DOCSIS 3.1 Time Protocol (DTP) Presentation
 Presentation")
DOCSIS 3.1
MAC SUBLAYER
DTP – DOCSIS Time Protocol
John Chapman
Fellow, CTO Cable BU
Cisco Corporation
DTP Introduction
What is DTP trying to achieve?
• Goal
– To provide precise frequency and time to an external system that is connected to the network port of a DOCSIS
CM.
– Running timing protocols over the top of DOCSIS adds timing error due to upstream scheduling jitter and asymmetrical delay.
– DTP allows conversion to and from other timing protocols.
• Application
– Wireless/cellular backhaul of pico, femto & macrocells over
DOCSIS.
– Any service requiring precision timing.
© 2014 CableLabs®. All rights reserved.
Time Protocols
A Brief History
© 2014 CableLabs®. All rights reserved.
Timing Protocols
A brief history
Name Standard
Time
Protocol
NTP v4
PTP v2
SyncE
RFC 868
1983
RFC 5905
1985-2010
IEEE 1588
2002-2008
G.8261
Typical
Accuracy
Signaling
Server - Client seconds Req time
Send time
1 – 100 ms Delay Req
Delay Rsp
1 – 100 us Sync
Delay Req
Delay Rsp
0 ppm delta ESMC
1 PPS Evolving Not a true protocol
(yet)
Comments
Used for ToD in DOCSIS
Extremely basic.
Depends upon network topology.
OTT system.
32/64/128 bit timestamp
Modifies nodes in networks to achieve precision.
64 bit timestamp.
Locked to source clock.
Initially HW only. SONET-like.
HW Pulse marks a describable event.
© 2014 CableLabs®. All rights reserved.
Synchronous Ethernet
A hardware centric design
Frequency Synchronization
Ethernet
Network
SONET/SDH
Network
Hybrid
OC-X
STM-X
Hybrid T1
EEC
Engineered
Timing Path
• Initially for frequency only.
– Follows a Stratum clock hierarchy.
• Extended with ESMC (Ethernet Synchronization Message Channel)
– SyncE/ESMC are intended to replace SONET/SSM
© 2014 CableLabs®. All rights reserved.
IEEE-1588 Precision Timing Protocol (PTP)
A software centric design with hardware support
• PTP is a message based SYNC and two-way time transfer (TWTT) protocol for synchronizing distributed nodes in time and frequency.
• PTP defines a hardware and software method for passing clocking through a network node.
– Timestamps are placed in an Ethernet packet and replaced or corrected as they pass through a node.
– If a network node can be made to look like a constant delay, and since the network link is usually constant delay, then the overall network can have predictable and precise timing coupled through it.
© 2014 CableLabs®. All rights reserved.
PTP Clock Types
Definitions for all network scenarios
• PTP defines various clock types
GM: Grandmaster Clock
BC: Boundary Clock
TC: Transparent Clock
OC: Ordinary Clock
GM is the ultimate source of time in a
PTP domain
Clocking is terminated (Slave) and regenerated (Master) at a network node.
Clocking passes through a network node and receives a correction factor.
End node clock
© 2014 CableLabs®. All rights reserved.
GPS
Frequency Synchronization
Time Synchronization sync & delay_resp
M
GM
Non-Participant
Nodes delay_req
GM : Grand Master
BC : Boundary Clock
OC : Ordinary Clock
TC : Transparent Clock
M : Master port
S : Slave port
M
S
BC
+ c orr
B+
A de lay
_re q
M syn c & de lay
_re sp S SyncE
OC sy nc
Non-Participant
Nodes de lay
_r eq dela y_re sp sync + corrA sync + corrA+B
TC TC
TC
TC TC
TC delay_req
+ corrB delay_req
S
OC
SyncE
DTP Network Protocol Support
DOCSIS 3.1 can interface with 1588 and SyncE
IEEE-1588 (PTP)
• CMTS/CM can be a Grandmaster Clock (GC)
– Frequency and time derived from CMTS. PTP originated in CM.
• CMTS/CM can be a Boundary Clock (BC)
– CMTS syncs to PTP. CM syncs to CMTS. BC is regenerated
•
CMTS/CM can be a Transparent Clock (TC)
– CMTS and CM update correction fields in PTP messages
Synchronous Ethernet
• CM derives Ethernet Frequency from OFDM Baud clock.
© 2014 CableLabs®. All rights reserved.
DTP
DOCSIS Time Protocol
IEEE-1588, SyncE, NTP and DOCSIS as an Integrated System
© 2014 CableLabs®. All rights reserved.
DTP Scope
CMTS
Clock
CM
Clock
DTP
IEEE-1588
SYNC-E
DTI
NTP
GPS
IEEE-1588
SYNC-E
NTP
• CMTS synchronizes DOCSIS to a network source.
• DTP adds support to DOCSIS to support protocol conversion.
• CM generates precision timing using DOCSIS timing to support network protocols
• DOCSIS latency and asymmetry are measured and compensated for by DTP.
© 2014 CableLabs®. All rights reserved.
Timestamp - The Concept of EPOCH
" PTP typically uses the same epoch as Unix time
(Midnight, 1 January 1970).
Whereas Unix time is based on Coordinated
Universal Time (UTC) and is subject to leap seconds, PTP is based on International Atomic
Time (TAI) and moves forward monotonically.
The PTP grandmaster communicates the current offset between UTC and TAI so that UTC can be computed from the received PTP time.”
- Wikipedia
• The first thing that is needed is a more accurate timestamp.
• EPOCH anchors a timestamp to time of day.
• DOCSIS 3.1:
– Uses a 64 bit timestamp
– Uses EPOCH of Midnight, 1 Jan 1970
– Uses TAI monotonic counting method
• This allows for easier conversion between D3.1 and IEEE-1588.
© 2014 CableLabs®. All rights reserved.
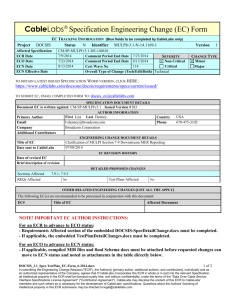
DOCSIS 3.1 Timestamp
D3.0 timestamp is contained in the D3.1 timestamp
8 bytes
23 bits 32 bits 5 bits 4 bits
÷ 20 ÷ 16
Epoch D3.0 Timestamp
112 years
Comparison
DOCSIS 3.0
DOCSIS 3.1
IEEE-1588
NTP
7 min
Size
32 bits
64 bits
64 bits
64 bits
97.66 ns
10.24 MHz
4.88 ns
204.8 MHz with roll-over
305 ps
204.8 MHz x 16
10.24 MHz x 320
Precision
97.6562 ns
305 ps
1 ns
232 ps
Max Time
7 min
112 years
584 years
136 years
© 2014 CableLabs®. All rights reserved.
True Ranging Offset
• DTP defines a True Ranging Offset (TRO)
• The TRO is the measured ranging offset of the CM between two defined reference points.
1. This value will be the same for all CMs
2. This value equals the round trip delay of the HFC plant.
• The TRO is measured at the CM between:
A. the time the first bit of a packet is transmitted in the upstream from the CM, and
B. the time the first bit of a packet is expected to arrive at the CMTS (MAP entry)
• Since the measurement is done when an upstream packet is transmitted, (after buffering), all upstream scheduling jitter is eliminated.
© 2014 CableLabs®. All rights reserved.
PTP and DTP
System View
CMTS
CMTS
Clock
CM
CM
Clock
PTP NSI/DTI
PHY
Buffering Switching Buffering
DOCSIS
PHY
DTP
HFC
Plant
DOCSIS
PHY
Buffering Switching Buffering
CMCI
PHY
Legend: green = fixed delay path blue = variable delay path
• IEEE-1588 (PTP) runs external to CMTS/CM
• DOCSIS DTP runs internal to CMTS/CM
• Timing is hardware coupled to the device edges
PTP
Slide 15
© 2014 CableLabs®. All rights reserved.
IEEE-1588 Syncing
The tricks of the trade
• All timing protocols use a variant of TWTT
– Two-Way Time Transfer
• A timestamp is sent from A to B
• Messaging is used to determine the network delay and asymmetry.
• Timestamp B is corrected to match timestamp
A.
• DTP has this information built into DOCSIS
Slide 16
© 2014 CableLabs®. All rights reserved.
DTP True Ranging Offset
TWTT is achieved by measuring the result of DOCSIS Ranging
• The TRO is the measured ranging offset of the CM between two defined reference points.
– TRO is a measured (or derived) value that is different than the actual implemented ranging offset a CM might use in its communication with the CMTS.
• The value of TRO is the equivalent to the round trip delay of the combined downstream and upstream propagation delays of the HFC plant, the
CMTS and CM PHY paths.
• Since the measurement is done between the downstream clock path and when an upstream packet is transmitted (after buffering), all jitter and delay from internal packet queues are eliminated from the measurement.
Slide 17
© 2014 CableLabs®. All rights reserved.
DTP Timing Model
Generic Model for CMTS, CM, and HFC Plant
DTP Calibration System
HFC Plant ts-cmts-in t-cmtsds-i
CMTS
CMTS
Clock t-cmtsds-o t-cmtsds-p t-hfcds-o t-hfcds-p t-cmds-o t-cmds-p
CM
CM
Clock t-cmds-i t-cmadj ts-cm-out t-tro t-cmtsus-o t-cmtsus-p t-hfcus-o t-hfcus-p t-cmus-o t-cmus-p
• The accuracy of the system depends upon the accuracy of the parameters in the model.
Slide 18
© 2014 CableLabs®. All rights reserved.
PTP
Timestamp
PTP
Timestamp
Sync &
Conversion
(t-cmts-ds-i = 0)
Sync &
Conversion
(t-cm-adj = 1800)
(t-cm-ds-i = 0)
2000
3800
CMTS
Clock
CMTS
PHY
CM
PHY
DOCSIS RANGING, DTP Signaling t-cmtsds-o t-cmtsds-p
500
SYNC
25 t-hfcds-p
750 t-hfcds-o
0 t-cmds-p
25 t-cmds-o
500
CM
Clock
200
2000
4000
5800
6100
7000
8800
500
MAP
(Tx=7000)
25
RNG
REQ
20 t-cmtsus-o
30 t-cm
-us-p
750
750 t-hfcus-p
0
50 t-hfcus-o
25
500
30 t-cmus-p
20 t-cmus-o
2200
4000
4300
5200
7000
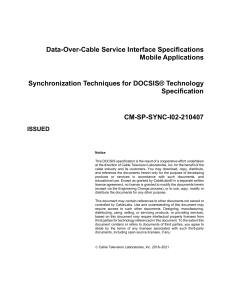
True Ranging Offset
(TRO) Example
TRO
Measured
Round Trip Delay
Between Reference Points measured transmit time
True
Ranging
Offset
MAP entry
7000
- 4300
======
2700
500
+ 25
+ 750
+ 25
+ 500
+ 50
+ 800
+ 50
====
=
✔ known
✔ characterized
? to be measured
✔ characterized
✔ known
✔ characterized
? to be measured
✔ characterized
2700
Offset needed = 2000 – 200 = 1800
© 2014 CableLabs®. All rights reserved.
PTP
Timestamp
Sync &
Conversion
PTP
Timestamp
Sync &
Conversion
CMTS
Timetamp
Reference
2000
CMTS
PHY
DOCSIS RANGING
500
T i
/2
25
T
DS-CMTS
SYNC
750
T
DS-HFC
3800
CM
PHY
25
T
DS-CM
500
T i
/2
CM
Timestamp
Reference
200
2000
4000
500
2200
25
MAP (Tx=7000)
750
25
5800
500
4000
6100
7000
50
T
US-CMTS
RNG REQ
800
T
US-HFC
50
T
DS-CM
4300
5200
8800 7000
Where:
- All values are in arbitrary time units for sake of example.
- Upstream HFC delay is set to slightly more than downstream HFC delay
- DOCSIS ranging process determines internal offset for upstream tx time.
Thus:
Round Trip Delay (calculated) = 500 + 25 + 750 + 25 + 500 + 50 + 800 + 50 = 2700
True Ranging Offset (measured) = 7000 – 4300 = 2700
Formula Results:
Actual Offset Needed: PTP Offset = 500 + 25 + 750 + 25 + 500 = 1800
Formula (1) approximation: PTP Offset = (2700
– 1000) / 2 + 1000 = 1850
Formula (9) with Tus-off = 0: PTP Offset = 1050 +(2700
– 1150) / 2 = 1825
Formula (9) with Tus-off = 50: PTP Offset = 1050 +(2700 – 1150 - 50) / 2 = 1800
True
Ranging
Offset
Calculating Latency
TRO = known delays + unknown delays
CMTS
CM
Total DS Latency
= 500+25+750+25+500 = 1800
HFC
Plant
2700 – (500+25+25+500+50+50) = 1550
DS HFC Plant Latency
= 1550 / 2 * (known plant asymmetry) = 750
Corrected CM Timestamp
= 7000 + 1800 = 8800
© 2014 CableLabs®. All rights reserved.
DTP Signaling
CMTS is DTP Master
• Used for generic CM with CMTS centric design. Larger scale.
• Note the extra INFO message. Unique.
Slide 21
© 2014 CableLabs®. All rights reserved.
DTP Signaling
CM is DTP Master
• Used for higher end CM centric designs
• CMTS can still override specific parameters
Slide 22
© 2014 CableLabs®. All rights reserved.
Multi-System
Designing across systems
Timing
Protocol
Source
T-source-skew
CMTS 1
HFC 1
CM 1 Timing Protocol
T-cmts-error T-hfc-error T-cm-error
T-cm-cm-skew
T-cmts-error T-hfc-error
HFC 2
CMTS 2
T-cm-error
CM 2 Timing Protocol
• 1588 timing needs consistency across systems.
• DTP defines five levels of performance between two systems.
Slide 23
© 2014 CableLabs®. All rights reserved.
DTP Recap
• CMTS synchronizes DOCSIS to a network source.
– DTI, IEEE-1588v2, etc
• DTP manages DOCSIS latency and asymmetry.
• CM generates precision timing using DOCSIS timing
• Accuracy is dependent upon accurate modeling of
CMTS, CM, and HFC plant.
– Target accuracy of better than a few μseconds
© 2014 CableLabs®. All rights reserved.
DTP Summary
It’s about time.
• The DOCSIS system is already based upon highly precise timing.
– DTP leverages this asset.
• Rather than run NTP or PTP over-thetop, the DOCSIS system can be modified to generate or correct these timing protocols with a very high degree of precision.
© 2014 CableLabs®. All rights reserved.