Solenoid Valve Control for Internal Combustion Engines
advertisement

IFAC
Copyright C> IFAC Mechatronic Systems,
California, USA, 2002
c:
0
[>
Publications
www.elsevier.comllocatelifac
MODELING AND CONTROL OF SOLENOID
VALVES FOR INTERNAL COMBUSTION
ENGINES
Charles Robert Koch . ,1 Alan F. Lynch •• ,1
Ryan R. Chladny·
• Dept. of Mechanical Engineering, University of Alberta,
Edmonton AB, T6G 2GB Canada
•• Dept. of Electrical and Computer Engineering,
University of Alberta, Edmonton AB, T6G 2V4 Canada
Abstract: This paper considers the modeling and control of solenoid valve actuators
used for gas exchange in internal combustion engines. Solenoid valves are an
emerging technology which offers performance benefits over traditional camshaft
based valve timing. Maintaining the impact velocity of the armature and valve
is a primary performance requirement in order to minimize acoustic noise and
mechanical wear. To control this velocity, the finite element method (FEM) is used
to generate static force and flux data which is validated experimentally. A flatnessbased control provides linear tracking error dynamics assuming current control.
A reduced-order nonlinear velocity/disturbance observer ensures linear estimate
error dynamics for constant force disturbances. The estimated state feedback is
simulated using the FEM model flux and force data and acceptable impact velocity
and acceleration are achieved in face of model uncertainty disturbance. Copyright
© 2002 IFAC
Keywords: Electromagnetic Devices, Valves, Finite Element Method, Internal
Combustion Engines, Nonlinear Control, State Observers, Feedforward
Compensation
1. INTRODUCTION
mance gains have been demonstrated in laboratory settings (Barros da Cunha et al., 2000),
(Rassem, 2001), commercial success depends on
the development of accurate models amenable
to the design of cost-effective, high-performance
controllers. This paper proposes a flatness-based
nonlinear control scheme for a real solenoid valve
and demonstrates it's performance in a simulation
incorporating force and flux data derived from a
FEM model.
The use of solenoid actuators to control the gas
exchange valves of a spark ignition internal combustion (IC) engine can significantly improve engine fuel consumption and reduce hazardous exhaust emissions. Performance benefits of solenoid
actuation over a conventional camshaft engine
result from being able to optimize individual
valve timing over the complete engine load-speed
range (Pischinger et al., 2000) . Although perfor-
The development of an optimal design for solenoid
valve actuators has received recent attention and
a number of configurations have been proposed. A
common feature of the design alternatives is their
use of springs in order to reduce electrical energy
1 This research was partially supported by the Natural
Sciences and Engineering Research Council of Canada
(NSERC), under Research Grant numbers 249553-02,
249681-02.
197
input. By storing energy in the springs, rapid
motion with large strokes is possible with realistic
electrical energy requirements. The high system
energy density provided by the springs can also
help overcome the substantial combustion pressure forces acting on the valve. The use of springs
in hinged or c1apper-type actuators is discussed
in (Kawase et al., 1991), (Cristiani et al., 2002).
Here the armature is constrained to rotate about
a fixed pivot. The gas exchange valve is connected
to the armature and has linear motion. By choosing the location of the attachment point of the
valve to the armature, the mechanical force lever
ratio can be varied. The result is smaller airgap
lengths and improved force characteristics. Work
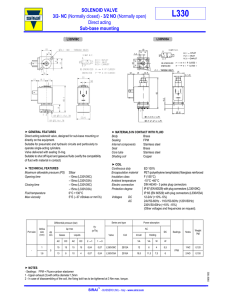
in (Pischinger and Kreuter, 1984) considers a
pre-Ioaded two-spring linear motion configuration
shown in Figure 1. This paper considers a real prototype valve provided by Daimler-Chrysler which
has this configuration.
Fig. !. Schematic of the two-spring solenoid actuator valve.
The dynamic equations which describe solenoid
valve behaviour are nonlinear and many of the
model parameters vary with operating conditions
and wear. Further, solenoid valves are usually
modeled in isolation from the complex combustion
gas force dynamics. That is, for simplicity these
forces are considered as unknown disturbances to
the valve dynamics . The development of control
schemes which provide reliable high performance
operation has received recent attention . Most control schemes attempt to limit the impact velocities of the armature on the stator using some
form of position and velocity feedback derived
from a linear approximation of the system. In
(Konrad, 1998) linear control methods are used
to design an estimated state-feedback trajectory
tracking controller. A method based on controlling kinetic and potential energy is detailed in
(Schmitz, 1995). Adaptive feed forward methods
for disturbance rejection are presented in (Koch
and Mockel, 2001). This paper is organized as
follows . Section 2 outlines the controller specifications and system performance requirements.
Section 3 details the use of the FEM for modeling
the magnetostatics of the solenoid valve. Section 4
derives the nonlinear flatness-based control and
validates its performance using data from the
FEM model. Finally, conclusions are drawn in
Section 5.
least 5500 RPM with sufficient engine breathing
is required by modern spark ignition IC engines
to obtain reasonable engine power density. As
well, armature impact velocities must be less than
0.1 m/s to maintain acceptable levels of acoustical
noise and mechanical wear (Wang et al., 2002).
Additionally, electrical energy consumption must
be reduced to minimize engine fuel consumption
which is a main objective for electronic valve actuation. Maintaining system performance in face
of parameter variations due to wear and changing
operating conditions are also a major concern. For
example, parameter variation is inevitable with
under hood temperatures ranging from -40°C to
l60°C . Finally, stringent position sensor accuracy
requirements are imposed by the demanding motion planning constraints. These sensor requirements result from the velocity constraints and the
high accelerations just before armature impact.
For the solenoid valve considered here, this large
acceleration combined with an acceptable impact
velocity tolerance leads to a sensor accuracy of
approximately lOp-m. At present, the cost of a
sensor with this accuracy over a 8mm stroke limits commercialization potential and has prompted
research into alternate sensing methods (Roschke
and Bielau, 1995), (Rossi and Tonielli, 2001),
(Butzmann et al., 2000).
2. CONTROLLER SPECIFICATIONS
Energy efficiency and density constraints are addressed in this paper via the choice of the twospring linear actuator shown in Figure 1. To
reduce the sensor accuracy requirements which
result from high accelerations near impact, the
nonlinear flatness- based control aims to regulate
low acceleration (as well as velocity) near impact.
Due to stringent multiple conflicting performance
specifications, control design for the solenoid actuator is a challenging problem. A primary requirement due to engine RPM time constraints is a
3-4 ms travel time over a minimum 8 mm stroke.
This is because a maximum engine speed of at
198
4. FLATNESS-BASED CONTROL
1600 --,---....,-....,-....,---.----.---.---,---.
1----· FEA
I
1- - Experimental i
l
Lumped Parameter Modeling
--i
The armature position of the solenoid valve system, shown schematically in Figure 1, is denoted
by x and the origin of the x-coordinates is defined at the midpoint between the two coils. The
armature is mechanically constrained to move on
x E [-4,4J mm. Assuming there is no leakage flux,
no magnetic saturation, the E-shaped electromagnet has an inductance of the form
I
3000 Amp-turns
i
//
1500 Amp-turns
./
/
500 Amp-turns
l
i
1
~
(1)
o
246
where f3 and /\, are related to the number of turns,
area and lengths of the flux paths, and magnetic
permeabilities of the air and iron core of the coil.
Assuming no coupling between the coils, the force
F2 exerted by Coil 2 on the armature is obtained
by differentiating the coenergy function
8
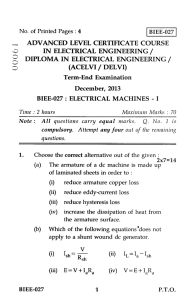
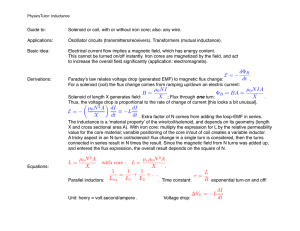
Armature Displacement [mm]
Fig. 2. Comparison of FEM model and experimental force data at three current levels.
3. FEM MODELING
with respect to position, where A2(X, i 2) =
L2(X)i2 is the flux linkage of the coil, and i2 is
the coil current. Thus, the force equation is
A FEM model is constructed in order to generate
flux and force data as a function of armature
position and coil current. This data is to be used
below in Section 4 in order to accurately simulate
the proposed control scheme. The magnetostatic
behavior of the slightly off-round elliptical coil
is analyzed using the commercial program ANSYS. Although the coils are slightly elliptical, they
are modeled approximately in two dimensions by
assuming axisymmetric geometry. Quadrilateral
elements with nonlinear capability are used to
model the actuator domain, and far field effects
are represented using infinite boundary elements.
The permeability of the magnetic material's nonlinear dependence on magnetic field intensity is
incorporated. By energizing only a single coil at a
time (i.e., assuming zero coupling between coils),
static force and flux data are computed over a
grid of airgap and current data. ANSYS uses a
magnetic vector potential A such that ~ x A = B,
where B is the magnetic flux density, and solves
the following Maxwell's equations for magnetostatics:
-f3i~
(/\,+X)2'
Assuming both coils have identical construction
and using the same reasoning as above, the inductance of the first coil is
LI(X)
= 2f3/(/\, -
x).
(2)
The force exerted by the first coil on the armature
is
FI(x, id = f3ii!(/\, - x)2.
Newton's law for the armature gives
..
x
(ii
= -mf3 (/\'-x )2
i~)
- (/\,+x )2
.
+ A(x, x),
(3)
where A(x,x) = -(k.x + Bx)/m, k.x is the
restoring force due to a spring of stiffness k s , Bx
is viscous frictional force of the mechanism, and m
is the mass of the armature. To simplify notation,
ks is the combined stiffness of both springs_
The dynamics of the coils are
dAk (X,2k
.) = Vk Tt
~xH=J
R'2k,
k
= 1,2,
(4)
where Vk is the input voltage applied to Coil k,
and R is the resistance of each coil. Taking ik as
a state, the state-space form of (4) is
~·B=O,
where H is the magnetic field intensity and J is
the current density.
dik
1
dt
= Lk(X)
The force data from the FEM model is shown in
Figure 2 as a function airgap at three current
values (79 coil turns). In order to validate the
FEM model, experimentally measured force data
is also plotted for comparison. The FEM data
agrees within 10% of the experimental results
indicating the high fidelity of the model.
(
Vk -
R'
2k -
dLk ( ) ..2 ) k
1 2
dx x X k , = , .
Substituting (2) and (1) into this expression gives
di l
xi}
/\, - X
= --(VI - Rid - - dt
2f3il
/\, - X
di2
/\, + X (
R.)
xi2
- = - - V2 - 22 + - -.
dt
2f3i2
/\, + X
-
199
The parameters R = .48 n, m = .1558 kg, B =
6.59 Ns/m ks = 174 N/mm can be readily measured. The parameters K, = 4.07 mm and /3 =
1.45 . 10- 6 Nm 2 / A2 are obtained by taking a least
square fit to the force data obtained from the FEM
model described in Section 3.
Setting i2 = 0 in (6d) and substituting the righthand side of (8) gives
i l = /;(K,-Ylh/Yld - kltl - kOYl - A(YI.lil),
(9)
which is real-valued for YI - A(YI, YI) ~ O. Writing
out (3) in terms of YI with il = 0 gives the
expression for i2 :
Flatness-based Control
A flatness-based static state-feedback current control which makes the armature position converge
exponentially to a desired trajectory is derived
assuming both coil currents can be directly controlled. As well, in order to reduce energy loss,
a complementary current condition is imposed to
ensure only one coil current is nonzero at any
time. Work in (Levine et al., 1996) provides a convenient differential flatness framework for solving
this trajectory tracking problem. Two differences
between the magnetic bearing system considered
in (Levine et al., 1996) and the solenoid valve
considered here are the presence of a spring force
and the absence of gravity.
i2
if YI - A(YI, yd ~ 0
if YI - A(Yl, yd ::; 0
(11)
The above condition compares the acceleration
due to the spring plus viscous friction with the actual acceleration. If this difference is positive then
Coil 1 is activated, otherwise Coil 2 is activated.
(5a)
X
i2
In the simulations below, the control (9) and
(10) is modified in two ways. First, condition
(11) is regularized to an "almost complementary
condition" in order to avoid singularity problems.
Secondly, a high-gain voltage feedback is used to
track (9) and (10). That is,
//3 .
(5b)
m
Note that -y~ is the armature acceleration due
to current in Coil 2. Using (5) and (3), the inputs
and states can be expressed as functions of the
independent flat outputs YI and Y2 and a finite
number of their time derivatives:
Y2 =
K,+X
x = YI
i2 = / ; Y2(K,
Vk = -Kk(ik - ikd),
+ yd
k = 1,2,
where Kk > 0 are chosen sufficiently large and ikd
are the desired currents given by (9) and (10) .
A singular perturbation argument can be used
to show tracking of position can be recovered for
sufficiently large gains Kk (Levine et al., 1996).
(6a)
(6b)
X=YI
YId + kltl + kOYI,
(10)
which is real-valued for Yl - A(Yl, yd ~ O. The
sign of YI - A(YI, YI) determines which current
should be used to:',ensure YI converges exponentially to its desir~d '~~lue. This current complimentary condition car{'be stated in terms of a
condition on YI and Y2
Two fictitious so-called flat outputs YI, Y2 are
defined as
YI =
= / ; (K,+YdVA(YI, YI) -
(6c)
·2 m(K,-x)2( "
2
A(
.))
tl =
/3
YI + Y2 YI , YI
i l = / ; (K, - Ylhjih
+ y~ -
Disturbance and velocity observer
A(YI, YI) '
(6d)
In practice, the force equation (3) contains disturbance terms which are due to cylinder pressure
transmitted from the valve, complex frictional
forces which are difficult to model, and model
assumptions such as no magnetic saturation. Assuming a constant disturbance force, (3) becomes
where (6d) is real-valued if iit + y~ - A(YI,YI) ~
o which is equivalent to ih - A(YI, YI) ~ O.
The implication of (6) is that the coil system
is differentially flat and convenient methods for
solving trajectory tracking problems exist (Fliess
et al., 1995; Fliess et al., 1999) .
..
Letting YId denote the desired trajectory for the
armature and YI = YI - YId denote the tracking
error, the objective is to achieve linear error
dynamics
/3
X=
m
d=
0,
(ii
K,-X )2 (
.
i~) +A(x, x)+d
( K:+x )2
where d denotes the disturbance acceleration. The
velocity x required for state feedback is not directly measured. Hence, a reduced-order nonlinear observer is proposed to generate estimates of
the disturbance and armature velocity which are
denoted by d and £ respectively. The observer
(7)
Provided ko and kl are positive, YI converges to
YId exponentially. Solving (7) for ih gives
(8)
200
uses current and position measurements which
are denoted by
= (6 6 6 f = (x i l i2f ·
The following second order system describes the
reduced-order non linear observer:
The force data derived from the FEM model was
used in a 2-D Simulink lookup table to get an
accurate measure of coil force as a function of
airgap and current . The flux data from the FEM
model was inverted to get a 2-D lookup table for
current as a function of flux and airgap. This
table was used directly with (4) to simulate the
coil dynamics (i.e., flux linkage was taken as the
state in simulation). We take ko = 2.10 10 s-2 and
kl = 3 . 10 5 S-I and Kk = 105 V/A . The current
is limited to 40 A and the voltage to 2000 V.
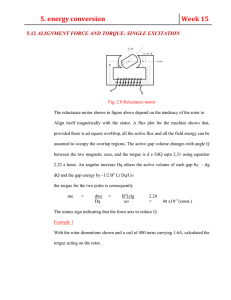
The Simulink simulation results are shown in
Figures 3-5. Figure 3 shows that the armature
reaches Coil 1 with a velocity and acceleration
close to zero. Figure 5 shows fast convergence
of the the velocity and disturbance estimates.
A nonzero steady-state disturbance estimate is
due to the difference between FEM data and the
lumped parameter model.
e
ZI
=+
(!
+C I ) ZI
/3~~
( (11:-6)2
+
Z2 -
(!
+C I )
/3~§
- (11:+6)2 -ks~1
)
CI~I
1
m +C2~1
Z2 = -G 2z 1 - CIC2~1'
where the observer gain G = (Cl C 2 )T is such
that the zero solution of the linear error dynamics
i~ expon~ntially stable, and where i = ± - i and
d = d - d. The state estimate is computed from z
using (i d)T = Z+G~I where G = (Cl C 2 )T and
Z = (ZI Z2)T . Estimated state feedback is used
in the simulations below, i.e., the desired currents
(9) and (10) are modified to include d and i .
Simulation Result
We consider the problem of opening the valve ,
i.e., moving the armature from x = -4 mm at
t = 0 s to 4 mm at tf = 4 ms . As discussed in
Section 2, it is critical that velocity at x = 4 mm
be below .1 m/so Meeting this specification while
using acceptable electrical input power depends
on an appropriate choice of the desired trajectory
YId. Choosing YId amounts to designing the openloop compensation. One choice for YId is to wait
until t = to which is the time for the armature
to reach it's closest position to Coil 1 with no
currents applied to either coil. At t = to the
armature has zero velocity and it is then steered to
rest at x( t f) = 4 mm. This choice of YId makes full
use of the energy stored in the spring to achieve
acceptable opening times. In order to keep openloop currents continuous, the third derivatives
of YId are interpolated at trajectory endpoints.
Hence, YId satisfies the interpolation conditions
YId (to) = 0,
y~~)(to) = X(k) (to),
Yld(tf) = 4 mm,
y~~) (t f) = 0,
Time (5)
Fig. 3. Armature position, velocity. Position and
velocity tracking error.
k = 0,2,3
k
= 1,2,3.
(12)
Since the coils are not active until to, the armature
position and its first, second, and third derivatives
can be computed from the uncontrolled motion
mx + B± + ksx = 0, x(O) = -4 mm, ±(O) = O.
The eight conditions (12) are met with the seventh
degree polynomial
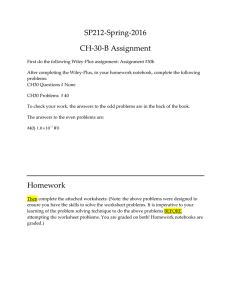
Time (5)
Fig. 4. Coil currents and voltages
7
Yld(t) = x(to)
+ L Ck(t -
5. CONCLUSION
to)k
(13)
k=4
The non linear uncertain dynamics of solenoid actuators and stringent performance requirements
where Ck are coefficients.
201
,([" Si: I
JI" ;&: :
3
3.2
3.4
3.6
3.8
4
3
3.2
3.4
3.6
3.8
4
:1
Time (5)
Fig. 5. Disturbance estimate, velocity estimate
error
make modeling and control of this device a challenging problem. In this paper an FEM model is
used to generate experimentally accurate static
force and flux data for a real prototype actuator.
A non linear flatness-based estimated state feedback control is derived from an ordinary differential equation model. The force and flux data of the
FEM model is coupled to the lumped parameter
model, and Simulink simulation results show low
impact velocities in the face of model uncertainty
disturbances.
Future work will concentrate on more accurate
lumped parameter models which include eddy
current and magnetic saturation effects. Also of
importance for improved robustness to parameter variation and sensor drift, is the development
of stability results for adaptive nonlinear voltage control coupled with velocity/disturbance observers. Further, investigation of open-loop trajectory planning which incorporates limits on voltage
and current would be useful. Finally, experimental
validation of the proposed control scheme will be
performed on a test bed which is under development.
6. ACKNOWLEDGMENTS
The authors wish to thank Kurt Maute and his
colleagues at Daimler-Chrysler for the donation
of the solenoid valve actuator and their technical
assistance.
REFERENCES
Barros da Cunha, S., J . Hedrick and A. Pisano
(2000) . Variable valve timing by means of a
hydraulic actuation. SAE 2000-01-1220.
Butzmann, S., J . Melbert and A. Koch (2000) .
Sensorless control of electromagnetic actuators for variable valve train . SAE 2000-011225.
202
Cristiani, M., D. Cannone and N. Moreelli (2002).
Electromagnetic actuator for the control of
the valves of an internal combustion engine.
US Pat. 6,427,650.
Fliess, M., J. Levine, P . Martin and P. Rouchon
(1995) . Flatness and defect of non-linear systems: Introductory theory and examples. Int.
J . Control 61(6), 1327- 1361.
Fliess, M., J. Levine, P. Martin and P. Rouchon
(1999) . A Lie-Backlund approach to equivalence and flatness of non linear systems. IEEE
Trans. Auto. Contr. 44(5), 922- 937.
Kawase, y '. , H. Kikuchi and S. Ito (1991). 3D nonlinear transient analysis of dynamic
behavior of th~.clapper type DC magnet.
IEEE Trans. Mag~tics. 27(5),4238-4241.
Koch, C.R. and H. M3ckel (2001). Verfahren
zur Regelung des Bewegungsverlaufs eines
Ankers. German Pat. Appl. 10010756 Al.
Konrad, R. (1998) . Verfahren zur Bewegungssteuerung fUr einen ankers eines elektromagnetishen Aktuators. German Pat. Appl.
19834548 Al.
Levine, Jean, Jacques Lottin and Jean-Christophe
Ponsart (1996). A nonlinear approach to the
control of magnetic bearings. IEEE Trans.
Contr. Syst. Technol. 4(5), 524-544.
Pischinger, F. and P. Kreuter (1984). Electromagnetically operating actuator. US Pat.
4,455,543.
Pischinger, M., W . Salber, F . van der Staay,
H. Baumgarten and H. Kemper (2000). Benefits of the electromechanical valve train in
vehicle operation. SAE 2000-01-1223.
Rassem, H. (2001) . Single-cylinder engine tests of
a motor-driven variable-valve actuator. SAE
2001-01-0241 .
Roschke, T. and M. Bielau (1995) . Verfahren
zur modellbasierten Messung und Regelung
von Bewegungen an elektromagnetischen Aktoren. German Pat. Appl. 19544207 Al .
Rossi, C. and A. Tonielli (2001). Method and device for estimating the position of an actuator
body in an electromagnetic actuator to control a valve of an engine. European Pat. Appl.
EP 1152129 Al.
Schmitz, G. (1995). Verfahren zur Regelung
der Ankerauftreffgeschwindigkeit an einen
elektromagnetischen Aktuator durch extrapolierende Abschatzung der Energieeinspeisung. German Pat. Appl. 19807875 Al.
Wang, Y., T. Megli, M. Haghgooie, K. Peterson
and A. Stefanopoulou (2002) . Modeling and
control of electromechanical valve actuator.
SAE 2002-01-1106.