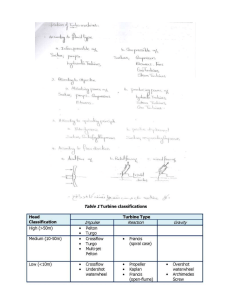
Fluid Machines Dr. Sharad Chaudhary Topics • • • • • Dimensional Analysis and Similititude Hydro Turbines Hydraulic Pumps Cavitations Water Hammer and Surge Tanks Hydraulic Turbines Hydraulic Turbines Impulse Turbines Reaction Turbines Radial flow Axial Flow Mixed Flow Hydraulic Turbines • Momentum Principle r r r r r dmV d = ρVdV + ∫ ρV V .dA ∫ dt dt CV CS ( ) Example: V = 50 m/s, Q= 60 lit/s, find the force on the vane. r r r r r dmV d ρVdV + ∫ ρV V .dA = ∫ dt dt CV CS r r r r ∑ F = 0 + ∫ ρV V .dA ( ( y ) ) CS Control Surface r r r r r r r ∑ F = 0 + ∑ ρV V .dA + ∑ ρV V .dA ( in x ) ( out ) r r r ∑ Fr = ρVinr(Vin dAin cosθin ) + ρVoutr(Vout dAout cosθ out ) ∑ F x = ρVin, x (Vin dAin cosθin ) + ρVout , x (Vout dAout cosθ out ) r r r ∑ F y = ρVin, y (Vin dAin cosθin ) + ρVout , y (Vout dAout cosθ out ) Hydraulic Turbines r r r r r r r ∑ F = 0 + ∑ ρV V .dA + ∑ ρV V .dA ( ) in ( ) out r r r ∑ F = ρVin (Vin dAin cosθin ) + ρVout (Vout dAout cosθ out ) Control Surface Resolving along x and y directions r r r ∑ F x = ρVin, x (Vin dAin cosθin ) + ρVout , x (Vout dAout cosθ out ) ( ( ) ) + 1000.50. cos 60 (50.(1.2.10 )cos 0 ) = 1000.50. 50. 1.2.10 −3 cos180o −3 o r Vin r dAin Aout r Vout y x o = −1500 N r r r ∑ F y = ρVin, y (Vin dAin cosθin ) + ρVout , y (Vout dAout cosθ out ) ( ( ) = 0 + 1000.50. 50. 1.2.103 sin 60o = 2598 N r Fx ,vane r Fy ,vane Force on the vane r = − Fx r = − Fy ) Hydraulic Turbines • If the vane is moving with certain velocity r d r r r r r r r ∑ F = dt ∫ ρ V − u dV + ∫ ρ V − u V − u .dA CV CS r d r r r r ∑ F = dt ∫ ρVr dV + ∫ ρVr Vr .dA CV CS ( ) )(( ( ( ) ) Control Surface ) IF V = 50 m/s, Q= 60 lit/s, u=10 m/s find the force on the vane. r r r r r r r r dmV = ∫ ρVr Vr .dA , or ∑ F = ∫ ρVr Vr .dA dt CS CS ( y ) ( r r r r r r r ∑ F = 0 + ∑ ρVr Vr .dA + ∑ ρVr Vr .dA ( in ) ( ) ) out r r r ∑ Fr = ρVrr,in (Vr ,in dAin cosθin ) + ρVr ,rout (Vr ,out dAout cosθout ) ∑ F x = ρVrx,in (Vr ,in dAin cosθin ) + ρVrx,out (Vr ,out dAout cosθ out ) r r r ∑ F y = ρVry ,in (Vr ,in dAin cosθin ) + ρVry,out (Vr ,out dAout cosθ out ) x r u r Vout r Vr,in r Vout r u r Vr,out r Vr, in Hydraulic Turbines r ∑Fx r ∑Fy r F ∑ x r F ∑ x r r = ρVrx ,in (Vr ,in dAin cos θ in ) + ρVrx ,out (Vr ,out dAout cos θ out ) r r = ρVry ,in (Vr ,in dAin cos θ in ) + ρVry ,out (Vr ,out dAout cos θ out ) ( ( ) ) ) = −960 N r ∑ F y = 0 + 1000.40. 40. 1.2.10−3 sin 60o r ∑ F y = 1662.7 N r r r F = Fx + Fy ( ( y ( ( = 1000.40. 40. 1.2.10 −3 cos180o + 1000.40. cos 60o 40. 1.2.10 −3 cos 0 o ) ) In case of a series/ cascade of vane as in a pelton wheel periphery r r r r r r ∑ F = 0 + ∑ ρVr V .dA + ∑ ρVr V .dA ( in ) ( out ) r r r ∑ Fr = ρVrr,in (Vin dAin cosθin ) + ρVr ,rout (Vout dAout cosθout ) ∑ F x = ρVrx,in (Vin dAin cosθin ) + ρVrx,out (Vout dAout cosθout ) r r r ∑ F y = ρVry,in (Vin dAin cosθin ) + ρVry,out (Vout dAout cosθout ) x ) Pelton Turbines Pelton Turbines Pelton Wheel/runner and Bucket with notch Pelton Turbine Nozzle with water striking the bucket Pelton Turbine Nozzle components Pelton Turbine y x Pelton Turbine Force on the vane r r r r r r − ∑ F = ∑ ρVr V .dA + ∑ ρVr V .dA ( u V2 Vr2 Vr1 V1 θ Ft u r −∑F r −∑F r ∑ Fr ∑ Fr ∑ Fr ∑ Fr t ∑ Ft in ) ( ) out r r o = ρVr ,in Vin dAin cos180 + ρVr ,out Vout dAout cos 0o r r = − ρVr ,in (Vin dAin ) + ρVr ,out (Vout dAout ) r r = ρVr1 (V1dA1 ) − ρVr 2 (V2 dA2 ) r r = ρVr1 (Q ) − ρVr 2 (Q ) r r = ρQ Vr1 − Vr 2 r r y = ρQ Vr1 t − Vr 2 t ( ) ( ( ) [( ) ( ) ] = ρQVrt (1 − cos θ ) P = F .u = ρQuVrt (1 − cos θ ) This is the power developed by the pelton wheel/runner x ) Pelton Turbine u V2 This is the power developed P = F .u Vr2 Vr1 V1 θ = ρ QuV u Ft P V 2 V u rt (1 − cos θ ) This can be maximised by dP =0 du d ρ Qu (V − u )(1 − cos θ ) = 0 du V u = 2 by the Pelton Turbine hf Head Race Casing Penstock Pelton Wheel Ha Nozzle Deflector Spear TailRace Losses up to Nozzle Principle of Reaction Turbine Forces on reducer bent/elbow s we know the general unsteady linear momentum equation applied to a control volume is r r r r r ∂ ∑ F = ∂t ∫ ρ V dVol + ∫ ρ V V .d A cv cs For a steady flow it reduces to r r r r ∑ F = ∫ ρ V V .d A r cs r r r r r r V2 ∑ F = ∫ ρ V V .d A in + ∫ ρ V V .d A out ( ( in y ) ) ( ) ( ) out P1 A1 − P2 A2 cos θ + Fx = ρ Q (V 2 cos θ − V1 ) 0 − P2 A2 sin θ + F y = ρ Q (V 2 sin θ ) V1 P1 x V2 P2 θ Principle of Reaction Turbine A lawn sprinkler with two jets each located at 30 cm from centre. The jets are of 1 cm diameter. Assuming no friction, find the speed of rotation for a discharge of 2.5 L/s. Also find the torque required to hold the sprinkler stationary. Principle of Reaction Turbine Moment of Moment equation we know the general unsteady linear momentum equation applied to a control volume is r r r r r ∂ ρ ρ V V F = dVol V .d A + ∫ ∫ ∂ t cv cs r r r The moment of a force F about a point O is given by r × F r r r r r r r r ∂ ρ r × V dVol + ∫ ρ r × V V .d A r×F = ∂ t cv∫ cs ∂ ρ rV t dVol + ∫ ρ rV t (V n .dA ) Ft r (= T z ) = ∂ t cv∫ cs Which if applied to an annular control volume, in steady flow, is T z = ∫ ρ 2 r2Vt 2V n 2 dA 2 + ∫ ρ 1 r1Vt 1V n1 dA1 ( ) ( A2 r V Vt ) Vt r1 V A2 for complete circular symmetry, where r, ρ , Vt and Vn are constant over the inlet and outlet control surface T z = ρ Q [(rV t )2 − (rV t )1 ] T z = ρ Q [r2V 2 cos α 2 − r1V1 cos α 1 ] T z = ρ Q [r2V w 2 − r1V w1 ] r2 V Vt Principle of Reaction Turbine Vt r1 V r2 V Vt Principle of Reaction Turbine V V Vt Vt Principle of Reaction Turbine V V Vt Vt Principle of Reaction Turbine T z = ρ Q [r2V w 2 − r1V w1 ] P (= T z ω ) = ρ Q [u 2V w 2 − u1V w1 ] Principle of Reaction Turbine Forces on reducer bent/elbow s we know the general unsteady linear momentum equation applied to a control volume is r r r r r ∂ ∑ F = ∂t ∫ ρ V dVol + ∫ ρ V V .d A cv cs ( ) For a steady flow it reduces to r r r r ∑ F = ∫ ρ V V .d A ( ) r r r r r r r ∑ F = ∫ ρ V (V .d A ) + ∫ ρ V (V .d A ) r r r r r r r ∑ F = ∫ ρ V (V .d A ) + ∫ ρ V (V .d A ) cs in in out out in in y V2 out out P1 A1 − P2 A2 cos θ + Fx = ρ Q (V 2 cos θ − V1 ) 0 − P2 A2 sin θ + F y = ρ Q (V 2 sin θ ) V1 P1 x V2 P2 θ Principle of Reaction Turbine Moment of Moment equation we know the general unsteady linear momentum equation applied to a control volume is r r r r r ∂ ρ V dVol + ∫ ρ V V .d A F = ∫ ∂ t cv cs r r r The moment of a force F about a point O is given by r × F r r r r r r r r ∂ ρ r × V dVol + ∫ ρ r × V V .d A r×F = ∂ t cv∫ cs ( ) ( Ft r (= T z ) = ∂ ∂t ∫ ρ rV dVol + ∫ ρ rV (V t t cv ∫ρ A2 r Vt 2V n 2 dA 2 + 2 2 V Vt ) n .dA ) Vt cs Which if applied to an annular control volume, in steady flow, is Tz = r ∫ ρ rV V 1 1 t1 n1 dA1 A2 for complete circular symmetry, where r, ρ , Vt and Vn are constant over the inlet and outlet control surface T z = ρ Q [(rV t )2 − (rV t )1 ] r1 V r2 V Vt Inward-flow Runner Vt r1 V r2 V Vt Spiral Casing Guide vanes Mixed-flow Runner Velocity triangles Reaction Turbine installation Plan V V Vt Vt Control volume & Velocity triangles V V Vt Vt Euler equation for turbomachinery T z = ρ Q [r2V w 2 − r1V w1 ] P (= T z ω ) = ρ Q [u 2V w 2 − u1V w1 ] Layout of Hydel power plant Layout of Hydel power plant Governing of Turbines Dr. Sharad Chaudhary Guide vanes Reaction Turbine Governing Mechanism Governing Mechanism Governing Mechanism Pumps Dr. Sharad Chaudhary Hydraulic Pumps Centrifugal Pumps: Classification BASIS TYPES Head Low (H< 15m) Medium (15<H<40m) High (H>40m) Casing Volute/scroll Guide vanes Whirl chamber Flow direction Radial flow Mixed flow Axial flow Impeller Closed Semi open open Inlets Single Double Shaft position Horizontal Vertical Stages Single Multistage Principle of Rotodynamic pumps Moment of Moment equation we know the general unsteady linear momentum equation applied to a control volume is r r r r r ∂ ρ V dVol + ∫ ρ V V .d A F = ∫ ∂ t cv cs r r r The moment of a force F about a point O is given by r × F r r r r r r r r ∂ ρ r × V dVol + ∫ ρ r × V V .d A r×F = ∂ t cv∫ cs ( ) ( Ft r (= T z ) = ∂ ∂t ∫ρ A2 Vt ∫ ρ rV t dVol + ∫ ρ rV t (V n .dA ) cv r Vt 2V n 2 dA 2 + 2 2 V ) V Vt cs Which if applied to an annular control volume, in steady flow, is Tz = r ∫ ρ rV V 1 1 t1 n1 dA1 A2 for complete circular symmetry, where r, ρ , Vt and Vn are constant over the inlet and outlet control surface T z = ρ Q [(rV t )2 − (rV t )1 ] r2 r1 Vt V A Rotodynamic Pump System Principle of Rotodynamic pumps Velocity Triangle T z = ρ Q [(rV t )2 − (rV t )1 ] P = ρ Q ω [(rV t )2 − (rV t )1 ] In terms of whirl components P = ρ Q [u 2V w 2 − u1V w1 ] In terms of Head [u V − u1V w1 ] H = 2 w2 g 2 V 2 − V12 u 22 − u12 V r22 − V r21 + + H = 2g 2g 2g When the whirl component at inlet is zero uV H = 2 w2 g However th e actual head produced will be less by Losses, H L H actual = H − H L V 22 V12 P2 P1 + + z 2 − + + z1 − H L H actual = 2 g ρ g 2 g ρ g ( ) ( ) ( ) Heads in Pump Manometric head (H) = Static head (H s ) + Losses Therefore, H = H s + hi + h fs + h fd + he Manometric Efficiency (η m ) = gH ρ QgH , Overall Efficiency (η m ) = u 2V w 2 P Losses in Pumps Staging of Pumps Staging of Pumps Performance of a Pump DIMENSIONAL ANALYSES AND SIMILITUDE Dr. Sharad Chaudhary Why Dimension Analyses? Understand Units and Dimensions of Various Physical Quantity Unit Conversions Dimensional principles Reasoning by various Method of analysis in Fluid Mechanics and Heat Transfer Modelling and Similitute Units and Dimensions •Dimensions: Certain properties of the system that describe the physical phenomenon and are fundamental and universal •Units: •Fundamental and Derived Dimensions / Units • Dimensions of a Derivative/Integral are easily obtained by the dimensions of variables to be differentiated/Integrated and variable with respect to which it is differentiated/integrated Units and Dimensions S.No Physical Quantity Dimensions SI Units 0 0 1 Mass ML T Kg 2 Length 3 Time 4 5 6 7 8 9 10 0 M LT 0 0 0 M L T m sec Dimensional Analysis Methods • Indicial Method (Raleigh’s Method) • Group Method – Reasoning Method – Method of Repeating variables (Buckingham π) – Matrix Method Indicial (Raleigh’s) Method Steps in Indicial (Raleigh’s) Method 1.Identify of the variables involved in the process 2.Figure out the dependent and independent variables. 3.Relationship determining the dependence of dependent variable on the other is to be found D = f ( I1 , I 2 , I 3 , I 4 .......I N ) 4. It could be expressed simple equation by putting arbitrary indices on the independent a b c variable, of the form D = C.I1 .I 2 .I 3 Indicial (Raleigh’s) Method • By using the principle of dimensional homogeneity the values of these arbitrary indices is determined • Having known the indices then, the numerical coefficients are determined experimentally with known values of all the variables involved Sample Problem The thrust, F, of a propeller depends upon its diameter, d, speed of advance, v, rev/sec, N, the fluid density, ρ and the fluid viscosity, μ. Find an expression for F . Advantages and Limitations • The method is very simple • Very useful in determination of the functional relationship when the no. of variables are less • Exact functional relation between the variables could be determined Advantages and Limitations • The method is not much of use when the no. of variables involved are many • Not very convenient in modelling and similitude studies • Some functional relationships are better expressed by groups of variables rather than variable individually. It fails to directly form such dimensionless groups Group (Buckingham π )Method 1. Select the pertinent variables 2. Write the functional relationship e.g F (V , D, ρ , µ , c, H ) = 0 3. Select the repeating variables (Do not make the dependent variable a repeating variable). These variables should contain all the m dimensions of the problem. Often variable is chosen to specify scale, another kinematics and third Dynamics. Group (Buckingham π )Method 4. Write the π parameters in terms of unknown exponents, e.g Π1 = V x1 D y1 ρ z1µ −1 x1 y1 −3 = LT L ML ( ) ( ) z1 −1 ML T −1 5. For each of such π expressions write the equations of the exponents, so that the sum of each exponents of each dimension is zero. 6. Solve the equations simultaneously Group (Buckingham π )Method 7. Substitute back into the π expressions of step 4 the exponents to obtain the dimensionless π parameters 8. Establish a functional relationship f (Π1 , Π 2 , Π 3 .....Π n − m ) = 0 or , Π1 , the dimensionless group containing the dependent variable Π1 = f (Π 2 , Π 3 .....Π n − m ) 9. Recombine to alter the forms of the π parameters, keeping the same no. of Sample Problem A fluid-flow situation depends upon the velocity V, the density ρ, several linear dimensions l,l1,l2 , pressure drop ΔP, gravity g, viscosity μ, surface tension σ and Bulk Modulus of Elasticity K. Apply dimensional analysis to these variables to find a set of Π parameters Matrix Method 1. Figure out all the variables involved 2. Write them in one row starting with repeating variable followed by non repeating ones 3. Form a matrix with the each row corresponding to every dimension involved (For kinematics No of rows=2, for Dynamics = 3, for Thermodynamics =4 ) 4. Determine the rank of the matrix; r; 5. The no. of dimensionless parameters will be (n-r) Matrix Method 6. Write homogeneous linear algebraic equations whose coefficients are the elements in the rows of matrix. 7. Solve them assigning arbitrary values to (n-r) variables. Similitude Designers require to simulate certain flow situations by means of scaled down models. Such studies are known as similitude or model studies. Two approaches as practiced (1) All forces on model and prototype should be in the same ratio i.e. the force polygons should be similar. Dominant force should be known beforehand (2) Dimensionless group containing different force terms should be similar Similitude Rules of similarity state that there should be two kinds of similarity in model and prototype 1. Geometric Similarity 2. Dynamic Similarity (Similarity of velocity and force polygons) Example 2 ∆p v v ρvl ρv = f , , , , 1 2 µ σ K lg ρv ρ 2 Reynold’s No. Pressure Coefficient Weber No. Mach No. C p = f (Re, Ma,We, Fr ) Froude No. Example A fluid-flow situation depends upon the velocity V, the density ρ, several linear dimensions l,l1,l2 , pressure drop ΔP, gravity g, viscosity μ, surface tension σ and Bulk Modulus of Elasticity K. Apply dimensional analysis to these variables to find a set of Π parameters ρvl ∆p v ρv 2 v = f , , , , 1 2 µ σ K lg ρv ρ 2 Different Flow Situations The following flow situations are common in engineering application of fluid mechanics 1. Pipe Flow 2. Open Channel Flow (channel transitions, Notches and weirs) 3. Aerofoil Theory including fan, pump and turbine blades 4. Flow through open hydraulic structures (Free surface flows over spillways, stilling basins etc) Different Flow Situations 5. Compressible flows; Wave propagations 6. Discharge under very small heads 7. Flows with gas-liquid and Liquid-liquid interfaces, wavelets etc. One or the other forces like pressure, viscosity, surface tension, Elastic force due to compressibility and gravity force predominate any flow situation and hence the dimensionless no representing that force is chosen to be kept equal in model and prototype. Different Flow Situations The following Modelling laws are applicable based on the flow situations 1.Pipe Flow 2.Open Channel Flow (channel transitions, Notches and weirs) 3.Aerofoil Theory including fan, pump and turbine blades (Re )m = (Re ) p , Reynold's Law Different Flow Situations 4. Flow through open hydraulic structures (Free surface flows over spillways, stilling basins etc) (Fr )m = (Fr ) p , Froude' s Law 5. Compressible flows; Wave propagations (Ma )m = (Ma ) p , Mach ' s Law Different Flow Situations 4. Discharge under very small heads 5. Flows with gas-liquid and Liquid-liquid interfaces, wavelets etc (We)m = (We) p , Weber ' s Law Scale Ratios A scale ratio is defined as the ratio of value of any flow quantity like velocity, acceleration time, discharge pressure etc in a model to that in a prototype. The scale ratios depend upon the model law that is being applied. Scale Ratios Scale Ratio Reynold's law Froude's Law Mach Law Lr Lr Length, Lr Lr Velocity, Vr μ r/ρ rLr Time Discharge Force Pressure Power Examples A submarine-launched missile, 2 m in diameter and 10 m long, is to be tested in a water tunnel to determine the forces acting on it during its underwater launch. The maximum speed during this initial part of the missile’s flight is 10 ms-1. Determine the mean water tunnel flow velocity if a 1/20 scale model is employed and dynamic similarity achieved Examples An airship of 6 m diameter and 30 m length is to be studied in a wind tunnel. The airship speed to be investigated is at the docking end of its range, a maximum of 3 ms-1 Determine the mean model wind tunnel air flow velocity if the model is made to a 1/30 scale. Rotodynamic Machines The fluid quantities involved in all hydraulic machines are the flow rate, Q, the head, H, whereas the mechanical quantities associated with the machines itself are the power, P, speed N, Size, D and Efficiency η PERFORMANCE OF ROTODYNAMIC MACHINES Dr. Sharad Chaudhary Variables in Rotodynamic Machines The fluid quantities involved in all hydraulic machines are The flow rate, Q and Head, H Associated mechanical quantities are The power, P, Speed N, Size, D and Efficiency η Performance Characteristics H vs Q @ N(For Pumps), P vs Q, η vs Q P vs N @ H (For Turbines), Q vs N, η vs N Variables in Rotodynamic Machines Variables in Rotodynamic Machines Variables in Rotodynamic Machines Dimensionless Coefficients For Pumps the output or dependent variable is H, or (gH) while other (independent) variables involved are The flow rate, Q, power, P, speed N, Size, D, fluid density, ρ, Absolute viscosity, μ, Bulk Modulus of Elasticity, K and absolute roughness of flow passage, ε. Dimensionless Coefficients For pumps the relationship could be expressed as gH = f (Q, N , D, ρ , µ , K , ε ) which after the formation of dimesionless group with N, D, and ρ as repeating variables becomes Q µ ε gH K = f , , 2 2 , 2 2 3 2 N D ND ND ρ N D ρ D or ε K H = f K Q , Re, Ma, D Dimensionless Coefficients For turbines the output or dependent variable is Power Output, P while other (independent) variables involved are The flow rate, Q, speed N, Size, D, fluid density, ρ, Absolute viscosity, μ, Bulk Modulus of Elasticity, K and absolute roughness of flow passage, ε. Dimensionless Coefficients For turbines the relationship will be expressed as P = f (Q, N , D, ρ , µ , K , ε ) which after the formation of dimesionless group with N, D, and ρ as repeating variables becomes Q P K µ ε = f , , 2 2 , 3 5 3 2 ρN D ND ND ρ N D ρ D or ε K P = f K Q , Re, Ma, D Dimensionless Coefficients A plot of Head, H vs Discharge, Q forms the fundamental performance curves for a pump, but plot of KH vs KQ represents the performance of the homologous pumps (Pumps of the same design but of the different sizes i.e geometrically similar) Similarity laws can then be applied to evaluate the performance of a given pump Similarity Laws for Pumps Similarity laws are applied to evaluate the performance of a given pump if the performance of a geometrically similar pump is given. Q KQ = is a constant for geometrically similar pump, 3 ND Q1 Q2 = , 3 3 N1 D1 N 2 D2 gH1 gH 2 P1 P1 Similarily, K H = 2 2 = 2 2 , K p = = 3 5 3 5 N1 D1 N 2 D2 ρN1 D1 ρN 2 D2 Specific Speed Similar pumps may compared by using the similarity laws but when pumps of different family need to be compared the plots of these dimensionless parameters are only indicative of relative performance. To compare the performance of such machines a ratio of two important parameters is compared. Such a ratio is known as Type Number (ns) or Specific Speed Specific Speed Type Number (ns) or Specific Speed of the pump is defined as ratio of KQ and KH 1 ns = KQ 2 =N 3 Q 1 2 3 (gH ) 4 K H4 Type Number (ns) or Specific Speed (Ns) of the Turbine is defined as ratio of Kp and KH 1 ns = KP 5 KH 2 P =N 4 ρ 1 2 1 2 3 (gH ) 4 Specific Speed Unit Quantities The Quantities when working under a unit head are termed as Unit Quantities. These are Unit Speed, Unit Discharge and Unit Power. N Q P Nu = , Qu = , Pu = 3 H H H 2 THEORY OF DRAFT TUBE Dr. Sharad Chaudhary Draft Tube Role of Draft Tube • A Draft Tube discharges water from the turbine exit to the tail race • Enables the pressure at turbine exit to be sub atmospheric thereby providing higher degree of reaction for a reaction turbine • Converts Kinetic energy of the water at turbine exit useful pressure energy • Increasing the output and improving the overall efficiency • Facilitates the easy maintenance of turbine Types of Draft Tubes Conical Simple Elbow Bell Mouthed Elbow with circular inlet and rect outlet Theory P1 V12 P2 V22 + + (H s + x ) = + + 0 + hl ρg 2 g ρg 2 g At section 2 : Pressure P2 = Patm + ρgx ( Patm + ρgx ) V22 P1 V12 + + (H s + x ) = + + hl ρg 2 g ρg 2g V12 V22 P1 Patm = − H s − − − hl ρg ρg 2g 2g Efficiency of Draft tube V12 V22 − − hl 2g 2g η= V12 2g Sample Problem CAVITATIONS Dr. Sharad Chaudhary Definition • A phenomenon which consists, basically, of local vaporisation of liquid when the absolute pressure falls to a value equal to /lower than the vapour pressure of the liquid at a given temperature. Mechanism It takes place in following steps 1.Inception: Due to microscopic gas nulei present in solid pores as pressure approaches the vapour pressure 2.Bubbles formation: The nuclei transform into bubbles as the pressure further decreases 3.Pressure wavelets : Generation of pressure wavelets resulting in successive formation of more bubbles. 4.Collapse: As these bubbles move to area of higher pressure they collapse an new bubbles form with each cycle lasting a few millisecs. In Hydraulic Machines/flows It occurs in all hydraulic machines ,must be avoided 1.Pumps: At suction eye 2.Turbines: At the trailing edge of turbines 3.Draft tubes: Inlet 4.Aerofoils: trailing edge 5.Veturimeters: Throat 6.Syphons: Minimum head point Measure The most general and most useful cavitation parameter is ‘Cavitation Coefficient’ ( p1 − p c ) σ = , p1 , p c and V are Upstream, 2 ρV 2 critical pressures and mean upstream velocity The value of σ where inception occurs is σ crit Cavitations in Pumps Cavitations in Pumps If the abs pressure at pump eye is pi v2 pi = patm − ρgH s , where H s = Z s + hs + 2g If vapour pressure is pvap , then cavitation starts when pi = pvap pi − pvap If the difference, ( pi − pvap ), expressed in head, , it ρg measures the positive head available before the cavitation starts. Hence called Net Positive Suction Head (NPSH) pi − pvap patm pvap NPSH = = − Hs − ρg ρg ρg Cavitations in Pumps If the pumps has to produce a total head H, the Suction Head should be not more that NPSH Thoma suggested that NPSH is propotional to pump total head H Thoma' s Cavitation Factor is defined as NPSH σ th = H Another parameter that measures cavitation is Suction Specific Speed ωQ1/ 2 Ks = gNPSH Relation between parameter If the pumps has to produce a total head H, the Suction Head should be not more that NPSH Toma suggested that NPSH is propotional to pump total head H Toma' s Cavitation Factor is defined as ωQ1/ 2 ω s ( gH )3 / 4 NPSH 3 / 4 3/ 4 = = = σ th 1/ 2 3/ 4 ωQ Ks H gNPSH Cavitations in Turbines Thoma cavitation coefficient H atm − Z − hvap σ th = H Another parameter that measures cavitation is Suction Specific Speed a Ks = , the constant a, 4.5 ≤ a ≤ 5.8 ωs Effects The following are the effects of cavitation 1. Performance failure 2. Erosion 3. Vibration Dr. Sharad Chaudhary PRESSURE TRANSIENTS Unsteady Flows Unsteady Flows are of three types 1. Quasi-steady Flows (Fluid Acceleration is negligible e;g Continuous filling/emptying of reservoirs etc) 2. Mass Oscillations (Fluid Acceleration is present but compressibility effects are absent e.g reciprocating pumps) 3. Pressure transient flows (aka Water Hammer e.g rapid closure of valve, pump shut down or turbine load rejection) Pressure transient flows In Pressure transient flows the transient propogation takes place at appropriate acoustic velocity c. c dependents on • Fluid properties • Cross-section dimensions • Elasticity of the fluid (K) • The rate of change flow conditions. Pressure transient flows The wave is reflected through the entire conduit system and results in further surge in pressure. It is controlled by various devices like air-chambers, surge shafts, air ∆P chambers, relief valves and specified closure rates. The ∆P = ρcrise ∆V pressure ∆V c is the wave speed, the change in fluid velocity. Pressure transient flows Speed c is not constant, depends on • Fluid’s bulk modulus of elasticity (more compressible the fluid, lesser is the speed) • Conduit material’s Young’s modulus of Elasticity (more elastic the conduit, lesser the speed). It determines the time required by the wave to traverse the system boundary (L) and travel back. Thus, 2L/c is the pipe period. The slow valve closure takes longer time than one pipe period, while the wave cycle time is 4L/c Pressure transient flows Pressure transient flows Pressure transient flows Rigid Column Theory Consider a flow of liquid of density, ρ and bulk modulus,K f f along a pipe of diameter d and wall thickness e, where the young modulus of the pipe material is E and the ν possion’s ratio is . ρThe mean density of the fluid mixture with y proportion of gas by volume, is ρ = yρ g + (1 − y )ρ g By definition bulk modulus of fluid and gas Vf dV f = − K f Vt = π 4 V dp, dVg = − g dp, Vg + V f = Vt K g d 2l , where l is the length of pipe element chosen Rigid Column Theory δd , then the volume distortion Let the radial distortion be δd dV = π d due to passage of pressure wave dp, l HOW? p 2 Longitudinal and circumferential stresses, if e is pipe d d FL = dp, FC = dp thickness 4e 2e δl (FL −νFC ) δd (FC −νFL ) The strains are =corresponding = and l E d E ν (FC −νFL ) ratio of pipe material, Thus Where dV p = πd 2lis Poisson’s 2E Rigid Column Theory The final form of volumetric strain will depend on the pipe restraint. Three cases are common 1. Pipe restrained axially and circumferentially, both dV p d ν = 1 − dp stresses occur V Ee 2 2. Pipe restrained axially only dV p V = d 1 −ν 2 dp Ee ( ) 3. Pipe may expand along its length, dV p V = d dp Ee dV p So the general expression for pipe distortionV is= d C ′dp Ee Rigid Column Theory Total change in the volume of the fluid, gas and pipe dVt = dV pis− dV f − dVg section d V f Vg = C ′dp + + dp K f K g Ee d ( 1− y) y = C ′dp + + Vt dp Kf K g Ee The overall effective bulk modulus for pipe, fluid and d ( 1 − y ) is y gas combination K = C′ + + −1 eff Ee Kf K g Rigid Column Theory Expression for the wave speed may be deduced as c= K eff ρ d ( 1− y) y = C′ + + Ee K K f g −1 [yρ + (1 − y )ρ ] −1 g g In the absence of free gas wave speed c= K dK f C ′ 1 + Ee ρ Rigid Column Theory Surge Control The pressure surge can be controlled by 1. Valve Closure control 2. Increasing pump inertia 3. Surge Shaft/ air vessels 4. Air/ fluid admission valves 5. Relief valves 6. Bypass systems Valve Closure Control v Typical valve charateristicτ = v0 ∆p0 ∆p Water hammer/ positive pressure surge will propagate through the system as the valve is closed. It is reduced by 1. Two speed valve closure τ = f (θ ), while θ = φ (t ) •Last 15% closing taking more time than first 85%. Valve Closure Control 2. By-pass valve 3. Air-chamber (Useful in positive and negetive pressure surges) Surge Tanks Surge Tanks Rigid column theory is applied to surge tank applications Consider a pipeline, of area ‘a’ conveying water at velocity V. The surge tank is located at distance ‘L’ from reservoir. The tank cross section is A, A/a>>1. Under steady state frictionless flow level in the surge tank shall be same as that at reservoir. aV =flow Q1 +rate Q Q into the tank due to transient changes The 1 Differentiation yields thedVwater level in the tank, dz dQ dQ a dt = 1 dt + dt Surge Tanks aV = Q1 + Q Differentiation yields dV dQ1 d 2z a ≈ =A 2 dt dt dt The fluid massρ(aL ) is accelerated/decelerated which is ρgz opposed by rise ‘z’ in surge tank resulting in pressure at the surge tank end of the pipe. Hence equilibrium of dV forces ρgza = m dt dV ρgza = ρaL dt dV g = z dt L Surge Tanks dV g = z dt L dV Substituting dt d 2 z ag + z=0 2 dt AL Solution yields ag ag z = C1 sin t + C2 cos t, AL AL z is measured from steady water level in tank, z = 0, at t = 0 ⇒ C 2 = 0 ag dz z = C1 sin t , C1 is determined by codition of full closure, A = Q0 AL dt t =0 Surge Tanks dV g = z dt L dV Substituting dt d 2 z ag z=0 + 2 dt AL Solution yields ag ag z = C1 sin t + C2 cos t, AL AL z is measured from steady water level in tank, z = 0, at t = 0 ⇒ C 2 = 0 ag dz z = C1 sin t , C1 is determined by codition of full closure, A = Q0 AL dt t =0 AL Q0 ag AL z= t and time period of oscillations, T = 2π sin ag A AL ag Surge Tanks Surge Tanks: Types Thank you