Presentation")
EECS 142
Crystal Oscillators (XTAL)
Prof. Ali M. Niknejad
University of California, Berkeley
Copyright
A. M. Niknejad
c
2009 by Ali M. Niknejad
University of California, Berkeley
EECS 242 p. 1/28
– p. 1/28
Crystal Resonator
C0
quartz
t
L1
C1
R1
L2
C2
R2
L3
C3
R3
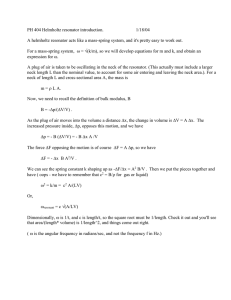
Quartz crystal is a piezoelectric material. An electric field
causes a mechanical displacement and vice versa. Thus it is a
electromechanical transducer.
The equivalent circuit contains series LCR circuits that
represent resonant modes of the XTAL. The capacitor C0 is a
physical capacitor that results from the parallel plate
capacitance due to the leads.
A. M. Niknejad
University of California, Berkeley
EECS 242 p. 2/28
– p. 2/28
Fundamental Resonant Mode
Acoustic waves through the crystal have phase velocity
v = 3 × 103 m/s. For a thickness t = 1mm, the delay time through
the XTAL is given by τ = t/v = (10−3 m)/(3 × 103 m/s) = 1/3µs.
This corresponds to a fundamental resonant frequency
f0 = 1/τ = v/t = 3MHz = 2π√1L C .
1
1
The quality factor is extremely high, with Q ∼ 3 × 106 (in
vacuum) and about Q = 1 × 106 (air). This is much higher than
can be acheived with electrical circuit elements (inductors,
capacitors, transmission lines, etc). This high Q factor leads to
good frequency stability (low phase noise).
A. M. Niknejad
University of California, Berkeley
EECS 242 p. 3/28
– p. 3/28
MEMS Resonators
The highest frequency, though, is limited by the thickness of the
material. For t ≈ 15µm, the frequency is about 200MHz. MEMS
resonators have been demonstrated up to ∼ GHz frequencies.
MEMS resonators are an active research area.
Integrated MEMS resonators are fabricated from polysilicon
beams (forks), disks, and other mechanical structures. These
resonators are electrostatically induced structures.
We’ll come back to MEMS resonators in the second part of the
lecture
A. M. Niknejad
University of California, Berkeley
EECS 242 p. 4/28
– p. 4/28
Example XTAL
Some typical numbers for a fundamental mode resonator are C0 = 3pF, L1 =
0.25H, C1 = 40fF, R1 = 50Ω, and f0 =
1.6MHz. Note that the values of L1 and
C1 are modeling parameters and not
physical inductance/capacitance. The
value of L is large in order to reflect the
high quality factor.
L1
C0
C1
R1
The quality factor is given by
Q=
A. M. Niknejad
1
ωL1
= 50 × 103 =
R1
ωR1 C1
University of California, Berkeley
EECS 242 p. 5/28
– p. 5/28
XTAL Resonance
Recall that a series resonator has a phase shift from −90◦ to
+90◦ as the impedance changes from capacitive to inductive
form. The phase shift occurs rapidly for high Q structures.
It’s easy to show that the rate of change of phase is directly
related to the Q of the resonator
Q=
ωs dφ
2 dω
ω0
For high Q structures, the phase shift is thus almost a “step”
function unless we really zoom in to see the details.
A. M. Niknejad
University of California, Berkeley
EECS 242 p. 6/28
– p. 6/28
XTAL Phase Shift
+90◦
+45◦
L1
+0◦
−45◦
−90◦
ω0
2Q
∆ω
C1
R1
ω0
In fact, it’s easy to show that the ±45◦ points are only a distance
of ωs /(2Q) apart.
1
∆ω
=
ω0
Q
For Q = 50 × 103 , this phase change requires an only 20ppm
change in frequency.
A. M. Niknejad
University of California, Berkeley
EECS 242 p. 7/28
– p. 7/28
Series and Parallel Mode
C0
L1
C1
C0
R1
L1
low resistance
R1
high resistance
Due to the external physical capacitor, there are two resonant
modes between a series branch and the capacitor. In the series
mode ωs , the LCR is a low impedance (“short”). But beyond this
frequency, the LCR is an equivalent inductor that resonates
with the external capacitance to produce a parallel resonant
circuit at frequency ωp > ωs .
A. M. Niknejad
University of California, Berkeley
EECS 242 p. 8/28
– p. 8/28
Crystal Oscillator
Leff
Leff
In practice, any oscillator topology can employ a crystal as an
effective inductor (between ωs and ωp ). The crystal can take on
any appropriate value of Lef f to resonate with the external
capacitance.
Topoligies that minmize the tank loading are desirable in order
to minize the XTAL de-Qing. The Pierce resonator is very
popular for this reason.
A. M. Niknejad
University of California, Berkeley
EECS 242 p. 9/28
– p. 9/28
Clock Application
CLK
CLK
Note that if the XTAL is removed from this circuit, the amplifier
acts like a clock driver. This allows the flexbility of employing an
external clock or providing an oscillator at the pins of the chip.
A. M. Niknejad
University of California, Berkeley
EECS 242 p. 10/28
– p. 10/28
XTAL Tempco
The thickness has tempco t ∼ 14ppm/◦ C leading to a variation
in frequency with temperature. If we cut the XTAL in certain
orientations (“AT-cut”) so that the tempco of velocity cancels
tempco of t, the overall tempco is minimized and a frequency
stability as good as f0 ∼ 0.6ppm/◦ C is possible.
Note that 1sec/mo = 0.4ppm! Or this corresponds to only 0.4Hz
in 1MHz.
This change in thickness for 0.4ppm is only
δt = 0.4 × 10−6 × t0 = 0.4 × 10−6 × 10−3 m = 4 × 10−10 . That’s
about 2 atoms!
The smallest form factors available today’s AT-cut crystals are
2×1.6 mm2 in the frequency range of 24-54 MHz are available.
A. M. Niknejad
University of California, Berkeley
EECS 242 p. 11/28
– p. 11/28
OCXO
∆f
f
15ppm
−55◦ C
25◦ C
125◦ C
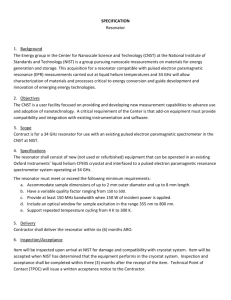
The typical temperature
variation of the XTAL is
shown. The variation is
minimized at room temperature by design but can be
as large as 15ppm at the
extreme ranges.
15ppm
To minimize the temperature variation, the XTAL can be placed
in an oven to form an Oven Compensated XTAL Oscillator, or
OCXO. This requires about a cubic inch of volume but can
result in extremely stable oscillator. OCXO ∼ 0.01ppm/◦ C.
A. M. Niknejad
University of California, Berkeley
EECS 242 p. 12/28
– p. 12/28
TCXO
analog
or digital
In many applications an oven is not practical. A Temperature
Compenstated XTAL Oscillator, or TCXO, uses external
capacitors to “pull” or “push” the resonant frequency. The
external capacitors can be made with a varactor.
This means that a control circuit must estimate the operating
temperature, and then use a pre-programmed table to generate
the right voltage to compensate for the XTAL shift.
This scheme can acheive as low as TCXO ∼ 0.05ppm/◦ C.
Many inexpensive parts use a DCXO, or a
digitally-compensated crystal oscillator, to eliminate the TCXO.
Often a simple calibration procedure is used to set the XTAL
frequency to within the desired range and a simple look-up table
is used to adjust it.
A. M. Niknejad
University of California, Berkeley
EECS 242 p. 13/28
– p. 13/28
XTAL Below ωs
1
1
=
||
jXc =
jωCef f
ωC0
C0 + Cx
ωs
1
+ jωLx
jωCx
1
1
2
=
||
1 − ω Lx Cx
jωC0 jωCx
Below series resonance, the equivalent circuit for the XTAL is a
capacitor is easily derived.
The effective capacitance is given by
Cef f = C0 +
1−
A. M. Niknejad
Cx
2
University of California, Berkeley
ω
ωs
EECS 242 p. 14/28
– p. 14/28
XTAL Inductive Region
L eff
ωs
ωp
Past series resonance, the XTAL reactance is inductive
2
1
ωs
jXc = jωLef f =
||jωLx 1 −
jωC0
ω
The XTAL displays Lef f from 0 → ∞H in the range from
ωs → ωp .
Thus for any C , the XTAL will resonate somewhere in this
range.
A. M. Niknejad
University of California, Berkeley
EECS 242 p. 15/28
– p. 15/28
Inductive Region Frequency Range
We can solve for the frequency range of (ωs , ωp ) using the
following equation
jωp Lef f =
1
||jωp Lx
jωp C0
ωp
=
ωs
..
.
r
1+
1−
ωs
ωp
2 !
Cx
C0
Example: Cx = 0.04pF and C0 = 4pF Since C0 ≫ Cx , the
frequency range is very tight
ωp
= 1.005
ωs
A. M. Niknejad
University of California, Berkeley
EECS 242 p. 16/28
– p. 16/28
XTAL Losses
Leff
vi
ro
C2
′
RL
RB
C1
|{z}
Bias
XTAL Loss
Consider now the series losses in the XTAL. Let X1 = −1/(ωC1 )
and X2 = −1/(ωC2 ), and jXc = jωLef f . Then the impedance
ZL′ is given by
ZL′
jX1 (Rx + jXc + jX2 )
=
Rx + (jXc + jX1 + jX2 )
|
{z
}
≡0 at resonance
A. M. Niknejad
University of California, Berkeley
EECS 242 p. 17/28
– p. 17/28
Reflected Losses
It follows therefore that jXc + jX2 = −jX1 at resonance and so
ZL′
jX1 (Rx − jX1 )
X1
=
= (X1 + jRx )
Rx
Rx
Since the Q is extremely high, it’s reasonable to assume that
Xc ≫ Rx and thus X1 + X2 ≫ Rx , and if these reactances are
on the same order of magnitude, then X1 ≫ Rx . Then
2
X
ZL′ ≈ 1
Rx
This is the XTAL loss reflected to the output of the oscillator.
A. M. Niknejad
University of California, Berkeley
EECS 242 p. 18/28
– p. 18/28
Losses at Overtones
Since X1 gets smaller for higher ω , the shunt loss reflected to
the output from the overtones gets smaller (more loading).
The loop gain is therefore lower at the overtones compared to
the fundamental in a Pierce oscillator.
For a good design, we ensure that Aℓ < 1 for all overtones so
that only the dominate mode oscillates.
A. M. Niknejad
University of California, Berkeley
EECS 242 p. 19/28
– p. 19/28
XTAL Oscillator Design
The design of a XTAL oscillator is very similar to a normal
oscillator. Use the XTAL instead of an inductor and reflect all
losses to the output.
C1
Aℓ = gm RL
C2
′
||RB ||ro || · · ·
RL = RL
C1
= 1, or
For the steady-state, simply use the fact that Gm RL C
2
Gm /gm = 1/Aℓ .
A. M. Niknejad
University of California, Berkeley
EECS 242 p. 20/28
– p. 20/28
XTAL Oscillator Simulation
For a second order system, the poles are placed on the circle of
radius ω0 . Since the envelope of a small perturbation grows like
v0 (t) = Keσ1 t cos ω0 t
where σ1 = 1/τ and τ =
Q
2
ω0 Aℓ −1 .
For example if Aℓ = 3, τ = ωQ0 . That means that if Q ∼ 106 , about
a million cycles of simulation are necessary for the amplitude of
oscillation to grow by a factor of e ≈ 2.71!
A. M. Niknejad
University of California, Berkeley
EECS 242 p. 21/28
– p. 21/28
PSS/HB versus TRAN
Since this can result in a very time consuming transient (TRAN)
simulation in SPICE, you can artifically de-Q the tank to a value
of Q ∼ 10 − 100. Use the same value of Rx but adjust the values
of Cx and Lx to give the right ω0 but low Q.
Alternatively, if PSS or harmonic balance (HB) are employed,
the steady-state solution is found directly avoiding the start-up
transient.
Transient assisted HB and other techniques are described in the
ADS documentation.
A. M. Niknejad
University of California, Berkeley
EECS 242 p. 22/28
– p. 22/28
Series Resonance XTAL
C2
C1
Q1
LT
RT
Q2
RB
Note
that
the
LCR tank is a low
Q(3 − 20) tuned to
the approximate desired fundamental
frequency of the
XTAL (or overtone).
The actual frequency selectivity comes from the XTAL, not the
LCR circuit. The LCR loaded Q at resonance is given by the
reflected losses at the tank
′
)
RT′ = RT ||n2 (Rx + RB
A. M. Niknejad
′
= RB ||Ri|DP
RB
University of California, Berkeley
EECS 242 p. 23/28
– p. 23/28
Series XTAL Loop Gain
At resonance, the loop gain is given by
Aℓ =
Gm RT′
′
RB
C1
′ +R
C1 + C2 RB
x
The last term is the resistive divider at the base of Q1 formed by
the XTAL and the biasing resistor.
In general, the loop gain is given by
′
C1
RB
Aℓ = Gm ZT (jω)
′ + Z (jω)
C1 + C2 RB
x
{z
}|
|
{z
}
Aℓ,1
Aℓ,2
The first term Aℓ,1 is not very frequency selective due to the low
Q tank. But Aℓ,2 changes rapidly with frequency.
A. M. Niknejad
University of California, Berkeley
EECS 242 p. 24/28
– p. 24/28
Series XTAL Fundametal Mode
Al
Al
3-5
Aℓ,1
1
Aℓ,2
Al < 1
ω0
3ω0
5ω0
ω0
3ω0
5ω0
Fund
Mode
In this case the low Q tank selects the fundamental mode and
the loop gain at all overtones is less than unity.
A. M. Niknejad
University of California, Berkeley
EECS 242 p. 25/28
– p. 25/28
Series XTAL Overtone Mode
Al
Al
Aℓ,2
Aℓ,1
3-5
1
Al < 1
ω0
3ω0
5ω0
Al < 1
ω0
3ω0
5ω0
Overtone
Mode
In this case the low Q tank selects a 3ω0 overtone mode and the
loop gain at all other overtones is less than unity. The loop gain
at the fundamental is likewise less than unity.
A. M. Niknejad
University of California, Berkeley
EECS 242 p. 26/28
– p. 26/28
Frequency Synthesis
LO (~ GHz)
XTAL (~ MHz)
For communication systems we need precise frequency
references, stable over temperature and process, with low
phase noise. We also need to generate different frequencies
“quickly” to tune to different channels.
XTAL’s are excellent references but they are at lower
frequencies (say below 200MHz) and fixed in frequency. How do
we synthesize an RF and variable version of the XTAL?
A. M. Niknejad
University of California, Berkeley
EECS 242 p. 27/28
– p. 27/28
PLL Frequency Synthesis
Phase/Frequency
Detector
UP
PFD
Loop
DN
CP Filter
LO
XTAL Reference
÷N
Frequency
Divider
This is a “phase locked loop” frequency synthesizer. The stable
XTAL is used as a reference. The output of a VCO is phase
locked ot this stable reference by dividing the VCO frequency to
the same frequency as the reference.
The phase detector detects the phase difference and generates
an error signal. The loop filter thus will force phase equality if
the feedback loop is stable.
A. M. Niknejad
University of California, Berkeley
EECS 242 p. 28/28
– p. 28/28
MEMS Reference
Oscillators
EECS 242: Lecture 25
Prof. Ali M. Niknejad
Monday, May 4, 2009
Why replace XTAL Resonators?
• XTAL resonators have excellent performance in
terms of quality factor (Q ~ 100,000), temperature
stability (< 1 ppm/C), and good power handling
capability (more on this later)
• The only downside is that these devices are bulky and
thick, and many emerging applications require much
smaller form factors, especially in thickness (flexible
electronics is a good example)
• MEMS resonators have also demonstrated high Q and
Si integration (very small size) ... are they the solution
we seek?
• Wireless communication specs are very difficult:
• GSM requires -130 dBc/Hz at 1 kHz from a 13 MHz oscillator
• -150 dBc/Hz for far away offsets
Ali M. Niknejad
Monday, May 4, 2009
University of California, Berkeley
EECS 142, Lecture 1, Slide:
2
Business Opportunity
• XTAL oscillators is a $4B market.
Even capturing a
small chunk of this pie is a lot of money.
• This has propelled many start-ups into this arena
(SiTime, SiClocks, Discera) as well as new approaches
to the problem (compensated LC oscillators) by
companies such as Mobius and Silicon Labs
• Another observation is that many products in the
market are programmable oscillators/timing chips that
include the PLL in the package.
• As we shall see, a MEMS resonator does not make
sense in a stand-alone application (temp stability), but
if an all Si MEMS based PLL chip can be realized, it can
compete in this segment of the market
Ali M. Niknejad
Monday, May 4, 2009
University of California, Berkeley
EECS 142, Lecture 1, Slide:
3
Series Resonant Oscillator
2478
• The motional resistance of
MEMS resonators is quite
large (typically koms
compared to ohms for XTAL)
and depends on the fourth
power of gap spacing
• This limits the power handling
capability
the
1. General topology for a series-resonant oscillator.
• Also, in order not to de-Q Fig.
tank, an amplifier with low
Ramp ≥ Rx + Ri + Ro = Rtot
a recently demonstrated 10-MHz oscilla
input/output impedance is Unfortunately,
using a variant of the above CC-beam resonator togeth
required. A trans-resistancewith an off-the-shelf amplifier exhibits a phase noise of on
80 dBc/Hz at 1-kHz carrier offset, and 116 dBc/Hz
amplifier is often used
far-from-carrier offsets [10]—inadequate values caused main
by the insufficient power-handling ability of the CC-bea
LIN et al.: SERIES-RESONANT VHF MICROMECHANICAL RESONATOR REFERENCEmicromechanical
OSCILLATORS, IEEE JOURNAL
OF SOLID-STATE
CIRCUITS,
VOL. 39,
NO. 12, DECEMBER 2004
resonator
device
used
[22].
This Berkeley
work demonstrates the impactEECSof142,micromechanic
Ali M. Niknejad
University of California,
Lecture 1, Slide: 4
on oscillator performan
resonator power handling and
Monday, May 4, 2009
Zero’th Order Leeson Model
2kT (1 + FRamp )
L {fm } =
·
Po
!
" #
!
"2 $
Rtot
f0
· 1+
Rx
2Ql · fm
Rx
Rx
Ql =
Q=
Q
Rx + Ri + R o
Rtot
• Using a simple Leeson model, the above expression for
phase noise is easily derived.
• The insight is that while MEMS resonators have excellent
Q’s, their power handling capability will ultimately limit
the performance.
• Typically MEMS resonators amp limit based on the nonlinearity of the resonator rather than the electronic nonlinearities, limiting the amplitude of the oscillator
LIN et al.: SERIES-RESONANT VHF MICROMECHANICAL RESONATOR REFERENCE OSCILLATORS, IEEE JOURNAL OF SOLID-STATE CIRCUITS, VOL. 39, NO. 12, DECEMBER 2004
Ali M. Niknejad
Monday, May 4, 2009
University of California, Berkeley
EECS 142, Lecture 1, Slide:
5
IEEE JOURNAL OF SOLID-STATE CIRCUITS, VOL. 39, NO. 12, DECEMBER 2004
MEMS Resonator Designs
TABLE I
RESONATOR DESIGN EQUATION SUMMARY
• Clampled-clamped beam and wine disk resonator are very
populator. Equivalent circuits calculated from
electromechanical properties.
• Structures can be fabricated from polysilicon (typical
dimensions are small ~ 10 um)
• Electrostatic transduction is used (which requires large
voltages > 10 V).
LIN et al.: SERIES-RESONANT VHF MICROMECHANICAL RESONATOR REFERENCE OSCILLATORS, IEEE JOURNAL OF SOLID-STATE CIRCUITS, VOL. 39, NO. 12, DECEMBER 2004
Ali M. Niknejad
Monday, May 4, 2009
University of California, Berkeley
EECS 142, Lecture 1, Slide:
6
CC-Beam Resonator
LIN et al.: SERIES-RESONANT VHF MICROMECHANICAL RESONATOR REFERENCE OSCILLATORS
used (with the more accurate, but cumbersome, form given
varies through the beam
in Table I). As the frequency of
resonance frequency, the output motional current magnitude
traces out a bandpass biquad frequency spectrum identical to
that exhibited by an LCR circuit, but with a much higher than
normally achievable by room temperature electrical circuits.
Fig. 3 presents the SEM and measured frequency characteristic
(under vacuum) for an 8- m-wide, 20- m-wide-electrode,
10-MHz CC-beam, showing a measured of 3100.
The values of the motional elements in the equivalent circuit
of Fig. 2 are governed by the mass and stiffness of the resonator,
and by the magnitude of electromechanical coupling at its transducer electrodes. Equations for the elements can be derived by
determining the effective impedance seen looking into the resFig. 2. Perspective view schematic and equivalent circuit of a CC-beam
Fig. 3.onator
(a) SEM
and[5],
(b) frequency
(measured
port
and cancharacteristic
be summarized
as under 20-mtorr
micromechanical resonator under a one-port bias and excitation scheme.
vacuum) for a fabricated CC-beam micromechanical resonator with an
8- m-wide beamwidth and a 20- m-wide electrode.
• This example uses an 8-μm wide beamwidth and a
is the radian resonance frequency, all other variables are specwhere
has been
ified in Fig. 2, and an approximate form for
and
are the effective stiffness and mass
of the resonator beam, respectively, at its midpoint, both given
in Table I, and is the electromechanical coupling factor. The
represents the static overlap capacitance between
capacitor
the input electrode and the structure.
Of the elements in the equivalent circuit, the series motional
is perhaps the most important for oscillator
resistance
and
design, since it governs the relationship between
at resonance, and thereby directly influences the loop gain of
the oscillator system. For the CC-beam resonator of Fig. 2,
can be further specified approximately
the expression for
(neglecting beam bending and distributed stiffness [5]) as
20-μm wide electrode.
• Measurements are performed in vacuum.
• Q ~ 3000 for a frequency of 10 MHz
Fig. 4. (a) SEM and (b)
vacuum) for a fabricated
featuring large beam a
(6)
power-handling
ability. N
Fig. 3 comes mainly fro
dc-bias and a larger electr
is 8.27 k , which is
mally exhibited by q
design of the sustain
B. Wide-Width CC-B
One convenient m
handling
LIN et al.: SERIES-RESONANT VHF MICROMECHANICAL RESONATOR REFERENCE OSCILLATORS, IEEE JOURNAL OF SOLID-STATE CIRCUITS, VOL. 39, NO. 12,power
DECEMBER
2004 is to
For example, the wi
Ali M. Niknejad
University of California, Berkeley
EECS
Lecture 1, Slide:
from 87 to
(7)142,increased
fro
trode width
Monday, May 4, 2009
CC-Beam with Better Power Handling
ANICAL RESONATOR REFERENCE OSCILLATORS
ic (measured under 20-mtorr
chanical resonator with an
ode.
2481
• To increase power handling of the resonator, a wider beam
Fig. 4. (a) SEM and (b) frequency characteristic (measured under 20-mtorr
vacuum) for a fabricated wide-width CC-beam micromechanical resonator,
and higher
featuring large beam and electrode widths for lower
power-handling ability. Note that the difference in frequency from that of
Fig. 3 comes mainly from the larger electrical stiffness caused by a higher
dc-bias and a larger electrode-to-beam overlap.
width is used [~10X in theory].
• The motional resistance is reduced to 340 ohms (Vp =
13V)
ctive stiffness and mass
ts midpoint, both given
cal coupling factor. The
ap capacitance between
is 8.27 k , which is quite large compared with the 50 norUniversitycrystals,
of California, and
Berkeley
mally exhibited by quartz
which complicates the
design of the sustaining amplifier for an oscillator application.
LIN et al.: SERIES-RESONANT VHF MICROMECHANICAL RESONATOR REFERENCE OSCILLATORS, IEEE JOURNAL OF SOLID-STATE CIRCUITS, VOL. 39, NO. 12, DECEMBER 2004
cuit, the series motional
Ali M. Niknejad
mportant
for oscillator
Monday, May 4, 2009
and
hip
between
EECS 142, Lecture 1, Slide:
8
tance
, versus
m,
m,
pite a decrease in
Disk Wineglass Resonator
LIN et al.: SERIES-RESONANT VHF MICROMECHANICAL RESONATOR REFERENCE OSCILLATORS
IEEE
JOURNAL OF SOLID-STATE CIRCUITS, VOL. 39, NO. 12, DECEMBER 2004
2483
(T 1.16) is positive), giving this device a pass-through nature
at resonance with a 0 phase shift from the -axis (input)
electrode to the -axis (output) electrode.
The two-port nature of this device whereby the input and
output electrodes are physically distinct from the resonator itself further allows a bias and excitation configuration devoid of
the bias tee needed in Fig. 2, hence, much more amenable to
on-chip integration. In particular, the applied voltages still conand an ac input signal , but now
sist of a dc bias voltage
can be directly applied to the resonator itself without the
need for a bias tee to separate ac and dc components. Similar
to the CC-beam, these voltages result in a force proportional to
that drives the resonator into the wine glass vithe product
bration mode shape when the frequency of matches the wine
glass resonance frequency, given by [30]
for more effier .
o prevent
(9)
dth increases.
nd
versus
in , the net
where
In particular,
am resonator Fig. 6. (a) Perspective-view schematic of a micromechanical wine glass-mode
disk resonator in a typical two-port bias and excitation configuration. Here,
m-wide device electrodes labeled A are connected to one another, as are electrodes labeled
V), B. (b) Wine-glass mode shape simulated via finite element analysis (using Fig. 7. (a) SEM and (b)–(c) frequency characteristics (measured under
20-mtorr vacuum with different dc bias voltages) of a fabricated 60-MHz wine
quency spec- ANSYS). (c) Equivalent LCR circuit model.
glass disk resonator with two support beams.
that although
0 to 1036 as a a free–free mode shape. Free–free beam micromechanical resthan two or- onators have been successfully demonstrated, one with a fre- approximate expression for
takes on a similar form to that
on-chip spiral quency of 92 MHz and a of 7450 [29].
of (7), and can be written as
pplications.
Even better performance, however, can be obtained by
(10)
portantly, the abandoning the beam geometry and moving to a disk geom(11)
nal advantage etry. In particular, radial-mode disk resonators have recently
LIN et al.: SERIES-RESONANT VHF MICROMECHANICAL RESONATOR REFERENCE OSCILLATORS, IEEE JOURNAL OF SOLID-STATE CIRCUITS, VOL. 39, NO. 12, DECEMBER 2004
about due to been
with
s function
10 000 of
at frequencies
and demonstrated
where
is
Bessel
first kind of exceeding
order ,
ofAli
theM.40m- 1.5 GHz,
is the even
resonance
the [18].
disk radius,
and of, California,
, where
whenfrequency,
operating inis air
wine-glass-mode
is now the effective stiffness of the disk. ForEECS
a 3-142,
m- Lecture 1, Slide: 9
Niknejad
University
Berkeley
larger than disks
, arenow
the been
density,
Poisson ratio,
andMHz
Young’s
and have
demonstrated
at 60
with modulus,
s on the thick, 32- m-radius version of the disk in Fig. 6, dc biased to
Monday, May 4, 2009
respectively, of the disk structural material. Although hidden in
• Intrinsically better power handling capability from a
wine glass resonator.
• The input/output ports are isolated (actuation versus
sensing).
Sustaining Amplifier Design
IEEE JOURNAL OF SOLID-STATE CIRCUITS, VOL. 39, NO. 12, DECEMBER 2004
width has been reduced from 1.5 m
y loss from the disk to the substrate
us, maximize the device . Even
he measured
of 1.5 k for the
ine glass disk with
V and
than the 50 normally exhibited
nd thus, in an oscillator application
er capable of supporting higher tank
ons, the stiffness of this wine glass
N/m, which is 71.5 the
0-MHz wide-width CC-beam. Ac, and , (8) predicts a power
her for the wine glass disk. For the
d result in a 10-dB lower far-from-
• Use feedback amplifier to create positive feedback transFig. 8. Top-level circuit schematic of the micromechanical resonator
oscillator of this work. Here, the (wine glass disk) micromechanical resonator
is represented by its equivalent electrical circuit.
resistance
r circuit, a sustaining amplifier cirAutomatic
omparatively
large
motional resis- gain control is used so that the oscillation self•
esonators is needed. As mentioned
limits
the electronic non-linearity. This reduces
a previous oscillator
[21], athrough
transreith the resonator is a logical choice,
theandoscillator
amplitude but also helps to reduce 1/f noise
, respecput resistances
impose relatively
small loading on
up-conversion
of the system to be very
oaded
G
AMPLIFIER DESIGN
LIN et al.:sacrificing
SERIES-RESONANT
VHF
MICROMECHANICAL RESONATOR REFERENCE OSCILLATORS, IEEE JOURNAL OF SOLID-STATE CIRCUITS, VOL. 39, NO. 12, DECEMBER 2004
, without
power
transfer
mplifier
would need to have suffiAli M. Niknejad
University of California, Berkeley
EECS 142, Lecture 1, Slide: 10
ction
II; would need to provide a 0
Monday, May 4, 2009
Fig. 8. Top-level circuit schematic of the micromechanical resonator
oscillator of this work. Here, the (wine glass disk) micromechanical resonator
is represented by its equivalent electrical circuit.
Amplifier Details
DESIGN
aining amplifier cirarge motional resiseded. As mentioned
llator [21], a transreor is a logical choice,
and
, respecely small loading on
he system to be very
ficing power transfer
d need to have suffineed to provide a 0
circuit schematic of the single-stage sustaining transresistance
e the 0 phaseSingle-stage
shift Fig. 9. Detailed
amplifier
is
used
to
maximize
bandwidth.
amplifier
of
this
work,
implemented
by
a
fully
differential
amplifier
in a
sonance, per item 2)
one-sided shunt-shunt feedback configuration.
Recall
that any phase shift through the amplifier
the above with min-
•
causes theand
oscillation
frequency
to shift
(andandphase
provide
resistances
and
of the oscillator cirnoise serve
to degrade)
as shunt-shunt feedback elements that allow control of
mechanical resonator
t (which in this case the transresistance gain via adjustment of their gate voltages.
Common-mode feedback used to set output voltage.
Fig. 6). As•shown, The need for two of them will be covered later in Section V
on ALC.
used to best accomFeedback
resistance and Amplitude Level Control
he micromechanical
(ALC)
implemented
with
MOS
resistors
A.
Transfer
Function
particular sustaining
LIN et al.: SERIES-RESONANT VHF MICROMECHANICAL RESONATOR REFERENCE OSCILLATORS, IEEE JOURNAL OF SOLID-STATE CIRCUITS, VOL. 39, NO. 12, DECEMBER 2004
vious two-stage cirAli M. Niknejad
one gain stage, but
Monday, May 4, 2009
Expressions for the dc transresistance gain, input resistance,
University of California, Berkeley
and output resistance,
of the sustaining amplifier are as follows:
EECS 142, Lecture 1, Slide:
11
consumption of the amplifier and might disturb the
accomcy
is minimal. In particular,theaspower
detailed
in [31], an
impedance
balance
in the loop.
hanical
ase
shift close to 0 allows the micromechanical resstaining A. Transfer Function In addition, the use of larger
s can impact the 3-dB bandwhere
ratecirat the point
of highest
in the
its phase
versus
where which as
represents
the be
input-referred
current noise
age
Expressions
for theslope
dc transresistance
gain,
inputamplifier,
resistance,
width
of
transresistance
a rule should
urve,
which
it to more
effectively
and allows
output resistance,
the
sustaining
amplifier
arefrequency
as
follows:so amplifier,
age, but
oscillation
that its phase shift at
atofleast
10 the suppress
, and
is the
sustaining
rviations
oscil- caused by amplifier
phase
deviations.
The In referred
this
frequency
is minimal.
particular,voltage
as detailed
in source
[31], anof the differential op amp
noise
noise
the micromechanical resamplifier
close to 0byallows
fs the
transresistance amplifier
of Fig.phase
9 is ashift
function
(12)
cillator
onator to
operate
at the point of highest slope in its phase versus where
represents th
apacitance
in both the transistors
and
the micromef a fully
frequency
curve,
which
allows it to more effectively suppress sustaining amplifier,
nator,
and
is
best
specified
by
the
full
transfer
funcnt-shunt
(13) phase deviations. The
frequency deviations caused by amplifier
referred voltage noise sou
amplifier
e other.
Design Equations
erential
p of the
a total
g a low
nt-shunt
transisntial op
edback
esistors
bandwidth of the transresistance amplifier of Fig. 9 is a function by
of parasitic capacitance in bothwhere
the transistors
and the microme(14)is 2/3 for long-channel devices, and from 2–3
chanical resonator, and is best for
specified
by the full transfer
funcshort-channel
devices.
In (21), all common mode
tion for the amplifier
is the transconductance of
, (15)and sources
are theare nulled by the common-mode feedback
where
and
, respectively,
isInMOS
reoutput resistance of
addition,
flicker noise is neglected
osc
2/3 forthe
long-ch
where issince
and
, assumed
to be is beyond the flicker noise
sistor value implemented by
frequency
corner, and (2)
rep
for short-channel
devices
much smaller than the s, and the forms on the far rights assources
are nulled
only an approximate expression
that accounts
for by th
(15)
(16)
. (Note that
sume a large amplifier loop gain
flicker noise
and
white noise at large offsets.In(Ifaddition,
(2) attempted
to i
this is amplifier loop where
gain, not oscillator loop gain.) In
practice,
frequency
beyond need
the fl
noise, then transistor flicker
noiseiswould
only an approximate exp
(16)
included.)
These
equations
arewith
used to trade-off betweenandpower
oop transresistance
gain of
the base amplifier
white noise at large
From
(21)
noise
from
this
sustaining
amplifier impro
ding, where and noise in the oscillator. The device size cannot noise,
then transis
be
the size of the op amp input transistors
and/or their dra
included.)
is the open loop transresistance gain of the base amplifier with
rents increase—the
same
design
changes
needed
to from
decre
too large
since
the
bandwidth
needs
to
be
about
10X
From
(21)
noise
feedback loading, where
and
, with the same
bandwidth-based
the size
of the op amp in
the oscillation frequency. amplifier
tions on input transistor
s. For
given resonator
rentsaincrease—the
same d
and
, wit
amplifier
sustaining
amplifier
oscillation frequency , the optimal
tions on input transistor
that
still
meets
wireless
handset
specifications
for the ref
LIN et al.: SERIES-RESONANT VHF MICROMECHANICAL RESONATOR REFERENCE OSCILLATORS, IEEE JOURNAL OF SOLID-STATE CIRCUITS, VOL. 39, NO. 12, DECEMBER 2004
(17) oscillator can be found by simultaneous
, th
oscillationsolution
frequencyof (2)
Ali M. Niknejad
University of California, Berkeley
EECS
142,
Lecturewireless
1, Slide: 12
thatand
stillinput
meets
and (18), to obtain the drain(17)
current
transistorha
•
Monday, May 4, 2009
oscillator can be found b
Amplitude Control Loop
2486
IEEE J
• Precision peak-
detector used to
sense oscillation
amplitude. This is
done by putting a
MOS diode in the
feedback path of an
inverting op-amp
Fig. 11.
(b) win
tiny la
mariz
Fig. 10. (a) Top-level and (b) detailed circuit schematics of the ALC circuit.
this w
LIN et al.: SERIES-RESONANT VHF MICROMECHANICAL RESONATOR REFERENCE OSCILLATORS, IEEE JOURNAL OF SOLID-STATE CIRCUITS, VOL. 39, NO. 12, DECEMBER 2004 Fig
power is applied. As the amplitude of oscillation
grows and ricated
Ali M. Niknejad
University of California, Berkeley
EECS 142, Lecture 1, Slide: 13
’s channel resistance to below that sistan
the ALC reduces
Monday, May 4, 2009
Measured Spectra and Time-Domain
Fig. 14. Extracted
from the peaks shown in Fig. 13 versus their
is also derived from
corresponding input power. The
the
curve and compared with
for a typical case to illustrate
graphical determination of the steady-state oscillation amplitude.
• These are the
measurements without
using the ALC
• The oscillation self-limits
due to the resonator nonlinearity
• Notice the extremely small
oscillation amplitudes
• With the ALC, the
oscillation amplitude drops
to 10mV
Fig.
10-M
CCosci
Syst
CC
8.4
T
han
noi
the
CC
The
1
the
1
the
Fig. 15. Measured steady-state Fourier spectra and oscilloscope waveforms
1
for (a) the 10-MHz 8- m-wide CC-beam resonator oscillator; (b) the 10-MHz
(if
40- m-wide CC-beam resonator oscillator; and (c) the 60-MHz wine glass disk
resonator oscillator. All data in this figure are for the oscillators with ALC
T
LIN et al.: SERIES-RESONANT VHF MICROMECHANICAL RESONATOR REFERENCE OSCILLATORS,
IEEE JOURNAL OF SOLID-STATE CIRCUITS, VOL. 39, NO. 12, DECEMBER 2004
disengaged.
not
Ali M. Niknejad
University of California, Berkeley
EECS 142, Lecture 1, Slide: 14
the
wine glass disk design when it comes to power handling. Ac- com
Monday, May 4, 2009
LIN et al.: SERIES-RESONANT VHF MICROMECHANICAL RESONATOR REFERENCE OSCILLATORS
2487
Experimental Results
TABLE II
RESONATOR DATA SUMMARY
TABLE III
OSCILLATOR DATA SUMMARY
Fig. 12. Photo of the sustaining transresistance amplifier IC fabricated in
TSMCs 0.35- m CMOS process.
• Performance close to
Fig. 13. Measured open-loop gain of the 10-MHz wide-width CC-beam
oscillator circuit under increasing input signal amplitudes. These curves were
taken via a network analyzer sweeping down in frequency (i.e., from higher to
lower frequency along the -axis).
of the three resonator designs summarized in Table I.
GSM specs. DC power each
Fig. 16 presents plots of phase-noise density versus offset from
carrier frequency for each oscillator, measured by directing
and area are compelling the
the output signal of the oscillator into an HP E5500 Phase
Noise Measurement System.
quick comparison of the oscilloscope waveforms of
• The measured 1/f noise Fig.A 15(a)–(c),
which shows steady-state oscillation amplimuch larger than
tudes of 42 mV, 90 mV, and 200 mV, for the 8- m-wide
10-MHz CC-beam, the 40- m-wide 10-MHz CC-beam, and
expected
the 60-MHz wine glass disk, respectively, clearly verifies the
which point the loop gain of an oscillator would drop to 0 dB,
the oscillation amplitude would stop growing, and steady-state
oscillation would ensue. Although the plot of Fig. 13 seems
to imply that Duffing nonlinearity might be behind motional
resistance increases with amplitude, it is more likely that deor
with amplitude are more responsible
creases in
[21], since Duffing is a stiffness nonlinearity, and stiffness (like
inductance or capacitance) is a nondissipative property.
Oscillators with the ALC loop of Fig. 10 disengaged were
tested first. Fig. 15 presents spectrum analyzer plots and oscilloscope waveforms for oscillators with ALC disengaged using
utility of wide-CC-beam design and the superiority of the
LIN et al.: SERIES-RESONANT VHF MICROMECHANICAL RESONATOR REFERENCE OSCILLATORS, IEEE JOURNAL OF SOLID-STATE CIRCUITS, VOL. 39, NO. 12, DECEMBER 2004
Ali M. Niknejad
Monday, May 4, 2009
University of California, Berkeley
EECS 142, Lecture 1, Slide:
15
E-9.<?>-(?%7N%D@-=?<'=.@%D(3'(--<'(3%.(/%07>94?-<%*='-(=-%
O('F-<;'?5%7N%G'=:'3.()%P((%P<Q7<)%G'=:'3.(%RLSKM#JSJJ)%O*P%
D&T%IUR#IVR#HRSS)%WPXT%IUR#VRI#SILS)%->.'@T%58@'(Y4>'=:"-/4%
Array-Composite MEMS Wine-Glass Osc
ACT
Q5% SU% /Z% :.;% Q--(% 7Q?.'(-/%
.=-#>'=<7>.=:'(-/% >'=<7>-#
<-9@.='(3%?:-%;'(3@-%<-;7(.?7<%
;%8'?:%.%>-=:.('=.@@5#=749@-/%
%?:-%978-<%:.(/@'(3%.Q'@'?5%7N%
*9-='N'=.@@5)% .% >-=:.('=.@@5#
8'(-#3@.;;%/';A%<-;7(.?7<;%->#
779% 8'?:% .% =4;?7>#/-;'3(-/)%
;?.'('(3% .>9@'N'-<% .=:'-F-;% .%
S%A[\%7NN;-?%.(/%#SUV%/Z=^[\%
(% /'F'/-/% /78(% ?7% SK% G[\)%
#SUL% /Z=^[\% .?% S% A[\% 7NN;-?%
<'-<%7NN;-?)%8:'=:%<-9<-;-(?%SU%
<% <-=-(?@5% 94Q@';:-/% 87<A% 7(%
7<% 7;='@@.?7<;)% .(/% .@;7% (78%
% <-]4'<->-(?;% Q5% L% /Z% .(/% S%
%
Coupling
Output
Support
%
Anchor
Beam
Electrode
Beam
%
%
#%!
%
"%!
%
WGDisk
WGDisk
WGDisk
%
%
*+!
%
% "#!
&'!
Input
%
Electrode
%
*,! +,! $,! #%!
"%!
%
(
!
%
%
"#!
$%!
$%!
*+!
%
!%
%
)!
%
W'3"%ST%g-<;9-=?'F-#F'-8%;=:->.?'=%7N%.%>4@?'%e?:<--f%8'(-#3@.;;%/';A%>'=<7#
>-=:.('=.@%<-;7(.?7<%.<<.5"%1:-%-@-=?<'=.@%-]4'F.@-(?%='<=4'?%N7<%?:-%<-;7(.?7<%
';%;:78(%?7%?:-%Q7??7>%<'3:?"%
• Increase power handling capability by coupling
multiple (N)
resonators
together.
%
1
Mode
%
UCTION
%
Amplitude
This
increases
power
handling
capability by N.
%
•
% '(% .% 8'<-@-;;% =7>>4('=.?'7(%
st
!
%
%
Monday, May 4, 2009
(dB)
'(% ?:-% <-N-<-(=-% 7;='@@.?7<% ';%
%
nd
2
Mode
('.?4<'\-)% ;'(=-%.`;%
a%
SK)KKK%
%
!"#$"%&'()%*"#*"%&')%+"%,-()%.(/%0"%1"#0"%2345-()%6&78%9:.;-%(7';-%.<<.5#=7>97;'?-%>'=<7>-=:.('=.@%8'(-#3@.;;%/';A%7;='@@.?7<)B%!"#$%&#'()
%
(%UH%99>%4(=7>9-(;.?-/%7F-<%
*&+",-)%CDDD%C(?"%D@-=?<7(%E-F'=-;%G?3")%$.;:'(3?7()%E0)%E-="%H#I)%%JKKH)%99"%JLI#JMK"%
%
-%7(#=:'9"%,-=-(?@5)%:78-F-<)%
%
%
%
Table
Data Summary
.('=.@% <-;7(.?7<;%
Q.;-/%
7(%1. Oscillator
%
9 Res.
5 Res.
3 Res.
%
%
rd
3 Mode
%'(=<-.;'(3@5%.??<.=?'F-%.;%7(# a;='@@.?7<%E-;'3(%*4>>.<5%
! = 118,900
! = 119,500
! = 122,500
%
%
-30
%
%
(?;% N7<% =7>>4('=.?'7(#3<./-%
c<7=-;;%
1*G0%K"XH%">%0Ga*%
%
%
Freq.
Q5%
/->7(;?<.?'7(;%
7N%
.`;%
a%
-40
Ali M. Niknejad
University
EECS 142, Lecture
1, Slide: 16
1 Res.
]7@?.3-%*499@5)
#%Z"TH%]%of California, Berkeley%
%
(=5% ?->9-<.?4<-%C(?-3<.?-/%
/-9-(/-(='-;%c78-<%07(;"%
%
! = 161,000
-50
XHK%"$%
%
Transmission (dB)
$
Transmission (dB)
$%
Transmission (dB)
$%
Transmission (dB)
Design Summary
Transmission (dB)
%
&.574?%Y<-.%
%%$%ZKH%">%$%ZKH%">%
%
%
%%
%
%
3 WGDisk
!"#$"%&'()%*"#*"%&')%+"%,-()%.(/%0"%1"#0"%2345-()%6&78%9:.;-%(7';-%.<<.5#=7>97;'?-%>'=<7>-=:.('=.@%8'(-#3@.;;%/';A%7;='@@.?7<)B%!"#$%&#'()
1 WGDisk
%
%
*&+",-)%CDDD%C(?"%D@-=?<7(%E-F'=-;%G?3")%$.;:'(3?7()%E0)%E-="%H#I)%%JKKH)%99"%JLI#JMK"%
%
%
%
%
%
%
Table
1.
Oscillator
Data
Summary
%
!"#$"%&'()%*"#*"%&')%+"%,-()%.(/%0"%1"#0"%2345-()%6&78%9:.;-%(7';-%.<<.5#=7>97;'?-%>'=<7>-=:.('=.@%8'(-#3@.;;%/';A%7;='@@.?7<)B%!"#$%&#'()
%
%
5 WGDisk
9 Res.
5 Res.
3 Res.
%
%
%
*&+",-)%CDDD%C(?"%D@-=?<7(%E-F'=-;%G?3")%$.;:'(3?7()%E0)%E-="%H#I)%%JKKH)%99"%JLI#JMK"%
! = 118,900
! = 119,500
! = 122,500
%
a;='@@.?7<%E-;'3(%*4>>.<5%
%
%
-30
9
WGDisk
%
%
%
c<7=-;;%
1*G0%K"XH%">%0Ga*%
% %%
Table
1.
Oscillator
Data
Summary
%
%
-40
%
9 Res.
5 Res.
3 Res.
1 Res.
]7@?.3-%*499@5)
#%Z"TH%]%
% %%
%
! = 119,500 ! =!161,000
= 122,500
% %%
-50 ! = 118,900
C(?-3<.?-/%
c78-<%07(;"%
XHK%"$%
%
a;='@@.?7<%E-;'3(%*4>>.<5%
%
-30
%
0'<=4'?%
View
% % Zoom-in
Y>9@'N'-<%d.'()
L%A!%
-60
%
Input
Wine-Glass
c<7=-;;%Y>9@'N'-<%e$%
1*G0%K"XH%">%0Ga*%
R'3"%Ib%G
% %%
JKK%GUV%
Support Beams
-40
Electrode
Disk
?:-%/-;'<-70
1 Res.
% %%
]7@?.3-%*499@5)
#%Z"TH%]%
&.574?%Y<-.%
HK%">%$%HK%">%
?'7(%.(/%:
% %% -50
!
= 161,000
Data
-80
C(?-3<.?-/%
c78-<%07(;"%
XHK%"$%
c7@5;'@'=7(#e.;-/%
c<7=-;;)
% %%
" = 32 "m
(.?7<;% '
0'<=4'?%
*4<N.=-%G'=<7>.=:'('(3%
Y>9@'N'-<%d.'()
L%A!%
-90
% %% -60
#
=
3
"m
;7>-8:
%
,./'4;)%/)
XJ%">%
Y>9@'N'-<%e$%
JKK%GUV%
"=32"m
% %%
$% = 80 nm
-100
-70
:-<-% ';%
GDG*%
1:'=A(-;;)%$) HK%">% HK%">%
X%">%
&' = 7 V
% %%
&.574?%Y<-.%
%
$'(-#d@.;;%
-110
7</-<%?7
d.9)%34)
LK%(>%
% %% -80
Data
c7@5;'@'=7(#e.;-/%
E';A%c<7=-;;
[="N")%R'3
61.73
61.78
61.83
61.88
61.93
% %%
)
]7@?.3-%*499@5%
ZK%]%
" = 32 "m
*4<N.=-%G'=<7>.=:'('(3%
,-;7(.?7<%
97'(?;)%
Frequency (MHz)
% %% -90
Output# = 3 "m
c78-<%07(;"%
f%K%$%
Y<<.5,./'4;)%/
Anchor
Coupling
Beam
%
XJ%">%
%
)
Electrode
<->7F-/
% R'3"%Tb%G-.;4<-/% N<-W4-(=5% =:.<.=?-<';?'=% N7<% .% N.O<'=.?-/%
8'(-#3@.;;%
/';A%
$% = 80 nm
G7?'7(.@%
H"IH%A!)%X"ZZ%A!)%Z"ML%A!)%
-100
%
GDG*%
% <-;7(.?7<#.<<.5"%
1:'=A(-;;)%$)
X%">%
-<8';-%:
7V
,-;';?.(=-)%/0%
Z"JH%A!%N7<%%)\%Z)%X)%H)%M%
' = F.<5'(3%
%R'3"%Hb%*DGS;% 7N% N.O<'=.?-/% 8'(-#3@.;;% /';A% <-;7(.?7<#.<<.5;%&8'?:%
% % -110-40
$'(-#d@.;;%
=7(?<'O4
d.9)%34)&.574?%Y<-.%
(4>O-<;%7N%>-=:.('=.@@5#=749@-/%8'(-#3@.;;%/';A;"%
%%LK%(>%
$%ZKH%">%$%ZKH%">%
%
%
E';A% %
%
N.=?7<% O
5-Res.
61.73
61.78Array 61.83
61.88
61.93
%
]7@?.3-%*499@5%
ZK%]%
-45
%
%
,-;7(.?7<%%
/-?.'@-/
No Spurious
&'(= 7Frequency
V
3 WGDisk
1 WGDisk
(MHz)
RESULTS
%
%
-50 IV. EXPERIMENTAL
c78-<%07(;"%
f%K%$%
Y<<.5% %
-.=:%-@%
R'3"%Tb%G-.;4<-/%
N<-W4-(=5% =:.<.=?-<';?'=% N7<% .%Modes
N.O<'=.?-/% 8'(-#3@.;;% /';A%
%
G7?'7(.@%
H"IH%A!)%X"ZZ%A!)%Z"ML%A!)%
$'(-#3@.;;%
/';A%
.<<.5%
<-;7(.?7<;%
8-<-%
N.O<'=.?-/%
F'.%
.%
-55
Z"L`)% J"L
%
%
<-;7(.?7<#.<<.5"%
Selected
,-;';?.(=-)%/
%
Z"JH%A!%N7<%%)\%Z)%X)%H)%M%
%
;9-=?'F% ?:<--#97@5;'@'=7(%;-@N#.@'3(-/%;?->%9<7=-;;%4;-/%9<-F'74;@5%?7%
%
-60
5 WGDisk 0
Mode
%
%
-40/';A% <-;7(.?7<;% PMQ"% R'3"% H% 9<-;-(?;% *DGS;% 7N% N.O<'#
% .=:'-F-%
&.574?%Y<-.%
%% ZKH%">% %ZKH%">%
27?%
-65
%
%
%
=.?-/%TK#GUV%8'(-#3@.;;%/';A%.<<.5;%8'?:%F.<5'(3%(4>O-<;%7N%
?:-% .O7F
%%
9 WGDisk
5-Res. Array
%
-45
%
-70
%
=749@-/%<-;7(.?7<;)%-.=:%;4997<?-/%O5%7(@5%?87%;4997<?%O-.>;"%
%
N-<-%8'?:
%
No Spurious
&'(= 7 V
%
3 WGDisk
1 WGDisk
%
-50
%
%
52 >-.;4<-/%
57 N<-W4-(=5%
62 ;9-=?<.%
67
72
R'3"%
T% 9<-;-(?;%
N7<% .% ;?.(/#.@7(-%
<-;7(.?7
%
Modes
%
%
%
%
8'(-#3@.;;%/';A%<-;7(.?7<%?73-?:-<%8'?:%<-;7(.?7<%.<<.5;%4;'(3%
Frequency (MHz)
8:'=:%8
-55
% %
Zoom-in View
%
%
Selected
X)%H)%.(/%M%<-;7(.?7<;%>-=:.('=.@@5%=749@-/%8'?:%7(-%.(7?:-<"%
O4?%.?%?:
Input
Wine-Glass
N<-W4-(=5% ;9-=?<4>% F-<'N5'(3% (7% ;94<'74;% >7/-;% .<74(/%
% R'3"%Ib%G-.;4<-/%
%
-60
5 %WGDisk Support Beams
Mode
Electrode
Disk
?:-% ;'(3@-%
<-;7(.?7<% .=:'-F-;% ?:-% :'3:-;?% .% 7N%
%17% .
?:-%/-;'<-/%>7/-%7N%?:-%<-;7(.?7<%.<<.5)%.=:'-F-/%F'.%9<79-<%-@-=?<7/-%-_='?.#
%
% Y@?:743:%
%
?'7(%.(/%:.@N#8.F-@-(3?:%=749@'(3%O-.>%/-;'3("%
=:.('=.@
%
-65
% ZTZ)KKK)%?:-%.<<.5%.S;%.<-%;?'@@%.@@%3<-.?-<%?:.(%ZZH)KKK"%
%
%
9 WGDisk
R<7>%?:-%9-.A%:-'3:?;)%/
%[8'?:%1
%\%I%]^%=.(%O-%-_?<.=?-/%
?:-%N<-W4
% (.?7<;% '(% ?:-% .<<.5^"% Y@?:743:%
0
2
%
/'NN-<-(=-;%
'(% .% =7(?<'O4?-%
-70
%
% ?7% O-% ZZ"IX% A!)% T"X`% A!)% `"K`% A!)% .(/% J"HT% A!)% N7<% Z)% X)% H)%
8'/-%N<%
;7>-8:.?% ?7% ?:-% @78-<% >4@?'9@'=.?'7(% N.=?7<)% ?:-% >.'(% =4@9<'?%
%
"=32"m
%
52
57
62
67
72
<-;97(/
.(/% M%
.<<.5;)%
1:-%
>-.;4<-/%/
%
0% <-/4=#
%
:-<-%
';%<-;7(.?7<%
?:-% (--/% ?7%
;9@'?%<-;9-=?'F-@5"%
?:-% -@-=?<7/-;%
O-?8--(%
<-;7(.?7<;%
'(%
%
%
%
?:-%4?'@'
?'7(% N.=?7<;% 7N% Z"LH)% J"MK)%
.(/% `"HL)%(MHz)
.=?4.@@5% N.@@% ;:7<?% 7N% ?:-%
Frequency
7</-<%?7%.F7'/%=749@'(3%O-.>;%@7=.?-/%.?%:'3:%F-@7='?5%97'(?;%
%
Zoom-in
View
%
%
?<7/-%9@.
-_9-=?-/%X)%H)%.(/%M)%<-;9-=?'F-@5%['"-")%?:-%(4>O-<%7N%?:-%<-;7#
[="N")%R'3"%Z^"%*'(=-%?:-%=749@'(3%O-.>;%.??.=:%.?%:'3:%F-@7='?5%
Input
Wine-Glass
%
R'3"%Ib%G-.;4<-/%
N<-W4-(=5% ;9-=?<4>% F-<'N5'(3% (7% ;94<'74;% >7/-;% .<74(/%
%
97'(?;)% ?:-% -@-=?<7/-;% O-?8--(% <-;7(.?7<;% >4;?% O-% ;9@'?% .(/%
% Support Beams
Electrode
DiskOutput
?:-%/-;'<-/%>7/-%7N%?:-%<-;7(.?7<%.<<.5)%.=:'-F-/%F'.%9<79-<%-@-=?<7/-%-_='?.#
!"#$"%&'()%*"#*"%&')%+"%,-()%.(/%0"%1"#0"%2345-()%6&78%9:.;-%(7';-%.<<.5#=7>97;'?-%>'=<7>-=:.('=.@%8'(-#3@.;;%/';A%7;='@@.?7<)B%!"#$%&#'()
%
Anchor
Coupling
Beam
%
Electrode
<->7F-/%.?%:'3:%F-@7='?5%97'(?;%8:-<-%?:-%=4<<-(?%874@/%7?:#
?'7(%.(/%:.@N#8.F-@-(3?:%=749@'(3%O-.>%/-;'3("%
%
*&+",-)%CDDD%C(?"%D@-=?<7(%E-F'=-;%G?3")%$.;:'(3?7()%E0)%E-="%H#I)%%JKKH)%99"%JLI#JMK"%
%
-<8';-%:.F-%O--(%?:-%@.<3-;?"%1:';%3<-.?@5%<-/4=-;%?:-%=4<<-(?%
%
R'3"%Hb%*DGS;% 7N% N.O<'=.?-/% 8'(-#3@.;;% /';A% <-;7(.?7<#.<<.5;% 8'?:% F.<5'(3%
(.?7<;%
'(% ?:-% .<<.5^"% Y@?:743:% /'NN-<-(=-;% '(% .% =7(?<'O4?-%
%
%
(4>O-<;%7N%>-=:.('=.@@5#=749@-/%8'(-#3@.;;%/';A;"%
% =7(?<'O4?'7(% N<7>% ;4=:% '((-<% -@-=?<7/-;)% ?:-<-O5%<-/4='(3% ?:-%
Table
1. Oscillator Data Summary
• Prototype resonator implemented in a 0.35μm CMOS
process shows no spurious modes
• Area is still quite resonable compared to a bulky XTAL
Ali M. Niknejad %
%
%
Monday, May 4, 2009 %
8:'=:%
?:-%
>7?'7(.@%
<-;';?.(=-%
';%EECS
@78-<-/"%
Y%
>7<-%
;7>-8:.?%
?:-% @78-<%
>4@?'9@'=.?'7(%
N.=?7<)%
?:-%
University of California, Berkeley
142,>.'(%
Lecture
1, Slide:
9 Res.
5 Res.
3=4@9<'?%
Res.
% N.=?7<% O5%?7%
"=32"m
7N%?:-%
/0% -@-=?<7/-;%
4;'(3%
'(?-3<.?'7(%
:-<-%
';% ?:-%/-?-<>'(.?'7(%
(--/%
;9@'?%
O-?8--(%
<-;7(.?7<;%
'(%
! ?7%
= 118,900
!F-@7='?5%
= 119,500
! 7F-<%
= 122,500
IV. EXPERIMENTAL RESULTS
% /-?.'@-/%
a;='@@.?7<%E-;'3(%*4>>.<5%
-.=:%-@-=?<7/-%[-"3")%.;%/7(-%'(%PZKQ^%5'-@/;%<-/4=?'7(%<.?'7;%7N%
17
Measured Phase Noise
!"#$"%&'()%*"#*"%&')%+"%,-()%.(/%0"%1"#0"%2345-()%6&78%9:.;-%(7';-%.<<.5#=7>97;'?-%>'=<7>-=:.('=.@%8'(-#3@.;;%/';A%7;='@@.?7<)B%!"#$%&#'()
!"#$"%&'()%*"#*"%&')%+"%,-()%.(/%0"%1"#0"%2345-()%6&78%9:.;-%(7';-%.<<.5#=7>97;'?-%>'=<7>-=:.('=.@%8'(-#3@.;;%/';A%7;='@@.?7<)B%!"#$%&#'()
!"#$"%&'()%*"#*"%&')%+"%,-()%.(/%0"%1"#0"%2345-()%6&78%9:.;-%(7';-%.<<.5#=7>97;'?-%>'=<7>-=:.('=.@%8'(-#3@.;;%/';A%7;='@@.?7<)B%!"#$%&#'()
*&+",-)%CDDD%C(?"%D@-=?<7(%E-F'=-;%G?3")%$.;:'(3?7()%E0)%E-="%H#I)%%JKKH)%99"%JLI#JMK"%
%
*&+",-)%CDDD%C(?"%D@-=?<7(%E-F'=-;%G?3")%$.;:'(3?7()%E0)%E-="%H#I)%%JKKH)%99"%JLI#JMK"%
*&+",-)%CDDD%C(?"%D@-=?<7(%E-F'=-;%G?3")%$.;:'(3?7()%E0)%E-="%H#I)%%JKKH)%99"%JLI#JMK"%
Power
(dB)
Power
(dB)
Power (dB)
Phase Noise (dBc/Hz)
%
%%
% -20
%%
% -20 -20
Single
%%
-40
%
%
Resonator
%
Single Single
%
-40
% -40
%
Resonator
Resonator
-60
%
9-Resonator
%
%
Array 9-Resonator
-60
%%
% -60
9-Resonator
3
-80
%
1/!
"
Noise
%
Array
%
Array
3
-80
3
%%
-80
1/!" Noise
% -100
1/!" NoiseFrequency
%
%
Divided Down
%-100
%
Frequency
%
to
10 MHz Frequency
% -120 -100
%
Divided
Down
%
Divided Down
%
%-120
to
10
MHz
%%
-140 -120
to 10 MHz
%
%%
1/!"2 Noise
%-140
-160 -140
%%
%
%%
1/!"2 Noise
1.E+01
1.E+02
1.E+03
1.E+04 1.E+05
-160
%
1/!"2 Noise
%%
-160
% 1.E+01
Offset Frequency
%%
1.E+02
1.E+03 (Hz)
1.E+04 1.E+05
%
% N'3"%QKj%b:.;-%(7';-%/-(;'?5%F-<;4;%=.<<'-<%7PP;-?%P<-S4-(=5%9@7?;%P7<%?:-%XK#
1.E+01 1.E+02 1.E+03 1.E+04 1.E+05
Offset Frequency (Hz)
% GWR% %8'(-#3@.;;% /';A% <-;7(.?7<#.<<.5%
7;='@@.?7<)% >-.;4<-/% 4;'(3% .(% Wb%
Offset
Frequency (Hz)
N'3"%QKj%b:.;-%(7';-%/-(;'?5%F-<;4;%=.<<'-<%7PP;-?%P<-S4-(=5%9@7?;%P7<%?:-%XK#
DHHKK%% b:.;-% 27';-% G-.;4<->-(?% *5;?->"% 1:-% ?87% ;?.<% ;5>O7@;% ;:78% ?:-%
GWR%
8'(-#3@.;;%
/';A% <-;7(.?7<#.<<.5% 7;='@@.?7<)% >-.;4<-/% 4;'(3% .(% Wb%
_*G%;9-='P'=.?'7(%P7<%=@7;-#?7#=.<<'-<%.(/%P.<#P<7>#=.<<'-<%7PP;-?;"%
N'3"%QKj%b:.;-%(7';-%/-(;'?5%F-<;4;%=.<<'-<%7PP;-?%P<-S4-(=5%9@7?;%P7<%?:-%XK#
DHHKK%GWR%
b:.;-% 8'(-#3@.;;%
27';-% G-.;4<->-(?%
*5;?->"% 1:-% ?87%
;?.<% ;5>O7@;%
;:78% ?:-%
/';A% <-;7(.?7<#.<<.5%
7;='@@.?7<)%
>-.;4<-/%
4;'(3% .(% Wb%
_*G%;9-='P'=.?'7(%P7<%=@7;-#?7#=.<<'-<%.(/%P.<#P<7>#=.<<'-<%7PP;-?;"%
='<=4'?%.(/%GDG*%/-F'=-%7(?7%.%;'(3@-%;'@'=7(%=:'9)%>.A-;%?:-%
DHHKK% b:.;-% 27';-% G-.;4<->-(?% *5;?->"% 1:-% ?87% ;?.<% ;5>O7@;% ;:78% ?:-%
Phase
Noise
(dBc/Hz)
Phase
Noise
(dBc/Hz)
%
%% %
230 mV
%% %
%% %
230
230
mVmV
%% %
%% %
%% %
%% %
%% %
%
%%
%
%%
%
%
% N'3"%Lj%G-.;4<-/% ;?-./5#;?.?-% 7;='@@7;=79-% 8.F-P7<>% P7<% ?:-% XK#GWR% 8'(-#
% %3@.;;%/';A%<-;7(.?7<#.<<.5%7;='@@.?7<"%
%
N'3"%Lj%G-.;4<-/%
;?-./5#;?.?-% 7;='@@7;=79-% 8.F-P7<>% P7<% ?:-% XK#GWR% 8'(-#
%
%
N'3"%Lj%G-.;4<-/%
;?-./5#;?.?-% 7;='@@7;=79-% 8.F-P7<>% P7<% ?:-% XK#GWR% 8'(-#
%3@.;;%/';A%<-;7(.?7<#.<<.5%7;='@@.?7<"%
0
%
%%3@.;;%/';A%<-;7(.?7<#.<<.5%7;='@@.?7<"%
%
%% % % 0 -10
%
0
%% %
-10 -20
%% %
-10-30
-20
%% %
-20-40
%% %
-30
%% %
-30-50
-40
%% %
-60
-40
-50
%% %
-70
%% %
-50
-60
-80
% %
% %
-70
-60
%
-90
%
-80
% %
-70 61.5
61.7
61.9
%% %
-90
Frequency (MHz)
-80
%% %
61.5 ;?-./5#;?.?-%
61.7
61.9P7<% ?:-% XK#GWR% 8'(-#3@.;;%
N74<'-<% ;9-=?<4>%
-90
%% N'3"%Mj%G-.;4<-/%
Frequency (MHz)
%% /';A%<-;7(.?7<#.<<.5%7;='@@.?7<"%
61.5
61.7
61.9
%
N'3"%Mj%G-.;4<-/%
;?-./5#;?.?-% N74<'-<% ;9-=?<4>% P7<% ?:-% XK#GWR% 8'(-#3@.;;%
Frequency (MHz)
N7<%7;='@@.?7<%?-;?'(3)%?:-%C0%.(/%GDG*%=:'9;%8-<-%'(?-<#
%
/';A%<-;7(.?7<#.<<.5%7;='@@.?7<"%
>'=<7>-=:.('=.@%
<-;7(.?7<#.<<.5% 7;='@@.?7<% 7P% ?:';% 87<A% .(%
_*G%;9-='P'=.?'7(%P7<%=@7;-#?7#=.<<'-<%.(/%P.<#P<7>#=.<<'-<%7PP;-?;"%
='<=4'?%.(/%GDG*%/-F'=-%7(?7%.%;'(3@-%;'@'=7(%=:'9)%>.A-;%?:-%
.??<.=?'F-% 7(#=:'9% <-9@.=->-(?% P7<% S4.<?R% =<5;?.@% <-P-<-(=-%
>'=<7>-=:.('=.@%
<-;7(.?7<#.<<.5%
7;='@@.?7<% 7P%
?:';%
.(%
='<=4'?%.(/%GDG*%/-F'=-%7(?7%.%;'(3@-%;'@'=7(%=:'9)%>.A-;%?:-%
7;='@@.?7<;%
'(% =7>>4('=.?'7(;%
.99@'=.?'7(;"%
a(/%
.@@%87<A%
7P% ?:';%
.??<.=?'F-%
7(#=:'9% <-9@.=->-(?%
P7<% S4.<?R%
=<5;?.@% <-P-<-(=-%
>./-%97;;'O@-%O5%-PP-=?'F-@5%:.<(-;;'(3%?:-%'(?-3<.?'7(%./F.(#
>'=<7>-=:.('=.@%
<-;7(.?7<#.<<.5%
7;='@@.?7<%
7P% ?:';% 87<A% .(%
7;='@@.?7<;%
'(%
=7>>4('=.?'7(;%
.99@'=.?'7(;"%
a(/%
.@@%
7P% ?:';%<-P-<-(=-%
?.3-%7P%>'=<7>-=:.('=;)%8:'=:%.@@78;%.%/-;'3(-<%?7%O<-.A%?:-%
.??<.=?'F-% 7(#=:'9% <-9@.=->-(?% P7<% S4.<?R% =<5;?.@%
>./-%97;;'O@-%O5%-PP-=?'F-@5%:.<(-;;'(3%?:-%'(?-3<.?'7(%./F.(#
6>'('>.@';?B%
9.<./'3>%
?:.?% /'=?.?-;% ?:-%.99@'=.?'7(;"%
4;-% 7P% 7(-% .(/%a(/%
7(@5%.@@% 7P% ?:';%
7;='@@.?7<;%
'(% =7>>4('=.?'7(;%
?.3-%7P%>'=<7>-=:.('=;)%8:'=:%.@@78;%.%/-;'3(-<%?7%O<-.A%?:-%
7(-%S4.<?R%=<5;?.@%'(%.(%7;='@@.?7<)%.(/%'(;?-./)%9-<>'?;%?:-%4;-%
>./-%97;;'O@-%O5%-PP-=?'F-@5%:.<(-;;'(3%?:-%'(?-3<.?'7(%./F.(#
6>'('>.@';?B%
9.<./'3>% ?:.?% /'=?.?-;%
?:-%.;%(--/-/)%8'?:%
4;-% 7P% 7(-% .(/%@'??@-%
7(@5%
7P% .;% >.(5% >'=<7>-=:.('=.@%
<-;7(.?7<;%
?.3-%7P%>'=<7>-=:.('=;)%8:'=:%.@@78;%.%/-;'3(-<%?7%O<-.A%?:-%
=7((-=?-/%F'.%8'<-#O7(/'(3)%.(/%?-;?'(3%8.;%/7(-%4(/-<%F.=#
N'3"%Mj%G-.;4<-/%
;?-./5#;?.?-% N74<'-<% ;9-=?<4>% P7<% ?:-% XK#GWR% 8'(-#3@.;;% 7(-%S4.<?R%=<5;?.@%'(%.(%7;='@@.?7<)%.(/%'(;?-./)%9-<>'?;%?:-%4;-%
;'R-%7<%=7;?%9-(.@?5"%
9.<./'3>%<-;7(.?7<;%
?:.?% /'=?.?-;%
?:-% 4;-% 7P% @'??@-%
7(-% .(/% 7(@5%
N7<%7;='@@.?7<%?-;?'(3)%?:-%C0%.(/%GDG*%=:'9;%8-<-%'(?-<#
44>%?7%9<-;-<F-%?:-%:'3:%.%7P%?:-%>'=<7>-=:.('=.@%<-;7(.?7<;%
/';A%<-;7(.?7<#.<<.5%7;='@@.?7<"%
7P%
.;%6>'('>.@';?B%
>.(5% >'=<7>-=:.('=.@%
.;%(--/-/)%8'?:%
Acknowledgments.%
1:';%
87<A%
8.;%
;4997<?-/%
4(/-<%
Ea,ba%
7<%.<<.5;"%N'3;"%L#QK%9<-;-(?%7;='@@.?7<%9-<P7<>.(=-%/.?.)%;?.<?#
=7((-=?-/%F'.%8'<-#O7(/'(3)%.(/%?-;?'(3%8.;%/7(-%4(/-<%F.=#
7(-%S4.<?R%=<5;?.@%'(%.(%7;='@@.?7<)%.(/%'(;?-./)%9-<>'?;%?:-%4;-%
;'R-%7<%=7;?%9-(.@?5"%
_<.(?%27"%NTKXKJ#KQ#Q#KHIT"%
N7<%7;='@@.?7<%?-;?'(3)%?:-%C0%.(/%GDG*%=:'9;%8-<-%'(?-<#
'(3%
8'?:% ?:-% 7O@'3.?7<5% 7;='@@7;=79-% .(/% ;9-=?<4>% .(.@5R-<%
44>%?7%9<-;-<F-%?:-%:'3:%.%7P%?:-%>'=<7>-=:.('=.@%<-;7(.?7<;%
7P% .;% >.(5% >'=<7>-=:.('=.@% <-;7(.?7<;% .;%(--/-/)%8'?:% @'??@-%
Acknowledgments.%
1:';% 87<A% 8.;% ;4997<?-/% 4(/-<% Ea,ba%
!"#$"%&'()%*"#*"%&')%+"%,-()%.(/%0"%1"#0"%2345-()%6&78%9:.;-%(7';-%.<<.5#=7>97;'?-%>'=<7>-=:.('=.@%8'(-#3@.;;%/';A%7;='@@.?7<)B%!"#$%&#'()
8.F-P7<>;)%
.(/% =4@>'(.?'(3% '(% .% 9@7?% 7P% 9:.;-% (7';-% /-(;'?5%
=7((-=?-/%F'.%8'<-#O7(/'(3)%.(/%?-;?'(3%8.;%/7(-%4(/-<%F.=#
7<%.<<.5;"%N'3;"%L#QK%9<-;-(?%7;='@@.?7<%9-<P7<>.(=-%/.?.)%;?.<?#
REFERENCES
;'R-%7<%=7;?%9-(.@?5"%
_<.(?%27"%NTKXKJ#KQ#Q#KHIT"%
*&+",-)%CDDD%C(?"%D@-=?<7(%E-F'=-;%G?3")%$.;:'(3?7()%E0)%E-="%H#I)%%JKKH)%99"%JLI#JMK"%
F-<;4;%
7PP;-?%
P<7>% ?:-%7;='@@7;=79-%
=.<<'-<% P<-S4-(=5"%
1:-% @.;?%.(.@5R-<%
7P% ?:-;-%
'(3%
8'?:% ?:-%
7O@'3.?7<5%
.(/% ;9-=?<4>%
44>%?7%9<-;-<F-%?:-%:'3:%.%7P%?:-%>'=<7>-=:.('=.@%<-;7(.?7<;%
[Q\ !"#$"%&'()%*"%&--)%*"#*"%&')%!"%c'-)%+"%,-()%.(/%0"%1"#0"%2345-()%6*-<'-;#
Acknowledgments.% 1:';% 87<A% 8.;% ;4997<?-/% 4(/-<% Ea,ba%
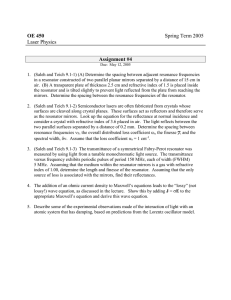
;:78;%.%9:.;-%(7';-%7P%#QJT%/U=VWR%.?%Q%AWR%7PP;-?%P<7>%?:-%
8.F-P7<>;)%
.(/%
=4@>'(.?'(3%
'(%
.%
9@7?%
7P%
9:.;-%
(7';-%
/-(;'?5%
7<%.<<.5;"%N'3;"%L#QK%9<-;-(?%7;='@@.?7<%9-<P7<>.(=-%/.?.)%;?.<?#
<-;7(.(?%`WN%>'=<7>-=:.('=.@%<-;7(.?7<%<-P-<-(=-%7;='@@.?7<;)B%0111)23)
%
REFERENCES
%
Table
1.
Oscillator
Data
Summary
=.<<'-<)%
.(/%
#QTX%
/U=VWR%
.?%
P.<#P<7>#=.<<'-<%
7PP;-?;"%
1:';%
P.<#
_<.(?%27"%NTKXKJ#KQ#Q#KHIT"%
45(&674-'-")8&9#:&-,)%F7@"%TM)%(7"%QJ)%99"%JYII#JYMQ)%E-="%JKKY"%
F-<;4;%
?:-% =.<<'-<%
P<-S4-(=5"%.(/%
1:-%;9-=?<4>%
@.;?%University
7P% ?:-;-%
%7PP;-?%
'(3% 8'?:%
?:-%P<7>%
7O@'3.?7<5%
7;='@@7;=79-%
.(.@5R-<%
9 Res.
5 Res.
3 Res.
Ali M. Niknejad
of California,
Berkeley
EECS 142, Lecture
1, Slide: 18
[Q\
P<7>#=.<<'-<%
(7';-%
P@77<%
';%
.O74?%
Y%
/U%
O-??-<%
?:.(%
?:.?%
7P%
.(%
[J\ !"#$"%&'()%*"%&--)%*"#*"%&')%!"%c'-)%+"%,-()%.(/%0"%1"#0"%2345-()%6*-<'-;#
$"#1"% W;4%% .(/% 0"% 1"#0"% 2345-()% 6*?'PP(-;;#=7>9-(;.?-/% ?->9-<.?4<-#
;:78;%.%9:.;-%(7';-%7P%#QJT%/U=VWR%.?%Q%AWR%7PP;-?%P<7>%?:-%
! = 118,900
! = 119,500
! = 122,500
8.F-P7<>;)% .(/% =4@>'(.?'(3%
'(% .% 9@7?% 7P% 9:.;-% (7';-% /-(;'?5% <-;7(.(?%`WN%>'=<7>-=:.('=.@%<-;7(.?7<%<-P-<-(=-%7;='@@.?7<;)B%0111)23)
a;='@@.?7<%E-;'3(%*4>>.<5%
REFERENCES
'(;-(;'?'F-%% >'=<7>-=:.('=.@% <-;7(.?7<;)B%
!"#$%&#'() *&+",-)% GDG*dKJ)%
4;'(3%
.%
;'(3@-%
8'(-#3@.;;%
/';A%
<-;7(.?7<)%
F-<'P5'(3%
Monday, =.<<'-<)%
May7;='@@.?7<%
4, 2009
.(/% #QTX% /U=VWR% .?% P.<#P<7>#=.<<'-<% 7PP;-?;"% 1:';% P.<#
-30
• Meets GSM specs with comfortable margin
displacement
xWe
duealso
to the
forcethe
Fe natural
is given by:
spring
constant.
define
frequency
ω0 ηu
= ac , F
Fe ≈
!
(1)
is:
e
2. Mechanical lumped model for the resonator. Fig. 3. The electrical equivalent circuit for MEMS-based oscillator.
k/m and the quality xfactor
Q =,important
ω0 m/γ. The
resonator
nical lumped model for the resonator.
The
observation
= H(ω)F
(2) is that, t
Fig.−1
3. The electrical equivalent
circuit
for
MEMS-based
oscillator.
e
Fig. 1. Schematic representation of noise aliasing in micro-oscillator.
where
the
displacement
is assumed
k
displacement
xCdue
to the
force
Fe is
given by:
motional
resistance
Rm
, axlarge
electrom
where
at zero
displacement.
In
(6),
0 is the capacitance
H(ω)
.
(3)
A linear resonator would filter
out the=
amplifier low-frequency 1/f where
the
displacement
x
2 /ω 2 where
1
−
ω
+
iω/Qω
pared
to
the
gap
d.
By
substituting
(8)
duction
factor
is
needed
requiring
either
the
force-displacement
transfer
function
H(ω)
from
noise present at the resonator input, but nonlinear
filtering
element
the
first
term
is
due
to
the
capacitance
variations
(mo0
0
ere
m
is
the
lumped
mass, γ is the damping
coefficient,
frinoise
aliasing
inaliasing.
micro-oscillator.
in noise
et will
al.: result
analysis
of
phase
noise and micromechanical
oscillators
tional
current im ),xand
the
second
the the
normal
AC-U2323
=
H(ω)F
, isto
(2)
aequivalent
large
DC-bias
voltage
. In
practice,
eterm
(1) is:
dcd.
pared
gap
By
sub
cal
circuit
shown
in
Fig.
3
where
C
is
the
capacitance
at
zero
displacement.
In
(6),
is
the
electrostatic
forcing
term,
and
k
is
the
mechanical
current
through
the
capacitance.
The
electromechanical
the
lumped
mass,
γ
is
the
damping
coefficient,
The
electrostatic
force
actuating
the
resonator
is:
0
t the amplifier low-frequency 1/f Thea
ally isaslimited
by system
considerations
component
values
are:
transduction
factor
is
identified
[12]:
−1 equivalent
cal
circuit
showU
ing
constant.
We
also
define
the
natural
frequency
ω
=
ut,
but
nonlinear
filtering
element
the
first
term
is
due
to
the
capacitance
variations
(mok
0
where
the
force-displacement
transfer
function
H(ω)
from
motiona
gap,
typically
less
than
1
µm,
is
needed.
ctrostatic forcing term,1 ∂C
and k is the
mechanical
H(ω) =
.
(3)
2
2
2
√
∂C
C
F
=
(U
+
u
)
,
(4)
0
k/m and the quality factor
Q = ωtional
m/γ.
e
acThe resonator
−Uω
/ω
iω/Qω
im ), andη1=the
second
term
the
normal
duction
(1)
is:current
0dc
will
beU+dcseen
sections,
the
0 is following
component
values
are:
0
≈
. in the
(7)
2 ACdc
2
∂x
R
=
km/Qη
=
k/ω
ant.
We
also
define
the
natural
frequency
ω
=
∂x
d
m nonlinear effectsathat
0capacitance.
T
largelim
sult in unwanted
placement x due to the force Fe is
given by:
current
through
the
The
electromechanical
−1
The electrostatic
force
actuating
resonator
is:2im ,
The
resulting
relation
between
the motional
current
where Ufactor
(DC)-bias
voltage
over
the
k the
√
dc is the direct
allymot
is li
amplitude
and
cause
noise
aliasing.
the quality
Q =current
ω0transduction
m/γ.
The
resonator
C
=
η
/k,
m
factor
is
identified
as
[12]:
H(ω)
=
.
(3)
the mechanical
transducer
velocity
ẋ, theequivalent
excitation voltFig.
3. The
electrical
circuit
for MEMS-b
gap, uac is thexalternating
current
(AC)-excitation
voltage,
2
2
gap,
typ
R
=
km/
=
H(ω)F
,
(2)
1
−
ω
/ω
+
iω/Qω
m
1
∂C
duct
e
0
age
u
,
and
the
force
F
at
the
excitation
frequency
are:
2
2
0
ac
e
nt x dueand:to the force Fe is given by:
,(4)
andwill
Fe =
(Udc
+ uac ) ,L
m = m/η Spring
be
s
B.
Nonlinear
Electrostatic
Force
a
lar
2 ∂xi∂C
C
2
0
m ≈ η ẋ, the resonator is:
1. Schematic
representation of noise
aliasing
in
micro-oscillator.
The
electrostatic
force
actuating
Celm/d=
ηsult
/k,
in u
η
=
U
≈
U
(7)
ere
the force-displacement
transfer
function
H(ω)
from
A
.
Ael
dc
dc C.0 = $0(8)
0
ally
where
is(DC)-bias
capacitance
at zero
displace
FC
,
e ≈
acthe
0 ηu
near resonator
would
filter
out
theresonator.
amplifier
low-frequency
1/f
- direct
∂x
d
C
=
$
,
(5)
where
U
is
the
current
voltage
over
the
0
dc
amplitu
Due
to
the
inverse
relationship
betwe
Fig.
2.
Mechanical
lumped
model
for
the
x
=
H(ω)F
,
(2)
is:
e
d
−
x
2
gap,
e present at the resonator input, but nonlineargap,
filtering
the
first
term
is
due
to
the
capacitance
va
1
∂C
uFig.
is
thethe
alternating
current
(AC)-excitation
voltage,
2
ac where
3.element
The
electrical
equivalent
circuit
for
MEMS-based
oscillator.
L
=
m/η
displacement
x is assumed
to
be
small
comdisplacement
and
the
parallel
plate
capa
m (4)
The
important
observation
is
that
F
=
(U
+
u
)
,
e
dc
ac
result in noise
aliasing.
The
resulting
relation
between
the
motional
current
i
, ths
will
m
tional
current
i
),
and
the
second
term
is
pared
to
the
gap
d.
By
substituting
(8)
into
(1),
an
electriand:
is isthe
capacitance
that depends on 2the
−1
∂x trostatic mcoupling introduces nonlinear
B. Nonl
where m
the transducer
lumped mass, working
γ is thekdamping
coefficient,
RThe
, a large
elect
calH(ω)
equivalent
circuit
shown
in Fig. resistance
3 can
bethe
derived.
mC
chematic
in
micro-oscillator.
sult
orce-displacement
transfer
Fe isrepresentation
the
electrostatic
forcing
term,
and
k is$0the
mechanical
the
mechanical
velocity
ẋ,
excitation
volt=
$
A
/
permittivity
of aliasing
free
space
, function
the
electrode
areatransducer
A(3)
,current
andmotional
through
the
capacitance.
The
elect
H(ω)of=noise
.
elfrom
0
0
el
ditionally,
nonlinear
effects
of
mechanica
A
2
2
where
C
is
the
capacitance
at
zero
displacement.
In
(6),
el
component
values
are:
0
resonator
would
filter We
outalso
the1define
amplifier
low-frequency
1/f -ω00U
spring
constant.
natural
=dc through
− ωthe/ω
+d.frequency
iω/Qω
where
is
the
direct
current
(DC)-bias
over
the
duction
factor
isvoltage
needed
requiring
eith
C
=
$
,
(5)
!
amp
the
nominal
electrode
gap
The
current
the
elec0
0
transduction
factor
is
identified
as
[12]:
age
u
,
and
the
force
F
at
the
excitation
frequency
are:
sible,
and
most
fundamentally
material
Due
ac the first term is due√eto the
sent at k/m
the resonator
input, but
nonlinear
element
capacitance
variations (moand the quality
factor
Q = ω0filtering
m/γ. The
resonator
d−
2 x(AC)-excitation
2
gap,
u
is
the
alternating
current
voltage,
large
voltage
practi
=DC-bias
k/ω
Qη is
,the
trodexis:
actional current i R),
m = akm/Qη
0for
dc . Indisplace
t in noise
aliasing.
the
limit
miniaturization
[4] [13
displacement
due to the force Fe is given by:
second
term
the
normal U
ACm and the
e electrostatic force actuating the and:
resonator
is:
The
important
observa
2
∂C(9)onconsideration
Ctrostati
Cmthe
= ηally
/k,
is
the
transducer
working
capacitance
that
depends
the
is
limited
by
system
0 and
current
through
capacitance.
The
electromechanical
however,
the
gap
is
assumed
small,
t
B. N
i
≈
η
ẋ,
∂CU
∂C
∂u
m
−1
ac
x = H(ω)F
,
(2)
η
=
U
≈
U
.
e
dc
dc
2
isig = k
≈
Udc
+ Ctransduction
, of free
(6)
permittivity
space
$pacitive
the as
electrode
Ael1, µm,
and isThus,
Lm
=ism/η
factor
identified
[12]: lessarea
(8)
0
0, , and
motional
resistance
R
,
nonlinearity
dominates.
aa
l
ditional
∂x
d
gap,
typically
than
neede
m
1
∂C
∂t
∂t
∂t
A
2
el
H(ω)
.
(3)
≈
ηucurrent
where the =
force-displacement
transfer
function
H(ω)
from
ed.
ac,,
C0C
=
$F
/d
the
nominal
electrode
gap
The
through
the elec-sections,
0A
el
0.
F
=
(U
+
u
)
,
(4)
=
$
(5)sible, an
2
2
0
e
dc
ac
will
be
seen
in
the
following
t
D
for the
resonator.
∂C
C
1
−
ω
/ω
+
iω/Qω
duction
factor
is
needed
r
0
(1) is:
0
d
−
x
2 ∂x 0
The
resulting
relation
between
the
motion
trode is: The importantη observation
= Udc
≈
U
dc to. obtain a small (7)
thedisp
lim
is
that,
sult
in
unwanted
nonlinear
effects
tha
∂x
d
the the
mechanical
transducer
velocity
ẋ,
the U
ex
where
the motional
displacement
x, ∂C
assumed
to
be
small
comk −1
a
large
DC-bias
voltage
resistance
R
a is
large
electromechanical
transhowever
m
The
system
is
non-linear
due
to
electrostatic
∂CU
∂u
is
the
transducer
working
capacitance
that
depends
on
the
=
.
(3)
ere Udc is theH(ω)
direct
current
(DC)-bias
voltage
over
the
ac
trosfr
amplitude
and
cause
noise
aliasing.
1 − ω 2 /ω02 + iω/Qω
duction
factor
is
needed
requiring
either
a
small
gap
d
or
The
resulting
relation
between
the
motional
current
i
,
0 resonator
i
=
≈
U
+
C
,
(6)
static
force
actuating
the
is:
m
age
u
,
and
the
force
F
at
the
excitation
sig
dc
0
pared
to the gap
d. By
substituting
(8)
into
ac
e (1), an electripacitive
the
damping
coefficient,
permittivity
of
free
space
$
,
the
electrode
area
A
,
and
ally
is
limited
by
system
c
∂t
∂t
∂t
p,γuis
is
the
alternating
current
(AC)-excitation
voltage,
0
el
a
large
DC-bias
voltage
U
.
In
practice,
the
voltage
usudc
ditio
ac
the
mechanical
transducer
velocity
ẋ,
the
excitation
voltmechanism
and
the
mechanical
non-linearities
The electrostatic force actuating the resonator
is:equivalent
cal
circuit
shown
in
Fig.
3and,can
be
derived.
The
limited
system
considerations
thus,
a small
the
nominal
gap
d.
The
current
through
the
elecage ally
uacelectrode
,is and
thebyforce
F
at
the
excitation
frequency
are:
term, and k is the mechanical
d:
e
sible
im ≈less
η ẋ, Spring
gap,
typically
than
1µ
B.
Nonlinear
Electrostatic
For
gap,
typically
less
than
1
µm,
is
needed.
Unfortunately,
as
1
∂C
1
∂C
2
kaajakari
et
al.:
analysis
of
phase
noise
and
micromechanical
oscillators:
ieee
transactions
on
ultrasonics,
2
component
values
are:
trode
is:
Fe =
(Udcω
+0uac
) ,
(4) will be seen in the following sections, the small gap will rene the F
natural
frequency
=
the
=
(U
+
u
)
,
(4)
2
∂x
im ≈will
η ẋ, be seen
e
F
≈
ηu
,
ferroelectrics, anddc
frequency
control, vol. 52, no. 12, december 2005
Ael ac
e
ac
in
the
followin
sult in unwanted
nonlinear effects that limit the vibration (8)
√
lumped
model
for
the resonator.
2
∂x
C
=
$
,
(5)
how
r2.QMechanical
=
ω
m/γ.
The
resonator
0
0
∂CU
∂C
∂u
where Udc is the direct current (DC)-bias voltage over the amplitude and cause noise
Due
to
the
inverse
relationship
be
F
≈
ηu
,
2
2
ac
aliasing.
e
ac
d
−
x
R
=
km/Qη
=
k/ω
Qη
,
Mechanical
lumped
model
for
the
resonator.
i
=
≈
U
+
C
,
(6)
sult
nonlinea
0
Ali M.F
Niknejad
University of California,
142, Lecture
1, Slide:paci
sig mBerkeley
dc in 0unwanted
gap,
is the alternating
rce
by: current (AC)-excitation voltage,
where
the
displacement
xEECSis
assumed
to19ca
b
e uisac given
∂t
∂t
∂t
displacement
and
the
parallel
plate
and:
where the displacement x is assumed to be small com-
Phase Noise: Model for Resonator
•
B. Nonlinear
Spring Force
2
s the direct current (DC)-bias voltage
overElectrostatic
the
Monday, May 4, 2009
UUdc2 frequency
∂C
low-frequ
ieee transactions on ultrasonics, ferroelectrics, and
control, vol.the
52, no.
12, dece
∂C
dc
= nonlinear
. terms, the
(10)
lowers the resonance frequency. OfFthe
24
= 2 ∂x.
The nonlinear electrostatic spring constants are Fob2 ∂x
second-order
correction
k
can
be
shown
to dominate
tained
by
a
series
expansion
of
the
electrostatic
force:
2e
odel is used, and the accurate nonlinear model is used
(10)
carrier
signal
[1].
side-bands
at
Including
terms
up
to
the
second
order
gives
for
the
Including
terms
up
to
the
second
order
gives
for
the
electrostatic
nonlinearity limits the resonator drive
r the electromechanical The
transduction
[14].
2
Udc
∂C
electrostatic
spring:
in the resona
electrostatic
spring:
F
=
.
(10)
The nonlinear electrostatic
spring
constants
are
oblevel as at high-vibration
amplitudes; the amplitude2 ∂x
carrier side-b
2
ined by a series expansion
of
the
electrostatic
force:
(x)
=
k
(1
+
k
x
+
k
x
)
k
e
0e
1e
2e
Fig. 4. Schema
frequency curve is not
a
single
valued
function
2 and oscilla= k0e
(1 +
k1ethe
x + k2e x )
ke (x)order
Including terms up to the second
gives
The
aliasi
2for
noise uFig.
p
n (∆ω)4.
U
C
3
2
0
2
DC
tions
even become chaotic
Umay
due to
ω0 ± ∆ω
k0e = −2 [1]2 [4].
, kTherefore,
, andthe
k2e =max. (11)
electrostatic
spring:
noise
u
1e =
dc ∂C
2
mental
to
t
U
C
3
2
d
2d
d
0
F
=
.
(10)
DC
imum2 usable
vibration
can
k0e amplitude
=−
, k1ebe
= estimated
, and k2efrom
= 2 . (11) ω0 ± ∆
∂x
2
2
d
2d
d thuslow-frequenc
ke (x) = k0e (1 + k1e x + k2e x )The linear electrostatic
spring
k
is
negative,
and
Fig.
4.
Schematic
representation
of noise aliasi
0e
the
largest
vibration
amplitude
before
a
bifurcation.
This
the low-frequ
Including terms up to the
gives
for
the
2second orderlowers
noise
u
(∆ω)
present
at
filter
input
is aliased to
the
resonance
frequency.
Of
the
nonlinear
terms,
the
the
thermal
n
UDC C0
3 linear electrostatic
2
carrier
signal
The
spring
k
is
negative,
and
thus
0e due
critical
amplitude
can
be
written
as
[4],
[15]:
±
∆ω
to
mixing
in
resonator.
ω
k0e
= − vibration
,
k
=
,
and
k
=
.
0
1e
2e
second-order
correction
k
can
be
shown
to
dominate
[1].
ectrostatic spring:
(11)
2e
the
lo
2 in the
The second-order
correction
spring
constant
sources
prese
d2
2d
d
side-bands
at
lowers the
frequency.
the the
nonlinear
Theresonance
electrostatic
nonlinearityOf
limits
resonatorterms,
drive the carrie
in the eleme
resona
taining
2and
+ k1eelectrostatic
x + k2e x2 ) second-order
ke (x) = kThe
springlevel
k0e isasnegative,
thus
at high-vibration
amplitudes;
the
amplitudecorrection
k
can
be
shown
to
dominate
[1].
dominates
0e (1linear
Fig. 2e
4. Schematic
representation
of signal
noise carrier
aliasing.
Low
side-b
the low-frequency
noise
at ∆ω
mul
!
x
=
,
(12)
side-b
c
√
isnonlinearity
not
athe
single
valued
function
and
oscillahave
a ne
si
lowers
Offrequency
the
nonlinear
terms,
2the resonance frequency.
noise
un (∆ω)
present
at filter
input
is may
aliased
to carrier
The
electrostatic
limits
the
resonator
drive
UDC
C0
3
2 curve
The
aliasi
carrier
signal
at
ω
results
in
additional
0
in the
3
3Q|κ|
tions
may
even
become
chaotic
[1]
[4].
Therefore,
the max±
∆ω
due
to
mixing
in
resonator.
ω
k0e =
−Electrostatic
,
k
=
,
and
k
=
.
second-order
correction
k
can
be
shown
to
dominate
[1].
0
1e
2e
2e
(11)
non-linearity
limits
the
drive
level
at
high
biasing
level
as
at
high-vibration
amplitudes;
the
amplitude2
2
mentalalso
toFit
As illustrated
in
side-bands
atestimated
ω0 ±∆ω. from
d
2d
d
imum
usable
vibration
amplitude
can
be
carrie
The electrostatic nonlinearity limits the resonator drive
low-frequenc
frequency
curve
is
not
a
single
valued
function
and
oscillawith
a
charg
in
the
resonator
causes
aliasing
of
low-fre
the
largest
vibration
amplitude
before
a
bifurcation.
This
vibration
amplitudes.
as at
high-vibration
amplitudes;
Th
The linearlevel
electrostatic
spring k0e is negative,
andthe
thusamplitude- carrier side-bands.
where:
the
thermal
tions
may
even
become
Therefore,
the
maxthechaotic
low-frequency
noise
signal
atmay
∆ω multiplied
bementa
sign
critical
vibration
can[1]
be[4].
written
as [4],
[15]:
frequency
curve is not
single
valued
function
andamplitude
oscillawers the resonance
frequency.
Ofathe
nonlinear
terms,
the
sources
prese
The
aliasing
of
low-frequency
noise
can
2
2
carrier
signal
at
ω
results
in
additional
near-car
imum
usable
vibration
amplitude
can
from
0 be estimatedter
The
system
can
become
chaotic
at
high
drive
scale
[18]
tions
may
even
become
chaotic
[1]
[4].
Therefore,
the
max3k
k
5k
k
taining
elemep
2e 0e
2
cond-order correction k2e can be shown to dominate
[1].
1e 0e mental
low-fr
to
the
oscillator
phase
noise
κ=
− amplitude
. at
As(13)
illustrated
in Fig.
5,a th
side-bands
ω0, ±∆ω.
xcfrom
=!
(12) This
the
largest
vibration
before
a bifurcation.
imum usable
vibration
amplitude
can be
estimated
√
may
have
si
2
sented
here
is
The electrostatic
nonlinearity
limits
the
resonator
drive
the
th
8k
12k
low-frequency
1/f
-noise
can
be
considera
amplitudes.
The
critical
amplitude
before
a
bifurcation
is
3
3Q|κ|
in This
the resonator
causes as
aliasing
of low-frequency
largest vibration
amplitude
before
a bifurcation.
biasing also
critical
vibration
amplitude
can
be
written
[4],
[15]:
vel as at the
high-vibration
amplitudes;
the
amplitudethe
magnitud
the thermal noise floor. The
typical
lowsource
carrier
side-bands.
with
a
charg
critical
vibration
amplitude
can
be
written
as
[4],
[15]:
by
Defining
drive
level
as the motional
current
through
equency curvegiven
is not a single
valuedthe
function
and
oscillasources
present
at the resonator input
are
where:
noise
tainin
2
may
be
signi
The aliasing
of low-frequency predict
noise
can
be
v
taining
elements
(transistors)
in
the
oscilla
the
resonator,
the
maximum
drive
level
is
given
by
(8)
and
!
ons may even become chaotic [1] [4]. Therefore,
the max- xc =
,
(12)
2
2 2
ter scale
[18]
may
h
3k
5k
In
this
se
2e k0e√
mental
to
the
oscillator
phase
noise
perform
1e k0e
xc = ! √
,
(12)
κ
=
−
.
(13)
may
have
a significant amountsented
of 1/f here
-noise
um usable vibration(12)
amplitude
canbe
be written
estimatedas:
from
3
3Q|κ|
and can
2
is
8k
12k
biasin
low-frequency
1/f
-noise
can
be
considerably
la
3 3Q|κ|
trostatic
cou
biasing also may be noisy, especially
if it
e largest vibration amplitude before a bifurcation. This
the magnitud
the
thermal
noise
floor.
The
typical
low-freque
with
Defining
the
drive
level
as
the
motional
current
through
static
transdu
with
a
charge
pump.
Notably
mechanica
max
predict
noise
tical vibration
amplitude can be written
as [4],
[15]:= ηω0 xc .
where:the
i
(14)
where:
m
sources present
resonator
input
arethis
thesca
a
resonator,
the maximum
drive
isthe
given
byif(8)the
and
may
may level
be at
significant
resonator
is
In effects
seb
spring
kaajakari et al.: analysis
phase noise
oscillators:
on ultrasonics,
2transactions
2
2 and
2 micromechanical
(12)
can be written
as:
taining
elements
(transistors)
inthe
thenoise
oscillator
ci
2 3kof
terieee
scale
[18].
However,
up-mixi
ter
sc
5k
kand
3k
k
5k
k
trostatic
cou
2e k0e
2e
0e
1e
0e
1e
0e
tion
is an
op
!andκ√
xc = As
(12)
ferroelectrics,
frequency
control,
vol.Section
52, .no. 12,
december
2005
= be, seen
− in
(13)
will
IV,
the
maximum
drive
level
κ
=
−
.
(13)
may
have
a
significant
amount
of
1/f
-noise
[17].
R
2
sented
here
is
not
limited
to
a
specific
nois
static
transdu
max
2
sented
8k
12k
8k
12k
im = ηω0 xc .
(14)
3 3Q|κ|
up-mixing
Ali M. Niknejad
of California, Berkeley
EECS
142,
Lecture
20m
sets the
noise floorUniversity
obtainable
with
microresonator-based
biasing
also
may be noisy,
if 1,itSlide:
is
imp
the magnitude
of theespecially
noise
at
resonator
in
spring
effects
the
m
Defining
the
drive
level
as
the
motional
current
through
Monday, May 4, 2009
tion
is an
predict
noise aliasing
the
sis,resonator.
including
with
a charge
Notably
mechanical
1/fop
Defining
thebedrive
level
as
the
motional
current
through
As will
seen in
Section
IV,
thepump.
maximum
driveinlevel
Non-Linear Spring Constant
•
•
•
Noise Aliasing in Resonators
tions on ultrasonics, ferroelectrics, and frequency control, vol. 52, no. 12, december 2005
te nonlinear model is used
duction [14].
spring constants are obthe electrostatic force:
∂C
.
∂x
(10)
second order gives for the
2
2e x )
=
Fig. 4. Schematic representation of noise aliasing. Low-frequency
noise un (∆ω) present at filter input is aliased to carrier side-bands
ω0 ± ∆ω due to mixing in resonator.
• As we(11)have learned in our phase noise lectures, 1/f
3
2
, and k2e = 2 .
2d
d
noise can alias to the carrier through time-varying
ng k0e is negative, and thus
the low-frequency
noise signal at
∆ω multiplied
with the
and
non-linear
mechanisms.
Since
1/f
noise
is
high
for
Of the nonlinear
terms,
the
carrier signal at ω0 results in additional near-carrier noise
be shown to dominate [1].
As illustrated in Fig. 5, this mixing
side-bands
at ω0 ±∆ω.
CMOS, this
is a major
limitation
y limits the resonator drive
in the resonator causes aliasing of low-frequency noise to
mplitudes; the amplitudecarrier side-bands.
valued function and oscillaThe aliasing of low-frequency noise can be very detri[1] [4]. Therefore, the maxmental to the oscillator phase noise performance as
ude can be estimated
from
kaajakari et al.: analysis
of phase noise
micromechanical
oscillators: ieee
transactions
low-frequency
1/fand
-noise
can be considerably
larger
than on ultrasonics,
e before a bifurcation.
Thisand frequency control, vol. 52, no. 12, december 2005
ferroelectrics,
the thermal noise floor. The typical low-frequency noise
n be written as [4], [15]:
sources present at the resonator input are the active susAli M. Niknejad
University of California, Berkeley
EECS 142, Lecture 1, Slide: 21
taining
elements
(transistors)
in
the
oscillator
circuit
that
2
Monday,, May 4, 2009
(12)
x) results
in up-converted
noise
current.gap
(b) S
A.isMixing
Due
toplacement
Capacitive
Current
Nonlinearity
mixed
to
a
higher
frequency
due
to
the
time
varying
anical
nonlinearities
springs and the maxlaw results inB.
mixing
noise
and signal
voltages,
un and u
Mixingof
Due
to Capacitive
Force
Nonlinearity
(c)
capacitance. The
capacitance
is:spring force results in mixing of low
drivefrom
actuated
restively.
(c) Nonlinear
ated
mechanical
Fig.
illustrates
how
low-frequency
noise
The
mainvoltage
up-conversion
avenue
illustrat
n at
Fig. 5.5(a)
Different
mixing
mechanism
for"second
thevibrations.
noise
un atu
∆ω
to is∆ω
#
and signal
frequency
He
rly on displacement
x
0the
Fig.
5(b).
Due
tothe
square
force
law,
the gap
low-frequ
high-frequency
noise current.
(a)
Time-varying
capacitor
(plate
disis
mixed
to
a
higher
frequency
due
to
time
varying
force
C(x)
≈
C
1
+
,
(16)
0
rings and the maxnoise voltage
undat ∆ω(b)
is mixed
with
the high frequ
placement x) results in up-converted
noise current.
Square
force
br
capacitance
is:
signal
voltage
uac atu ω0and
. Theu capacitive
forcein
is give
ed from mechanical capacitance.
law results inThe
mixing
of
noise
and
signal
voltages,
,
respecn
ac
ing the relation between the
signal
voltageuct
andx
where
x
is
the
resonator
displacement
the
excitation
"
#
tively. (c)
Nonlinear
spring force results
in2 ∂C
mixing
ofat
low-frequency
2
!
0
U
(U
+
u
+
u
x0 "
displacement
given
by
(2)
and
(8),
the
x
icroresonator
dc
ac
n ) Cup-conver
0
0
the
Fn1=+
≈,
1+
2 p
and signal frequency
vibrations.
C(x)
≈
C
(16)
frequency.
The current
current
through
the
resonator
due
to
the
2
∂x
2
d
dw
0
due to capacitive
current
mixing
can
be
tance
d
ng effects, the capaci- voltage un is then:
would
c
where the first three
terms of power series expansion
inbeen
= 2Γ
uac
unexcitation
,
where
x
is
the
resonator
displacement
at
cthe
ing
the
relation
between
the
signal
voltage
and
resonator
0
capacitance
have
kept.
The
products
uac un and
roresonatorof noise.
wn-conversion
∂(C(x)u
)
C
nresult(8),
0the resonator
in
up-converted
noise
at ωdue
± ∆ω.
Thus,
the
displacement
given
by
(2)
and
up-converted
0 noise
frequency.
The
current
through
the
to
the
=
≈
ẋ
u
+
C
u̇
.
(17)
i
n
0
n
0
n
ntity:
where∂t
wecurrent
have
current
aliasing
facto
at ω0 ±defined
∆ω
is: the
d
current
due
to
capacitive
mixing
can
be
written
as:
voltage
u
is
then:
n
effects, the capaciC0
C0 x0
2
Qω
η
F
(ω
±
∆ω)
≈
u
u
+
2
Udc
un .
c
n
0
ac
n
0
The first term inin(17)
isresponsible
for
the
noise
up)conversion
t + cos (ω0 of
− noise.
∆ω) t,
=
2Γ
u
u
,
(18)
d
d
d
which
c
ac
n
Γc =
.
∂(C(x)un )
C0
2kU
conversion
and
results
in
noise
current
at
ωdc
Us-(19
(15)
=
≈
ẋ
u
+
C
.0 ± ∆ω.(17)
i
by
n
0
n
0 u̇n
y:
(a)
(b)
∂t the This
d aliasingnoise
where we have defined
current
factor:
high-frequency
force near the resonator
c
Mixing: Capacitive Current Non-Linearity
Itisi
As (15) nance
shows,
the
given
by
(18)
excites
thecurrent
resonator, iand
the
displacement
n
2
(25).
by
(3).
Close
to the resonance,
thenoise
noise-induced
disp
first
term
in
(17)
isresponsible
for
the
up+ cos (ω0 − This
∆ω) t,term isThe
Qω
η
amplitudes
at
frequencies
ω
±
∆ω.
0
0
usually much smaller
(by
10X
~
100X)
Γc =ment is: .
(19) ble I)
conversion
and
results
in
noise
current
at
ω
±
∆ω.
Us(15)
2kUdc
0
than mixing due to the force non-linearity xF ≈ −jQ Fn ,
brack
n
As (15) shows, the current icn given by (18)
has kequal ing co
amplitudes at frequencies ωand
∆ω.
capac
resulting noise current is:
0 ±the
•
iF
n = η ẋn = −jηω0 xn .
kaajakari et al.: analysis of phase noise and micromechanical oscillators:
ieee transactions
on ultrasonics,
Substituting
(21) and
(22) to (23) and using
ferroelectrics, and frequency control, vol. 52, no. 12, december 2005
−jQηuac /k leads to:
Ali M. Niknejad
Monday, May 4, 2009
University of California, Berkeley
iF
un ,Lecture 1, Slide: 22
F uac142,
n = 2ΓEECS
2
!the low-frequency
"
F
Fig. 5(b). Due
square
force
law,
n
U 2to
∂CtheF
(U
+
u
+
u
)
C
x
dc
ac
n
0
0
(22)
Fn =
≈xn F≈ −jQFn ,
1+2
,
xn is
≈ −jQ
,with
noise voltage u
at ∆ω
mixed
frequency
2 n∂x
2
d the high
d (22)
k
(20)
k
nalysis of phase noise and micromechanical
oscillators
2325
signal
voltage uac at ω0 . The capacitive
force is given by:
and the
resulting
noise
current
is: series expansion of the
and
the
resulting
noise
current
is:
where
the
three
terms
of power
B. Mixing
Due
tofirst
Capacitive
Force
Nonlinearity
2 uac!un and xun"
capacitance
have been
kept.
The+products
U 2 ∂C
(U
+
u
u
)
C
x
dc
ac
n
0
0
F
i
=
η
ẋ
=
−jηω
x
.
(23)
The
second
main
up-conversion
avenue
is
illustrated
in
F
n
Fresult
≈=
+ 2force ,(23)
at
ω0 0± n∆ω.
Thus,1 the
n η ẋnoise
n = in up-converted
i
=
−jηω
x
.
n
0
n
n
Fig. 5(b). Due2to the
square
force law, the
low-frequency d
∂x
2
d
at
ω
±
∆ω
is:
0
(20)
noise voltage un at ∆ω is mixed with the high frequency
Mixing: Capacitive Force Non-Linearity
and (22)
(23)by:and
signal Substituting
voltage uac at ω0 .(21)
The capacitive
forceto
is given
(b)
using x0 =
C0 x0 and using x0 =
Substituting
(21)
to
(23)
−jQηuac /k leads
to:and C(22)
0
F (ω(U
≈ 2 uac
2
Udc
un .
! un +
0 ±+∆ω)
where theU 2first
terms
expansion
of the
∂Cn three
uac
+ un )dCof
x0 " series
dc
0 power
d
d
= leads
≈ to:
1+2
,
−jQηuFacn /k
(21)
F
2
∂x
2
d
d
capacitance have been
uac un(24)
and xun
in kept.
= 2ΓF The
uac unproducts
, (20)
result
in first
up-converted
noise
at near
ω0 of±the
∆ω.
Thus,resothe force
Fpower
This
high-frequency
noise
force
resonator
where
the
three terms of
series
expansion
the
i
=
2Γ
u
u
,
(24)
F
ac
n
where
we
have
defined
the
force
aliasing
factor:
n
have
kept.resonator,
The productsand
uac uthe
xun
n and
excites
displacement
is given
at capacitance
ω0nance
± ∆ω
is:beenthe
result in up-converted noise at ω0 ± ∆ω.
Thus, the force$
#
by (3). Close to the resonance,
the noise-induced
at ω0 ± ∆ω is:
Qω0 η 2
QηUdc
displacewhere we
have
ment
is: defined
ΓF ≈ theCforce
1 − j2aliasing
.factor:
(25)
C
x
0
0
0
kd2
dc C0 u
C0 2kU
x0ac un +
F
(ω
±
∆ω)
≈
Udc un .
(c)
n
0
Fn (ω0 ± ∆ω) ≈
uac un + 2# Udc un .
dd d Fn (21)d $
d
d
F
2
xin
−jQ ,is
(22) (21)
Qω
QηU
n ≈
0η
dc
nism for the noise voltage un at ∆ω to
Here
the
first
term
brackets
due
to
the
square
k
(b)
Γ
≈
1
−
j2
.
(25)
F
a) Time-varying
capacitor
(plate
disThis
high-frequency
noise
force
near
the
resonator
resoforce
law
[product
u
u
in
(20)],
and
the
second
term
(b) The form is the same as the capacitance
acdcn
non-linearity,
2kU
kd
verted noise current. (b) Square force
nance
excites
the
resonator,
and
the
displacement
is
given
the resulting
noise
current
is: near
Thisinand
high-frequency
noise
force
the resonator
reso
brackets
is
due
to
the
nonlinear
capacitance
[prodClose
to the resonance,
the noise-induced
displacend signal voltages,
and umagnitude
ac , respec- by (3). is
butunthe
much
higher
and
dominates
for
uct
xu
in
(20)].
If
we
had
kept
only
the
first
term of
nance
excites
the
resonator,
and
the
displacement
issquare
given
n
ment is:
ce voltage
results inumixing
of
low-frequency
F
se
at
∆ω
to
Here
the
first
term
in
brackets
is
due
to
the
n
in = η ẋncapacitor
= −jηω
(23)
0 xn . has
the
power
series
expansion
of
capacitance
[linear
capacimost
resonators.
A
linear
coupling
much
s.
by (3). Close to the
resonance,
the noise-induced displace
Fn
F
g
capacitor (plate dis- force
x
≈
−jQ
,
(22) aliasing
law
[product
u
u
in
(20)],
and
the second
n
tance, C(x) = Cn0 (1ac
+ x/d)],
then the force
factor term
k
reduced
up-conversion
ment
is:
rrent. (b) Square
force noise
Substituting
(21) and (22) to (23) and using x0 =
would
be:
in brackets
is
due
to is:the nonlinear capacitance [prod
and
the
resulting
noise
current
−jQηu
es,
uac
, respeche usignal
and resonator
ac /k leads to:
n andvoltage
kaajakari et al.: analysis
of
phase
noise
and
micromechanical
oscillators:
ieee
transactions
onthe
ultrasonics,
uct
xu
in
(20)].
If
we
had
kept
only
first
term
o
2
F
n
n
F
F
and (8),
the ferroelectrics,
up-converted
noise
Qω
η
ixing
of low-frequency
and frequency control, vol. 52, no.in12,
2005
= december
η ẋn = −jηω
x0n . −jQ
(23)
0≈
x
,
(22)
F
Γ
≈
(linear
C),
(26)
n
F
i
=
2Γ
u
u
,
(24)
the
power
series
expansion
of
capacitance
[linear
capaci
F ac k
n
Ali M. Niknejad
University of California, Berkeley n2kU
EECS 142, Lecture 1, Slide: 23
urrent
mixing can be written as:
dc
•
Monday, May 4, 2009
and (22) to (23) and using x0 =
tance, Substituting
C(x) = (21)
C (1
+ x/d)], then the force aliasing factor
The up-conversion
due
to≈
nonlinear
spring
forc
=
H(ω)F
.
at ω ± ∆ω is:xn avenue
n
substituting
x
=
x
+
x
,
the
up-converted
noise
substituting x =0x0 + xnn , the up-converted
is
k noise forcefor
0
(a)
is illustrated in Fig. 5(c). The
forceC0due
C0
x0 to the noise voltag
Fn (ω0 ± ∆ω) ≈
uac un + 2
Udc un .
d
d
d
Fn = ηun results
inklow-frequency
resonator
k
(21) vibration
F
=spring
2k0kk11xx0effects,
xx
..
(28
F
2k
Due
to
the
nonlinear
these
low-fr
nn
0
n=
n
(b) Because these vibrations are far from the resonance, th
This high-frequency noise force near the resonator resovibrations
are
multiplied
with
the vibrations
at th
amplitude
is
given
by:
nance
excites
the
resonator,
and
the
displacement
is
given
The
resulting
currentcan
can be
be evaluated
as as
in Section
II
The
resulting
current
evaluated
in
Sectio
by
(3).
Close
to
the
resonance,
the
noise-induced
displacefrequency.
Assuming spring force
F
=
k
x(1
+
k
0
B. Assuming
is
dominated
b
ment is:that the nonlinear spring
ηu
n
B.substituting
Assuming
that
nonlinear
spring
is dominat
x0n +
=
≈
.
(27
n
x=
xthe
xH(ω)F
,
the
up-converted
noise
the capacitive
effects
given
by
(11),
the
up-converted
nois
n
F
n
k
xF
≈ −jQ ,
(22)
n
the capacitive
effects
given
by
(11),
the
up-converted
k
current due to nonlinear spring mixing is given by:
thethe
nonlinear
these low-frequenc
and
resulting noise
current
currentDue
duetoto
nonlinear
spring
mixing
Fknkspring
= 2kis:effects,
0k
1 x0 xn .is given by:
vibrations are multiplied
with
vibrations
at the sign
in==
2Γ
,
(29
k uthe
ac0 xunn
iF
η
ẋ
=
−jηω
.
(23)
n
n
k
frequency. Assumingi spring
force
F ,= k0 x(1 + k1 x) an
=
2Γ
u
u
k tobe
ac
n
The
resulting
current
evaluated
n the
Substituting
(21)
and can
(22)
(23)
and usingfactor:
x0 =as in Sec
where
we
have
defined
spring
aliasing
substituting
xac=/k xleads
0 +to:xn , the up-converted noise force is
−jQηu
Mixing: Non-Linear Spring Force
B. Assuming that the nonlinear spring is domin
2u u , 4 aliasing (24)
k
where
we
have
defined
the
spring
factor: (28
i =3Q
2Γ
ω10xη(11),
Undc. the up-convert
F
=
2k
k
x
0
0
the capacitive effects
given
by
Γk n= j
.
(30
2
3
2daliasing
k factor:
where we have defined the force
current
due to nonlinear
spring
2
4mixing is given by
3Q
ω
η
# be
$dc as in Section II
The resulting current
can
evaluated
0QηU U
Qω η
=2kUjnonlinear
≈
1 − j2
. .
(25)
D. Comparison
ofΓΓkMixing
Mechanisms
B.
Assuming
that
the
spring
is
dominated
b
2
3
kd
(c)
2d
k
k
inis =
2Γ
uacthe
unup-converted
,due
ksmall
Amplitude
of
noise
at
low-frequency
very
the
capacitive
effects
given
by
(11),
nois
•
Fig. 5. Different mixing mechanism for the noise voltage u at ∆ω to
Here the first term in brackets is due to the square
Thedis- ratio
ofnonlinear
aliasing
factors
due
the
up
high-frequency noise current. (a) Time-varying capacitor
(plate
forceto
law
[product
u uspring
in (20)],mixing
and
the to
second
termcurrent
current
due
is
given
by:
tox) results
resonator
Q.current.
noise
is
up-converted
through
D.The
Comparison
of
Mixing
Mechanisms
placement
in up-converted noise
(b) Square
force
in
brackets
is
due
to
the
nonlinear
capacitance
[prod-by (19) an
conversion
and defined
nonlinearthe
spring
mixing
given
law results in mixing of noise and signal voltages,where
u and
u , respecwe have
spring
aliasing
factor:
uct xu in (20)]. If we had kept only the first term of
F
n
F
0
F
2
ac n
dc
dc
n
ac n
the spring non-linearity.
(30), respectively,
is:expansion
ikn = 2Γ
uac un , [linear capaci(29
the power series
ofkcapacitance
= C (1 + x/d)],
then 2
the force
4aliasing
The ratiotance,
of C(x)
aliasing
factors
due
to factor
the curren
!
!
"
#
3Q
ω
η
U
0
dc
would
be: three, about 500X
2
This term is theconversion
smallest
of
the
!
!
where
we
have
defined
the
spring
aliasing
factor:
ing •
the relation between the signal voltage
and
resonator
Γ
1
dk
Γc k! ==spring
j
.
and
nonlinear
mixing
given
by (19
!
2
3
.
(31
displacement given by (2) and (8), the up-converted noise
Qω
η
2d
k
!
!
C),
(26)
than
capacitance
non-linearity.
3Q 2(linear
ηUDC
currentsmaller
due to capacitive
current the
mixing
can
be written
as:
(30),
respectively,
is:ΓkΓ ≈ 2kU
4
n
ac
tively. (c) Nonlinear spring force results in mixing of low-frequency
and signal frequency vibrations.
n
0
F
0
2
dc
3Q
ω0 η Uondcultrasonics,
kaajakari et al.:
analysis
of
phase
noise
and
micromechanical
oscillators:
ieee
transactions
Γk =as jthe current2 aliasing
.factor given
(30
icn = 2Γc uac un ,
which
is the2005
same
3
ferroelectrics, and frequency control,
vol.Substituting
52,(18)
no. 12,
december
D.
Comparison
of
Mixing
Mechanisms
2d k
microresonator
(Ta
! typical
!
"
#EECS
by (19).
2parameters
Ali M. Niknejad
University of California,
Berkeley
142, Lecture 1, Slide: 24
!interest
!|Γ
where we have defined the current aliasing factor:
Γ
1
It is ofgives
to ccompare
the500.
twodk
terms
in brackets
in
c
ble
I)
into
(31)
/Γ
|
≈
Thus,
we can
conclud
k
! !
Monday, May 4, 2009
=
.
,2@@-+0&?! 34! /! <98+-=</8%9.&?! ,9;98-.! ,23,0+/0&! /,! ,%-B.! 9.! '9DC! EC65C! ! $%&! <&0/;F/9+!
FBAR Resonator
9.0&+:/8&,!,&+G&!/,!&H8&;;&.0!+&:;&80-+,I!:-+<9.D!/!%9D%!J!/8-2,098!+&,-./0-+C!!$%&!'()*!
%/,!/!,</;;!:-+<!:/80-+!/.?!-882@9&,!-.;4!/3-20!655!<!H!655!<C!!
!"#$%&'(#)
!
!
1023* 45*6/0,7*
*+&
!
!
*",
-+
*+&
$99%!:%
-+!
!
!
8*-+*%
45*6/0,7*%
!
'9DC!EC65K!LM&:0N!,0+2802+&!L+9D%0N!@%-0-D+/@%!-:!/!'()*!+&,-./0-+C!
!
“MEMS” technology is the Thin Film Bulk
• Another
$%&!'()*!+&,-./0-+!8/.!3&!<-?&;&?!2,9.D!0%&!O-?9:9&?!(200&+B-+0%!P/.!Q4R&!89+8290!
Wave Acoustic Resonators (FBAR)
/,! ,%-B.! 9.! '9DC! EC66! 1M/+,-.557C! ! M<I! S<! /.?! *<! /+&! 90,! <-09-./;! 9.?280/.8&I!
It uses a thin layer of Aluminum-Nitride piezoelectric
•8/@/890/.8&!/.?!+&,9,0/.8&!+&,@&809G&;4C!!S
-!<-?&;,!0%&!@/+/,9098!@/+/;;&;!@;/0&!8/@/890/.8&!
material sandwiched between two metal electrodes
3&0B&&.! 0%&! 0B-! &;&80+-?&,! /.?! S@6! /.?! S@E! /88-2.0,! :-+! 0%&! &;&80+-?&! 0-! D+-2.?!
• The FBAR has a small form factor and occupies only
8/@/890/.8&,C!!M-,,&,!9.!0%&!&;&80+-?&!/+&!D9G&.!34!*
5I!*@6!/.?!*@EC!!
about 100µm x 100µm.
Ali M. Niknejad
Monday, May 4, 2009
!
M<
S<
University of California, Berkeley
*<
EECS 142, Lecture 1, Slide:
25
!
8/@/890/.8&!/.?!+&,9,0/.8&!+&,@&809G&;4C!!S-!<-?&;,!0%&!@/+/,9098!@/+/;;&;!@;/0&!8/@/890/.8&!
$%&! '(&)*&+,-! (&./0+.&! 0'! 1%&! 2345! (&.0+610(! 7.! .%08+! 7+! 279:! ;:<;:! ! $%&! 2345!
FBAR Resonance
3&0B&&.! 0%&! 0B-! &;&80+-?&,! /.?! S@6! /.?! S@E! /88-2.0,! :-+! 0%&!=&%6>&.!
&;&80+-?&!
?7@&!0-!6!D+-2.?!
,6/6,710(! &A,&/1! 61! 71.! .&(7&.! 6+B! /6(6??&?! (&.0+6+,&:! ! C1! 6,%7&>&.! 6+
8/@/890/.8&,C!!M-,,&,!9.!0%&!&;&80+-?&!/+&!D9G&.!34!*5I!*@6!/.?!*@EC!!*+?06B&B!D!0'!E0(&!1%6+!6!<FFF:!!!!
M<
!
S<
!
*<
S5
S@6!
*@
!
!
*5
S@E!
!
!
*@
!
%&'()*+,(-.!/
!"""
!
N6(6??&?!
(&.0+6+,&!
!
!""
!
!"
!
'9DC!EC66!S9+8290!<-?&;!-:!0%&!'()*!+&,-./0-+C!
!
!
!""#
"#
• Very similar to a XTAL resonator.
!
O&(7&.!
!
(&.0+6+,&!
!$!
!"$
01(23(+,4-.56/
Has two modes:
279:!;:<;!2(&)*&+,-!(&./0+.&!0'!1%&!2345!(&.0+610(:!
!
series and parallel
!"#"!$ %&'()*(+,-$./$01%2$2,-.)(*.3$
• Unloaded Q ~ 1000 !"#$%&'#(#)*+,-.#
be integrated directly with
• This technology will not$%&!D!'6,10(!0'!1%&!2345!(&.0+610(!7.!E0(&!1%6+!<FFFG!8%7,%!7.!E*,%!%79%&(!1%6+!1%&
DH'6,10(! 0'! 6+! 0+H,%7/!
IJ! (&.0+610(:!
! $%&! %79%! D!packaging
'6,10(! 6??08.! 7E/?&E&+16170+! 0'! ?08
CMOS, but there is a potential
for
advanced
?0..! '7?1&(.! 6+B! B*/?&A&(.! 10! 611&+*61&! 1%&! 0*1! 0'! =6+B! =?0,@&(.! 6+B! (&K&,1! 1%&! 7E69&
or procesing.
.79+6?.:!!C+!.0E&!6//?7,6170+.G!1%&!=6+B87B1%!0'!1%&.&!2345!'7?1&(.!7.!.*''7,7&+1?-!.E6??
Ali M. Niknejad
Monday, May 4, 2009
'0(!,%6++&?!'7?1&(7+9G!(&?6A7+9!1%&!?7+&6(71-!(&)*7(&E&+1!0'!E7A&(.!6+B!(&E0>7+9!1%&!+&&B
University of California, Berkeley
EECS 142, Lecture 1, Slide:
26
'0(! =6.&=6+BLC2! '7?1&(.:! ! $%&! %79%! D! 2345! (&.0+610(! 6?.0! .*=.16+176??-! 7E/(0>&.
/2$!9:;<6!!7%)*,-,/'%,!AE!)*F!AG!,2)%$!/2$!,)($!+@%%$*/!N@/!/2$-%!/%)*,+
)*F!=(G!,@(M!%$F@+-*=!/2$!+@%%$*/!*$$F$F!&'%!',+-..)/-'*!NJ!2).&6!!72$!/%)
1)#)+-/'%,!1
E!)*F!1G!/%)*,&'%(!/2$!)(#.-&-$%T,!/%)*,+'
FBAR Oscillator
F$,-=*$F!/'!'#$%)/$!-*!/2$!,@NR/2%$,2'.F!%$=-($!/'!'N/)-*!2-=2$%!+@%%$*/!$
HFF!
!
!E
!G
AG !
!
G
*$=)/-D$! %$,-,/)*+$! $
• Rm ~ 1 ohm
• gm ~ 7.8 mS used (3X)
• C1=C2=.7pF
!
• gm/Id ~ 19, Id ~ 205μA
• Start-up behavior shown
"
!"
# #E # G
Q.:%;;-250!
20-4.%,42!
0,.354.,!
!
Q.:%;;-250!
2/04.!54!
_bb!
&-2%4&!
.%&4-;!
`R354,42%-;!!
&05>2=!
!
!
<N!
!
""
!
AE !
9:;<!
!
<3!
13!
!
below:
!
a-%4!:5C30,..%54!
!
! )/! &%$U@$*+J! #6! ! 72
1E!
V!
!
W!
L(! 1(! <(!
!
1G!
9-=6!>6>S!C+2$()/-+!'&!)*!@./%)!.'8!#'8$%!9:;<!',+-..)/'
N2,-1@!.2-2,!
1)#)+-/'%,!1E!)*F!1G!/%)*,&'%(!/2$!)(#.-&-$%T,!/%)*,+'*F@+/)*+$! " !
5.:%;;-2%54!
*$=)/-D$! %$,-,/)*+$! $
" !E ! " ! G
# #E # G
G
"
! )/! &%$U@$*+J! #6! ! 72@,M! )! 2-=2$%! *$=
!
Ali M. Niknejad
Monday, May 4, 2009
! of California, Berkeley
$%&'!(')*!!+,-./0,1!.2-02/3!20-4.%,42.!56!-4!$789!5.:%;;-250'!
University
""
EECS 142, Lecture 1, Slide:
27
$%&!'&()*+&,!-%()&!./0)&!-&+1/+'(.2&!0)!)%/3.!0.!4056!7686!!$%&!/)2099(:/+!(2%0&;&)!(!
!
-%()&! ./0)&! /1! <8=,>2?@A! (.,! <BC#,>2?@A! (:! B#D@A! (.,! B##D@A!
/11)&:)! +&)-&2:0;&9E6!!!
!
!
Measured Results on FBAR Osc
E??F@
$%&!5//,!-%()&!./0)&!-&+1/+'(.2&!0)!'(0.9E!(::+0F*:&,!:/!:%&!%05%!G!4>HI!+&)/.(:/+6!$%&'!(')*!+%,!-./0/!/1!0.,!$234!/56%7780/9!
%)"
%!""
!
!
%!!"
!
O,D5,!,7,609/=,!
!"#"$% &'()*+',%-')*./)%
$234!
!
$/96,!,7,609/=,!!
:.,! /56%7780/9! %5! 5,71;<%85,=! >%0.! 8! "(?@A! 5B--7C! 8D=! =%55%-80,5! E#F
2/D=!>%9,5!!
! <BC#!,>2?@A! /56%7780%/D! 80! H'EEI! JKL'! ! :.,! @,85B9,=! L,9/! 0/! -,8M! /B0-B0! N/708&,! 5
*
+,-./*012./*3456789:
<8=!,>2?@A
!
!
%!("
!
UVSO!+%,!
V.):+*'&.:U)!
:.,!
/B0-B0! 5-,609B@! /1! 0.,! /56%7780/9! %5! 5./>D! %D! $%&'! ('E'! ! 3! 67,8D!
./0)&!19//+!
!
/<08%D,=!8D=!D/!67/5,;%D!5-B95!89,!/<5,9N,='!O,6/D=P!0.%9=P!1/B90.!8D=!1%1
!
!
%!'"
%!&"
!"#
!
!""# !
!$
;</=>/?6@*1AA./B*389:
E??F@
@,85B9,=!0/!<,!;"('E!=26P!;"Q'Q!=26P!;RE'E!=26!8D=!;R#')!=26!9,5-,60%N,
!"$
$%&'!(')*!+%,!-./0/!/1!0.,!$234!/56%7780/9!
!
4056!768J!K&()*+&,!-%()&!./0)&!-&+1/+'(.2&!/1!4>HI!/)2099(:/+6!
!
• Operate oscillator in “current
H!F&::&+!-%()&!./0)&!-&+1/+'(.2&!0)!/F:(0.&,!FE!/-&+(:0.5!:%&!/)2099(:/+!(:!:%&!&,5&!/1!
!
!
!
:.,!
/56%7780/9!
%5!
5,71;<%85,=!
>%0.!
8!
"(?@A!
5B--7C!
8D=! =%55%-80,5! E#FG! 1/9!
:%&! 2*++&.:! 90'0:&,! +&50'&! L@('#BM6! ! 4056! 76B#! )%/3)! :%&! /*:-*:! ;/9:(5&! )30.5! (.,!
!
!"#"$% &'()*+',%-')*./)%
!
limited” regime
! :.,! @,85B9,=! L,9/! !0/! -,8M! /B0-B0! N/708&,! 5>%D&! %
swing
~ 167 mV,
Pdc '&()*+&,!
~80! H'EEI! JKL'!
'&()*+&,! -%()&!
./0)&! (:! ;(+0/*)!
-/3&+! 2/.)*'-:0/.)6!
! $%&!/56%7780%/D!
/-:0'(9!
-%()&!
• Voltage
:.,! /B0-B0! 5-,609B@! /1! 0.,! /56%7780/9! %5! 5./>D! %D! $%&'! ('E'! ! 3! 67,8D! /B0-B0
104(:!μW
./0)&! 0)! <B##! ,>2?@A!
B#D@A! /11)&:! (.,!<BCC! ,>2?@A! (:! B##D@A! /11)&:! (.,! 0:! /22*+)!
!
/<08%D,=!8D=!D/!67/5,;%D!5-B95!89,!/<5,9N,='!O,6/D=P!0.%9=P!1/B90.!8D=!1%10.!.89@
3%&.!:%&!/*:-*:!;/9:(5&!)30.5!0)!BNO'P!30:%!:%&!/)2099(:/+!2/.)*'0.5!B#QRS6!!>&E/.,!
!
@,85B9,=!0/!<,!;"('E!=26P!;"Q'Q!=26P!;RE'E!=26!8D=!;R#')!=26!9,5-,60%N,7C'!
/-&+(:0.5! -/0.:T! :%&! /)2099(:/+! :+(.)0:)! 0.:/! :%&!
;/9:(5&!
90'0:&,! Berkeley
+&50'&!$%&'!('E*!SB0-B0!19,TB,D6C!5-,609B@!/1!$234!/56%7780/9'
3%02%! :%&!
Ali :%0)!
M. Niknejad
University
of California,
EECS 142, Lecture 1, Slide: 28
Monday, May 4, 2009
!