INTERFACING
Hardware Interfacing
1. Waveform Generation using Dual DAC
2. Stepper Motor interface.
3. LCD Interface
4.ADC interface
5.LED Interface
6.Serial port Interface
1. Dual Dac Interface to generate
a.
b.
c.
d.
Square waveform
Triangular Waveform
Ramp waveform
Sine waveform
The DAC is a device widely used to convert digital pulses to analog signals.
There are two methods of creating a DAC. They are binary weighted and R/2R ladder.
The Binary Weighted DAC, which contains one resistor or current source for each bit of the
DAC connected to a summing point. These precise voltages or currents sum to the correct
output value. This is one of the fastest conversion methods but suffers from poor accuracy
because of the high precision required for each individual voltage or current. Such highprecision resistors and current-sources are expensive, so this type of converter is usually limited
to 8-bit resolution or less.
The R-2R ladderDAC, which is a binary weighted DAC that uses a repeating cascaded structure
of resistor values R and 2R. This improves the precision due to the relative ease of producing
equal valued matched resistors (or current sources). However, wide converters perform slowly
due to increasingly large RC-constants for each added R-2R link.
The first criterion for judging a DAC is its resolution, which is a function of the number of
binary inputs. The common ones are 8, 10, and 12 bits. The number of data bit inputs decides
the resolution of the DAC since the number of analog output levels is equal to 2n, where n is
the number of data bit inputs.
DAC0808:
The digital inputs are converter to current Iout, and by connecting a resistor to the Iout pin, we
can convert the result to voltage. The total current Iout is a function of the binary numbers at the
D0-D7 inputs of the DAC0808 and the reference current Iref , and is as follows:
MICROCONTROLLERS LAB-18ECL47
2019-20
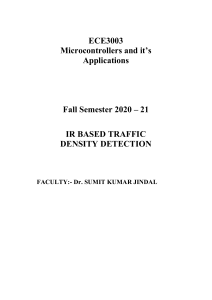
Usually reference current is 2mA. Ideally we connect the output pin to a resistor, convert this
current to voltage, and monitor the output on the scope. But this can cause inaccuracy; hence
an op-amp is used to convert the output current to voltage. The 8051 connection to DAC0808
is as shown in the figure 1 below.
Figure 1: 8051 connection to DAC0808
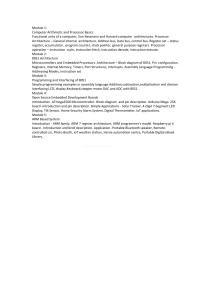
Dual DAC
P0.0
to
P0.7
8
0
P1.0
5
to
1
P1.7
DAC
B10800
B8
Xout
CRO
DAC
B10800
Yout
B8
Figure 2: Circuit Diagram for waveform generation
Dept. of Electronics &Telecommunication Engineering, B.I.T
2
MICROCONTROLLERS LAB-18ECL47
2019-20
1a.Write an 8051 ALP to generate a square waveform of 5v amplitude on Port0./Port 1
using DAC (Digital-to-Analog converter).
Algorithm
1.
2.
3.
Let initial, amplitude of the square wave be 0V.
Output the values 00h (0ff) and ffh (on) Values through P0/P1.
Every time amplitude output the value thro P0/P1 note the waveform on CRO.
Program
#define
BACK:
delay 0x0E2EE
/*500usec delay routine available in monitor*/
ORG 0
MOV A,#00H /*Clear Accumulator*/
MOV P0,A /*Move 00h to P0 & P1*/
MOV P1,A
LCALL DELAY
/*Call delay routine*/
MOV A,#0FFH
/*Move FFh into Accumulator*/
MOV P0,A /*Move FFh to P0 & P1*/
MOV P1,A
LCALL DELAY
SJMP BACK
DELAY: MOV R1,#0FFH
HERE: DJNZ R1,HERE
RET
END
/* Generate random delay*/
Dept. of Electronics &Telecommunication Engineering, B.I.T
3
MICROCONTROLLERS LAB-18ECL47
2019-20
Flow chart:
STAR
T
Configure P1 a O/P port
Load P1 with
FFH
CALL DELAY
Load P1 with
00H
CALL DELAY
Flowchart for Square wave generation using DAC
1b. Write an 8051 ALP to generate Triangular waveform of 5v amplitude on
Port0./Port 1 using DAC.
Algorithm
Output the initial value 00 through P0.
Increment it in steps of 1 until a count value of FFh (5V) is reached. Every time
repeat step 1.
3. Decrement it in steps of 1 until a zero value is reached and repeat step 1.
1.
2.
Dept. of Electronics &Telecommunication Engineering, B.I.T
4
MICROCONTROLLERS LAB-18ECL47
2019-20
Program
UP:
ORG 0
CLR A /*Clear Accumulator*/
MOV P0,A /*Move 00h to P0 & P1*/
MOV P1,A
INC A /*Increment Accumulator*/
CJNE A,#0FFH,UP /*Compare Accumulator with FFh */
DOWN:
MOV P0,A /*Move 00h to P0 & P1*/
MOV P1,A
DEC A /*Decrement Accumulator*/
CJNE A,#00,DOWN /*Compare Accumulator with 00h */
SJMP UP
END
Flow Chart
Dept. of Electronics &Telecommunication Engineering, B.I.T
5
MICROCONTROLLERS LAB-18ECL47
2019-20
Flowchart
for Triangular
wave
using DACof 5v amplitude on
1c. Write an 8051
ALP to generate
Ramp
(up generation
or down) waveform
Port0./Port 1 using DAC.
//UP RAMP
Algorithm
Output the initial value 00 through P0.
Increment it in steps of 1 until a count value of FFh (5V) is reached. Every time
repeat step 1.
3. Repeat step 1 & 2 continuously.
1.
2.
Program
ORG 0
CLR A
/*Clear Accumulator*/
UP:
MOV P0,A /*Move 00h to P0 & P1*/
MOV P1,A
INC A
/*Increment Accumulator*/
CJNE A,#0FFH,UP /*Compare Accumulator with FFh */
SJMP UP
END
//DOWN RAMP
Algorithm
Output the initial value FF through P0.
Decrement it in steps of 1 until a count
repeat step 1.
3. Repeat step 1 & 2 continuously.
1.
2.
value of 00h (0V) is reached. Every time
Program
ORG 0
UP1:
MOV A,#0FFH
UP:
MOV P0,A
MOV P1,A
DEC A
CJNE A,#00H,UP
/*Move FFh into Accumulator*/ UP:
/*Move FFh to P0 & P1*/
/*Decrement Accumulator*/
/*Compare Accumulator with 00h */
SJMP UP1
END
Dept. of Electronics &Telecommunication Engineering, B.I.T
6
MICROCONTROLLERS LAB-18ECL47
2019-20
Start
Initialize Accumulator
Send accumulator
content to DAC
accumulatot
Point DPTR to message
to
Increment/Decrement
accumulator
If
ACC≤
FF/00
Stop
Flowchart for Ramp wave generation using DAC
Dept. of Electronics &Telecommunication Engineering, B.I.T
7
MICROCONTROLLERS LAB-18ECL47
2019-20
1d. Write an 8051 ALP to generate Sine waveform of 5v amplitude (10V p-p)on
Port0./Port 1 using DAC.
Algorithm
Compute different step values (θ = 20o,15o…) of sine using the equation
V= 5V +5Vsinθ. . Output the values thro P0.
1. More the steps smoother will be sine wave.
2. E.g.: θ = 1o
V= 5V +5Vsinθ = 5V
The value sent to DAC is 25.6X5V= 128.
Program
ORG 0000H
CLR A
UP :
/* Clear Accumulator*/
MOV DPTR,#SINE /*Move the address of look up table*/
MOV R0,#36 /* Output different values */
LABEL:
MOVC A,@A+DPTR /* Move the value from look up table into Accumulator*/
MOV P0,A/* Move accumulator value to P0 &P1*/
MOV P1,A
CLR A
INC DPTR
/* increment DPTR
DJNZ R0,LABEL /* Jump to label till R0=00h*/
SJMP UP
/* infinite loop*/
ORG 050H
SINE:DB128,151,172,192,210,226,239,248,254,255,254,248,239,226,210,192,172,150,128,
106,84,64,46,30,17,8,2,0,2,8,17,30,46,64,84,106
END
Dept. of Electronics &Telecommunication Engineering, B.I.T
8
MICROCONTROLLERS LAB-18ECL47
2019-20
Flowchart:
STAR
T
INITIALISE VARIABLE
USE DPTR AS A POINTER
TO POINT TO THE LOOK
UP TABLE
DATA ACCESSING USING
INDEXED ADREESSING
MODE
VALUE IS SENT TO THE PORT 1
AND INCREEMENT DPTR
DECREEMENT
COUNTER =
0??
NO
YES
END
Flowchart for Sine wave generation using DAC
Dept. of Electronics &Telecommunication Engineering, B.I.T
9
MICROCONTROLLERS LAB-18ECL47
2019-20
2. Stepper motor Interfacing -8051
A stepper motor is a device that translates electrical pulses into mechanical movement in steps
of fixed step angle.So, The stepper motor rotates in steps in response to the applied signals. It
is used in disk drives, dot matrix printers, plotters and robotics and process control industries.It
is mainly used for position control. Stepper motors have a permanent magnet called rotor
(also called the shaft) surrounded by a stator . There are also steppers called variable reluctance
stepper motors that do not have a PM rotor. The most common stepper motors have four stator
windings that are paired with a center-tap. This type of stepper motor is commonly referred to
as a. four-phase or unipolar stepper motor. The center tap allows a change of current direction
in each of two coils when a winding is grounded, thereby resulting in a polarity change of the
stator.
Even a small stepper motor require a current of 400mA for its rotation.But the ports of the
microcontroller can not source this much amount of current .If you try to connect the motor
directly to the microcontroller ,the motor try to draw large current from the controller and the
microcontroller will be damaged .So, we need to use a driver circuit ,to increase the port current
of the microcontroller. This can be achieved by using an array of power transistors.But now a
days we have driver circuits available readily in the form of ICs.ULN2003 is one such driver
IC which is a High-Voltage High-Current Darlington transistor array and can give a current of
500mA.This current is sufficient to drive the stepper motor. This IC is also provided with
Dept. of Electronics &Telecommunication Engineering, B.I.T
10
MICROCONTROLLERS LAB-18ECL47
2019-20
diodes that can avoid the damage of motor due to back emf and large eddy currents. So, this
ULN2003 is used as a driver to interface the stepper motor to the microcontroller.
The significant thing in a stepper motor is the step angle. It is the minimum angle through
which the motor rotates in response to each excitation pulse. In a four phase motor if there are
200 steps in one complete rotation then then the step angle is 360/200 = 1.8 0 .So to rotate the
stepper motor we have to apply the excitation pulse. For this we send a hexa decimal code
through the ports of the microcontroller. The hex code mainly depends on the construction of
the steppe motor. So, all the stepper motors do not have the same Hex code for their rotation.
We have to refer the operation manual supplied by the manufacturer.
3. Write an 8051 ALP to run the stepper motor in clockwise / Anti clock wise directions.
Stepper motor unlike DC motor rotates in steps.
step
Stepper motor has 4 coils which forms the stator and a central rotor.
Rotation depends on excitation of stator coils.
coil A coil B coil C coil D
1
0
0
0
1
2
1
0
0
0
3
0
1
0
0
4
0
0
1
0
Anyone of these values forms the initial value. To get 360o revolution 200 steps are required.
Step angle= 360o /200 = 1.8o. (difference between 2 teeth).
Algorithm
1.
2.
3.
4.
Configure P0 as output.
Apply the initial excitation of 11 to motor coils through P0.
For clockwise motion -Rotate right once the excitation and repeat step 2.
For anticlockwise motion -Rotate left once the excitation and repeat step 2.
Dept. of Electronics &Telecommunication Engineering, B.I.T
11
MICROCONTROLLERS LAB-18ECL47
2019-20
Program
ORG
0H
SJMP 30H
ORG
30H
MOV
MOV
P0,#00H
A,#88H
MOV
ACALL
ACALL
RL
SJMP
P0,A
DELAY
DELAY
A
LOOP
DELAY:
MOV
R1,#0FFH
DECR:
MOV
R2,#0FFH
DECR1:
DJNZ R2,DECR1
LOOP:
/*P0 as output*/
/*DATA to activate one winding at a time*/
/*Move it to P0*/
/*Delay*/
/*Rotate the bit pattern*/
DJNZ R1,DECR
RET
END
Dept. of Electronics &Telecommunication Engineering, B.I.T
12
MICROCONTROLLERS LAB-18ECL47
2019-20
Start
Initialize Ports
Set count for stepping
sequence
Out put data for a sequence
Wait for a delay time
Decrement counter
No
Is count
=0
Yes
Stop
Flowchart for Stepper Motor Interface
Dept. of Electronics &Telecommunication Engineering, B.I.T
13
MICROCONTROLLERS LAB-18ECL47
2019-20
4. Interfacing LCD Module -8051 Microcontroller:
LCD modules are based on liquid crystaltechnology. The seven segment displays suffer from
dissipation of power and also they are not suitable for display of graphs etc.. Hence the Liquid
Crystal modules have become very popular now a days. They consume less power and they are
highly suitable to display graphics ,numbers and characters etc..
General LCD modules are available in different version like 1x16 (one line -16 characters) or
2x16 (two lines -16 characters)or 2 x 20(two lines 20 characters) etc..The pin diagram of the
LCD module is shown below.It is a 14-pin module in which 8 pins are for data ,one pin is Vcc,
one pin is Gnd ,one pin is for contrast(Vee) ,one pin is for RS,one pin is for EN and another
pin is used for R/W.
The description of the pins is given below.
The pins 7 -1 4 denotes the data pins which are used to transfer Data .These pins are used to
send information to the LCD or to read the contents of the LCD’s internal registers.
RS is the register select pin..The LCD has two internal registers.One is command code register
and the other is the data register.The command code register is used to send commands like
clear display,cursor at home etc..The data register allows the user to send the data to be
displayed on the LCD.
When RS = 1 ,the data register is selected and when RS = 0 the command code register is
selected.
RS = 0 is also used to check the busy flagbit to find whether the LCD is ready to receive
information. The busy flag is D7 and can be read when R/W = 1 and RS=0.
For ex: if R/W= 1 ,RS=0 AND D7 = 1 means the LCD is busy due to internal operations and
will not accept any new data. Suppose D7=0 means the LCD is ready to receive the data.
R/W pin allows the user to read the information from LCD or write information to the LCD.
When R/W = 0 writing is enabled and R/W=1 read is enabled.
Dept. of Electronics &Telecommunication Engineering, B.I.T
14
MICROCONTROLLERS LAB-18ECL47
2019-20
EN pin is used by the LCD to latch information on its data pins.When data is given to data
pins,a high to low pulse must be applied to this pin so that the LCD can Latch in the data
present at the data pins.
Vcc ,Vss and Vee pins denote supply , ground and contrast pins respectively. Vee pin is meant
for adjusting the contrast of the LCD display and the contrast can be adjusted by varying the
voltage at this pin. This is done by connecting one end of a POT to the Vcc (5V), other end to
the Ground and connecting the center terminal (wiper) of of the POT to the Vee pin. The
contrast pin is applied a negative voltage so that by adjusting this voltage the contrast of the
Display can be controlled.
Interfacing circuit: The interfacing of LCD module to 8051 microcontroller is shon below.
The 8-data pins are connected to Port1 and control pins are connected to Port 2 pins.The busy
flag must be checked before the data is send to the LCD.With the help of a 10K potentiometer
the contrast of the LCD display is adjusted.
Dept. of Electronics &Telecommunication Engineering, B.I.T
15
MICROCONTROLLERS LAB-18ECL47
2019-20
3.Write an 8051 ALP to initialize and display String “MICROCONTROLLER” on
LCD*/
Algorithm
1. LCD initialization.
The steps for initializing the LCD display.
Send 38H to the 8 bit data line for initialization
Send 0CH Display ON & No cursor & Blink off.
Send 80H for displaying RAM address.
Send 01H for clearing the display and return the cursor.
2. Sending data to the LCD.
The steps for sending data to the LCD module.
Make R/W low.
Make RS=0 if data byte is a command and make RS=1 if the data byte is a data to be
displayed.
Place data byte on the data register.
Pulse E from high to low.
Repeat above steps for sending another data.
Program
#define
#define
#define
RS
P3.7
/*lcd register select (0)- instruction reg & (1) data reg*/
RW
P3.6
/*read (1) or write (0)*/
E
P3.5
/*lcd enable*/
ORG 0H
SJMP 30
ORG 30H
ACALL INIT
/*Routine initialize the LCD*/
MOV DPTR,#MSG
/*Point to message to be displayed*/
DISP: CLR A
/*clear acc*/
MOVC A,@A+DPTR /*Get the character to be displayed*/
JZ HERE
/*if it is last char terminate the routine*/
ACALL DAT
/*Routine to write into LCD display RAM*/
INC DPTR
/*increment the pointer*/
SJMP DISP
/* display again*/
HERE: SJMP $
Dept. of Electronics &Telecommunication Engineering, B.I.T
16
MICROCONTROLLERS LAB-18ECL47
INIT:
2019-20
/*LCD initialization Routine*/
MOV A,#38H /* func set command word, selects 2 data lines, 2 disp lines, font 5x7*/
ACALL CMD
/*routine to write into command reg*/
MOV A,#01H
/*clear LCD display*/
ACALL CMD
MOV A,#0CH
/*Command, selects the Display ON & No cursor & Blink off*/
ACALL CMD
MOV A,#80H
/*Sets the display RAM address*/
ACALL CMD
/*i.e. selects the first line*/
RET
CMD:
CLR RS
CLR RW
MOV P2,A
SETB E
CLR E
ACALL DELAY
RET
/* Select Instruction Register, by making RS low*/
/*Select LCD Write operation, by clearing RW*/
/*move Command DATA into P2 , i.e. LCD Data BUS*/
/*Enable the LCD by making high */
/*Disable the LCD*/
DAT:
SETB RS
CLR RW
MOV P2,A
SETB E
CLR E
ACALL DELAY
RET
DELAY:
MOV R1,#0FFH
DJNZ R1,$
DJNZ R2, DELAY
RET
ORG 100H
MSG: DB
END
/* Select DATA register of LCD*/
/*Select Read operation*/
/*Move the DATA to P2*/
/*Enable LCD*/
/*Disable LCD*/
/*0usec delay, when clock 11.0592MHz*/
"MICROCONTROLLER",00H
Dept. of Electronics &Telecommunication Engineering, B.I.T
17
MICROCONTROLLERS LAB-18ECL47
2019-20
Start
Initialize LCD
38H 2line ‘5x7’
01H clear LCD
80H 1st line
Send to display
Send to Command
register
Point DPTR to message
Move character to
accumulator
Check
if A =
0
Stop
Send character to data
register
Increment DPTR
Flowchart for LCD Interface
Dept. of Electronics &Telecommunication Engineering, B.I.T
18
MICROCONTROLLERS LAB-18ECL47
2019-20
Interfacing toggle switch
The circuit diagram for interfacing push button switch to 8051 is as shown in the diagram.
Push button S1 connected to the INT0 pin is depressed the LED D1 connected to P0.0 goes
ON and remains ON until push button switch S1 is depressed and this cycle can be repeated.
Push button switch S2 is connected to the INT1 pin is depressed the LED D2 connected to P0.0
goes ON and is turned off after a delay time when a push button switch S2 is still depressed.
6.Write an ALP using 8051 to Interface a simple toggle switch to generate an interrupt
Which switches on an LED (i) continuously as long as switch is on and (ii) only once for
a small time when the switch is turned on.
ORG 0000H
LJMP MAIN
ORG 0013H
SETB P0.0
CLR P0.0
RETI
Dept. of Electronics &Telecommunication Engineering, B.I.T
19
MICROCONTROLLERS LAB-18ECL47
2019-20
ORG 0003H
SETB P0.7
ACALL DELAY
CLR P0.7
ACALL DELAY
RETI
ORG 30H
MAIN: MOV IE, #85H
HERE: SJMP HERE
DELAY:
MOV R7,#0C8H
MOV TMOD,#01H; //16-bit timer0 selected
L2:
MOV TH0,#0DBH; // loading high byte in TH
MOV TL0,#0FFH; // loaded low byte in TL
SETB TR0
// running the timer
L1: JNB TF0, L1; //checking the timer flag register if it is not equal to 1
CLR TR0 ; // if tf0=1 stop the timer
CLR TF0 ;
DJNZ R7,L2
// clear the timer flag bit for next calculation
RET
END
Start
Initialize Ports
Enable interrupts
If
INTO
=0
If
INTO
=1
Turn on LED 2
Turn on LED 1
Delay
Stop
Stop
Dept. of Electronics &Telecommunication Engineering, B.I.T
20
MICROCONTROLLERS LAB-18ECL47
2019-20
Analog-to-digital converter (ADC) interfacing:
ADCs (analog-to-digital converters) are among the most widely used devices for data
acquisition. A physical quantity, like temperature, pressure, humidity, and velocity, etc., is
Converted to electrical (voltage, current) signals using a device called a transducer, or sensor
We need an analog-to-digital converter to translate the analog signals to digital numbers, so
microcontroller can read them.
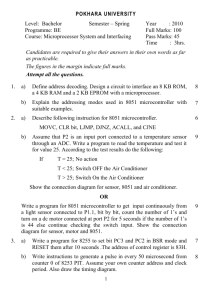
ADC0808/0809 chip:
ADC808 has 8 analog inputs. It allows us to monitor up to 8 different transducers using only
single chip. The chip has 8-bit data output just like the ADC804. The 8 analog input channels
are multiplexed and selected according to the values given to the three address pins, A, B, and
C. that is; if CBA=000, CH0 is selected; CBA=011, CH3 is selected and so on. The pin details
of ADC0808 are as shown in the figure 11 below. (Explanation can be done as is with
ADC0804).
Figure 11: Pin out of ADC0808
Steps to Program ADC0808/0809
1. Select an analog channel by providing bits to A, B, and C addresses.
2. Activate the ALE pin. It needs an L-to-H pulse to latch in the address.
3. Activate SC (start conversion) by an H-to-L pulse to initiate conversion.
4. Monitor EOC (end of conversion) to see whether conversion is finished.
5. Activate OE (output enable) to read data out of the ADC chip. An H-to-L pulse to the OE
pin will bring digital data out of the chip.
ADC will convert this analog voltage into equivalent digital value. This digital signal is applied
to the Port 1 of the microcontroller .The data is processed and displayed on the LCD module.
Dept. of Electronics &Telecommunication Engineering, B.I.T
21
MICROCONTROLLERS LAB-18ECL47
2019-20
Note : This method is useful to measure small currents only. Because with large currents the
small resistor will dissipate large heat. So, to measure large voltages high wattage wire wound
resistors or Torroid must be used.
4. Write an 8051 ALP to interface ADC-0804 and convert an analog input connected to
it and display the digital value on LCD.
#define
#define
#define
lcdstr
lcddat
hexasc
sbit eoc
= P2^4
sbit start_conv = P1^5
sbit read_adc = P1^6
adc_data
0x0e39e
0x0e2b4
0x0e3b0
; End of conversion
;start of converstion
; Read ADC
data 0x50
ORG 0000H
SJMP
30h
ORG 30h
L1:
MOV DPTR,#msg1
LCALL lcdstr
CALL CONVERT
CALL
DISPLAY
SJMP L1
/*Display the above string on LCD*/
CONVERT:
MOV P0,#0ffh
MOV P1,#00h
MOV
R3,#07H
MOV A,R3
MOV P1,A
/*P0 as input port*/
/*P1 as output port*/
/* SELECT CHANNEL 7 */
/*check for the conversion*/
SETB
/*start conversion */
start_conv
CLR
start_conv
NOP
JB eoc,$
SETB
nop
MOV
MOV
CLR
RET
display: MOV
SWAP
read_adc
/*clear conversion */
/*read ADC*/
A,P0
adc_data,A
read_adc
A
A,#adc_data
/*Get the scanned value into A reg*/
/*Swap to get the highernibble into lower nibble*/
Dept. of Electronics &Telecommunication Engineering, B.I.T
22
MICROCONTROLLERS LAB-18ECL47
2019-20
LCALL
hexasc
/*convert higher nibble to ASCII*/
LCALL
lcddat
/*Display it on LCD*/
MOV
A,adc_data
LCALL
hexasc
/*Convert to ASCII*/
LCALL
lcddat
RET
msg1: db
'Digital value=',00h
END
Start
Initialize ports
Send SOC to ADC
If EOC
= =1
Send read signals to
ADC
Read the data from
ADC
Convert Hex to ASCII
Display on LCD
Flowchart for interfacing ADC
Stop
Dept. of Electronics &Telecommunication Engineering, B.I.T
23
MICROCONTROLLERS LAB-18ECL47
2019-20
Interfacing the 8051 Microcontroller serial port to PC:
As the RS-232 standard is developed earlier to TTL devices ,a USART such as 8251 is not
directly compatible with these signal levels .Because of this ,voltage transistors called line
drivers and line receivers are used to interface TTL logic with RS-232 signals . The line driver
MC 1488 is used to convert RS-232 to TTL. The microcontroller is connected to the PC using
the DB9 connector.
The TxD and Rx D pins are connected to the TI in and RI in pins of the MAX 232 IC and the
TI out and RI in pins of the MAX IC are connected to the RxD and TxD pins of the DB9
connector as shown in the interface diagram.
Basics of Serial communication
Data transfer between two electronic devices (Ex Between a computer and microcontroller or
a peripheral device) is generally done in two ways
(i).Serial data Transfer
and
(ii).Parallel data Transfer
Serial communication uses only one or two data lines to transfer data and is generally used for
long distance communication. In serial communication the data is sent as one bit at a time in
a timed sequence on a single wire. Serial Communication takes place in two methods,
Asynchronous data Transfer and Synchronous data Transfer.
Dept. of Electronics &Telecommunication Engineering, B.I.T
24
MICROCONTROLLERS LAB-18ECL47
2019-20
Serial Data Transfer
Communication through RS232
A personal computer has a serial port known as communication port or COM Port used to
connect a modem for example or any other device, there could be more then one COM Port in
a PC. Serial ports are controlled by a special chip called UART (Universal Asynchronous
Receiver Transmitter).
RS 232 standard describes a communication method where information is sent bit by bit on a
physical channel. The RS stands for Recommended Standard.The information must be
broken up in data words. The length of a data word is variable.
It is one of the popularly known interface standard for serial communication between
DTE & DCE. This RS-232-C is the commonly used standard when data are transmitted as
voltage .This standard was first developed by Electronic industries association(EIA). For
the RS-232C, a 25 pin D type connector is used . DB-25P male and DB-25S female. RS232 standard was first introduced in 1960’s by Telecommunications Industry
Association(TIA).
5. Write a C program to (i) transmit and (ii) to receive a set of characters serially by
interfacing 8051 to a terminal.
//Sending Data to PC Hyper terminal
#include<reg51.h>
void main()
{
char A[]="Serial Communication";
unsigned int i=0;
P3=0x03; //Initializing 8051 UART ports as input port
TMOD=0x20; // Timer1 Mode2 8 bit auto reload
TH1=0xFD; // 9600 bps
SCON=0x50; // 8 Data bit, 1 start bit, bit 1 stop
TR1=1; // Timer1 ON
while(1)
{
while(A[i]!='\0'){
SBUF=A[i]; // Placing character one by one in the serial buffer register
while(TI==0); // It automatically poles up to 1 when character is transmitted
TI=0;
i++;
}
i=0;
Dept. of Electronics &Telecommunication Engineering, B.I.T
25
MICROCONTROLLERS LAB-18ECL47
2019-20
}
}
//Receiving the data from PC hyper terminal
#include<reg51.h>
sbit rs=P3^5; //Register select (RS)
sbit en=P3^6; //Enable (EN) pin
sbit rw=P3^7; //Read write (RW) pin
//Function for sending values to the command register of LCD
void lcdcmd(unsigned char value)
{
P1=value;
rs = 0;
rw = 0;
en = 1;
delay(50);
en=0;
delay(50);
}
//Function for sending values to the data register of LCD
void display(unsigned char value)
{
P1=value;
rs = 1;
rw = 0;
en = 1;
delay(500);
en=0;
delay(50);
}
//function to initialize the registers and pins of LCD
void lcdint(void)
{
P1=0x00; //Port 1 is used as output port
P3=0x03; //Port 3 higher bits from 2 to 7 are used as output and lower two
//bits are used to activate
void delay(unsigned int time) //Time delay function
{
unsigned
int i,j;
for(i=0;i< time;i++)
for(j=0;j<5;j++);
}
lcdcmd(0x38);
lcdcmd(0x01);
Dept. of Electronics &Telecommunication Engineering, B.I.T
26
MICROCONTROLLERS LAB-18ECL47
2019-20
lcdcmd(0x80);
}
void main()
{
char dat;
lcdint();
TMOD=0x20; // Timer1 Mode2 8
bit auto reload
TH1=0xFD; // 9600 bps
SCON=0x50; // 8 Data bit, 1 start
bit, 1 stop bit
TR1=1; // Timer1 ON
while(1)
{
while(SBUF!=0x0D)//Checking if enter key is pressed
{
while(RI==0);
dat=SBUF;
RI=0;
display(dat);
delay(50);
}
}
}
In PC go to Start->Programs->Accessories->Communications->HyperTerminal open new
connection, name it whatever you want then click OK. Now a window appears select COM1
from connect using drop down menu click OK Now set COM1 properties bits per second as
you specified in the program for example 9600, Data bits=8, Parity=none, Stop bits=1, Flow
control=none then click OK
1
START
Start timer 1
Flow chart
main
Is for
TI Flag
program
high
r main
program
Load
T
SBUF to
A
register
Clear
R1 Flag
START
Program TMOD Register for
timer- 1 in mode-2 operation
Load initial court in high order
count register of timer-1
Load port-0 content in A
register
Delay
Clear
TI Flag
Load content of register in port -2
Program SCON Register for
mode-1 serial communication
Return
1
Flow chart for main program
Dept. of Electronics &Telecommunication Engineering, B.I.T
Flow chart for interrupt
service subroutine
27
MICROCONTROLLERS LAB-18ECL47
2019-20
8051-Viva Questions
1. What is meant by micro controller?
Microcontroller is a small chip that has in-build Micro processor, memory, ports, timers
and converter. Micro controllers are designed for specific use. For instance, micro
controller in TV remote is mainly designed for controlling TV.
2. List out the features of 8051 micro controller?
40 Pin IC.
128 bytes of RAM.
4K ROM.
2 Timers (Timer 0 and Timer 1).
32 Input/ Output pins.
1 serial port.
6 Interrupts (Including Reset).
3. What are the types of interrupts in 8051?
External interrupt 0 (IE0) has highest priority among interrupts.
Timer interrupt 0 (TF0)
External interrupt 1 (IE1)
Timer interrupt 1 (TF1) has lowest priority among other interrupts.
Serial port Interrupt
Reset
4. What is an interrupt?
Hardware or software can communicate to micro controller through interrupts. Interrupts
are external signal that controls the micro processor. Interrupt signals are generated by
sources like software programs or hardware controls.
5. What is an Interrupt service routine?
When micro controller is under sudden interrupt, it will call ISR (Interrupt service
routine) that will store the address of current memory address and takes the control to
new interrupt memory address. After the interrupt, the control will transfer back to its
previous address.
6.what are the different addressing modes in 8051?
Direct addressing
Register addressing
Register indirect addressing
Implicit addressing
Immediate addressing
Index addressing
7. Difference between JUMP and CALL instruction?
JUMP: Takes the control to newly specified address.
CALL: Takes the control to newly specified address but control will resume back to its
current address once its call is finished.
Dept. of Electronics &Telecommunication Engineering, B.I.T
28
MICROCONTROLLERS LAB-18ECL47
2019-20
8. Draw the pin diagram of 8051 micro controller?
1) What is the difference between microprocessor and microcontroller?
The microprocessor are general purpose computer with CPU, memory addressing circuit,
interrupt handling circuits and its models vary in data size from 4 to 32 bits.
The microcontrollers are special purpose digital controller with above features of
microprocessor plus it has timer parallel and serial I/O and internal RAM and ROM.
2) Describe the internal Ram of 8051?
The internal RAM of 8051 is generally 128 bytes. It is classified as 4 register banks of 8
registers each. 16 byte addressable at bit level & 8 bytes of general purpose data memory.
3) How many timers are available in 8051?
There are two 16 bit timer/counter option. They are T0 and T1.
4) What are the different control registers in 8051?
The following control register are present in 8051:
TCON, TMOD, SCON, PCON, IP, & IE.
5) How many interrupt sources are made available in 8051?
There are two external & three internal interrupt sources.
Dept. of Electronics &Telecommunication Engineering, B.I.T
29
MICROCONTROLLERS LAB-18ECL47
2019-20
6) Which register of PSW are used to select register bank?
The register R50 and R51 are used to select register bank.
7) Which flag is used in arithmetic instruction?
The overflow flag (OV) is used in arithmetic instruction.
8) Which flag is used for BCD arithmetic?
The auxiliary carry flag is used BCD arithmetic.
9) The carry flag is used for which instruction?
The carry flag is used for arithmetic, jump, rotate and Boolean instruction.
10) What is the position of the port during power on or power reset?
The port P0 to P3 will be high during power ON condition.
11) List the different register priority wise?
The register are listed as per the following ranking based on priority to response an
interfacing.
1) IE0 2) TF0 3) IE1 4) TF1 5) SERIAL (T1 OR R1)
12) Name the features of 8051?
The following are the 3 main features of 8051.
128 byte RAM, $k ON-CHIP ROM and 48 bit I/O ports.
13) What is the major difference between 8051 and 8052 microcontroller?
The 8052 has everything that the 8051 has. It has an extra timer and the on-chip ROM is
8k instead. The RAM in 8052 is 256 byte instead of 128 bytes.
14) List different 8-bit register of 8051?
A, B, R0 TO R7, SP.
15) List 16 bit register of 8051?
DPTR, PC.
16) Why is assembly language caused as low level language?
The assembly language is called as low level language as it directly deals with the
internal structure of CPU.
17) What is a compiler?
Dept. of Electronics &Telecommunication Engineering, B.I.T
30
MICROCONTROLLERS LAB-18ECL47
2019-20
A compiler is a program that translates high level language into machine code.
18) Which directive is used for ASCII string?
The ‘DB’ directive is used for ASCII string.
19) What is the advantage in using the ‘EQU’ directive to define a constant value?
If the value are to be changed later, it can be easily done once in one place instead of
every occurrence.
20) What is the flag register in 8051 called as?
The flag register 8051 is called as program status word i.e., PSW.
21) What is the size of flag register in 8051?
The size of flag register in 8051 is 8 bit.
22) Which bits of the PSW registers are users definable?
D1 and D5 i.e., PSW.1 and PSW.5 are user definable.
23) When is the carry flag (CF) set?
The carry flag is set whenever there is carry out from the d7 bit. This flag is affected after.
24) Is it possible to have immediate data as destination?
No, it is not possible to have immediate data as destination.
25) What should be the number in the register RP?
It must be always the ram address.
26) Which register are used for indirect addressing?
Only register R0 and R1 may be used for indirect addressing.
27) All external data moves must involve which register?
All external data moves must involve the accumulator.
28) How many bytes can register RP address?
Rp can address 256 bytes.
29) How many bytes can DPTR address?
DPTR can address 64k bytes.
Dept. of Electronics &Telecommunication Engineering, B.I.T
31
MICROCONTROLLERS LAB-18ECL47
2019-20
30) What happens to the PC before it is added to A to form the final address of the
code byte?
The PC is incremented by 1 to point to the next instruction.
31) What precaution one has to take to handle the subtract operation?
The carry flag is set to 0 if is not to be included as part of the subtraction operation.
32) Which register bank is used if we alter RS0 and RS1 of the PSW by the
following 2 instruction?
SETB psw.3
SETB psw.4
The register bank 3 is used.
33) Name 16 bit register in 8051?
PC and DPTR.
34) What is the result of the following code and where it is kept?
MOV A, #15H
MOV R2, #13H
ADD A, R2
The result is 28H and is stored in accumulator.
35) In the ADD instruction, when CY is raised?
The CY is raised or set whenever there is a carry out from the D7 bit.
36) In the ADD instruction, when is AC flag set?
If there is a carry from D3 to D4 during an ADD or SUB operation, this bit is set,
otherwise it is cleared.
37) Which flag is used to perform BCD arithmetic?
The AC flag is used to perform the BCD arithmetic.
38) In the 8051, which register bank conflict with the stack?
Bank1.
39) In ‘JZ = NEXT’ which register content is checked to see if it zero?
The accumulator.
Dept. of Electronics &Telecommunication Engineering, B.I.T
32
MICROCONTROLLERS LAB-18ECL47
2019-20
40) What do the mnemonic LCALL and ACALL stand for?
LCALL is termed as Long Call.
ACALL is termed as Absolute Call.
41) Show the instruction to enable EX0 and Timer0 interrupts?
MOV IE, # 1000011b
42) Which pin of the 8051 is assigned to the external hardware interrupt INT?
Port pin P3.3 which is pin 13 on the 40 pin DIP package is assigned as external hardware
interrupt.
43) What address in the interrupt vector table is assigned t the INT1 and Timer1
interrupts?
0013 for INT1 and 001b for timer1.
44) What address in the interrupt vector table is assigned to timer 0?
0000Bh is assigned as address to timer 0.
45) Which bit of IE belong to the Timer interrupt? Show how both are enabled?
Bits D1 and D3 belong to the timer interrupts. They are enabled by the instruction: MOV IE #
10001010b
46) What address in the interrupt vector table is assigned to INT0 and INT1? What at=re
their pin number?
The address are 0003h and 0013h. pins are 12(p3.2) and 13(p3.3).
47) which bit of ie register belong to the external hardware interrupt? Show how both are
enabled.
Bits d0 and d2 belong to the external hardware interrupt and are enabled by the instruction
MOV IE,#10000101B.
48) Assume that IE bit for external hardware interrupt EX1 is enabled and is active low
explain how these interrupt works when it is activated?
Upon application of a low pulse(min 4 machine cycle wide), to pin p3.3, the 8051. is interrupted
in whatever it is doing and jump to ROM location 00BH to execute the ISR.
49) Explain the role that each of the two bits TCON.0 and TCON.2 play in the execution
of external interrupts 0?
Dept. of Electronics &Telecommunication Engineering, B.I.T
33
MICROCONTROLLERS LAB-18ECL47
2019-20
TCON.0 is set to high to make INT0 an edge triggered. If INT 0 is edge triggered(i.e TCON.0
is set ) whenever high to low pulse is applied to the INT0 is latched and kept by the TCON.0
bit by making TCON.2 high. While the ISR for INT0 is being serviced,TCON.2 stays high.
No matter how many times a high to low pulse is applied to pin INT0.
Upon the execution of the last instruction of the ISR, which is RETI the TCON.2 bit is cleared
indicating that the INT0 pin can respond to another interrupt.
50) What address in the interrupt vector table is assign to the serial interrupt?
23H is the address assigned for serial interrupt.
51) How are interrupts better than Polling?
In polling the processor needs to continuously monitor the i/o device whether it is ready or
not. This continuous monitoring of the device may lead to undue waste of time. Whereas the
device may interrupt the processor as and when required ,in the mean time the processor my
carry on with some other piece of work.
52) Explain the working of the enable pin of the LCD
The data written on to the data pins is taken in only when a high to low pulse is given on this
pin or to understand the data written comes into action only when high to low pulse is given.
53) What is the role of SBUF register during serial communication?
Any data that needs to be transmitted or received is passed through the SBUF register. the
data being transmitted is moved to SBUF and the data received through serial communication
is collected in SBUF.
54) A stepper with a step angle of 5 degrees has how many steps per revolution?
a) 144
b) 72
c) 48
d) 24
Answer is 72.
55) What is the total number of steps needed to rotate one complete rotation?
The total number of steps are 180 steps * 20 = 360
56) What is the purpose of LM336 Zener diode around pot setting Vref/2?
The purpose of LM336 Zener diode around pot setting Vref/2 is to overcome any fluctuation
in power supply.
57) LM34 provides __10mv_ __for each degree of _ Fahernheit,_(Fahernheit, Celsius)
temperature.
Dept. of Electronics &Telecommunication Engineering, B.I.T
34
MICROCONTROLLERS LAB-18ECL47
2019-20
58) LM35 provides _10mv__for each degree of _ Celsius __(Fahernheit, Celsius)
temperature.
59) A stepper with a step angle of 7.5 degrees has how many steps per revolution?
a) 144
b) 72
c) 48
d) 24
Answer is 48
60) A stepper with a step angle of 15 degrees has how many steps per revolution?
a) 144
b) 72
c) 48
d) 24
Answer is 24
61) A stepper with a step angle of 2.5 degrees has how many steps per revolution?
a) 144
b) 72
c) 48
d) 24
Answer is 144
62) What will be the order of 4 step sequence of stepper motor if we start with 0110?
a) 1,2,4
b) 4,1,2
c) 1,4,2
d) 2,1,4
Answer is 4,1,2.
63) What will be the order of 4 step sequence of stepper motor if we start with 0011?
a) 1,2,4
b) 4,1,2
c) 1,4,2
d) 2,1,4
Answer is 1,2,4.
64) What will be the order of 4 step sequence of stepper motor if we start with 1100?
a) 1,2,4
b) 4,1,2
c) 1,4,2
d) 2,1,4
Answer is 2,1,4.
Dept. of Electronics &Telecommunication Engineering, B.I.T
35
MICROCONTROLLERS LAB-18ECL47
2019-20
65) What is the direction (out, in) for each of following pins of ADC 808/809.
A) A,B,C
B) SC
C)EOC.
The direction for A,B,C is in, for SC is also in and for EOC is out .
66) In ADC804, the INTR signal is
a) Input Signal
b) Output signal
It is output signal
67) Which pin of ADC804 indicates end of conversion?
a) INTR
b) CS
c) RD
d) Vcc.
The pin of ADC804 which indicates end of conversion is INTR.
68) Which pin of ADC804 indicates start of conversion?
a) INTR
b) CS
c) RD
d) Vcc.
The pin of ADC804 which indicates start of conversion is RD
69) Both the ADC 804 and ADC 808 are ___8____ bit converter
70) For an ADC804 chips, find the step size of Vref values
a) Vref/2 = 1.28 Volt
b) Vref/2 = 1 Volt
The step size for 1.28 Volt is Vref = 2.56/ 256 = 10
The step size for 1Volt is Vref = 2/ 256 = 7.81
71) Is self clocking present in ADC 808/809?
No
72) On what factor speed of conversion depends?
Speed of conversion depends on frequency of clock connected to the clock pin.
73) What is the relation between digital output voltage and analog input voltage and
step size?
Dout = Vin/ step-size.
74) DAC 808 is an __8___ bit D to A Converter
75) To get the full scale output what should be the inputs for DAC?
All inputs are high.
76) Assume that R=5k and Iref= 2mA, calculate Vout for 10011001?
Dept. of Electronics &Telecommunication Engineering, B.I.T
36
MICROCONTROLLERS LAB-18ECL47
2019-20
Iout = 2 mA * 153/ 255 = 1.195 mA.
Vout = 1.195 * 5 = 5.975
77) Assume that R=5k and Iref= 2mA, calculate Vout for 11001000?
Iout = 2 mA * 200/ 256 = 1.562 mA
Vout = 1.562 * 5 = 7.8125.
78) What will be the value of column of keypad matrix if no key is pressed?
The value of column of keypad matrix if no key is pressed is all 1’s
79) To detect the key press which of following is grounded?
A) All rows
B) One row at a time C) both (A) and (B)
Answer is A
80) To identify the key press which of following is grounded?
A) All rows
B) One row at a time C) both (A) and (B)
Answer is B
1.
2.
3.
4.
5.
6.
7.
8.
Intel 8051 follows which architecture: Harvard or Newman?
What is the difference between Harvard and Newman architecture?
8051 was developed using which technology nmos or pmos?
Why 8051 is called 8 bit microcontroller?
What is the width of data bus?
What is the width of address bus?
How many memory locations address bus can access (also tell in kb)?
The memory locations that the address bus can access will be of RAM or ROM or
both?
9. How much on-chip RAM is available?
10. On-chip RAM is also called _____ memory?
11. How much on-chip ROM is available?
12. On-chip ROM is also called _____ memory?
13. How many byte is of the bidirectional input/output port?
14. What is UART?
15. The original 8051 core runs at how many clock cycles per machine cycle?
16. With 12 MHz clock frequency how many instructions(of 1 machine cycle and 2
machine cycle) it can execute per second?
17. What are the four distinct types of memory in 8051?
18. Internal RAM is located from address 0x00 to ___?
19. Tell the addresses which can be accessed directly?
20. Tell the addresses which are bit addressable?
21. Tell the addresses which can be accesssed only by indirect addressing mode?
22. Tell the addresses where the special function registers are present and also which
addressing mode is used to access them?
Dept. of Electronics &Telecommunication Engineering, B.I.T
37
MICROCONTROLLERS LAB-18ECL47
2019-20
23. Are SFR bit addressable or byte addressable?
24. What type of memory is Program Memory? Read only/Read-write/write only?
25. *Does the program memory can be only used for storing code only, if not then how
that data is accessed?
26. What is the address of external data memory from which it starts?
27. How the external data memory is accessed?
28. The internal RAM memory of the 8051 is: 128 bytes
29. This program code will be executed continuously:
STAT: MOV A, #01H
JNZ STAT
30. The 8051 has ___2_____ 16-bit counter/timers
31. The address space of the 8051 is divided into four distinct areas: internal data,
external data, internal code, and external code. True
32. Data transfer from I/O to external data memory can only be done with the MOVX
command. True
33. The 8051 can handle ____5____ interrupt sources.
34. The special function registers are maintained in the next 128 locations after the
general-purpose data storage and stack. True
35. This statement will set the address of the bit to 1 (8051 Micro-controller):
SETB 01H
36. MOV A, @ R1 will: copy the contents of memory whose address is in R1 to the
accumulator
37. A label is used to name a single line of code. True
38. The following program will receive data from port 1, determine whether bit 2 is high,
and then send the number FFH to port 3: True
READ: MOV A,P1
ANL A,#2H
CJNE A,#02H,READ
MOV P3,#FFH
39. Device pins XTAL1 and XTAL2 for the 8051 are used for connections to an external
oscillator or crystal. True
40. When the 8051 is reset and the
line is HIGH, the program counter points to the
first program instruction in the: internal code memory
41. An alternate function of port pin P3.4 in the 8051 is: Timer 0 Both registers TL0 and
TL1 are needed to start Timer 0. False
42. The I/O ports that are used as address and data for external memory are: ports 0 and 2
43. The last 96 locations in the internal data memory are reserved for general-purpose
data storage and stack. False
44. Microcontrollers often have: CPUs, RAM, ROM
45. The 8051 has 4 parallel I/O ports.
46. The total external data memory that can be interfaced to the 8051 is: 64K
47. Which instruction will load the value 35H into the high byte of timer 0? MOV TH0,
#35H
48. Bit-addressable memory locations are: 20H through 2FH
49. The 8-bit address bus allows access to an address range of: 00 to FFH
50. The contents of the accumulator after this operation
MOV A,#0BH
Dept. of Electronics &Telecommunication Engineering, B.I.T
38
MICROCONTROLLERS LAB-18ECL47
2019-20
ANL A,#2CH
will be 00001000
51. The start-conversion on the ADC0804 is done by using the:
52. Which of the following instructions will move the contents of register 3 to the
accumulator? MOV A, R3
53. Which of the following statements will add the accumulator and register 3? ADD A,
R3
54. Data transfer from I/O to external data memory can only be done with the MOV
command. False
55. Which of the following commands will move the number 27H into the accumulator?
MOV A, #27H
56. This program code will read data from port 0 and write it to port 2, and it will stop
looping when bit 3 of port 2 is set: True
STAT: MOV A, PO
MOV P2,A
JNB P2.3, STAT
57. Which of the following commands will move the value at port 3 to register 2? MOV
R2, P3
58. The number of data registers is: 32
59. When the 8051 is reset and the EA line is LOW, the program counter points to the
first program instruction in the: external code memory
60. The designs of a centigrade thermometer and a PWM speed-control circuit can be
implemented by the 8051. True
61. What is the difference between the 8031 and the 8051? The 8031 is ROM-less.
62. The I/O port that does not have a dual-purpose role is: port 1
63. To interface external EPROM memory for applications, it is necessary to demultiplex
the address/data lines of the 8051.
64. The following command will copy the accumulator to the location whose address is
23H:
MOV 23H,A True
65. The special function registers can be referred to by their hex addresses or by their
register names. True
66. The contents of the accumulator after this operation :
MOV A,#2BH
ORL A,00H
will be: 2B H
67. The following program will cause the 8051 to be stuck in a loop: False
LOOP: MOV A, #00H
JNZ LOP
68. Which of the following commands will copy the contents of RAM whose address is in
register 0 to port 1? MOV P1, @ R0
69. The statement CALL READ passes control to the line labeled READ. True
70. Which of the following commands will copy the contents of location 4H to the
accumulator? MOV A, 04H
71. The microcontroller is useful in systems that have nonvariable programs for dedicated
applications. True
72. The total amount of external code memory that can be interfaced to the 8051 is: 64K
Dept. of Electronics &Telecommunication Engineering, B.I.T
39
MICROCONTROLLERS LAB-18ECL47
2019-20
73. The ADC0804 has 8-bit resolution
74. A HIGH on which pin resets the 8051 microcontroller? RST
75. An alternate function of port pin P3.1 in the 8051 is: serial port output
76. Which of the following instructions will move the contents of the accumulator to
register 6? MOV R6, A
77. The following command will rotate the 8 bits of the accumulator one position to the
left: RL A: True
78. An alternate function of port pin P3.0 (RXD) in the 8051 is: serial port input
---------------------xxx---------------------
REFERENCE: Muhammed Ali Mazidi, Janice Gillies Pie Mazidi, “The 8051 Microcontroller
and Embedded Systems”— Pearson EducationAsia.
Dept. of Electronics &Telecommunication Engineering, B.I.T
40