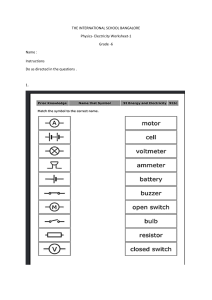
Lecture 3 Design as an Inverse Problem and its Pitfalls “What is right to ask”, an important thing in computational and optimal design, illustrated with the “design for desired mode shapes” problem. Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh Slide 3.1 Contents • Design for desired mode shapes – What is wrong with the optimal synthesis formulation? – Direct synthesis technique • of a bar • of a beam – Analytical solutions and insights – Solution using discretized models • Stiff structure and compliant mechanism design problem formulations—a summary – Continuous model – Discretized model Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh Slide 3.2 Why design for mode shapes? • Resonant MEMS – Capacitive resonant sensors – Micro rate gyroscope • AFM (atomic force microscope) cantilevers See: Pedersen,N., “Design of Cantilever Probes for Atomic Force Microscopy (AFM),” Engineering Optimization, Vol. 32, No. 3, 2000, 373-392. • Swimming and flying mechanisms • Acoustics, … Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh Slide 3.3 Resonant-mode micromachined pressure sensor Resonant beam Top view Capacitance is measured in this gap Side view Pressure The mode shape of the beam influences the sensitivity of the sensor. Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh Slide 3.4 The cantilever in atomic force microscopy (AFM) (in the resonant mode) Laser Detector When AFM operates in the resonant mode, it helps to shape the cantilever to have a mode shape that has larger slope towards the tip. Pedersen,N., “Design of Cantilever Probes for Atomic Force Microscopy (AFM),” Engineering Optimization, Vol. 32, No. 3, 2000, 373-392. Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh Slide 3.5 Rate gyroscope with a micromachined vibrating polysilicon ring M. Putty and K. Najafi, “A Micromachined Vibrating Ring Gyroscope,” Tech. Digest of the 1994 Solid State Sensors and Actuators workshop, Hilton Head Island, SC, pp. 213-220. Two degenerate mode shapes Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh Slide 3.6 Principle of the rate gyroscope Foucault pendulum Wine glass Ring Plane of oscillation rotates All of the above have degenerate pairs of mode shapes. When one mode shape is excited, the rotation of the base causes energy-transfer to the other mode due to Coriolis force. Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh Slide 3.7 Design the spokes for improved mode shapes (and better sensitivity) (Lai and Ananthasuresh, 1999) Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh Slide 3.8 Design for a desired mode shape of a bar Area of c/s Axially deforming bar A(x ) d dv EA( x) A( x)v( x) 0 dx dx Analysis: Given: Synthesis: Given: A( x), , E Find: Natural frequency Mode shape v(x), v( x), , E , Find: A(x ) Ev "( x) v ( x) A( x) A( x) 0 Ev ' ( x) Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh Slide 3.9 Direct and optimal synthesis techniques Ev "( x) v ( x) A( x) A( x) 0 Ev ' ( x) v (x ) Solving this “inverse” differential equation is the direct synthesis technique Designed error e(x ) Desired x L Minimize e( x) 2 dx A( x ) 0 Subject to L * A ( x ) dx W 0 Finding the area profile to minimize the integrated error is the optimal synthesis technique. 0 Eigenequat ion Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh Slide 3.10 Direct synthesis solution Ev "( x) v ( x) A( x) A( x) 0 Ev ' ( x) Solution for area of c/s ( x ) dx A ( x) Ce Can Ev "( x) v ( x) ( x) Ev ' ( x) be specified also? v( x) 0 decides what should be! Furthermore, boundary conditions decide what mode shapes are possible; so, we cannot ask whatever we wish. Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh Slide 3.11 Some examples Desired mode shape sin 2L ( x 1) 1 2 xx 2 Frequency must be… (x) v (x) x (to cancel off the denominator in (x ) ) E 4L2 sin 2xL sin 2xL 2 E 2L cos 2xL 2 / E x2 x 2( x 1) Area of c/s 2 / E x x 2 (1 2 x) A (x) E 2 / (4 L ) 2 e 0 dx C 2E / Ce 8E / Ce 2( x x Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh x 12 x 2 2 ) Slide 3.12 Desired mode shape for a beam d 2 d 2w EI 2 Aw 0, 2 dx dx 2 Assume thatI A as before. Inverse eigenproblem for the beam: wA 2 wA ( wiv w) A 0 E Solution? What are the conditions on the frequency to make a mode shape valid? Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh Slide 3.13 Discretized model Using finite-difference derivatives…for a cantilever beam: wA 2wA ( w w) A 0 Kw Mw E iv a1 b 1 c1 K 0 0 0 b1 c1 0 0 0 a2 b2 c2 0 0 b2 a3 b3 c3 0 c2 b3 a4 b4 0 0 0 0 0 a N 1 0 0 0 0 bN 1 0 0 0 0 bN 1 a N k i 4k i 1 k i 2 l2 k k bi i 1 2 i 2 l ki2 ci 2 l ai ki EAi / l 3 M is a diagonal matrix with M i ,i Ai l. Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh Slide 3.14 Re-arrange the variables… C11 C12 0 C 22 CA 0 0 0 0 0 0 where C1,1 Eh 2 12l 3 0 C23 C24 0 0 C N _ 2, N 2 C N 2, N 1 0 0 C N 1, N 1 0 0 0 C13 0 A1 0 A 2 0 A3 0 C N 2, N C N 1, N AN N 1 C N , N N N 0 w1 lw1 Ci ,i 1 6El3 ( wi 1 2 wi wi 1 ) Ci ,i 2 12El 3 ( wi 2 wi 1 wi 2 ) Ci ,i 12El 3 ( wi 2 2 wi 1 wi ) lwi C N , N 12El 3 ( wN 2 2 wN 1 wN ) lwN Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh Slide 3.15 Solution and conditions on frequency and mode shape From the last row of the previous system of equations: E ( wN 2 2wN 1 wN ) 12 l 4 wN And then, solve for the areas: AN 1 Ai C N 1, N AN C C N 1, N 1 i ,i 1 Ai 1 C i ,i 2 Ai 2 C i ,i For details, see: Lai, E. and Ananthasuresh, G.K., “On the Design of Bars and Beams for Desired Mode Shapes,” Journal of Sound and Vibration, Vol. 254, No. 2, 2002, pp. 393-406. Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh Slide 3.16 Return to the differential equation… wA 2wA ( w w) A 0 E iv For a cantilever, at the free end, i.e., at x L : wL wL 0 iv E w L ( wLiv wL ) A L 0 E wL (assuming AL is not zero) A condition to ensure positive : wL wLiv 0 Another condition due to Gladwell: The number of sign changes in the mode shape and its first derivatives must be the same. See: Inverse Vibration Problems, G. M. L. Gladwell, 1986. Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh Slide 3.17 An example: valid mode shapes Explore which 6th degree polynomials are valid mode shapes for a cantilever: wx ao a1 x a2 x 2 a3 x 3 a4 x 4 a5 x 5 a6 x 6 With essential and natural boundary conditions imposed: wx 6a4 L2 20a5 L3 45a6 L4 x 2 2 2a4 L 5a5 L2 10a6 L3 x 3 a4 x 4 a5 x 5 a6 x 6 Two other conditions: u L u LIV 24 L2 3a 4 11a5 26a6 L2 a 4 5a5 15a6 L2 0 The number of sign changes in the mode shape and its first derivatives must be the same. Valid 1st mode shapes Valid 1st and 2nd mode shapes Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh Slide 3.18 Some examples of mode shapes and area profiles a6 = 2 a6 = 1 a6 = 4 a6 = 0 a6 = 3 For details, see: Lai, E. and Ananthasuresh, G.K., “On the Design of Bars and Beams for Desired Mode Shapes,” Journal of Sound and Vibration, Vol. 254, No. 2, 2002, pp. 393-406. Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh Slide 3.19 Now, we are ready for optimal synthesis… w(x ) Designed error e(x ) Desired x L Minimize e( x) 2 dx A( x ) 0 Subject to L * A( x) dx W 0 0 Eigenequat ion Now, given a mode shape, we check if it is valid. If it is not, we can give the closest valid polynomial (or other) mode shape and get a solution. Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh Slide 3.20 An example Given (invalid) mode shape First derivative of the mode shape Area profile Rectified polynomial mode shape Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh Slide 3.21 Return to stiff structure design Minimize 1 strain energy σ : ε dV or mean compliance f b u d f t u d 2 Subject to * dV V 0 σ fb 0 Force ? ft fb body force Design variables are in . Volume constraint Equilibrium equation + boundary conditions (displacements and tractions) σ n ft on t u u specified on u σ D: ε Stress-strain relationship 1 ε u uT Strain-displacement relationship 2 Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh Slide 3.22 Stiff structure design Minimize strain energy 1 T σ ε dV or mean compliance f b T u d f t T u d 2 Subject to * dV V 0 xx xy xz f bx 0 x x x yx yy yz f by 0 y y y zx zy zz fz 0 z z z xx yy zz σ xy yz zx u x x u y y u z z u x y u y z u z x u y x u z y u x z σ Dε xx nx xy n y xz nz f tx yx nx yy n y yz nz f ty on t Design variables zx nx zy n y zz nz f tz u u specified on u ε 1 2 1 12 2 Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh Slide 3.23 With the discretized model… Strain energy Minimize K Mean compliance or Fi U i 1 T U KU 2 Subject to Ve V 0 Volume constraint KU F Equilibrium equation * Stiffness matrix = K Displacement vector = U Design variables are in K . 1 1 T Strain energy = SE σ :ε dV U KU 2 2 Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh Slide 3.24 Return to compliant mechanism design volume dV Minimize Subject to σ : ε dV 0 Flexibility (deflection) constraint 1 σ : ε dV S * 0 Stiffness (strain energy) constraint 2 σ f b 0 Equilibrium equations + boundary conditions (displacements and σ f b 0 tractions) Force σ, ε ? σ D: ε ft σ, ε Unit dummy load ft 1 Design variables are in . Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh Slide 3.25 Alternatively… Since nonlinear constraints are more difficult to deal with, and multiple constraints make optimization harder, the problem is reformulated as: Minimize 1 w σ : ε dV (1 w) σ : ε dV 2 Subject to or σ : ε dV σ : ε dV * dV V 0 σ fb 0 σ fb 0 Linear combination or ratio of two conflicting objectives. σ D: ε Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh Slide 3.26 With the discretized model… Minimize K 1 w UT KU (1 w) U T KU 2 or Subject to U T KU 1 T U KU 2 Ve V 0 * KU F KU F Mutual strain energy = MSE σ :ε dV U KU T 1 1 T Strain energy = SE σ :ε dV U KU 2 2 Output spring constant 1 2 koutuout 2 MSE uout sign ( MSE ) MSE Obj. function t o be maximized , 2 SE uin SE f inuin Geometric advantage Mechanical efficiency Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh Slide 3.27 Modeling the work-piece in the compliant mechanism design problem Force ft ? ? kout Output spring to model the work-piece Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh Slide 3.28 Main points • An optimal design problem, as posed, should make sense. • Design for desired mode shapes problem – Restrictions on “desired” mode shapes and frequencies • Stiff structure design problem statement revisited • Compliance design problem statement revisited – Flexibility and stiffness requirements should be optimally balanced – Work-piece can be modeled as an output spring Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh Slide 3.29 Let’s make up some specifications… a) For a stiff structure b) For a compliant mechanism … so that we can compare designs given by the optimization program (PennSyn) and designs conceived by You! Stiff Structures, Compliant Mechanisms, and MEMS: A short course offered at IISc, Bangalore, India. Aug.-Sep., 2003. G. K. Ananthasuresh Slide 3.30