouping, 3) Functional attributes based grouping, and 4) Statistical correlation based grouping.
Suppose the goal of an uncertainty propagation is to evaluate the impact of particular actions such as
mitigation efforts. In that case, the variables modified in each of the actions can be grouped. The underlying
model-based grouping works in tandem with the multi-stage sensitivity explained in the previous subsection.
In the case an underlying model provided multidimensional intermediate inputs to the computation model,
these intermediate inputs can be grouped. Grouping variables from the same underlying models reduces
computation and supports the backpropagation to the inputs at the lower level. Variables related to the
same functional category of infrastructure components can also be grouped; for example, in the case of water
infrastructure, all the pumping stations can be grouped to study the impact of pumps in general on water
infrastructure resilience.Finally, regarding the statistical correlation based grouping, Section 7.2.1 presented
a qualification of the variance-based global sensitivity analysis. In the case of input variables not being
Qd
independent (i.e., F (x) 6= i=1 Fi (xi )), the variance decomposition in Eq. 7.8 is non-unique. So, grouping
the variables to maximize the intra-group correlation and minimize the inter-group correlation results in
computational savings and improves the interpretability of the groups’ sensitivity indices.
7.4
Minimum working example for comparative analysis
We use a minimum working example to conceptually illustrate the proposed formulation and perform a
comparison with the traditional variance based global sensitivity analysis. We use a benchmark function
from the literature, know as the Ishigami function (Ishigami and Homma 1990; Sobol and Levitan 1999;
Marrel et al. 2009). We can write the computational model as
169
R (x) = sin (x1 ) + a sin2 (x2 ) + bx43 sin (x1 ) ,
(7.16)
where x = {x1 , x2 , x3 } are the input variables, while a and b are parameters. Input variables x1 , x2 , x3
are statistically independent and follow uniform distributions, {xi ∼ U (−π, π) ; i = 1, 2, 3}. Following Marrel
et al. (2009), we use the parameter values a = 7 and b = 0.1.
7.4.1
Analytical sensitivity indices for the Ishigami function
The sensitivity indices for the Ishigami function can be solved analytically. The main sensitivity indices
for the three input variables are
Var [R1 (x1 )]
,
Var [R (x)]
Var [R2 (x2 )]
γx2 [R] =
,
Var [R (x)]
Var [R3 (x3 )]
,
γx3 [R] =
Var [R (x)]
γx1 [R] =
(7.17)
where
a2
bπ 4
b2 π 4
1
+
+
+ ,
8
5
18
2
4 2
bπ
1
1+
,
Var [R1 (x1 )] =
2
5
a2
Var [R2 (x2 )] = ,
8
Var [R (x)] =
(7.18)
Var [R3 (x3 )] =0.
The total sensitivity indices for the three input variables are
P
γxT1
[R] =
v⊇{1}
Var [Rv (xv )]
Var [R (x)]
v⊇{2} Var [Rv (xv )]
,
P
γxT2 [R] =
γxT3 [R] =
Var [R (x)]
P
v⊇{3} Var [Rv (xv )]
Var [R (x)]
where
170
,
,
(7.19)
X
1
2
Var [Rv (xv )] =
a2
,
8
Var [Rv (xv )] =
8b2 π 8
,
225
v⊇{1}
X
v⊇{2}
X
Var [Rv (xv )] =
v⊇{3}
1+
bπ 4
5
2
+
8b2 π 8
,
225
(7.20)
The analytical solutions serves as a convenient way to compare the accuracy and efficiency of computational approaches.
7.4.2
Hierarchical modification to the Ishigami function
The proposed formulation provided a way to improve the efficiency of uncertainty propagation for hierarchical computational models with different computational complexity. We introduce a hierarchical structure
in the Ishigami function that allows us to illustrate the advantages of the proposed formulation while enabling
the comparison with the analytical solution.
We assume that the computational model R (x) has a hierarchical structure such that the input variable
x2 is estimated using an underlying model M (y) (i.e., x2 = M (y)). Where y ∈ R10 is the vector of input
random variables to the underlying computational model for predicting the intermediate input x2 through
M (y) : R10 → R, written as
" P5
x2 = M (y) = 2 arctan
j=1
P10
j=6
Φ−1 (yj )
Φ−1 (yj )
#
.
(7.21)
10
We further assume that random variables {yj }j=1 are statistically independent (i.e., F (y) =
Q10
j=1
Fj (yj )
) and follow standard uniform distributions, {yj ∼ U (0, 1) ; i = 1, 2, . . . , 10}. It can be derived that with the
10
definition of M (y) in Eq. 7.21, and the distribution assumptions on {yj }j=1 , M (y) ∼ U (−π, π). Hence,
the analytical solution for the sensitivity of x1 , x2 , x3 according to Eqs. 7.17-7.20 remain valid.
7.4.3
Sensitivity analysis
We illustrate the advantages of the proposed formulation by comparing the results of sensitivity analysis from two cases. In Case1, we perform the sensitivity analysis using a naive approach for estimating the sensitivity indices.
Following Section 7.3.2, we need 2dM evaluations to calculate the sensi-
tivity indices of a computation model with d dimensional inputs.
In this example the computational
model R (x), including the underlying model for x2 leads to 12 independent input random variables,
{x1 , y1 , y2 , y3 , y4 , y5 , y6 , y7 , y8 , y9 , y10 , x3 }. Hence the total number of evaluations, NR,1 = 24MR,1 .
171
In Case2 we follow the proposed formulation in Section 7.3.1, and decompose the sensitivity analysis into
two stages. In the first stage we perform the sensitivity analysis of M (y), alone. We need NM,2 = 20MM,2
o
n
evaluations of M (y) to evaluate the sensitivity indices γyj [M] , γyTj [M] ; j = 1, 2, . . . , 10 , where MM,2 is
chosen to satisfy the convergence criterion. The coefficient of variation of the quantity of interest is a typical
convergence criterion. However, the values of γyj [M] can be zero is some cases whereas, γyTj [M] typically
stays non-zero. Hence, we use the infinity norm of the coefficients of variation of the total sensitivity
n
o10
< 0.05, to check for convergence. We found that for
COV γyTj
indices being less than 0.05,
j=1 ∞
MM,2 = 4000, i.e, NM,2 = 80, 000 evaluations satisfy the converge criterion, with the following results for
the sensitivity indices
γyj [M] = 0; j = 1, 2, . . . , 10,
γyTj [M] = 0.2762; j = 1, 2, . . . , 5,
(7.22)
γyTj [M] = 0.6301; j = 5, 6, . . . , 10.
Furthermore the 80, 000 samples for x2 = M (y) are sufficient to accurately estimate the parameters for
the probability distribution x2 ∼ U (−π, π). In the second stage we perform the sensitivity analysis of R (x)
by sampling from the empirically obtained distribution of x2 . In the second stage we need NR,2 = 6MR,2
evaluations of R (x).
We compare the results obtained from Case1 and Case2 in terms of accuracy and convergence. We
compare the accuracy and convergence corresponding to an equivalent computational cost Ne . We measure
the computational cost Ne as the total number of equivalent evaluations of the computational models. For
the Case1 we write Ne = NR,1 + θN NR,1 , whereas for the Case2 we write Ne = NR,2 + θN NM,2 . The
proposed formulation would thus provides a significant computational advantage when the computational
complexity of M (y) is smaller than the computational complexity of R (x), i.e. θN 1. To simulate a
scenario typically observed in the regional resilience analysis models, we use for this example that θN = 10−4 .
3
3
We estimate the sensitivity indices {γxi [R]}i=1 , γxTi [R] i=1 , and their confidence intervals using different
values of NR,1 for Case1 and NR,2 for Case2. Since x2 is not an explicit input variable in Case1, we calculate
in this case γx2 [R] = γyC [R], and γxT2 [R] = γyT [R]. We compare the convergence by comparing the coefficient
3
of variation of the total sensitivity indices {COV (γxi [R])}x=1 .
Figure 7.1 provides the results of the comparison. Figure 7.1(a) and (b) show the results for
3
3
{γxi [R]}i=1 , γxTi [R] i=1 for different values of Ne . We observe that for a given Ne the proposed formulation
(Case2) consistently provides more accurate and precise estimates compared to the naive implementation
(Case1). Furthermore, the estimates of the indices stay generally unbiased in Case2 whereas due to rela-
172
tively high dimensions in Case1, the sensitivity estimates tend to be biased for lower values of Ne . The
confidence bands indicate the 95% confidence intervals for the estimated quantities. We can see that the
proposed formulation in Case2 inadvertently provides narrower confidence bands. Figure 7.1(c) shows the
trends of the convergence criteria with increase in the computational cost. We observe that for typically
used ranges of convergence criterion, i.e. 0.01 − 0.05, the proposed formulation provides up-to an order of
magnitude advantage in terms of the reduction computational cost. Specifically, for θN = 10−4 , and a
convergence cutoff of 0.05, we reduce the computational cost by an average 5.12 times. However even if we
assume θN = 10−1 , the proposed formulation still results in a reduction in the computational cost by 2.76
times. It is also worth noting that in this example we only reduced the dimensions from 12 to 3 for the most
expensive model, however, in the real world cases, for example, in regional resilience analysis the reduction
in dimensions can be of multiple order of magnitudes. Higher reduction in the dimensions would result in
correspondingly higher advantage in terms of computational cost.
173
0.3
Case1
Case2
True
0.2
103
104
105
Ne
0.4
Case1
Case2
True
0.3
106
103
104
105
Ne
Case1
Case2
True
0.15
0.5
γx3 (R)
γx1 (R)
confidence band
γx2 =M(y) (R)
confidence band
0.4
0.1
confidence band
5 · 10−2
0
103
106
104
105
Ne
106
(a) Main sensitivity indices
Case1
Case2
True
0.4
103
104
105
Ne
confidence band
0.4
Case1
Case2
True
0.3
106
103
104
105
Ne
confidence band
0.3
γxT3 (R)
0.6
γx2 =M(y) (R)
γxT1 (R)
0.5
confidence band
0.8
0.25
Case1
Case2
True
0.2
106
103
104
105
Ne
106
(b) Total sensitivity indices
0.15
0.1
Case1
Case2
0.15
0.1
5 · 10−2
5 · 10−2
0
103
0.2
104
105
Ne
106
0
103
0.2
COV γxT3 (R)
Case1
Case2
COV γxT2 =M(y) (R)
COV γxT1 (R)
0.2
Case1
Case2
0.15
0.1
5 · 10−2
104
105
Ne
106
0
103
104
105
Ne
106
(c) Coefficients of variation
Figure 7.1: Comparison of accuracy and convergence
7.5
Propagating uncertainty in resilience analysis of water
infrastructure for Seaside
We illustrate the proposed formulation using the example of resilience analysis for the potable water
infrastructure of the city of Seaside in Oregon, United States. The city of Seaside is a small coastal community
in Northwestern Oregon and is subject to seismic hazards originating from the Cascadia Subduction Zone.
As a disrupting event, following Guidotti et al. (2019), we model a scenario earthquake with magnitude 7.0
and epicenter at 35.93◦ N and 89.92◦ W (i.e., 25 km South-West of Seaside off the Oregon coast). We use
174
the ground motion prediction equations (Boore and Atkinson 2008) to model the spatial variation of the
earthquake intensity measures (Peak Ground Acceleration and Peak Ground Velocity).
The characterization and the performance assessment of the water infrastructure are similar to the one
considered in Section 5.5; however, with a lower spatial resolution. Figure 7.2 provides the details of the
model used for the potable water infrastructure of Seaside. This section only presents information relevant
to uncertainty propagation. Details and definitions of the quantities used are available in Chapter 5.
Reservoir
Tank
Pump
Demand nodes
!
( Commercial
!
( Industrial
!
( Residential
Recovery zone
C1
C2
C3
I1
M1
R1
R2
R3
R4
R5
Figure 7.2: Potable water infrastructure of Seaside, Oregon
7.5.1
Model for time-varying performance of water infrastructure
As explained in Section 5.3, the mathematical model of potable water infrastructure consists of a structural network G[1] and a hydraulic flow network G[2] . The deterioration processes and recovery activities
directly impact G[1] and indirectly impact G[2] through its dependency on G[1] . The functionality of the
infrastructure is in terms of the performance of G[2] .
We estimate the the seismic damage to the pumps, tanks, and pipelines in G[1] . For the pumps and
tanks we use the seismic fragilities available in HAZUS (FEMA (2014)) together with the Peak Ground
175
Acceleration (P GA). For the pipelines we use the repair rate curves from ALA(ALA (2001)) together with
the Peak Ground Velocity (P GV ). Furthermore, we model the location and number of leaks/breaks in a
pipeline using a Poisson process (ALA 2001); for a pipeline of length le , we write the probability mass
function for the number of leaks/breaks, N (le ), as Eq. 5.19. Here we denote the damage state of the tank,
[1]
[1]
and pumps, and pipes as the performance of the structural network components (i.e., Qtank ,Qpump , and
[1]
Qpipe ).
As discussed in Section 5.3.2, the functionality of the potable water infrastructure is terms of Q[2] (τ ) =
[2]
S (τ ) D[2] (τ )
1{D[2] (τ )0} , where , , and are the element-wise division, multiplication, and
comparison operators. Q[2] (t) is obtained from the hydraulic flow analysis of G[2] . We account for the
[2] interdependency by modifying C[2] (τ ) using the interface function M C Q[1] (τ ) . We estimate S[2] (τ ), by
solving the governing hydraulic flow equations (see Eq. 5.30) using the Python package WNTR (Klise et al.
2017). This solution approach for S[2] (τ ) uses a pressure-dependent flow analysis that discounts supplied
water quantity based on the pressure; when the calculated pressure at a delivery node drops below a limiting
value, the estimate of S[2] (τ ) at that delivery node becomes zero (Wagner et al. 1988).
Furthermore, following the discussion in Section 5.4, to quantify the resilience of the potable water
infrastructure at a given tr , we require the recovery surface Q (τ, y ∈ Ω), where Ω corresponds to Seaside,
OR. For the uncertainty propagation case We partition Ω into 46 non-overlapping tributary areas, i.e.,
Snα =46
Ω = α=1
Ωα . The map Q[2] (τ ) 7→ Qα (τ ) is such that every location, y ∈ Ω, is served by the nearest
delivery node. We also define an aggregated performance measure for the whole infrastructure as
Q (τ, Ω) =
nX
α =46
Wα Qα (τ )
(7.23)
α=1
P α
where Wα = Dα (τ )/ nα=1
Dα (τ ) is the assigned weights to Qα (τ ) for the tributary area Ωα . The definition
of Wα ensures that Q (τ, Ω) ∈ [0, 1]. Figure 7.3 presents the average water demand (in gallons per minute)
in Seaside during normal operations.
176
Demand [GPM]
Commercial
1 - 25
26 - 50
51 - 200
Industrial
1 - 25
26 - 50
51 - 200
Residential
1 - 25
26 - 50
51 - 200
105
396
227
203 207
219
268
226
19 380
101
366
369
28 91
66 199
153
272 355
102
21
193
154
136
104
221
208
414
255
220 20
152
72
119
353
103
254
155
393
354
88
399
77
Figure 7.3: Average water demand for Seaside, Oregon
7.5.2
Model for the water demand estimation
The average water demand for a given tributary area in Figure 7.3 is calculated using the number of
customers of a particular type (residential, industrial, or commercial) and multiplying the number with
commonly accepted per-capita demand values. For example, for a residential tributary area the demand
Dα (τ ) = ΘD,res pα , where ΘD,res is the per-capita residential water demand and pα is the population residing
in the tributary area Ωα (there also exist ΘD,comm and ΘD,ind for commercial and industrial consumers).
Both parameter ΘD,res and population pα has uncertainty associated with them. In the case of Seaside,
we have the population at the census block level. Figure 7.4 presents the population for Seaside, Oregon.
However, we need the population within a tributary area, pα . To estimate pα we allocate the population
in a block to the buildings within that block, using a stochastic population allocation algorithm provided
by Boakye et al. (2020). There are 4628 residential buildings in Seaside. Each building’s population is then
aggregated to the tributary area level to get the water demand at each demand node in the potable water
infrastructure model. Additionally, the population in Seaside in the aftermath of an earthquake will not
remain stable. The demand estimation needs to account for the households’ dislocation due to the damage
to the buildings. To estimate the population in the immediate aftermath of the earthquake, we use the
predictive model for the households’ dislocation developed by Lin (2009). Figure 7.5 presents the estimated
177
probability of household dislocation in the earthquake’s immediate aftermath due to the building’s direct
physical damage.
Population
0 - 20
21 - 50
51 - 100
101 - 200
201 - 500
Buildings
!
Figure 7.4: Population allocation for buildings in Seaside, Oregon
178
26% - 50%
51% - 75%
! 76% - 85%
!
!
!
1
!
2
!
3
!
4
!
5
!
6
!
7
Figure 7.5: Probability of household dislocation due to the direct physical damage to the building
7.5.3
Model for the recovery process
Next, we model the evolution of the state variables of the water infrastructure under the recovery process.
For each pipe, we update the estimates of the state variables after completing the scheduled recovery activities. We use the multiscale approach with ten different recovery zones (see Figure 7.2). We prioritize these
recovery zones in the following order: 1) mainlines, 2) zones with damaged components in residential and
commercial areas in decreasing order of total demand, and 3) zones with damaged components in industrial
areas in decreasing order of total demand. To develop the recovery schedules, we estimate the duration of
individual recovery activities using the productivity values derived from RS Means (Means 2016). We then
adjust these productivity values using
ηq0 = ω (qκ /qκ,min )
1−εκ
ηq ,
(7.24)
where ηq and ηq0 are the base and corrected productivities of a crew of type κ and size qκ ; qκ,min is
the minimum required size of the crew; ω is a correction term to include the effects of factors like skilled
labor, working hours per day, and weather condition (Sharma et al. 2018a); κ is a small positive constant
to discount the productivity of a congested crew (i.e., when qκ > qκ,min ). We treat ω as a random variable
179
to consider construction productivity as one of the input random variables in the recovery model. The
working hours per day is assumed to be fixed at 16 hours (PlaNYC 2014). Given the small number and high
criticality of the damaged pumping stations, booster pumps, and tanks, we assign separate crews to recover
these components, where the respective recovery durations in this example are obtained from HAZUS-MH
Technical Manual (FEMA 2014). The recovery duration of the pumps and tanks (τR,pump ,τR,tank ) are again
considered random variables for propagating uncertainty.
7.5.4
Sensitivity analysis for regional resilience of potable water infrastructure
In this example, we select the Temporal Center of Resilience ρQ for the whole Seaside as the region of
interest, Ω as the sole resilience objective
TR
τ dQ (τ, Ω)
R = ρQ = 0 TR
,
dQ (τ, Ω)
0
(7.25)
Table 7.1 provides a summary of the input random variables. To reduce the dimensionality of the problem,
we use both the strategies introduced in Section 7.3.
Table 7.1: The summary of input random variables
Input variable type
Number of variables
Population allocation
4628
Population dislocation
4628
Per-capita demand coefficients
3
Tank damage
1
Pump damage
7
Pipe damage
178
Pipe recovery productivity
1
Tank recovery duration
1
Pump recovery duration
7
Total
9454
We first decompose the sensitivity analysis into two stages. On the lower state, i.e., Stage 1, we have
the individual models to estimate the total population in each tributary area (labeled in Figure 7.3). The
input dimensionality for each lower-level model is twice the number of buildings in the tributary area. At
the higher level, i.e., Stage 2, we use every tributary area’s total populations as input random variables.
180
Furthermore, we group the remaining variables in Stage 2. We group the pipe damage variables into
10 groups based on the pipes’ recovery zones (designed considering collocation and functional factors). We
consider the pump damage variables for 7 pumps together in one group. We also group the 7 recovery
duration variables for the pumps in one group.
Table 7.2: The summary of input random variables after dimension reduction
Sub model
Input variable type
Number of variables
Number of groups
Consumers in tributary area
46
46
Per-capita coefficients
3
3
Tank damage
1
1
Pump damage
7
1
Pipe damage
178
10
Pipe recovery productivity
1
1
Tank recovery duration
1
1
Pump recovery duration
7
1
Total
244
64
Demand
Damage
Recovery
Hence, the total number of high-fidelity runs required to perform the potable water infrastructure’s global
sensitivity analysis is 128M . We chose M = 1500 to satisfy the convergence criteria in terms of the COV for
R for each evaluation of the sensitivity index. We then calculated the γuT using the formulation explained in
Section 7.2. Figure 7.6 presents the sensitivity indices for each of the input variable groups (only indices with
value > 0.01 are included in the plot). We observe that the sensitivity index is highest for damage variables
in general. Specifically, the tank’s damage state’s uncertainty contributes the most to the uncertainty in
the resilience objective. The next set of variables with high sensitivity are the recovery variables. Here,
the duration for the recovery of the pumps is the most crucial in the group. The sensitivity indices for the
per-capita coefficients of the demand estimation are higher than that of the number of consumers in the
tributary area. The group sensitivity indices provide more interpretable information than the individual
variables’ sensitivity indices. Furthermore, in Fig 7.6, we already know that the demand model’s sensitivity
indices are the lowest. The sensitivity indices of consumer numbers in the tributary areas provide us with
an upper bound on the sensitivity indices of the lower level models of population allocation and dislocation.
181
0.75
0.64
0.56
0.5
0.35
0.25
0.10
p19
p20
p21
p226
p28
p66
p72
p88
p91
0.02 0.02 0.03 0.02 0.03 0.01 0.02 0.02 0.02
ΘD,comm
ΘD,ind
0.06 0.04
τR,pump
τR,tank
ω
[1]
QR2
[1]
QR4
[1]
QR5
[1]
QC1
[1]
QC2
[1]
QC3
[1]
QM1
[1]
Qpump
[1]
Qtank
0.06 0.04 0.04
0.04 0.02
0.03 0.04
0.01 0.03
ΘD,res
Total Sobol’ index, γuT
1
Figure 7.6: Total Sobol’s indices for the selected variable groups
We also perform the sensitivity analysis of the population allocation and population dislocation group
of variables for each tributary area. Using Eq. 7.15 and the results in Fig 7.6, we estimated the sensitivity
indices for allocation as γpTalloc = 0.01, and for population dislocation γpTdisloc = 0.02. We can draw two types
of actionable insight from the results depending on the models’ uncertainty. If the uncertainty is aleatory,
then the strengthening of particular components may provide high returns in terms of the resilience objective.
If the models’ uncertainty is epistemic, we can collect more data and develop more precise models to reduce
uncertainty.
7.6
Conclusions
For the first time, this chapter developed a rigorous mathematical formulation to propagate uncertainty
in risk and resilience analysis of hierarchical systems with ultra high-dimensional uncertain inputs. The
core idea was to exploit the problem’s hierarchical structure to reduce the dimensionality of uncertainty
propagation. Additionally, a strategy to group the variables was proposed that reduces the number of
simulations required while promoting more interpretable and actionable results. The chapter then illustrated
the proposed formulation using two examples. A minimum working example provided an illustration of the
concepts and a comparative analysis to show the advantages of the proposed formulation. A real world
example of the resilience analysis for Seaside, Oregon’s potable water infrastructure then illustrated the
scalability of the proposed formulation in propagating uncertainty in ultra high dimensional hierarchical
problems. The example also provided actionable insight for the specific case of the resilience analysis of the
water infrastructure. Population allocation, population dislocation, structural damage, water demand, and
recovery productivity were the different types of uncertain input variables. The structural damage models
182
contributed most to the uncertainty, followed by recovery productivity and consumer behavior for water
demand. These results can be used to identify possible improvements to the models that contribute more to
uncertainty. The result also identify models that do not contribute significantly to the uncertainty and can
thus be replaced with deterministic or simplistic counterparts to reduce computational costs.
183
Chapter 8
Conclusions
This final chapter will summarize the important insights from this dissertation. The main focus was on
developing realistic models to study the infrastructure’s behavior under disruptive events and recommend
strategies that can improve the infrastructure’s ability to recover rapidly. The main contribution areas
broadly include 1) Classification of interdependencies and mathematical modeling of interdependent infrastructure, 2) Recovery modeling, and resilience quantification and optimization, 3) Modeling the societal
impact of hazards on communities, and 4) Uncertainty quantification in regional resilience analysis. The
following subsections further explain the challenges relating to each of the listed areas and present a brief
review of prior work to provide context for the new contributions.
A novel classification for infrastructure interdependencies is developed that is consistent with their mathematical modeling. The proposed classification partitions the space of interdependencies based on their
ontological and epistemological dimensions, thereby better enabling us to understand and mathematically
model several classes of infrastructure interdependencies. Under the dimension of ontology, infrastructure interdependencies are classified into chronic and episodic. Under the dimension of epistemology, infrastructure
interdependencies are classified consistently parallel to the mathematical models required to describe them
in mimicking the reality. The dissertation then also developed a novel mathematical formulation to model
interdependent infrastructure. A glossary for infrastructure terminology was provided, which expanded some
current definitions and introduced new definitions for physical quantities required to model critical infrastructure. The general mathematical formulation for modeling infrastructure was then described. The proposed
formulation can represent regional infrastructure by explicitly modeling their various capacities, demands,
supply, and derived performance measures. An approach to model interdependencies using interface functions was then presented. The mathematical forms of the interface functions were discussed, and their ability
to model bilateral and looped interdependencies was explained. A conceptual example then illustrated the
implementation of the proposed formulation and provided some experimental insights. The scalability of
the proposed mathematical formulation was illustarted through an example of a large-scale problem for the
post-disaster recovery modeling of power infrastructure with recovery dependencies on the transportation
184
infrastructure in north west of Oregon. The example modeled the power infrastructure covering parts of four
US states for an accurate power flow analysis. The obtained results indicated that the post-disaster recovery
of the power infrastructure is significantly affected by the dependencies on the transportation infrastructure.
The disseration then developed a rigorous mathematical formulation to optimize the resilience of largescale infrastructure. The novelties of the proposed formulation are 1) a multi-scale model of the recovery
process; 2) resilience metrics to capture the temporal and spatial variations of the recovery process; and
3) a computationally efficient optimization problem to improve regional resilience. To manage the recovery
of infrastructure spread over large geographic areas, the proposed multi-scale model partitions damaged
infrastructure into several recovery zones, prioritizes the recovery zones, and develops detailed schedules
for intra-zonal recovery activities. This model favors practical and easily manageable recovery schedules.
The proposed resilience metrics then quantify the resilience associated with the developed recovery surface.
The multi-objective optimization integrates multi-scale recovery modeling, high-fidelity flow analyses, and
resilience metrics to recommend recovery schedules that improve regional resilience, while minimizing the
recovery cost. The temporal and spatial resilience metrics associated with the developed recovery surface
can be used to promote rapid recovery that also reduces the spatial disparity of the recovery progression.
Furthermore, the separate treatment of monetary cost and resilience metrics in the optimization problem
eliminates the issues of monetizing the consequences of disrupted services. The proposed formulation was
illustrated for the resilience optimization of large-scale interdependent infrastructure. It was observed that
the optimized recovery schedule reduced the power outage duration for pumping stations and hospitals,
though these were the first priorities in the current recovery practice; indicating that the sequence of physical
recovery does not imply the same sequence of functionality recovery. This observation underscores the
significance of using high-fidelity flow analyses for functionality recovery. It was also observed that the electric
power infrastructure recovered rapidly compared to the potable water infrastructure. This observation
explains the differences in the recovery time scales of different infrastructure; thus, the availability of different
infrastructure resources may dominate the values of regional resilience at the corresponding time scales.
Furthermore, the optimized recovery schedule specifically improved the resilience of high demand areas and
reduced the spatial disparity of recovery progression across the region of interest.
The dissertation then integrated the formulation to model regional resilience into a life cycle analysis. A unified formulation is proposed for deterioration and recovery of engineering systems aimed at the
quantification of the resilience of the infrastructure over time. The framework included a state-dependent,
physics-based formulation for the evolution of the state variables due to both the deterioration phenomena
occurring before the occurrence of the shock event, and the recovery actions that are selected following the
shock event. Emphasis was posed on the application of the proposed framework to water infrastructure,
185
with a detailed formulation of physics-based repair rate curves for pipelines and recovery action planning for
water networks. The expected damage on pipelines was obtained as a function of a set of physical parameters
including soil properties, geometrical dimensions, and material properties. The distinction of the damage on
the pipeline segments and the pipeline joints allowed for a more accurate estimate of the time needed for
recovery. The proposed formulation was applied to an example of the coastal community of Seaside, OR. The
results highlighted the importance of considering the age of the pipelines in estimating the resilience of the
water infrastructure, as well as the influence of the spatial variability of soil conditions on the performance
of the infrastructure.
The dissertation then focused on the question of how we can comprehensively model the societal impact
of hazards by translating the reduction or loss functionality of infrastructure to the impact on individuals’
well-being. A Capability Approach was used to convert the functionality of infrastructure into predictions
of the genuine opportunities that individuals have to achieve valuable doings and beings such as meeting the
physiological needs, being mobile, and having shelter. The result is a holistic formulation that can guide the
design of infrastructure and the development of mitigation and recovery strategies that promote well-being
and social justice. Some of these concepts were illustrated through a comprehensive example. A detailed
regional risk analysis was conducted, considering the direct physical damage of a scenario earthquake to
structures and infrastructure, the cascading effects of the loss of functionality, and the ultimate impact
on the capability of being sheltered. The example further considered the post-disaster recovery modeling of
physical systems and the implication on social justice. The results showed that the hazards might exacerbate
social differences and inequalities. Therefore, fairness in distributions of the impact and recovery should be
accounted for in risk evaluation.
A useful regional resilience analysis requires both a fine understanding and modeling of the underlying
processes, as well as a significant recognition of intrinsic uncertainties and their influences on the resilience
objectives. The dissertation made a novel contribution to strategies for propagating uncertainty through
hierarchical systems with high dimensional inputs. Multistage uncertainty propagation and variable grouping were proposed as ways to reduce computational costs. An example of a water infrastructure resilience
was considered, where uncertain inputs include underlying models of population allocation, population dislocation, structural damage, water demand, and recovery productivity. The structural damage models were
found to be contributing most to the uncertainty followed by recovery productivity and consumer behavior
for water demand.
186
References
Adachi, T. and Ellingwood, B. R. (2008). Serviceability of earthquake-damaged water systems: Effects of
electrical power availability and power backup systems on system vulnerability. Reliability Engineering &
System Safety, 93(1):78–88.
Adeli, H. and Hung, S.-L. (1994). Machine learning: neural networks, genetic algorithms, and fuzzy systems.
John Wiley & Sons, NY.
Adger, W. N. (2006). Vulnerability. Global environmental change, 16(3):268–281.
ALA (2001). Seismic Fragility Formulations for Water Systems: Guidelines. Technical report, American
Lifeline Alliance.
Albert, R., Albert, I., and Nakarado, G. L. (2004). Structural vulnerability of the north american power
grid. Physical review E, 69(2):025103.
Alexander, D. (2002). From civil defence to civil protection–and back again. Disaster Prevention and
Management: An International Journal.
Alkire, S. and Foster, J. (2011). Counting and multidimensional poverty measurement. Journal of Public
Economics, 95(7):476–487.
Anderson, M. and Woodrow, P. J. (1989). Rising from the ashes: Development strategies in times of disaster,
1989.
Ang, A.-S., Pires, J., and Villaverde, R. (1996). A model for the seismic reliability assessment of electric
power transmission systems. Reliability Engineering & System Safety, 51(1):7–22.
Apostolopoulou, D., Sauer, P. W., and Domínguez-García, A. D. (2015). Balancing authority area model and
its application to the design of adaptive agc systems. IEEE Transactions on Power Systems, 31(5):3756–
3764.
ATC-13 (1985). Earthquake damage evaluation data for california. Technical report, Applied Technology
Council, Redwood City, CA.
Ayyub, B. M. (2014). Systems esilience for multihazard environments: Definition, metrics, and valuation for
decision making. Risk Analysis, 34(2):340–355.
Ballet, J., Bazin, D., Dubois, J.-L., Mahieu, F.-R., et al. (2011). A note on sustainability economics and the
capability approach. Ecological Economics, 70(11):1831.
Ballet, J., Koffi, J.-M., and Pelenc, J. (2013). Environment, justice and the capability approach. Ecological
Economics, 85:28–34.
Banerjee, S. and Shinozuka, M. (2008). Mechanistic quantification of rc bridge damage states under earthquake through fragility analysis. Probabilistic Engineering Mechanics, 23(1):12–22.
Bastidas-Arteaga, E., Bressolette, P., Chateauneuf, A., and Sánchez-Silva, M. (2009). Probabilistic lifetime
assessment of rc structures under coupled corrosion–fatigue deterioration processes. Structural safety,
31(1):84–96.
187
Bedford, T. and Cooke, R. (2001). Probabilistic risk analysis: foundations and methods. Cambridge University Press.
Bensi, M., Der Kiureghian, A., and Straub, D. (2014). Framework for post-earthquake risk assessment and
decision making for infrastructure systems. ASCE-ASME Journal of Risk and Uncertainty in Engineering
Systems, Part A: Civil Engineering, 1(1):04014003.
Bialek, J. W. (2007). Why has it happened again? comparison between the ucte blackout in 2006 and the
blackouts of 2003. In 2007 IEEE Lausanne Power Tech, pages 51–56. IEEE.
Birchfield, A. B., Gegner, K. M., Xu, T., Shetye, K. S., and Overbye, T. J. (2017). Statistical considerations
in the creation of realistic synthetic power grids for geomagnetic disturbance studies. IEEE Transactions
on Power Systems, 32(2):1502–1510.
Boakye, J., Gardoni, P., and Murphy, C. (2019). Using opportunities in big data analytics to more accurately predict societal consequences of natural disasters. Civil Engineering and Environmental Systems,
36(1):100–114.
Boakye, J., Guidotti, R., Gardoni, P., and Murphy, C. (2020). The role of transportation infrastructure on
the impact of natural hazards on communities. (in preparation).
Boardman, A. E., Greenberg, D. H., Vining, A. R., and Weimer, D. L. (2017). Cost-benefit analysis: concepts
and practice. Cambridge University Press.
Bocchini, P., Decò, A., and Frangopol, D. (2012). Probabilistic functionality recovery model for resilience
analysis. In Frangopol, D., editor, Bridge Maintenance, Safety, Management, Resilience and Sustainability,
pages 1920–1927. Taylor & Francis.
Bocchini, P. and Frangopol, D. M. (2011). A stochastic computational framework for the joint transportation
network fragility analysis and traffic flow distribution under extreme events. Probabilistic Engineering
Mechanics, 26(2):182–193.
Boore, D. M. and Atkinson, G. M. (2008). Ground-motion prediction equations for the average horizontal
component of PGA, PGV, and 5%-damped PSA at spectral periods between 0.01 s and 10.0 s. Earthquake
Spectra, 24(1):99–138.
BPA (2018). 2018 transmission plan. Bonneville Power Administration, http://www.bpa.gov/.
Bressan, A., Čanić, S., Garavello, M., Herty, M., and Piccoli, B. (2014). Flows on networks: recent results
and perspectives. EMS Surveys in Mathematical Sciences, 1(1):47–111.
Brouwer, J., Gasser, I., and Herty, M. (2011). Gas pipeline models revisited: model hierarchies, nonisothermal
models, and simulations of networks. Multiscale Modeling & Simulation, 9(2):601–623.
Brown, R. P. and Butler, T. (2000). Natural Ageing of Rubber: Changes in Physical Properties Over 40
Years. iSmithers Rapra Publishing.
Brown, T., Hörsch, J., and Schlachtberger, D. (2017). PyPSA: Python for power system analysis. Journal
of Open Research Software, 6(1).
Bruneau, M., Chang, S. E., Eguchi, R. T., Lee, G. C., O’Rourke, T. D., Reinhorn, A. M., Shinozuka, M.,
Tierney, K., Wallace, W. A., and Von Winterfeldt, D. (2003). A framework to quantitatively assess and
enhance the seismic resilience of communities. Earthquake Spectra, 19(4):733–752.
Cavalieri, F., Franchin, P., Gehl, P., and Khazai, B. (2012). Quantitative assessment of social losses based
on physical damage and interaction with infrastructural systems. Earthquake Engineering & Structural
Dynamics, 41(11):1569–1589.
Cavdaroglu, B., Hammel, E., Mitchell, J. E., Sharkey, T. C., and Wallace, W. A. (2013). Integrating restoration and scheduling decisions for disrupted interdependent infrastructure systems. Annals of Operations
Research, 203(1):279–294.
188
Chang, S. E., Pasion, C., Tatebe, K., and Ahmad, R. (2006). Linking lifeline infrastructure performance and
community disaster resilience: models and multi-stakeholder processes. Technical report, Multidisciplinary
Center for Earthquake Engineering Research (MCEER), Buffalo, NY.
Chang, S. E., Seligson, H. A., and Eguchi, R. T. (1996). Estimation of the economic impact of multiple
lifeline disruption: Memphis light, gas and water division case study. Technical Report NCEER-96-0011,
Multidisciplinary Center for Earthquake Engineering Research (MCEER), Buffalo, NY.
Chang, S. E. and Shinozuka, M. (2004). Measuring improvements in the disaster resilience of communities.
Earthquake Spectra, 20(3):739–755.
Chastaing, G., Gamboa, F., Prieur, C., et al. (2012). Generalized hoeffding-sobol decomposition for dependent variables-application to sensitivity analysis. Electronic Journal of Statistics, 6:2420–2448.
Chernozhukov, V. and Hansen, C. (2005). An iv model of quantile treatment effects. Econometrica,
73(1):245–261.
Cho, S., Fan, Y. Y., and Moore, II, J. E. (2003). Modeling transportation network flows as a simultaneous function of travel demand, earthquake damage, and network level service. In Advancing Mitigation
Technologies and Disaster Response for Lifeline Systems, pages 868–877.
Choe, D., Gardoni, P., and Rosowsky, D. (2007). Closed-form fragility estimates, parameter sensitivity, and
Bayesian updating for RC columns. Journal of Engineering Mechanics, 133(7):833–843.
Choe, D.-E., Gardoni, P., Rosowsky, D., and Haukaas, T. (2009). Seismic fragility estimates for reinforced
concrete bridges subject to corrosion. Structural Safety, 31(4):275–283.
Cimellaro, G. P., Reinhorn, A. M., and Bruneau, M. (2010). Framework for analytical quantification of
disaster resilience. Engineering Structures, 32(11):3639–3649.
Collier, S. and Lakoff, A. (2008). The vulnerability of vital systems: How ’critical infrastructure’ became a
security problem. The politics of securing the homeland: Critical infrastructure, risk and securitisation,
pages 40–62.
Contento, A., Pande, A., and Gardoni, P. (2020). Promoting resilient interdependent infrastructure: the
role of strategic recovery scheduling. (in preparation).
Corotis, R. B. (2009). Societal issues in adopting life-cycle concepts within the political system. Structures
& Infrastructure Engineering, 5(1):59–65.
Council of European Union (2016). Council regulation (EU) no 2016/1148: Network and information systems
(NIS) directive. http://data.europa.eu/eli/dir/2016/1148/oj.
Crucitti, P., Latora, V., Marchiori, M., and Rapisarda, A. (2003). Efficiency of scale-free networks: error
and attack tolerance. Physica A: Statistical Mechanics and its Applications, 320:622–642.
Cutter, S. L., Boruff, B. J., and Shirley, W. L. (2003). Social vulnerability to environmental hazards. Social
Science Quarterly, 84(2):242–261.
Cutter, S. L., Burton, C. G., and Emrich, C. T. (2010). Disaster resilience indicators for benchmarking
baseline conditions. Journal of Homeland Security and Emergency Management, 7(1):1–22.
Davis, C. A. (2014). Water System Service Categories, Post-Earthquake Interaction, and Restoration Strategies. Earthquake Spectra, 30(4):1487–1509.
Decò, A., Bocchini, P., and Frangopol, D. M. (2013). A probabilistic approach for the prediction of seismic
resilience of bridges. Earthquake Engineering & Structural Dynamics, 42(10):1469–1487.
Der Kiureghian, A. and Ditlevsen, O. (2009). Aleatory or epistemic? Does it matter? Structural Safety,
31(2):105–112.
189
Ditlevsen, O. and Madsen, H. O. (1996). Structural reliability methods. Wiley, New York, NY.
Doksum, K. (1974). Empirical probability plots and statistical inference for nonlinear models in the twosample case. The annals of statistics, pages 267–277.
Dong, X., Shinozuka, M., and Chang, S. (2004). Utility power network systems. In Proc. of 13th World
Conference on Earthquake Engineering.
Dong, Y. and Frangopol, D. M. (2017). Probabilistic life-cycle cost-benefit analysis of portfolios of buildings
under flood hazard. Engineering Structures, 142:290–299.
Doorn, N., Gardoni, P., and Murphy, C. (2019). A multidisciplinary definition and evaluation of resilience:
The role of social justice in defining resilience. Sustainable and Resilient Infrastructure, 4(3):112–123.
Doostan, A. and Owhadi, H. (2011). A non-adapted sparse approximation of pdes with stochastic inputs.
Journal of Computational Physics, 230(8):3015–3034.
Dorf, R. C. and Bishop, R. H. (2011). Modern control systems. Pearson.
Dudenhoeffer, D. D., Permann, M. R., and Manic, M. (2006). Cims: A framework for infrastructure interdependency modeling and analysis. In Proceedings of the 38th conference on Winter simulation, pages
478–485. Winter Simulation Conference.
Dueñas-Osorio, L., Craig, J. I., and Goodno, B. J. (2007). Seismic response of critical interdependent
networks. Earthquake Engineering & Structural Dynamics, 36(2):285–306.
EIA (2019). Energy Information Administration Open Data.
El-Rayes, K. and Moselhi, O. (2001). Optimizing resource utilization for repetitive construction projects.
Journal of Construction Engineering and Management, 127(1):18–27.
Elhmadi, K. and O’Rourke, M. J. (1990). Seismic damage to segmented buried pipelines. Earthquake
engineering & structural dynamics, 19(4):529–539.
Ellingwood, B. R. (2001). Earthquake risk assessment of building structures. Reliability Engineering &
System Safety, 74(3):251–262.
Ellingwood, B. R. (2005). Risk-informed condition assessment of civil infrastructure: state of practice and
research issues. Structure and infrastructure engineering, 1(1):7–18.
Ellingwood, B. R., Cutler, H., Gardoni, P., Peacock, W. G., van de Lindt, J. W., and Wang, N. (2016).
The centerville virtual community: A fully integrated decision model of interacting physical and social
infrastructure systems. Sustainable and Resilient Infrastructure, 1(3-4):95–107.
Faber, M. H. and Maes, M. A. (2008). Issues in societal optimal engineering decision making. Structure and
Infrastructure Engineering, 4(5):335–351.
FEMA (2004). Nehrp recommended provisions for seismic regulations for new buildings and other structures
(fema 450). Technical report, Building Seismic Safety Council National Institute of Building Sciences,
Federal Emergency Management Agency, Washington, DC.
FEMA (2014). Multi-hazard loss estimation methodology: Earthquake model HAZUS-MH 2.1 technical
manual. Technical report, Federal Emergency Management Agency, Washington, DC.
FEMA (2019). Hazard mitigation plan status. Technical report, Federal Emergency Management Agency
https://www.fema.gov/hazard-mitigation-plan-status.
Fragiadakis, M. and Christodoulou, S. E. (2014). Seismic reliability assessment of urban water networks.
Earthquake engineering & structural dynamics, 43(3):357–374.
190
Frangopol, D. M., Kallen, M.-J., and Noortwijk, J. M. v. (2004). Probabilistic models for life-cycle performance of deteriorating structures: review and future directions. Progress in structural engineering and
Materials, 6(4):197–212.
Fu, Y., Yuan, T., and Zhu, X. (2019). Importance-measure based methods for component reassignment
problem of degrading components. Reliability Engineering & System Safety, 190:106501.
García-Nieves, J. D., Ponz-Tienda, J. L., Salcedo-Bernal, A., and Pellicer, E. (2018). The multimode resource-constrained project scheduling problem for repetitive activities in construction projects.
Computer-Aided Civil and Infrastructure Engineering, 33(8):655–671.
Gardoni, P. (2017a). Promoting societal well-being by designing sustainable and resilient infrastructure. In
Christian Bucher, Bruce R. Ellingwood, D. M. F., editor, Proceedings of 12th International Conference on
Structural Safety & Reliability, ICOSSAR2017, Safety, Reliability, Risk, Resilience and Sustainability of
Structures and Infrastructure,, pages 28 – 37. TU-Verlag, Vienna.
Gardoni, P. (2017b). Risk and Reliability Analysis: Theory and Applications. Springer International Publishing.
Gardoni, P. (2019). Routledge handbook of sustainable and resilient infrastructure. Routledge.
Gardoni, P., Der Kiureghian, A., and Mosalam, K. (2002). Probabilistic capacity models and fragility
estimates for reinforced concrete columns based on experimental observations. Journal of Engineering
Mechanics, 128(10):1024–1038.
Gardoni, P. and LaFave, J. M. (2016). Multi-hazard Approaches to Civil Infrastructure Engineering: Mitigating Risks and Promoting Resilence. Springer International Publishing, Switzerland.
Gardoni, P., Mosalam, K., and Der Kiureghian, A. (2003). Probabilistic seismic demand models and fragility
estimates for RC bridges. Journal of Earthquake Engineering, 7(1):79–106.
Gardoni, P. and Murphy, C. (2008). Recovery from natural and man-made disasters as capabilities restoration
and enhancement. International Journal of Sustainable Development and Planning, 3(4):317–333.
Gardoni, P. and Murphy, C. (2009). Capabilities-based approach to measuring the societal impacts of natural
and man-made hazards in risk analysis. Natural Hazards Review, 10(2):29–37.
Gardoni, P. and Murphy, C. (2010). Gauging the societal impacts of natural disasters using a capability
approach. Disasters, 34(3):619–636.
Gardoni, P. and Murphy, C. (2013). A capability approach for seismic risk analysis and management. In
Tesfamariam, S. and Goda, K., editors, Handbook of Seismic Risk Analysis and Management of Civil
Infrastructure Systems, pages 255–267. Elsevier.
Gardoni, P. and Murphy, C. (2014). A scale of risk. Risk Analysis, 34(7):1208–1227.
Gardoni, P. and Murphy, C. (2018). Society-based design: promoting societal well-being by designing
sustainable and resilient infrastructure. Sustainable and Resilient Infrastructure.
Gardoni, P., Murphy, C., and Rowell, A. (2016). Risk Analysis of Natural Hazards: Interdisciplinary Challenges and Integrated Solutions. Springer International Publishing.
Glover, J. D., Sarma, M. S., and Overbye, T. (2012). Power system analysis & design, SI version. Cengage
Learning.
González, A. D., Dueñas-Osorio, L., Sánchez-Silva, M., and Medaglia, A. L. (2016). The interdependent
network design problem for optimal infrastructure system restoration. Computer-Aided Civil and Infrastructure Engineering, 31(5):334–350.
191
Guidotti, R., Cavalieri, F., Gardoni, P., and Franchin, P. (2020a). Bayesian updating of hazard and vulnerability models for regional risk analysis using spatio-temporally distributed heterogeneous data. ASCE
Journal of Structural Engineering, (under review).
Guidotti, R., Chmielewski, H., Unnikrishnan, V., Gardoni, P., McAllister, T., and van de Lindt, J. (2016).
Modeling the resilience of critical infrastructure: The role of network dependencies. Sustainable and
Resilient Infrastructure, 1(3-4):153–168.
Guidotti, R., Gardoni, P., and Chen, Y. (2017a). Multi-layer heterogeneous network model for interdependent
infrastructure systems. In In Proceedings of the 12th International Conference on Structural Safety and
Reliability (ICOSSAR 2017).
Guidotti, R., Gardoni, P., and Chen, Y. (2017b). Network reliability analysis with link and nodal weights
and auxiliary nodes. Structural Safety, 65:12–26.
Guidotti, R., Gardoni, P., and Rosenheim, N. (2019). Integration of physical infrastructure and social systems
in communities’ reliability and resilience analysis. Reliability Engineering & System Safety, 185:476–492.
Guidotti, R., Stupazzini, M., Smerzini, C., Paolucci, R., and Ramieri, P. (2011). Numerical study on the
role of basin geometry and kinematic seismic source in 3D ground motion simulation of the 22 February
2011 MW 6.2 Christchurch earthquake. Seismological Research Letters, 82(6):767–782.
Guidotti, R., Tian, S., and Gardoni, P. (2020b). Simulation of seismic wave propagation in the metro
memphis statistical area (MMSA). Bulletin of the Seismological Society of America, (in preparation).
Guikema, S. and Gardoni, P. (2009). Reliability estimation for networks of reinforced concrete bridges.
Journal of Infrastructure Systems, 15(2):61–69.
Hastie, T., Tibshirani, R., and Friedman, J. (2009). The elements of statistical learning. Springer-Verlag,
New York, NY.
He, X. and Cha, E. J. (2018). Modeling the damage and recovery of interdependent critical infrastructure
systems from natural hazards. Reliability Engineering & System Safety, 177:162–175.
Housner, G., Bergman, L. A., Caughey, T. K., Chassiakos, A. G., Claus, R. O., Masri, S. F., Skelton, R. E.,
Soong, T., Spencer, B., and Yao, J. T. (1997). Structural control: past, present, and future. Journal of
engineering mechanics, 123(9):897–971.
Hwang, H. H., Lin, H., and Shinozuka, M. (1998). Seismic performance assessment of water delivery systems.
Journal of Infrastructure Systems, 4(3):118–125.
Iannacone, L. and Gardoni, P. (2018). Physics-based repair rates for pipelines subject to seismic excitations.
In 16th European Conference on Earthquake Engineering. EAEE/ETAM.
Iannacone, L. and Gardoni, P. (2019). Stochastic differential equations for the deterioration processes of
engineering systems. In In Proceedings of the 13th International Conference on Applications of Statistics
and Probability in Civil Engineering(ICASP13).
Ibbs, W. and Sun, X. (2017). Weather’s effect on construction labor productivity. Journal of Legal Affairs
and Dispute Resolution in Engineering and Construction, 9(2):4517002.
Ingram, J. C., Franco, G., Rumbaitis-del Rio, C., and Khazai, B. (2006). Post-disaster recovery dilemmas:
challenges in balancing short-term and long-term needs for vulnerability reduction. Environmental science
& policy, 9(7-8):607–613.
Iooss, B. and Lemaître, P. (2015). A review on global sensitivity analysis methods. In Uncertainty management in simulation-optimization of complex systems, pages 101–122. Springer.
Ishigami, T. and Homma, T. (1990). An importance quantification technique in uncertainty analysis for
computer models. In [1990] Proceedings. First International Symposium on Uncertainty Modeling and
Analysis, pages 398–403. IEEE.
192
Jia, G. and Gardoni, P. (2018). State-dependent stochastic models: A general stochastic framework for modeling deteriorating engineering systems considering multiple deterioration processes and their interactions.
Structural Safety, 72:99–110.
Jia, G., Tabandeh, A., and Gardoni, P. (2017). Life-cycle analysis of engineering systems: Modeling deterioration, instantaneous reliability, and resilience. In Gardoni, P., editor, Risk and reliability analysis:
Theory and applications, pages 465–494. Springer.
Johansen, C. and Tien, I. (2018). Probabilistic multi-scale modeling of interdependencies between critical
infrastructure systems for resilience. Sustainable and Resilient Infrastructure, 3(1):1–15.
Johansson, J. and Hassel, H. (2010). An approach for modelling interdependent infrastructures in the context
of vulnerability analysis. Reliability Engineering & System Safety, 95(12):1335–1344.
Johnson, L. A. and Olshansky, R. B. (2017). After great disasters: An in-depth analysis of how six countries
managed community recovery. Lincoln Institute of Land Policy.
Kabir, G., Balek, N. B. C., and Tesfamariam, S. (2018). Consequence-based framework for buried infrastructure systems: A bayesian belief network model. Reliability Engineering & System Safety, 180:290–301.
Kajitani, Y., Okada, N., and Tatano, H. (2005). Measuring quality of human community life by spatialtemporal age group distributions case study of recovery process in a disaster-affected region. Natural
Hazards Review, 6(1):41–47.
Kane, J. W. and Tomer, A. (2019). Shifting into an era of repair: US infrastructure spending
trends. Technical report, Brookings https://www.brookings.edu/research/shifting-into-an-era-of-repairus-infrastructure-spending-trends/.
Kang, W.-H., Song, J., and Gardoni, P. (2008). Matrix-based system reliability method and applications to
bridge networks. Reliability Engineering & System Safety, 93(11):1584–1593.
Kellegöz, T., Toklu, B., and Wilson, J. (2008). Comparing efficiencies of genetic crossover operators for one
machine total weighted tardiness problem. Applied Mathematics and Computation, 199(2):590–598.
Kleiner, Y. and Rajani, B. (2001). Comprehensive review of structural deterioration of water mains: statistical models. Urban water, 3(3):131–150.
Kleiner, Y., Rajani, B., and Sadiq, R. (2006a). Failure risk management of buried infrastructure using
fuzzy-based techniques. Journal of Water Supply: Research and Technology AQUA, 55(2):81–94.
Kleiner, Y., Sadiq, R., and Rajani, B. (2004). Modeling failure risk in buried pipes using fuzzy markov
deterioration process. In Pipeline Engineering and Construction: What’s on the Horizon?, pages 1–12.
Kleiner, Y., Sadiq, R., and Rajani, B. (2006b). Modelling the deterioration of buried infrastructure as a
fuzzy markov process. Journal of Water Supply: Research and Technology Aqua, 55(2):67–80.
Klise, K. A., Hart, D., Moriarty, D., Bynum, M. L., Murray, R., Burkhardt, J., and Haxton, T. (2017). Water
network tool for resilience (WNTR) user manual. Technical Report SAND2017–8883R, Sandia National
Laboratories (SNL-NM), Albuquerque, NM.
Köksalan, M. M., Wallenius, J., and Zionts, S. (2011). Multiple criteria decision making: from early history
to the 21st century. World Scientific.
Koliou, M., van de Lindt, J. W., McAllister, T. P., Ellingwood, B. R., Dillard, M., and Cutler, H. (2020). State
of the research in community resilience: Progress and challenges. Sustainable and resilient infrastructure,
5(3):131–151.
Kröger, W. (2008). Critical infrastructures at risk: A need for a new conceptual approach and extended
analytical tools. Reliability Engineering & System Safety, 93(12):1781–1787.
193
Kumar, R., Cline, D. B., and Gardoni, P. (2015). A stochastic framework to model deterioration in engineering systems. Structural Safety, 53:36–43.
Kumar, R. and Gardoni, P. (2014). Effect of seismic degradation on the fragility of reinforced concrete
bridges. Engineering Structures, 79:267–275.
Kundur, P., Balu, N. J., and Lauby, M. G. (1994). Power system stability and control, volume 7. McGraw-hill
New York.
Kurowicka, D. and Cooke, R. M. (2006). Uncertainty analysis with high dimensional dependence modelling.
John Wiley & Sons.
Kurtz, N., Song, J., and Gardoni, P. (2016). Seismic reliability analysis of deteriorating representative us
west coast bridge transportation networks. Journal of Structural Engineering, 142(8):C4015010.
Lataniotis, C., Marelli, S., and Sudret, B. (2018). Extending classical surrogate modelling to ultrahigh dimensional problems through supervised dimensionality reduction: a data-driven approach. arXiv preprint
arXiv:1812.06309.
Lee, Y.-J., Song, J., Gardoni, P., and Lim, H.-W. (2011). Post-hazard flow capacity of bridge transportation
network considering structural deterioration of bridges. Structure and Infrastructure Engineering, 7(78):509–521.
Lee II, E. E., Mitchell, J. E., and Wallace, W. A. (2007). Restoration of services in interdependent infrastructure systems: A network flows approach. IEEE Transactions on Systems, Man, and Cybernetics, Part
C (Applications and Reviews), 37(6):1303–1317.
Lehmann, E. L. and D’Abrera, H. J. (1975). Nonparametrics: statistical methods based on ranks. Holden-day.
Leontief, W. (1986). Input-output economics. Oxford University Press.
Li, G. and Rabitz, H. (2012). General formulation of hdmr component functions with independent and
correlated variables. Journal of Mathematical Chemistry, 50(1):99–130.
Lin, J. (1991). Divergence measures based on the shannon entropy. IEEE Transactions on Information
Theory, 37(1):145–151.
Lin, N., Emanuel, K., Oppenheimer, M., and Vanmarcke, E. (2012). Physically based assessment of hurricane
surge threat under climate change. Nature Climate Change, 2(6):462–467.
Lin, P. and Wang, N. (2017). Stochastic post-disaster functionality recovery of community building portfolios
ii: Application. Structural Safety, 69:106–117.
Lin, Y.-S. (2009). Development of algorithms to estimate post-disaster population dislocation A research-based
approach. PhD thesis, Texas A&M University.
Mahmoodian, M. and Alani, A. (2014). Modeling deterioration in concrete pipes as a stochastic gamma
process for time-dependent reliability analysis. Journal of pipeline systems engineering and practice,
5(1):04013008.
Mair, W. (1968). Fracture criteria for cast iron under biaxial stresses. Journal of Strain Analysis, 3(4):254–
263.
Marrel, A., Iooss, B., Laurent, B., and Roustant, O. (2009). Calculations of sobol indices for the gaussian
process metamodel. Reliability Engineering & System Safety, 94(3):742–751.
Martins, N. (2011). Sustainability economics, ontology and the capability approach. Ecological Economics,
72:1–4.
May, P. J. (2007). Societal implications of performance-based earthquake engineering. Technical report,
Pacific Earthquake Engineering Research Center (PEER), Berkeley, CA.
194
Mazzieri, I., Stupazzini, M., Guidotti, R., and Smerzini, C. (2013). Speed: Spectral elements in elastodynamics with discontinuous galerkin: a non-conforming approach for 3d multi-scale problems. International
Journal for Numerical Methods in Engineering, 95(12):991–1010.
McAllister, T. (2013). Developing guidelines and standards for disaster resilience of the built-environment: A
research needs assessment. US Department of Commerce, National Institute of Standards and Technology
Gaithersburg, MD.
Means, R. (2016). Building construction costs book. Construction publishers and consultants, Kingston, MA.
Mieler, M., Stojadinovic, B., Budnitz, R., Comerio, M., and Mahin, S. (2015). A framework for linking
community-resilience goals to specific performance targets for the built-environment. Earthquake Spectra,
31(3):1267–1283.
Mihram, G. A. (1970). A cost-effectiveness study for strategic airlift. Transportation Science, 4(1):79–96.
Mises, R. v. (1913). Mechanics of solid bodies in the plastically-deformable state. Göttin Nachr Math Phys,
1:582–592.
MLGW (2015). Facts and figures for years ending december 31, 2015. Memphis Light, Gas and Water,
http://www.mlgw.com/images/content/files/pdf/FactsFigures.pdf.
MLGW (2017a).
How mlgw restores power [press release].
http://www.mlgw.com/news/how-mlgw-restores-power-5-2017.
Memphis Light, Gas and Water,
MLGW (2017b). Mlgw crews working 24/7 to restore power [press release]. Memphis Light, Gas and Water,
http://www.mlgw.com/news/mlgw-crews-working-24-7-to-restore-power-2017.
Motter, A. E. and Lai, Y.-C. (2002). Cascade-based attacks on complex networks. Physical Review E,
66(6):065102.
Murphy, C. and Gardoni, P. (2006). The role of society in engineering risk analysis: A capabilities-based
approach. Risk Analysis, 26(4):1073–1083.
Murphy, C. and Gardoni, P. (2007). Determining public policy and resource allocation priorities for mitigating natural hazards: A capabilities-based approach. Science and Engineering Ethics, 13(4):489–504.
Murphy, C. and Gardoni, P. (2008). The acceptability and the tolerability of societal risks: A capabilitiesbased approach. Science and Engineering Ethics, 14(1):77–92.
Murphy, C. and Gardoni, P. (2010). Assessing capability instead of achieved functionings in risk analysis.
Journal of Risk Research, 13(2):137–147.
Murphy, C. and Gardoni, P. (2011). Evaluating the source of the risks associated with natural events. Res
Publica, 17(2):125–140.
Murphy, C. and Gardoni, P. (2012). The capability approach in risk analysis. In Roeser, S., Hillerbrand, R.,
Sandin, P., and Peterson, M., editors, Handbook of Risk Theory, pages 979–997. Springer.
Murphy, C., Gardoni, P., and Harris Jr, C. E. (2011). Classification and moral evaluation of uncertainties
in engineering modeling. Science and Engineering Ethics, 17(3):553–570.
Murphy, C., Gardoni, P., and McKim, R. (2018). Climate Change and Its Impacts. Springer.
National Research Council (2012). Disaster resilience: A national imperative.
NAVFAC (1986). Soil mechanics design manual. Technical report, Naval Facilities Engineering Command
Publications.
Nayak, M. A. and Turnquist, M. A. (2016). Optimal recovery from disruptions in water distribution networks.
Computer-Aided Civil and Infrastructure Engineering, 31(8):566–579.
195
NERC (2004). Technical analysis of the August 14, 2003, blackout: What happened, why, and what did we
learn. Technical report, report to the NERC Board of Trustees.
Newman, M. E. (2001). Scientific collaboration networks. ii. shortest paths, weighted networks, and centrality.
Physical review E, 64(1):016132.
Newmark, N. (1967). Problems in wave propagation in soil and rocks, proceedings of the international
symposium on wave propagation and dynamic properties of earth materials. In In Proceedings of the
International Symposium on Wave Propagation and Dynamic Properties of Earth Materials. University of
New Mexico Press.
NIBS (2018). Natural hazard mitigation saves: 2018 interim report. Technical report, National Institute of
Building Sciences, Multihazard Mitigation Council, https://www.nibs.org/page/mitigationsaves.
Nocera, F. and Gardoni, P. (2019a). A ground-up approach to estimate the likelihood of business interruption.
International Journal of Disaster Risk Reduction, 41:101314.
Nocera, F. and Gardoni, P. (2019b). Modeling business interruption as a function of the reliability and
resilience of physical infrastructure and social systems. In Gardoni, P., editor, Handbook of Sustainable
and Resilient Infrastructure, pages 833–857. Routledge.
Nocera, F., Tabandeh, A., Guidotti, R., Boakye, J., and Gardoni, P. (2019). Physics-based Fragility Functions: Their Mathematical Formulation and Use in the Reliability and Resilience Analysis of Transportation Infrastructure. In Gardoni, P., editor, Handbook of Sustainable and Resilient Infrastructure, pages
237–25. Routledge.
NRCS and USDA (2008). Web Soil Survey. Technical report, United States Department of Agriculture.
Nussbaum, M. (2007). Capabilities as fundamental entitlements: Sen and social justice. In Kaufman, A.,
editor, Capabilities Equality: Basic Issues and Problems, pages 54–80. Routledge.
Nussbaum, M. C. (2000). Aristotle, politics, and human capabilities: A response to antony, arneson,
charlesworth, and mulgan. Ethics, 111(1):102–140.
Nussbaum, M. C. (2001a). Adaptive preferences and women’s options. Economics and Philosophy, 17(01):67–
88.
Nussbaum, M. C. (2001b). Women and human development: The capabilities approach. Cambridge University
Press.
Oakley, J. E. and O’Hagan, A. (2004). Probabilistic sensitivity analysis of complex models: a bayesian
approach. Journal of the Royal Statistical Society: Series B (Statistical Methodology), 66(3):751–769.
Olshansky, R. B. and Johnson, L. (2017). Clear as mud: Planning for the rebuilding of New Orleans.
Routledge.
Orabi, W., El-Rayes, K., Senouci, A. B., and Al-Derham, H. (2009). Optimizing postdisaster reconstruction
planning for damaged transportation networks. Journal of Construction Engineering and Management,
135(10):1039–1048.
O’Rourke, M. and Deyoe, E. (2004). Seismic damage to segmented buried pipe. Earthquake Spectra,
20(4):1167–1183.
O’Rourke, T. D., Jeon, S.-S., Toprak, S., Cubrinovski, M., Hughes, M., van Ballegooy, S., and Bouziou, D.
(2014). Earthquake response of underground pipeline networks in christchurch, nz. Earthquake Spectra,
30(1):183–204.
Ouyang, M. (2014). Review on modeling and simulation of interdependent critical infrastructure systems.
Reliability Engineering & System Safety, 121:43–60.
196
Ouyang, M. and Wang, Z. (2015). Resilience assessment of interdependent infrastructure systems: With a
focus on joint restoration modeling and analysis. Reliability Engineering & System Safety, 141:74–82.
Paolucci, R., Griffini, S., and Mariani, S. (2010). Simplified modelling of continous buried pipelines subject
to earthquake fault rupture. Earthquakes and Structures, 1(3):253–267.
Papic, M., Bell, K., Chen, Y., Dobson, I., Fonte, L., Haq, E., Hines, P., Kirschen, D., Luo, X., Miller, S. S.,
et al. (2011). Survey of tools for risk assessment of cascading outages. In 2011 IEEE Power and Energy
Society General Meeting, pages 1–9. IEEE.
PCCIP (1997). Critical foundations: protecting america’s infrastructures. Technical report, The President’s
Commission on Critical Infrastructure Protection.
Peacock, W. G., Dash, N., Zhang, Y., and Van Zandt, S. (2018). Post-disaster sheltering, temporary housing
and permanent housing recovery. In Rodríguez, H., Donner, W., and Trainor, J. E., editors, Handbook of
Disaster Research, pages 569–594. Springer.
Peacock, W. G. and Girard, C. (1997). Ethnic and racial inequalities in hurricane damage and insurance
settlements. In W.G., P., B.H., M., and H., G., editors, Hurricane Andrew: Ethnicity, gender and the
sociology of disasters, pages 171–190. Routledge.
Peherstorfer, B., Willcox, K., and Gunzburger, M. (2016). Optimal model management for multifidelity
monte carlo estimation. SIAM Journal on Scientific Computing, 38(5):A3163–A3194.
Peherstorfer, B., Willcox, K., and Gunzburger, M. (2018). Survey of multifidelity methods in uncertainty
propagation, inference, and optimization. Siam Review, 60(3):550–591.
Perry, D. J., Kirby, R. M., Narayan, A., and Whitaker, R. T. (2019). Allocation strategies for high fidelity
models in the multifidelity regime. SIAM/ASA Journal on Uncertainty Quantification, 7(1):203–231.
Petersen, L., Fallou, L., Reilly, P., and Serafinelli, E. (2020). Public expectations of critical infrastructure
operators in times of crisis. Sustainable and Resilient Infrastructure, 5(1-2):62–77.
PlaNYC (2014). Planyc progress report: Sustainability and resiliency 2014. Technical report, New York
City, NY, http://www.mlgw.com/news/mlgw-crews-working-24-7-to-restore-power-2017.
Porter, K., Terentieff, S., McMullin, R., and Irias, X. (2017). Water supply damage, recovery, and lifeline
interaction in an earthquake sequence. In Congress on Technical Advancement 2017, pages 41–52.
Rajani, B. and Makar, J. (2000). A methodology to estimate remaining service life of grey cast iron water
mains. Canadian Journal of Civil Engineering, 27(6):1259–1272.
Rajani, B. and Tesfamariam, S. (2004). Uncoupled axial, flexural, and circumferential pipe soil interaction
analyses of partially supported jointed water mains. Canadian geotechnical journal, 41(6):997–1010.
Rajani, B. and Tesfamariam, S. (2007). Estimating time to failure of cast-iron water mains. In Proceedings
of the Institution of Civil Engineers-Water Management, volume 160, pages 83–88. Thomas Telford Ltd.
Rajani, B., Zhan, C., and Kuraoka, S. (1996). Pipe soil interaction analysis of jointed water mains. Canadian
Geotechnical Journal, 33(3):393–404.
Ramamoorthy, S. K., Gardoni, P., and Bracci, J. M. (2008). Seismic fragility and confidence bounds for
gravity load designed reinforced concrete frames of varying height. Journal of structural engineering,
134(4):639–650.
Ribot, J. C. (1995). The causal structure of vulnerability: Its application to climate impact analysis.
GeoJournal, 35(2):119–122.
Rinaldi, S. M., Peerenboom, J. P., and Kelly, T. K. (2001). Identifying, understanding, and analyzing critical
infrastructure interdependencies. IEEE control systems magazine, 21(6):11–25.
197
Rowe, W. (1980). Risk assessment: Theoretical approaches and methodological problems. In Conard, J.,
editor, Society, Technology, and Risk Assessment, pages 3–29. Academic Press, New York, NY.
Rumelhart, D. E., Hinton, G. E., and Williams, R. J. (1986). Learning representations by back-propagating
errors. nature, 323(6088):533–536.
Sadiq, R., Rajani, B., and Kleiner, Y. (2004). Probabilistic risk analysis of corrosion associated failures in
cast iron water mains. Reliability Engineering & System Safety, 86(1):1–10.
Saltelli, A. (2002). Sensitivity analysis for importance assessment. Risk analysis, 22(3):579–590.
Saltelli, A., Annoni, P., Azzini, I., Campolongo, F., Ratto, M., and Tarantola, S. (2010). Variance based
sensitivity analysis of model output. design and estimator for the total sensitivity index. Computer Physics
Communications, 181(2):259–270.
Saltelli, A., Ratto, M., Andres, T., Campolongo, F., Cariboni, J., Gatelli, D., Saisana, M., and Tarantola,
S. (2008). Global sensitivity analysis: the primer. John Wiley & Sons.
Sanchez-Silva, M., Klutke, G.-A., and Rosowsky, D. V. (2011). Life-cycle performance of structures subject
to multiple deterioration mechanisms. Structural Safety, 33(3):206–217.
Sarkale, Y., Nozhati, S., Chong, E. K., and Ellingwood, B. R. (2019). Decision automation for electric power
network recovery. arXiv preprint arXiv:1910.00699.
Sauer, P. W. and Pai, M. A. (1998). Power system dynamics and stability, volume 101. Prentice hall Upper
Saddle River, NJ.
Sen, A. (1990). Development as capability expansion. In Griffin, K. and Knight, J., editors, Human development and the international development strategy for the 1990s. Macmillan.
Sen, A. (1993). Capability and well-being. In Sen, A. and Nussbaum, M., editors, The Quality of Life.
Oxford University Press, Oxford, UK.
Sen, A. (1999). Development as freedom.
Sharma, N. and Gardoni, P. (2019). Modeling the time-varying performance of electrical infrastructure
during post disaster recovery using tensors. In Gardoni, P., editor, Handbook of Sustainable and Resilient
Infrastructure, pages 259–276. Routledge.
Sharma, N. and Gardoni, P. (2020). Mathematical modeling of interdependent infrastructure: An objectoriented approach for generalized network-system analysis. Reliability Engineering & System Safety, (submitted).
Sharma, N., Nocera, F., and Gardoni, P. (2020a). Classification and mathematical modeling of infrastructure
interdependencies. Sustainable and Resilient Infrastructure, pages 1–22.
Sharma, N., Tabandeh, A., and Gadoni, P. (2019). Regional resilience analysis: A multi-scale approach to
model the recovery of interdependent infrastructure. In Gardoni, P., editor, Handbook of Sustainable and
Resilient Infrastructure, pages 521–544. Routledge.
Sharma, N., Tabandeh, A., and Gardoni, P. (2018a). Resilience analysis: A mathematical formulation to
model resilience of engineering systems. Sustainable and Resilient Infrastructure, 3(2):49–67.
Sharma, N., Tabandeh, A., and Gardoni, P. (2018b). Resilience-informed recovery optimization: a multiscale formulation for interdependent infrastructure. Computer-Aided Civil and Infrastructure Engineering,
(in preparation).
Sharma, N., Tabandeh, A., and Gardoni, P. (2020b). Regional resilience analysis: A multiscale approach to
optimize the resilience of interdependent infrastructure. Computer-Aided Civil and Infrastructure Engineering.
198
Shinozuka, M., Dong, X., Chen, T., and Jin, X. (2007). Seismic performance of electric transmission network
under component failures. Earthquake engineering & structural dynamics, 36(2):227–244.
Shinozuka, M., Murachi, Y., Dong, X., Zhou, Y., and Orlikowski, M. J. (2003). Seismic performance of highway transportation networks. In Proceedings of China-US Workshop on protection of urban infrastructure
and public buildings against earthquakes and man-made disasters.
Shinozuka, M., Rose, A., and Eguchi, R. T. (1998). Engineering and socioeconomic impacts of earthquakes.
Technical Report Monograph 98-MN02, Multidisciplinary Center for Earthquake Engineering Research
(MCEER), Buffalo, NY.
Shishko, R. and Aster, R. (1995). Nasa systems engineering handbook. NASA Special Publication, 6105.
Singhai, A. C. (1984). Behavior of jointed ductile iron pipelines. Journal of transportation engineering,
110(2):235–250.
Slovic, P. (1987). Perception of risk. Science, 236(4799):280–285.
Smith, P. and Shipman, J. (1998). Soil Survey of Clatsop County, Oregon. Technical report, United States
Department of Agriculture.
Sobol, I. and Levitan, Y. L. (1999). On the use of variance reducing multipliers in monte carlo computations
of a global sensitivity index. Computer Physics Communications, 117(1):52–61.
Sobol, I. M. (1993). Sensitivity estimates for nonlinear mathematical models. Mathematical modelling and
computational experiments, 1(4):407–414.
Song, J., Cotilla-Sanchez, E., Ghanavati, G., and Hines, P. D. (2015). Dynamic modeling of cascading failure
in power systems. IEEE Transactions on Power Systems, 31(3):2085–2095.
St. Clair, A. M. and Sinha, S. (2012). State-of-the-technology review on water pipe condition, deterioration
and failure rate prediction models! Urban Water Journal, 9(2):85–112.
Steelman, J. and Hajjar, J. F. (2008). Capstone scenario applications of consequence-based risk management
for the memphis testbed. Technical report, Mid-American Earthquake Center, Department of Civil and
Environmental Engineering, University of Illinois at Urbana-Champaign.
Steelman, J., Song, J., and Hajjar, J. F. (2007). Integrated data flow and risk aggregation for consequencebased risk management of seismic regional loss. Technical report, University of Illinois at UrbanaChampaign, Urbana, IL.
Straub, D. (2009). Stochastic modeling of deterioration processes through dynamic bayesian networks.
Journal of Engineering Mechanics, 135(10):1089–1099.
Suganthi, L. and Samuel, A. A. (2012). Energy models for demand forecasting a review. Renewable and
sustainable energy reviews, 16(2):1223–1240.
Tabandeh, A. and Gardoni, P. (2014). Probabilistic capacity models and fragility estimates for RC columns
retrofitted with FRP composites. Engineering Structures, 74:13–22.
Tabandeh, A. and Gardoni, P. (2015). Empirical Bayes approach for developing hierarchical probabilistic predictive models and its application to the seismic reliability analysis of FRP-retrofitted RC bridges. ASCEASME Journal of Risk and Uncertainty in Engineering Systems, Part A: Civil Engineering, 1(2):04015002.
Tabandeh, A., Gardoni, P., and Murphy, C. (2018a). A reliability-based capability approach. Risk Analysis,
38(2):410–424.
Tabandeh, A., Gardoni, P., Murphy, C., and Myers, N. (2018b). Societal risk and resilience analysis: Dynamic
Bayesian network formulation of a capability approach. ASCE-ASME Journal of Risk and Uncertainty in
Engineering Systems, Part A: Civil Engineering, 5(1):04018046.
199
UNDP (2015). Human Development Report 2015. United Nations Development Programme, USA.
Unnikrishnan, V. U. and van de Lindt, J. W. (2016). Probabilistic framework for performance assessment
of electrical power networks to tornadoes. Sustainable and Resilient Infrastructure, 1(3-4):137–152.
Vaiman, M., Bell, K., Chen, Y., Chowdhury, B., Dobson, I., Hines, P., Papic, M., Miller, S., and Zhang,
P. (2012). Risk assessment of cascading outages: Methodologies and challenges. IEEE Transactions on
Power Systems, 27(2):631.
Van Zandt, S., Peacock, W. G., Henry, D. W., Grover, H., Highfield, W. E., and Brody, S. D. (2012).
Mapping social vulnerability to enhance housing and neighborhood resilience. Housing Policy Debate,
22(1):29–55.
Wagner, J. M., Shamir, U., and Marks, D. H. (1988). Water distribution reliability: simulation methods.
Journal of Water Resources Planning and Management, 114(3):276–294.
Watts, D. J. and Strogatz, S. H. (1998). Collective dynamics of ’small-world’ networks. nature, 393(6684):440.
WB (2016). Pacific possible climate and disaster resilience. Technical report, The World Bank, Washington,
DC, https://www.theprif.org/documents/regional/other.
WB (2017).
Pacific possible long-term economic opportunities and challenges for pacific island countries (english).
Technical report, The World Bank, Washington, DC,
http://documents.worldbank.org/curated/en/168951503668157320.
WB (2019). Urban population. Technical report, World Development Indicators,The World Bank,
https://datacatalog.worldbank.org/ dataset/world-development-indicators.
Wolff, J. and De-Shalit, A. (2007). Disadvantage. Oxford University Press on Demand.
Woolfolk, J. (2019). Who’s to blame for California’s planned power outages? some say PG&E, others say
politicians. The Mercury News.
Worden, K., Manson, G., and Fieller, N. R. (2000). Damage detection using outlier analysis. Journal of
sound and vibration, 229(3):647–667.
World Commission on Environment and Development (1987). Report of the World Commission on Environment and Development: Our common future. Technical report, World Commission on Environment and
Development.
Wu, J. and Wang, P. (2019). A comparison of control strategies for disruption management in engineering
design for resilience. ASCE-ASME Journal of Risk and Uncertainty in Engineering Systems, Part B:
Mechanical Engineering, 5(2):020902.
Xu, H. and Gardoni, P. (2016). Probabilistic capacity and seismic demand models and fragility estimates for
reinforced concrete buildings based on three-dimensional analyses. Engineering Structures, 112:200–214.
Xu, M., Ouyang, M., Mao, Z., and Xu, X. (2019). Improving repair sequence scheduling methods for postdisaster critical infrastructure systems. Computer-Aided Civil and Infrastructure Engineering, 34(6):506–522.
Xu, N., Guikema, S. D., Davidson, R. A., Nozick, L. K., Çağnan, Z., and Vaziri, K. (2007). Optimizing scheduling of post-earthquake electric power restoration tasks. Earthquake engineering & structural
dynamics, 36(2):265–284.
Yodo, N. and Wang, P. (2016). Resilience modeling and quantification for engineered systems using bayesian
networks. Journal of Mechanical Design, 138(3):031404.
Yu, D.-m., Wu, Y., Chen, F.-d., Wang, J., Zhang, H., and LIU, W.-d. (2010). Application of helicopter
patrol technology in uhv ac transmission line. Power System Technology, 34(2):29–32.
200
Zhang, P. and Peeta, S. (2011). A generalized modeling framework to analyze interdependencies among
infrastructure systems. Transportation Research Part B: Methodological, 45(3):553–579.
Zhang, Y. and Peacock, W. G. (2009). Planning for housing recovery? Lessons learned from hurricane
Andrew. Journal of the American Planning Association, 76(1):5–24.
Zimmerman, R. (2001). Social implications of infrastructure network interactions. Journal of Urban Technology, 8(3):97–119.
201