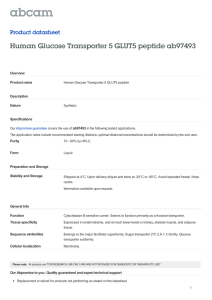
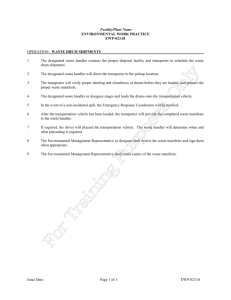
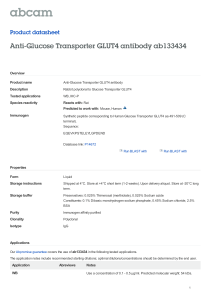
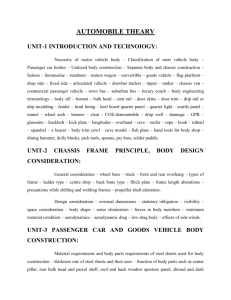
International Journal of Mechanical Engineering and Technology (IJMET) Volume 10, Issue 03, March 2019, pp. 290-297. Article ID: IJMET_10_03_030 Available online at http://www.iaeme.com/ijmet/issues.asp?JType=IJMET&VType=10&IType=3 ISSN Print: 0976-6340 and ISSN Online: 0976-6359 © IAEME Publication Scopus Indexed PRELIMINARY DESIGN OF A MULTI-TERRAIN TRANSPORTER H. Adarsha Mechanical Engineering, SET, Jain University, Kanakpura Road – 562112, Bangalore Sunil Bhat Mechanical Engineering, SET, Jain University, Kanakpura Road – 562112, Bangalore Adithya Kumar Mechanical Engineering, SET, Jain University, Kanakpura Road – 562112, Bangalore N.G. Subramanya Mechanical Engineering, SET, Jain University, Kanakpura Road – 562112, Bangalore V.L.Sagar Mechanical Engineering, SET, Jain University, Kanakpura Road – 562112, Bangalore ABSTRACT The transporters are required by the security forces for quick mobility to inhospitable terrains while protecting the borders. The paper presents a preliminary design of an all-electric multi-terrain transporter. The caterpillar design is adopted to develop the chassis. Softwares CATIA and ANSYS are used for modelling and analysis. Ratings of motors needed to drive the transporter are estimated. Microcontroller unit is used to control the drive system. Keywords: Chassis, Design, Micro-controller unit, Multi-terrain, Transporter, Variable frequency motor Cite this Article H. Adarsha, Sunil Bhat, Adithya Kumar, N.G. Subramanya and V.L.Sagar, Preliminary Design of A Multi-Terrain Transporter, International Journal of Mechanical Engineering and Technology, 10(3), 2019, pp. 290-297. http://www.iaeme.com/IJMET/issues.asp?JType=IJMET&VType=10&IType=3 1. INTRODUCTION Reliable and efficient transportation is the major requirement of defence forces in the present era, however travel in each and every mountainous region of the country becomes a tedious task due to varying topography. Countries like India have diverse geographical features that makes it difficult for the security forces to access and protect the borders with ease. Furthermore, the rough terrains hinder the movement of heavy artillery to the regions of high http://www.iaeme.com/IJMET/index.asp 290 editor@iaeme.com Preliminary Design of A Multi-Terrain Transporter sensitivity. Thus, the need for an alternate transport arises to facilitate quick and easier movements for providing better security to the country. Currently, the All-Terrain Vehicles used by the security forces are good methods of transportation but these vehicles are heavy and provide less accessibilities. Thus, better and swift vehicles with advanced features are required to increase maneuverability in all the hostile regions. The aim of this paper is to present the preliminary design of an all electric transporter built with capabilities of travelling in all terrains. The vehicle is light weight and is completely powered by AC motors to run at the speed of 25-30 km/hr with an acceleration of 5-6 m/s2. The chassis is modeled and designed using the software tool-CATIA while considering the size of four pole induction, high frequency motor with inverter controlled magnetic flux. Two motors of power of 25 HP each are installed. The structural worthiness of the chassis is checked with the help of finite element software - ANSYS. The caterpillar design of the chassis is adopted for better inclination support and easy movement of the transporter in rough terrains. With the calculated battery and motor specifications, a rough run time of 3.5 to 4 hours is expected at peak loads. The concept of variable frequency drive is introduced to allow to control the frequency of AC motor thereby letting to set the desired acceleration and speed of the vehicle. With the calculations performed, the vehicle is expected to run flawlessly on any terrain with gradient less than 400. 2. LITERATURE REVIEW The work published on transporters is mainly in the form of patents. The literature review is summarised as follows:A multi-terrain vertical lift transporter for lifting and transporting loads over various soil conditions and terrain is developed [1]. The lift transporter has a laterally adjustable wheel base to allow it to accommodate loads of varying widths. Further, the lift transporter does not require a counter-weight as the center of gravity of the load is substantially within the wheel base. A multi-terrain riding board [2] includes an elongated deck mounted on a chassis, front axle assembly pivotally coupled with the chassis and a pair of horizontal spindles that rotate about respective vertical axes. Other constructional features of the vehicle are:- A pair of wheels mounted for rotation about the spindles, a pair of tie rods connected between the chassis and the spindles to transfer tilting movement of the chassis into rotation of the spindles about the vertical axes, a rear axle coupled with the chassis and a rear wheel mounted on the rear axle. In one embodiment, the rear axle is fixedly connected to the chassis so that the rear wheel cambers in response to angulation of the deck. Horizontal tension springs are connected between the spindles and the bottom portion of the chassis to help stabilize the deck of the riding board. An engine or motor is mounted within the chassis between the front and rear axle assemblies. The deck is connected with the chassis to permit pivotal movement of the deck from a lowered position resting on the chassis to an elevated position thereby allowing access to the engine. A multi-purpose transporter [3] is developed that has a hollow container with at least one opening located on the upper surface. Other features are:- A pair of frame rails on either side of the hollow container with hand grips on one end and wheels on the other, a frame with support straps extending underneath the hollow container between the pair of handles and at least one opening on the rear of the container. The transporter is supported by the wheels and legs attached to the frame rails. When the transporter is tipped forward, the opening is supported above the ground by a forward support element, which includes a compartment with a lid. http://www.iaeme.com/IJMET/index.asp 291 editor@iaeme.com H. Adarsha, Sunil Bhat, Adithya Kumar, N.G. Subramanya and V.L.Sagar A personal transporter [4] is developed with improvements in motorized balancing. In one embodiment of the invention, a transporter for carrying the payload includes the following:- A platform for supporting the user, a ground-contacting module to which the platform is mounted and which propels the user, a proximity detector for determining the presence of a user, a safety switch coupled to the detector for inhibiting operation of the ground-contacting module unless the proximity detector has determined the presence of the user, a motorized drive arrangement coupled to the ground-contacting module for causing automatically balanced and stationary operation of the vehicle unless the proximity detector determines the presence of the user on the vehicle. Various other mechanisms are provided for receiving rider input in order to direct steering of the transporter. A device [5] is developed for transporting a human being over the ground having a surface that may be irregular and may even include stairs. Its features are:- A ground-contacting module movably attached to the support. The orientation of the ground-contacting module defines fore-aft with lateral planes intersecting one another at a vertical. The support and the ground-contacting module are components of an assembly. A motorized drive mounted to the assembly and coupled to the ground-contacting module causes locomotion of the assembly. Finally, the embodiment has a control loop in which the motorized drive is included for dynamically enhancing stability in the fore-aft plane by operation of the motorized drive in connection with the ground-contacting module. The ground contacting module is realized as a pair of ground-contacting members laterally disposed with respect to one another. The ground-contacting members are wheels. Alternatively, each ground-contacting member may include a cluster of wheels. A multi-wheel transporter vehicle [6] of the straddle-type comprising first, second, third and fourth vertically extending corner upright members is developed. Each corner upright further comprises a wheel assembly at the lower end and first drive means to control one or more of said wheel assemblies in either a normal or lateral direction. A longitudinally extending endless conveyor platform assembly includes second drive means for selectively defining a linear motion in the longitudinal direction for conveyor between said uprights. A wheeled transporter [7] attachable to a multi-ton cargo container for lifting and lowering said container and moving same over the land is developed. The transporter includes separate transporter units attachable to each end of the container for building a trailer unit. Each unit is structured to permit high wheel travel for improved operation over rough terrain. A multi-terrain amphibious vehicle [8] adapted for travel across surfaces of various type and attributes is developed. The vehicle includes a chassis assembly which extends in a longitudinal direction, a plurality of propulsion members rotatably coupled to the chassis assembly for propelling the vehicle across a given surface and a control mechanism for controlling the rotational velocities and phases of the propulsion members. A cart [9] is developed for one or two hikers to transport their backpacks. The cart has a single pneumatic tire mounted on a wheel with a double elongated aluminum tubular frame including support braces and rubber padded angular pack brackets enclosing the wheel. Easily adjustable and removable front and rear pairs of handles permit the hikers to direct, propel and balance the cart. The wheel is spring-mounted to the frame by means of double concentric steel tubes, the outer one containing a compression spring. A stretched nylon mesh covers the frame to keep pack straps from interfering with the wheel. An accurate mileage counter is mounted to the load angular bracket. The belt is connected to the hub of the wheel. It is observed from the literature survey that the results of the transporter capable of travelling in hostile terrains are not exclusively reported. Therefore, the aim of this paper is to present the preliminary design of a transporter built with capabilities of travelling in all terrains. http://www.iaeme.com/IJMET/index.asp 292 editor@iaeme.com Preliminary Design of A Multi-Terrain Transporter 3. DESIGN PROCESS 3a. Chassis The chassis forms the main structure of the transporter vehicle that is meant to sustain the loads. Refer Fig. 1 to Fig. 3. The chassis of the present vehicle is of tubular type that comprises the front, middle and rear units. Each unit is designed and modelled with the aid of solid modelling software-CATIA. The units are constructed of A36 steel that is available in different forms namely rectangular bar, square bar, circular rod, channels, angles and beams. Individual bars and rods are welded to make the chassis units. A36 has excellent weld properties with good ductility that allows it to bend more readily than other steels. Its yield strength is 250 MPa with high % elongation of 20. Refer Fig. 4 for assembled chassis with all the units. The caterpillar motion is ensured by units pivoted or connected by joints with each other to allow the upward lateral movements of the units without excessively stressing the chassis. Structural integrity of the assembled chassis is checked with the help of finite element (FE) analysis software-ANSYS. Refer Fig. 5 to Fig. 7. The number of elements and nodes in each part of the chassis are equal to 14876 and 51612 respectively. Linear tetrahedron elements are used in meshing. The modulus of elasticity and poisson’s ratio of 2x105 MPa and 0.3 respectively are used in the analysis. The static load of 250 kg is applied over the model. Acceleration and gradient loads are also entered in the software. All the connecting nodes are suitably constrained. The stresses at critical sections of each unit are found to be well within the limits. 3b. Rating of propulsion motors The preliminary design calculations of the motor for the vehicle weight (including payload) of 250 kg and maximum velocity of 30 km/h are consolidated as follows:i) Rolling resistance = Weight * Co-efficient of rolling friction Rolling resistance = 250 * 9.81 *0.025= 61.3 N ii) The Gradient resistance (GR) for different angles of terrain inclination is obtained as For ɸ= 0 GR = 250 * 9.81 *sin(0) = 0 For ɸ= 20o GR= 250 * 9.81 *sin(20) = 838.8 N For ɸ= 400 GR= 250 * 9.81 *sin(40) = 1576.4 N iii) Acceleration Force = m*a m= 250 kg http://www.iaeme.com/IJMET/index.asp 293 editor@iaeme.com H. Adarsha, Sunil Bhat, Adithya Kumar, N.G. Subramanya and V.L.Sagar Figure. 1 Front unit Figure. 2 Middle unit Figure. 3 Rear unit Figure. 4 Assembled chassis http://www.iaeme.com/IJMET/index.asp 294 editor@iaeme.com Preliminary Design of A Multi-Terrain Transporter Figure. 5 FE model of front unit Figure. 6 FE model of middle unit Figure. 7 FE model of rear unit Considering the acceleration, a, of 6 m/s2 Accelerating Force = 250 x 6 = 1500 N iv) Total tractive effort (TTE) TTE = Rolling Resistance + Gradient Resistance + Accelerating Force For ɸ=00 , TTE = 61.3 + 0 + 1500 =1561.3 N For ɸ=200 , TTE =2400 N For ɸ=400, TTE = 3137.7 N v) Maximum torque required on the Drive Wheel of 15 cm radius (RWheel) Torque = Maximum TTE * RWheel = 3137.7 *15* 10-2 = 470.6Nm vi) Power Maximum speed of vehicle = 30km/hr Rotation per second (RPS) of wheels = (30*1000/3600)/(3.143*2*15*10-2) = 8.8 Total power required (HP) to propel the vehicle = 2*3.143*Torque*RPS/746=34.8 Power of each motor = 34.8 /2 =17.4 HP. http://www.iaeme.com/IJMET/index.asp 295 editor@iaeme.com H. Adarsha, Sunil Bhat, Adithya Kumar, N.G. Subramanya and V.L.Sagar Two motors, each of 25 HP rating, are selected 3. B.1. Variable frequency motors and battery pack YVF series, variable frequency and adjustable-speed converter three phase fed induction motor is used to drive the vehicle. It is the kind of a special AC motor which is controlled by frequency converter thus enabling energy saving and facilitating automatic control of the motors. YVF series motors are fitted with ventilation fans which provide better cooling effect to ensure motors running at various speeds without failure. For convenience of users, dimensions and rated output of YVF series electric motors are same as those of Y series electric motors in conformity with IEC. YVF series motors are widely used in light industries, metallurgical industries, textile industries, chemical industries, machine tool industries etc. While fitted with a sensor, these motors can achieve highly accurate operation of closed loop nature. To allow a run time of 4-5 hrs at peak load, 3000 Ah lithium ion 6 celled batteries are used as the power source. 3c. Microcontroller unit Refer Fig. 8. A micro-controller unit (MCU) is used to control the supply of power to the motors. It is a small computer based on a single integrated circuit. In modern terminology, it is similar to but less sophisticated than a system on a chip or SoC. The microcontroller contains one or more CPUs (processor cores) along with memory and programmable input/output peripherals. It controls flow of current to the motors depending upon the signal from the driver. The analog signal from the driver is converted to digital type by Analog to Digital converter. Inverter changes the form of current form DC to AC for the motors to run. Figure. 8 Micro-controller unit 4. RESULTS AND DISCUSSION The caterpillar design is considered for better inclination support and easy movement of vehicle in rough terrains. With the specifications of battery and motor, a run time of 3.5 to 4 hrs of the vehicle is expected. Also the concept of variable frequency drive is introduced to control the frequency of AC motor thereby letting to set different accelerating speeds of the vehicle. A micro-controller unit (MCU) is used to control the supply of power to the motors. With the calculations performed, the vehicle is expected to run flawlessly in any terrain at gradient less that 40 deg. The design of the vehicle chassis is initiated keeping the caterpillar structure as reference. In the design, the vehicle is considered to run at a speed of 25-30 km/hr with acceleration of 5-6 m/s2. Chassis is designed using the software tool CATIA. Structural worthiness of the http://www.iaeme.com/IJMET/index.asp 296 editor@iaeme.com Preliminary Design of A Multi-Terrain Transporter chassis is checked with finite element software ANSYS. The stress levels are well within the limits. Two variable frequency induction electric motors each of 25 HP power are used to drive the vehicle. The power is directly transmitted to wheels making front wheel drive for the left half of the vehicle and other motor powering the rear wheel drive thus making the middle axle a dummy one. To allow a run time of 4-5 hrs at peak load, 3000 Ah lithium ion 6 celled batteries are considered. A micro controller unit is used to control the power input to the motors. The final transporter is shown in Fig. 9. 5. CONCLUSIONS A preliminary design of an all electric multi-terrain transporter is presented. The chassis is of tubular type and is made of A36 steel. Each unit is designed by software-CATIA. Three Figure. 9 Complete transporter Separate units are assembled together to make the chassis. Structural integrity and worthiness of the chassis is checked by finite element software-Ansys. The vehicle is driven by two variable frequency induction motors, each motor having the rating of 25HP. A micro controller unit is used to control the power input to the motors. Battery pack of 3000 Ah lithium ion 6 supplies the power to the motors. REFERENCES [1] [2] [3] [4] [5] [6] [7] [8] [9] Multi - terrain vertical lift transporter, H Sexsmith - US Patent 6,343,674, 2002 Multi-terrain riding board, AJ Ondrish Jr - US Patent 5,950,754, 1999 Multi-purpose transporter, S Sanskrit - US Patent 6,634,659, 003, 2002 Personal transporter, DL Kamen, RW Arling, JD Field, JB Morrell - US Patent 2004 Human transporter, DL Kamen, RR Ambrogi, RJ Duggan - US Patent 5701965A, 1997 Multi-wheeled transporter and conveying vehicle, MJ Moore, CF Studley Jr - US Patent 4,372,725, 1983 Cargo container transporter, E Concha, M Jaffe, R Bedford - US Patent 4,297,068, 1981 Multi-terrain amphibious vehicle, WB Harvey - US Patent 5,881,831, 1999 Rough terrain cart, DM Barrus - US Patent 4,444,405, 1984 http://www.iaeme.com/IJMET/index.asp 297 editor@iaeme.com