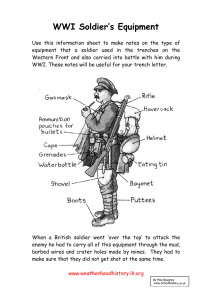
Recognizing Soldier Activities in the Field
advertisement

Recognizing Soldier Activities in the Field
David Minnen1 , Tracy Westeyn1 , Daniel Ashbrook1 , Peter Presti2 , and Thad Starner1
1
Georgia Institute of Technology, College of Computing, GVU, Atlanta, Georgia, USA. {dminn, turtle, anjiro, thad}@cc.gatech.edu
2
Georgia Institute of Technology, Interactive Media Technology Center, Atlanta, Georgia, USA. peter.presti@imtc.gatech.edu
Abstract— We describe the activity recognition component
of the Soldier Assist System (SAS), which was built to meet
the goals of DARPA’s Advanced Soldier Sensor Information
System and Technology (ASSIST) program. As a whole, SAS
provides an integrated solution that includes on-body data
capture, automatic recognition of soldier activity, and a multimedia interface that combines data search and exploration.
The recognition component analyzes readings from six on-body
accelerometers to identify activity. The activities are modeled
by boosted 1D classifiers, which allows efficient selection of
the most useful features within the learning algorithm. We
present empirical results based on data collected at Georgia
Tech and at the Army’s Aberdeen Proving Grounds during
official testing by a DARPA appointed NIST evaluation team.
Our approach achieves 78.7% for continuous event recognition
and 70.3% frame level accuracy. The accuracy increases to
90.3% and 90.3% respectively when considering only the
modeled activities. In addition to standard error metrics, we
discuss error division diagrams (EDDs) for several Aberdeen
data sequences to provide a rich visual representation of the
performance of our system.
Keywords— activity recognition, machine learning, distributed sensors
I. I NTRODUCTION
The Soldier Assist System (SAS) was created for
DARPA’s Advanced Soldier Sensor Information System
and Technology (ASSIST) program. The stated goal of
the ASSIST program is to “enhance battlefield awareness
via exploitation of information collected by soldier-worn
sensors.” The task was to develop an “integrated system
and advanced technologies for processing, digitizing and
reporting key observational and experiential data captured
by warfighters” [1]. SAS allows soldiers to utilize on-body
sensors with an intelligent desktop interface to augment their
post-patrol recall and reporting capability (see Figure 1).
These post-patrol reports, known as after action reports
(AARs) are essential for communicating information to
superiors and future patrols. For example, a soldier may
return from a five hour patrol and his superiors may ask for
a report on all suspicious situations encountered on patrol.
In generating his report, the soldier can use the SAS desktop
interface to view all of the images taken around the time of
Fig. 1.
Screenshot of the SAS desktop interface
a particular activity such as taking a knee or raising his field
weapon. These situations are likely to contain faces, places,
or other events of interest to the soldier. These images can
be used to jog the soldier’s memory, provide details that
may have gone unnoticed during patrol, and provide relevant
data to be directly included in the soldier’s AAR for further
analysis by superiors.
The automatic recognition of salient activities may be a
key part of reducing the amount of time spent manually
searching through data. Working with NIST, DARPA, and
subject matter experts, we identified 14 activities important for generating AARs: running, crawling, lying on the
ground, a weapon up state, kneeling, walking, driving,
sitting, walking up stairs, walking down stairs, situation
assessment, shaking hands, opening a door, and standing
still. During interviews, soldiers identified the first five
activities as the most important.
Given these specific requirements, our sensing hardware
was tailored to these activities and for the collection of rich
multimedia data. The on-body sensors include six threeaxis accelerometers, two microphones, a high resolution still
camera, a video camera, a GPS, an altimeter, and a digital
compass (see Figure 2). The soldier activities are recognized
by analyzing the accelerometer readings, while the other
sensors provide content for the desktop interface.
Given the number of sensors and the magnitude of the
data, we used boosting to efficiently select features and learn
accurate classifiers. Our empirical results show that many
of the automatically selected features are intuitive and help
justify the use of distributed sensors. For example, driving
can be detected by identifying engine vibration detected by
the hip sensor while in a moving vehicle.
In Section V, we present cross-validated accuracy measurements for several system variations. Standard accuracy
metrics do not always account for the impact that different
error types have on continuous activity recognition applications, however. For example, a trade-off could exist between
identifying all instances of a raised weapon (potentially with
imprecise boundaries) and obtaining precise boundaries for
each identified event but failing to find all of the instances.
To better characterize the performance of our approach,
we discuss error division diagrams (EDDs), a recently
introduced performance visualization that allows quick, visual comparisons between different continuous recognition
systems [2]. The SAS system favors higher recall rates rather
than higher precision rates because the activity recognition
is used to highlight salient information for a soldier. Failing
to identify events can cause important information to be
overlooked, while a soldier can easily cope with potential
boundary errors by scanning the surrounding media.
II. R ELATED W ORK
Many applications in ubiquitous and wearable computing
support the collection and automatic identification of daily
activities using on-body sensing [3], [4], [5]. Westeyn and
Vadas et al. proposed the use of three on-body accelerometers to support the identification and recording of autistic
self-stimulatory behaviors for later evaluation by autism
specialists [6]. In 2004, Bao and Intille showed that the use
of two accelerometers positioned at the waist and upper arm
were sufficient to recognize 20 distinct activities using the
C4.5 decision tree learning algorithm with overall accuracy
rates of 84% [7]. Lester et al. reduced the number of
sensor locations to one position by incorporating multiple
sensor modalities into a single device [8]. Using a hybrid
of both discriminative and generative machine learning
methods (modified AdaBoost and HMMs) they recognized
10 activities with an overall accuracy of 95%. Finally,
Raj et al. simultaneously estimated location and activity
using a dynamic Bayesian network to model sensor activity
and location dependencies while relying on a particle filter
for efficient inference [9]. Their approach performs similarly
to that of Lester et al. and elegantly combines activity
recognition and location estimation.
III. S OLDIER A SSIST S YSTEM O N -B ODY S ENSORS
The SAS on-body system is designed to be unobtrusive
and allow for all-day collection of rich data. The low power,
Fig. 2. Left: Soldier wearing the SAS sensor rig at the Aberdeen Proving
Grounds. Right: Open Camelbak showing OQO computer and connectors.
lightweight system consists of sensors spanning several
modalities along with a wireless on-body data collection
device. Importantly, the sensors are distributed at key locations on the body, and all but two are affixed to standard
issue equipment already worn by a soldier.
The major sensing components used for soldier activity
recognition are the six three-axis bluetooth accelerometers
positioned on the right thigh sidearm holster, in the left
vest chest pocket, on the barrel of the field weapon, on a
belt over the right hip, and on each wrist via velcro straps.
Each accelerometer component consists of two perpendicularly mounted dual-axis Analog Devices ADXL202JE
accelerometers capable of sensing ±2G static and dynamic
acceleration. Each accelerometer is sampled at 60Hz by a
PIC microcontroller (PIC 16F876). The Bluetooth radio is a
Taiyo Yuden serial port replacement module that handles the
transport and protocol details of the Bluetooth connection.
Each sensor is powered by a single 3.6V 700mA lithium
ion battery providing 15-20 hours of run-time.
Data from the wireless accelerometers (and other streaming sensors) are collected by an OQO Model 01+ palmtop
computer. The OQO and supporting equipment is carried
inside the soldier’s Camelbak water backpack. The OQO
sits against the Camelbak water reservoir to both cushion the
OQO against sudden shock and to to help avoid overheating.
Two 40 watt-hour camcorder batteries provide additional
power to the OQO and supply main power to other components in the system. These batteries provide the system with
a run time of over 4 hours.
Our system also contains off-the-shelf sensing components for location, video, and audio data. Affixed to the
shoulder of the vest is a Garmin GPSMAP 60CSx. The unit
also houses a barometric altimeter and a digital compass.
Two off-the-shelf cameras are mounted on the soldier’s
helmet. The first is a five megapixel Canon S500 attached
to the front of the helmet on an adjustable mount. A power
cable and USB cable run from the helmet to the soldier’s
backpack. The OQO automatically triggers the camera’s
shutter approximately every 5 seconds and stores the images
on its internal hard drive. A Fisher FVD-C1 mounted on the
side of the helmet. This camera records MPEG-4 video at
640x480 to an internal SD memory card.
Our system has two microphones for recording the soldier’s speech and ambient audio in the environment. One
microphone is attached to the helmet and positioned in front
of the soldier’s mouth by a boom. The second microphone
is attached to the arm strap of the Camelbak near the chest
of the soldier. Both microphones have foam wind shields
and are powered by a USB hub attached to the OQO.
The various sensors are not hardware synchronized. To
account for asynchronous sensor readings, we ran experiments to estimate the latency associated with each sensor.
The collection and recording software running on the OQO
is responsible for storing a timestamp with each sensor reading and applying the appropriate temporal offset to account
for the hardware latency. This provides rough synchronization across the different sensors and frees later processes,
such as the data query interface and the recognition system,
from needing to adjust the timestamps individually.
IV. L EARNING ACTIVITY M ODELS
Two fundamental issues must be addressed in order to
automatically distinguish between the 14 soldier activities
that our system must identify. The first is how to incorporate
sensor readings through time, and the second concerns
choosing a sufficiently rich hypothesis space that allows
accurate discrimination and efficient learning. Although
several models have been proposed that explicitly deal with
temporal data (e.g., hidden Markov models (HMMs) and
switching linear dynamic systems (SLDSs)), these models
can be very complex and typically expend a great deal of
representational power modeling aspects of a signal that
are not important to our system. Instead, we have adopted
an approach that classifies activities based on aggregate
features computed over a short temporal window similar to
the approach of Lester et al. [8].
differential descriptors for each dimension. We also compute
aggregate features based on each three-axis accelerometer.
Originally our feature list was augmented with GPS derivatives, heading, and barometer readings. However, preliminary experiments showed that this did not significantly
improve performance and these features were not included
in the experiments discussed in this paper. This finding is in
line with that of Raj et al. who also determined that GPSderived features did not aid activity recognition in a similar
task using a different sensor package [9].
Effectively, we have transformed a difficult temporal
pattern recognition problem into a simpler spatial classification task by computing aggregate features. One potential
difficulty is determining which features are important for
distinguishing each activity. Rather than explicitly choosing
relevant features as a preprocessing step (either manually or
through an automatic feature selection algorithm), we build
models using an AdaBoost framework [10] by selecting the
dimension and corresponding 1D classifier that minimize
classification error at each iteration. This framework automatically selects the best features for discrimination and is
robust to unimportant or otherwise distracting features.
B. Boosted 1D Classifiers
AdaBoost is an iterative framework for combining binary
classifiers such that a more accurate ensemble classifier
results [10]. We use a variant of the original formulation
that includes feature selection and support for unequal class
sizes [11]. The ensemble classifier is based on the sign of
a value derived from a weighted combination of the weak
classifiers called the margin. The magnitude of the margin
gives an indication of the confidence of the classifier in
the result. Margins may not be comparable across different
classifiers however, but we can use a method developed by
Platt to convert the margin into a pseudo-probability [12].
This method works by learning the parameters of a sigmoid
function (f (x) = 1/(1+eA(x+B) )) that directly maps a margin to a probability. We fit the sigmoid to margin/probability
pairs derived from the training points and only s ave the
sigmoid parameters (A and B) for use during inference.
A. Data Preprocessing
Several steps are needed to prepare the raw accelerometer
readings for analysis. First, we resample each sensor stream
at 60Hz to estimate the instantaneous reading of every
sensor at the same fixed intervals. Next, we slide a three
second window along the 18D synchronized time series
in one second steps. For each window, we compute 378
features based on the 18 sensor readings including mean,
variance, RMS, energy in various frequency bands, and
C. 1D Classifiers
During each round of boosting, the algorithm selects
the feature and 1D classifier that minimizes the weighted
training error. Typically, decision stumps are used as the
1D classifier due to their simplicity and efficient, globally
optimal learning algorithm. Decision stumps divide the
feature range into two regions, one labeled as the positive
class and the other as the negative class. In our experiments,
we supplement decision stumps with a Gaussian classifier
that models each class with a Gaussian distribution and
allows for one, two, or three decision regions depending
on the model parameters.
Learning the Gaussian classifier is straightforward. The
parameters for the two Gaussians ((µ1 , σ1 ) and (µ2 , σ2 )) can
be estimated directly from the weighted data. The decision
boundaries are then found by equating the two Gaussian
formulas and solving the resulting quadratic equation for
x: (σ12 − σ22 )x2 − 2(σ12 µ2 − σ22 µ1 )x + [(σ12 µ22 − σ22 µ21 ) −
2σ12 σ22 log( σσ21 )] = 0.
D. Multiclass Classification
The boosting framework can be used to learn accurate
binary classifiers but direct generalization to the multiclass
case is difficult. Two common methods for combining multiple binary classifiers into a single multiclass classifier are
the one-vs-all (OVA) and the one-vs-one (OVO) approaches.
In the one-vs-all case, for C classes, C different binary
classifiers are learned. For each classifier, one of the classes,
call it ωi , is taken as the positive class while the (C − 1)
others are combined to form the negative class. When a new
feature vector must be classified, each of the C classifiers is
applied and the one with the largest margin (corresponding
to the most confident positive classifier) is taken as the final
classification. Alternatively, we can base the decision on the
pseudo-probability of each class computed from the learned
sigmoid functions.
In the one-vs-one approach, C(C − 1)/2 classifiers are
learned, one for each pair of (distinct) classes. To classify a
new feature vector, the margin is calculated for each class
pair (mij is the margin for the classifier trained for ωi vs.
ωj ). Within this framework many methods may be used to
combine the individual classification results:
• vote[ms,ps,pp] - each classifier votes for the class with
the largest margin; ties are broken by using msum,
psum, or pprod.
• msum - each class is scored as the sum of the individual
class margins; the final !
classification is based on the
C
highest score: argmax
j=1 mij (x)
computing features over three second windows spaced at one
second intervals. This means that typically there are three
different windows that overlap for each second of data. To
produce a single classification for each one second interval,
we tested three methods:
• vote - each window votes for a single class and the
class with the most votes is selected
• prob - each window submits a probability for
each class,
"3and the most likely class is selected:
argmax j=1 p(ωi |windowj )
i
•
probsum - each window submits a probability for each
class, and the class !
with the highest probability sum is
3
selected: argmax
j=1 p(ωi |windowj )
i
V. E XPERIMENTAL R ESULTS
To evaluate our approach to recognizing soldier activity,
we collected data in three situations. In each case, the subject
wore the full SAS rig and completed an obstacle course
designed to exercise all of the activities. We collected 14
sequences totaling roughly 3.3 hours of activity data and
then manually labeled each sequence based on the video
and audio captured automatically by the system. The first
round of data collection took place in a parking deck near
our lab. We created an obstacle course based on feedback
from the NIST evaluation team in order to collect an initial
data set for development and testing. The second data
set was collected at the Aberdeen Proving Ground under
more realistic conditions to supplement our initial round
of training data. Finally, we have data collected while the
subject shadowed an experienced soldier as he traversed an
obstacle course set up by the NIST evaluation team.
Figure 3 shows a graph of performance versus the number
of rounds of boosting used to build the ensemble classifier.
We learned the ensemble classifier with 100 rounds and
used a leave-one-out cross validation scheme to evaluate
performance. In this case, we learned a classifier based on 13
of the 14 sequences and evaluated it on the 14th sequence.
As you can see in the graph, performance does vary with
i
•
psum - each class is scored as the sum of the individual
class probabilities; the final !
classification is based on
C
the highest score: argmax
j=1 p(ωi |mij (x))
i
•
pprod - the classification
is based on the most likely
"C
class: argmax j=1 p(ωi |mij (x))
i
E. Combining Classifications from Overlapping Windows
As discussed in Section IV-A, we transform a temporal
recognition problem into a spatial classification task by
Fig. 3. Event and frame-based accuracy vs. number of rounds of boosting
Fig. 4. Comparison of different binary classifier merge methods to handle
multiclass discrimination
additional rounds of boosting but basically levels off after
20 rounds. Thus we only used 20 rounds of boosting in
subsequent experiments.
Although all of the features used by the activity recognition system are selected automatically, manual inspection
reveals that they are often easily interpreted. For example,
one of the primary features used to classify ”shaking hands”
is the frequency of the accelerometer mounted on the right
wrist. Interestingly, the learning algorithm selected high
frequency energy in the chest and thigh sensors as useful
features for detecting the ”driving” activity. We believe this
is due to engine vibration detected by the sensor when the
soldier was seated in the humvee. This cue highlights the
strength of automatic feature selection during learning since
high-frequency vibration is quite discriminative but might
not have been obvious to a system engineer if features had
to be manually specified.
The official performance metric established by the NIST
evaluation team measured recognition performance during
those times when one of the 14 identified soldier activities
occurred. We call the unlabeled time the “null activity”
to indicate that it constitutes a mix of behaviors related
only by being outside the set of pre-identified activities.
Importantly, the null activity may constitute a relatively
large percentage of time and contain activity that is similar
to the identified activities. It is therefore very difficult to
model the null class or to detect its presence implicitly as
low confidence classifications for the identified activities.
Performance measures for our approach in both cases (i.e.,
when the null activity is included and when it is ignored)
are given in figure 4.
As discussed in Section IV-D, there are two common
approaches for combining binary classifiers into a multiclass
discrimination framework. Figure 4 displays the perfor-
Fig. 5. Error division diagrams comparing three multiclass methods both
with and without the null class. The bold line separates “serious errors”
from boundary and thresholding errors.
mance using each of the methods. The performance is
fairly stable across the different methods, though the inferior
accuracy achieved using the msum method validates the idea
that while the margin does indicate class membership, its
value is not generally commensurate across different classifiers. Interestingly, although the recognition performance
is comparable, the average OVO training time was less
than half that of the OVA methods (11.9 vs. 29.9 minutes
without a null model and 23.9 vs. 47.3 minutes including
the null activity). Thus, selecting an OVO method can either
significantly reduce training time or allow the use of more
sophisticated weak learners or additional rounds of boosting
without increasing the run time for model learning.
We can visualize and compare the trade-offs between
various event level errors and frame level errors using
Error Division Diagrams (EDDs). EDDs allow us to view
the nuances of the system’s performance not completely
described by the standard accuracy metric involving substitution, deletions, and insertions. For example, EDDs allow
comparisons of errors caused by boundary discrepancies.
These discrepancies include both underfilling (falling short
of the boundary) and overflowing (surpassing the boundary).
EDDs also simultaniously compare the fragmentation of
an event into multiple smaller events and the merging of
multiple events into a single event. The different error types
and a more detailed explanation of EDDs can be found in
Minnen et al. [13]. Figure 5 shows EDDs for three different
multiclass methods. The EDDs show that the majority of
the errors are substitution or insertion errors.
Finally, Figure 6 shows a color-coded activity timeline
Fig. 6. Activity timeline showing the results of four system variations on one of the parking deck sequences. The top row (GT) shows the manually
specified ground truth labels. System A was trained without any knowledge of the null class, while System C learned an explicit model of the null activity.
Systems B and D are temporally smoothed versions of Systems A and C, respectively. In the smoothed systems, there is less fluctuation in the class labels.
Also note that Systems A and B never detect the null activity, and so their performance would be quite low if the null class was included in the evaluation.
Systems C and D, however, perform well over the entire sequence.
that provides a high-level overview of the results of four system variations. Each row, labeled A-D, represents the results
of a different system. These results can be compared to the
top row, which shows the manually specified ground truth
activities. The diagram depicts the effects of two system
choices: explicit modeling of the null activity (Systems C
and D) and temporal smoothing (Systems B and D).
As expected, Systems A and B perform well over the
identified activities but erroneously label all null activity
as a known class. Many of the mistakes seem reasonable
and potentially indicative of ground truth labeling inconsistencies. For example, walking before raising a weapon,
crawling before and after lying, and opening a door between
driving and walking are all quite plausible. Systems C and
D, however, provide much better overall performance by
explicitly modeling and labeling null activity. In particular,
System D, which also includes temporal smoothing, performs very well and fixes several mistakes in System C by
removing short insertion and deletion errors.
VI. C ONCLUSION
The activity recognition component of the Soldier Assist
System can accurately detect and recognize many lowlevel activities considered important by soldiers and other
subject matter experts. By computing aggregate features
over a window of sensor readings, we can transform a
difficult temporal recognition problem into a simpler spatial
modeling task. Using a boosting framework over 1D classifiers provides an efficient and robust method for selecting
discriminating features. This is very important for an onbody, distributed sensor network in which some sensors may
be uninformative or even distracting for detecting certain
activities. Finally, we show that performance is relatively
unaffected by the choice of multiclass aggregation method,
though one-vs-one methods lead to a considerable reduction
in training time.
VII. ACKNOWLEDGMENTS
This research was supported and funded by DARPA’s
ASSIST project, contract number NBCH-C-05-0097.
R EFERENCES
[1] DARPA, “ASSIST BAA #04-38, http://www.darpa.mil/ipto/
solicitations/open/04-38 PIP.htm,” November 2006.
[2] J. Ward, P. Lukowicz, and G. Tröster, “Evaluating performance in
continuous context recognition using event-driven error characterisation,” in Proceedings of LoCA 2006, May 2006, pp. 239–255.
[3] N. Kern, S. Antifakos, B. Schiele, and A. Schwaninger, “A model
for human interruptability: Experimental evaluation and automatic
estimation from wearable sensors.” in ISWC.
IEEE Computer
Society, 2004, pp. 158–165.
[4] M. Stäger, P. Lukowicz, N. Perera, T. von Büren, G. Tröster, and
T. Starner, “Soundbutton: Design of a low power wearable audio
classification system.” in ISWC. IEEE Computer Society, 2003, pp.
12–17.
[5] P. Lukowicz, J. Ward, H. Junker, M. Stäger, G. Tröster, A. Atrash,
and T. Starner, “Recognizing workshop activity using body worn
microphones and accelerometers,” in Pervasive Computing, 2004, pp.
18–22.
[6] T. Westeyn, K. Vadas, X. Bian, T. Starner, and G. D. Abowd, “Recognizing mimicked autistic self-stimulatory behaviors using hmms.” in
Ninth IEEE Int. Symp. on Wearable Computers, October 18-21 2005,
pp. 164–169.
[7] L. Bao and S. S. Intille, “Activity recognition from user-annotated
acceleration data,” in Pervasive. Berlin Heidelberg: Springer-Verlag,
2004, pp. 1–17.
[8] J. Lester, T. Choudhury, N. Kern, G. Borriello, and B. Hannaford,
“A hybrid discriminative/generative approach for modeling human
activities,” in Nineteenth International Joint Conference on Artificial
Intelligence, July 30 - August 5 2005, pp. 766–772.
[9] A. Raj, A. Subramanya, D. Fox, and J. Bilmes, “Rao-blackwellized
particle filters for recognizing activities and spatial context from
wearable sensors,” in Experimental Robotics: The 10th International
Symposium, 2006.
[10] R. E. Schapire, “A brief introduction to boosting,” in IJCAI, 1999,
pp. 1401–1406.
[11] P. Viola and M. Jones, “Rapid object detection using a boosted cascade of simple features,” in Computer Vision and Pattern Recognition,
2001.
[12] J. Platt, “Probabilistic outputs for support vector machines and
comparisons to regularized likelihood methods,” in Advances in Large
Margin Classifiers. MIT Press, 1999.
[13] D. Minnen, T. Westeyn, T. Starner, J. Ward, and P. Lukowicz,
“Performance metrics and evaluation issues for continuous activity
recognition,” in Performance Metrics for Intelligent Systems, 2006.