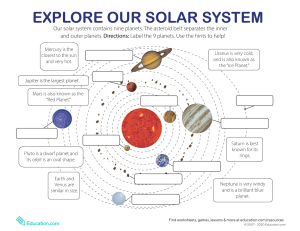
“THE SOLAR SYSTEM” LESSON 3- - -NOTE-TAKING SHEET A planet must do three things: (1) it must orbit a star (2) big enough to have enough gravity to force a spherical shape (3) big enough that its gravity clears away any objects of a similar size near its orbit The closer a planet is to the Sun, the faster it revolves o Mercury orbits the Sun once every 88 days; Neptune orbits once every 165 Earth years Planets & dwarf planets Dwarf planets orbit the Sun & are nearly spherical in shape, but they share their orbital paths with other objects similar in size EX: Pluto is now a dwarf planet A moon is a natural satellite that orbits an object other than a star Asteroids are small, rocky objects that orbit the Sun; MOST are located in the asteroid belt Comets are small, rocky icy objects that orbit the Sun; as they near the Sun, the ice melts & the water forms a “tail” behind the comet Meteoroid A small solid particle that travels through space, if they burn up in earth's atmosphere, they are called meteor. A meteoroid becomes a meteorite only if it impacts Earth Inner Planets (called the rocky planets b/c their surfaces are solid & rocky) Mercury Smallest planet, only other inner planet w/magnetic field (beside Earth) The "Incredible Shrinking" planet .Venus Hottest planet; thick atmosphere of CO2; hot b/c of the greenhouse effect; has volcanoes Venus spins the opposite direction of Earth Mars Has two moons, reddish in color due to iron oxide (rust), the "Red" planet Asteroid belt - separates the inner & outer planets; made of rocks called asteroids outer Planets (called the gas giants OR ice giants b/c made mostly of gas OR ice) Jupiter Largest planet; contains more mass than the rest of the planets combined Has the most moons, and has a large red spot This planet is known for having prominent bands of coloring and storms. Saturn The planet that could float on water, b/c it is made mostly of hydrogen gas Over 60 moons & seven rings (rings made mostly of ice) Uranus Blue green color; Thin, dark rings & rotates tilted on its side; over 27 moons Neptune Appears blue when viewed through a telescope, has the highest winds in solar system, and rotates counterclockwise. “THE SOLAR SYSTEM” LESSON 3- - -NOTE-TAKING SHEET A planet must do three things: (1) it must ___________________ (2) big enough to have enough ________to force a ___________shape (3) big enough that its gravity __________ any objects of a similar size near its orbit The closer a planet is to the Sun, the ________it revolves o Mercury orbits the Sun once every ________; Neptune orbits once every ____Earth years Planets & dwarf planets Dwarf planets orbit the Sun & are nearly _____________in shape, but they share their ________________with other objects similar in size EX: ________is now a dwarf planet A moon is a _____________________that orbits an object other than a star Asteroids are small, _______objects that orbit the Sun; MOST are located in the ___________ Comets are small, __________objects that orbit the Sun; as they near the Sun, the ice melts & the water forms a “________” behind the comet Meteoroids A small solid particle that ________________, if they __________ in earth's atmosphere, they are called _______. A meteoroid becomes a meteorite only if it ________Earth Inner Planets (called the rocky planets b/c their surfaces are _______& ________) Mercury __________planet, only other inner planet w/__________field (beside Earth) The "Incredible _____________" planet .Venus ________planet; thick atmosphere of CO2; hot b/c of the greenhouse effect; has volcanoes Venus spins the _____________direction of Earth Mars Has two moons, __________in color due to iron oxide (_____), the "Red" planet Asteroid belt - separates the ______& ______planets; made of _____called asteroids outer Planets (called the _________OR _________b/c made mostly of gas OR ice) Jupiter ___________planet; contains more ________than the rest of the planets combined Has the most ________, and has a large ____________ This planet is known for having prominent bands of coloring and ________. Saturn The planet that could ________on water, b/c it is made mostly of ___________gas Over 60 moons & ________rings (rings made mostly of _____) Uranus ___________color; Thin, dark rings & rotates ______________; over 27 moons Neptune Appears _____when viewed through a telescope, has the highest ______in solar system, and rotates ________________.