2858
IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 32, NO. 4, JULY 2017
Robust Operation of Microgrids via Two-Stage
Coordinated Energy Storage and Direct Load Control
Cuo Zhang, Student Member, IEEE, Yan Xu, Member, IEEE, Zhao Yang Dong, Fellow, IEEE,
and Jin Ma, Member, IEEE
Abstract—This paper proposes a robust optimization approach
for optimal operation of microgrids. The uncertain output variation of renewable energy sources (RESs) is addressed by collaboratively scheduling of energy storage (ES) and direct load control (DLC) through a two-stage complementary framework: an
hour-ahead charging/discharging of ES and a quarter-hour-ahead
activation of DLC. The objective is to maximize the total profit
of the microgrid considering operation and maintenance costs of
ES units, wind turbines and photovoltaics, and transaction with
main grid and customer loads. Assuming the power output of RES
randomly varies within a bounded uncertainty set, the problem
is modeled to a two-stage robust optimization model and solved
by a column-and-constraint generation algorithm. Compared with
conventional operation methods, the ES and DLC are coordinated
in different time-scales, and RES uncertainties are fully addressed
during operation decision-making, ensuring the solutions to be optimal and robust for any realization of uncertainty. The proposed
methodology is verified on the IEEE 33-bus distribution system
through a wide range of different tests.
Index Terms—Direct load control, distributed generation, energy storage, microgrid, operation planning, robust optimization.
NOMENCLATURE
A. Sets
Br(i)
Br(i, j)
HQ
Jch , Jdis
ND /W T/PV /ES
NT
T
UW T/PV
B. Parameters
CW T,OM , CPV ,OM
Csell , Cbuy
CD ,con , CD ,unc
CES,ch , CES,dis
E0,m
Er,m
Set of all the branches that connect to
node i.
Branch between node i and j.
Set of all the quarters in the planned
hour.
Manuscript received March 6, 2016; revised June 28, 2016 and August 24,
2016; accepted November 4, 2016. Date of publication November 11, 2016; date
of current version June 16, 2017. The work in this paper was supported in part by
China Southern Power Grid Company through the Project WYKJ00000027, in
part by the Australia-Indonesia Centre under a Tactical Research Project, in part
by the University of Sydney under the Early Career Researcher Development
grant, and in part by University of Sydney Bridging Grant. The work of C. Zhang
is supported by Australian International Postgraduate Research Scholarship
(IPRS), Australian Postgraduate Award (APA). Paper no. TPWRS-00358-2016.
C. Zhang is with the School of Electrical and Information Engineering,
University of Sydney, Sydney, NSW 2006, Australia (e-mail: cuo.zhang@
sydney.edu.au).
Y. Xu is with the School of Electrical and Electronic Engineering, Nanyang
Technological University, Singapore (e-mail: eeyanxu@gmail.com).
Z. Y. Dong is with the School of Electrical Engineering and Telecommunications, The University of NSW, Sydney, NSW 2052, Australia, and also with
China Southern Power Grid Electric Power Research Institute, Guangzhou,
510000, China (e-mail: zydong@ieee.org).
J. Ma is with the School of Electrical and Information Engineering, University
of Sydney, Sydney, NSW 2006, Australia (e-mail: jma@sydney.edu.au).
Color versions of one or more of the figures in this paper are available online
at http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TPWRS.2016.2627583
Set of all the ES charging/discharging levels.
Set of nodes that have loads/wind
turbines/PVs/ES units, respectively.
Number of all the time periods.
Set of all the time periods.
Uncertainty set for wind turbine/PV
output power.
Lch,m ,j , Ldis,m ,j
KD ,con
fc
fc
PW
T,n ,t , PPV ,n ,t
m ax
m ax
, Pdis,m
Pch,m
PD ,con , PD , unc
m in/m ax
m in/m ax
PW T,n ,t , PPV ,n ,t
rated
rated
PW
T,n , PPV ,n
ε
ηch , ηdis
μW T,l , μW T,u ,
O&M cost of wind turbine/PV
($/MWh).
Price for selling/buying electricity
to/from main grid ($/MWh).
Price for selling electricity to controllable/uncontrollable load ($/MWh).
O&M cost of ES during charging/
discharging ($/MWh).
Initial energy stored in ES unit at node
m.
Rated energy which can be stored in
ES unit at node m.
Charging/Discharging power rate (%
of rated power) of ES unit at node m
on level j.
Ratio of controllable load to total load,
same as maximum demand cutting rate
during DLC.
Forecasted output power of wind turbine/PV at node n during period t.
Rated charging/discharging power of
ES unit at node m.
Total controllable and uncontrollable
load demand of microgrid.
Minimum/Maximum foreca-sted output power of wind turbine/PV at node
n during period t.
Rated output power of wind turbine/
PV at node n.
Maximum allowed bound gap.
ES efficiency during charging/
discharging (ES total efficiency,
η = ηch /ηdis ).
Lower/Upper bound of wind
0885-8950 © 2016 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission.
See http://www.ieee.org/publications standards/publications/rights/index.html for more information.
Authorized licensed use limited to: the Leddy Library at the University of Windsor. Downloaded on February 16,2022 at 01:09:51 UTC from IEEE Xplore. Restrictions apply.
ZHANG et al.: ROBUST OPERATION OF MICROGRIDS VIA TWO-STAGE COORDINATED ENERGY STORAGE AND DIRECT LOAD CONTROL
μPV , l , μPV ,u
C. Variables
KDLC,q
PW T,n ,t , PPV ,n ,t
Pb,t , Qb,t
P0,b,t , Q0,b,t
Pdef ,t , Psur,t
PDLC,i,q , QDLC,i,q
Vi,t
αch,m ,j , αdis,m ,j
turbine/PV output uncertainty budget.
Demand cutting rate (% of total demand) for DLC during quarter-hour q.
Uncertain output power of wind turbine/PV at node n during period t.
Active/Reactive power through branch
b during period t.
Active/Reactive power through the lateral branch of branch b during period
t.
Power deficiency/surplus of microgrid
during period t.
Active/Reactive load demand at node i
during hour quarter q under DLC.
Voltage magnitude of node i during period t.
Binary charging/discharging decisions
of ES unit at node m on charging/
discharging level j.
I. INTRODUCTION
ITH large-scale installations of distributed generation,
today’s distribution networks are now evolving from
conventional passive systems to active decentralized systems
such as microgrids. In order to reduce greenhouse gas emissions and alleviate the dependence on fossil fuels, renewable
energy sources (RESs) such as wind and solar are dominantly
adopted in today’s microgrids. However, unlike conventional
controllable fossil-fuel generation, both wind turbines and solar
photovoltaics (PVs) can only generate intermittent, volatile, and
non-dispatchable power, which causes significant difficulties for
microgrid operation [1], e.g. when the outputs of the wind turbines and PVs are excessively high, they may be curtailed; when
they are low, the power from the microgrid itself may not meet
load demands.
To alleviate this problem, [1], [2] suggest integrating energy
storage (ES) into the microgrid to achieve a “time-shifting” of
energy, which allows the redundant energy produced by the wind
turbines and PVs to be saved during low demand periods and
released during peak demand periods. With this energy shifting, the microgrid operator can make more economic profits.
Besides, as discussed in [2], [3], the ES can also provide other
benefits such as mitigating the RES intermittency, improving
power system reliability and so forth. As the price of ES continues to drop, it is now becoming popular to deploy ES in a
microgrid for a better energy management purpose. However,
ES also has clear drawbacks which hinder its effects, such as
limited capacity and reduced lifetime due to frequent charging/discharging operations. In the literature, the ES operation
can be optimized based on historical or predicted RES outputs
[4]–[10]. As the major difficulty caused by RES is the stochastic
power injections, uncertainty analysis and optimization methods
are applied in the ES operation. For example, [11] suggests a
probabilistic approach where different wind power levels are
W
2859
produced with corresponding occurrence probabilities to simulate uncertain conditions. In [12], Monte-Carlo simulations are
utilized to simulate wind power uncertainty data to improve solution robustness. [13] proposes a finite prediction error concept
to involve RES uncertainties, so that the optimization process
can be achieved with predictable RES profiles.
On the other hand, with the increased controllability of the
load in the smart grid, demand response is another solution to
address the uncertainties arisen by RESs [1]. Demand response
program can be classified, based on how load demands are
changed, into price-based demand response and incentive-based
demand response [14], [15]. Among all the demand response
programs, direct load control (DLC) is incentive-based which
directly shuts down the remote controllable and non-essential
equipment such as air conditioners and water heaters, to
maintain the power balance in a microgrid. Thus, DLC has
stronger controllability and can respond faster to mitigate the
uncertainties.
Considering the complementary characteristics of the ES and
the DLC, this paper proposes a two-stage coordinated operation
strategy for robust operation of microgrids in the presence of
uncertain renewable power outputs. In the first stage, ES units
are scheduled to charge/discharge on an hourly basis. The optimization is based on one-hour ahead RES output predictions.
In the second stage, DLC is then scheduled within each hour
to complement the ES operation when the RES outputs deviate
significantly from the prediction. In this strategy, the ES is
operated to manage slow variations in the RES outputs and
for larger economic benefits which DLC cannot achieve alone.
On the other hand, the second stage DLC aims to balance the
power within the microgrid when the outputs of RESs and ES
are deficient, which can overcome the capacity limitation of
ES. Besides, in particular, DLC can be activated in a relatively
short time interval, therefore it can compensate the relatively
long response time of the ES to manage fast RES power
variation.
The proposed collaborative scheduling of ES and DLC strategy is modeled as a two-stage robust optimization (TSRO)
problem. Compared with conventional stochastic programming
techniques which can only provide probabilistic guarantees for
constraint satisfaction [11], [12], robust optimization can obtain an optimal solution within a deterministic uncertainty set
by considering worst cases [16], [17]. In the literature, robust
optimization has been successfully applied for unit commitment [16]–[18], microgrid planning [19], and ES planning [20]
to handle RES uncertainties. However, its application in microgrid operation is relatively limited. In general, robust optimization has three major benefits. Firstly, it only needs modest
data of uncertainty, such as the mean and the range of the uncertain variables. It is a significant advantage, considering that
stochastic optimization is unable to provide reliable solutions
when probability distribution functions are partially available or
not available. Secondly, robust optimization is immune against
any realization of the uncertainty in the uncertainty set. Since
the robust optimization solutions are obtained according to the
worst cases, constraints for all the uncertainty realizations are
satisfied and the solutions are regarded robust. Thirdly, the un-
Authorized licensed use limited to: the Leddy Library at the University of Windsor. Downloaded on February 16,2022 at 01:09:51 UTC from IEEE Xplore. Restrictions apply.
2860
IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 32, NO. 4, JULY 2017
certainty sets support an efficient way in uncertainty modeling
and the robust optimization is computationally efficient, while in
the stochastic optimization, Monte Carlo sampling is very time
consuming. Furthermore, the TSRO can improve the robustness
through the second stage compensation operation.
The major contribution in this paper can be summarized as
follows:
1) A novel coordinated microgrid operation framework is
proposed, which dispatches ES and DLC in different timescales to complement each other towards operational robustness.
2) A TSRO model is developed, which maximizes the total
profit of the microgrid while satisfying operational limits
with any realization of RES uncertainties.
3) A Lagrange-dual based column-and-constraint generation
algorithm is applied to solve the proposed TSRO problem
considering a variety of testing scenarios.
The remainder of this paper is organized as follows.
Section II describes the proposed two-stage microgrid operation strategy through cooperating ES and DLC. Section III
presents the formulation of the microgrid operation optimization problem and Section IV supports the solution methodology of a TSRO. Section V carries out numerical simulations of the proposed optimization with different tests and
demonstrates the results. At last, Section VI concludes the
whole paper.
II. TWO-STAGE COORDINATED MICROGRID OPERATION
A typical microgrid consists of RES units, ES systems, as
well as flexible loads. RESs like wind turbines and PVs can
generate clean and low-cost power, ES units can alleviate energy management difficulties by charging/discharging energy to
make an energy shift, and DLC can contribute in maintaining
power supply and demand balance. Generally, the microgrid operator aims to maximize the total benefits from RES generation,
ES scheduling and DLC, while satisfying the operational limits.
To achieve optimal operation performance of microgrids, this
paper seeks to coordinate ES and DLC to cooperatively handle
RES uncertainties. Based on this, a two-stage operation strategy
is proposed.
It is assumed that ES units are invested and installed at the
same locations with wind turbines and PVs. The ES operates to
charge energy from the wind turbines and PVs, when the wind
turbines and PVs generation exceeds the microgrid load. On the
other hand, energy is discharged from the ES to the network
when necessary, e.g. when the wind turbine and PV outputs
are lower than the load and the electricity price is high. As a
result, the microgrid can decrease the energy purchase from the
main grid, which in turn increases the final profits. Thus, in
the microgrid operation strategy, the ES aims to cooperate with
wind turbine and PV uncertain outputs to maximize the profits
for the microgrid operators.
Since frequent changes of ES states lead to reduced lifetime and increased operation and maintenance (O&M) cost,
ES should operate to change states between charging and discharging at a relatively long interval to minimize its O&M cost
[3]. Considering this characteristic of the ES, in the proposed
Fig. 1.
A two-stage coordinated microgrid strategy.
strategy, the states of ES units are planned in a relatively long
timescale, which is set as one hour ahead in this paper, and ES
units act hourly with the forecasted RES outputs. Within each
operation hour, the states of the ES units are fixed. This ES
operation is regarded as the first stage operation. It is emphasized that the predicted RES outputs according to the weather
forecast can be in a reasonably accurate range, but still vary
randomly from the expectation. Thus, once the uncertain output
power deviates from the prediction heavily within an hour, the
financial benefits may be deteriorated and operational limits of
the microgrid may not be guaranteed.
To operate the microgrid robustly against the uncertain RES
outputs, a second stage operation is designed in this paper, in
which the DLC is implemented to complement the ES operation. As DLC is relatively faster, it can act in a shorter timescale
which is set to one quarter-hour in this paper. It aims to modify
the load demands when the RES outputs have significant deviations from the hour-ahead expected values. A quarter-hour
RES prediction is applied in this stage as well. However, unlike the first stage issue, this prediction accuracy can be much
higher as the prediction lead-time is much shorter, meaning the
uncertainty is much lower. As a result, the power supply of the
ES units and RESs can fulfill the requirement of the responded
load, which results in more profits.
Fig. 1 shows the structure of the proposed two-stage microgrid operation strategy. In the microgrid, RES generation, ES
and responsive loads can coordinate to maximize the operator’s benefits. RES outputs, ES states and load demand data can
be collected by measurement equipment and smart meters and
they are applied in the computation procedure as optimization
parameters. The proposed computation procedure is described
in Sections III and IV. With the operation decisions optimized
from the procedure, ES operates to change charging/discharging
states in the first stage and DLC operates in the second stage.
III. MATHEMATICAL MODELING
The proposed strategy aims to maximize the profit by coordination of ES and DLC and ensures operational constraints
against RES uncertain outputs. The profit is the total revenues
from selling electricity to customers and the main grid minus
the total costs on ES, wind turbine and PV’s O&M and buying electricity from the main grid. In this section, the proposed
Authorized licensed use limited to: the Leddy Library at the University of Windsor. Downloaded on February 16,2022 at 01:09:51 UTC from IEEE Xplore. Restrictions apply.
ZHANG et al.: ROBUST OPERATION OF MICROGRIDS VIA TWO-STAGE COORDINATED ENERGY STORAGE AND DIRECT LOAD CONTROL
two-stage microgrid operation strategy is modeled mathematically with a profit objective and operational constraints.
A. Economic Model of Energy Storage
As discussed above, the ES O&M cost is related to ES charging/discharging states, i.e. the energy ES stores and releases, so
this cost must be considered when the operation is optimized.
In this paper, a practical ES O&M cost model is developed and
applied in the profit maximization.
For the sake of modeling, it is assumed that each ES unit has
a dummy owner which can be the microgrid operator itself or
a private entity in practice. As a result, the microgrid operator
can trade with these ES owners. When an ES unit discharges
power to the network as a generator, the microgrid operator
needs to pay for the electricity. On the other hand, when an ES
unit charges power from the network as a load, the microgrid
operator earns money from the ES owners for selling electricity.
The prices of these two kinds of electricity transaction can be
designed as pricedis ($/MWh) and pricech ($/MWh). pricedis is
positive for the payment and pricech is negative for the revenue
of the microgrid operator.
In [3], all the costs for ES, including the investment cost,
the replacement cost and the charging/discharging cost, can be
transformed into an O&M cost for analysis simplification, expressed as CES,OM ($/MWh). To apply this O&M cost model
in the proposed strategy optimization, this cost is modified and
divided into two parts as CES,dis ($/MWh) and CES,ch ($/MWh)
for discharging and charging electricity respectively, which are
constant. Considering the transaction concept described above,
they can be pricedis and pricech respectively. The following
relationship should be satisfied for cost equality,
CES,dis Edis + CES,ch Ech = CES, OM Estored .
(1)
Considering the characteristics of ES, the following equations
need to be satisfied,
Estored = ηdis Edis = ηch Ech , ηdis > 1, ηch < 1.
(2)
where Estored , Edis , Ech represent the energy stored, the energy
discharged and the energy charged by ES for a cycle, respectively. The cycle means the period starting from some certain
energy being charged and ending in this certain energy being
discharged.
Substituting (2) into (1), we have
CES,ch
CES,dis
+
= CES,OM .
ηdis
ηch
(3)
Thus, CES,dis and CES,ch can be designed by using (3) and the
proposed ES transaction model is developed as above. This ES
economic model is applied in the proposed microgrid operation
optimization.
B. Operation Model of Energy Storage
After the economic model of the ES cost is developed, a
complementary operational model of the ES is developed here.
Considering that the operation states of the ES units are fixed
during the planned hour in the first stage, a discrete charging/discharging model is developed in this paper.
2861
In this model, the maximum output power an ES unit can generate at a node, i.e. the maximum discharging power, is divided
into several levels (10 levels in this paper simulation). Each level
represents a percentage of the maximum discharging power –
this is aligned with industry-grade ES discharging controller
which needs a set-point to control the discharging level. For
the sake of the optimization purpose, a binary decision variable
is used to denote each level: 1 for the ES unit discharging the
corresponding power of the level, and 0 for no operating. Thus,
for a specified ES unit at the node m, the planned discharging
power is calculated as follows,
m ax
αdis,m ,j Ldis,m ,j .
(4)
PES,dis,m = Pdis,m
j ∈J d i s
Similarly, several levels (e.g. 10) for charging power of each
ES unit are derived and their corresponding binary decision
variables are defined. The planned charging power of the ES
unit at the node m is derived as
m ax
αch,m ,j Lch,m ,j .
(5)
PES,ch,m = Pch,m
j ∈J c h
With these binary variables and the pre-designed charging/discharging levels, this operational model can be optimized
to decide the ES charging/discharging power to maximize the
profit with the proposed ES economic model.
C. Operation Model of Direct Load Control
A profit-based DLC derived by [21] is used to coordinate
with the first stage ES operation and to compensate profits for
the microgrid operator in the second stage. In this model, the
total loads can be divided into two groups, controllable loads,
i.e. DLC loads and uncontrollable loads.
The ratio of the controllable loads to the total loads is
PD ,con
.
(6)
KD ,con =
PD
This ratio also represents the maximum percentage of the
load demands which can be controlled. Thus, the fixed and
uncontrollable load demands can be calculated as
PD ,unc = (1 − KD ,con ) PD .
(7)
During a certain hour quarter of DLC, the controllable loads
can be cut off by a cutting percentage, KDLC,q . It aims to keep
the microgrid power independently balanced as much as possible with assisting the ES operation. Besides, during this process
of optimizing KDLC,q , the total profit can be maximized by modifying the transaction with the main grid. In this paper, KDLC,q
is a continuous and adjustable variable optimized in the second
stage. However, this variable can also be discrete when loads
are clustered (say, loads can be clustered into several groups,
e.g. several houses can have only one DLC switch). Therefore,
the load demand during DLC for each node can be calculated
as
PDLC,i,q = (1 − KDLC,q ) PD ,i , ∀i, q.
(8)
Assume that for each node, the power factor is fixed. Thus,
the reactive power of each node during DLC is expressed as
QDLC,i,q = (1 − KDLC,q ) QD ,i , ∀i, q.
(9)
Authorized licensed use limited to: the Leddy Library at the University of Windsor. Downloaded on February 16,2022 at 01:09:51 UTC from IEEE Xplore. Restrictions apply.
2862
IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 32, NO. 4, JULY 2017
The controllable loads can be cut off by remote switches
with the help of smart meters. During the DLC, these customers
with the cut-off loads can use limited power, even no power.
Normally, to make up the loss for the controllable load customers, the microgrid operator offers a lower electricity price,
i.e. DLC load price CD ,con for these customers than the normal
price CD ,unc for the customers of the uncontrollable loads. The
microgrid operator can reset CD ,con to modify the number of
the customers who agree to join in the DLC group [21]. For
example, the microgrid operator can reduce CD ,con to involve
more loads as controllable loads with the customers’ agreement, so that more loads can be cut off for the modifying load
demands purpose. However, considerably surplus controllable
loads mean a much lower overall revenue from the customers,
since the DLC load price is much lower. Thus, the microgrid
operator should design the DLC load price based on the cautious
expectation of the DLC capacity.
m in
m ax
PW
T,n ,t ≤ PW T,n ,t ≤ PW T,n ,t , ∀n, t
(20)
m in
m ax
PPV
(21)
,n ,t ≤ PPV ,n ,t ≤ PPV ,n ,t , ∀n, t
m ax
αch,m ,j Lch,m ,j
Pb+1,t = Pb,t − P0,b+1,t − Pch,m
m ax
+ Pdis,m
j ∈J c h
αdis,m ,j Ldis,m ,j − PDLC,i,q
j ∈J d i s
+ PW T,n ,t + PPV ,n ,t , b ∈ Br (i) , ∀i, t, q
(22)
Qb+1,t = Qb,t − Q0,b+1,t − QDLC,i,q , b ∈ Br (i) , ∀i, t, q
(23)
Vi+1,t = Vi,t −
Rb Pb,t + Xb Qb,t
, b ∈ Br (i, i + 1) , ∀i, t
V0
(24)
PDLC,i,q = (1 − KDLC,q ) PD ,i , ∀i, q
(25)
D. Optimization Model of Microgrid Operation
QDLC,i,q = (1 − KDLC,q ) QD ,i , ∀i, q
(26)
The objective is to maximize the total profit of the microgrid
considering O&M costs o ES units, wind turbines and PVs,
transaction with main grid and loads. The objective and constraints are formulated as follows,
1 − V m ax ≤ Vi,t ≤ 1 + V m ax , ∀i, t
(27)
P1,t = Pdef ,t − Psur,t , Pdef ,t ≥ 0, Psur,t ≥ 0, ∀t
(28)
(10)
min CES + CW T + CPV + Cgrid − Crev
m ax
s.t. CES = CES,ch
Pch,m
αch,m ,j Lch,m ,j
+ CES,dis
m ∈N E S
m ax
Pdis,m
m ∈N E S
j ∈J c h
αdis,m ,j Ldis,m ,j
(11)
j ∈J d i s
PW T,n ,t
NT
CW T = CW T,OM
(12)
n ∈N W T t∈T
CPV = CPV ,OM
PPV ,n ,t
NT
(13)
n ∈N P V t∈T
Cgrid = Cbuy
Pdef ,t
t∈T
NT
− Csell
Psur,t
t∈T
Crev = CD ,unc (1 − KD ,con )
NT
(14)
PD ,i
i∈N D
+ CD ,con
(KD ,con − KDLC,q )
q ∈HQ
PD ,i
4
αch,m ,j ∈ {0, 1} , αdis,m ,j ∈ {0, 1} , ∀m, j
αch,m ,j + αdis,m ,j ≤ 1, ∀m
j ∈J c h ∪J d i s
m ax
− E0,m ≤ ηch Pch,m
m ax
− ηdis Pdis,m
(15)
i∈N D
(16)
(17)
αch,m ,j Lch,m ,j
j ∈J c h
αdis,m ,j Ldis,m ,j ≤ Er,m − E0,m , ∀m
j ∈J d i s
(18)
0 ≤ KDLC,q ≤ KD ,con , ∀q
(19)
The objective function (10) considers all the costs and the
revenues during the microgrid operation. Equations (11)–(15)
are the calculation functions of these costs and revenues, i.e. the
O&M costs of the ES, wind turbine and PV respectively, the
transaction with the main grid including the electricity payment
and the electricity revenue, and the revenue of selling electricity to the demand customers. The objective is to maximize the
profit, which is equivalent to minimize the total costs minus the
total revenues. Constraint (16) describes the first stage decision
variables for the ES operations are binary for all the charging/discharging levels. Constraint (17) guarantees that only one
charging/discharging level is planned to be operated for each ES
unit. Constraint (18) limits the maximum charging/discharging
power of each ES unit with the consideration of the battery efficiency. Constraint (19) expresses the allowed range of the load
cutting during DLC. Constraints (20) and (21) describe that due
to the uncertain nature of the wind and solar power, the outputs
of the wind turbines and PVs vary randomly in the ranges of the
forecasted lower and upper bounds. Constraints (22)–(24) are
the linearized distribution load flow (Dist-Flow) equations. The
Dist-Flow model is originally proposed in [22] and linearized in
[23]. It has been proved efficient for microgrid modeling [19].
Note that the power loss is not considered here since compared
with the other cost terms in (10) it is minor to make a notable
difference. Moreover, its inclusion may introduce non-linear
terms and add difficulty for developing numerical algorithm.
Equations (25) and (26) represent the load demands during each
quarter of the hour with the consideration of the planned DLC.
Constraint (27) guarantees the voltage magnitude of each node
is kept within the allowed maximum deviation from the nominal value. Constraint (28) denotes the relationship between the
power flow from the main grid and transacted electricity, where
P1,t means the power transformed from the main grid to the
microgrid. It is noted that Pdef ,t > 0 means the microgrid buys
Authorized licensed use limited to: the Leddy Library at the University of Windsor. Downloaded on February 16,2022 at 01:09:51 UTC from IEEE Xplore. Restrictions apply.
ZHANG et al.: ROBUST OPERATION OF MICROGRIDS VIA TWO-STAGE COORDINATED ENERGY STORAGE AND DIRECT LOAD CONTROL
electricity from the main grid and Psur,t > 0 means the microgrid sells electricity to the main grid. Note that the first stage
ES operation acts hourly and the operation time is set to 1 hour.
Thus, the first stage time summation is 1 hour and it can be
hidden in (11), (15) and (18).
Equations (10)–(28) make up a mixed-integer linear programming (MILP) with uncertain variables. Herein, the ES charging/discharging operations are the first stage decisions and the
DLC cut-off rates are the second stage decisions in this twostage optimization problem.
IV. ROBUST COORDINATION MODEL
In order to make the solutions robust against the uncertain
RES output power, a TSRO model is developed to coordinate
the ES and DLC in the different time-scales.
A. Two-Stage Robust Optimization Model
In the robust optimization modeling, uncertain variables are
searched first within uncertainty sets to form a worst case and
then these variables are fixed and applied in optimization as
parameters. The solution obtained with the worst uncertainty
case is robustly optimal for all the possible uncertainty cases
produced by the uncertainty sets, thus all uncertainty cases are
fully addressed during the optimization.
The proposed microgrid operation model is converted to a
TSRO model, which can be formulated in the following compact
matrix form:
min cT x + max min dT y + eT u
(29)
s.t. Ax ≥ b
(30)
x
u
y
y ∈ O (x, u) = {F x + Gy ≤ v, Hx + Iy + Ju = w} (31)
u∈U
(32)
The objective described in (29) is modeled in a “min-maxmin” optimization form. The first “min” is to minimize the first
stage costs by optimizing the first stage variable set x. The “max”
is to find the worst uncertainty case u in the given uncertainty set
U by maximizing the minimization of the second stage objective.
The second “min” is to minimize the second stage costs by
optimizing the second stage variable set y. It can be seen that the
worst case from the uncertainty set is obtained by maximizing
the minimal second stage costs, which guarantees the solution
robustness.
The three types of variables at different stages are classified
as follows.
1) x represents a set of decision variables in the first stage
operation which are not subject to the uncertain variables
or the adjustment variables in the second stage. Considering the unadjustable characteristic of these decision
variables, they can be regarded as the “here-and-now”
decisions. In the proposed strategy model formulated in
Section III-D, x indicates the vector of the binary variables
for all the ES operation levels, i.e. αch and αdis . Besides,
their constraints (16)–(18) are grouped in (30).
2863
2) y stands for a group of adjustable variables in the second
stage including the quarter-hour ahead DLC controllable
variables, KDLC and dependent variables, P, Q, V. Herein,
KDLC for each quarter hour can be optimized in the second stage after the realization of the uncertain variables,
and they are referred as the “wait-and-see” decisions. Constraint (31) indicates that y must be adjusted in the feasible
set, O(x, u) which is based on the first-stage decision variable set x and any single case of uncertainty variable group
u. O(x, u) is defined by constraints (19), (22)–(28).
3) u stands for the uncertainty variables which are the outputs of the wind turbines and the PVs, i.e. PW T and PPV .
Constraint (32) means that with the predicted wind and
solar power, the uncertain variables vary in uncertainty
sets which support the worst case during the robust optimization process. In other words, with (32) as the constraint, the minimization of the second stage objective is
maximized. The uncertainty sets are made up by allowed
uncertain ranges for uncertainties and they limit the uncertainties to make the optimization problem practical. In
this paper, two polyhedral uncertainty sets are formulated
for the wind and solar power respectively as follows,
UW T = {PW T,n ,t ∈ Rn w t :
PW T,n ,t
1
μW T,l μW T,u ,
fc
nn nt
PW
T,n ,t
n ∈N
t∈T
WT
m in
PW
T,n ,t
m ax
PW T,n ,t PW
T,n ,t , ∀n, t},
(33)
UPV = {PPV ,n ,t ∈ Rn p v :
PPV ,n ,t
1
μPV ,l μPV ,u ,
fc
nn nt
PPV
,n ,t
n ∈N
t∈T
PV
m in
PPV
,n ,t
m ax
PPV ,n ,t PPV
,n ,t , ∀n, t}.
(34)
m in
m ax
m in
m ax
PW
T,n ,t , PW T,n ,t , PPV ,n ,t , PPV ,n ,t are forecasted generation
interval (lower and upper bounds) of the wind turbine and PV
outputs at a node n during a period t. They can be obtained
from interval forecasting tools [24]. These bounds represent the
constraints (20) and (21) for each single uncertain variable. In
practice, they are obtained from the hour-ahead forecasts.
Furthermore, a budget of uncertainty is a user-defined parameter in pair of μl and μu to limit the overall uncertainty. They are
lower and upper bounds of a summation of the ratios between
the actual RES outputs and the forecasted outputs, averaged by
the total numbers of periods nt and RES units nn . This pair is
an indicator for measuring the uncertainty caused by inaccurate
wind and PV generation forecasting. For example, if both μl
and μu are 100%, it means that the overall hourly forecast is
accurate. Otherwise, it means the overall hourly forecast has
an average accuracy between μl and μu . This budget should
be designed considering a few aspects such as the historical
data (e.g. the accuracy statistics of the forecasting tools) and the
expectation of the solution robustness. For example, it should
have a larger range to improve the robustness if heavy uncertainties are predicted to occur. Besides, if the budget is not set up
large enough, realization of the uncertainties may be out of the
Authorized licensed use limited to: the Leddy Library at the University of Windsor. Downloaded on February 16,2022 at 01:09:51 UTC from IEEE Xplore. Restrictions apply.
2864
IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 32, NO. 4, JULY 2017
uncertainty sets and the robustness may not be ensured which
may lead to reduced profits and/or violation of the limits. It is
emphasized that the budget is enlarged when μl falls and μu
rises, so that the final optimization solutions are robust against
more uncertain cases but will be more conservative (i.e. less
profits). Therefore, its value should be designed by the operator with consideration of the balance between robustness and
conservativeness.
It should be noticed that, the “wait-and-see” decisions which
can be adjusted in the second stage can improve the objective
value when the worst case does not occur. In other words, the
worst-case-based profit may be improved by the second stage
decisions according to the realization of the uncertainty so that
the conservativeness can be reduced.
According to the characteristics of the “min-max-min” form
and its corresponding variables, the proposed two-stage optimization objective (10) can be rewritten in a TSRO form as the
following,
min CES +
α d i s ,α c h
max
min
P W T ,P P V K D L C ,V ,P ,Q ∈O
CW T + CPV
+ Cgrid − Crev .
(35)
It can be seen that the O&M cost of the ES units are minimized
by the binary decision variables αch and αdis in the first stage,
while the other economic terms are optimized by the adjustable
variable KDLC with the uncertainty variables PW T and PPV
in the second stage. In addition, the ES operation decisions are
the optimized solutions for the hour-ahead microgrid operation
planning, and the DLC decisions are modified further based on
the quarter-hour ahead RES forecasts during the planned hour.
B. Column-and-Constraint Generation (C&CG) Algorithm
To solve a TSRO problem, two decomposition methodologies
are widely applied for unit commitment problems and planning
problems. One is an Benders decomposition with dual-cutting
[16] and the other one is using a column-and-constraint generation (C&CG) algorithm to solve TSRO problems which can
be regarded as a primal cutting plane algorithm [25]. It is concluded in [25] that the convergence speed of C&CG is much
faster than that of Benders decomposition. Therefore, C&CG is
applied in this paper.
In C&CG algorithm, the TSRO problem is divided into a
master problem and a slave one which can formulate the first
and the second stages respectively.
The master problem is,
min cT x + λ
(36)
s.t. Ax ≥ b,
(37)
λ ≥ dT yl∗ + eT u∗l , ∀u∗l ∈ S,
(38)
x
Fx +
Gyl∗
≤ v,
Hx + Iyl∗ + Ju∗l = w, ∀u∗l ∈ S.
(39)
(40)
Since in the proposed planning model, x is a set of binary
decision variables, the master problem is a MILP. In this problem, an optimal solution can be derived as (x∗ , λ∗ ) with a set of
fixed uncertainty variables u∗l obtained from the slave problem.
It is denoted that the solution, x∗ is the current optimal solution
of the first-stage planning and it is used for solving the slave
problem. In addition, yl∗ corresponding to each uncertainty result is optimized as well. But, it is emphasized that only the
final x∗ which is the “here-and-now” decision is optimized as
the final planning solution, since other decision variables treated
as “wait-and-see” decisions can be modified further during the
planning hour.
On the other hand, a slave problem is expressed as,
S (u, x∗ ) = max min dT y + eT u
(41)
s.t. F x∗ + Gy ≤ v,
(42)
Hx∗ + Iy + Ju = w,
(43)
u ∈ U.
(44)
u
y
It is noticed that exactly solving the slave problem is significantly challenging with a polyhedral uncertainty set [25]. To
solve the slave problem, the authors of [16] applied an outer
approximation approach; in [18], a strong duality of the slave
problem is utilized to produce a bilinear problem; furthermore,
[25] suggested to use Karush-Kuhn-Tucker conditions and a
big-M constraints approach to transfer the bilinear problem into
a MILP.
In this paper, the classic Lagrange dual is proposed to make
a strong duality. Thus, the “max-min” form optimization is
changed into a bilinear maximization problem as the follows,
max (F x∗ − v)T ϕ + (w − Hx∗ − Ju)T ρ + eT u
(45)
s.t. GT ϕ − I T ρ + d = 0, ϕ ≥ 0, ρ free.
(46)
u ,ϕ,ρ
Here ϕ and ρ are the dual variables of the second stage variables y, this duality can be solved by non-linear and bilinear
solvers such as SCIP [26]. By maximizing the duality, the worst
case is searched with a corresponding uncertainty variable u∗
as a slave problem solution. Besides, u∗ is added into a slave
solution set S, for the master problem. After solving the slave
problem, new second-stage variables are generated and supported with their constraints (38)–(40) together to the master
problem.
The implemented C&CG algorithm in this paper is shown in
Fig. 2.
V. NUMERICAL RESULTS
A. Test System
In this paper, an IEEE 33 bus radial distribution system is applied to demonstrate the proposed approach. The system topology is shown in Fig. 3 and its data are obtained from [27]. The
voltage level is 12.66 kV with an allowed maximum voltage deviation as 0.05 p.u. The rated power and energy data for the ES
units, wind turbines and PVs used in the case study are shown
in Tables I and II. Note that optimal placement of distributed
generation is out of the scope of this paper. A recent reference and related literature review can be found in [28]. The ES
units modeled in this paper can be Zn/Br battery sets which are
Authorized licensed use limited to: the Leddy Library at the University of Windsor. Downloaded on February 16,2022 at 01:09:51 UTC from IEEE Xplore. Restrictions apply.
ZHANG et al.: ROBUST OPERATION OF MICROGRIDS VIA TWO-STAGE COORDINATED ENERGY STORAGE AND DIRECT LOAD CONTROL
2865
TABLE III
PARAMETERS FOR MICROGRID OPERATION TESTS
Parameter
Value ($/kWh)
Parameter
Value ($/kWh)
0.015
0.07
0.06
0.1
C ES,dis
C ES,ch
C WT,OM
C PV,OM
0.051
−0.02
0.01
0.01
C sell
C buy
C D, con
C D, unc
TABLE IV
UNCERTAINTY BUDGET SETS UNDER TESTS
Fig. 2.
C&CG algorithm.
Test No
1
2
3
4
5
6
μ WT, l
μ WT, u
μ PV, l
μ PV, u
95%
105%
97.5%
102.5%
90%
110%
95%
105%
85%
115%
92.5%
107.5%
80%
120%
90%
110%
75%
125%
87.5%
112.5%
70%
130%
85%
115%
TABLE V
SOLUTION RESULTS FOR BASE CASE UNDER DIFFERENT UNCERTAINTY SETS
Test No
ES Discharging
Fig. 3.
ES 1
ES 2
ES 3
ES 4
DLC under
0–15 min
Worst Case
15–30 min
30–45 min
45–60 min
Profit under Worst Case ($)
Iteration Number
Solution Time (s)
Test microgrid topology.
1
2
3
4
5
6
0%
0%
20%
30%
0%
46%
0%
3%
192.39
5
61.39
10%
0%
20%
20%
0%
0%
0%
6%
187.94
5
15.96
0%
10%
40%
20%
0%
43%
0%
2%
184.45
3
12.04
10%
0%
20%
30%
0%
39%
0%
2%
179.86
3
13.84
10%
0%
40%
30%
0%
38%
31%
0%
177.30
3
18.34
10%
0%
40%
30%
0%
38%
0%
0%
174.29
2
7.01
TABLE I
ES DATA
ES ID
Node No
Rated Stored Energy (MWh)
Rated Power (MW)
2
1
1
1
1.5
1
1
1
1
2
3
4
6
18
24
32
Charging Efficiency η c h
Discharging Efficiency η d i s
0.9
1.2
B. Initial Tests
TABLE II
RES DATA
Wind Turbines Data
Node No
6
18
24
This simulation is conducted on a 64-bit PC with 3.30-GHz
CPU and 8 GB RAM using Yalmip [29] toolbox in the MATLAB
platform. Both the bilinear slave problem and the MILP master
problem are solved by SCIP solver [26]. The terminal gap of
the robust optimization is set as 0.01.
PVs Data
Rated Power (MW)
Node No
Rated Power (MW)
2
1
1
18
24
32
0.5
0.5
0.5
commonly applied in practical distribution networks, since they
have low O&M costs and relatively high efficiency [3]. Table III
lists the economic parameters for the microgrid operation and
the average transaction price.
A base system state is considered for the initial tests. The base
state has a relatively low energy storage as 1.4 MWh stored in
total, 35% of the wind turbine rated power, 90% of the PV
rated power and 100% of the load demand indicating a peak
hour condition. For this system state, a range of different budget
sets are considered, which are listed in Table IV. For the six
uncertainty sets, six corresponding tests are implemented by
using the C&CG algorithm to solve the TSRO model.
The six initial tests results are given in Table V which shows
the ES discharging status at the first stage, the DLC results under
the worst case, the profit under the worst case, the iteration
number and solution time.
Taking Test 1 as an example, see the second column of
Table IV, μW T,l and μW T,u are the lower and upper budget
bounds for wind turbine uncertain output respectively, which
means the average forecast accuracy ratio of the actual wind
Authorized licensed use limited to: the Leddy Library at the University of Windsor. Downloaded on February 16,2022 at 01:09:51 UTC from IEEE Xplore. Restrictions apply.
2866
IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 32, NO. 4, JULY 2017
TABLE VI
SYSTEM STATES FOR COMPREHENSIVE TESTS
Test No
Fig. 4.
Load
Demand (%)
ES Stored
Energy (MWh)
Wind Turbine
Output Rate (%)
PV Output
Rate (%)
100%
100%
100%
100%
100%
100%
100%
100%
50%
50%
50%
50%
50%
50%
50%
50%
2.7
2.7
2.7
2.7
0.8
0.8
0.8
0.8
2.7
2.7
2.7
2.7
0.8
0.8
0.8
0.8
95%
25%
95%
25%
95%
25%
95%
25%
95%
25%
95%
25%
95%
25%
95%
25%
90%
90%
10%
10%
90%
90%
10%
10%
90%
90%
10%
10%
90%
90%
10%
10%
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
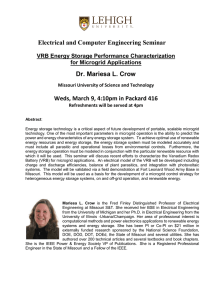
Illustration of the worst case in wind turbine uncertainty set.
power to the forecasted one can vary between 95% and 105%,
and μPV , l and μPV ,u are those for PV output.
For the illustration purpose, under this uncertainty set, the
predicted wind power output, the uncertain range, and the calculated worst case by the TSRO of the wind turbine at Node 6
are shown in Fig. 4. Note that the uncertainty range is set up
as the grey area based on the forecasted value with the allowed
maximal deviation and the red curve presents this worst case
found in the solution process. The worst case corresponds to
maximizing the minimization of the second stage objective, i.e.
“max-min”. It can be seen that the uncertainty variable of each
period reaches the boundaries for this uncertainty budget. However, it is found that the uncertainty variables may not always
lay at the boundaries for other uncertainty budgets.
With this uncertainty budget, the ES operation states,
i.e. discharging rates, are shown in the second column of
Table V and they are the two-stage strategy hour-ahead decisions. The ES units are planned to act these operation states in
the following hour. Besides, under the worst case, the DLC 15min decisions, i.e. the controllable load cutting rates, are also
given. It is emphasized that the actual decisions are optimized
15-min ahead with the realization of the uncertainties and taken
into effect for the corresponding 15-min interval. The profit under the worst case is calculated as well, but note that the actual
profit would be calculated according to the actual DLC and the
realization of the uncertainties.
According to the solution results for the other five uncertainty
sets, it can be seen that as the uncertainty size increases, the optimal solutions are more conservative. In Table IV, it is demonstrated that from Test 1 to Test 6, the budget size is enlarged, as
a result, the overall profit decreases. For a large budget robust
optimization, although the expected profit is relatively low, the
solution can fit more uncertain conditions, which means more
robust. Thus, it is noted that for increasing robustness purpose, a
large uncertainty size can be selected by the microgrid operator
to plan the ES hour-ahead operation, and a slightly conservative
but more robust planning solution can be prepared for operation.
However, with more accurate predictions of wind speeds and solar irradiance given by modern weather forecasting systems, a
relatively small uncertainty budget size can be enough.
In terms of solution efficiency, all the solutions are obtained
within 5 iterations. Besides, the minimal solver time is only
System States
TABLE VII
ES OPERATION PLANNING RESULTS
Test No
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
Operation States, % of Rated Power
ES 1
ES 2
ES 3
ES 4
0%
−50%
0%
−50%
0%
−20%
0%
−20%
60%
−10%
10%
−10%
0%
−10%
10%
−20%
20%
−10%
0%
−30%
20%
−20%
0%
−20%
60%
20%
40%
−10%
60%
20%
30%
−10%
0%
−50%
0%
−50%
0%
0%
0%
0%
40%
0%
40%
−50%
40%
0%
0%
0%
0%
0%
0%
−50%
0%
0%
0%
0%
10%
0%
0%
−10%
100%
0%
50%
0%
Iteration
Solution Time (s)
4
3
3
3
4
2
3
2
3
3
4
4
3
3
5
3
21.82
11.72
10.22
13.34
26.13
23.47
10.35
1.87
3.54
3.39
8.87
8.47
9.01
3.49
24.22
2.97
7.01 seconds, the maximal one is only 61.39 seconds and the
average one is 21.43 seconds, which is feasible for the hourahead optimization. In practice, for extra larger systems, more
powerful solvers can be used to further speed up the solution
process.
C. Comprehensive Tests
To comprehensively examine the proposed methodology, a
range of different load/ES/RES system states are tested here.
These system states make up 16 tests and they are shown in
Table VI. For the uncertainty sets of robust optimization, 0.9
and 1.1 are set as the lower and upper budget bounds for the
wind turbine output, while 0.95 and 1.05 are for PV output.
Table VII demonstrates the robust optimization solutions of
the proposed microgrid operation for all the 16 tests. For the ES
operation states, negative values stand for discharging power
Authorized licensed use limited to: the Leddy Library at the University of Windsor. Downloaded on February 16,2022 at 01:09:51 UTC from IEEE Xplore. Restrictions apply.
ZHANG et al.: ROBUST OPERATION OF MICROGRIDS VIA TWO-STAGE COORDINATED ENERGY STORAGE AND DIRECT LOAD CONTROL
and positive values for charging power during the planned hour.
It is seen that for the high wind turbine and PV output tests (1,
5, 9 and 13), some ES units are planned to be charged since the
power supply is greater than the load demands. It can also be
noticed that during the off-peak period, more energy is charged
into the ES units with the adequate power supply, from the Tests
9 and 13. The results of Tests 11 and 15 show that although
the PV outputs are low, the ES units are charged as well due
to sufficient power supply generated by the wind turbines to
the only half demands. Besides, when the wind turbine output
levels are low (Tests 2, 4, 6, 8, 12 and 16), some ES units
are planned to be discharged, for the wind turbines are main
distributed generators in the microgrid and the power supply
is insufficient. For Tests 10 and 14, No.1 ES is discharged but
NO.2 ES is charged, because the power unbalance conditions in
the areas around Buses 6 and 18 are quite different. To keep all
the voltages within the allowed range, these two ES are operated
differently. Last but not least, it is noted that for Tests 3 and 7,
the ES units are not to be operated, since the power is almost
balanced and the unbalance for some certain periods can be
solved by the DLC and the power flow from the main grid.
Furthermore, the iteration number and the solution time are
shown in Table VII as well. The average time is 11.43 seconds,
which again demonstrates the high solution efficiency of the
algorithm.
VI. CONCLUSION
This paper developed a novel approach to plan a cooperation of ES and DLC in microgrids by applying a TSRO with
consideration of uncertain renewable energy. In the proposed
microgrid operation strategy, the ES states are optimized to
charge or discharge power an hour ahead in the first stage operation and an assistant quarter-of-hour-ahead DLC is applied in
the second stage to make power balanced and profits maximum.
The optimization objective is to maximize the microgrid profits
on the revenues from the customers after covering the O&M
costs of ES units, wind turbines and PVs and the transaction
with the main grid. The TSRO is solved by C&CG algorithm
with the polyhedral uncertainty sets. In the robust optimization,
the uncertain nature of the wind and solar power is fully involved through the uncertainty sets and the worst cases given
by the uncertain variables are generated and used to make the
final solution robust for all the uncertain conditions. The proposed planning methodology is verified on a 33-bus microgrid
network with different specific tests and the characteristics of
the uncertainty budgets are analyzed. The tests results indicate
the good robustness and efficiency of the two-stage coordinated
microgrid operation strategy. It is concluded that the proposed
two-stage ES and DLC coordination strategy is suitable for
practical microgrid operation planning.
REFERENCES
[1] P. Denholm, E. Ela, B. Kirby, and M. Milligan, “The role of energy storage
with renewable electricity generation,” Nat. Renew. Energy Lab., Golden,
CO, USA, NREL Rep. TP-6A2-47187, 2010.
[2] A. Nasiri, “Integrating energy storage with renewable energy systems,” in
Proc. 34th Annu. Conf. IEEE Ind. Electron., 2008, pp. 17–18.
2867
[3] P. Poonpun and W. T. Jewell, “Analysis of the cost per kilowatt hour to
store electricity,” IEEE Trans. Energy Convers., vol. 23, no. 2, pp. 529–
534, Jun. 2008.
[4] S.-H. Jang, J.-B. Park, J. H. Roh, S.-Y. Son, and K. Y. Lee, “Short-term
resource scheduling for power systems with energy storage systems,” in
Proc. IEEE Power & Energy Soc. General Meeting, 2012, pp. 1–7.
[5] S. Lakshminarayana, T. Q. Quek, and H. V. Poor, “Combining cooperation
and storage for the integration of renewable energy in smart grids,” in Proc.
IEEE Conf. Comput. Commun. Workshops, 2014, pp. 622–627.
[6] M. Ross, R. Hidalgo, C. Abbey, and G. Joós, “Energy storage system
scheduling for an isolated microgrid,” IET Trans. Renew. Power Gener.,
vol. 5, pp. 117–123, 2011.
[7] J. Kumano and A. Yokoyama, “Optimal weekly operation scheduling on
pumped storage hydro power plant and storage battery considering reserve
margin with a large penetration of renewable energy,” in Proc. Int. Conf.
Power Syst. Technol., 2014, pp. 1120–1126.
[8] P. Harsha and M. Dahleh, “Optimal management and sizing of energy
storage under dynamic pricing for the efficient integration of renewable
energy,” IEEE Trans. Power Syst., vol. 30, no. 3, pp. 1164–1181, May
2015.
[9] P. P. Zeng, Z. Wu, X.-P. Zhang, C. Liang, and Y. Zhang, “Model predictive
control for energy storage systems in a network with high penetration
of renewable energy and limited export capacity,” in Proc. Power Syst.
Comput. Conf., 2014, pp. 1–7.
[10] F. Garcia and C. Bordons, “Optimal economic dispatch for renewable
energy microgrids with hybrid storage using Model Predictive Control,”
in Proc. 39th Annu. Conf. IEEE Ind. Electron. Soc., 2013, pp. 7932–
7937.
[11] S. Dutta and T. Overbye, “Optimal storage scheduling for minimizing
schedule deviations considering variability of generated wind power,” in
Proc. IEEE Conf. Power Syst. Conf. Expo., 2011, pp. 1–7.
[12] L. Nan and K. W. Hedman, “Economic assessment of energy storage in
systems with high levels of renewable resources,” IEEE Trans. Sustain.
Energy, vol. 6, no. 3, pp. 1103–1111, Jul. 2015.
[13] K. Rahbar, J. Xu, and R. Zhang, “Real-time energy storage management for renewable integration in microgrid: An off-line optimization
approach,” IEEE Trans. Smart Grid, vol. 6, no. 1, pp. 124–134, Jan. 2015.
[14] US DoE, “Benefits of demand response in electricity markets and recommendations for achieving them. A report to the United States Congress
pursuant to section 1252 of the Energy Policy Act of 2005,” U.S. Dept.
Energy, Washington, DC, USA, 2006.
[15] M. H. Albadi and E. El-Saadany, “A summary of demand response in
electricity markets,” Electr. Power Syst. Res., vol. 78, pp. 1989–1996,
2008.
[16] D. Bertsimas, E. Litvinov, X. A. Sun, J. Zhao, and T. Zheng, “Adaptive robust optimization for the security constrained unit commitment problem,”
IEEE Trans. Power Syst., vol. 28, no. 1, pp. 52–63, Feb. 2013.
[17] R. Jiang, J. Wang, and Y. Guan, “Robust unit commitment with wind
power and pumped storage hydro,” IEEE Trans. Power Syst., vol. 27,
no. 2, pp. 800–810, May 2012.
[18] L. Zhao and B. Zeng, “Robust unit commitment problem with demand
response and wind energy,” in Proc. IEEE Power & Energy Soc. General
Meeting, 2012, pp. 1–8.
[19] Z. Wang, B. Chen, J. Wang, J. Kim, and M. M. Begovic, “Robust optimization based optimal DG placement in microgrids,” IEEE Trans. Smart
Grid, vol. 5, no. 5, pp. 2173–2182, Sep. 2014.
[20] R. A. Jabr, I. Dzafic, and B. C. Pal, “Robust optimization of storage
investment on transmission networks,” IEEE Trans. Power Syst., vol. 30,
no. 1, pp. 531–539, Jan. 2015.
[21] K.-H. Ng and G. B. Sheble, “Direct load control-A profit-based load
management using linear programming,” IEEE Trans. Power Syst., vol. 13,
no. 2, pp. 688–694, May 1998.
[22] M. E. Baran and F. F. Wu, “Optimal sizing of capacitors placed on a radial
distribution system,” IEEE Trans. Power Del., vol. 4, no. 1, pp. 735–743,
Jan. 1989.
[23] H.-G. Yeh, D. F. Gayme, and S. H. Low, “Adaptive VAR control for
distribution circuits with photovoltaic generators,” IEEE Trans. Power
Syst., vol. 27, no. 3, pp. 1656–1663, Aug. 2012.
[24] C. Wan, Z. Xu, P. Pinson, Z. Y. Dong, and K. P. Wong, “Probabilistic
forecasting of wind power generation using extreme learning machine,”
IEEE Trans. Power Syst., vol. 29, no. 3, pp. 1033–1044, May 2014.
[25] B. Zeng and L. Zhao, “Solving two-stage robust optimization problems using a column-and-constraint generation method,” Oper. Res. Lett., vol. 41,
pp. 457–461, 2013.
[26] T. Achterberg, “SCIP: Solving constraint integer programs,” Math. Program. Comput., vol. 1, pp. 1–41, 2009.
Authorized licensed use limited to: the Leddy Library at the University of Windsor. Downloaded on February 16,2022 at 01:09:51 UTC from IEEE Xplore. Restrictions apply.
2868
IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 32, NO. 4, JULY 2017
[27] B. Venkatesh, R. Ranjan, and H. Gooi, “Optimal reconfiguration of radial
distribution systems to maximize loadability,” IEEE Trans. Power Syst.,
vol. 19, no. 1, pp. 260–266, Feb. 2004.
[28] C. Zhang, Y. Xu, Z.Y. Dong, and J. Ma, “A composite sensitivity factor
based method for networked distributed generation planning,” in Proc.
19th Power Syst. Comput. Conf., Jun. 2016, pp. 1–7.
[29] J. Löfberg, “YALMIP: A toolbox for modeling and optimization in MATLAB,” in Proc. IEEE Int. Symp. Comput. Aided Control Syst. Des., 2004,
pp. 284–289.
Cuo Zhang (S’15) received the B.E. (Hons.) degree
in electrical (power) engineering in 2014 from the
University of Sydney, Sydney, Australia, where he is
currently working toward the Ph.D. degree in electrical engineering. His current research interests include power system planning and operation, voltage
stability and control, smart grids, renewable energy
systems, and applications of optimization theory in
these areas. He received the 2014 University Medal,
the 2013 University Academic Merit Prize from the
University of Sydney, and the 2015 Top Final Year
Student Award from Engineers Australia.
Yan Xu (S’10–M’13) received the B.E. and M.E degrees from South China University of Technology,
Guangzhou, China in 2008 and 2011, respectively,
and the Ph.D. degree from The University of Newcastle, Australia, in 2013.
He is now a Nanyang Assistant Professor at
the School of Electrical and Electronic Engineering,
Nanyang Technological University, Singapore. His
research interests include power system stability and
control, power system optimization, microgrid, and
smart grid data-analytics.
Zhao Yang Dong (M’99–SM’06–F’17) received the
Ph.D. degree from the University of Sydney, Australia
in 1999. He is with the University of NSW. His immediate role is Professor and Head of the School of
Electrical and Information Engineering in the University of Sydney. He is also with China Southern
Power Grid Electric Power Research Institute. He
was previously Ausgrid Chair and Director of the
Centre for Intelligent Electricity Networks, the University of Newcastle, Australia. He also worked with
Transend Networks (now TASNetworks), Australia.
His research interest includes Smart Grid, power system planning, power system security, renewable energy systems, electricity market, and computational
intelligence and its application in power engineering. He is an editor of the
IEEE TRANSACTIONS ON SMART GRID, IEEE PES LETTERS, and IET Renewable Power Generation. Prof. Dong is a Fellow of IEEE.
Jin Ma (M’06) received the B.S. and M.S. degrees
in electrical engineering from Zhejiang University,
Hangzhou, China, the Ph.D. degree in electrical engineering from Tsinghua University, Beijing, China,
in 1997, 2000, and 2004, respectively. From 2004 to
2013, he was a Faculty Member of the North China
Electric Power University. Since September 2013, he
has been with the School of Electrical and Information Engineering, University of Sydney, Sydney,
NSW, Australia. His major research interests include
load modeling, nonlinear control system, dynamic
power system, and power system economics. He is the member of CIGRE W.G.
C4.605 “Modeling and aggregation of loads in flexible power networks” and
the corresponding member of CIGRE Joint Workgroup C4-C6/CIRED “Modeling and dynamic performance of inverter based generation in power system
transmission and distribution studies.” He is a registered Chartered Engineer in
the U.K.
Authorized licensed use limited to: the Leddy Library at the University of Windsor. Downloaded on February 16,2022 at 01:09:51 UTC from IEEE Xplore. Restrictions apply.