IMPLEMENTATION OF A CONTROL SYSTEM FOR RECLOSERS
advertisement

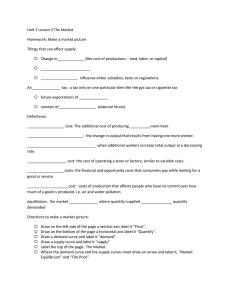
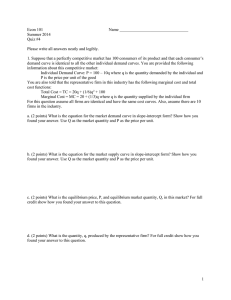
IMPLEMENTATION OF A CONTROL SYSTEM FOR RECLOSERS USING A DIGITAL SIGNAL PROCESSOR WANIR J. MEDEIROS JR., JOSÉ W. L. NERYS, ENES G. MARRA PEQ, Escola de Engenharia Elétrica e de Computação, Universidade Federal de Goiás Praça Universitária S/N, 74605-220 Goiânia, GO, Brasil wanirjr@ig.com.br, jwilson@eee.ufg.br, enes@eee.ufg.br Abstract This paper presents the experimental results of a digital control for hydraulic reclosers using Digital Signal Processors (DSP). Some characteristic curves are implemented and some experimental results are shown to illustrate the recloser operation. Hydraulically controlled reclosers normally present good mechanic performance, however they present a limited operating set, which makes it difficulty to implement a coordinated operation with modern reclosers and other protective devices. Keywords automatic recloser, digital signal processor, overcurrent protection, electrical distribution protection. Resumo Religadores hidráulicos possuem boa característica mecânica, porém têm apresentado problemas de coordenação com outros religadores modernos devido a limitada capacidade de alteração de suas características de operação. A idéia básica deste trabalho é apresentar os resultados experimentais da digitalização do controle de religador usando Processador Digital de Sinais (DSP). Palavras-chave religadores automáticos, processador digital de sinais, proteção de sobre-corrente. 1 Introduction Reclosers have been in use for more than half a century and their operation principle consists in interrupting the main current of a system, when an over current condition is detected, and in automatically restoring the energy supply after a previously programmed time. In those cases when the fault is cleared no other action is taken. On the other hand, when an over current state persists, the recloser will open and close the main circuit for a preset number of times. After the fourth opening action, the main switches are kept opened and locked-out, which requires the intervention of a technical operator. Automatic Reclosers are protective equipments that are used to reduce the interruption time of distribution systems and, consequently, to increase the reliability of those systems. They allow the power to be restored after a short time when temporary faults occur, such as those caused by trees, strong winds and animal contact. Previous studies show that 60% to 75% of the electric faults in distribution systems are due to transient causes. The expansion of the electrical distribution system has led to a more and more difficult coordinating task of the reclosers. This has required more versatile and precise protective equipments, so that the older ones (hydraulic reclosers) cannot any more fulfil the requirements of the modern distribution systems, because they have limited operating characteristics. The main purpose of this work is present experimental results of a digital control system for hy- draulic reclosers belonging to an Energy Company in Brazil, so as to allow them to use their good physical characteristics with a more versatile and precise control system. 2 DSP Development This work has been developed using the DSP kit ADMC401 by Analog Devices. It has a high performance in applications such as industrial process control and motor drive and its main characteristics are: • 26 MIPS fixed-point DSP core; • single cycle instruction execution, 38.5 ns; • 12 –Bit pipeline flash analog-to-digital converter; • digital-to-analog converter, 8 channels and 12 bits; • two double buffered synchronous serial ports; • three-phase PWM generation unit; • 12 programmable digital I/O ports. The ADMC401 has a flexible architecture and single instructions that allows to the processor several parallel processing. It also contains a fast, high accuracy, multiple-input analog-to-digital converter unit with simultaneous sampling capabilities. The described DSP kit was chosen due its high capability for acquisition and processing data, which may result in a more precise calculus of the RMS values of the currents. The implemented program was developed in assembly of the chosen DSP and its processing sequence is: acquisition of the three main currents; calculus of their RMS values cycle by cycle; comparison between the RMS values and their corresponding limits obtained from the time-current curves, which will be described further on. The calculated rms values of the currents are stored for future analysis and visualization. The RMS value of the current is given by the square root of the sum of each sampled value, squared, divided by the number of samples for a complete cycle (S). The expression used for calculating the rms value of the current is: I rms = ∑i 2 (1) S ( The sample time is 50µs, which results in 334 samples for a 16.667 ms period. A serial communication channel is used to transfer the necessary configuration set from a microcomputer to the DSP platform so as to attend the operational requirements. 3 Interface Software To support the DSP platform another program was developed using Delphi programming language. This tool is used to plot curves based on standard equations by IEEE, IEC and ABB, which allow a comparative analysis between different curves, for a protective study. The plotted curves are called inverse time-current characteristics and they are used to calculate the delay time between an over current detection and the necessary action to protect the distribution system. To a better understanding of those inverse-time curves it is necessary to understand the operating principle of an induction relay. Its characteristic curve is the result of the integration of a current function with respect to time. It has basically three types of curves: moderately inverse, very inverse and extremely inverse curves. These curves are chosen so as to keep a coordinated operation with other protective equipments. Expression (2), by IEEE C37.901989, is used to calculate the pickup time of an inverse-time over current curve. Where: A + B n M P −1 ( ) Expression (2) is similar to the IEC 255-03 equation, except for the addition of constant B, added to the IEEE equation. This constant defines the definite time component resulting from the core saturation of an induction type relay. Expression (3) is a more generic form of inverse-time over current curve, and it is used by ABB Power Company: A 14n − 5 t(I ) = + B P M −C 9 Where: i = sampled value of the current; S = number of samples for a complete cycle. t(I ) = t(I) = trip time in seconds for M > 1; M = multiple of pickup currents; A, B and P = constants to provide selected curve characteristics. Their values define whether the curves will be moderately, very or extremely inverse; n = time dial. (2) ) (3) Where: C = constant to provide selected curve characteristics. The developed program allows plotting any of these three types of curves, with and automatic adjust of the constant values. Furthermore, the user may prefer to choose any other values for constants of expression (3), so as to create a personal inverse-time over current curve for a particular project. The resulting curves after applying the discussed expressions may be saved as a bitmap file to be printed and analysed on a later occasion. Fig. 1 shows the moderately, very, and extremely inverse curves resulting from standard IEEE C37.90. Fig. 2 shows similar curves, resulting from standard IEC 255-4. It can be seen from Fig. 1 and Fig. 1 that the IEEE curves present shorter time responses to a specific value of over current, when compared to the IEC curves. After choosing the most appropriate curve, the user should transfer it to the DSP platform through the microcomputer serial port. The transmitted curve is used by the DSP algorithm to calculate the time-response equivalent to the fault current. The calculated time is used to drive the recloser. The developed program also allows the user to set the following parameters of the recloser: delayed time; reclosing time, i.e., interval of time between one opening action and the next closing action; reset time, i.e., necessary time to clear the register of the last faults; minimum trip current and the number of open/close actions. 4 Experimental Results Experimental tests were performed using the recloser model ESV3810 by Cooper Power Systems. The main characteristics of the recloser are: • nominal voltage – 34.5 kV; • nominal pickup current – 800 A; • maximum current – 10 kA; • vacuum interruption; • transformation ratio – 1000/500:1 A. Before carrying out these experimental tests, the the original recloser control (Kyle Form 6 control) was replaced by the implemented DSP control system. The adopted transformation ratio was 500:1 A. An AC current source was used for simulating a short circuit current of 670 A through the recloser terminals. Figure 3 shows the system assembly in the laboratory. Figure 1. IEEE inverse time-current characteristic. Figure 3. System assembly. Figure 2. IEC inverse time-current characteristic. Fixed delayed times can be set for each one of the trip operations, and these times may be added, or not, to the delayed times defined through the inversetime curve. The minimum trip current may be set per phase on a three-phase system and the number of open/close action may be adjusted between one and four. Figures 4 to 7 show the results for the recloser currents. The adopted scale is 1000 A/div. The programmed pickup current for these results is 200 A, and the short circuit current is 670 A, and it was applied to one of the recloser three phases. The programmed time for the first reclosing action is 0.5 seconds. In figure 4, the IEC extremmely inverse time curve was used with dial time of 0.5. The calculated time for the recloser action was of 3.91 s. The measured time was of 4.2 s, which corresponds to an error of aproximately 7.5%. The same test as before, however using the IEEE extremmely inverse time curve, with dial time of 0.5, resulted in an operating time of 1.57 s, against a calculated time of 1.45 s. Therefore, for the test conditions above, the IEEE curve resulted in a faster response, when compared to the IEC response. The same test as before was also performed using the ABB extremmely inverse time curve. Figure 6 shows the corresponding results. The calculated time for the first pickup was 144 ms. The second reclosing action was programmed for 5 s. measured time was 1.36 s, which corresponds to na error of 7.1%. Figure 4. Experimental result using IEC extremely inverse curve, with n = 0.5. Figure 7. Experimental result using specific inversse curve. 5 Conclusion This research work is intended to improve the distribution system coordination of the protective equipments belonging to CHESP Energy Company – Brazil, by applying a more versatile and modern control system, based in Digital Signal Processors. It is seen, from the experimental results that the error between the calculated operating time and the effectively measured time is less then 10% for all four implemented curves, which confirms the high response of the system. Figure 5. Experimental result using IEEE extremely inverse curve, with n = 0.5. Acknowledgment The authors would like to express their gratitute to CHESP Energy Company for the financial support to this research work and FUNAPE for the presentation support. References Figure 6. Experimental result using ABB extremely inverse curve, with n = 0.5. Figure 7 shows the result for a fourth time inverse curve, which was created by the user. The used constants are: A = C = n = 1, B = 0.05 e P = 0.5. The calculated time for the first pickup was 1.27 s. The Fisher, D. A., Seeker, S. A. Automatic Circuit Reclosers: Characteristics and Application Factors" on Application and Coordination of Reclosers, Sectionalises, and Fuses. IEEE Tutorial Course, New York, USA, 1980, Chapter. 4, pp. 37-47. AIEE Paper 54.262, "Coordination of Protection and Construction of Distribution Circuits", Report by Transmission and Distribution and Relays Committee. IEEE Power Engineering Society. .IEEE Standard Inverse-Time Characteristic Equations for Over current Relays. IEEE Std. C37.112-1996, 1997. American National Standard for Automatic Circuit Reclosers for Alternating Current Systems, ANSI C37.60-1974, American National Standards Institute. Analog Devices. ADMC401 Datasheet - SingleChip, DSP-Based High Performance Motor Controller. Rev. B, 2000. Analog Devices. Motor Control Embedded DSP Solutions, Application Notes ADM401. Mamede, J. Filho. Manual de Equipamentos Elétricos, Editora LTC, Rio de Janeiro, 1994: 456p.