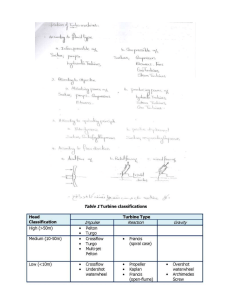
Hydro-Power Module:4 Introduction: The term hydro-power is usually restricted to the generation of shaft power from falling water. The power is then used for direct mechanical purposes or, more frequently, for generating electricity. Other sources of water power are waves and tides. Hydro-power is by far the most established and widely used renewable resource for electricity generation and commercial investment. Hydro-power now accounts for about 20% of world’s electric generation. In about one-third of the world countries, hydro-power produces more than half the total electricity. Hydro installations and plants are long-lasting with routine maintenance, e.g. turbines for about fifty years and longer with minor refurbishment, dams and waterways for perhaps hundred years. Long turbine life is due to the continuous, steady operation without high temperature or other stress. Hydro turbines have a rapid response for power generation. Turbines are of two types: [1] Reaction turbines where the turbine is totally embedded in the fluid and powered from the pressure drop across the device. [2] Impulse turbines, where the flow hits the turbine as a jet in an open environment, with the power deriving from the kinetic energy of the flow Reaction turbine generators may be reversed, so water can be pumped to high levels for storage and subsequent generation at an overall efficiency of about 80%. The main disadvantages of hydro-power are associated with effects other than the generating equipment, particularly for large systems. These include possible adverse environmental impact, effect on fish, silting of dams, corrosion of turbines in certain water conditions, social impact of displacement of people from the reservoir site, loss of potentially productive land (often balanced by the benefits of irrigation on other land) and relatively large capital costs compared with those of fossil power stations. Principles: A volume per second, Q, of water falls down a slope. The density of the fluid is ρ. Thus the mass falling per unit time is Q, and the rate of potential energy lost by the falling fluid is P0 = ρQgH ……………………….. (8.1) where g is the acceleration due to gravity, P0 is the energy change per second (a power measured in Watts) and H is the vertical component of the water path. The purpose of a hydro-power system is to convert this power to shaft power. Unlike some other power sources, there is no fundamental thermodynamic or dynamic reason why the output power of a hydro-system should be less than the input power P0, apart from frictional losses which can be proportionately very small. For a given site, H is fixed and Q can usually be held fairly constant by ensuring that the supply pipe is kept full. Hence the actual output is close to the design output, and it is not necessary to install a machine of capacity greater than normally required. The main disadvantage of hydro-power is also clear from (8.1): the site must have sufficiently high Q and H. In general this requires a rainfall >∼40 cm y-1 dispersed through the year, a suitable catchment and, if possible, a water storage site. Where these are available, hydro-power is almost certainly the most suitable electricity generating source. However, considerable civil engineering (in the form of dams, pipework, etc.) is always required to direct the flow through the turbines. These civil works often cost more than the mechanical and electrical components. Note that the cost per unit power of turbines tends to increase with Q. Therefore for the same power output, systems with higher H will be cheaper unless penstock costs become excessive. Assessing the resource for small installations Suppose we have a stream available, which may be useful for hydro-power. At first only approximate data, with an accuracy of about ±50%, are needed to estimate the power potential of the site. If this survey proves promising, then a detailed investigation will be necessary involving data, for instance rainfall, taken over several years. It is clear from (8.1) that to estimate the input power P0 we have to measure the flow rate Q and the available vertical fall H (usually called the head). For example with Q = 40L s-1 and H = 20 m, the maximum power available at source is 8 kW. This might be very suitable for a household supply. Measurement of head (H) For nearly vertical falls, trigonometric methods (perhaps even using the lengths of shadows) are suitable; whereas for more gently sloping sites, the use of level and pole is straightforward. Note that the power input to the turbine depends not on the geometric (or total) head Ht as measured this way, but on the available head Ha: Ha= Ht -Hf ……….(8.2) where Hf allows for friction losses in the pipe and channels leading from the source to the turbine. By a suitable choice of pipework it is possible to keep Hf <∼Ht/3, but Hf increases in proportion to the total length of pipe, so that the best sites for hydro-power have steep slopes. Measurement of flow rate Q The flow through the turbine produces the power, and this flow will usually be less than the flow in the stream. However, the flow in the stream varies with time, for example between drought and flood periods. For power generation we usually want to know the minimum (dry season) flow, since a turbine matched to this will produce power all the year without overcapacity of machinery. Such data are also necessary for environmental impact, e.g. maintaining a minimum flow for aquatic life. We also need to know the maximum flow and flood levels to avoid damage to installations. The measurement of Q is more difficult than the measurement of H. The method chosen will depend on the size and speed of the stream concerned. where u is the streamwise velocity (normal to the elemental area dA). The methods that follow from each of these equations we call ‘basic’, ‘refined’ and ‘sophisticated’. In addition, if water falls freely over a ledge or weir, then the height of the flow at the ledge relates to the flow rate. This provides a further method to measure flow rate. This provides a further method to measure flow rate. 1 Basic method (Figure 8.2(a)). The whole stream is either stopped by a dam or diverted into a containing volume. In either case it is possible to measure the flow rate from the volume trapped (8.3). This method makes no assumptions about the flow, is accurate and is ideal for small flows, such as those at a very small waterfall. 2 Refined method I (Figure 8.2(b)). Equation (8.4) defines the mean speed u of the flow. Since the flow speed is zero on the bottom of the stream (because of viscous friction), the mean speed will be slightly less than the speed us on the top surface. 3 Refined method II (Figure 8.2(c)). A refinement which avoids the need for accurate timing can be useful on fast flowing streams. Here a float, e.g. a table tennis ball, is released from a standard depth below the surface. The time for it to rise to the surface is independent of its horizontal motion and can easily be calibrated in the laboratory. Measuring the horizontal distance required for the float to rise gives the speed in the usual way. Moreover what is measured is the mean speed. 4 Sophisticated method (Figure 8.1(d)). This is the most accurate method for large streams and is used by professional hydrologists. Essentially the forward speed u is measured with a small flow meter at the points of a two-dimensional grid extending across the stream. The integral (8.5) is then evaluated by summation. 5 Using a weir (Figure 8.2(e)). If Q is to be measured throughout the year for the same stream, measurement can be made by building a dam with a specially shaped calibration notch. Such a dam is called a weir. The height of flow through the notch gives a measure of the flow. The system is calibrated against a laboratory model having the same form of notch. 8.4 An impulse turbine Impulse turbines are easier to understand than reaction turbines, so we shall consider a particular impulse turbine – the Pelton wheel. 8.4.1 Forces The potential energy of the water in the reservoir is changed into kinetic energy of one or more jets. Each jet then hits a series of buckets or ‘cups’ placed on the perimeter of a vertical wheel, as shown in Figure 8.3. The resulting deflection of the fluid constitutes a change in momentum of the fluid. The cup has exerted a force on the fluid, and therefore the fluid has likewise exerted a force on the cup. This tangential force applied to the wheel causes it to rotate. Figure 8.4(a) shows a jet, of density ρ and volume flow rate Qj, hitting a cup as seen in the ‘laboratory’ (i.e. earthbound) frame. The cup moves to the right with steady speed uc and the input jet speed is uj. Figure 8.4(b) shows the frame of the cup with relative jet speed (uj - uc); since the polished cup is smooth, friction is negligible, and so the jet is deflected smoothly through almost 180o with no loss in speed; u2 = uj. Thus in the frame of the cup, the change in momentum per unit time, and hence the force F experienced by the cup, is F = 2ρQj(uj –uc) ……(8.6) (This force is in the direction of the jet.) The power P1 transferred to the single cup is Pj = Fuc = 2ρQj(uj-uc)uc ………. (8.7) where Qj is the flow through the jet. By differentiation with respect to uc . This is maximum for constant uj when uc/uj = 0.5 .......(8.8) So substituting for uc in (8.7) Pj = 1/2 ρ Qjuj2 ……..(8.9) Although the ideal turbine efficiency is 100%, in practice values range from 50% for small units to 90% for accurately machined large commercial systems. For instance, nozzles are adjusted so that the water jets hit the moving cups perpendicularly at the optimum relative speed for maximum momentum transfer. Reaction Turbine It is clear from the fundamental formula (P0 = ρQgH ) that to have the same power from a lower head, we have to maintain a greater flow Q through the turbine. To have a larger flow through the turbine, it is necessary to make a significant change in the design. The entire periphery of the wheel is made into one large ‘slot’ jet which flows into the rotating wheel, as in Figure 8.6(b). Such turbines are called reaction machines’ because the fluid pushes (or ‘reacts’) continuously against the blades. This contrasts with impulse machines, e.g. Pelton wheels, where the blades (cups) receive a series of impulses. For a reaction turbine, the wheel, called the runner, must be adapted so that the fluid enters radially perpendicular to the turbine axis, but leaves parallel to this axis. One design that accomplishes this is the Francis reaction turbine, shown in Figure (b) A larger water flow can be obtained by making the incoming water ‘jet’ almost as large in cross section as the wheel itself. This concept leads to a turbine in the form of a propeller, with the flow mainly along the axis of rotation, figure (c) Moreover, the performance of reaction turbines in general, and the propeller turbine in particular, is very sensitive to changes in flow rate. The efficiency drops off rapidly if the flow diminishes, because the slower flow no longer strikes the blade at the correct angle. It is possible to allow for this by automatically adjusting the blade angle, but this is complicated and expensive. Propeller turbines with automatically adjustable blade pitch are Kaplan turbine. Hydroelectric System A complete hydroelectric system must include the water source, the pipe (penstock), flow control, the turbine, the electric generator, fine control of the generator and wiring for electricity distribution (reticulation). The dam ensures a steady supply of water to the system without fluctuations, and enables energy storage in the reservoir. The supply pipe (penstock) is a major construction cost. It will be cheaper if it is thin walled, short and of small diameter D, but unfortunately it is seldom possible as the diameter cannot be decreased because of the head loss Hf (where Hf ∝ D-5 ). The material of the pipe is required to be both smooth (to reduce friction losses) and strong (to withstand the static pressures, and the considerably larger dynamic ‘water hammer’ pressures ). The turbine speed is designed to be suitable for the electric generator at about 400 V AC. If the turbine speed is not large enough to match the generator, then gearing is used. A V-belt is a common gearing mechanism, which unfortunately may give power losses of 10–20% in very small systems. Power Regulation and Control It is important that the voltage and frequency be controlled to maintain common grid standards and consumer requirements. This is done traditionally by mechanical feedback systems which control the flow through the turbine, so that it maintains constant frequency (‘speed’). For example, with a Pelton wheel, a spear valve is made to move in and out of the nozzle, thus regulating Q. For reaction turbines it is necessary to adjust the blade angles also. All such mechanical systems are relatively complicated and expensive, especially for smaller-scale application. With an electronic load control system, major variations in output are accomplished by manually switching nozzles completely in or out, or by manually controlling the total flow through the turbine. Finer control is achieved by an electronic feedforward control. System Efficiency Even though the efficiency of each individual step is large, there is still a substantial energy loss in passing from the original power P0 of the stream to the electrical output Pe from the generator. Considering the successive energy transformations, we may obtain for small systems The Hydraulic Ram Pump This mechanical hydro-power device is well established for domestic and farm water pumping at remote sites, where there is a steady flow of water at a low level. The momentum of the stream flow is used to pump some of the water to a considerably higher level. Figure 8.9 shows the general layout of a pumping system using a hydraulic ram. The water supply flows down a strong, inclined pipe called the ‘drivepipe’. The potential energy MgH of the supply water is first converted into kinetic energy and subsequently into potential energy mgh. The kinetic energy is obtained by a mass of water M falling through a head H, and out through the impulse valve V1. The efficiency of the device over a period equals mh/MH. Very solid and reliable rams are available commercially. Their efficiency is about 60%. Social and environmental aspects Hydro-power is a mature technology in wide use in many countries of the world: it produces about 20% of the world’s electric power. Most large dams (i.e. those >15m high) are built for more than one purpose, apart from the significant aim of electricity generation, e.g. water storage for potable supply and irrigation, controlling river flow and mitigating floods, road crossings, leisure activities and fisheries. Countering the benefits of large hydro referred to above are adverse impacts; examples are debt burden (dams are often the largest single investment project in a country!), cost over-runs, displacement and impoverishment of people, destruction of important ecosystems and fishery resources. For example, over one million people were displaced by the construction of the Three Gorges dam in China, which has a planned capacity of over 17 000 MW. Some dams have been built on notoriously silt-laden rivers, resulting in the depletion of reservoir volume predictable to all except the constructors and the proponents. Hydro-power, like all renewable energy sources, mitigates emissions of the greenhouse gas CO2 by displacing fossil fuel that would otherwise have been used. However, in some dam projects, in an effort to save construction time and cost, rotting vegetation (mostly trees) have been left in place as dam fills up, which results in significant emissions of methane, another greenhouse gas. However, the installation of small ‘run-of-river’ hydroelectric systems, with only very small dams, is generally considered a positive development.