Normalized Prediction Error Generalizations: ARMA Models & More
advertisement

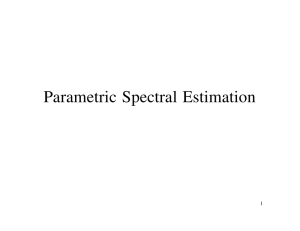
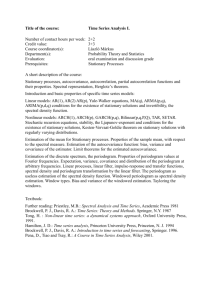
Generalizations of the Normalized Prediction Error Asker M. Bazen and Cornelis H. Slump University of Twente, Department of Electrical Engineering, Laboratory of Signals and Systems, P.O. box 217 - 7500 AE Enschede - The Netherlands Phone: +31 53 489 2673 Fax: +31 53 489 1060 E-mail: a.m.bazen@el.utwente.nl Abstract — The Normalized Prediction Error, or NPE, can be used for the evaluation of the fit of AR models, which are estimated from signals that are generated by an AR process. The NPE does not only provide a measure of the time domain fit, but also of the frequency domain fit of an estimated model. Therefore, it is a measure that can very well be used for comparison of different estimates. In this paper, generalizations of the NPE are proposed that enable the application of the NPE to complex valued ARMA models and processes, to sinusoids in correlated ARMA noise and to the periodogram. The last extension is achieved by a method that rewrites the periodogram as an exactly equivalent MA(n − 1) model. Keywords— signal processing, spectral estimation, time series analysis. scribes an extension to the NPE that enables the application to complex valued ARMA processes and models. Section IV gives a further generalization to processes that contain complex sinusoids in correlated ARMA noise. To compare the periodogram to ARMA estimates, in section V, a method is proposed that provides the MA(n−1) model that is exactly equivalent to the periodogram. Unlike other methods, this method is exact, does not make use of iterative matrix inversions, and can be applied to complex valued signals as well. In section VI, the results of some simulation experiments are discussed, and in section VII, the conclusions of this paper are given. In appendix A, the Matlab software that is available with this paper is discussed. I. Introduction II. Normalized Prediction Error Many methods exist for spectral analysis of time series that originate from stochastic processes. To compare these methods, a measure is needed that evaluates the fit of an estimated model to the process that generated the data. The Normalized Prediction Error, or NPE, provides such a measure. It can be used for comparison of different spectral estimates or different estimation methods. Furthermore, it can be used for evaluation and tuning of a certain method of interest. In this section, the basics of the Normalized Prediction Error, or NPE, are discussed. The NPE is a measure that evaluates estimated AR models, both in the time- and in the frequency-domain. The basis of this method is linear prediction. This section is organized as follows. First, in section II-A, the AR process and model are discussed. Then, in section II-B, a derivation of the Prediction Error, or PE, is given, using the theory of linear prediction. In section II-C, it will be shown that the time-domain NPE represents a frequency-domain measure as well and finally, in section II-D, the relations that are given in the previous sections are illustrated by a numerical example. Section II describes the basics of the NPE. The main part of this section is already known from literature [7] [5] [4]. In this section, a derivation of the NPE is given and it will be shown that the NPE provides a time- and frequency-domain measure of the fit of an estimated AR model to the AR process that generated the data. In the remaining part of this paper, three generalizations of the NPE are proposed. Section III deISBN: 90-73461-18-9 A. Autoregressive Process and Model An autoregressive process generates the time series x1 , . . . , xn as the response of an all-pole filter to the white noise series εi . The AR(p) process, which is an autoregressive process of order p, is given by: 631 c STW, 1999 10 19-01:094 632 Asker M. Bazen, Cornelis H. Slump xi + a1 xi−1 + · · · + ap xi−p = εi (1) In this expression, ai are the autoregressive parameters. It is always possible to approximate the structure of the series by the estimation of an AR(p) model, whether stochastic time series are generated by an AR process or not. The AR model describes the observations xi as the response of an estimated all-pole filter to estimated white noise residual series ε̂i . The estimated AR(p) model is given by: xi + â1 xi−1 + · · · + âp xi−p = ε̂i (2) In this model, âi are the estimated autoregressive parameters. The AR model may for instance be estimated by the Burg method or the Yule-Walker method, both providing an AR model that has a guaranteed positive semi-definite autocovariance function. As an important consequence, this provides a valid power spectral density function that contains no negative power. The conditions that all poles λi of the transfer function are inside the unit circle, or that all reflection coefficients or partial correlations ki are inside unit circle, provide this type of autocovariance function as well. B. Linear Prediction The estimated AR model can be used for linear prediction. Linear prediction means that the AR model is used to predict xi as a linear combination of the previous samples xi−1 , . . . , xi−p . The calculation of x̃i , which is the prediction of xi , is given by the following expression: x̃i = −â1 xi−1 − · · · − âp xi−p (3) which is easily constructed using expression (2). A measure for the time domain fit of the estimated AR model to the process that generated the data follows naturally from linear prediction. The one step ahead error of prediction, ηi , is given by: ηi = x̃i − xi (4) and the Prediction Error, or PE, is defined as the variance of this error: h i h PE = E |ηi |2 = E |x̃i − xi |2 i (5) It is important to keep in mind that the PE measures the fit of an estimated AR model to new and εi 1 A(z) ηi xi Â(z) Fig. 1. Block-diagram that illustrates the calculation of the Prediction Error, or PE. In this diagram, series xi is generated by an AR process 1/A(z) from white noise εi . The AR model 1/Â(z) is estimated from the series and the inverse of this model, which is Â(z), is used to find the one step ahead errors of prediction ηi . independent data from the same process. Stating it in other words: an AR model that provides a good description of the process that generated the data will have a low value of PE, while a model that only provides a good description of the series x from which the model is estimated still has a high PE. Once an AR model is estimated and the generating AR process is known, it is possible to find an expression for PE without applying the procedure of generating more data from the same process, predicting the next samples, calculating the one step ahead error of prediction, and determining the variance of this errors, as described by expressions (1) and (3) to (5). Instead, an expression for PE is found that is only a function of the AR process that generated the data and the AR model that is estimated from the data. This method makes use of the Prediction Error Filter, or PEF, which filters the series in order to obtain the one step ahead error of prediction ηi . The expression for the PEF is found by substituting expression (3) into expression (4): ηi = −(xi + â1 xi−1 + · · · + âp xi−p ) (6) From this expression, it can be seen that the PEF is a FIR filter, that is built from the parameters of the estimated AR model. Therefore, the PE can be found by filtering the series with the inverse of the estimated model. This is illustrated by the block-diagram in figure 1. In this diagram, the AR process is denoted by A(z), A(z) = 1 + a1 z −1 + · · · + ap z −p (7) where z −1 is used as a back-shift operator. Using the notations in the diagram, PE can be calculated as as the variance of the output ηi of the PEF : PE = ση2 (8) STW/SAFE99 Generalizations of the Normalized Prediction Error which is the output variance of an ARMA process. As will be shown in section III-A, PE can now be calculated as: PE = âH · R · â (9) where the estimated parameter vector âi is defined as: âi = 1 â1 .. . (10) âp âH denotes the hermitian transpose of â: âH = h 1 â∗1 · · · â∗p R= Rxx (0) Rxx (−1) · · · Rxx (−p) .. Rxx (1) Rxx (0) . .. .. .. . . . Rxx (p) ··· · · · Rxx (0) (11) Rxx (k) = E [(xi − µx )∗ · (xi+k − µx )] In order to eliminate the dependence of this quality measure on the variance σx2 , PE is normalized with respect to the input variance σε2 of the process. This results in the Normalized Prediction Error, or NPE, which is defined as: R · â σε2 (15) The NPE provides a variance independent timedomain measure of the fit of an estimated AR model to the process that generated the data, which has to be known. If the estimated model is perfect, which means that its parameters exactly equal those of the process, it will have NPE = 1. This means that this IEEE/ProRISC99 Sxx (ω) = σε2 1 2π |1 + a1 e−jω + · · · + ap e−jpω |2 (16) In [6], a spectral distance measure JA is presented that provides a frequency domain measure of fit of an estimated AR model to the generating AR process: 1 JA = 2π Z π −π Â(ejω ) − A(ejω ) A(ejω ) 2 dω (17) which can be interpreted as the integrated relative inverse spectral error. Using JA and the diagram of figure 1, NPE can be written as: NPE = 2 Â(z) A(z) 1 = 2π Z Â(ejω ) A(ejω ) 2 Â(ejω ) − A(ejω ) A(ejω ) 2 1 = 2π π −π dω (18) Z π −π dω + 1 and the relation between the time-domain NPE and the frequency-domain JA is given by: (14) For an AR estimate â, NPE can be expressed as: NPE = âH · In the previous section, the time domain fit of a model to a process, provided by the NPE, is discussed. In this section, it will be shown that the NPE provides a measure of the fit of the estimated model to the process that generated the data in the frequency-domain as well. The power spectral density of an AR(p) process is given by: (13) For an AR process, the autocovariance function can be calculated by expression (25) in section III-A. PE σε2 C. Frequency-domain representation of NPE (12) where the autocovariance function Rxx (k) is defined as: NPE = model will predict as much as is possible. Other models will result in higher NPE values, since their predictions are not the best ones that are possible. i Furthermore, the autocovariance matrix R is given by: 633 JA = NPE − 1 (19) Therefore, a low value of NPE indicates a good fit in the time domain as well as a good fit in the frequencydomain. D. Example In this section, the results of the previous sections are illustrated by an example. The relations between the spectral errors and their corresponding NPE values are shown for the simple AR(1) case. The process that is used in this example is given by: 634 Asker M. Bazen, Cornelis H. Slump εi 15 1 A(z) xi vi B(z) 10 Power (dB) 5 Fig. 3. Block-diagram of the ARMA process B(z)/A(z) 0 III. NPE for Complex Valued ARMA Models −5 The series x1 , . . . , xn might be generated by a complex valued autoregressive-moving average, or ARMA(p, q), process, given by −10 −15 −0.5 0 Normalized Frequency 0.5 xi + a1 xi−1 + · · · + ap xi−p = Fig. 2. Example of AR(1) power spectral densities. The solid line depicts the process, the dotted line a model with an error in |a| and the dash-dot line depicts a model with an error in f . The corresponding values of NPE are given in table I TABLE I Spectra and NPE of AR(1) Sxx (ω) Process Model 1 Model 2 Linestyle solid dotted dash-dot |a| 0.9 0.8 0.9 f 0.3 0.3 0.2 NPE 1 1.05 2.63 xi + axi−1 = εi (20) a = −|a| · ej2πf = −0.9 · ej2π·0.3 (21) with: where f is the peak frequency, normalized to the sample frequency. In this example, AR(1) models are chosen with a small error with respect to the process. This error might be either in |a| or in f . In figure 2, the power spectral density functions of these 2 models are depicted, together with the spectrum of the process. Table I shows the exact parameters of the models and the corresponding values of NPE. From the figure, it can be seen that variations in |a| do not have much influence on the power spectral density function. The value of NPE is, for this case, not much greater than 1, as shown in the table. This agrees with the observation that was made in the spectrum. However, it can also be seen that a change in the relative peak frequency of the model has great influence, both on the spectrum and on the NPE. εi + b1 εi−1 + · · · + bq εi−q (22) which describes a series as the response of a filter that contains p poles and q zeros to white noise εi . In case an ARMA model is estimated from the data, the definition of the NPE is not as obvious as it was in the purely autoregressive case, since linear prediction is only possible using a finite order AR model. However, the PEF approach will lead to a solution for the ARMA case. First, in section III-A, the calculation of the autocovariance function of a complex valued ARMA process is discussed. This is used as one of the basics in the derivation of the NPE for ARMA, as discussed in section III-B. A. Autocovariance Function of ARMA Process The autocovariance function Rxx (k) of an ARMA process, and especially the variance gain of an ARMA process, is an important feature. Unlike other derivations of this function [3] [1], the solution that is presented in this paper is simple, elegant and correct. Furthermore, it is a solution that also applies to complex valued processes. The calculation of the autocovariance function of an ARMA process is illustrated by the block diagram in figure 3. In this figure, intermediate series vi are used to describe the ARMA process: vi + a1 vi−1 + · · · + ap vi−p = εi (23) xi = vi + b1 vi−1 + · · · + bq vi−q (24) STW/SAFE99 Generalizations of the Normalized Prediction Error The variance gain of the ARMA process is given by σx2 /σε2 . The autocovariance function Rvv (k) of vi is calculated as the autocovariance function of an AR process, which can be derived from the matrix normal equations [5]: p Y 1 2 σ · ε 2 i=1 1 − |ki | Rvv (k) = k X − ak,l Rvv (k − l) k=0 635 Rvv (k) = Rvv (k) (31) Rvv (k − 1) · · · Rvv (k − q) .. Rvv (k + 1) Rvv (k) . .. .. .. . . . Rvv (k + q) ··· ··· Rvv (k) and (25) k≥1 b= l=1 where ki are the corresponding reflection coefficients of the AR part (23) and ak,l is the l-th parameter of the k-th order AR model. Both AR representations are related by the Levinson-Durbin recursion. The autocovariance function Rxx (k) of xi can now be found by making use of the fact that xi is a linear combination of vi , . . . , vi−q . Therefore, pre-multiplying expression (24) by x∗i−k leads to: 1 b1 .. . (32) bq From expression (30), the variance σx2 of series xi is found to be σx2 = Rxx (0) = bH · Rvv (0) · b (33) This result will be used to find an expression for the NPE with ARMA process and models in the next section. B. Normalized Prediction Error x∗i−k xi = x∗i−k vi + b1 x∗i−k vi−1 + · · · + bq x∗i−k vi−q (26) in which ∗ ∗ ∗ x∗i−k = vi−k + b∗1 vi−k−1 + · · · + b∗q vi−k−q (27) is substituted. Taking the expectation of both sides of the result, collecting the terms that are autocovariance functions Rxx (k) and Rvv (k), and crosscovariance function Rxv (k), which is defined as: Rxv (k) = E [(vi − µv )∗ · (xi+k − µx )] (29) since xi is does not depend on future values of vi , will finally result in the autocovariance function Rxx (k) of an ARMA process: Rxx (k) = bH · Rvv (k) · b In this expression, Rvv (k) is defined as: IEEE/ProRISC99 D(z) = Â(z)B(z) (34) C(z) = A(z)B̂(z) (35) (28) and using that Rxv (k) = 0 for k < 0 Although an estimated ARMA model cannot directly be used for linear prediction, it is possible to define a Prediction Error Filter for this case. A block diagram of this situation is depicted in figure 4. The series xi is assumed to be generated by an ARMA process B(z)/A(z). Now, the Prediction Error Filter is given by the ARMA filter Â(z)/B̂(z), applied to xi . Both ARMA filters can be merged to one filter D(z)/C(z), with (30) Now, the NPE can be found as the variance gain of this new ARMA model D(z)/C(z), using expression (33): NPE = ση2 Rvv = dH · 2 · d 2 σε σε (36) Since each ARMA model can be written as a infinite order AR model [7], the spectral distance measure JA , as defined in expression (17), can be used to show the frequency domain equivalence of the ARMA version of the NPE as well. 636 εi Asker M. Bazen, Cornelis H. Slump B(z) A(z) εi εi 1 C(z) xi Â(z)B(z) A(z)B̂(z) Â(z) B̂(z) ηi lead to a one step ahead error of prediction ηi with variance: ση2 > 0 (38) Therefore, normalizing the PE of an estimated model to the input variance σε2 , will lead to: ηi NPE = ∞ ηi vi D(z) (39) for all non-perfectly estimated models. Of course this is not a measure that provides useful results. However, the addition of correlated noise makes the process stochastic with: σε2 6= 0 for x stochastic Fig. 4. Block-diagram that illustrates the Prediction Error Filter for the case of an ARMA model and an ARMA process. The upper part of the figure depicts the ARMA process B(z)/A(z) and the Prediction Error Filter Â(z)/B̂(z). Both blocks are merged in the middle part of the figure, and split again in the lower part. Now, NPE equals ηi /εi , which is the variance gain of the ARMA process D(z)/C(z). (40) enabling a useful definition of the NPE. In section IV-A, the process that contains sinusoids in correlated noise is analyzed. This will lead to a derivation of the Normalized Prediction Error for this class of processes in section IV-B. A. Analysis of the Process IV. NPE for Sinusoids in Noise In this section, a method is presented that extends the Normalized Prediction Error to processes that consist of sinusoids in additive correlated gaussian noise. This enables the comparison of the performance of various spectral estimates also for this type of processes. If a signal contains sinusoids in correlated noise, it is often sufficient to estimate the frequencies and power of the sinusoidal components. Therefore, most measures only use these characteristics of the process to evaluate the spectral estimate [4]. The NPE provides a measure of fit for the entire power spectral density function, as was shown in section II-C. Therefore, not only the correct modeling of frequency peaks, but also the description of the colored noise is taken into account in this measure. The process generates the series xi as the sum of a sinusoid si and noise ni : xi = si + ni (41) The Signal to Noise Ratio, or SNR, is defined as the ratio between the powers of signal and noise: SNR = σs2 /σn2 (42) The noise ni is assumed to be the response of an ARMA process to white noise εi . The sinusoid si , which is a deterministic series, is given by: si = σs ej(2πf i+φ) (43) where f is the relative frequency and φ is a random phase offset in the interval [0, 2π]. The sinusoid has an autocovariance function Rxx (k) that is given by: Since a pure sinusoid is a deterministic series, it has no input noise εi , or: Rss (k) = σs2 ej2πf k σε2 = 0 for x deterministic A complex valued sinusoid can be represented by an AR(1) process As (z): (37) In other words: when the process is known exactly, it can be predicted perfectly. However, the application of an estimated ARMA model as PEF will always (44) As (z) = 1 + as z −1 (45) that has a pole exactly at the unit circle: STW/SAFE99 Generalizations of the Normalized Prediction Error δi σs As (z) εi B n (z) An (z) si xi Â(z) B̂(z) ηi ni Fig. 5. Diagram of sinusoid si , correlated noise ni , sum of both xi and estimated ARMA model used as Prediction Error Filter. 637 δi ui σs As (z)B̂(z) εi B n (z) An (z)B̂(z) Â(z) wi Fig. 6. Rearranged diagram that makes the estimated model purely autoregressive. NPE = âH · |as | = 1 6 as = −2πf (46) (47) This AR process has an input δi which is a delta pulse. The series xi are generated by this AR(1) process according to: xi + as xi−1 = δi (48) The situation is illustrated by the diagram of figure 5. In this figure, the lower left block generates the ARMA noise ni and the upper left part is the AR process that generates the sinusoid si . It can be seen that the input to this process is a delta pulse δi instead of white noise εi . The signal xi is the sum of the sinusoid si and the noise ni . According to the definition of expression 14, the Normalized Prediction Error can be written as: NPE = ση2 /σε2 (49) Using figure 5, the prediction error series ηi can be obtained by filtering the signal with the Prediction Error Filter, which equals the inverted estimated ARMA model. This is depicted in the rightmost part of the figure. The diagram can be rearranged in such a way, that the estimate is purely autoregressive. This causes the MA part of the estimate to be included in the process, as shown in figure 6. As is known from the calculation of the Normalized Prediction Error in the purely stochastic case, in this situation, the NPE can be calculated by: IEEE/ProRISC99 Rvv · â σε2 (50) The problem of calculating NPE by this expression is easiest solved in 2 steps: • first, all signals are normalized with respect to σε2 . • then, Rvv is calculated. Using the signals as defined in figure 6, the autocovariance function Rww (k) of the stochastic part wi is easily calculated as the autocovariance function of an ARMA process, as given in expression 30. The autocovariance function Ruu (k) of ui is found by taking a closer look at the AR process σs /As (z)B̂(z), with: As (z)B̂(z) = (1 + as z (51) −1 ) · (1 + b̂1 z = 1 + (as + b̂1 )z B. Derivation of the NPE ηi vi −1 −1 + · · · + b̂q z + (as b̂1 + b̂2 )z −2 −q ) + · · · + as b̂q z −q−1 that describes the sinusoid after moving the MA part of the ARMA estimate into the process. It will be shown that this process can be replaced by an AR(1) process that is exactly equivalent for an impulse input. Applying partial fraction expansion to this AR(q + 1) process results in a sum of (q + 1) AR(1) processes, where q is the MA order of the estimated ARMA model. Only one of the resulting AR(1) processes has its pole exactly at the unit circle. This pole turns out to have exactly the same location as the pole of the original AR process As (z). By definition, we are only interested in the stationary solution. Since the inputs of the (q+1) AR(1) processes are delta pulses, only the non-decaying process, which is the one that has its pole at the unit circle, will provide a non-zero stationary solution. Therefore, 638 δi εi Asker M. Bazen, Cornelis H. Slump si σs As (z) B n (z) An (z)B̂(z) ui c σs vi ηi Â(z) wi Fig. 7. Simplified diagram for calculation of NPE. figure 6 can be simplified to the diagram of figure 7, by only keeping this one AR(1) process. As a result of the partial fraction expansion, a factor c/σs , given by: q Y c as = σs i=1 as + λi (52) has to be introduced in the block diagram. In this factor, λi are the roots of the estimated MA parameter vector B̂(z). In other words, the only effect of the introduction of the MA filter into the sinusoidal process is a multiplication factor. Another way of looking at this is that this factor originates from the frequency response of the MA filter at the sinusoid frequency. Using this result, it is possible to complete the normalization, which was the first step in calculating the NPE. Normalizing ui with respect to σε2 now gives for σu2 : σu2 = SNR · 2 |c| · σs2 " 2 σw σε2 # (53) and the autocovariance function Ruu (k) of ui is found to be, using expression (43): Ruu (k) = σu2 ej2πkf (54) Finally, summing both autocovariance functions: Rvv (k) = Ruu (k) + Rww (k) (56) enables the use of expression 50 to calculate the NPE: NPE = âH · Rvv · â The periodogram is the most widely used numerical spectral estimator, since it uses the computationally efficient Fast Fourier Transform. For the comparison of the periodogram to parametric methods by means of a quantitative parametric measure like the NPE, a method is needed to represent the periodogram by an equivalent parametric model. Since the autocovariance function of the periodogram equals zero beyond lag (n − 1), where n is the number of observations, it can be represented by a moving average (MA) model of order (n − 1). For the calculation of the equivalent MA representation of a periodogram, only methods that yield an approximation are known from literature. The method proposed in [9] includes iterative matrix inversions and cannot be applied to complex valued models. The method of [8] can be used with complex valued data, but it only provides an approximation. In this paper, a new method is presented that provides the exactly equivalent MA(n − 1) representation of the periodogram. This method is exact, not iterative, and can be applied to complex valued signals as well. In section V-A, an analysis of the relevant characteristics of the periodogram will be made. It will be shown why it is possible to represent the periodogram by an exactly equivalent MA(n − 1) model. In Section V-B, the method to find this representation will be presented. This method will be used in simulation experiments that are presented in section VI. A. Analysis of the Periodogram For series x = x1 , . . . , xn , which is tapered by a window w, the periodogram P̂xx is calculated using the Fast Fourier Transform by: 1 (58) |FFT (w · x)|2 n In the rest of the text, the window w is assumed to be already included in the series x. Now, the autocovariance function that represents the periodogram is the biased estimate: P̂xx = (55) leads to an expression for Rvv . This, and the fact that everything is normalized to σε2 = 1 V. Periodogram as MA(n − 1) (57) X 1 n−k x∗l · xl+k R̂xx (k) = n 0 k ≤n−1 l=1 (59) k≥n Since this autocovariance function equals zero beyond lag n − 1, it is possible to represent the periodogram by an equivalent moving average model of STW/SAFE99 Generalizations of the Normalized Prediction Error order n − 1, as will be shown below. An MA(q) model describes time series x as the response of a FIR filter of order q to white noise ε̂: xi = ε̂i + b̂1 ε̂i−1 + · · · + b̂q ε̂i−q 639 When comparing the periodogram to MA spectral estimates and noticing that hi = bi , the equivalence can be seen: (60) Therefore, the impulse response ĥ of the MA(q) model equals the parameter vector b̂: ĥ = b̂ (61) Pxx ∼ |F(x)|2 (66) Sxx ∼ |F(h)| (67) where F denotes the Fourier transform. Therefore, by taking hi = xi in which these vectors are defined as: ĥ = ĥ0 , ĥ1 , . . . , ĥq (62) b̂ = 1, b̂1 , . . . , b̂q (63) The autocovariance function R̂xx (k) of the MA(q) model is given by: q X 2 b̂∗l−k b̂l σ̂ ε R̂xx (k) = k≤q ∗ Rxx (z) = h(z)h̃ (z) (69) where (64) (70) Rxx (−n + 1)z Rxx (1)z k>q with b̂0 = 1. The autocovariance function of an MA(q) model equals zero for lags beyond q. The power spectral density function Ŝxx (ω) of the MA(q) model is given by, (68) an impulse response hi that matches the periodogram is found. However, in general, this impulse response will not be minimum phase. In z-notation, the autocovariance function Rxx (z) of a transfer function model is given by: Rxx (z) = l=k 0 2 −1 n−1 + · · · + Rzz (−1)z + Rxx (0) + + · · · + Rxx (n − 1)z −(n−1) and h(z) = h0 + h1 z −1 + · · · + hn−1 z −(n−1) (71) ∗ Ŝxx (ω) = σ̂ε2 · 1 + b̂1 e−jω + · · · + b̂q e−jqω 2π 2 (65) Because of the similar structure of the periodogram and the MA(n − 1) model, both having a finite length autocovariance function, the MA model can be used as a parametric representation of the periodogram. B. Description of the Method The problem in representing the periodogram by an MA(n − 1) model is to find the impulse response that exactly fits the given autocovariance function of the periodogram. Furthermore, usage of the NPE requires that the impulse response is minimum phase, which means that all zeros of the transfer function have to be inside the unit circle. If not, the NPE will not provide correct results. In this section, a method is presented to calculate the MA(n − 1) model that matches the periodogram exactly. IEEE/ProRISC99 Furthermore, h̃ (z) denotes the z-transform of the complex conjugated reversed sequence h: ∗ h̃ (z) = h∗0 + h∗1 z 1 + · · · + h∗n−1 z n−1 (72) The zeros of Rxx (z) are determined by the zeros of ∗ h(z) and their counterparts of h̃ (z). It can be seen ∗ easily that the zeros of h̃ (z) are the same as those of h(z), but mirrored in the unit circle. In order to find the minimum phase solution, the ze∗ ros of Rxx (z) are redistributed over h(z) and h̃ (z), in such a way that h(z) is the polynomial that is built up from the zeros of the autocovariance function that ∗ are inside the unit circle. Now, h̃ (z) contains all zeros that are outside the unit circle. This way, the impulse response h is the minimum phase solution we are looking for. • Two additional remarks: The minimum phase solution by is determined by choosing all zeros of the autocovariance function 640 that are inside the unit circle and should therefore belong to the minimum phase solution. In effect, this is the same as mirroring all zeros of the impulse response that are outside the unit circle into it. When the input of the algorithm is a finite length autocovariance function Rxx (k) instead of the series x, it is, in some cases, possible to represent this autocovariance function by an MA(q) model. This is carried out by the following procedure. First, the zeros of Rxx (z) are determined. This may have two different resulting sets of zeros: – If the zeros appear in pairs that are mirrored in the unit circlewith respect to each other, the rest of the procedure that is described above can be followed. This will lead to the desired MA(q) model. – However, if the zeros do not appear in mirrored pairs, it is not possible to represent the given autocovariance function by an MA model. For example, if: Rxx (z) = 0.8z 1 + 1 + 0.8z −1 70 60 50 40 Power (dB) • Asker M. Bazen, Cornelis H. Slump 30 20 10 0 −10 −20 −0.5 0 Normalized Frequency 0.5 Fig. 8. Power spectral densities of process, periodogram and AR estimate. See table II for details. TABLE II Estimated spectra and Normalized Prediction Errors (73) Sxx (ω) Process Periodogram AR(p) Rxx (z) will have two complex conjugate zeros that are both outside the unit circle. Therefore, this autocovariance function cannot be represented by an MA(1) model. The proposed method provides the exact MA(n−1) representation of the periodogram. It can deal with complex valued data and will always provide an invertible model. This representation can be used to make an exact comparison of the periodogram to parametric spectral estimates. VI. Simulation Results To illustrate the methods that are presented in this paper, a simulation experiment is carried out. In order to obtain statistical reliable results, the next procedure is repeated for 10,000 times. • A signal x of 64 observations has been generated by a process that consists of 2 complex sinusoids in complex valued AR(1) noise. • From each signal, an AR(p) model is estimated using the Burg method. The order is selected by means of finite sample order selection criteria as described in [2]. • From each signal, a periodogram are estimated, using a Chebyshev window with sidelobes of −30 dB. The effect of this window can be seen clearly in figure 8. • The Normalized Prediction Error is calculated for • Linestyle solid dotted dash-dot NPE 1 265 3.3 both the AR(p) estimate and the periodogram in order to enable a quantitative comparison. The average of NPE is calculated over all 10,000 repetitions. An example of the power spectral densities of an estimated AR(p) model and a periodogram are given in figure 8, together with the spectrum of the process that generated the data. The solid line is the process, the dotted line is the periodogram and the dash-dotted line the AR estimate. In table II, the average Normalized Prediction Error are given for the process and the estimates. By definition, the process has NPE = 1, the AR estimate gave an average NPE = 3.3, while the windowed periodogram resulted in NPE = 265. It is already known from literature [1] [2], that AR(p) estimates in general provide a better fit to real valued ARMA class processes than the periodogram. This can be explained by the fact that the periodogram is a non-selective transformation of all data, while the parametric methods discriminate between statistically significant information and noise STW/SAFE99 Generalizations of the Normalized Prediction Error by means of order selection. In this simulation experiment, it has been shown that this is also true for processes that consist of sinusoids in complex ARMA noise. For this case too, selection of the right model order is essential for an accurate estimate. It will lead to a considerably lower prediction error and so to a more accurate spectral estimate than when the periodogram is used. VII. Conclusions A derivation is presented that extends the use of the Normalized Prediction Error. This provides a timeand frequency-domain measure for the fit of estimated AR models to the AR process that generated the data. In this paper, the NPE is generalized to cases where the process consist of sinusoids in additive complex valued ARMA noise and the model is an ARMA model or a periodogram. When comparing periodogram estimates of processes, containing sinusoids in complex valued ARMA noise, to AR(p) estimates, the latter turn out to be superior. This can be explained by the application of finite sample order selection. IEEE/ProRISC99 641 References [1] P.M.T. Broersen. The quality of models for arma processes. IEEE Trans. on Signal Process., 46(6):1749–1752, June 1998. [2] P.M.T. Broersen. Robust algorithms for time series models. In Proceedings of ProRISC/IEEE CSSP98, pages 75–82, Nov. 1998. [3] S.M. Kay. Generation of the autocorrelation function of an arma process. IEEE Trans. Acoust., Speech, Signal Proc., ASSP-33(3):733–734, June 1985. [4] S.M. Kay. Modern Spectral Estimation: Theory and Application. Prentice-Hall signal processing series. Prentice-Hall, Englewood Cliffs, NJ, 1988. [5] S.M. Kay and S.L. Marple. Spectrum analysis - a modern perspective. Proceedings of the IEEE, 69(11):1380–1419, Nov. 1981. [6] E. Parzen. Some recent advances in time series modelling. IEEE Transactions on Automatic Control, AC-19:723–730, 1977. [7] M.B. Priestly. Spectral Analysis and Time Series. Probability and Mathematical Statistics. Academic Press, 1981. [8] H.E. Wensink and A.M. Bazen. On stochastic parametric modelling of radar sea clutter for identification purposes. In Proceedings of PSIP ’99, pages 80–85, Jan. 1999. [9] G. Wilson. Factorization of the covariance generating function of a pure moving average process. SIAM Journal Numer. Anal, 6(1):1–7, March 1969. 642 Asker M. Bazen, Cornelis H. Slump C. Description Par2cov.m Appendix I. Matlab Files The following Matlab files are included: NormPredErr.m, Par2cov.m, ARMApar2cov.m and Par2psd.m. These functions provide the tools to evaluate and display the spectral estimates of ARMA models and periodogram. A. Description NormPredErr.m The Matlab file NormPredErr.m calculates the Normalized Prediction Error for ARMA estimates of processes that contains m complex sinusoids in ARMA noise. The function is called by: [NPE] = NormPredErr(ARpar,MApar,ARparEst, MAparEst,Freqs,SNR) The Matlab file Par2cov.m calculates the autocovariance function Rxx (k) of an AR process. The function is called by: [Cov] = Par2cov(ARpar,Ncov,R0) where the same definitions of variables are used as above. D. Description Par2cov.m The Matlab file Par2psd.m calculates the power spectral density function Sxx (ω) of an ARMA process. The function is called by: [Psd,Freqas] = Par2psd(ARpar,MApar,R0,Nfreq) where the following definitions of variables are used: where the following new definitions of variables are used: NPE = NPE h ARpar = MApar = ARparEst = MAparEst = Freqs = h h h h h SNR = 1 a1 · · · ap 1 b1 · · · b q 1 â1 · · · âp 1 b̂1 · · · b̂q f1 · · · fm iT h iT Psd = iT Freqas = h Sxx (−π) · · · Sxx (π) −π · · · π iT iT Nfreq = number of evaluation frequencies iT iT SNR 1 · · · SNR m iT B. Description ARMApar2cov.m The file NormPredErr.m makes use of ARMApar2cov.m. This function calculates the autocovariance function Rxx (k) of an ARMA process. The function is called by: [Cov] = ARMApar2cov(ARpar,MApar,Ncov,R0) where the following new definitions of variables are used: h Cov = Rxx (0) · · · Rxx (Ncov) iT Ncov = number of lags wanted R0 = Rxx (0) STW/SAFE99