BEE2123
ELECTRICAL MACHINES
Mohd Rusllim Mohamed
Ext : 2080
Mohd Rusllim Mohamed
Upon completion of the chapter the student
should be able to:
◦ State the principle by which machines
convert mechanical energy to electrical
energy.
◦ Understand the principle of DC generator
as it represents a logical behavior of dc
motors.
◦ Discuss the operating differences between
different types of dc motors
Mohd Rusllim Mohamed
Direct-current generators
are not as common as they
used to be, because direct
current, when required, is
mainly produced by
electronic rectifiers. These
rectifiers can convert the
current of an ac system
into direct current without
using any moving parts as
shown in Fig. 2.1.
Yet, still the DC generator
is used in many plants to
produce power needed to
operate large dc motor.
Generator Motor
Fig 2.1 Full wave rectifier
Mohd Rusllim Mohamed
A generator is a machine
that converts mechanical
energy into electrical
energy by using the
principle of magnetic
induction (Fig. 2.2)
In this example, the ends
of the wire loop have been
connected to two sliprings
mounted on the shaft,
while brushes are used to
carry the current from the
loop to the outside of the
circuit. (Details will be
discussed later)
Fig 2.2 Principle of magnetic induction in DC machine
Mohd Rusllim Mohamed
Recap : Whenever a conductor is moved within a
magnetic field in such a way that the conductor
cuts across magnetic lines of flux, voltage is
generated in the conductor.
The AMOUNT of voltage generated depends on:
i. the strength of the magnetic field,
ii. the angle at which the conductor cuts the
magnetic field,
iii. the speed at which the conductor is moved, and
iv. the length of the conductor within the magnetic
field
Mohd Rusllim Mohamed
The POLARITY of the voltage
depends on the direction of
the magnetic lines of flux and
the direction of movement of
the conductor.
To determine the direction of
current in a given situation, the
LEFT-HAND RULE FOR
GENERATORS is used as shown
in Fig. 2.3.
•thumb in the direction the conductor is being moved
•forefinger in the direction of magnetic flux (from north to south)
•middle finger will then point in the direction of current flow in an
external circuit to which the voltage is applied
Fig 2.3 Left Hand Rules
Mohd Rusllim Mohamed
The
simplest
elementary
generator that can be built is an
ac generator. Basic generating
principles
are
most
easily
explained through the use of the
elementary ac generator. For this
reason, the ac generator will be
discussed first. The dc generator
will be discussed later.
An elementary generator (Fig. 2.4)
consists of a wire loop mounted on the
shaft, so that it can be rotated in a
stationary magnetic field. This will
produce an induced emf in the loop.
Sliding contacts (brushes) connect the
loop to an external circuit load in
order to pick up or use the induced
emf.
Fig 2.4 Elementary Generator
Mohd Rusllim Mohamed
The pole pieces (marked N and S) provide the magnetic
field. The pole pieces are shaped and positioned as shown
to concentrate the magnetic field as close as possible to
the wire loop.
The loop of wire that rotates through the field is called the
ARMATURE. The ends of the armature loop are connected
to rings called SLIP RINGS. They rotate with the armature.
The brushes, usually made of carbon, with wires attached
to them, ride against the rings. The generated voltage
appears across these brushes. (These brushes transfer
power from the battery to the commutator as the motor
spins – discussed later in dc elementary generator).
Mohd Rusllim Mohamed
In Fig. 2.5, the armature
winding has been left out so
that it is easier to see the
rotor action. The key thing to
notice is that as the armature
passes through the horizontal
position, the poles of the
electromagnet flip. Because
of the flip, the north pole of
the electromagnet is always
above the axle so it can repel
the field magnet's north pole
and attract the field magnet's
south pole.
It's this magnetic attraction
and repulsion that causes the
armature to rotate
Armature winding
has been left out
N
s
Fig. 2.5 Rotor being rotated
Mohd Rusllim Mohamed
In Figure 2.6, an end view of the
shaft and wire loop is shown. At
this particular instant, the loop
of wire (the black and white
conductors of the loop) is
parallel to the magnetic lines of
flux, and no cutting action is
taking place. Since the lines of
flux are not being cut by the
loop, no emf is induced in the
conductors, and the meter at
this position indicates zero.
This position is called the
NEUTRAL PLANE.
Fig. 2.6 00 Position (Neutral Plane)
Mohd Rusllim Mohamed
In Figure 2.7, the shaft has been
turned 900 clockwise, the conductors
cut through more and more lines of
flux, and voltage is induced in the
conductor.
at a continually increasing angle , the
induced emf in the conductors builds
up from zero to a maximum value or
peak value.
Observe that from 00 to 900, the
black conductor cuts DOWN through
the field. At the same time the white
conductor cuts UP through the field.
The induced emfs in the conductors
are series-adding. This means the
resultant voltage across the brushes
(the terminal voltage) is the sum of
the two induced voltages. The meter
at position B reads maximum value.
Fig. 2.7 900 Position
Mohd Rusllim Mohamed
After another 900 of rotation (Fig.
2.8), the loop has completed 1800
of rotation and is again parallel to
the lines of flux. As the loop was
turned, the voltage decreased
until it again reached zero.
Note that : From 00 to 1800 the
conductors of the armature loop
have been moving in the same
direction through the magnetic
field. Therefore, the polarity of the
induced voltage has remained the
same
Fig. 2.8 1800 Position
Mohd Rusllim Mohamed
As the loop continues to turn, the
conductors again cut the lines of
magnetic flux (Fig. 2.9).
This time, however, the conductor
that previously cut through the flux
lines of the south magnetic field is
cutting the lines of the north
magnetic field, and vice-versa.
Since the conductors are cutting
the flux lines of opposite magnetic
polarity, the polarity of the induced
voltage reverses. After 270' of
rotation, the loop has rotated to
the position shown, and the
maximum terminal voltage will be
the same as it was from A to C
except that the polarity is reversed.
Fig. 2.9 2700 Position
Mohd Rusllim Mohamed
After another 900 of rotation,
the loop has completed one
rotation of 3600 and
returned to its starting
position (Fig. 2.10).
The voltage decreased from
its negative peak back to
zero.
Notice that the voltage
produced in the armature is
an alternating polarity. The
voltage produced in all
rotating armatures is
alternating voltage.
Fig. 2.10 3600 Position
Mohd Rusllim Mohamed
Observes
◦
The meter
direction the
conductors of the
armature loop
Direction of the
◦
current flow
◦
◦
Fig. 2.11 Output voltage of an elementary generator during one revolution
Mohd Rusllim Mohamed
Since DC generators must produce DC
current instead of AC current, a device
must be used to change the AC
voltage produced in the armature
windings into DC voltage. This job is
performed by the commutator.
The commutator is constructed from a
copper ring split into segments with
insulating material between the
segments (See next page). Brushes
riding against the commutator
segments carry the power to the
outside circuit.
The commutator in a dc generator
replaces the slip rings of the ac
generator. This is the main difference
in their construction. The commutator
mechanically reverses the armature
loop connections to the external
circuit.
Fig. 2.12 Commutator
Mohd Rusllim Mohamed
The armature has an axle, and
the commutator is attached to
the axle. In the diagram to the
right, you can see three
different views of the same
armature: front, side and endon.
In the end-on view, the winding
is eliminated to make the
commutator more obvious. You
can see that the commutator is
simply a pair of plates attached
to the axle. These plates provide
the two connections for the coil
of the electromagnet.
Fig 2.13 Armature with commutator view
Mohd Rusllim Mohamed
The diagram at the right shows how the
commutator and brushes work together
to let current flow to the electromagnet,
and also to flip the direction that the
electrons are flowing at just the right
moment. The contacts of the
commutator are attached to the axle of
the electromagnet, so they spin with the
magnet. The brushes are just two pieces
of springy metal or carbon that make
contact with the contacts of the
commutator.
Through this process the commutator
changes the generated ac voltage to a
pulsating dc voltage which also known as
commutation process.
Fig 2.14 Brushes and commutator
Mohd Rusllim Mohamed
The loop is parallel to
the magnetic lines of
flux, and no voltage
is induced in the loop
Note that the brushes
make contact with
both of the
commutator
segments at this
time. The position is
called neutral plane.
Fig. 2.15 00 Position (DC Neutral Plane)
Mohd Rusllim Mohamed
As the loop rotates, the
conductors begin to cut
through the magnetic lines of
flux.
The conductor cutting
through the south magnetic
field is connected to the
positive brush, and the
conductor cutting through
the north magnetic field is
connected to the negative
brush (Fig 2.16).
Since the loop is cutting lines
of flux, a voltage is induced
into the loop. After 900 of
rotation, the voltage reaches
its most positive point.
Fig. 2.16 900 Position (DC)
Mohd Rusllim Mohamed
As the loop continues to
rotate, the voltage
decreases to zero.
After 1800 of rotation, the
conductors are again
parallel to the lines of
flux, and no voltage is
induced in the loop.
Note that the brushes
again make contact with
both segments of the
commutator at the time
when there is no induced
voltage in the conductors
(Fig 2.17).
Fig. 2.17 1800 Position (DC)
Mohd Rusllim Mohamed
During the next 900 of rotation, the
conductors again cut through the
magnetic lines of flux.
This time, however, the conductor that
previously cut through the south
magnetic field is now cutting the flux
lines of the north field, and vice-versa.
(Fig 2.18).
Since these conductors are cutting the
lines of flux of opposite magnetic
polarities, the polarity of induced
voltage is different for each of the
conductors. The commutator, however,
maintains the correct polarity to each
brush.
The conductor cutting through the north
magnetic field will always be connected
to the negative brush, and the
conductor cutting through the south
field will always be connected to the
positive brush.
Since the polarity at the brushes has
remained constant, the voltage will
increase to its peak value in the same
direction.
Fig. 2.18 2700 Position (DC)
Mohd Rusllim Mohamed
As the loop continues to rotate (Fig
2.19), the induced voltage again
decreases to zero when the
conductors become parallel to the
magnetic lines of flux.
Notice that during this 3600
rotation of the loop the polarity of
voltage remained the same for
both halves of the waveform. This
is called rectified DC voltage.
The voltage is pulsating. It does
turn on and off, but it never
reverses polarity. Since the polarity
for each brush remains constant,
the output voltage is DC.
Fig. 2.19 00 Position (DC Neutral Plane)
Mohd Rusllim Mohamed
Observes
◦ The meter
◦ direction the
conductors of the
armature loop
◦ Direction of the
current flow
Fig. 2.20 Effects of commutation
http://www.sciencejoywagon.com/physicszone/lesson/otherpub/wfendt/generatorengl.htm
Mohd Rusllim Mohamed
To increase the amount of
output voltage, it is common
practice to increase the number
of turns of wire for each loop
(Fig 2.20).
If a loop contains 20 turns of
wire, the induced voltage will be
20 times greater than that for a
single-loop conductor.
The reason for this is that each
loop is connected in series with
the other loops. Since the loops
form a series path, the voltage
induced in the loops will add.
In this example, if each loop has
an induced voltage of 2V, the
total voltage for this winding
would be 40V
(2V x 20
loops = 40 V).
Fig. 2.21 Effects of additional turns
Mohd Rusllim Mohamed
When more than one loop is used, the
average output voltage is higher and
there is less pulsation of the rectified
voltage.
Since there are four segments in the
commutator, a new segment passes each
brush every 900 instead of every 1800.
Since there are now four commutator
segments in the commutator and only
two brushes, the voltage cannot fall any
lower than at point A.
Therefore, the ripple is limited to the rise
and fall between points A and B on the
graph. By adding more armature coils, the
ripple effect can be further reduced.
Decreasing ripple in this way increases
the effective voltage of the output.
Fig. 2.22 Effects of additional coils
Mohd Rusllim Mohamed
Q.1Generators convert mechanical motion to electrical energy using what
principle?
Q.2 What rule should you use to determine the direction of induced emf in a coil?
Q.3 What is the purpose of the slip rings?
Q.4 Why is no emf induced in a rotating coil when it passes through the neutral
plane?
Q.5 What component causes a generator to produce dc voltage rather than ac
voltage at its output terminals?
Q.6 At what point should brush contact change from one commutator segment
to the next?
Q.7 An elementary, single coil, dc generator will have an output voltage with how
many pulsations per revolution?
Q.8 How many commutator segments are required in a two-coil generator?
Mohd Rusllim Mohamed
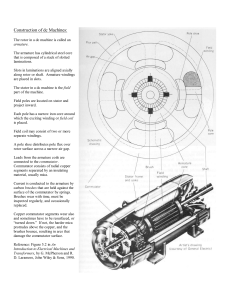
The actual construction and operation of
a practical dc generator differs somewhat
from our elementary generators
Nearly all practical generators use
electromagnetic poles instead of the
permanent magnets used in our
elementary generator
The main advantages of using
electromagnetic poles are:
(1) increased field strength and
(2) possible to control the strength of the
fields. By varying the input voltage, the
field strength is varied. By varying the
field strength, the output voltage of the
generator can be controlled.
Fig. 2.23 Four-pole generator (without armature)
Mohd Rusllim Mohamed
If you ever have the chance to take apart a small electric motor, you
will find that it contains the same pieces described above: two small
permanent magnets, a commutator, two brushes, and an
electromagnet made by winding wire around a piece of metal. Almost
always, however, the rotor will have three poles rather than the two
poles as shown in this article. There are two good reasons for a motor
to have three poles:
◦ It causes the motor to have better dynamics. In a two-pole motor, if the
electromagnet is at the balance point, perfectly horizontal between the two
poles of the field magnet when the motor starts, you can imagine the
armature getting "stuck" there. That never happens in a three-pole motor.
◦ Each time the commutator hits the point where it flips the field in a twopole motor, the commutator shorts out the battery (directly connects the
positive and negative terminals) for a moment. This shorting wastes energy
and drains the battery needlessly. A three-pole motor solves this problem
as well.
It is possible to have any number of poles, depending on the size of
the motor and the specific application it is being used in.
Mohd Rusllim Mohamed
More loops of wire = higher rectified voltage
In practical, loops are generally placed in slots of an iron core (Fig
2.24)
The iron acts as a magnetic conductor by providing a low-reluctance
path for magnetic lines of flux to increase the inductance of the loops
and provide a higher induced voltage. The commutator is connected to
the slotted iron core. The entire assembly of iron core, commutator,
and windings is called the armature (Fig 2.25). The windings of
armatures are connected in different ways depending on the
requirements of the machine.
Fig. 2.25 DC machine armature
Fig. 2.24 loops of wire are wound around slot in a metal core
Mohd Rusllim Mohamed
Lap Wound Armatures
◦ are used in machines designed for low
voltage and high current
◦ armatures are constructed with large
wire because of high current
◦ Eg: - are used is in the starter motor of
almost all automobiles
◦ The windings of a lap wound armature
are connected in parallel (Fig 2.26). This
permits the current capacity of each
winding to be added and provides a
higher operating current
◦ No of current path, C=2p ; p=no of
poles
Mohd Rusllim Mohamed
Fig. 2.26 Lap wound armatures
Wave Wound Armatures
◦ are used in machines designed for high
voltage and low current
◦ their windings connected in series (Fig
2.27)
◦ When the windings are connected in
series, the voltage of each winding adds,
but the current capacity remains the
same
◦ are used is in the small generator in
hand-cranked megohmmeters
◦ No of current path, C=2
Fig. 2.27 Wave wound armatures
Mohd Rusllim Mohamed
Frogleg Wound Armatures
◦ the most used in practical nowadays
◦ designed for use with moderate current
and moderate armatures voltage
◦ the windings are connected in series
parallel (Fig2.28).
◦ Most large DC machines use frogleg
wound armatures.
Fig. 2.28 Frogleg wound armatures
Mohd Rusllim Mohamed
Mohd Rusllim Mohamed
Most DC machines use wound electromagnets
to provide the magnetic field.
Two types of field windings are used :
◦ series field, and
◦ the shunt field.
Mohd Rusllim Mohamed
Series field windings
◦ are so named because they are connected in series with the
armature
◦ are made with relatively few windings turns of very large wire
and have a very low resistance
◦ usually found in large horsepower machines wound with
square or rectangular wire. The use of square wire permits the
windings to be laid closer together, which increases the
number of turns that can be wound in a particular space (Fig
2.29)
◦ Square and rectangular wire can also be made physically
smaller than round wire and still contain the same surface area
(Fig 2.30)
Fig. 2.29 square wire permits more turns than round wire in the same area
Fig. 2.30 Square wire contains more
surface than round wire
Shunt field windings
◦ is constructed with relatively many turns of small
wire, thus, it has a much higher resistance than the
series field.
◦ is intended to be connected in parallel with, or
shunt, the armature.
◦ high resistance is used to limit current flow through
the field.
Mohd Rusllim Mohamed
When a DC machine
uses both series and
shunt fields, each pole
piece will contain both
windings (Fig 2.31).
The windings are
wound on the pole
pieces in such a
manner that when
current flows through
the winding it will
produce alternate
magnetic polarities.
Fig. 2.31 Both series and shunt field windings are contained in each pole piece
S – series field
F – shunt field
Mohd Rusllim Mohamed
Winding
armature
field
Self excited
Wave
C=2
Lap
C=2p
Separately
Excited
Frogleg
series
shunt
compound
Mohd Rusllim Mohamed
Electric
motors
are
everywhere! In a house,
almost
every
mechanical
movement that you see
around you is caused by an
DC (direct current) electric
motor.
An electric motor is a device
that
transforms
electrical
energy
into
mechanical
energy by using the motor
effect.
Mohd Rusllim Mohamed
DC motors consist of rotor-mounted
windings (armature) and stationary
windings (field poles). In all DC motors,
except permanent magnet motors,
current must be conducted to the
armature windings by passing current
through carbon brushes that slide over a
set of copper surfaces called a
commutator, which is mounted on the
rotor.
Parts of an electric motor
The commutator bars are soldered to armature coils. The
brush/commutator combination makes a sliding switch that energizes
particular portions of the armature, based on the position of the rotor.
This process creates north and south magnetic poles on the rotor that
are attracted to or repelled by north and south poles on the stator, which
are formed by passing direct current through the field windings. It's this
magnetic attraction and repulsion that causes the rotor to rotate.
Mohd Rusllim Mohamed
The greatest advantage of DC motors may be speed
control. Since speed is directly proportional to
armature voltage and inversely proportional to the
magnetic flux produced by the poles, adjusting the
armature voltage and/or the field current will change
the rotor speed.
Today, adjustable frequency drives can provide
precise speed control for AC motors, but they do so
at the expense of power quality, as the solid-state
switching devices in the drives produce a rich
harmonic spectrum. The DC motor has no adverse
effects on power quality.
Mohd Rusllim Mohamed
Power supply, initial cost, and maintenance
requirements are the negatives associated with DC
motors
Rectification must be provided for any DC motors
supplied from the grid. It can also cause power
quality problems.
The construction of a DC motor is considerably more
complicated and expensive than that of an AC motor,
primarily due to the commutator, brushes, and
armature windings. An induction motor requires no
commutator or brushes, and most use cast squirrelcage rotor bars instead of true windings — two huge
simplifications.
Mohd Rusllim Mohamed
Series motors connect the
field windings in series with
the armature.
Series motors lack good
speed regulation, but are
well-suited for high-torque
loads like power tools and
automobile starters because
of
their
high
torque
production and compact size.
Ra
ia
M
Rf
Ea
VT (dc
supply)
VT Ea ia ( Ra R f )
note : ia iL
Ea K1K 2 I a K
Mohd Rusllim Mohamed
Pcf=ia2Rf
Pin= VTiL
P
Pm
Pca=ia2Ra
P is normally given
Pin = Pout + total losses
Where,
Pca =armature copper loss
Pcf =field copper loss
P=stray, mech etc
Pm= Ea ia
Pout
60 P
2
N
60 Po
for output / load torque , o
2 N
60 Pm
for mechanical torque, m
2
N
P
Efficiency , out
Pin
Mohd Rusllim Mohamed
Example 1:
A dc machine in Figure 1 is
consumed a 6.5kW when the
12.5 A of armature current is
passing thru the armature and
field resistance of 3.3 and 2.0
respectively. Assume stray
losses of 1.2kW. Calculate
a) terminal voltage, VT
b) back emf, Ea
c) net torque if the speed is at
3560rpm
d) efficiency of the machine
[520V, 453.75V, 12N-m, 68.8%]
M
Rf
Ra
ia
Ea
VT (dc
supply)
Figure 1
Mohd Rusllim Mohamed
Pin 6.5kW , I a 12.5 A,
Ra 3.3, R f 2.0,
P 1.2kW
a ). Pin VT I L
60 Po
2 N
Po Pm P , Pm Ea I a
c). o
sin ce, I L I a
Pm 453.73(12.5) 5672W
Pin 6.5k
VT
520V
I L 12.5
Po 5672 1.2k 4472W
b). Ea VT I a ( Ra R f )
520 12.5(3.3 2.0)
453.75V
60(4472)
o
12 Nm
2 (3560)
d ). %
Po
100%
Pin
4472
100%
6.5k
68.8%
Abu Zaharin Ahmad
Example 2:
A 600V 150-hp dc machine in
Figure 2 operates at its full rated
load at 600 rpm. The armature and
field resistance are 0.12 and
0.04 respectively. The machine
draws 200A at full load. Assume
stray losses 1700W. Determine
a) the armature back emf at full load,
Ea
b) developed power and developed
torque
c) assume that a change in load
results in the line current dropping
to 150A. Find the new speed in rpm
and new developed torque. {Hint:
Ea=K}
M
Rf
Ra
ia
Ea
VT (dc
supply)
Figure 2
[Ea=568V, P=113.6kW, T=1808Nm, n=608.45rpm, T=1017Nm]
Mohd Rusllim Mohamed
VT 600V , I a 200 A,
Ra 0.12, R f 0.04,
P 1700W , n 600rpm
a). Ea VT I a ( Ra R f )
600 200(0.12 0.04)
568V
60 Pm
b). m
2 N
Pm Ea I a 568(200) 113.6kW
60(113.6k )
o
1808 Nm
2 (600)
c).
Ea 2
K 2
Ea1
K 1
Since K is cons tan t
Ea 2
Ea 2
2
1 or n2
n1
Ea1
Ea1
Ea 2 600 150(0.12 0.04)
576V
576
n2
600 608.5rpm
568
m Ea 2 I a 2 576(150)
86.4 Nm
Abu Zaharin Ahmad
Shunt motors use highresistance field windings
connected in parallel with
the armature.
Varying the field resistance
changes the motor speed.
Shunt motors are prone to
armature
reaction,
a
distortion and weakening of
the flux generated by the
poles
that
results
in
commutation
problems
evidenced by sparking at the
brushes.
Installing additional poles,
called interpoles, on the
stator between the main
poles wired in series with the
armature reduces armature
reaction.
ia
iL
Ra
if
M
Ea
Rf
VT (dc
supply)
VT Ea ia ( Ra )
note : iL ia i f
VT i f R f
Mohd Rusllim Mohamed
Pcf=if2Rf
Pin=VTiL
P
Pm
Pca=ia2Ra
P is normally given
Pin = Pout + total losses
Where,
Pca =armature copper loss
Pcf =field copper loss
P=stray, mech etc
Pm= Ea ia
Pout
60 P
2
N
60 Po
for output / load torque , o
2
N
60 Pm
for mechanical torque, m
2
N
P
Efficiency , out
Pin
Mohd Rusllim Mohamed
Example :
◦ A voltage of 230V is applied to armature of a
machines in Fig 3 results in a full load armature
currents of 205A. Assume that armature resistance
is 0.2. Find the back emf, net power and torque by
assuming the rotational losses are 1445W at full
load speed of 1750rpm.
[189V, 37.3kW, 203.5Nm]
Mohd Rusllim Mohamed
VT 230V , I a 205 A,
Ra 0.2, P 1445W , n 1750rpm
a). Ea VT I a Ra
230 205(0.2)
189V
60 Po
c). o
2 N
60(37.3k )
o
203.5 Nm
2 (1750)
b) Po Pm P , Pm Ea I a
Pm 189(205) 38.745kW
Po 38.745k 1445 37.3kW
Abu Zaharin Ahmad
the concept of the
series and shunt
designs are
combined.
ia
Ra
Rf2
iL
if
M
Ea
VT Ea ia ( Ra R f 2 )
Rf1
VT (dc
supply)
note : iL ia i f
VT i f R f 1
Mohd Rusllim Mohamed
Pca=ia2Ra
Pcf2=ia2Rf2
Pin=VTiL
Pm
P
Pout
Pcf1=if2Rf1
60 P
P is normally given
Pin = Pout + total losses
Where,
Pca =armature copper loss
Pcf =field copper loss
P=stray, mech etc
Pm= Ea ia
2
N
60 Po
for output / load torque , o
2
N
60 Pm
for mechanical torque, m
2
N
P
Efficiency , out
Pin
Mohd Rusllim Mohamed
There is no direct connection between the
armature and field winding resistance
DC field current is supplied by an
independent source
◦ (such as battery or another generator or prime
mover called an exciter)
Circuit analysis:
2 pnZ
Ea
K f if n K f n
60C
If
Rf
Lf
Vf
Where p= no of pole pair
n= speed (rpm)
Z=no of conductor
=Flux per pole (Wb)
C= no of current/parallel path
=2p (lap winding)
=2 (wave winding)
ia
KVL:
note : ia iL
M
Ra
La
Ea
Vf i f Rf
VT Ea ia Ra
VT
PMDC is a dc motor whose poles are made of
permanent magnets.
Do not require external field circuit, no copper
losses
No field winding, size smaller than other types
dc motors
Disadvantage: cannot produce high flux
density, lower induce voltage
Torque –speed characteristic for shunt and
separately excited dc motor
E I
Developed torque, a a
E I
a a
2n
V Ea Ea
R
2
n
a
same as separately excited ,
VK f I f
2Ra
2
2
K f I f n
2Ra
m
VK f I f
c
2Ra
Starting
torque
K f 2 I f 2n
slope
2Ra
=0
n=0
n
Mohd Rusllim Mohamed
nNL n
By referring to the Torque –speed characteristic for shunt and
separately excited dc motor
VK I
f f
2Ra
2
2
K f I f n
2Ra
note that, there are three variables that can influence the
speed of the motor,
V
Variables
If
Ra
Thus, there are three methods of controlling the speed of the
shunt and separately excited dc motor,
i. Armature terminal – voltage speed control
ii. Field speed control
iii. Armature resistance speed control
Mohd Rusllim Mohamed
i.
Armature resistance speed control
-
Speed may be controlled by changing Ra
The total resistance of armature may be varied by means
of a rheostat in series with the armature
The armature speed control rheostat also serves as a
starting resistor.
From -n characteristic,
VK f I f
start c
2
R
a
K f 2 I f 2n
slope
2Ra
Will be changed
Mohd Rusllim Mohamed
Torque –speed characteristic
m
Ra1
Ra1 < Ra2 < Ra3
Ra2
Ra3
n3
n2 n1
nNL n
Mohd Rusllim Mohamed
Advantages armature resistance speed control:
i.
Starting and speed control functions may be combined in
one rheostat
ii. The speed range begins at zero speed
iii. The cost is much less than other system that permit
control down to zero speed
iv. Simple method
Disadvantages armature resistance speed control
:
i. Introduce more power loss in rheostat
ii. Speed regulation is poor (S.R difference nLoaded & nno
loaded)
iii. Low efficiency due to rheostat
Mohd Rusllim Mohamed
ii.
Field Speed Control
-
Rheostat in series with field winding (shunt or separately
ect.)
If field current, If is varied, hence flux is also varied
Not suitable for series field
Refer to -n characteristic,
- Slope and nNL will be changed
Mohd Rusllim Mohamed
Torque –speed characteristic
m
If1 < If2 < If3
1 < 2 < 3
Base speed
n1 n2
n3
nNL1
nNL2
nNL3
Mohd Rusllim Mohamed
n
Advantages field speed control:
i. Allows for controlling at or above the base speed
ii. The cost of the rheostat is cheaper because If is small
value
Disadvantages field speed control :
i.
Speed regulation is poor (S.R difference nLoaded & nno
loaded)
ii. At high speed, flux is small, thus causes the speed of the
machines becomes unstable
iii. At high speed also, the machines is unstable
mechanically, thus there is an upper speed limit
Mohd Rusllim Mohamed
iii.
Armature terminal – voltage speed control
-
Use power electronics controller
-
-
AC supply rectifier
DC supply chopper
Supply voltage to the armature is controlled
Constant speed regulation
From -n characteristic,
- C and nNL will be change
- Slope constant
Mohd Rusllim Mohamed
Torque –speed characteristic
m
V1 < V2 < V3
n3
n2
n1
nNL1 nNL1 n
nNL3
Mohd Rusllim Mohamed
Advantages armature terminal voltage speed
control:
i. Does not change the speed regulation
ii. Speed is easily controlled from zero to maximum safe
speed
Disadvantages armature terminal voltage speed
control :
i.
Cost is higher because of using power electronic
controller
Mohd Rusllim Mohamed
Mohd Rusllim Mohamed
A 120v shunt motor has the following
parameters: Ra = 0.40 Ω, Rf= 120 Ω and
rotational 240W. On full load the input current
is 19.5A and the motor runs at 1200rpm.
Determine:
a)
b)
c)
d)
Developed power
Output power
Output torque
Efficiency
Mohd Rusllim Mohamed
Given VT = 120 V, Ra = 0.40 Ω, Rf= 120 Ω , Pu= 240 W, IL= 19.5 A,
nr=1200 rpm
a)
Developed power
• 1st find If =VT/Rf
• Ia=IL- If
• Ea= VT – IaRa
• Pm= EaIa
b) Output power
Pout = Pm- Pu
c) Output torque
To=60Po /2n
d) Efficiency
Pin = VTIL
=(Po/Pin) *100
Mohd Rusllim Mohamed
460 V dc motor drives as 50 hp and at 900
rmp. The stunt field resistance as 57.5 Ω and
the armature resistance is 0.24 Ω of the motor
efficiency is 82%, determine
a) the rotational loss
b) the new developed power if the motor speed is
reduced to 750 rpm using armature resistance
speed control
Note : 1 horse power = 746watt.
Mohd Rusllim Mohamed
Given VT = 460 V , Po= 50 hp (due to word of drives as otherwise
rated output) Ra = 0.24 Ω , Rf= 57.5 Ω , nr= 900 rpm, = 82%
a)
Pu?
• Po = 50hp x 746 W
• =(Po/Pin) *100, hence Pin
• Pin = VTIL, hence IL
• If =VT/Rf
• Ia=IL- If
• Ea= VT – IaRa
• Pm= EaIa
• Pu = Pm- Pout
Mohd Rusllim Mohamed
Ea=KKn
◦ Ea1 Kn1
◦ Ea2 Kn2
◦ For Ea1 / Ea2
Kn1/Kn2 ,then
Ea2
Note that for armature
resistance speed
control Torque remains
the same
𝜏1 = 𝜏2
60𝑃𝑚
2𝜋𝑛1
=
60𝐸𝑎1𝐼𝑎1
2𝜋𝑛1
60𝑃𝑚2
2𝜋𝑛1
=
60𝑃𝑚2
2𝜋𝑛2
Mohd Rusllim Mohamed
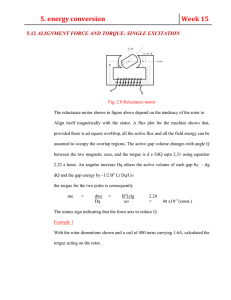
There are two factors affecting the
performance of dc machine
1. Armature reaction
2. Armature inductance
Definition of armature reaction:
1. It is the term used to describe the effects of the armature
mmf on the operation of a dc machine as a "generator"
no matter whether it is a generator or motor.
2. It effects both the flux distribution and the flux magnitude
in the machine.
3. The distortion of the flux in a machine is called armature
reaction
Two effects of armature reaction:
1. Neutral Plane Shift
2. Flux Weakening
Effect on flux
distribution: Neutral
plane shift
◦ When current is flowing
in the field winding,
hence a flux is produced
across the machine
which flows from the
North pole to the South
pole.
◦ Initially the pole flux is
uniformly distributed and
the magnetic neutral
plane is vertical
Effect on flux
distribution: Neutral
plane shift
◦ effect by the air gap on the
flux field causes the
distribution of flux is no
longer uniform across the
rotor.
◦ There are two points on the
periphery of the rotor where
B= 0.
Effect on flux distribution:
Neutral plane shift
◦ when a load connected to the
machines a resulting
magnetic field produced in
the armature
◦ If the armature is rotated at a
speed by an external
torque each armature coil
experiences a change in flux
t as it rotates.
◦ A voltage is generated across
the terminals of each winding
according to the equation e =
t
Effect on flux
distribution: Neutral
plane shift
◦ Both rotor and pole fluxes
(flux produced by the field
winding and the flux
produced by the armature
winding) are added and
subtracted together
accordingly
◦ The fields interact to
produce a different flux
distribution in the rotor.
◦ Thus, the flux on the middle
line, between the two field
poles, is no longer zero.
Effect on flux distribution: Neutral
plane shift
The combined flux in the machine
has the effect of strengthening or
weakening the flux in the pole.
Neutral axis is therefore shifted in
the direction of motion.
The result is current flow circulating
between the shorted segments and
large sparks at the brushes. The
ending result is arcing and sparking
at the brushes.
Solution to this problem:
◦ placing an additional poles on the
neutral axis or mid-point that will
produce flux density component,
which counter-acts that produced
by the armature.
Effect on flux magnitude: Flux
Weakening
Most machine operate at
saturation point
When the armature reaction
happen, at location pole surface:
◦ The add of rotor mmf to pole
mmf only make a small increase
in flux
◦ The subtract of rotor mmf from
pole mmf make a large
decrease in flux.
◦ The result is the total average
flux under entire pole face is
decreased.
◦ This is called Flux Weakening
d –flux decrease under subtracting section of poles
When rotor turns, thus we have inductance value,
e1 = L(di/dt). Lat say current ia1.
That means, we have ability to store energy
If the machine is turn ‘off’, thus, e1 will decreased.
This will affect the current as well. Say ia2.
When the machine is turn ‘on’ again, it will produce
e2 while e1 is still inside. The current now is
reversed direction from previous (decreasing)
current.
Thus, it will cause sparking resulting the same
aching problem caused by neutral plane shift.