MANU 2484 Design for
Assembly & Automation
Lecture 12: Automation Technologies for
Manufacturing Systems (part 2).
Course Coordinator: Mr. Trung Nguyen
Today’s Topics
• Computer Numerical Control: operating methodology of Open
Loop and Closed Loop CNC systems.
• Precision in Automation: how to determine the control
resolution and accuracy of an automated system.
2
Hardware for Automation – Interface
Devices
• Interface devices enables the communication between the process
and the process controller, e.g. sensor signals from the process are fed
into the computer and command signals from the computer are sent to
actuators.
• There are 4 types of Interface devices:
o Analog-to-digital converter (ADC)
o Digital-to-analog converter (DAC)
o Contact input/output interfaces.
o Pulse counter.
3
Hardware for Automation – Interface
Devices
•
Analog-to-digital (ADC) converter accomplishes 3 functions:
o Sample the continuous signal at periodic intervals.
o Converts the sampled data into one of a finite number of defined amplitude levels.
o Encode each amplitude level into a sequence of binary digits that can be interpreted
by the control computer.
•
Defining characteristics of an ADC are its sampling rate and resolutions:
o Sampling rate is the frequency with which the continuous signal is sampled.
o Resolution refers to the precision with which the analog value can be converted into
binary code.
4
Hardware for Automation – Interface
Devices
•
Example of ADC signals:
5
Hardware for Automation – Interface
Devices
•
Because the output signal from an ADC is represented in Binary form,
precision of an ADC is determined by the number of quantization levels.
•
The number of quantization levels is defined as:
𝑵𝒒 = 𝟐 𝒏
𝑵𝒒 = number of quantization levels.
𝒏 = the number of bits in the ADC.
6
Hardware for Automation – Interface
Devices
•
The Resolution of the ADC can be calculated using the quantization level as:
𝑹𝑨𝑫𝑪
𝑳
=
𝑵𝒒 − 𝟏
𝑳 = the full-scale range of the ADC (Volts).
𝑹𝑨𝑫𝑪 = resolution of the ADC, which is the length of each quantization level.
•
Quantization generates an error. The maximum possible error occurs when
the true value of the analog signal is on the borderline between two adjacent
quantization levels.
•
For most ADC, the quantization error is defined as:
𝟏
𝑬𝒓𝒓𝒐𝒓 = ± 𝑹𝑨𝑫𝑪
𝟐
7
Hardware for Automation – Interface
Devices
•
Example: A continuous voltage signal is to bee converted into its digital
counterpart using an ADC. The maximum voltage range is ±30𝑉. The ADC has
a 12-bit capacity. Determine:
a) Number of quantization levels.
b) Resolution of the ADC.
c) The quantization error for this ADC.
8
Hardware for Automation – Interface
Devices
• Digital-to-analog converter (DAC) is the reverse of the and ADC. It
converts the digital output of the control computer into a quasicontinuous signal capable of driving an analog actuator or analog
device.
• The DAC performs its function in two steps:
o Decoding: in which the sequence of digital output values is transformed
into a corresponding series of analog values at discrete time intervals.
o Data holding, in which each analog value is changed into a continuous
signal during the duration of the time interval.
10
Hardware for Automation – Interface
Devices
•
Example of DAC signals:
11
Hardware for Automation – Interface
Devices
•
Contact input/output interfaces are components used to communicate binary
data back and forth between the process and the control computer.
•
Contact input interface consists of a series of simple contacts that can either
closed or open to input the status of binary devices connected to the process.
•
Example:
Limit Switches
Solenoid Valve
12
Hardware for Automation – Interface
Devices
• A pulse counter is a device that converts a series of pulses from an
external source into a digital value, which is entered into the control
computer.
• The opposite of a pulse counter is a pulse generator, which produces
a series of electrical pulses based on digital values generated by a
control computer.
Pulse
Counter
Pulse
Generator
13
Computer Numerical Control
Technology, Positioning Systems,
Applications
Computer Numerical Control
• Numerical Control (NC) is a form of programmable automation in
which the mechanical actions of a piece of equipment are controlled by
a program containing coded alphanumeric data.
• The operating principle of NC is to control the motion of the work head
relative to the work part and to control the sequence in which the
motions are carried out.
• First application of numerical control was in Machining in 1952 at MIT.
15
Computer Numerical Control
Typical CNC Milling
Machine
Typical CNC Milling
Workshop
16
Computer Numerical Control –
Technology
• A numerical control system consists of three basic components:
o Part program: the detailed set of commands to be followed by the
processing equipment. Each command specifies a position or motion that
is to be accomplished by the work head relative to the work part.
o Machine control unit (MCU): a microcomputer that stores and executes
the program by converting each command into actions by the processing
equipment, one command at a time. The MCU also permits the part
program to be edited in case the program contains errors, or changes in
cutting condition
o Processing Equipment: accomplishes the sequence of processing steps
to transform the starting work part into a completed part.
17
Computer Numerical Control –
Technology
• A standard coordinate axis system is used to specify positions in
numerical control.
• The system consists of the three linear axes (𝒙, 𝒚, 𝒛) of the Cartesian
coordinate system, plus three rotation axes 𝒂, 𝒃, 𝒄 .
18
Computer Numerical Control –
Technology
• In most NC systems, the relative movement between the processing
tool and the work part are accomplished by fixing the part to a
worktable and then controlling the positions and motions of the table
relative to a stationary or semi-stationary work head.
• In other systems, the work part is held stationary and the work head is
moved along two or three axes
• In either systems, the motion control systems can be divided into 2
categories:
o Point-to-point systems.
o Continuous path systems.
19
Computer Numerical Control –
Technology
•
For point-to-point systems, the work head or work piece is moved to a
programmed location with no regard for the path taken to get to that location.
•
Once the move is completed, some processing action is accomplished by the
work head at the location, e.g. drilling or punching a hole
•
The program for these system consist of a series of point location at which
operations are performed.
Source Link
20
Computer Numerical Control –
Technology
•
Continuous path systems provide continuous simultaneous control of more
than one axis, thus controlling the path followed by the tool relative to the part.
•
This permits the tool to perform a process while the axes are moving, enabling
the system to generate angular surfaces, two-dimensional curves, or threedimensional contours .
Source Link
21
Computer Numerical Control –
Positioning Systems
•
The purpose of a positioning system is to convert the coordinates specified in
the NC part program into relative position between the tool and work part
during processing.
•
Positioning systems for NC systems usually employ lead screws with pitch 𝑝
measured in mm/thread or mm/rev.
22
Computer Numerical Control –
Positioning Systems
•
Two basic types of motion control are used in NC: Open loop and Closed loop.
•
Open loop systems are less expensive than closed-loop systems and are
appropriate when the force resisting the actuating motion is minimal.
•
Closed-loop systems are normally specified for machine tools that perform
continuous path operations such as milling or turning where there is significant
resisting force.
Open Loop Motion control
Closed Loop Motion control
23
Computer Numerical Control – Open
Loop Positioning systems
•
To turn the leadscrew, an open-loop positioning system typically uses a
stepping motor (a.k.a. stepper motor).
•
The stepping motor is driven by a series of electrical pulses generated by a
machine control unit. Each pulse causes the motor to rotate a fraction of one
revolution, called the step angle 𝜶.
•
The step angle is given by:
𝟑𝟔𝟎
𝜶=
(𝒅𝒆𝒈𝒓𝒆𝒆𝒔/𝒑𝒖𝒍𝒔𝒆)
𝒏𝒔
𝜶 = step angle, degrees/pulse;
𝒏𝒔 = the number of step angles for the motor, as an integer.
24
Computer Numerical Control – Open
Loop Positioning systems
•
For a given number of pulses received by the motor, the angle of motor shaft
rotation is given by:
𝑨𝒎 = 𝜶 𝒏𝒑
𝑨𝒎 = angle of motor shaft rotation, degrees
𝒏𝒑 = number of pulses received by the motor.
•
The rotational speed of the motor shaft is determined by the frequency of
pulses sent to the motor:
𝟔𝟎 𝜶 𝒇𝒑
𝑵𝒎 =
𝟑𝟔𝟎
𝑵𝒎 = speed of motor shaft rotation, rev/min.
𝒇𝒑 = frequency of pulses driving the stepper motor, Hz (pulse/sec)
25
Computer Numerical Control – Open
Loop Positioning systems
•
The connection between the motor shaft and the leadscrew is often designed
using a gear reduction to increase the precision of the table’s movement.
•
The gear reduction is characterized by a ratio 𝒓𝒈 which modifies the angle of
rotation and rotational speed of the leadscrew as:
𝑨𝒍𝒔 =
𝑨𝒎
𝒓𝒈
𝑵𝒎
𝑵𝒍𝒔 =
𝒓𝒈
𝑨𝒍𝒔 = the angle of rotation for the leadscrew, degrees.
𝑵𝒍𝒔 = the rotational speed for the leadscrew, rev/min.
26
Computer Numerical Control – Open
Loop Positioning systems
•
The linear position of the table in response to the rotation of the leadscrew
depends on the leadscrew pitch 𝑝 through the equation:
𝒑𝑨𝒍𝒔
𝒙=
𝟑𝟔𝟎
𝒙 = x-axis position relative to the starting position, mm.
𝒑 = pitch of the leadscrew, i.e. the distance between 2 consecutive crests,
mm/rev.
𝑨𝒍𝒔 /𝟑𝟔𝟎= the number of revolutions or partial revolution of the lead screw.
27
Computer Numerical Control – Open
Loop Positioning systems
•
Combining all previous equations together, we shall obtain an equation to find
the number of pulses required to achieve a specified x-position increment in a
point-to-point system:
𝟑𝟔𝟎 𝒓𝒈 𝒙 𝒓𝒈 𝒏𝒔 𝑨𝒍𝒔
𝒏𝒑 =
=
𝒑𝜶
𝟑𝟔𝟎
•
The velocity of the worktable in the direction of the leadscrew axis is:
𝒗𝒕 = 𝒇𝒓 = 𝑵𝒍𝒔 𝒑
𝒗𝒕 = the table’s travel speed, mm/min.
𝒇𝒓 = table feed rate, mm/min.
𝑵𝒍𝒔 = rotational speed of the leadscrew, rev/min.
𝒑 = leadscrew pitch, mm/rev.
28
Computer Numerical Control – Open
Loop Positioning systems
•
The rotational speed of the lead screw depends on the frequency of pulses
driving the stepping motor as:
𝑵𝒍𝒔 = 𝟔𝟎
𝒇𝒑
𝒏𝒔 𝒓𝒈
𝑵𝒍𝒔 = leadscrew rotational speed, rev/min.
𝒇𝒑 = pulse train frequency, Hz.
𝒏𝒔 = number of step angles for the motor, step/rev or pulse/rev.
𝒓𝒈 = gear reduction ratio between the motor and the leadscrew..
29
Computer Numerical Control – Open
Loop Positioning systems
•
Combining the previous equations, we can obtain another equation to link the
pulse frequency of the motor and the feed rate of the table as:
𝒗𝒕 𝒏𝒔 𝒓𝒈 𝒇𝒓 𝒏𝒔 𝒓𝒈 𝑵𝒍𝒔 𝒏𝒔 𝒓𝒈 𝑵𝒎 𝒏𝒔
𝒇𝒑 =
=
=
=
𝟔𝟎𝒑
𝟔𝟎𝒑
𝟔𝟎
𝟔𝟎
•
Note that the equations we obtained so far are for one axis only.
•
For a two-axis table with point-to-point control, the velocity and position of
the table along each axis can be calculated independently from each other.
•
For a two-axis table with continuous path control, the relative velocities of
the axes are coordinated to achieve the desired travel direction via a closed
loop.
30
Computer Numerical Control – Open
Loop Positioning systems Example
•
Example: A stepping motor has 48 step angles. Its output shaft is coupled to a
leadscrew with a 4:1 gear reduction (four turns of the motor shaft for each turn
of the leadscrew). The leadscrew pitch is 5 mm. The worktable of a positioning
system is driven by the leadscrew. The table must move a distance of 75.0 mm
from its current position at a travel speed of 400 mm/min. Determine:
a) How many pulses are required to move the table for the specified
distance?
b) What is the required motor speed in round-per-minute?
c) What is the pulse frequency required to achieve the desired table speed?
31
Computer Numerical Control –
Closed Loop Positioning systems
32
Computer Numerical Control –
Closed Loop Positioning systems
•
Closed-loop NC systems use servomotors and feedback measurements to
ensure that the desired position is achieved.
•
A common feedback sensor used in NC and industrial robotics is the optical
rotary encoder.
As the leadscrew rotates, the
slots cause the light source to
be seen by the photocell as a
series of flashes, which are
converted into an equivalent
series of electrical pulses.
33
Computer Numerical Control –
Closed Loop Positioning systems
•
All previous equations for Open Loop Positioning systems will apply for the
Lead Screw and table in the Closed-Loop Positioning system.
•
For the optical rotary encoder, the angle between slots in the disk must satisfy
the following requirements:
𝟑𝟔𝟎
𝜶=
𝒏𝒔
𝜶 = angle between slots, degrees/slot.
𝒏𝒔 = the number of slots in the disk.
34
Computer Numerical Control –
Closed Loop Positioning systems
•
For a given angular rotation of the leadscrew, the encoder generates a number
of pulses given by:
𝑨𝒍𝒔 𝑨𝒍𝒔 𝒏𝒔
𝒏𝒑 =
=
𝜶
𝟑𝟔𝟎
𝒏𝒑 = pulse count.
𝑨𝒍𝒔 = angle of rotation of the leadscrew, degrees.
𝜶 = angle between slots in the encoder, degrees/pulse.
35
Computer Numerical Control –
Closed Loop Positioning systems
•
We can use the previously derived equation to calculate the measured
displacement of the worktable and its measured feed rate as:
𝒑 𝒏𝒑
𝒑 𝑨𝒍𝒔
𝒙=
=
𝒏𝒔
𝟑𝟔𝟎
𝟔𝟎𝒑 𝒇𝒑
𝒗𝒕 = 𝒇𝒓 =
𝒏𝒔
•
The series of pulses generated by the encoder is compared with the coordinate
position and feed rate specified in the part program, and the difference is used
by the machine control unit to drive a servomotor that in turn drives the
leadscrew and worktable.
36
Computer Numerical Control – Closed
Loop Positioning systems Example
•
Example: An NC worktable is driven by a closed-loop positioning system
consisting of a servomotor, leadscrew, and optical encoder. The leadscrew has
a pitch of 5.0 mm and is coupled to the motor shaft with a gear ratio of 4:1 (four
turns of the motor for each turn of the leadscrew). The optical encoder has 100
slots/rev of the leadscrew. The table has been programmed to move a distance
of 75.0 mm at a feed rate of 400 mm/min. Assume there is zero resistance
(typical during calibration), determine:
a) How many pulses should be received by the control system to verify the
travel of the worktable?
b) What is the pulse rate measured by the control system.
37
Precision in Automation
Control resolution, accuracy, and
repeatability
Precision in Automation
• There are 3 critical measures of precision in positioning:
o Control Resolution.
o Accuracy
o Repeatability.
The tool paths
necessary to rough
and finish turn a part in
a CNC lathe are
computer generated.
39
Precision in Automation– Control
Resolution
• Control resolution refers to the system’s ability to divide the total
range of the axis movement into closely spaced points that can be
distinguished by the control unit.
• The distance between two adjacent control points determines the
control resolution. It is desirable that the control resolution be as small
as possible.
• Control resolution is limited by 2 factors:
o The electro-mechanical components of the positioning system.
o The number of bits used by the controller to define the axis coordinate
location.
40
Precision in Automation– Control
Resolution
•
The expression of Control Resolution for an open-loop positioning system
driven by a stepper motor with a gear reduction between the motor shaft and
the lead screw is:
𝒑
𝑪𝑹𝟏 =
𝒏𝒔 𝒓𝒈
𝑪𝑹𝟏 = the control resolution of the electromechanical components, mm.
𝒑 = the pitch of the leadscrew, mm/rev.
𝒏𝒔 = number of steps in the motor, steps/rev.
𝒓𝒈 = the gear reduction ratio.
41
Precision in Automation– Control
Resolution
•
The expression of Control Resolution for the encoder in a closed-loop
positioning system is:
𝑪𝑹𝟏 =
𝒑
𝒏𝒔
𝑪𝑹𝟏 = the control resolution of the electromechanical components, mm.
𝒑 = the pitch of the leadscrew, mm/rev.
𝒏𝒔 = number of slots in the optical encoder, slots/rev.
Note: the gear reduction ratio is irrelevant since there is no gear reduction for the optical
encoder.
42
Precision in Automation– Control
Resolution
•
The second possible factor that could limit control resolution is the number of
bits defining the axis coordinate value.
•
This limitation may be imposed by the bit storage capacity of the controller.
Its relationship with the Control Resolution is given by the formula:
𝑪𝑹𝟐 =
𝑳
𝟐𝑩 − 𝟏
𝑪𝑹𝟐 = the control resolution of the computer control system, mm.
𝑩 = the number of bits in the storage register for the axis.
𝑳 = the axis range, mm.
Note: This factor is not applicable to the Rotary Encoder.
43
Precision in Automation– Control
Resolution
•
The Control Resolution of the positioning system is the maximum of the two
values 𝐶𝑅1 and 𝐶𝑅2 :
𝑪𝑹 = 𝑴𝒂𝒙 {𝑪𝑹𝟏 , 𝑪𝑹𝟐 }
•
In most systems, 𝑪𝑹𝟐 ≤ 𝑪𝑹𝟏 , meaning that the electromechanical system is
the limiting factor in control resolution.
•
The Control Resolution is usually not displayed on the datasheet of the CNC
systems, but the accuracy will be shown instead.
Datasheet of PVLB-850 CNC system at RMIT SGS
44
Precision in Automation– Accuracy
•
The accuracy of any given axis of a positioning system is the maximum
possible error that can occur between the desired target point and the actual
position taken by the system.
•
Mechanical errors occur due to a variety of inaccuracies and imperfections in
the system, such as the contact between the leadscrew and the worktable,
backlash in the gears, or deflections of machine components.
•
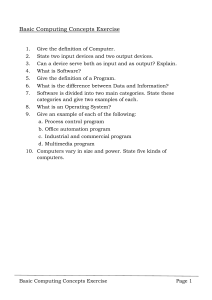
In engineering design, errors are quantified as a statistical normal distribution
which assumes that 99.73% of mechanical errors are contained within ±3
standard deviations (𝜎) from the mean value.
45
Precision in Automation– Accuracy
•
Illustration of Standard Deviations.
46
Precision in Automation– Accuracy
•
Since the system can only move to one or the other of the control points, there
will be an error in the final position of the worktable. If the target were closer to
one of the control points, then the table would be moved to the closer control
point.
•
The worst-case scenario is when the target is exactly in the middle of 2
control points. Hence, we can define an equation to quantify the accuracy of
the system:
𝑨𝒄𝒄𝒖𝒓𝒂𝒄𝒚 = 𝟎. 𝟓 𝑪𝑹 + 𝟑𝝈
𝑪𝑹 = the control resolution, mm.
𝝈 = standard deviation of the error distribution, mm.
47
Precision in Automation– Accuracy
•
Repeatability refers to the capability of a positioning system to return to a
given control point that has been previously programmed.
•
Location errors are also a manifestation of the mechanical errors of the
positioning system, which can also be assumed to be a normal distribution.
•
Thus the repeatability of any given axis of a positioning system can be
defined as the range of mechanical errors associated with the axis as:
𝑹𝒆𝒑𝒆𝒂𝒕𝒂𝒃𝒊𝒍𝒊𝒕𝒚 = ±𝟑𝝈
𝝈 = the standard deviation of the error distribution, mm.
48
Precision in Automation
•
Illustration of the Control Resolution, accuracy, and repeatability of a linear
positioning system axis:
49
Precision in Automation - Example
•
Example: A CNC system has a stepping motor with 48 steps angles. The
output shaft is coupled to a leadscrew with a 4:1 gear reduction ratio. The
leadscrew pitch is 5.0 mm. The mechanical inaccuracies in the positioning
system can be described by a normal distribution whose standard deviation is
0.005 mm. The range of the worktable axis is 550 mm. The digital controller is
a binary 16 bits system. Determine:
a) Repeatability.
b) The system’s Control Resolution.
c) Accuracy.
50
Questions?
The only stupid question is the one that was not
asked.
Copyright © 2019 RMIT University Vietnam