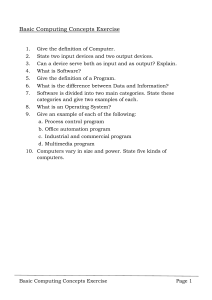
Hardware Components for Automation Sections: 1. Sensors 2. Actuators 3. Analog‐to‐Digital Conversion 4. Digital‐to‐Analog Conversion 5. Input/output Devices for Discrete Data 1 Hardware Components for Automation Computer Process Control System Input/output interface for different types of process parameters and variables 2 Hardware Components for Automation Computer‐Process Interface • To implement process control, the computer must collect data from and transmit signals to the production process • Components required to implement the interface: – Sensors to measure continuous and discrete process variables – Actuators to drive continuous and discrete process parameters – Devices for ADC and DAC – I/O devices for discrete data 3 Hardware Components for Automation Sensor‐ Transducer A wide variety of measuring devices is available for collecting data from the manufacturing process for use in feedback control. In general, a measuring device is composed of two components: A sensor and a transducers. Commonly, a sensor‐transducer combination is called transducer. the sensor detect the physical variable of interest (such as temp., pressure or force) and a property related to its characteristic changes: (e.g strain gauge‐ resistance change with deformation.) The transducer convert the physical variable into an alternative form (commonly electric voltage ), quantifying the variable in the conversion and enabling reading of the conversion. Thus has an electronic instrumentation (circuit) The quantified signal can be interpreted as the value of the measured variable. 4 Hardware Components for Automation Sensor‐ Transducer Temp &Strain gauge sensor Examples 5 Hardware Components for Automation Sensor‐ Transducer Strain gauge As the wire grid is distorted by elastic deformation, its length increases, and its cross‐sectional area decreases. These changes causes an increase in the resistance of the wire of the strain gauge, vice versa. An electronic circuit detect the resistance change and convert it to strain; or to weight if the dimensions of the loaded member is known 6 Hardware Components for Automation Sensor‐ Transducer In some cases the sensor and transducer are the same device; for example, a limit switch that convert the mechanical movement of a level to close an electric contact. 7 Hardware Components for Automation Sensors A sensor is a transducer that converts a physical stimulus from one form into a more useful form to measure the stimulus • Two basic categories: 1. Analog 2. Discrete • • Binary Digital (e.g., pulse counter) 8 Hardware Components for Automation Sensors Sensors‐analogue An analogue measuring device produces a continuous analogue signal such as electrical voltage, whose value varies in an analogue manner with the variable being measured. Examples as thermocouples, strain gauges, and potentiometers. The output signal from an analogue measuring device must be converted to digital data by an (ADC) in ordered to be used by digital computer. Sensors‐discrete A discrete measuring device produces an output that can have only certain values Discrete sensor devices are often divided into two categories: Binary and digital. 9 Hardware Components for Automation Sensors Sensor – discrete –binary A binary measuring device produces an output on/off (1‐0) signal. The most common devices operate by closing an electrical contact from a normally open position Limit switches operate in this manner. Other binary sensors include photo electric sensors and proximity switches 10 Hardware Components for Automation Sensors Sensor – discrete –digital A digital measuring device produces a digital output signal, either in the form of a set of parallel status bits (e.g., photo electric sensor array or a serious of pulses can be counted (e.g., an optical encoder) In either cases, the digital signal represents the quantity to be measured. Digital transducers are becoming increasingly common because they are easy to read when used as standalone measuring devices, and because they are compatible with digital computer systems 11 Hardware Components for Automation optical encoder Sensors photo electric sensor array 12 Hardware Components for Automation Sensors Sensors – MEMS A significant trend in sensor technology has been the development of very small sensors. The term micro sensors refer to measuring devices whose physical feature have dimensions in the micron (μm) range. Micro sensors usually fabricated out of silicon using processing techniques associated with integrated circuit manufacturing. 13 Hardware Components for Automation Sensors – MEMS Sensors Tire – pressure mentoring Mmes chips for automatic switching from portrait to landscape mode 14 Hardware Components for Automation Sensors Sensors – active Sensors can be classified as active or passive An active sensor responds to the stimulus without the need of any external power. An example as a thermocouple. Which respond to an increase in temperature by generating a small voltage (microvolt range) related to the measured temp. 15 Hardware Components for Automation Sensors Sensors – passive Passive sensor require an external power source in order to operate. A thermistor illustrates this case. It also measure the temp., but its operation requires an electric current to be passed through it As the temp increased, the thermistor electrical resistance change. The resistance can be determined and related back to the temp. 16 Hardware Components for Automation Sensor Transfer Function Sensors The relationship between the value of the physical stimulus and the value of the signal produced by the sensor in response to the stimulus S = f(s) where S = output signal, s = stimulus, and f(s) is the functional relationship between them. • Ideal functional form is simple proportional relationship: S = C + ms C‐ output value at stimulus value at zero m‐constant of proportionality between S and s. also can be thought as sensor sensitivity (it is the measure of how much the output of the sensor is affected by the stimulus. Eg. A standard chrome/alumel thermocouple generates 40.6 (μv) microvolt per degree celsius 0C 17 Hardware Components for Automation Sensor Clibration Sensors To use any measuring device, a calibration procedure is requred to establish the relationship between the physical variable to be measured and the converted output signal (such as voltage) The ease with which the calibration procedure can be accomplished is one criterion by which a measuring device can be evaluated 18 Hardware Components for Automation See table : Common measuring devices used in automation 19 Hardware Components for Automation Actuators Hardware devices that convert a controller command signal into a change in a physical parameter • The change is usually mechanical (e.g., position or velocity) • An actuator is a transducer because it changes one type of physical quantity into some alternative form • An actuator is usually activated by a low-level command signal, so an amplifier may be required to provide sufficient power to drive the actuator 20 Hardware Components for Automation Types of Actuators 1. Electrical actuators – Electric motors • • • DC servomotors AC motors Stepper motors – Solenoids 2. Hydraulic actuators – Use hydraulic fluid to amplify the controller command signal 3. Pneumatic actuators – Use compressed air as the driving force 21 Hardware Components for Automation Types of Actuators Hydraulic actuator Hydraulic actuators use a hydraulic fluid to amplify the controller command signal. The available devices provide either linear or rotational motion Hydraulic actuators are often specified when large force are required pneumatic actuator Pneumatic actuators use compressed air as the driving power. The available devices provide either linear or rotational motion pneumatic actuators are often specified for low force applications. 22 Hardware Components for Automation Comparison of hydraulic and pneumatic systems. System characteristic Hydrolic system Penumatic system Presureized fluid Oil [or water oil emulsion] Compressed air compressibility incompressible compressible Typical fluid l pressure level 20MPa 0.7 MPa Forces applied by device high Low Actuation speed of device low high Speed control Accurate speed Difficult to control accurately Problem with Fluid leaks Yes , potential hazard No, Relative coast of device high low Device construction and maintenance Close tolerance and good surface finish O rings used to prevent leaks instead of highly accurate components. Automation applications Preferred when high forces and accurate controls are required Preferred when low coast and high speed actuation are required 23 Hardware Components for Automation Pneumatic cylinders and motors 24 Hardware Components for Automation Hydraulic cylinders and motors 25 Hardware Components for Automation Electric Motors The motor consists of two basic components, Stator and rotor The stator is the ring-shaped stationary components, and the rotor is the cylindrical part that rotate inside the stator. The rotor is assembled around a shaft that is supported by bearings, and the shaft can be coupled to the machinery components such as gears, pulleys, lead screws or spindles. Electric current supplied to the motor generate a contentiously switching magnetic field that causes the rotor to rotate in its attempt to always align its poles with the opposite poles of the stator 26 Hardware Components for Automation A Rotating Electric Motor 27 Hardware Components for Automation DC Electric Motors Dc motor are powered by constant voltage. The continuously switching magnetic field is achieved by means of a rotary switching device, called a commutator, which rotate with the rotor and picks up current from a set of carbon brushes that are components of a stator assembly. Its function is to continually change the relative polarity between the rotor and stator, so that the magnetic field produce torque to continuously turn the rotor. The use of a commutator represent the traditional construction of the DC-Motor . The use of a commutator is a disadvantage because it results in arcing, worn brushes, and maintenance problems. 28 Hardware Components for Automation DC Electric Motors Special type of DC motor avoid the use of a commutator and brushes, called a brushless DC motor, it used a solid sate circuitry to replace the brushes and commutator components. Elimination of these parts has the added benefit of reducing the inertia of the rotor assembly, allowing higher speed operation . DC motors are widely used for two reasons: the convenience of using of using direct current as power source for example, the small electric motors in automobiles are DC because the car’s battery supplies direct current. the traditional popularity of DC motors is that their torque – speed relationship are attractive in many applications compared to AC-motors. 29 Hardware Components for Automation DC Electric Motors 30 Hardware Components for Automation DC Electric Motors 31 Hardware Components for Automation DC Electric Servomotors DC servomotors are a common type of DC motor used in mechanized and automated systems. The term servomotor simply means that a feedback loop is used to achieve position speed control. In a DC servomotor, the stator typically consists of two permanent magnet on opposite side of the rotor. The rotor, called the armature in DC motor, consists of three sets of copper wire windings around a ferrous metal core. Input current is provided to the windings through the commutator and interact with the magnetic field of stator to produce the torque that derive the rotor 32 Hardware Components for Automation DC Electric Servomotors The magnitude of the rotor torque is a function of the current passing through the windings, and the relationship can be modeled with the following equation. T KT I a T=Motor torque (N.m), KT,=torque constant of motor (N.m/amp), Ia =net armature current (amp) The reason for defining I as a net current is : Rotating the armature in the magnetic field of the stator produces voltages across the armature terminals, called the back emf. In effect the motor acts as a generator and the back emf increases with rotational speed as follows: Eb KV Eb=Back emf (V), KV,=the voltage constant of motor [V/(rad/sec)], ω =angular velocity (rad/sec) The effect of the back‐emf is to reduce the current flowing through the armature winding. 33 Hardware Components for Automation DC Electric Servomotors Note that, the angular velocity, ω in rad/sec can be converted to more familiar rotational speed N(rpm) 60 N 2 The relationship between Horsepower and Watts (T‐N.m, ω-rad/sec) T HP 745.7 34 Hardware Components for Automation DC Electric Servomotors Given the resistance of the armature Ra and an input voltage Vin supplied to the motor terminals, the resulting armature current well be Vin Ia Ra This is the starting current and it produce the starting torque as c T KT I a But as the armature begin to rotate it generate the back -emf Eb which reduce the available voltage. Thus the actual armature current depend on the rotational speed of the rotor. Vin Eb Vin K v Ia Ra Ra 35 Hardware Components for Automation DC Electric Servomotors V E V K T KT I a Ia in b Ra in v Ra The torque produced by the DC servomotor at speed ω is: Vin K v T k t Ra The power delivered by the motor is the product of torque and velocity P T P- power in watts (n.m/sec) T – motor torque n.m ω - Angular velocity rad/sec 36 Hardware Components for Automation DC Electric Servomotors The servomotor is connected either directly or through a gear reduction to a piece of machinery (fan, pump, spindle, table derive, etc.) which is basically a load that is driven by the servomotor. The load required a certain torque to operate, and the torque is usually related to the rotational speed in some way In general the torque increases with speed. In simplest case, the relationship is proportional: TL K L TL -load torque N.m KL -the constant of proportionality between torque and angular velocity Nm/(rad/sec) The functionality between kL and TL may be other than proportional, such that KL itself depend on angular velocity ω. 37 Hardware Components for Automation DC Electric Servomotors As example the torque required to derive a fan increases approximately as the square of the rotational speed, that is T 2 The torque developed by the motor and the torque required by the load must be balanced. That is, T=TL in steady state operation and this amount of torque is called the operating point. The motor torque relationship with angular velocity can be plotted as shown on the torque speed curve. As shown in fig. the intersection of the two plots is the operating point, which is defined by the values of torque and angular velocity 38 Hardware Components for Automation DC Electric Servomotors The intersection of the two plots is the operating point Torque‐Speed Curve of a DC Servomotor and Load Torque Plot 39 Hardware Components for Automation DC Electric Servomotors DC Servomotor operation A DC servomotor has a torque constant Kt =0095N.m/amp. Its voltage constant Kv =0.11 V/(rad/sec). The armature resistance Ra =1.6 ohms. A terminal voltage of 24 volt is used to operate the motor Determine a) The starting torque generated by the motor just as the voltage is applied (this is referred to as start torque) b) The maximum speed at a torque of zero. c) The operating point of the motor when it is connected to a load whose torque characteristic is given by TL = KL ω and KL =0.007 N.m/(rad/sec). culculate the rotational speed in rev/min. Solution: a) At ω=0 , then max torque is achieved. Eb K V 0 Vin Vin Eb 24 0 Ia 15 Amp Ra 1.6 40 Hardware Components for Automation DC Electric Servomotors Then, the starting torque: T K T I a 0.095(15) 1.425 Nm Vin b) At T=0; then Max speed is achieved. Vin Eb T k t Ra 0 then Vin Eb 14 k v 0.11 24 218.2 rad / sec 0.11 c) At operating point Tm =TL; TL K L 0.007 41 Hardware Components for Automation Vin Eb 24 0.11 0.0095 T k t 1.6 Ra TL K L 0.007 24 0.11 0.007 0.0095 1.6 105.3 rad / sec 1006 rev / min 42 Hardware Components for Automation AC induction motors AC motors can be classified into two categories: 1. Induction motors 2. Synchronous motors AC induction motor are the most widely used motor in the world, due to their relatively simple construction and low manufacturing coast (robust, cheap, brushless). In operation of this motor type, a magnetic filed is induced by the rotation of the rotor through the magnetic filed of the stator (the power supplied to the rotor by means of electromagnetic induction). Because of this feature, the rotor in most induction motors does not need an external source of electrical power. 43 Hardware Components for Automation AC synchronous motors AC synchronous motors operate by energizing the rotor with alternating current. Which generate a magnetic filed in the gap separating the rotor and stator. (rotating magnetic field is produced in stator) This magnetic field create a torque that turns the rotor at the same rotational speed as the magnetic forces in the stator. synchronous motors are somewhat more complex than induction motors because they require a device called an exciter to initiate rotation of the rotor when power is first supplied to the motor. The exciter accelerate the rotational speed of the rotor to synchronize with that of the stator rotating magnetic field, which is required condition for an ac synchronous motor to function. 44 Hardware Components for Automation AC motors AC induction motors and synchronous motors operate at constant speed that depends on the frequency of the incoming current. Their applications are usually those in which running at fixed speed is a requirement. This is a disadvantage in many automation applications because frequent speed changes are often necessary with much starting and stopping. The speed issue is sometimes addressed by using adjustable frequency drives (called inverters) that control the cycle rate of the AC power to the motor Motor speed is proportional to the frequency, so changing frequency changes motor speed. Advances in solid state electronics have also improved speed control for AC motors and they are new competitive in some application traditionally reserved for DC motors. 45 Hardware Components for Automation Stepper motors Stepper motors provide rotation in the form of discrete angular displacements, called step angles. Each angular step is actuated by a discrete electrical pulse, and the total angular rotation is controlled by the number of pulses received by the motor, and rotational speed is controlled by the frequency of the pulses. The step angle is related to the number of steps for the motor according to the relationship: 360 ns α- the step angle in Deg. ns : the number of steps (per revolution) which must be integer. Typical values for the step angle in commercially available stepper motors are: 7.5 Deg., 3.6 Deg., and 1.8 Deg. corresponding to 48,100, and 200 steps (pulses per revolution of the motor. 46 Hardware Components for Automation The total angle through which the motor rotates Am is given by: Am =np α Am angle measured in degree. np the number of pulses received by the motor. α- the step angle in oC The angular velocity ω in (rad/sec) and rotational speed N (rpm) are given by: ns fp 2f p ns N 60 f p ns the number steps in the motor (step/rev) or pulses received by the motor (pulses/rev). pulse frequency, (pulse /sec) (HZ). 47 Hardware Components for Automation Operation modes of Stepper motors There are two operating modes, locked step and slewing. In locked-step mode each pulse received by the motor causes a discrete angular step to be taken; the motor start and stop(at least approximatly) with each pulse. In this mode the motor can be started and stopped, and its direction of rotation can be reversed. In slewing mode, usually associated with higher speeds, the motor’s rotation is more or less contentious and does not allows for stopping or reversing with each subsequent step. Nevertheless, the rotor does not respond to each individual pulse; that is, the relationship between rotating speed and pulse frequency is retained in the slewing mode. 48 Hardware Components for Automation Stepper motors are used in : Open loop control systems For applications in which torque and power requirements are low or modest Used for position control system, no noise problems They are widly used in machine tools and other production machines, industrial robot, x-y plotters, medical and scientific instruments, and computer peripherals. Probably the most common application is to derive the hands of analog quartz watches. 49 Hardware Components for Automation Typical Torque‐Speed Curve of a Stepper Motor 50 Hardware Components for Automation Solenoids 51 Hardware Components for Automation Cylinder and Piston: (a) Single‐Acting and (b) Double‐Acting Q v A F PA V: velocity of the piston. (m/sec) Q: volumetric flow rate (m3 /sec) A: area of the piston (m2 ) F: applied force (N) P : fluid pressure (a) (b) 52 Hardware Components for Automation A Typical Analog Control Loop for the industrial process 53 Hardware Components for Automation Components of a Direct Digital Control System 54 Hardware Components for Automation 1 Computer‐Process Interface • To implement process control, the computer must collect data from and transmit signals to the production process • Components required to implement the interface: – Sensors to measure continuous and discrete process variables – Actuators to drive continuous and discrete process parameters – Devices (converters) for ADC and DAC – I/O devices for discrete data Hardware Components for Automation Analog‐to‐Digital interface 2 ‐We use RC filter to smooth out signal from random noise 4 –scale signal up or dowen Limit comparator to make the digital signal within limited rang Procedure for converting an Analog signal from the process into digital form Hardware Components for Automation Analog‐to‐Digital Conversion An ADC converts a continuous analog signal from transducer into digital code for use by computer • ADC consists of three phases: 1. Sampling phase – converts the continuous signal into a series of discrete analog signals at periodic intervals as in fig. 2. Quantization phase – each discrete analog (sample) is converted into one of a finite number of (previously defined) discrete amplitude levels 3. Encoding phase – discrete amplitude levels are converted into digital code, representing the amplitude level obtained as a sequence of binary digit. 57 Hardware Components for Automation General characteristics of an ADC (how to select it) • Sampling rate – rate at which continuous analog signal is polled (recorded) • Conversion time – how long it takes to convert the sampled signal to digital code • Resolution – depends on number of quantization levels • Conversion method – means by which analog signal is encoded into digital equivalent – Example – Successive approximation method Hardware Components for Automation Analog Signal Converted into a Series of Discrete Data by A‐to‐D Converter 59 Hardware Components for Automation Successive Approximation Method A series of trial voltages are successively compared to the input signal whose value is unknown Number of trial voltages = number of bits used to encode the signal First trial voltage is 1/2 the full scale range of the ADC If the remainder of the input voltage exceeds the trial voltage, then a bit value of 1 is entered, if less than trial voltage then a bit value of zero is entered The successive bit values, multiplied by their respective trial voltages and added, becomes the encoded value of the input signal 60 Hardware Components for Automation Successive Approximation Method Example for input voltage of 6.8 V 61 Hardware Components for Automation Digital‐to‐Analog Conversion Converts the digital output of the computer into a continuous analog signal to drive an analog actuator (or other analog device) • DAC consists of two steps: 1. Decoding – digital output of computer is converted into a series of analog values at discrete moments in time 2. Data holding – each successive value is changed into a continuous signal that lasts until the next sampling interval 62 Hardware Components for Automation Data Holding Step in DAC: (a) Zero‐Order Hold and (b) First‐Order Hold (a) (b) 63 Hardware Components for Automation Characteristic of manufacturing process data continuous analog signal: as force, pressure, temp, flow rate, velocity etc. Discrete binary data: as on or of; open or closed; etc pulse data (discrete data that are not restricted to binary; i.e. more than two values are possible: as digital tachometers and turbine flow meters; to run stepping motors etc. 64 Hardware Components for Automation Process data input/output Computer‐process Interface 65 Sequence control and programmable controllers Binary input and output devices Device INPUT (Sensors) OUTPUT (Actuators) Limit switch Photo-detector Pushbutton switch Timer Control relay Circuit breaker Motor Valve Clutch Alarm buzzer Control relay Solenoid Lights one/zero interpretation Contact/no contact Contact/no contact On/off On/off Contact/no contact Contact/no contact On/off Open/closed Engaged/not engaged on/off Contact/no contact energized /not energized On/off 66 Hardware Components for Automation Input/Output Devices for Discrete Data Binary data: • Contact input interface – input data to computer • Contact output interface – output data from computer Discrete data other than binary: • Contact input interface – input data to computer • Contact output interface – output data from computer Pulse data: • Pulse counters ‐ input data to computer • Pulse generators ‐ output data from computer Hardware Components for Automation Contact Input/Output Interfaces Contact input interface: series of contacts that are open or closed to indicate the status of individual binary devices such as limit switches and valves – The computer periodically scans the contacts to update values in memory – Can also be used for discrete data other than binary (e.g., a photoelectric sensor array) Contact output interface: communicates on/off signals from the computer to the process – Values are maintained until changed by the computer Hardware Components for Automation Pulse Counters and Generators Pulse counter: Converts a series of pulses (pulse train) into a digital value – Digital value is then entered into the computer through its input channel – Most common – counting electrical pulses – Used for both counting and measurement applications Pulse generator: A device that produces a series of electrical signals – The number of pulses or frequency of the pulse train is specified by the computer Hardware Components for Automation Multiplexers In electronics, a multiplexer (or mux) is a device that selects one of several analog or digital input signals and forwards the selected input into a single line. A multiplexer of 2n inputs has n select lines, which are used to select which input line to send to the output. Multiplexers are mainly used to increase the amount of data that can be sent over the network within a certain amount of time and Bandwidth. A multiplexer is also called a data selector. Hardware Components for Automation Multiplexers Schematic of a 1‐to‐2 Demultiplexer. Like a multiplexer, it can be equated to a controlled switch. Schematic of a 2-to-1 Multiplexer. It can be equated to a controlled switch. 71 Hardware Components for Automation Multiplexers The basic function of a multiplexer: combining multiple inputs into a single data stream. On the receiving side, a demultiplexer splits the single data stream into the original multiple signals. 72 Sequence control and programmable controllers HARDWARE FOR IMPLEMENTING COMBINATIONAL SYSTEMS Binary sensors : for example limit switches and photodetector switch. Solenoid Electromechanical relay 73 Sequence control and programmable controllers Electromechanical relay 74 Sequence control and programmable controllers 75 Sequence control and programmable controllers 76 Sequence control and programmable controllers 77