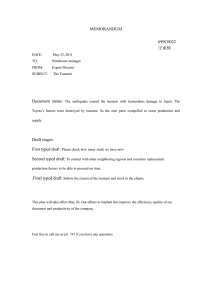
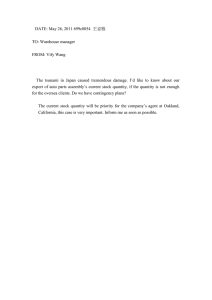
KEANDALAN SISTEM A Nama : Teofilus Dimas Prasetyo NRP : 04211840000073 RESUME Judul : Assessment Of The Reliability of The Indian Tsunami Buoy System Peneliti : R Venkatesan, N Vedachalam*, R Sundar, M Arul Muthiah, P Prasad and MA Atmanand National Institute Of Ocean Technology, Chennai, India Abstrak : Makalah ini menganalisis keandalan Indian Tsunami Buoy System(ITBS) dari sudut pandang kepentingan masyarakat. ITBS dikembangkan dan dipelihara oleh National Institute of Ocean Technology(NIOT) di Teluk Benggala dan Laut Arab. Sistem ini melibatkan pengukuran tekanan dasar laut dengan presisi tinggi, dalam komputasi situ dan perangkat telemetering akustik yang dipasang di dasar laut, yang mengirimkan perubahan anomali di kolom air ke pelampung permukaan yang ditambatkan. Latar belakang : Peristiwa tsunami 2004 di Asia Selatan (Wijetunge, 2009) mengakibatkan kerusakan besar pada kehidupan dan harta benda, dan karenanya, terjadi pertumbuhan pesat di minat dalam deteksi tsunami dan sistem peringatan. Karena tidak ada peringatan yang diterima sebelum peristiwa itu, lebih dari 240.000 nyawa hilang dari 11 negara di seberang Samudra Hindia (Groen et al., 2010). Bencana ini memotivasi Intergovernmental Oceanographic Commission(IOC) dari organisasi pendidikan, ilmiah dan budaya PBB untuk mengadakan dan membentuk Indian Early Tsunami Warning System (IETWS), seperti yang dibayangkan oleh IOC pada tahun 2025, tiga perempat populasi dunia akan tinggal di daerah pesisir (Groen et al., 2010) dengan kotakota besar yang terletak di pesisir. Hasil : Analisa Keandalan Analisis keandalan menggunakan metode fault three method, dilakukan untuk ITBS, dengan mempertimbangkan sistem jatuh tempo sejak didirikan pada tahun 2007. Kasus dasar melibatkan sistem yang dikembangkan dan dipasang di tahun 2007. Selama tahun-tahun berikutnya, berdasarkan pada efek mode kegagalan dan analisis kekritisan, dan kembalinya pengalaman teknis dan operasional dari lapangan, sistem itu terus menerus ditingkatkan dengan fokus utama pada keandalan. Dengan perbaikan yang digabungkan, sistem – yang beroperasi pada tahun 2014 - dianggap sebagai kasus yang matang. PoF dihitung selama satu tahun periode untuk kasus dasar dan dewasa. Analisis dilakukan, dengan sistem yang dikategorikan ke dalam subsistem termasuk BPR, MSB dan LES yang mengaktifkan NIOTMCC. Analisis keandalan yang dilakukan pada kasus dasar dan sistem yang matang menunjukkan bahwa MTBF dari simpul lepas pantai tunggal di Teluk Benggala yang berkomunikasi dengan NIOT-MCC telah meningkat dari 0,3 tahun pada tahun 2007 menjadi 0,9 tahun pada tahun 2013. Teridentifikasi bahwa, dengan ITBS yang sudah beroperasi dan matang, adalah mungkin untuk memiliki MTBF lebih dari 1,6 tahun dan 1,4 tahun dengan empat dan satu simpul lepas pantai masing-masing di Teluk Bengal dan Laut Arab. Namun, berdasarkan kebutuhan pengisian ulang baterai dan kebutuhan perawatan sensor, jadwal pemeliharaan ditetapkan sebagai satu tahun, yang dapat menyediakan ketersediaan lebih dari 98,5%. Berdasarkan analisis HSE berbasis IEC, diidentifikasi bahwa sistem ITBS harus memenuhi tingkat keandalan SIL 4 Komentar : Pada analisa keandalan indian tsunami buoy system ini hanya menggunakan satu metode analisa, yaitu metode fault three method. Menurut saya apabila peneliti tidak hanya menggunakan satu metode analisa tetapi beberapa metode analisa keandalan mungkin hasil dari analisa yang telah dilakukan akan akan lebih baik dan akurat lagi. See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/280736387 Assessment of the reliability of the Indian tsunami buoy system Data · August 2015 CITATIONS READS 0 215 7 authors, including: Ramasamy Venkatesan G. Latha National Institute of Ocean Technology Natioanl institute of ocean technology 182 PUBLICATIONS 2,748 CITATIONS 101 PUBLICATIONS 540 CITATIONS SEE PROFILE SEE PROFILE Simi Mathew Rokkam Rao National Institute of Ocean Technology Indian Institute of Tropical Meteorology 21 PUBLICATIONS 356 CITATIONS 55 PUBLICATIONS 1,928 CITATIONS SEE PROFILE Some of the authors of this publication are also working on these related projects: biofouling View project coastal ocean monitoring and prediction systems (COMAPS) View project All content following this page was uploaded by Ramasamy Venkatesan on 07 August 2015. The user has requested enhancement of the downloaded file. SEE PROFILE www.sut.org Assessment of the reliability of the Indian tsunami buoy system R Venkatesan, N Vedachalam*, R Sundar, M Arul Muthiah, P Prasad and MA Atmanand National Institute Of Ocean Technology, Chennai, India Technical Paper doi:10.3723/ut.32.255 Underwater Technology, Vol. 32, No. 4, pp. 255–270, 2015 Received 29 July 2014; Accepted 24 October 2014 Abstract The present paper analyses the reliability of the Indian tsunami buoy system (ITBS) from the point of view of societal importance. The ITBS was developed and maintained by the National Institute of Ocean Technology (NIOT) in the Bay of Bengal and Arabian Sea. The system involves high-precision ocean bottom pressure measurement, in situ computation and acoustic telemetering devices installed on the ocean floor, which transmit the anomalous change in the water column to the moored surface buoy. The surface buoy, in turn, relays data to the mission control centre shore station for predicting and advancing decisions in the event of a tsunami. The system has to be operational throughout the year and alert the Indian coastline in the event of a tsunami, and therefore the system should be trustworthy. Since its inception in 2007, the system has undergone many technological improvements with the main focus being on reliability. The health, safety and environment analysis indicates that, with one offshore node reporting its health every 10 hours to the mission control centre, the system could comply with the stringent Safety Integrity Level (SIL) 4. The result is found to comply with the actual system where reporting every hour is being implemented. The present study gives confidence on the ITBS’s reliable support to the Indian Early Tsunami Warning System. Keywords: buoy, health safety environment, mean time between failure, reliability, safety integrity level, tsunami IETWS INCOIS IOC ITBS LES MCC MSB MTBF MTTR NCAOR NIOT NIOT-MCC NOAA OMNI OOS PFD PMEL PoF PTI SIL TM UPS Indian Early Tsunami Warning System Indian National Centre for Ocean Information Services Intergovernmental Oceanographic Commission Indian tsunami buoy system land earth station Mission Control Centre moored surface buoy mean time between failure mean time to repair National Centre for Antarctic and Ocean Research National Institute of Ocean Technology National Institute of Ocean Technology, Mission Control Centre National Oceanic and Atmospheric Administration Ocean Moored buoy Network for Northern Indian Ocean Ocean Observation Systems probability of failure on demand Pacific Meteorological Environmental Laboratory probability of failure proof test interval Safety Integrity Level technical maturation uninterrupted power supply Acronym list ADDRESS BPR DART FIT FRACAS HSE advanced data reception and analysis system bottom pressure recorder Deep Ocean Assessment and Reporting of Tsunamis failure-in-time Failure Reporting, Analysis, and Corrective Action System Health, Safety and Environment * Contact author. Email address: veda1973@gmail.com 1. Introduction The 2004 tsunami event in South Asia (Wijetunge, 2009) resulted in vast destruction to life and property, and hence, there has been a rapid growth in the interest in tsunami detection and warning systems. As no warning was received prior to the devastating event, more than 240,000 lives were lost from 11 nations across the Indian Ocean (Groen et al., 2010). 255 Venkatesan et al. Assessment of the reliability of the Indian tsunami buoy system This disaster motivated the Intergovernmental Oceanographic Commission (IOC) of the UN educational, scientific and cultural organisation to convene and establish the Indian Early Tsunami Warning System (IETWS), as the IOC envisages that by the year 2025, three-quarters of the world’s population will be living in coastal areas (Groen et al., 2010) with major cities located within the coastal line. The tsunami forecast by the IETWS involves the combined analysis of seismic signatures, water level changes in the deep ocean and near-shore tidal observations (Venkatesan et al., 2013). Real-time data are specifically for detecting and reporting the water column changes in deep sea locations, so as to allow the forecasting centres to generate lifesaving early warnings of tsunamis (Fine et al., 2005; Brown, 1983; Gasiewski et al., 2005). The Ministry of Earth Sciences, Government of India, has taken up the project on the development and deployment of the Indian tsunami buoy system (ITBS) in Indian waters. The real-time data are received at the National Institute of Ocean Technology, Mission Control Centre (NIOT-MCC) in Chennai, and the Tsunami Warning Centre located in the Indian National Centre for Ocean Information Services (INCOIS) in Hyderabad, India, for data modelling and public notification in the event of a tsunami (Arul Muthiah et al., 2010; Srinivasa Kumar et al., 2012). The decision support system at INCOIS is supported by real-time modelling software, which receives data from the described ITBS, real-time seismic monitoring network with 17 nodes and tide gauge network at 36 locations (INCOIS, 2011). The IETWS is vital for the well-being of the coastal population, where the accuracy of data and its timely receipt and proper interpretation can have life-ordeath consequences. In addition, false alarms lead to huge unrest, unwarranted evacuation exercises and expenses. Moreover too many false alarms would weaken the faith in the system. Thus, the reliability of the ITBS is a key factor, as the failure of the system to detect and report a likely event cannot be tolerated. Therefore, the failure rate of the system has to be as low as reasonably possible and with the highest level of availability. Reliability modelling is done for the operating ITBS, with the failure data based on the National Institute of Ocean Technology (NOIT) experiences and relevant standards so as to identify the mean time between failure (MTBF) and identify the minimum required offshore nodes to ensure the maximum system availability. In order to ensure that the probability of failure of the system on-demand is minimal and meets the required Safety Integrity Levels (SILs), the frequency of the proof test inter256 vals are analysed, based on the IEC 61508 Health, Safety and Environment (HSE) demands. This analysis helps in identifying and improving the subsystems which have significant failure probabilities. 2. Importance of ocean observation programme for India A tsunami is an ever-present threat to lives in the 7,500km-long Indian coastline, where 30% of the national population resides. In the Indian Ocean, there are two tsunamigenic zones: the AndamanSumatra trench and the Makran coast. The 2004 Indian Ocean tsunami was one of the most ruining disasters in modern history, and the second largest earthquake ever recorded on a seismograph (Arul Muthiah et al., 2010; Wijetunge, 2009). The Ocean Observation Systems (OOS) programme, the former National Data Buoy Program of NIOT, was established in 1996 with the prime objective to operate, maintain and develop moored buoy observational networks and related telecommunication networks in the Indian waters. The OOS has inherited the lead responsibility for a number of important and well-established observational programmes. The NIOT-MCC manned centre receives data non-stop from moored buoys located in the Indian Ocean (Kesava Kumar et al., 2013). The Indian moored buoy system comprises three families: • Meteorological ocean buoys for measuring and telemetering the meteorological and sea surface parameters; • Ocean Moored buoy Network for Northern Indian Ocean (OMNI) for measuring and telemetering the meteorological, surface and subsurface parameters; and • ITBS for the detection and reporting of the water level for tsunami warning. As part of the IETWS established by the Indian government at the INCOIS in Hyderabad in 2007, tsunami buoy networks to detect tsunamis were installed and operated by NIOT, and the same is shown in Fig 1. In addition, the INCOIS maintains two tsunami buoys supplied by the SAIC in the US, which is not discussed here. The main objective is to collect and disseminate water column changes, using bottom pressure recorders (BPR) deployed at selected locations in the Bay of Bengal and Arabian Sea. Based on the mandate of the government, NIOT uses Inmarsat satellite telemetry systems since 1997, for real-time data transmission and two-way communications in all moored buoy systems. Since the first meteorological ocean buoy was deployed off Chennai, nearly 550 moored buoy systems have been deployed Underwater Technology Vol. 32, No. 4, 2015 Fig 1: ITBS network in the Indian Ocean for collecting various meteorological, surface and subsurface parameters, and tsunami water level data, ranging from coastal waters to deep oceans. The range of coverage of the deployment of these buoys is 63°E to 93°E and 6°N to 20°N. The buoy systems were used to record extreme weather conditions, such as 17 cyclones from 1997 to 2012, collecting nearly 4.4 million datasets over 15 years. From 1997 onwards, the NIOT-MCC has aggregated more than 2.5GB of ocean datasets. The ITBS data are being well accepted by IOC on a reliable basis and exchanged with other countries for ensuring coordinated effort during a tsunami event and for future analysis. On 12 June 2010, when an undersea earthquake occurred, the ITBS deployed TB04 in the Bay of Bengal and captured the seismic signal, which originated from 7.848° N to 91.919° E. It then switched to the tsunami mode and transmitted the captured data to the shore centres, and the data were analysed (Arul Muthiah et al., 2010) for a possible tsunami. The operational tsunami monitoring nodes in the Indian waters are shown in Table 1. 3. Indian tsunami buoy system for early tsunami warning The concept involved in the tsunami detection and reporting system developed by the NIOT shown in Fig 2, is similar to the robust and proven Deep Ocean Assessment and Reporting of Tsunamis (DART) developed by the US National Oceanic and Atmospheric Administration (NOAA), Pacific Meteorological Environmental Laboratory (PMEL) (Meinig et al., 2005), and is operational in the Pacific, Atlantic and Caribbean waters. A tsunami wave in deep water creates a small but measurable change in pressure that will persist for a period of 20mins (Ramadass et al., 2014). By monitoring and analysing any such changes, subsea detectors can be used to trigger an alarm that sends a warning message to a moored buoy-mounted receiver on the sea surface. The buoy, in turn, relays the message via a satellite datalink to a control centre that can issue a warning to vulnerable communities. An offshore node involves a system using a BPR, deployed in the locations indicated in Table 1 in deep Table 1: Tsunami monitoring offshore nodes in the Indian Ocean Buoy ID World Meteorological Organization ID Latitude (N) Longitude (E) Depth (m) ITB03 ITB05 ITB06 ITB09 ITB12 23217 23219 23220 23223 23226 06° 20’54” 10° 59’ 49” 14° 44’06” 17° 28’ 57” 20° 20’ 47” 88° 35’ 36” 89° 28’ 55” 89° 33’ 48” 89° 46’ 57” 67° 32’ 11” 3,966 3,220 2,725 2,284 3,050 257 Venkatesan et al. Assessment of the reliability of the Indian tsunami buoy system SATELLITE SHORE STATION WATER LEVEL SURFACE BUOY SUBSURFACE FLOAT ACOUSTIC LINE BPR SENSOR MOORING 4,000m (app) SURFACE ACOUSTIC MODEM SEABED Fig 2: Concept of ITBS developed by NIOT waters, and the locations are based on the fault line and the shoreline to be protected (Ramadass et al., 2014). The BPR is accompanied by an integral pressure averaging subsystem and a deep ocean pressure recorder unit (Sundar et al., 2013). The pressure sensor in the BPR uses a very thin quartz crystal beam, electrically induced to vibrate at its lowest resonant mode and having a measurement sensitivity better than 2 × 10–7, which can measure a water column change of <1mm in a 6,000m water column (Srinivasa Kumar et al., 2012; Yilmaz et al., 2004). A co-located electronic processor acquires the signals from the pressure sensor continuously, and the in-built algorithm continuously analyses the water column pressure changes and indicates the possibilities of a tsunami event (Arul Muthiah et al., 2010). The power required for the subsea data processing, using an electronic data processing system and acoustic modem, is supplied by the BPR located primary lithium thionyl batteries of 2000Ah capacity, which are designed to work for 1.5 years (Kesava Kumar et al., 2013) in normal operating conditions. The subsea equipment and the buoyancy package are mounted on a frame that is moored with an anchor weight and an acoustic release, making it possible to retrieve by sending a release command to the acoustic modem. The software in the BPR processes the acquired pressure data based on the predictive Newton Forward Extrapolation algorithm, developed by the NOAA (Meinig et al., 2005; Ramadass et al., 2014). The BPR telemeters the data acoustically with time-stamped pressure readings and system status parameters. The transceiver in the moored surface buoy (MSB) receives the acoustically transmitted data from the BPR. 258 The MSB transceiver is capable of two-way communication to request status information from the BPR and to change the settings in the same. The features include BPR wake-up, change detection parameters, forcing and cancelling an event, request battery status, starting and stopping of data logging, and the mechanism to trigger the acoustic release of the BPR. The MSB transmits the data to the Inmarsat satellite terminal, which, in turn, transmits it to the NIOT-MCC and INCOIS data analysis centre, through the land earth station (LES) and public network systems. The application software operating in the Mission Control Centre (MCC) decodes and disseminates the data for display (Sundar et al., 2013). The daily power requirement of the MSB is about 8AH met with secondary and primary batteries with a peak current of 2.6A, which is consumed by the satellite transceiver for a few seconds during data transmission. The 100AH capacity lead-acid battery in the MSB is charged using a set of four solar panels, each of 12V, 20W capacities. Considering the overall cost involved in the maintenance of buoys located in remote sites far away from the shore, the secondary batteries are backed by 3,000AH capacity lithium thionyl chloride primary batteries. The Li batteries are characterised by low self-discharge, high energy density (FIDES, 2010), wide operating temperatures, high pulse current handling capacity and a stable voltage profile throughout the discharge period (Venkatesan et al., 2013; Meldrum, 2009), which are significant advantages for the MSB requirements. The 24hr manned NIOTMCC is powered by the electricity mains, backed by two 125kVA generator sets in the automatic mains failure mode, and further backed by three redundant uninterrupted power supply systems. The probability of failure (PoF) of power to the MCC without and with uninterrupted power supply (UPS) is computed to be 20% and 1%, respectively, in a one-year period. Fig 3 shows the dashboard of the advanced data reception and analysis system (ADDRESS) displayed in the MCC. As shown in Fig 1 earlier, tsunami buoys are placed at strategic locations in the Arabian Sea and Bay of Bengal to provide early warnings. Strategic sections of locations close to the Andaman-Sumatra subduction fault in the Bay of Bengal and Makran fault in the Arabian Sea for deployment of tsunami buoys are determined by the careful consideration of many factors (Srinivasa Kumar et al., 2012). Importantly, the tsunami buoy has to be installed far away from any potential earthquake epicentre, to ensure that there is no interference between the earthquake signal at the buoy and the sea-level signal from the tsunami. On the other hand, the tsunami buoy needs Underwater Technology Vol. 32, No. 4, 2015 Fig 3: View of the ADDRESS screen in NIOT-MCC (reproduced with permission from NIOT) to be close enough to the epicentre to enable timely detection of any tsunami, so as to maximise the lead time of tsunami forecasts for the coastal areas. Seven locations, i.e. five in the Bay of Bengal and two in the Arabian Sea, are selected by India, considering all these factors and the international maritime boundaries. Fig 4 shows one of the offshore nodes in operation. For an effective IETWS, time is of essence. Braddock and Carmody (2001) specify the time constraint for the system as: T1 + T2 + T3 ≤ T4 (1) where T1 is the detection time, T2 is the assessment time, T3 is the evacuation time, and T4 is the tsunami travel time. Detection time can be reduced by optimising the locations of seismic stations, tsunami nodes and tide gauges, by implementing global real-time data telemetry for the monitoring system (Holgate, 2007), and by improving data processing and model algorithms. Shortening the assessment time requires improvements in the ability to measure the true size and seismic energy of very large earthquakes so as to understand factors contributing to tsunami generation and to make warning decisions using limited historical data samples. The evacuation time T3 of a community is affected by its emergency planning, education, communication network, and other socio-economic, environmental and circumstantial factors. The ITBS detecting and reporting system is designed in such a way that T1 will be as low as reasonably possible. The reliability analysis of the ITBS is done with a four node configuration in the Bay of Bengal and one node in the Arabian Sea. 4. Reliability estimation methodology for the Indian tsunami buoy system The following are the major standards adopted for computing the failure-in-time (FIT) data for the system components: Fig 4: View of the offshore node in operation • FIDES Guide for the estimation of reliability for electronic components and systems considering mission and environment specific analysis (FIDES, 2010); • MIL HDBK 217F, Military handbook for reliability estimation of electronics equipment (US Department of Defense, 1991); 259 Venkatesan et al. Assessment of the reliability of the Indian tsunami buoy system • OREDA Handbook for Offshore Reliability Data (SINTEF, 2009); • IEEE 493 IEEE Recommended practice for the design of reliable industrial and commercial power systems (Institute of Electrical and Electronics Engineers, 1997). The sources of data for computing the FIT data for the system components include: • NIOT OOS Failure Reporting, Analysis, and Corrective Action System (FRACAS) database; • The manufacturer’s data and interpretation suitable for the mission profile; • Schematics for systems and circuit boards, where available, using component failure data from the respective standards, failure rates taking the mission profile, operating conditions and stresses into consideration. The fault tree analysis and SIL modules of TOTALSATODEV GRIF tool are used for computing the probability of failure and SILs. 4.1. Reliability estimation The reliability analysis, using the fault tree method, is done for the ITBS, taking into consideration the system maturity since its inception in 2007. The base case involves the system developed and installed in the year 2007. Over the subsequent years, based on the failure mode effect and criticality analysis, and the returns of technical and operational experiences from the field, the system was continuously improved with the main focus on reliability. With the improvements incorporated, the system – which was operational in the year 2014 – is considered as a mature case. PoF is computed for a one-year period for both the base and mature cases. An analysis is performed, with systems being categorised into subsystems including BPR, MSB and LES activated NIOT-MCC. 4.2. Failure-in-time data for subsystems and components Table 2 details the calculated FIT data of the system and components in failures per billion hours, and Table 2: Tsunami buoy location data Subsystem/component Bottom pressure recorder Communication circuit board Communication software Acoustic receiver Internal electronics Data acquisition board Pressure sensor Buoyancy/flotation material Moored surface buoy Mast/sensor arm installed in Bay of Bengal Mooring Acoustic modem Lead acid battery, 12V, 100AH Data acquisition board hardware Data acquisition board software Power regulation board Data processor board NIOT-Mission Control Centre Electricity mains failure Generator sets Automatic mains failure panel Low voltage circuit breaker Power transformer Primary data link between LES and NIOT-MCC Secondary data link between LES and NIOT-MCC Server processor Server software 40kVA UPS 20kVA UPS OTHERS – General DC-DC converter Fuse Communication cables and connectors Power cables and connectors FIT* Source of data 2000 300 20 2700 500 60 1920 COTS-FIDES COTS-FIDES OREDA COTS-FIDES COTS-FIDES OREDA OREDA 28500 22800 147 3140 3000 28500 86 59 FRACAS-NIOT FRACAS-NIOT OREDA US Dept. of Energy COTS-FIDES FRACAS-NIOT COTS-FIDES COTS-FIDES 4166667 12000 300 300 673 1260000 220000 0.6 22800 114000 114000 FRACAS-NIOT FRACAS-NIOT FRACAS-NIOT IEEE IEEE FRACAS-NIOT FRACAS-NIOT FRACAS-NIOT FRACAS-NIOT FRACAS-NIOT FRACAS-NIOT 7 10 25 100 COTS-FIDES COTS-FIDES OREDA OREDA * FIT in billion hours = (number of failures/number of units × operating hours) × 109 260 Underwater Technology Vol. 32, No. 4, 2015 The MTBF of the base case ITBS is 0.31 years and it requires frequent maintenance, which is costly in terms of the ship time and other logistics involved. Based on the FRACAS data and FMECA studies, the system is matured with technical improvements over the years with reliability as the key driver. The technical maturations (TM) and their effect on the ITBS MTBF are detailed in the following sections. is used for the computations in the base case. The FIT for the components, based on OOS field return of experiences, is computed using the number of failure events recorded in the OOS-maintained FRACAS database, and the number of units in operation during the considered period. 4.3. Base case The PoF for the base case system involving a single node in operation in the Bay of Bengal, computed for a one-year period, is shown in Fig 5. Based on the physical and functional topologies, failure trees are determined, with the systems categorised in BPR, MSB and MCC locations. It can be seen that the failure contributions of BPR, MSB and MCC are 5.2%, 63.8% and 88.2%, respectively, and results in the PoF of 95.95%, which corresponds to an MTBF of 0.31 years. The contributions of the subsystems are shown in Figs 6 to 8 in chronological order. From Fig 6, it can be identified that the failure contribution of the solar panel and the mast antenna are significant in MSB, each contributing to 22.12% of the overall data transmission failure of 39.61%. Fig 7 shows the portion of the failure tree for the communication failure between the MSB and the satellite terminal, where the contribution of the firmware failure is 22.09% in the overall communication failure of 24.49%. Fig 8 shows the portion of the failure trees for the tsunami data receipt failure at NIOT-MCC, where the contributions of the primary and secondary datalink failure between LES and NIOT were found to be significant with 85.5% failure probability. 4.3.1. TM1: Replacement of reliable energy storage in moored surface buoy Based on the fault tree analysis shown in Fig 6 and the NIOT FRACAS data, the failure of the solar panel charging system and the mast antenna were mainly caused by the act of external elements prevailing in the deployed location. Damage to the solar panels lead to charging failure of the lead acid battery, and damage to the Inmarsat mast antenna results in the loss of communication between the offshore node and the MCC. A solution to the operational challenge is found by incorporating a reliable lithium thionyl chloride based primary battery pack (Linden and Reddy, 2002) of 2,176AH capacity in the MSB. The battery pack comprises eight parallel modules, each of 272AH capacities. With the buoy consumption of around 5AH per day, the battery pack can cater to the energy requirements of the MSB for a one-year period. The status of the battery packs is intimated to the MCC for management decisions. Based on the NIOT experiences, the mean time to repair (MTTR) will be a maximum of seven days, which involves the ship mobilisation time, travel to Tsunami warning system failure Or25 U(8760h)=0.9595 mission-time=8.76E3 Mission Control Centre (MCC) failure BPR system failure Surface buoy system failure Or24 U(8760h)=0.882 mission-time=8.76E3 Or15 U(8760h)=5.254E-2 mission-time=8.76E3 Or22 U(8760h)=0.6383 mission-time=8.76E3 MCC server failure SBS communication (DAS) failure Data transmssion to IMMARSAT failure Or18 U(8760h)=0.2449 mission-time=8.76E3 Or21 U(8760h)=0.3961 mission-time=8.76E3 Or1 U(8760h)=6.8008E-3 mission-time=8.76E3 SBS commn Data Control and communication of BPR failure Positioning of surface buoy failure Or20 U(8760h)=0.2084 mission-time=8.76E3 Positioning Data failure from acoustic receiver MCC server power input failure BPR processor failure to acquire data MCC server MCC power Data failure from NIOT server station BPR mechanical hardware failure Or16 U(8760h)=2.4315E-2 mission-time=8.76E3 Control Or17 U(8760h)=8.7562E-4 mission-time=8.76E3 Or10 U(8760h)=4.8471E-3 mission-time=8.76E3 BPR processor Or14 U(8760h)=2.287E-2 mission-time=8.76E3 Or23 U(8760h)=0.1813 mission-time=8.76E3 Or38 U(8760h)=0.8552 mission-time=8.76E3 Data from server BPR Data from acoustic receiver Fig 5: Tsunami warning failure for ITBS in Bay of Bengal 261 Venkatesan et al. Assessment of the reliability of the Indian tsunami buoy system Data transmssion to Inmarsat failure Or21 U(8760h)=0.3961 mission-time=8.76E3 DAS to modem cable failure Antenna mast/sensor arm failure Power failure Or35 U(8760h)=0.2234 mission-time=8.76E3 49 47 Evt49 exponential uwcommncables U(8760h)=2.1898E-4 mission-time=8.76E3 Evt47 exponential mast U(8760h)=0.2212 mission-time=8.76E3 Battery failure Solar panel failure And34 U(8760h)=2.8651E-3 mission-time=8.76E3 Satellite telemetry modem failure 74 48 Evt74 exponential mast U(8760h)=0.2212 mission-time=8.76E3 Battery pack – 1 failure Or32 U(8760h)=5.3527E-2 mission-time=8.76E3 Evt48 exponential Sat Terminal U(8760h)=1.2869E-3 mission-time=8.76E3 Battery pack – 2 failure Or33 U(8760h)=5.3527E-2 mission-time=8.76E3 Battery Battery pod failure Battery pod failure 71 70 Evt71 exponential SBSbatterypod U(8760h)=2.7132E-2 mission-time=8.76E3 Evt70 exponential SBSbatterypod U(8760h)=2.7132E-2 mission-time=8.76E3 Fig 6: Data transmission to Inmarsat failure from the moored surface buoy SBS communication (DAS) failure Or18 U(8760h)=0.2449 mission-time=8.76E3 Surface buoy power board failure Surface buoy data acquisition board failure 37 35 Evt37 exponential SBSpowerboard U(8760h)=7.5308E-4 mission-time=8.76E3 Evt35 exponential SBSdataboard U(8760h)=2.5938E-2 mission-time=8.76E3 Battery failure And34 U(8760h)=2.8651E-3 mission-time=8.76E3 data Surface buoy data processing board failure Interface cable from battery to DAS failure MSB software failure 36 69 75 Evt36 exponential SBSprocessorboard U(8760h)=5.1671E-4 mission-time=8.76E3 Evt69 exponential uwpowercables U(8760h)=8.7562E-4 mission-time=8.76E3 Evt75 exponential SBSsw U(8760h)=0.2209 mission-time=8.76E3 Fig 7: Data acquisition system failure in moored surface buoy 262 Underwater Technology Vol. 32, No. 4, 2015 Data failure from NIOT server station Or38 U(8760h)=0.8552 mission-time=8.76E3 NIOT mail server functional failure Power failure to NIOT mail server And36 U(8760h)=0.8544 mission-time=8.76E3 Or37 U(8760h)=5.351E-3 mission-time=8.76E3 Primary fibre data link to server failure Secondary fibre link to server failure Lacalised MCB at mail server room 76 77 78 Evt76 exponential Pylink U(8760h)=1 mission-time=8.76E3 Evt77 exponential SyLink U(8760h)=0.8544 mission-time=8.76E3 Evt78 exponential LVCircuitbreaker U(8760h)=2.6245E-3 mission-time=8.76E3 Power dispatch from EB section failure Or6 U(8760h)=2.7336E-3 mission-time=8.76E3 MCC power Fig 8: Data reception failure at NIOT-MCC the site, recovery, repair and reinstallation. During this period, the energy requirement could be around 35AH. When the fault is reported on the 358th day after deployment, 386AH of energy (approximately 17%) could reside in the battery bank, in which each module has 48AH. This energy could be met with one module in the battery pack. Fig 9 shows the PoF when the Li battery bank is incorporated along with the lead acid powered system. The gate N40 in Fig 9 indicates that the failure of the eighth module in the Li battery pack results in a complete power failure in the MSB. By means of this modification, the PoF of operating power in the MSB is reduced from 22.4% to nearly zero, with the ITBS MTBF increased from 0.31 to 0.34 years. 4.3.2. TM2: Moored surface buoy firmware improvement Fig 7 shows the portion of the failure trees, where the failure of data communication is between the MSB and the satellite terminal, with significant contribution owing to the firmware failure in the MSB processor. The failure of communications results in direct intervention through maintenance, which is exorbitant. The failure is reduced by incorporating a three-level software-based watchdog timer. This feature enables the MSB processor system to reboot during the processor’s prolonged hang-ups for more than 10mins continuously, with a pre-programmed periodicity of 10min, 3hr and 10 days. The two-way communication feature is further enhanced by including a forced restart facility from the MCC. Further, the processor is enhanced by customisation by means of which the hardware FIT is reduced by a factor of 10%. Through this modification, the PoF of data transfer and communication failure between the MSB and MCC is reduced from 24.49% to 2.8% in a one-year period, with the ITBS MTBF increased from 0.34 to 0.37 years. The improvements are represented in Fig 10. 4.3.3. TM3: Network redundancy Fig 8 shows the portion of the failure trees for the tsunami data receipt at the NIOT-MCC. The communication was based on the modem-to-modem principle that resulted in long queuing of data in the sending modem, which increased the latency time and delayed the valuable decision-making process and time during a likely tsunami event. The solution to this failure scenario is found by means of email communication, wherein the data from the modem is routed to both the NIOT and INCOIS mail servers through the public networking system. This is to ensure redundancy in the receipt of data in the NIOT-MCC and INCOIS centre. In case of any failure from the public cabled network link failure at INCOIS, the data from the NIOT-MCC will be fetched by the INCOIS centre, through peer-topeer very small aperture terminal communication. Based on the improvement, the PoF of data transfer and communication failure is reduced to 44.03%, with the ITBS MTBF increased from 0.37 to 0.87 years, and the same is shown in Fig 11. Further improvements, such as utilising FTP to reduce the 263 Venkatesan et al. Assessment of the reliability of the Indian tsunami buoy system Power source failure in MCB And39 U(8760h)=1.6187E-13 mission-time=8.76E3 Power failure owing to lead acid batteries and solar panel Lithium battery bank failure Or35 U(8760h)=0.224 mission-time=8.76E3 KOutOfN40 8/8 U(8760h)=7.2268E-13 mission-time=8.76E3 8 Power Lithium thionyl chloride batteries failure Lithium thionyl chloride batteries failure Lithium thionyl chloride batteries failure Lithium thionyl chloride batteries failure 80 81 84 85 Evt80 exponential LiBattery U(8760h)=3.0365E-2 mission-time=8.76E3 Evt81 exponential LiBattery U(8760h)=3.0365E-2 mission-time=8.76E3 Evt84 exponential LiBattery U(8760h)=3.0365E-2 mission-time=8.76E3 Evt85 exponential LiBattery U(8760h)=3.0365E-2 mission-time=8.76E3 Lithium thionyl chloride batteries failure Lithium thionyl chloride batteries failure Lithium thionyl chloride batteries failure Lithium thionyl chloride batteries failure 82 83 86 87 Evt82 exponential LiBattery U(8760h)=3.0365E-2 mission-time=8.76E3 Evt83 exponential LiBattery U(8760h)=3.0365E-2 mission-time=8.76E3 Evt86 exponential LiBattery U(8760h)=3.0365E-2 mission-time=8.76E3 Evt87 exponential LiBattery U(8760h)=3.0365E-2 mission-time=8.76E3 Fig 9: Power system failure reduction by incorporating lithium thionyl battery storage dependency on public networks and mail server and using redundant satellite and LES communications, are under investigation. 4.3.4. TM4: Buoy position watch In order to have a better acoustic communication, the BPR is deployed within 300m of the MSB. Failure of the MSB mooring results in the loss of MSB at the location and renders the node unavailable during an event. One of the classic cases was the event reported on 12 April 2012 (Srinivasa Kumar et al., 2012): the MSB of the node in location 7 N/87 E got separated from the mooring owing to the act of unknown elements and was identified during routine maintenance on 5 December 2012. The retrieved BPR was found to have recorded an event that occurred on 12 April 2012, but was not reported to the MCC because the MSB was not in place. Such a situation renders the specific node unavailable for the system. To overcome the impact 264 of such an undesirable situation, a buoy position watch system is implemented. This system transmits the buoy position to the NIOT-MCC every hour. Fig 7 shows the fault trees, indicating the PoF of the MSB owing to mooring failure to be 26.84%. With the modification implemented, in the case when a mooring failure is reported, action will be taken to track the parted buoy, retrieving it for servicing and reinstallation, based on the ship availability. Mooring failures’ data are being analysed and further improvements are underway. Fig 12 shows the buoy position information continuously logged in the NIOT-MCC. 4.3.5. Consolidated results of technical maturity Table 3 summarises the improvements in the ITBS from the base case to the matured case. By means of these technical improvements, the PoF of a single node reduces from 95.95% to 68.3% in a one-year period, and hence, the MTBF increases from 0.32 to 0.87 years for the systems installed in the Bay of Underwater Technology Vol. 32, No. 4, 2015 SBS communication (DAS) failure Or18 U(8760h)=2.8026E-2 mission-time=8.76E3 Surface buoy data acquisition board failure Surface buoy data acquisition board failure Surface buoy power board failure 35 36 37 Evt35 exponential SBSdataboard U(8760h)=2.5938E-2 mission-time=8.76E3 Evt36 exponential SBSprocessorboard U(8760h)=5.1671E-4 mission-time=8.76E3 Interface cable from battery to DAS failure Power source failure in MSB Evt37 exponential SBSpowerboard U(8760h)=7.5308E-4 mission-time=8.76E3 MSB software failure And39 69 U(8760h)=1.6187E-13 mission-time=8.76E3 Evt69 Power exponential uwpoercables U(8760h)=8.7562E-4 mission-time=8.76E3 75 Evt75 exponential 2.85E-15 U(8760h)=2.4966E-11 mission-time=8.76E3 Fig 10: MSB data acquisition software failure reduction with firmware improvements Mission Control Centre (MCC) failure And77 U(8760h)=0.4403 mission-time=8.76E3 Mission Control Centre at INCOIS failure Mission Control Centre at NIOT failure Or24 U(8760h)=0.8819 mission-time=8.76E3 MCC server failure MCC power input failure Or10 U(8760h)=4.8471E-3 mission-time=8.76E3 MCC power Or62 U(8760h)=0.4993 mission-time=8.76E3 MCC power input failure Or23 U(8760h)=0.1813 mission-time=8.76E3 MCC server MCC server failure MCC server MCC power Data failure from NIOT server station Or38 U(8760h)=0.8551 mission-time=8.76E3 Data Or61 U(8760h)=0.1813 mission-time=8.76E3 Or48 U(8760h)=4.8471E-3 mission-time=8.76E3 Data failure from INCOIS server station Or76 U(8760h)=0.3858 mission-time=8.76E3 Data Fig 11: Improvements in MSB-MCC data reception performance 265 Venkatesan et al. Assessment of the reliability of the Indian tsunami buoy system Fig 12: Buoy positions watch system to monitor possible mooring failures (reproduced with permission from NIOT) Table 3: Summary of improvements from the base to the matured case L1 L2 L3 L4 L5 Data reception in INCOIS BPR system Moored surface buoy Data transmission to Inmarsat Power failure Sensor arm/ antenna mast Surface buoy DAS data failure MSB data acquisition and processing boards MSB processor software Positioning of surface buoy Data from acoustic receiver Tsunami warning signal reception Reception input data Reception server data failure Primary link Secondary link Reception power failure Reception server 266 PoF (%) in base case PoF (%) in matured case 95.95 68.3 5.25 63.83 5.25 40.22 39.61 22.24 22.34 22.12 Negligible 22.12 24.49 2.8 2.72 2.72 22.09 Negligible 20.84 20.84 0.08 0.08 88.2 44.03 85.52 44.03 85.44 49.93 99.9 85.4 0.05 61.85 61.85 Negligible 18.13 18.13 Underwater Technology Vol. 32, No. 4, 2015 Bengal location. A similar analysis is done for the system installed in the Arabian Sea, with the respective field failure data recorded in FRACAS, and the MTBF has increased to 1.43 years over the period from 2008 to 2013. 5. Availability and maintainability The availability of the system is a critical aspect, as the system has to be available to detect and report an event during the entire operating period. Efforts have been taken by NOAA to maintain the availability of the DART network at the highest possible level (Meinig et al., 2005) since its inception in 2006, and the return of experiences is taken into account in realising the ITBS. The ITBS with one offshore node is thus identified to have an MTBF of 0.87 years. Increased number of nodes could increase the availability of the system, while in demand. Availability in % = MTBF / MTBF + MTTR (2) When a failure is reported from a single offshore node and with the mean time to repair (MTTR) of seven days, the availability of the system with the MTBF of 0.87 years is computed to be 97.84%. With Table 4: Influence of more offshore nodes in ITBS Configuration Bay of Bengal 1 node 2 node 3 node 4 node Arabian Sea 1 node PoF MTBF Availability* 68.3% 54.55% 48.59% 46.01% 0.87 1.27 1.50 1.62 97.84% 98.51% 98.74% 98.83% 50.28% 1.43 98.68% *Availability in % = MTBF / MTBF + MTTR, MTBF and MTTR in hours, MTTR taken as 7 days the objective of having a higher MTBF and availability, so as to have a reduced maintenance interval, the ITBS with more number of offshore nodes is analysed. Table 4 shows the results of the analysis. Fig 13 shows the ITBS configuration with four offshore nodes in the Bay of Bengal. The gate 157 in Fig 13 indicates that the failure of the fourth node leads to complete system failure. Based on the number of nodes in operation and the MTBF, a maintenance plan has evolved. Depending on the MTBF and the availability targets computed with the recorded data, a minimum of two nodes are required in the Bay of Bengal and one node in Tsunami warning system failure Or25 U(8760h)=0.4601 mission-time=8.76E3 Offshore nodes failure for tsunami data KOutOfN157 4 4/4 U(8760h)=3.5339E-2 mission-time=8.76E3 Mission Control Centre (MCC) failure And77 U(8760h)=0.4403 mission-time=8.76E3 MCC Offshore node 1 failure Offshore node 3 failure Or78 U(8760h)=0.4336 mission-time=8.76E3 Offshore1 Or235 U(8760h)=0.4336 mission-time=8.76E3 Offshore3 Offshore node 2 failure Offshore node 4 failure Or313 U(8760h)=0.4336 mission-time=8.76E3 Or156 U(8760h)=0.4336 mission-time=8.76E3 Offshore2 Offshore4 Fig 13: Trees indicating PoF with ITBS operating with four nodes 267 Venkatesan et al. Assessment of the reliability of the Indian tsunami buoy system Table 5: PFD and SIL levels. PFD = Tolerable frequency of the accident Frequency of the accident wiith no protection Safety integrated level (SIL) Probability of failure on demand (PFD per year) 1 2 3 4 10–1 to 10–2 10–2 to 10–3 10–3 to 10–4 10–4 to 10–5 the Arabian Sea. However, based on the battery replacement needs, the maintenance interval for the offshore nodes will be one year. Two independent nodes, one in the Bay of Bengal and another one in the Arabian Sea, operated and maintained by INCOIS with the proven DART system will serve as a standby, which is not considered in this analysis. 6. Safety integrity level IEC 61508/11 is a standard (Smith and Simpson, 2004; Yoshimura and Sato, 2008; IEC, 2000; Bukowski, 2001) that is essentially a framework for implementing instrumented safety systems, using the principles of the safety life cycle and safety integrity level concepts. Protection systems need to perform their intended operations on demand. PoF is the unavailability of a safety system on demand. If a demand occurs after a time, the probability that the system has already failed is the probability of failure on demand (PFD). It is also defined as the ratio between the tolerable frequency of the accident to the frequency of the accident with no protection (IEC, 2000). The SIL defines the degree of safety protection required by the process and, consecutively, the safety reliability of the system necessary to achieve the function. SIL has four levels, 1 to 4, with the higher number meaning the safer the system. Table 5 describes the various SIL levels with the corresponding PFD. Based on the IEC 61508, the SIL requirements are computed taking into consideration the risk consequence, alternative safety instrumented function (SIF) in place, human occupancy and the demand rate for the SIF. This SIL determination methodology is applied in process and in marine industries (Vedachalam et al., 2014a,b; 2013). A similar approach is adopted here to determine the SIL requirements for the ITBS. 6.1. Determination of the required safety integrity level for the Indian tsunami buoy system Avoidance parameter (P ): Based on the availability or unavailability of an alternative SIF, the parameter is assigned a value of 0 or 1, respectively. In this case, the value is taken as 1, as there is no alternative SIF in place. 268 Occupancy parameter (F ): Based on the human occupancy, the parameter takes the values of 2, 1 and 0 corresponding to continuous, occasional and rare human presence in the mission. In this case, the value is 2. Demand rate parameter (W ): A 100-year-old historical database indicates that an average of five tsunami events per year occurs in the Pacific (Lockridge, 1988; Jin and Bin, 2011). Based on the NIOT return of experiences with the ITBS system installed in the Bay of Bengal and Arabian Sea, the number of events during the period 2007 to 2014 was found to be more than 14 (Srinivasa Kumar et al., 2012), depending on which the system demand rate factor is identified to be more than one event per year. Thus, the demand rate factor W (based on Table 6) is computed to be 9 for the Indian Ocean conditions. Table 7 shows the values taken as the input for the risk consequence parameters. Having computed the values of P, F and W, i.e. 12 (1 + 2 + 9), the summed up values are plotted against the consequence factor in the risk graph matrix shown in Table 8, so as to obtain the required level of SIL. From the risk graph matrix, it is identified that the operating ITBS should comply with SIL 4 level, which is equivalent to the requirements considered for a nuclear power plant (IEEE, 1984). Fig 14 shows the SIL computed using the TOTAL Table 6: Factors for the SIF demand rate Demand rate W9 W8 W7 W6 W5 W4 W3 Factor (W) Often >1/year Frequent 1/1–3 year Likely 1/ 3–10 year Probable 1/10–30 year Occasional 1/30–100 year Remote 1/100–300 year Improbable 1/300–1,000 year 9* 8 7 6 5 4 3 * Value considered for this case Table 7: Risk level assignment data Personnel Environment Financial health Consequence* Catastrophic Catastrophic Catastrophic * Catastrophic, extensive, serious, considerable, marginal, negligible Underwater Technology Vol. 32, No. 4, 2015 Table 8: Risk graph matrix Consequence F+P+W Severity level C 1,2 3,4 5,6 7,8 9,10 11,12 Catastrophic Extensive Serious Considerable Marginal Negligible F E D C B A NR NR NR NR NR NR SIL1 NR NR NR NR NR SIL2 SIL1 NR NR NR NR IL3 SIL2 SIL1 NR NR NR SIL4 SIL3 SIL2 SIL1 NR NR > SIL4 SIL4 SIL3 SIL2 SIL1 NR NR – not required; SIL – safety integrity level Probability of failure on demand 1.2E-4 1.1E-4 1E-4 9E-5 8E-5 7E-5 6E-5 5E-5 4E-5 3E-5 2E-5 1E-5 0 SIL3 SIL4 0 1 2 3 4 5 6 7 8 9 10 11 Hour(s) Fig 14: Achieved SIL4 for ITBS with one node in operation GRIF SIL module based on the PoF results obtained from the fault tree analysis. It is seen that the ITBS configuration with one offshore node in operation should have a proof test interval (PTI) of around 10 hours, so as to confirm it to SIL 4 requirements, independent of the response during a tsunami event. This requires system and operational health to be verified and confirmed every 10 hours to the MCC. However, considering the disastrous nature of the event, SIL levels greater than SIL 4 are required. The proof test data involve the transmission of system health parameters, including battery status, sea water column and buoy position information from each offshore node to the MCC every hour. This ensures that each node complies with the highest standards and levels of safety. 7. Summary and conclusion The present paper discusses the reliability of the ITBS installed in the Bay of Bengal and the Arabian Sea. The influence of technical maturation by incorporating an effective and reliable energy storage system, firmware improvements and network redundancy is quantified with computations. A reliability analysis carried out on the base case and matured systems indicates that the MTBF of a single offshore node in the Bay of Bengal communicating to the NIOT-MCC has increased from 0.3 years in 2007 to 0.9 years in 2013. It is identified that, with the operational, matured ITBS, it is possible to have an MTBF of more than 1.6 years and 1.4 years with four and one offshore node/s in the Bay of Bengal and Arabian Sea, respectively. However, based on the battery replenishment needs and sensor maintenance needs, the maintainability schedule is arrived at as one year, which could provide an availability of more than 98.5%. Based on the IEC-based HSE analysis, it is identified that the ITBS system needs to comply with SIL 4 levels of reliability. The safety analysis reveals that a configuration with one offshore node reporting every 10 hours to the mission control centre, it is possible to attain SIL levels better than the most stringent SIL4. This complies with the present reporting duration of every hour, which is independent of the ITBS operation during the actual tsunami event. The present study has given the confidence on the ITBS reliable support to India’s Tsunami Early Warning System in the light of societal importance. In view of the uniqueness and considering the relevance and importance to the coastal community, this reliability engineering model could be adapted to other regions with the relevant data. Acknowledgements The authors thank the Ministry of Earth Sciences, Government of India for funding this project. The authors are indebted to the Directors of National Centre for Antarctic and Ocean Research (NCAOR), Goa and INCOIS, Hyderabad, for their support. The authors also thank the staff of the Ocean Observation Systems (OOS) group, Vessel Management Cell of the NIOT, and the ship staff for their excellent help and support on-board. References Arul Muthiah M, Sundar R, Thamizh Mugilan A, Venkatesan R. (2011). Analysis on under water seismic event on June 12, 2010 recorded by indigenous tsunami early warning system. In: Proceedings of OSICON ‘07, 1–7. Braddock RD and Carmody O. (2001). Optimal location of deep sea tsunami detectors. International Transactions in Operations Research 8: 249–258. Brown RG. (1983). Introduction to Random Signal Analysis and Kalman Filtering. Canada: John Wiley & Sons, 484pp. 269 Venkatesan et al. Assessment of the reliability of the Indian tsunami buoy system Bukowski JV. (2001). Modeling and analyzing the effects of periodic inspection on the performance of safety – Critical systems. IEEE Transactions on Reliability 50: 321–329. FIDES. (2010). FIDES Guide 2009, Edition A: Reliability Methodology for Electronic Systems. Available at http:// fpga.elektro.agh.edu.pl/downloads/Dydaktyka/MPMS/ Reliability/UTE_FIDES_Guide_2009_-_Edition_ A%20-%20September%202010_english_version.pdf, last accessed <12 January 2015>. Fine IV, Rabinovich AB, Bornhold BD, Thomson RE and Kulikov EA. (2005). The Grand Banks landslidegenerated tsunami of November 18, 1929: Preliminary analysis and numerical modelling. Marine Geology Journal 215: 45–57. Gasiewski AJ, Voronovich AG, Godin OA, Mader GL, Gutman SI and Baringer MN. (2005). Advanced techniques for tsunami detection and hazard mitigation. Internal NOAA Review Document, 36–42. Groen L, Botten L and Blazek K. (2010). Optimizing the location of tsunami detection buoys and sea-level monitors in the Indian Ocean. International Journal of Operational Research 8: 174–188. Holgate SJ. (2007). On the decadal rates of sea level change during the twentieth century. Geophysical Research Letters 34: L01602. Indian National Centre for Ocean Information Services (INCOIS). (2011). Indian Tsunami Early Warning Centre (ITEWC). RTSP Services User Guide. Version 2. Available at www.incois.gov.in/documents/tsunami/rtsp-userguide. pdf, last accessed <15 January 2015>. Institute of Electrical and Electronics Engineers (IEEE). (1984). IEEE 500-1984 IEEE Guide to the collection and presentation of electrical, electronic, sensing component, and mechanical equipment reliability data for nuclear power generating stations. IEEE and John Wiley & Sons. IEEE. (1997). IEEE Standard 493-1997, Recommended practice for the design of reliable industrial and commercial power systems. IEEE Standards Boards. International Electrotechnical Commission (IEC). (2000). IEC 61508. Functional safety of electrical/electronic/ programmable electronic safety-related systems. Geneva: IEC, 12pp. Jin D and Bin J. (2011). Managing tsunamis through early warning systems: A multidisciplinary approach. Ocean and Coastal Management 54: 189–199. Kesava Kumar B, Arul Muthiah M, Elango S, Gowthaman D, Kaliyaperumal P, Senthil Kumar P, Sridharan R and Venkatesan R. (2013). Design of optimal power source for NIOT offshore moored buoy system. In: Proceedings of Ocean Electronics (SYMPOL), Kochi, 23-25 Oct, Kochi, India, 189–195. Linden D and Reddy TB. (2002). Handbook of Batteries. Third edition. New York: Tata McGraw-Hill publications, 1,453pp. Lockridge PA. (1988). Historical tsunamis in the Pacific basin. In: El-Sabh MI and Murty TS. (eds). Proceedings of the International Symposium on Natural and Man-Made Hazards, 171–181. Meinig C, Stalin SE, Nakamura AI and Milburn HB. (2005). Real-Time Deep-Ocean Tsunami Measuring, Monitoring, and 270 View publication stats Reporting System: The NOAA DART II Description and Disclosure. Pacific Marine Environmental Laboratory-NOAA, 15pp. Meldrum D. (2009). Review of satellite data telecommunication facilities. Joint WMO/IOC Technical Commission for Oceanography and Marine Meteorology (JCOMM). 18–22 May, Geneva, Switzerland. Available at ftp://ftp.wmo. int/Documents/PublicWeb/amp/mmop/documents/ sot/SOT-V/docs/SOT-V-Doc-I-5.2(2)-Satcomm-review. pdf, last accessed <12 January 2015>. Ramadass GA, Vedachalam N, Sudhakar T, Ramesh R, Jyothi VBN, Prashanth NB and Atmanand MA. (2014). A study of the algorithms for the detection of tsunami using an ocean bottom pressure recorder. Marine Technological Society Journal 48: 76–83. SINTEF. (2009). OREDA: Offshore Reliability Data, Fifth Edition. Det Norske Veritas. Smith DJ and Simpson KGL. (2004). Functional Safety – A Straight Forward Guide to Applying IEC 61508 and Related Standards. Burlington, MA: Elsevier Butterworth Heinemann, 280pp. Srinivasa Kumar T, Nayak S, Patanjali Kumar C, Yadav RBS, Ajay Kumar B and Sunanda MV. (2012). Successful monitoring of the 11 April 2012 tsunami off the coast of Sumatra by Indian Tsunami Early Warning Centre. Current Sciences Journal. 102: 1,519–1,526. Sundar R, Arul Muthiah M and Venkatesan R. (2013). Development of application software for real time tsunami buoy data reception. In: Proceedings of COSMOS, 3–7. US Department of Defense (1991). Military Handbook MIL HDBK-217 F: Reliability prediction of electronic equipment. Washington, DC: Department of Defense. Vedachalam N, Ramesh R, Muthukumaran D, Subramanian AN, Aarthi A, Ramadass GA and Atmanand MA. (2013). Reliability centered development of deep water ROV ROSUB 6000. Marine Technological Society Journal 47: 57–73. Vedachalam N, Ramadass GA and Atmanand MA. (2014a). Reliability centered modeling for development of deep water human occupied vehicles. Applied Ocean Research 46: 131–143. Vedachalam N, Ramadass GA and Atmanand MA. (2014b). Review of technological advancements and HSE-based safety model for deep water human occupied vehicles. Marine Technological Society Journal 48: 25–42. Venkatesan R, Arul Muthiah M, Ramesh K, Ramasundaram S, Sundar R and Atmanand MA. (2013). Satellite communication systems for ocean observational platforms: Societal importance and challenges. Journal of Ocean Technology 8: 47–73. Wijetunge JJ. (2009). Field measurements and numerical simulations of the 2004 tsunami impact on the south coast of Sri Lanka. Ocean Engineering 36: 960–973. Yilmaz M, Migliacio P and Bernard EN. (2004). Broad-band vibrating quartz pressure sensors for tsunameter and other oceanographic applications. In: IEEE Proceedings of Oceans’04, 9–12 November, Kobe, Japan, 1,381–1,387. Yoshimura I and Sato Y. (2008). Safety achieved by the safe failure fraction (SFF) in IEC 61508. IEEE Transactions on Reliability 57: 662–669.