A NOISE AND DISTORTION COMPARISON OF ANALOGUE ACTIVE FILTERS
K. A. Mezher1, P. Bowron2 and A. A. Muhieddine3
1
Etisalat College of Engineering, P.O. Box 980,Sharjah, United Arab Emirates, kamezher@ece.ac.ae
2
Department of Electronics and Electrical Engineering, University of Bradford, Bradford, West
Yorkshire, BD7 1DP, United Kingdom, p.bowron@bradford.ac.uk
3
Electronics Technical Department, Junior Technical College, Abha, Saudi Arabia
ABSTRACT
The dynamic-range performances of various
active-RC filter configurations are compared for a
common second-order bandpass specification by means
of noise and nonlinear analysis. Conclusions are drawn
regarding optimal choice of circuit to maximize signalhandling capability.
1. INTRODUCTION
Active filters often have to operate over a wide
range of signal levels. This necessitates that they are
designed for low noise levels and for processing large
signals without undue distortion. In order to optimize the
design, it is necessary to predict the dynamic range
theoretically. A block-diagram approach is adopted to
model the noise performance and to facilitate nonlinear
analysis of the saturation characteristics in the active
devices. In this paper, attention is confined to filter
circuits employing voltage operational amplifiers. A
fairly comprehensive comparison is made of most well
known active-filter topologies for a common secondorder bandpass design with center frequency = 19.5KHz,
selectivity = 5 and passband gain = 2. Both singleamplifier
and
multiple-amplifier
active-RC
configurations are considered and optimization carried
out in some cases. The circuits considered are [1-7]:
(1) Single-amplifier modified multiple negative
feedback (MMNFB).
(2) Composite two-amplifier (COA2).
(3) Two-amplifier GIC-derived (GICD2).
(4) Three-amplifier GIC-derived (GICD3).
(5) Tow-Thomas ring of three (TTB).
(6) Modified Tow-Thomas ring of three (MTTB).
(7) Akeberg-Mossberg (AM).
(8) Sedra-Brown (SB)
(9) Inverting-input state variable (ISV).
(10) Non-inverting-input state variable (NISV).
2. NOISE ANALYSIS
Noise sources in voltage operational amplifiers
have various physical origins and are assumed to be
uncorrelated [8]. Passive noise emanates mainly from
thermal effect in resistors and can be aggregated into a
single voltage-spectral-density source given by
Enp2 = 4kT Re{1/y22(s)}
(1)
Where k is Boltzmann’s constant, T is absolute
temperature and y22(s) is the short-circuit driving-point
admittance of a passive network section. The overall
squared noise-voltage spectral density is given by
En2 = Ena2 + Enp2 + Ina2 y222
(2)
In which Ena is the active noise voltage contribution and
Ina the active noise current contribution (Which is
customarily [8] neglected).
By applying unidirectional referral [8] in the
generalized Ra = Za, Rb = Zb case ( as illustrated in
Figure 1), the noise source at the stage input is
E′n2 = 1 + Za/Zb2 En2
(3)
Zb
En`
Za
En
A
+
Figure 1. Unidirectional referral of noise sources in basic
negative-feedback section.
Hence, the squared output noise spectral density is
Eno2 = 1 + Zb/Za2 En2
(4)
Integrating equation (4) over the frequency band, the
squared total output noise voltage (Vno2) can be
achieved.
The above technique was extended [8] to
multiple-amplifier filter circuits. Therefore, an
expression for all second-order filters with identical
amplifiers can be expressed in the general form [9]
Vno2 = ωoQ [ a(Q,Ko) Ena2 + b(Q, Ko) Enr2]
(5)
2
2
E no
(ω o ) = ( A + B).Q 2
For all second-order networks, the squared
output noise spectral density is in the form
ω
(ω − ω ) + jω o
Q
2
o
ω o E no2 (ω o )
4
Q
(14)
Where Eno(ωo) is the measured output noise spectral
density at the center frequency.
(6)
3. DISTORTION ANALYSIS
Where A and B are frequency-independent variables
dependent on the circuit. TLP(jω), TBP(jω) are the
normalized lowpass and bandpass transfer functions,
being given by
ω o2
(13)
Substituting equation (13) into equation (11) gives
2.1. Noise Measurement
TLP ( jω ) =
(12)
Therefore, equation (6) can be rewritten for ω=ωo as
Vno2 =
Eno2(ω) =A TLP(jω)2 + B TBP(jω)2
2
TLP ( jω ) = TBP ( jω ) = Q 2
Where a(Q,Ko) and b(Q,Ko) are functions of selectivity
Q and passband gain Ko, while Enr2 = 4kTR, where R is
the resistance level. Noise performance can then be
optimized and compared as shown in Table 1. All noisemeasured values are taken by using the HP3585A
spectrum analyzer. It measures the output noise spectral
density in volts/√Hz. Therefore, it is necessary to
develop an approximate transformation in order to
record output noise measurements in volts rms.
The upper signal level is determined by the
acceptable amount of output harmonic distortion [6].
These harmonics are generated by nonlinearities in the
circuit, principally by the input saturation characteristics
of practical operational amplifiers. These can be
modeled [9] by
Vn(t) = Va f[Ve(t)]
(15)
(7)
2
and
TBP ( jω ) =
jωω o
(ω o2 − ω 2 ) + jω
ωo
Q
Where Vn(t) and Ve(t) are the instantaneous output and
input-error voltages of the nonlinearity, respectively. In
the case of bipolar device [9] Va = ρ/ωt and
(8)
f[Ve(t)] = tanh [(ωt/ρ)Ve(t)]
Since , the squared total output noise voltage is given by
[10]
Vno2 =
1
2π
ω2
2
∫ Eno (ω )d (ω ) ≅
ω1
Where ωt is the gain-bandwidth product and ρ is the
slew rate. In FET technology, f[Ve(t)] is a biquadratic
function [12].
Output distortion must be minimized by
appropriately choosing the feedforward transfer function
Tf(s) and feedback transfer function Tb(s) of the filter
system [9]. These transfer function blocks are shown in
Figure 2 for the general three-amplifier filters. General
single-amplifier and two-amplifier block diagrams can
be easily generated from Figure 2. For a single-amplifier
section, the ideal voltage transfer function is given by
∞
1
2
(ω )d (ω ) (9)
E no
2π ∫0
and the integral of lowpass and bandpass transfer
functions is given by [10],[11]
2
∞
∫T
LP
0
∞
2
d (ω ) ≅ ∫ TBP d (ω ) =
0
π
ω oQ
2
(10)
T ( s)
Vo
(s) = − f
Vi
Tb ( s )
Therefore, integrating equation (6) will give the squared
output noise as
Vno2 =
ω oQ
ω E (ω o )
( A + B) = o
4
4
Q
2
no
(16)
(17)
This suggest that Tb(jω) should be maximized by
increasing overall negative feedback. Consequently,
1/Tb(jω) can be used as a yardstick of distortion
performance.
Distortion assessment of most three-amplifier
filter circuits must be carried out in terms of their
constituent single-amplifier sections. Sections such as
the noninverting integrator and all pass circuit, because
of their frequency-independent negative feedback,
(11)
At the center frequency (i.e. ω=ωo), equations (7) and
(8) can be simplified to
2
resemble the inverter regarding distortion. In the TowThomas circuit, the position of the lossless integrator
influences the output distortion. The presence of two
pure integrators with two feedback loops in the statevariable (SV) circuit suggests the lower distortion
evident in Table 1.
Tb13
Tb31
+
Vi
Tb23
∑ +
Tb12
+
+
∑
Tfi1
+
+
∑
Tb21 +
+
A1
Vo1
Tb11
∑ +
+
A2
Tb22
+
+
∑
Tb32
+
Vo2
A3
Vo3
∑ + Tb33
+
Tfi2
Tfi3
Figure 2. Signal block-diagram representation of general three-amplifier filters
NOMMNFB
OMMNFB
COA2
NISV
Circuit
Output
Noise
(µV)
(NISV)
(COA2)
(TTB)
(SB)
Optimized
(MMNFB)
(GICD2)
(GICD3)
Non-Optimized
(MMNFB)
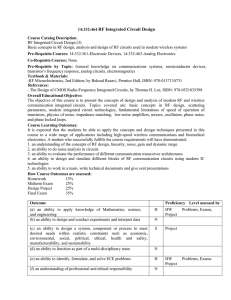
10
THD %
1
0.1
0.01
0.001
0.0001
0.1
0.7
1.5
2.5
Input Voltage (V)
Figure 3. Comparison of harmonic distortion for secondorder bandpass filters.
Dynamic
Range
25.45
36.55
25.90
25.45
36.55
Output
Voltage
(0.05%
THD)
2.734
2.720
1.850
1.520
1.630
44.44
43.6
70.42
1.260
1.04
1.260
89.0 dB
87.6 dB
85.0 dB
100.6 dB
97.4 dB
97.1 dB
95.5 dB
93.0 dB
Table 1. Merit order of signal-handling capabilities for
2nd-order pandpass filters designed with fo =
19.5 kHz , Q = 5 , K0 = 2 , R = 8 kΩ for
µA741 Op. amplifiers.
4. CONCLUSIONS
The investigation has revealed that lowersensitivity circuits often display higher noise and
distortion. Also, the output noise may appear to increase
with the number of amplifiers, it actually depends more
on the nature of the noise transfer functions. This is
evident in Table 1, where optimized COAF and SAF
circuits have identical noise levels.
Optimization of the single-amplifier filter
design affords a significant improvement in
performance. This is likely to be the case also for the
multiple-amplifier circuits. Dynamic range can improve
as the number of amplifiers is increased. This is
particularly the case for the three-amplifier state-variable
circuit. Up to 0.05% total harmonic distortion (THD),
the non-inverting-input state-variable circuit offers the
best signal handling as shown in Table 1 and Figure 3.
Above this, the composite-amplifier circuit and then the
single-amplifier circuit appear to offer higher signal
levels, though the quality of the output signal waveform
will then be degraded. Output harmonics above the third
are significant only for state-variable circuits at large
excitations. In multiple-amplifier universal-type filters,
the bandpass output can be limited by the output signals
of other stages.
Although most of the circuits considered have
been long established, many of the results and design
recommendations are new. Furthermore, the analytical
techniques employed are also applicable to continuostime MOSFET-C and OTA-C arrangements. The results
have significance for switched-capacitor filters since
these are often realized in similar configurations while
suffering greater inherent noise and distortion.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
5. REFERENCES
1.
2.
3.
4.
5.
View publication stats
L. C. Thomas: “The biquad: part I – some
practical design considerations”, IEEE Trans.
Circuit Theory, Vol. CT-18, No. 3, pp. 350-361,
May 1971
A. M. Davis: “Predistortion design of active filters
to compensate for finite gain bandwidth”, Int. Jnl.
Electronics, Vol. 80, No. 1, pp. 15-30, Jan. 1981.
A. S. S. Al-Kabbani and P. Brown:
“The
behaviour of actively compensated bandpass filters
at higher signal levels”, El Letters, Vol. 23, No. 21,
pp. 1108-1109, Oct. 1987.
P. E. Allen, R. K. Calvin and C. G. Kwok:
“Frequency-domain analysis for operationalamplifier macromodels”, IEEE Trans., Vol. CAS26, No. 9, pp. 693-699, Sept. 1979.
E. A. Faulkner and J. B. Grimbleby: “The effect of
amplifier gain-bandwidth product on the
performance of active filters”, IERE Radio and
Electronic Engineer, Vol. 43, No. 9, pp. 547-551,
Sept. 1973.
16.
P. Bowron and A. A. Muhieddine: “Active filters
with reduced harmonic distortion”, IEE
Colloquium on Digital and Analogue Filters, pp.
9/1-9/5, London, 25 May 1990.
A. Budak and D. M. Petrela:
“Frequency
limitation of active filters using operationalamplifiers”. IEEE Trans. Circuit Theory, Vol. CT19, No. 4, pp. 322-328, July 1972.
P. Bowron and K. A. Mezher: “Noise analysis of
second-order analogue active filters”, IEE Proc.
Circuits Devices Syst., Vol. 141, No. 5, pp. 350356, October 1994.
P. Bowron, K. A. Mezher and A. A. Muhieddine:
“The dynamic range of second-order continuoustime active filters, IEEE Trans. Circuits Syst. I,
Vol.43, No. 5, pp. 370-373, May 1996.
F.N. Trofimenkoff, D.H. Treleaven and L.T.
Burton, “Noise performance of RC-active quadratic
filter sections”, IEEE Trans. Circuit Theory, vol.
CT-20, no. 5, pp. 524-532, Sept. 1973.
H.J. Bächler and W. Guggenbühl, “Noise analysis
and comparison of second-order networks
containing a single amplifier”, IEEE Trans.
Circuits and Systems, vol. CAS-27, no. 2, pp. 8591, Feb. 1980.
P. Bowron and M. A. Mohamed: “Nonlinear
modelling of FET-input operational amplifiers”,
Electronic Letters, Vol. 15, No. 15, pp. 473-474, 19
July 1979.
A. S. Sedra and P. O. Brackett: “Filter Theory and
Design: Active and Passive”, Chapter 9, pp. 559571, Matrix, 1978.
W. J. Cunningham: “Introduction to Nonlinear
Analysis”, McGraw-Hill, New York, 1958.
L. P. Huelsman and P.E. Allen: “Introduction to
the Theory and Design of Active Filters”, Chapter
7, pp. 366-370, McGraw-Hill, New York, 1980.
P. Bowron, K. A. Mezher and A. A. Muhieddine:
“Signal-handling capabilities of second-order
integrator-based three-amplifier filters”, Proc.
European Conference on Circuit Theory and
Design, EECTD-97, Budapest, August 1997.