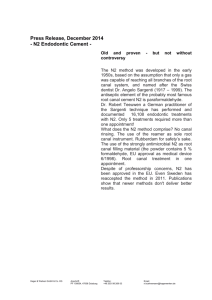
J Mar Sci Technol (2013) 18:310–323 DOI 10.1007/s00773-012-0209-7 ORIGINAL ARTICLE Computational fluid dynamics (CFD) prediction of bank effects including verification and validation Lu Zou • Lars Larsson Received: 5 March 2012 / Accepted: 13 December 2012 / Published online: 18 January 2013 JASNAOE 2013 Abstract Restricted waters impose significant effects on ship navigation. In particular, with the presence of a side bank in the vicinity of the hull, the flow is greatly complicated. Additional hydrodynamic forces and moments act on the hull, thus changing the ship’s maneuverability. In this paper, computational fluid dynamics methods are utilized for investigating the bank effects on a tanker hull. The tanker moves straight ahead at a low speed in two canals, characterized by surface piercing and sloping banks. For varying water depth and ship-to-bank distance, the sinkage and trim, as well as the viscous hydrodynamic forces on the hull, are predicted by a steady state Reynolds averaged Navier–Stokes solver with the double model approximation to simulate the flat free surface. A potential flow method is also applied to evaluate the effect of waves and viscosity on the solutions. The focus is placed on verification and validation based on a grid convergence study and comparisons with experimental data. There is also an exploration of the modeling errors in the numerical method. Keywords Bank effects Reynolds averaged Navier– Stokes method Hydrodynamic forces and moments Sinkage and trim Verification and validation 1 Introduction When a ship is traveling in a canal or a narrow channel, the flow becomes highly complex. Interactions occur between the ship and the side banks, as additional hydrodynamic L. Zou (&) L. Larsson Department of Shipping and Marine Technology, Chalmers University of Technology, 41296 Gothenburg, Sweden e-mail: zlu714@gmail.com 123 forces and moments generated by the vicinity of the banks act on the hull and influence ship motion. This phenomenon is named bank effects. When the distance between the hull and the canal boundary is reduced, the flow is accelerated and the pressure is accordingly decreased, which has an effect on the hydrodynamic characteristics. The produced hydrodynamic forces, especially in extremely shallow canals, may considerably affect the maneuvering performance of the ship, making it difficult to steer. The ship may collide with the side bank and/or run aground due to the ‘‘squat’’ phenomenon. Bank effects are thus extremely important for ship navigation. In the past few decades, many investigations on bank effects have been carried out, both experimentally and numerically. A notable event was the International Conference on Ship Maneuvering in Shallow and Confined Water: Bank Effects [1], at which the participants expressed concern about this problem and presented many interesting papers. Historical investigations about bank effects have mostly relied on experimental tools, such as model tests and empirical or semi-empirical formulae, which normally treat the bank effect as a function involving hull-bank distance, water depth, ship speed, hull form, bank geometry, propeller performance, etc. During the 1970s, Norrbin at SSPA, Sweden, carried out experiments and proposed empirical formulae to estimate the hydrodynamic forces for flooded [2], vertical [3] and sloping [3] banks. Li et al. [4] continued Norrbin’s investigations and tested bank effects in extreme conditions for three different hull forms (tanker, ferry and catamaran). The influence of ship speed, propeller loading and bank inclination was evaluated. Ch’ng et al. [5] conducted a series of model tests and developed an empirical formula to estimate the bank-induced sway force and yaw moment for a ship handling simulator. In recent years, comprehensive model tests in a towing tank have been J Mar Sci Technol (2013) 18:310–323 carried out at the Flanders Hydraulics Research (FHR), Belgium, to build up mathematical models for bank-effect investigations and to provide data for computation validation. Vantorre et al. [6] discussed the influence of water depth, lateral distance, forward speed and propulsion on the hydrodynamic forces and moments based on a systematic captive model test program for three ship models moving along a vertical surface-piercing bank. They also proposed empirical formulae for the prediction of ship–bank interaction forces. From extensive tests, Lataire et al. [7] developed a mathematical model for the estimation of the hydrodynamic forces, moments and motions taking into consideration ship speed, propulsion and ship/bank geometry. In addition, two parameters defining the distance to a bank of irregular geometry were proposed. Although experimental tools and empirical formulae are widely used for bank-effects prediction, they have their shortcomings. For example, empirical formulae are suitable only for cases with similar hull forms and conditions. Otherwise, the prediction is barely reliable. To establish a mathematical model, many systematic and expensive model tests are always required. However, the most important weakness of these tools is their inability to provide detailed information on the flow field, which can help explain the flow mechanism behind the bank effects. In view of this, researchers resort to using numerical (i.e., computational fluid dynamics, CFD) methods to deal with the phenomena of bank effects. Among existing CFD methods, the potential flow method is the most common. Newman [8] applied a Green function to predict the interaction force between a ship and an adjacent rectangular canal wall. Miao et al. [9] studied the case of a ship travelling in a rectangular channel and estimated the lateral force, yaw moment and wave pattern based on Dawson’s method. It was shown that the applied potential flow method was able to predict reasonable hydrodynamic forces for a water depth to ship draught ratio larger than 1.5, but it failed for smaller ratios. Lee and Lee [10] applied the potential flow method to estimate the hydrodynamic forces as a function of the water depth and the spacing between the ship and a wedge-shaped bank. Viscous flow computations were carried out by Lo et al. [11], who studied the bank effect on a container ship model using CFD software based on the Navier–Stokes equations. The effect of vessel speed and distance to the bank on the magnitude and temporal variation of the yaw angle and sway force were reported. Some details of the predicted flow field are available from this study. Wang et al. [12] recently studied the bank effects using a Reynolds averaged Navier–Stokes (RANS) method to predict viscous hydrodynamic forces on a Series 60 hull at varying water depth ratios (1.5, 3.0 and 10.0) and ship–bank distances. Available literature indicates that although empirical formulae and model tests have played an important role in 311 bank-effect investigations, the mechanism of the effect is still not fully explained, as the model test normally only produces global data, like forces and moments, but not details of the flow. Viscous methods, like the most widely used RANS method, can provide more details, which can enhance the understanding of the mechanisms. However, their application is still limited; only a few reports referring to this type of computation have been presented, yet some of them indicate promising results. In the framework of an ongoing project aiming at extensive CFD investigations of the hydrodynamic forces on the hull in restricted waterways, the present work intends to study the bank effects in the case of a ship moving in a shallow canal. By means of numerical methods, quantitative predictions of the most interesting hydrodynamic quantities, such as the sinkage and trim and the viscous forces on the hull are obtained. Since this is a validation study, emphasis is placed on formal verification and validation (V&V) and an investigation of modeling errors. 2 Computational method Generally in a RANS method, the fluid motion around a ship is governed by a system of equations consisting of the Navier–Stokes equations (1) and the continuity equation (2), describing the conservation of momentum and of mass. Assuming the fluid to be incompressible, the governing equations given in a Cartesian coordinate system read [13]: oui o 1 op o2 ui þ ðuj ui Þ ¼ þ Fi þ m ð1Þ q oxi ot oxj oxj oxj oui ¼0 ð2Þ oxi where ui(j) represents velocity components, xi(j) denotes coordinates, p is the pressure, v is the kinematic viscosity, Fi represents the body force (such as gravity) and q is the fluid density. For a three dimensional flow, i, j = 1, 2, 3. As four variables (ui(j), p) are present in the three-dimensional equations above, the Navier–Stokes equations combined with the continuity equation, establish a closure of the system of equations. Time averaging Eqs. 1 and 2 yields: oui o 1 op 1 o þ ðuj ui Þ ¼ þ Fi þ ð rji þ Rji Þ q oxi q oxj ot oxj ð3Þ oui ¼0 oxi ð4Þ ij denote the average velocity, pressure where uiðjÞ ; p and r and stress; Rji ¼ Rij ¼ qu0i u0j a symmetric quantity, 123 312 termed ‘‘Reynolds stress’’; u0iðjÞ represents the fluctuating velocity in time. As seen in Eqs. 3 and 4, the fluctuating values are all removed during the time-averaging, but new unknown variables, the Reynolds stresses Rji, are introduced. The Rji needs to be modeled to close the system of Eqs. 3 and 4, which then yield all the mean flow properties. 3 CFD solver A CFD solver for Ship Hydrodynamics, SHIPFLOW [14], is utilized in the present work to implement the CFD computations. It includes several modules with different, but associated functions. Two of the modules are used in the present work: XPAN, which is a solver for the potential flow based on a surface singularity panel method; and XCHAP, a finite volume method for solving the RANS equations. The XCHAP can compute complex geometries, owing to the capability of handling overlapping grids, e.g., rudder, shafts, brackets and vortex generators. It can also deal with the grids imported from external grid generators. The code contains several turbulence models and in this paper, the explicit algebraic stress model (EASM) [15] and the Menter shear stress transport (SST) k–x model [16] are adopted. The discretization of convective terms is implemented by a Roe scheme [17] and for the diffusive fluxes central differences are applied. A flux correction [18] is adopted to approach second order accuracy. An alternating direction implicit scheme (ADI) is utilized to solve the discrete equations. As for the boundary conditions, the available options are: inflow, outflow, no-slip, slip and interior conditions. Their descriptions are as follows. (a) Inflow condition specifies a fixed velocity equal to the ship speed and estimated values of k, x at an inlet plane; sets a zero pressure gradient normal to the inlet plane. (b) Outflow condition describes zero normal gradients of velocity, k, x and a fixed pressure at a downstream outlet plane. (c) No-slip condition simulates a solid wall boundary (e.g., a hull surface) by designating zero value to velocity components, k, normal pressure gradient, and treating x following [19]. (d) Slip condition specifies the normal velocity component and normal gradient of all other flow quantities (e.g., pressure) as zero. It simulates a symmetry condition on flat boundaries. (e) Interior condition describes the boundary data interpolated from another grid. J Mar Sci Technol (2013) 18:310–323 systematic investigations, a grid convergence study is always suggested. Its purpose is to provide some knowledge and understanding of the numerical error or uncertainty in the computation. It also helps to determine the minimum grid density (computing expense) for an acceptable level of accuracy in the computations. As a preliminary study, grid convergence computations were carried out for a model of the 2nd variant of the KRISO Very Large Crude-oil Carrier (KVLCC2) [20]. Its scale ratio was 1/45.714. Thus the principal dimensions of this model hull were: length between perpendiculars LPP = 7.0 m, beam B = 1.269 m, draught T = 0.455 m. No appendage was attached to the model. The model hull moved straight ahead at a speed U = 0.530 m/s (corresponding a Froude number Fr = 0.064 and a Reynolds number Re = 3.697 9 106) in a canal with two surfacepiercing vertical side banks. The computed condition was quite extreme: a water depth to ship draught ratio h/T = 1.12 and a non-dimensional ship-to-bank distance yB = 0.6B. A schematic diagram of the canal configuration is given in Fig. 1, indicating that the hull is moving close to the bank on the port side of the canal. To simplify the computation, effects of waves and sinkage and trim were assumed negligible. The speed was very low. Hence, the double model approximation was adopted and a flat free surface considered at z = 0. The computational domain was defined by seven boundaries: inlet plane (inflow), outlet plane (outflow), hull surface, flat free surface, seabed boundary, as well as two side banks. The inflow plane was located at 1.0LPP in front of the hull and the outflow plane at 1.5LPP behind the hull. The distance between two side walls was fixed as 10B to exclude the influence from the far side of the canal on the hull. As for boundary conditions, the no-slip condition was satisfied on the hull surface (no wall function was introduced and y? \ 1 was employed); the inflow/outflow condition was set at the respective inlet/ outlet boundary plane; the slip condition was set at the flat free surface (z = 0), the seabed and the side walls. For closing the RANS equations, the EASM turbulence model was adopted. Figure 2 illustrates the body-fixed and righthanded Cartesian coordinate system used in the computations. The axes x, y, z are directed towards the bow, to starboard and downwards, respectively. Figure 3 presents a general view of the grid distribution; the grids are coarsened for better illustration. As can be seen, the overlapping 4 Grid convergence study In this paper, a wide range of test conditions are to be considered and computed. For the assessment of the accuracy in numerical computations, especially in recent 123 Fig. 1 Canal configuration J Mar Sci Technol (2013) 18:310–323 313 Table 1 Grid sizes in grid convergence study No. Grid points hi/h1 (i = 1, 2, …, 6) Grid1 7943783 1.0 Grid2 4593870 1.189 Grid3 2815261 1.414 Grid4 1707270 1.682 Grid5 1003110 Grid6 605898 2.0 2.378 Fig. 2 Computational domain Fig. 3 Grid distribution (coarse grids) grids established by a cylindrical body-fitted H–O grid and a rectilinear H–H background grid cover the whole computational domain. More details of the grid generation will be given in the next section. In the study, the estimation of numerical errors and uncertainties followed the procedure by Eça et al. [21, 22]. A pffiffiffi uniform grid refinement ratio r ¼ 4 2 was utilized in generating the grid series. Six systematically refined grids were created to enable the curve fit by the least squares root method, so as to minimize the impact of scatter on the determination of grid convergence. From the finest (Grid1) to the coarsest (Grid6) density, the number of grid points are given in Table 1, where the grid refinement ratio is denoted by hi/h1. hi is the grid spacing of the ith grid, while h1 is the grid spacing of the finest grid. CF, CPV and X0 , Y0 , K0 , N0 are introduced in the error and uncertainty estimation. CF, CPV represent the frictional and viscous pressure resistance coefficients; X0 , Y0 , K0 , N0 stand for the non-dimensional longitudinal and sway force, roll and yaw moment, respectively. In most cases, these forces and moments are essential quantities in the prediction of ship maneuverability. The quantities are defined as follows: RF RPV ; CPV ¼ ; 0:5qU 2 SW 0:5qU 2 SW X Y ; Y0 ¼ ; X0 ¼ 2 0:5qU LPP T 0:5qU 2 LPP T K N K0 ¼ ; N0 ¼ 0:5qU 2 LPP T 2 0:5qU 2 L2PP T CF ¼ where SW is the wetted hull surface area. ð5Þ Grid convergence tendencies of CF, CPV and X0 , Y0 , K0 , N0 are presented in Fig. 4a–f, together with fitted curves (including the fits from a theoretical order of accuracy pth = 2.0) and extrapolated solutions S0. Note that the coarsest Grid6 is dropped from the curve fit, as it is too coarse and contaminates the results. As can be seen, the resistance coefficients converge well with an increasing number of grid points. The fitted curves go through all the solutions. The convergence of CF is most reasonable (see Fig. 4a). Its convergence rate p (=3.55) is closer to the theoretical one and is only about half of the convergence rate for CPV. The larger p value for CPV is probably a combined effect of scatter and grid independence in solutions of Grid1–Grid4. The X0 , Y0 forces and K0 moment are more scattered (see Fig. 4c–e). The X0 and K0 solutions apparently oscillate around the fitted curves (oscillatory convergence), and are almost independent of the grid density, producing fitted curves as straight lines (p ? 0). The Y0 solutions present a slightly better convergence trend, but still very slow. The most satisfactory grid convergence appears in the N0 solutions, as the points are all on the fitted curve, and most importantly, the observed order of accuracy is identical to the theoretical one, p = pth = 2.0. The estimated numerical uncertainties are listed in Table 2 for Grid1, Grid2 and Grid3. Oscillatory convergence in CPV and X0 , K0 is demonstrated in the uncertainty estimation, since USN fluctuates slightly between Grid1, Grid2 and Grid3. Uncertainties in the other three quantities CF and Y0 , N0 tend to be converged. Y0 presents a slower convergence in USN, like the solution tendency shown in Fig. 4d. USN in Y0 drops about 18 % from Grid3 to Grid1, while the reduction in CF and N0 is 37 and 47 %, respectively. From this study, it seems very difficult to obtain grid convergence in bank-effects computations, at least for extreme cases, as the predicted hydrodynamic quantities display either fluctuating or slow convergence, and even a fine grid discretization (i.e., approximately, 8 million grid points) does not help. However, there is always a concern about the computing expenses. The computing time and the numerical accuracy have to be balanced, and this suggests that a density similar to that of Grid3 can be adopted in further systematic computations of bank effects. 123 314 J Mar Sci Technol (2013) 18:310–323 Fig. 4 Grid convergences of CF, CPV and X0 , Y0 , K0 , N0 5.5 11.5 CPV (bank) fitted curve (p = 7.12) fitted curve (pth= 2.0) 11.0 S0 10.5 CPV ×103 CF ×103 5.0 4.5 4.0 3.5 0.0 -0.052 -0.054 1.0 1.5 9.5 9.0 CF (bank) fitted curve (p = 3.55) fitted curve (pth= 2.0) 0.5 10.0 S0 8.5 2.0 2.5 8.0 0.0 3.0 0.5 1.0 1.5 hi /h1 hi /h1 (a) CF (b) CPV 2.0 2.5 3.0 -0.040 X' (bank) fitted curve (p →0) fitted curve (pth= 2.0) -0.044 Y' X' -0.048 -0.056 -0.058 -0.056 Y' (bank) fitted curve (p =0.56) fitted curve (pth= 2.0) -0.060 S0 -0.060 -0.062 0.0 -0.052 0.5 1.0 1.5 2.0 2.5 -0.064 0.0 3.0 0.5 1.0 N' K' 0.022 -0.058 0.5 1.0 1.5 (e) K' Table 2 Numerical uncertainties of CF, CPV and X0 , Y0 , K0 , N0 X 0.0009 0 K N Y 0 0 p 3.55 7.12 0.56 0.004 2.00 |USN%S|1 7.69 14.53 3.32 24.45 4.95 4.54 |USN%S|2 |USN%S|3 9.29 12.17 14.59 14.45 3.34 3.33 26.21 29.91 4.91 4.90 6.67 8.54 5 Systematic computations The test case for bank-effects (ship–bank interaction) in the present paper was set up according to available captive model test data for a 1/75 scale model of the same hull as above, the KVLCC2, fitted with a horn-type rudder. The 123 2.0 2.5 3.0 N' (bank) fitted curve (p =2.00) fitted curve (pth= 2.0) 0.020 S0 hi /h1 CPV 3.0 0.018 -0.060 CF 2.5 0.024 K' (bank) fitted curve (p → 0) fitted curve (pth= 2.0) -0.056 0 2.0 (d) Y' -0.054 -0.062 0.0 1.5 hi /h1 hi /h1 (c) X' 2.0 2.5 3.0 0.016 0.0 0.5 1.0 1.5 hi /h1 (f) N' principal dimensions of the model were: LPP = 4.267 m, B = 0.773 m, T = 0.277 m; the body plan represented by solid lines (dashed lines denote a different but related hull form, KVLCC1) and the hull geometry with a rudder are presented in Fig. 5. The tests were performed in the shallow water towing tank at the FHR, in cooperation with the Maritime Technology Division of Ghent University, Belgium [23]. In the towing tank, straight-line tests (6 knots full scale) of the KVLCC2 model were conducted at three different under keel clearances (UKC), namely 50, 35 and 10 % of the draught, at different lateral positions and at a zero and a non-zero propeller rate with a fitted propeller. Here we will only use the zero propeller rate data. For the numerical computations, the test conditions were determined from the model tests, with the ship moving along one side of the towing tank at different distances to the bank. J Mar Sci Technol (2013) 18:310–323 315 In addition, three water depths, and two canal configurations with different side-bank geometries were included. The general plan was to investigate the influence of the water depth, ship–bank distance and bank geometry on hydrodynamic quantities. The canal configurations in the computations are shown in Fig. 6a and b, where the hull is moving close to the vertical bank (in Canal A) and the bank with slope 1:1 (in Canal B) at its starboard side. The non-dimensional ship–bank distance yB is defined as shown below, following the proposal by, e.g., Ch’ng et al. [5]: 1 B 1 1 ¼ þ ð6Þ yB 2 yP yS yP and yS represent the distance from the ship center-plane to the toe of the bank at the port and starboard side, respectively. This description thus takes both side banks into consideration, which is important due to the non-uniform bank geometries. The computed combinations of ship–bank distance yB and water depth h/T in Canal A and Canal B are presented in Table 3. As can be seen, there are six conditions in each canal, some of which are rather extreme, which puts the computational tools to a severe test. No waves were considered, since the tanker moved at a low speed: U = 0.356 m/s. The corresponding Froude number Fr = 0.055 and the Reynolds number Re = 1.513 9 106. The double model approximation was adopted, and no sinkage and trim was allowed. Since a propeller was fitted even in the resistance tests, the drag of the fixed propeller has been deducted from the measured resistance. Systematic computations were first carried out for Canal A. Thereafter, an analysis was made of the possible modeling errors, and finally computations for the more difficult Canal B were carried out utilizing the lessons learnt from Canal A. 5.1 Computational settings Fig. 5 KVLCC2 geometry with a rudder (a) Canal A (b) Canal B Fig. 6 Cross-sections of Canal A and Canal B, seen in the direction of motion Due to the asymmetry of the geometry and the flow field, the computational domain had to cover the whole hull in the canal. The computational settings for Canal A and Canal B were essentially the same. A sketch of the computational domain and the coordinate system is given in Fig. 7a. As seen in the figure, the computational domain is made up by seven boundaries like in the grid convergence study part. The flat free surface is considered at z = 0, while the seabed and the two side banks are placed at specific locations corresponding to the test conditions in Table 3. The coordinate system and the applied boundary conditions are defined in the grid convergence study. It should be mentioned that both the EASM and the Menter k–x SST turbulence model were used for the closure of RANS equations at different stages of the computations. Slightly more complicated overlapping grids were adopted here. As illustrated in Fig. 7b, the overlapping grid is built up by three components: a cylindrical H–O grid (fitted to the hull), a curvilinear O–O grid (fitted to the rudder) and a rectilinear H–H grid (fitted to the canal boundaries). The former two grids are immersed into the latter. The body-fitted H–O grid covers the main flow field around the hull, and two clusters of grid points are Table 3 Matrix of test conditions h/T yB Canal A 1.180 1.10 (UKC = 10%T) 1.316 1.961 2.431 0.758 s 1.50 (UKC = 50%T) 1.35 (UKC = 35%T) Canal B s s s 0.909 1.632 2.173 s s s s s s s s 123 316 J Mar Sci Technol (2013) 18:310–323 r ¼ Z=qgAw s ¼ M=qgIw (a) Computational domain and coordinate system (b) Grid distribution Fig. 7 Computational domain, coordinate system and grid distribution of Canal A and Canal B concentrated around the bow and stern regions so as to resolve the flow field more precisely. A small outer radius (0.5LPP) of the cylindrical grid is used for Canal A to save grid points and an even smaller radius (0.12LPP) of the cylindrical H–O grid is applied for Canal B. 5.2 Results In this section, results from varying water depths and ship– bank distances in Canal A and Canal B are presented. In addition to hydrodynamic forces X0 , Y0 and moments K0 , N0 , the mean sinkage and trim are reported. These two variables are of great engineering interest with respect to the UKC. The mean sinkage r and trim s are defined as: 123 ; ð7Þ where sinkage is positive downwards and trim positive bow-up. Z is the sinking force, M the trim moment, Aw the water plane area and Iw the longitudinal moment of inertia of the water-plane area about the center of floatation. In addition to the RANS computations, the steady state potential flow panel method XPAN in SHIPFLOW was used to compute the sinkage and trim (without rudder) for Canal A. The motivation was mainly to study the influence of neglecting the wave effects in the RANS method. In XPAN non-linear free surface boundary conditions are satisfied [14]. It is also of interest to compare the accuracy in the bank-effects simulation of two completely different numerical methods. All the predicted hydrodynamic quantities have been compared with the test data from FHR. It should be noticed that the measured data were obtained in a confidential project, so no quantitative values of the data and computed results can be presented in the following figures. Instead, the results for all yB and h/T variations are expressed in percent of the largest measured value of all variations. Specifically, the predicted sinkage and trim are normalized by the maximum measured sinkage and trim, respectively, the X0 , Y0 forces by the largest |Y0 |, and the K0 , N0 moments by the largest |K0 |. Absolute values of all maximum quantities are thus used in the normalization. In addition, the measured negative thrust from the non-rotating propeller is subtracted from the total longitudinal force to enable a straightforward comparison between computations and measurements. 5.2.1 Sinkage and trim in Canal A The predicted sinkage and trim in Canal A from the potential flow method and the RANS method (with the EASM model) are plotted in Figs. 8 and 9, coupled with the experimental data. Dashed lines indicate the zero level. Figure 8 shows the sinkage and trim versus the water depth ratio h/T at a fixed small ship-to-bank distance yB = 1.316. The sinkage and trim, in general, rise with decreasing water depth, especially at a water depth less than h/T = 1.35, revealing a significant shallow water effect. The results against the ship–bank distance yB at a fixed water depth h/ T = 1.35 are presented in Fig. 9. Similar tendencies are displayed, indicating a blockage from the bank: when the hull moves closer to the bank, the sinkage and trim increase. It is shown in Figs. 8 and 9 that the RANS method works very well in predicting the sinkage and trim, while the potential flow method fails to obtain a solution at the closest ship–bank distance and under-predicts the trim J Mar Sci Technol (2013) 18:310–323 317 (%) 160 σ (RANS_EASM) σ (potential) σ (EFD) σ %|σmax| , τ %|τmax| 120 80 40 0 -40 -80 τ (RANS_EASM) τ (potential) τ (EFD) -120 -160 1.0 Canal A: yB=1.316 1.1 1.2 1.3 1.4 1.5 1.6 h/T Fig. 8 Sinkage r and trim s versus h/T in Canal A (%) 160 σ (RANS_EASM) σ (potential) σ (EFD) Canal A: h / T=1.35 σ %|σmax| , τ %|τmax| 120 80 Fig. 10 RANS predicted axial velocity uX/U contour around the tanker in the horizontal plane (from top to bottom: z/LPP = 0, -0.032, -0.06) (Canal A: h/T = 1.1, yB = 1.316) 40 0 -40 -80 τ (RANS_EASM) τ (potential) τ (EFD) -120 -160 1.0 1.2 1.4 1.6 1.8 2.0 2.2 2.4 2.6 yB Fig. 9 Sinkage r and trim s versus yB in Canal A considerably at all other conditions. The predicted trim is only half the measured value. This may be due to the fact that there is significant flow separation along the hull, which influences the pressure at the stern. Thus, a large pressure difference between the bow and stern is produced. A pronounced flow separation around the stern at h/ T = 1.1 and yB = 1.316 is indeed predicted by the RANS method, as indicated in the non-dimensional axial velocity uX/U contours in Fig. 10. The potential flow method, however, is unable to simulate this effect, as verified by the predicted pressure distribution on the hull surface. Normalizing the pressure by 0.5qU2, pressure coefficient distributions from potential flow and RANS methods are displayed in Fig. 11. While the potential flow pressure is relatively symmetrical fore-and-aft, the suction under the bow has no correspondence under the stern in the RANS results. A much larger trim by the bow can thus be expected for this case. 5.2.2 Hydrodynamic forces and moments in Canal A The predicted forces and moments for Canal A by the RANS method are shown in the following figures, where Fig. 11 Pressure distribution on the hull surface (Canal A: h/T = 1.1, yB = 1.316). (Bottom view) upper potential flow, lower RANS only the zero level is given. Note that no result from the potential flow method is presented here, as it is indicated from the predicted sinkage and trim, as well as the pressure distribution in Figs. 8-11 that viscous effects cannot be neglected. Results for the X0 , Y0 forces and the K0 , N0 moments at a specific ship–bank distance, yB = 1.316, against the water depth ratio are shown in Fig. 12a and b. Results at a specific water depth ratio h/T = 1.35 against the ship–bank distance are shown in Fig. 13a and b. Compared with measurements, the tendencies of hydrodynamic forces and moments are captured well. As seen in Fig. 12a and b, when the hull bottom approaches the seabed, the X0 force and K0 moment increase, while the Y0 force (a suction force towards the bank) behaves in a different way. It increases slightly between h/T = 1.5 and 1.35, but drops rapidly between h/T = 1.35 and 1.1. The N0 moment shows a monotonic increase for diminishing water depth as well. However, magnitudes of the yaw moment are very small. In Fig. 13a and b, with the varying ship-tobank distance at h/T = 1.35, the hull is attracted to the bank but the bow is pushed away. 123 318 J Mar Sci Technol (2013) 18:310–323 (%) 120 (%) 125 Y' (RANS_EASM) Y' (EFD) 75 80 50 60 25 0 -25 -50 -75 -100 -125 1.0 X' (RANS_EASM) X' (EFD) Canal A: yB =1.316 1.1 1.2 Y' (RANS_EASM) Y' (EFD) 100 X'%|Y'max| , Y'%|Y'max| X'%|Y'max| , Y'%|Y'max| 100 1.3 1.4 1.5 40 20 0 -20 -40 -60 -80 -100 1.0 1.6 h/T (a) X', Y' force X' (RANS_EASM) X' (EFD) Canal A: h /T=1.35 1.2 1.4 1.6 1.8 2.0 2.2 2.4 2.6 yB (a) X', Y' force (%) 150 Canal A: yB=1.316 K' (RANS_EASM) K' (EFD) (%) 60 75 50 25 0 -25 N' (RANS_EASM) N' (EFD) -50 -75 1.0 1.1 1.2 1.3 1.4 1.5 1.6 h/T (b) K', N' moment Fig. 12 X0 , Y0 force and K0 , N0 moment versus h/T in Canal A K' (RANS_EASM) K' (EFD) N' (RANS_EASM) N' (EFD) 50 100 K'%|K'max| , N'%|K'max| K'%|K'max| , N'%|K'max| 125 40 30 20 10 0 -10 Canal A: h /T=1.35 -20 1.0 1.2 1.4 1.6 1.8 yB 2.0 2.2 2.4 2.6 (b) K', N' moment Fig. 13 X0 , Y0 force and K0 , N0 moment versus yB in Canal A While tendencies of the predicted force and moment correspond well with those of the measured data, the absolute level is not well predicted in some cases. The most obvious difference between computations and measurements is seen in the Y0 force, for which there is a more or less constant shift to lower predicted values. This tendency is seen clearly in Figs. 12a and 13a. To more quantitatively investigate the absolute accuracy, a formal validation study was made for hydrodynamic variables in an extreme condition: h/T = 1.1 and yB = 1.316. The validation follows the procedure proposed by the ASME V&V 20 2009 standard [24], in which the concepts of a validation uncertainty Uval (U2val & U2num ? U2D) and a comparison error |E| = |S - D| are introduced. Here S and D represent the simulated solution and experimental data, respectively. Unum is the numerical uncertainty and UD is the data uncertainty in the measurements. Assuming that the roundoff error in a computation is negligible, the numerical uncertainty mainly consists of iterative uncertainty UI due to the lack of convergence in the iteration process and grid discretization uncertainty USN caused by the limited grid resolution. According to the procedure, the validation result is to be interpreted as follows: if |E| B Uval, the modeling error is within the ‘‘noise level’’ imposed by the numerical and experimental uncertainty, and not much can 123 be concluded about the source of the error; but if |E| Uval, the sign and magnitude of E could be used as to improve the modeling. In the present work, the iterative uncertainty is quantified by the standard deviation of the force in per cent of average force over the last 10 % iterations and kept below 0.2 %, which is a negligible contribution to the numerical uncertainty Unum. Therefore, Unum is approximated as the grid discretization uncertainty USN in the grid convergence study; while the experimental data and data uncertainty are available from FHR. Note that UD is estimated as twice the standard deviation of measured variables in repeated captive shallow water model tests at FHR for the SIMMAN 2012 Workshop [25]. In this way, the precision error is accounted for, but not the bias error. The estimated uncertainties and comparison errors for hydrodynamics quantities X0 , Y0 , K0 , N0 are presented in Table 4, where the measured data (D) are used for normalization. It is seen that three quantities Y0 , K0 and N0 , exhibit a larger comparison error than the validation uncertainty, implying that there are significant modeling errors, in computations and/or measurements. The neglected bias error in the measured uncertainty corresponds to a modeling error and has not been investigated in the present J Mar Sci Technol (2013) 18:310–323 319 There are several potential sources of modeling errors in the bank-effect computations for Canal A. Examples include the computational domain size, neglect of free surface, non-free sinkage and trim, turbulence modeling, absence of propeller, and boundary condition on the bank/ seabed. First of all, the selected computational domain is composed of the boundaries of seabed, side banks, flat water surface, hull surface, inflow and outflow. The boundaries of flat water surface and hull surface are fixed, while the positions of seabed and side banks are decided according to the test conditions. In theory, the inflow and outflow boundaries should be kept far from the hull to diminish the effect on the solutions. In the computations presented above, their locations were defined from early experiences with 1.0LPP in front of and 1.5LPP behind the hull, respectively, yielding a total longitudinal size of 3.5LPP. If these two boundaries are not sufficiently far away from the hull, they may introduce some error to the results. To investigate the influence of the domain size, we computed the shallowest water case (h/T = 1.1 and yB = 1.316) as an example like in the validation study. With larger longitudinal size (1.5 times of the previous one), the X0 , Y0 forces and K0 , N0 moments reduced about 2.8%D. Recalling Fig. 12 and Table 4 of the previous results, the forces and moments are all under-predicted. The decreased results do not improve the validation, thus the domain size appears to be a not so important source of modeling error. Moreover, a large domain size also increases the grid number and consumes longer computing time, which is important for a series of systematic computations. Given these factors, the previous domain size was considered acceptable. As mentioned above, the wave effect is neglected in the RANS computations. Its influence on hydrodynamic quantities should be investigated. As shown in Figs. 8 and 9, the computation of sinkage and trim in Canal A indicates that without considering the waves in the RANS Table 4 Validation results of X0 , Y0 , K0 , N0 X0 Y0 K0 N0 |UD%D| 4.40 18.80 7.10 2.78 |USN%D| 3.27 8.38 3.57 6.92 |Uval%D| 5.48 20.58 7.95 7.46 |E%D| 1.85 71.99 27.19 18.94 (%) 140 X'%|Y'max| , Y'%|Y'max| 5.2.3 Investigation of modeling errors computations, the predicted sinkage and trim correspond very well with measurements. This shows that it is acceptable to neglect the wave effect when predicting the sinkage and trim at the present low speed and at relatively close ship–bank distances. However, the effect of the sinkage and trim on the other forces and moments, especially at small water depths, needs to be investigated. Thus, further computations with given sinkage and trim from prior RANS computations were carried out for the case with a variation of water depth in Canal A at yB = 1.316. Results including the initial sinkage and trim (r&s) are indicated by symbols and dotted lines in Fig. 14a and b, also containing the previous predictions (symbols and solid lines). From the comparisons, it is interesting to see that the influence of sinkage and trim is generally very small. However, it cannot be neglected for the K0 and N0 moments at the very shallow water depth (h/T = 1.1), where visible differences in the results are noted. Returning to Table 4, a quantitative comparison can also be made. The correction from sinkage and trim increases |Uval%D| for N0 to 8.34 % and reduces the |E%D| to 7.92 %, while for other quantities the improvement is not large enough to reduce E to the Uval level, so there must be other significant modeling issues. As for the turbulence modeling, the EASM model was used in the systematic computations, as this turbulence 120 100 80 60 40 20 0 -20 -40 -60 -80 -100 1.0 Y' (RANS_EASM) Y' (RANS_EASM_ σ&τ) Y' (EFD) X' (RANS_EASM) X' (RANS_EASM_ σ&τ) X' (EFD) Canal A: yB=1.316 1.1 1.2 1.3 1.4 1.5 1.6 h/T (a) X', Y' force (%) 140 K'%|K'max| , N'%|K'max| work, and neither has the absence of the side bank in the precision measurements. However, systematic investigations of the modeling in the numerical computations can be carried out. This is the topic of the next section. 120 100 80 60 40 20 0 -20 -40 -60 -80 1.0 K' (RANS_EASM) K' (RANS_EASM_ σ&τ) K' (EFD) Canal A: yB=1.316 N' (RANS_EASM) N' (RANS_EASM_ σ&τ) N' (EFD) 1.1 1.2 1.3 1.4 1.5 1.6 h/T (b) K', N' moment Fig. 14 X0 , Y0 force and K0 , N0 moment versus h/T in Canal A 123 320 J Mar Sci Technol (2013) 18:310–323 model is known to predict more accurate wake profiles in deep water, see e.g. [26], but in the present case, hydrodynamic quantities are under-predicted with this model. Therefore, the Menter k–x SST model was applied to evaluate the influence of the turbulence modeling. The focus was placed on computations with varying bank distance at the same water depth h/T = 1.35. Results are presented by dotted lines in Fig. 15a and b. There is a slight improvement in the prediction of the sway force Y0 (the maximum decrease in |E%D| is around 8 %), but the improvement is very small compared to the difference between computed and measured results. It should be pointed out that the massive separation mentioned above— near the stern on the bank side of the hull—may be influenced by the turbulence modeling. The prediction of this separation is crucial for the prediction of hydrodynamic forces. Another modeling error is the absence of the nonrotating propeller that was fitted to the hull in the measurements. In the previous assessment of the computed longitudinal force X0 the measured thrust was deducted. So, the influence of the propeller blades on the flow field was neglected. To look into this, a non-rotating propeller, fixed behind the hull was investigated. The study was carried out for the second water depth h/T = 1.35 and closest ship– X'%|Y'max| , Y'%|Y'max| (%) 120 100 80 60 40 20 0 -20 -40 -60 -80 -100 Canal A: h/T=1.35 -120 1.0 1.2 1.4 1.6 Y' (RANS_EASM) Y' (RANS_k-ω SST) Y' (EFD) bank distance yB = 1.180 in Canal A. Considering the improvement in the turbulence modeling above, the k–x SST model was adopted for these computations. The propeller was designed by the Maritime and Ocean Engineering Research Institute (MOERI) in Korea. Its data are given in Table 5 and the geometry is illustrated in Fig. 16. However, the angular position of the propeller blades in the experiment is unknown, so it is impossible to exactly capture the flow disturbance resulting from the blades in the experiment. Therefore, four designated positions were considered in the investigation. Taking the ship center-plane as a reference, the propeller reference line originally coincided with the ship center-plane (0), and then its blades were turned clockwise 30, 45 and 60 from this position (see Fig. 17). New computations with these blades were then performed. Changes in forces and moments due to the presence of the propeller are presented in Table 6. It is seen that the measured negative thrust of the fixed propeller in the Table 5 Propeller data Name MOERI KP458 Type Fixed pitch No. of propeller Single No. of blades 4 Diameter DR (m) 0.131 Pitch ratio PR/DR (0.7R) 0.721 Expanded area ratio AE/A0 0.431 Rotation Hub ratio Right hand 0.155 Skew () 21.15 Rake () 0.0 X' (RANS_EASM) X' (RANS_k-ω SST) X' (EFD) 1.8 yB 2.0 2.2 2.4 2.6 (a) X', Y' force (%) 70 K' (RANS_EASM) K' (RANS_k-ω SST) K' (EFD) N' (RANS_EASM) N' (RANS_k-ω SST) N' (EFD) K'%|K'max| , N'%|K'max| 60 50 40 30 20 10 0 -10 Canal A: h/T=1.35 -20 1.0 1.2 1.4 1.6 1.8 yB 2.0 2.2 2.4 2.6 (b) K', N' moment Fig. 15 X0 , Y0 force and K0 , N0 moment versus yB in Canal A 123 Fig. 16 Propeller geometry (ship side and back view) J Mar Sci Technol (2013) 18:310–323 321 Table 6 X0 , Y0 , K0 , N0 changes in experiment and computations (without and with a propeller) h/T = 1.35, yB = 1.180 Dprop Sw/o 14.49 – S0 S30 S45 S60 DX0 w/o ? prop. (%) (S - D) %D – 16.47 0.67 0.97 0.66 0.88 2.41 2.72 2.40 2.62 DY0 w/o ? prop. (%) Fig. 17 Variation of blade position (0 ? 30 ? 45 ? 60) – -2.49 -2.71 -2.64 -2.60 – – -2.88 -2.89 -3.12 -2.68 – – 27.82 34.83 33.22 26.30 DK0 w/o ? prop. (%) experiment was 14.49 % of the resistance. However, the resistance increases in the computations with different blade positions are all no more than 1 %. This could mean either that the flow separation at the stern is over-predicted in the computations, or that the interaction between the propeller and the hull causes a thrust on the hull, which is almost as large as the propeller drag. What speaks in favor of the latter explanation is the fact that X0 without the propeller is over-predicted by 16.47 %, compared with the data, if the measured negative propeller thrust is subtracted from the measured X0 , while the predicted X0 with the propeller is very close to the measured value without subtraction of the thrust. The error is then only 2–3 %. On the other hand, the errors in Y0 , K0 and N0 are much larger than this, as seen previously, so the first explanation is more likely: the separation is over-predicted at the stern. This causes the drag of the propeller to be much smaller than in the measurements. As seen in Table 6, the different blade positions cause very similar drag increases. The increase/decrease of X0 , Y0 and K0 are similar in magnitude, but the increase in N0 is much larger: about 10 times of the change in X0 , Y0 or K0 . Referring to Fig. 15b, the small value of N0 (close to zero) may explain the larger percentage increase. The last modeling error stated here is that the slip condition is satisfied at the walls (seabed, side bank) in computations, but when the hull moves over/along the seabed/side bank, a boundary layer is developed on these boundaries due to the disturbance velocity from the hull. Therefore, the slip condition might be inadequate, and a moving no-slip condition could be more suitable. Preliminary computations have indicated some effect, but this will be investigated further. In this investigation of modeling errors, several possibilities have been tested and most of them demonstrate an influence on hydrodynamic forces and moments. Although the magnitude of the influence—from turbulence modeling, neglect of free surface, non-free sinkage and trim, absence of propeller—varies, a combination of these contributions – DN0 w/o ? prop. (%) may yield more accurate solutions. Note that the influence on individual hydrodynamic quantities is not always uniform: improving the modeling does not always result in an improved result. Take for instance one of the conditions: h/ T = 1.35 and yB = 1.180 in Canal A. Applying more appropriate turbulence modeling (k–x SST model) makes the comparison error E for N0 drop 9 %, and based on this turbulence model, including a non-rotating propeller yields a further reduction of 4 %. However the error E of Y0 is reduced by 21 % with better turbulence modeling, but is then increased by 7 % including the non-rotating propeller. 5.2.4 Results in Canal B The numerical predictions of the ship–bank interaction in Canal A facilitated the computations for the same tanker moving in Canal B, since the experience with respect to the turbulence modeling, the inclusion of the effect of sinkage and trim, as well as the fixed propeller could be utilized. The computational settings in Canal B were similar to those in Canal A, as described in Sect. 5.1, and the computations were carried out for varying ship-to-bank distance (at h/T = 1.35). The k–x SST turbulence model was used and the non-rotating propeller included, but the initial sinkage and trim were not considered. As clearly shown in Fig. 14a and b, their influence on the forces and moments is negligible at the medium water depth (h/T = 1.35). The sinkage and trim results with varying bank distance in Canal B are shown in Fig. 18. As can be seen, a smaller ship–bank distance leads to larger sinkage and trim, indicating a pronounced blockage when the hull approaches the bank. Like in the results for Canal A, sinkage and trim are predicted well by the RANS method, the sinkage in particular, as shown in the figure. Trim values are slightly 123 322 J Mar Sci Technol (2013) 18:310–323 σ %|σmax| , τ %|τmax| (%) 150 125 100 75 50 25 0 -25 -50 -75 -100 -125 -150 0.6 σ (RANS_k-ω SST & prop.) σ (EFD) Canal B: h/T=1.35 τ (RANS_ k-ω SST & prop.) τ (EFD) 0.8 1.0 1.2 1.4 1.6 yB 1.8 2.0 2.2 2.4 included in computations, like here, the measured total X0 shall be used for evaluation. Figure 19 shows the forces X0 and Y0 for varying ship–bank distance, and the computed K0 , N0 results are available in Fig. 20. The correspondence between computed X0 results and measured data is good as are the trends in Y0 force and K0 , N0 moments. However the absolute accuracy of the latter three quantities is less satisfactory. A slight improvement relative to Canal A may be noted, probably due to improved modeling, but there are still significant differences between the measured and computed results. Note that Canal B should be a more difficult case to compute with the sloping wall. Fig. 18 Sinkage r and trim s versus yB in Canal B 6 Conclusions (%) 120 X' (RANS_ k-ω SST & prop.) X' (EFD) Y' (RANS_ k-ω SST & prop.) Y' (EFD) X'%|Y'max| , Y'%|Y'max| 100 80 60 40 20 0 -20 -40 -60 -80 0.6 Canal B: h/T=1.35 0.8 1.0 1.2 1.4 1.6 1.8 2.0 2.2 2.4 yB Fig. 19 X0 and Y0 force versus yB in Canal B K'%|K'max| , N'%|K'max| (%) 80 70 K' (RANS_ k-ω SST & prop.) K' (EFD) 60 N' (RANS_ k-ω SST & prop.) N' (EFD) 50 40 30 20 10 0 -10 -20 0.6 Canal B: h/T=1.35 0.8 1.0 1.2 1.4 1.6 yB 1.8 2.0 2.2 2.4 Fig. 20 K0 , N0 moment versus yB in Canal B under-predicted, which may be due to the over-predicted flow separation, typically at the most extreme condition (closest ship–bank distance). Results for forces and moments are given in Figs. 19 and 20. Again, the hydrodynamic variable of the primary interest is the longitudinal force X0 . As mentioned above, to evaluate the predicted X0 in the absence of a non-rotating propeller, the measured propeller force is deducted. When the propeller is 123 Investigating bank effects is a challenging task due to the importance and complexity of the hydrodynamic problem itself and the difficulty in modeling the physical problem by numerical tools. The present work aims at investigating the accuracy achievable in the prediction of several hydrodynamic forces and moments of interest in maneuvering. Great emphasis has been placed on uncertainty assessment and numerical and physical modeling issues. A grid convergence study was performed first to obtain the numerical uncertainty in the computations for varying grid densities. The study illustrated the difficulty in achieving converged results in bank-effects computations, but it also indicated a suitable grid density for the problem at hand. In a series of systematic computations the sinkage, trim and hydrodynamic forces and moments for varying water depths, ship-to-bank distances and bank geometries were then predicted. Very accurate results for sinkage and trim were demonstrated using a RANS method, while a potential flow method predicted trim much less accurately. For other quantities the RANS method predicted the trends with varying bank distance and bottom clearance quite well, but the absolute accuracy was less satisfactory. A formal validation analysis showed that there are modeling errors in the computations and/or the measurements. Five types of computational modeling errors, i.e., computational domain size, neglect of waves, non-free sinkage and trim, turbulence modeling, and absence of propeller were discussed. It was shown that the applied domain size is acceptable and that the waves at the low speed of interest have a negligible influence on the results, while the effect of sinkage and trim cannot be neglected at the shallowest water depth. Including the non-rotating propeller improved the predicted X0 force significantly, but the changes in other forces/moments were minor. As for the turbulence modeling, the k–x SST model produced slight improvement in comparison with the EASM model. J Mar Sci Technol (2013) 18:310–323 In further studies it would be of interest to investigate the effect of the no-slip condition on the bank walls and bottom. Also, measurements of the wake flow would be most valuable. Strong separation of the flow occurs in the most severe conditions close to the bank and bottom, and it is important to predict this flow accurately to obtain the correct forces and moments. Acknowledgments The present work was funded by Chalmers University of Technology, Sweden and the China Scholarship Council. Computing resources were provided by C3SE, Chalmers Centre for Computational Science and Engineering. The authors thank Mr. Guillaume Delefortrie (Flanders Hydraulics Research, Belgium) and Mr. Evert Lataire (Maritime Technology Division, Ghent University, Belgium) for providing the measurement data. References 1. (2009) International conference on ship maneuvering in shallow and confined water: bank effects. Antwerp, Belgium. http://www. bankeffects.ugent.be/index.html 2. Norrbin N (1974) Bank effects on a ship moving through a short dredged channel. In: 10th Symposium on naval hydrodynamics, Cambridge, MA, USA 3. Norrbin N (1985) Bank clearance and optimal section shape for ship canals. In: 26th PIANC international navigation congress, Brussels, Belgium, Section 1, Subject 1, pp 167–178 4. Li DQ, Leer-Andersen M, Ottosson P, Trägårdh P (2001) Experimental investigation of bank effects under extreme conditions. Practical design of ships and other floating structures. Elsevier Science Ltd, Oxford, pp 541–546 5. Ch’ng PW, Doctors LJ, Renilson MR (1993) A method of calculating the ship–bank interaction forces and moments in restricted water. Int Shipbuild Prog 40(421):7–23 6. Vantorre M, Delefortrie G et al (2003) Experimental investigation of ship–bank interaction forces. In: Proceedings of international conference on marine simulation and ship maneuverability, MARSIM’03, Kanazawa, Japan 7. Lataire E, Vantorre M, Eloot K (2009) Systematic model tests on ship–bank interaction effects. In: International conference on ship maneuvering in shallow and confined water: bank effects (2009), Antwerp, Belgium 8. Newman JN (1992) The green function for potential flow in a rectangular channel. J Eng Math (Anniversary Issue):51–59 9. Miao QM, Xia JZ, Chwang AT, et al (2003) Numerical study of bank effects on a ship travelling in a channel. In: Proceedings of 8th international conference on numerical ship hydrodynamics, Busan, Korea 10. Lee CK, Lee SG (2008) Investigation of ship maneuvering with hydrodynamic effects between ship and bank. J Mech Sci Technol 22(6):1230–1236 323 11. Lo DC, Su DT, Chen JM (2009) Application of computational fluid dynamics simulations to the analysis of bank effects in restricted waters. J Navig 62:477–491 12. Wang HM, Zou ZJ, Xie YH, Kong WL (2010) Numerical study of viscous hydrodynamic forces on a ship navigating near bank in shallow water. In: Proceedings of the twentieth (2010) international offshore and polar engineering conference, Beijing, China 13. Larsson L, Raven H (2010) Ship resistance and flow. Society of Naval Architects and Marine Engineers, New York. ISBN/ISSN: 978-0-939773-76-3 14. Broberg L, Regnström B, Östberg M (2007) SHIPFLOW theoretical manual. FLOWTECH International AB, Gothenburg 15. Deng GB, Queutey P, Visonneau M (2005) Three-dimensional flow computation with Reynolds stress and algebraic stress models. In: Rodi W, Mulas M (eds) Engineering turbulence modeling and experiments, vol 6. Elsevier, Amsterdam, pp 389–398 16. Menter FR (1993) Zonal two equation k–x turbulence models for aerodynamic flows. In: 24th Fluid dynamics conference, Orlando, AIAA paper, 93-2906 17. Roe PL (1981) Approximate Riemann solvers, parameter vectors, and difference schemes. J Comput Phys 43:357–372 18. Dick E, Linden J (1992) A multi-grid method for steady incompressible Navier–Stokes equations based on flux difference splitting. Int J Numer Methods Fluids 14:1311–1323 19. Hellsten A, Laine S (1997) Extension of the k–x-SST turbulence model for flows over rough surfaces. AIAA-97-3577, pp 252–260 20. (2010) A workshop on numerical ship hydrodynamics. Gothenburg, Sweden. http://www.gothenburg2010.org/kvlcc2_gc.html 21. Eça L, Vaz G, Hoekstra M (2010) Code verification, solution verification and validation in RANS solvers. In: Proceedings of ASME 29th international conference OMAE2010, Shanghai, China 22. Eça L, Vaz G, Hoekstra M (2010) A verification and validation exercise for the flow over a backward facing step. In: Pereira JCF, Sequeira A (eds) V European conference on computational fluid dynamics, ECCOMAS CFD 2010, Lisbon, Portugal 23. Zou L, Larsson L, Delefortrie G, Lataire E (2011) CFD prediction and validation of ship–bank interaction in a canal. In: 2nd International conference on ship manoeuvring in shallow and confined water, Trondheim, Norway 24. ASME V&V 20-2009 (2009) Standard for verification and validation in computational fluid dynamics and heat transfer. American Society of Mechanical Engineers, New York 25. Delefortrie G, Eloot K, Mostaert F (2011) SIMMAN 2012: execution of model tests with KCS and KVLCC2. Version 2_0, WL Rapporten, 846_01, Flanders Hydraulics Research, Antwerp, Belgium 26. Zou L, Larsson L (2010) CFD prediction of the local flow around the KVLCC2 tanker in fixed condition. In: Proceedings of a workshop on numerical ship hydrodynamics, Gothenburg, Sweden 123