Dynamic Efficiency of Direct Control Based Maximum Power
advertisement

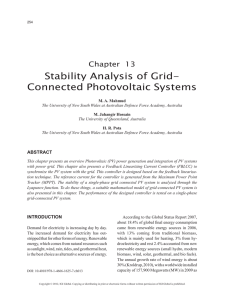
2014 Fifth International Conference on Intelligent Systems, Modelling and Simulation Dynamic Efficiency of Direct Control Based Maximum Power Point Trackers Kashif Ishaque1 and Zainal Salam2 1 Karachi Institute of Economics and Technology, Karachi 75190, Pakistan. Faculty of Electrical Engineering, Universiti Teknologi Malaysia, UTM 81310, Skudai, Johor Bahru, Malaysia. kashif@fkegraduate.utm.my, zainals@fke.utm.my 2 operates in conjunction with a dc-dc power converter, whose duty cycle is adjusted to suitably track the MPP of the PV array. However, because of the non-linear I–V characteristics of the PV curve and the consequence of the varying environmental conditions, tracking of correct maximum power point (MPP) can sometimes be a challenging task. As a result, several MPPT schemes have been proposed [6-16]; among the more popular ones are the perturb and observe (P&O) [6], incremental conductance (IC) [7, 8], ripple correlation [9], short circuit current [10] and opencircuit voltage approaches [11]. Many of these, particularly the first two, are the most commonly implemented methods in existing PV systems. The P&O is based on the perturbation in the voltage/current/duty cycle of the associated power converter while IC works by incrementally comparing the ratio of derivative of conductance with the instantaneous conductance. More recently, various researcher employed the soft computing techniques for MPPT rationale that include fuzzy logic control [12], neural network [13] and evolutionary algorithms[14-16]. It is interesting to note that in most of the aforementioned works, the results are validated using static efficiency analyses i.e. the ability of the tracker to find and hold on to the MPP once the insolation and temperature conditions are steady. Although, such approach is quite satisfactory when dealing with certain environmental variations which are almost static in nature, the performance of these methods under dynamic weather conditions could not be sufficiently quantified. This situation is more severe in the tropical regions like Malaysia, in which the weather fluctuations is very frequent and thus the MPPT have to be robust to ensure the optimal yield from the PV source. Thus, an alternative efficiency computational method, the European Standard for the Efficiency Test, can be considered as a more suitable and realistic approach to quantify the performance of inverter in such conditions. The standard is released in the form of the EN 50530 document [17]. The test is more stringent and has rapidly becomes the benchmark test to validate the MPPT performance of grid connected inverters for evaluating the steady state and dynamic efficiency. On the aforementioned basis, this work is carried out to compare the efficiency performance of the two well accepted MPPT techniques i.e. P&O and IC when tested using the EN 50530 test. Both methods are widely used in existing PV Abstract— Due to stringent standards for efficiency of maximum power point tracker (MPPT) of photovoltaic (PV) system, the performance of MPPT in PV system under dynamic environmental conditions is very crucial. Thus, this paper evaluates the performance of perturb & observe (P&O) and incremental conductance (IC) MPPT techniques using the European Efficiency Test, EN 50530, which is specifically devised for the dynamic performance of PV system. Both MPPT techniques are implemented in direct control structure in conjunction with a buck-boost converter, which is used for tracking device. Experiments are conducted using a custom designed PV array simulator. Results reveal that both methods yield almost equivalent MPPT efficiency; however, in average, the performance of IC method is found to be slightly better that gives 98.5% efficiency compare to 98.3% in P&O. It is also seen that the performance of IC method is very sensitive to its perturbation size, especially at low insolation levels. Keywords— Direct Control, dynamic efficiency; incremental conductance (IC); maximum power point tracker (MPPT); perturb and observe (P&O); photovoltaic (PV) system. I. INTRODUCTION Efficiency of a PV system is mainly influenced by three factors: (1) the efficiency of the PV cell, which depending on the technology, is about 8-15% [1], (2) the efficiency of the power converters (dc-dc and/or dc-ac) which is normally ranges between 95-98 % [2] and (3) the efficiency of the maximum power point tracking (MPPT) algorithm, which in most of the cases can go beyond 98% [3]. There are also looses due to cabling, mismatch between the array and the load/battery and energy loss in batteries [4]. To increase the efficiency of the cell, improved fabrication technologies and designs at silicon level is required [5], which is usually performed by large PV companies or well-established research institutions. Improvements in the converter topology and design can also result in improved efficiency; however, in certain cases, it can significantly increase the overall cost of the installed PV system. Alternatively, improving the MPPT algorithm is much easier, less expensive and can be retrofitted in existing PV system plants. The aim of MPPT is to ensure that at any environmental condition (particularly solar insolation and temperature), the maximum power is extracted from the PV modules by matching its I–V operating point with the corresponding power converter. Generally, a PV array 2166-0662/14 $31.00 © 2014 IEEE DOI 10.1109/ISMS.2014.79 429 direct duty cycle MPPT control. In this scheme, the PI block in Fig. 1 is eliminated and duty cycle is computed directly in the MPPT algorithm. system; hence their performance under rapid changes of weather will give a clear picture about the robustness of these MPPT techniques. To implement these practically, a dc-dc buck-boost converter is configured as MPPT in a direct control structure. Both methods are implemented using a Dspace DS1104 [18] Digital Signal Processor (DSP) which is explicitly configured to optimize the control actions. Although the test is geared for inverters, it can be readily used for DC-DC converters because the main aim is to evaluate the performance of the MPPT algorithm, rather than conversion efficiency itself [17]. The remainder of the paper is organized as follows: the next section discusses about the background knowledge of EN50530 test. Section 3 describes the MPPT structure of both methods. This is followed by a brief overview of P&O and IC techniques. While in section 5, the experimental setup of the whole efficiency test is shown. Tracking results of EN50530 test are discussed in the next section. Finally, the conclusions are made in the last section. PV Array IPV CPV MPPT * VPV* /IPV Fixed or Adaptive VPV/IPV DC/DC Converer III. L O A D VPV Duty Cycled PI q switching signal Fig. 1 A typical voltage/current based MPPT system II. THE EN50530 TEST SEQUENCE The dynamic test EN50530 standard defines a test procedure for the measurement of MPPT efficiency of the grid-connected PV systems with the help of a PV array simulator that simulates the output characteristics of a PV source. Although the test is geared for inverters, it can be readily used for DC-DC converters because the main aim is to evaluate the performance of the MPPT algorithm, rather than conversion efficiency itself [17]. The dynamic MPPT efficiency test under rapid changes of weather conditions is characterized by the combination of various ramp profiles over a certain span of time. For an entire time range, three different types of insolation regions are used to characterize three types of insolation levels based on a reference value of 1000 W/m² i.e. (1) Low to medium insolation (100–500 W/m²), (2) medium to high insolation (300–1000 W/m²) and (3) startup and shut down insolation (2–100 W/m²). For the case of (1) and (2), the sequences of ramp having slopes ranging from 0.5 W/m²/s up to 100 W/m²/s are utilized. This is followed by a single ramp profile with a slope of 0.1 W/m²/s for startup and shut down condition. Figure 2 shows the complete dynamic test profile for the EN50530 standard that is used to evaluate the effectiveness of any MPPT method. As stated earlier that, since in this work only dc-dc converter is used, it is not necessary to use the test sequence startup and shut down region as shown in Fig. 2. Thus, sequences (1) and (2) will be used to evaluate the performance of P&O and IC method. Sequence (3), i.e. for startup and shut down insolation is omitted. DIRECT CONTROL STRUCTURE OF MPPT The aim of employing MPPT is to ensure that at any environmental condition (particularly solar insolation and temperature), maximum power is extracted from the PV modules. This is achieved by matching the PV’s MPP with the corresponding power converter’s operating voltage and current. Fig. 1 shows the general block diagram of MPPT in conjunction with a dc-dc converter. Although a stand-alone dc-dc system is depicted here, the application can be extended to a grid connected PV system by adding other power electronic devices such as inverter and grid components. Basically, the MPPT works by sensing the current and voltage of the PV array; using this information the array power is calculated and compared with the present value of MPP. Accordingly, the duty cycle of the converter is adjusted using a PI or hysteresis controller to match the MPP– which in turn, forces the converter to extract the maximum power from the array. An alternative control structure is characterized by directly updating the duty cycle of the power converter; this is known in literature as the Fig. 2 The complete dynamic test profile IV. BRIEF OVERVIEW OF MPPT TECHNIQUES A. Perturb and Observe (P&O) The working principle of P&O is depicted by the flowchart in Fig. 3. The algorithm introduces a perturbation (Φ) in the duty cycle of power converter that changes the operating voltage and current of PV array and subsequently 430 is based on duty cycle, d*. Another alternative yet effective way to utilize the IC was proposed by number of researchers [19]. The idea is to generate a marginal error ε using the instantaneous conductance and the incremental conductance. Mathematically, it can be written as: the change in the operating power is observed. The increment in operating power implies that the converter is getting closer to the MPP. Accordingly, in the next sampling cycle, the direction (slope) of perturbation is retained and the reference duty cycle is further increased by an amount Φ. dI I dV V (4) From (4), it can be seen that the value of ε is zero at MPP. Therefore, based on the amount of ε, the same rules of IC using (3) can be used. The value of ε is usually selected based on the tradeoff between the accuracy of (4) and oscillations around MPP. Furthermore, this value should be less than perturbation step Φ. It can be noted that (2) rarely exists in practical application; hence selecting a suitable value of ε eases the MPPT algorithm. The basic flow chart for IC is depicted in Fig. 4. It can be noticed that the reference signal is based on duty cycle, d*. Fig. 3 Basic flow chart of Perturb and Observe (P&O) B. Incremental Conductance (IC) The idea behind IC is to incrementally compare the ratio of derivative of conductance with the instantaneous conductance [1]. It is derived from the fact that at MPP, the derivative of power with respect to voltage (dP/dV) is in fact zero, i.e. dP d (VI ) dI I V 0 dV dV dV (1) Equation (1) can be rearranged in the following form: I dI I V dV V (2) where ΔI and ΔV are the increments of PV current and voltage, respectively. The basic rules for IC can thus be derived from the basic P–V characteristics (not shown here for brevity) and can be written as: I dI dV V , at MPP I dI , Left of MPP V dV I dI dV V , Right of MPP Fig. 4 Basic flow chart of Incremental Conductance (IC) V. (3) EXPERIMENTAL SETUP An overall block diagram of the experimental set-up to compute the MPPT efficiency using the EN 50530 standard is shown in Fig. 5 (a). The photograph of the experimental rig is depicted in Fig. 5 (b). In this work, the buck–boost topology is designed for continuous inductor current mode with the following specifications: C1 = 470 μF, C2 = 220 μF, L = 1 mH, and 50-kHz switching frequency. Using the rules in (3), the basic flow chart for IC is depicted in Fig. 4. It can be noticed that the reference signal 431 PVAS IPV DC/DC Buck-Boost Converter CPV VPV Digital ground Power ground L O A D Gate driver Voltage Transducer DS1104 Current Transducer PCI PC (b) (a) Fig.5 (a) Overall block diagram of the experimental set-up (b) experimental rig A resistive load of 10Ω is connected at the output of MPPT converter. To ensure that system attains the steady state before another MPPT cycle is initiated, the sampling time is chosen as 50ms. To realize the EN 50350 insolation sequence, the test are conducted using a custom-designed PV Array Simulator, the PVAS [20]. The simulator consists of a linear, high-voltage MOSFET based power stage and current controller which is controlled by an integrated I–V curve generation unit based on a voltage controlled current source concept. The I–V curve generation unit consists of an integrated RAM, which holds the I–V curves and a microprocessor unit that provides complete communication, monitoring and measurement capabilities. The PV array configuration that is used to emulate the actual I–V curves is comprised of one string, having four series-connected modules. Each module is rated at STC as follows: PMAX = 60 W, IMPP = 3.5 A, VMPP = 17.1 V, ISC = 3.8 A and VOC = 21.1 V. Both P&O and IC methods are implemented using the flow chart as given in Fig. 3 and 4, with a fixed step perturbation (Φ) of 0.01. This value is selected based on the tradeoff between tracking speed and steady state MPP oscillations. Additionally, the marginal value of error ε for the IC method is chosen to be 0.002 which is significantly less than perturbation size and thus, it will not interrupt the MPPT function. VI. as the initial setting time is imposed on the PV array, as shown in the second zoomed view in Fig. 6. This is introduced to make MPPT converter in stable condition and for that reason, these uniform sectors are accounted for dynamic efficiency computations. It can be seen in Fig. 6 that P&O method adequately tracks the ideal MPP power for the whole dynamic profile (ramps sequence). However, a consistent deviation between the dotted line (ideal MPP power) and solid line (actual PV power) is clearly visible, as shown in the zoomed view 1. This implies that P&O method with a fixed perturbation size (Φ) of 0.01 is slower in nature despite a significantly less MPPT sampling time of 0.05s. This is due to the slower dynamics of hill climbing nature of P&O method that operates in open loop control fashion. Besides this, due to the fixed value of Φ in the MPPT algorithm, the oscillations at the steady state are constantly appearing that also deteriorating the dynamic performance of P&O. In average, this tracking difference between the dotted and solid line results in an approximately 1.5% MPP error in the tracked power. RESULTS AND DISCUSSION Figure 6 shows the results of ideal array MPP variables (power and voltage) and measured MPP variables obtained by P&O method for dynamic test sequence in Fig. 2. The ideal power and voltage is the calculated PV power and voltage based on the applied insolation on solar array, which is computed inside the PVAS software. These measured variables are obtained using the data acquisition system of PVAS and accordingly analyzed using the Matlab tools. By observing the obtained results, it can be seen that the complete set of results of Fig. 6 are comprised of 5 hours and 15 minutes. To start a new ramp sequence in Fig. 6, a uniform value of insolation for a certain period (60s), which is known Fig. 6 Performance of P&O method under dynamic test conditions Figure 7 shows the results of IC technique for the same dynamic profile of Fig. 5. Similar to P&O, the IC method is also tracking the ideal MPP power well enough for the whole 432 TABLE I DETAILED PERFORMANCE OF P&O AND IC METHODS UNDER DYNAMIC WEATHER CONDITIONS insolation profile. But, zoomed view (of the dotted circle in Fig. 7), shows the fair evidence that IC method too does not closely follow the PV power imposed by the EN 50530; as the tracking error between the dotted line and solid line is truly visible. However, the average performance of IC method is just better than P&O (will be shown later in Table 1). Nevertheless, the oscillatory behavior of IC in Fig. 7 confirms the fact that this method also suffers with the steady state fluctuations, as reported in several works [5, 9]. Number of ramps Slope Duration in per slop (W/m2/s) (s) Low to medium insolation region 2 0.5 3240 2 1 1640 3 2 1260 4 3 1147 6 5 1080 8 7 1074 10 10 1000 10 14 771 10 20 600 10 30 467 10 50 360 Medium to high insolation region 10 10 1600 10 14 1200 10 20 900 10 30 667 10 50 480 10 100 340 ƞMPPT P&O ƞMPPT IC 98.10 98.25 98.18 98.22 98.18 98.16 98.20 98.17 98.18 98.16 98.03 98.39 98.37 98.33 98.37 98.35 98.32 98.31 98.33 98.08 98.34 98.30 98.39 98.45 98.44 98.42 98.35 98.28 98.59 98.58 98.60 98.56 98.56 98.50 ACKNOWLEDGMENT The authors would like to thank Karachi Institute of Economics and Technology (KIET) and Inverter Quality Control Centre (IQCC) of Universiti Teknologi Malaysia (UTM) for providing the research facilities to conduct this research. Fig. 7 Performance of IC method under dynamic test conditions The detailed dynamic performance (only the ramps portion) of both methods is given in Table 1. The results are tabularized with respect to different slopes in the complete profile. It can be seen that under low to medium insolation region, the average dynamic efficiency of P&O and IC method is found to be 98.17% and 98.32%, respectively. The performance of IC method is somehow better than P&O; especially, at higher slopes, where the resulting efficiency of IC is 98.30% to that of 98% in P&O. This once again highlights the fact that a fixed step P&O is very slow to react for the variable weather conditions. From the obtained results, it is interesting to note that the performance of both methods under medium to high insolation region is slightly improved. The average efficiency in this case is found to be 98.4% and 98.6% for P&O and IC, respectively. The better performance of both approaches can be attributed to its perturbation size Φ that gives better results at higher current. VII. REFERENCES [1] O. Wasynezuk, "Dynamic Behavior of a Class of Photovoltaic Power Systems," Power Apparatus and Systems, IEEE Transactions on, vol. PAS-102, pp. 3031-3037, 1983. [2] P. Midya, et al., "Dynamic maximum power point tracker for photovoltaic applications," in Power Electronics Specialists Conference, 1996. PESC '96 Record., 27th Annual IEEE, 1996, pp. 1710-1716 vol.2. [3] K. Ishaque, et al., "An Improved Particle Swarm Optimization (PSO)??based MPPT for PV with Reduced Steady State Oscillation," IEEE Transactions on Power Electronics, vol. 27, pp. 3627-3638, 2012. [4] W. R. Anis and M. A.-S. Nour, "Energy losses in photovoltaic systems," Energy Conversion and Management, vol. 36, pp. 11071113, 1995. [5] K. Ishaque and Z. Salam, "A review of maximum power point tracking techniques of PV system for uniform insolation and partial shading condition," Renewable and Sustainable Energy Reviews, vol. 19, p. 14, 2013. [6] N. Femia, et al., "Optimization of perturb and observe maximum power point tracking method," Power Electronics, IEEE Transactions on, vol. 20, pp. 963-973, 2005. [7] C.-H. Lin, et al., "Maximum photovoltaic power tracking for the PV array using the fractional-order incremental conductance method," Applied Energy, vol. 88, pp. 4840-4847, 2011. [8] A. Safari and S. Mekhilef, "Simulation and Hardware Implementation of Incremental Conductance MPPT With Direct Control Method Using Cuk Converter," Industrial Electronics, IEEE Transactions on, vol. 58, pp. 1154-1161, 2011. [9] T. Esram, et al., "Dynamic Maximum Power Point Tracking of Photovoltaic Arrays Using Ripple Correlation Control," Power Electronics, IEEE Transactions on, vol. 21, pp. 1282-1291, 2006. [10] T. Noguchi, et al., "Short-current pulse-based maximum-power-point tracking method for multiple photovoltaic-and-converter module system," Industrial Electronics, IEEE Transactions on, vol. 49, pp. 217-223, 2002. CONCLUSION In this work, the performance of two well known MPPT techniques i.e. P&O and IC method is tested under dynamic environmental conditions. The obtained results have shown that both P&O and IC method in their fixed step perturbation structure does not yield better efficiency. The IC method has slightly better average performance and results 98.5% efficiency compare to 98.3% in P&O. The performance of each method is deteriorated at low insolation levels, especially IC method that on many occasions gives efficiency less than 95%. However, the performance of both methods can be improved by employing the adaptive perturbation size in their respective MPPT structure. 433 [11] C. Dorofte, et al., "A combined two-method MPPT control scheme for grid-connected photovoltaic systems," in Power Electronics and Applications, 2005 European Conference on, 2005, pp. 10 pp.-P.10. [12] R. Kyoungsoo and S. Rahman, "Two-loop controller for maximizing performance of a grid-connected photovoltaic-fuel cell hybrid power plant," Energy Conversion, IEEE Transactions on, vol. 13, pp. 276281, 1998. [13] A. K. Rai, et al., "Simulation model of ANN based maximum power point tracking controller for solar PV system," Solar Energy Materials and Solar Cells, vol. 95, pp. 773-778, 2011. [14] K. Ishaque, "A Deterministic Particle Swarm Optimization Maximum Power Point Tracker for Photovoltaic System under Partial Shading Condition," IEEE Transaction on Industrial Electronics, vol. In press, 2012. [15] K. Ishaque, et al., "Application of particle swarm optimization for maximum power point tracking of PV system with direct control method," in 37th Annual Conference on IEEE Industrial Electronics Society, 2011, pp. 1214 - 1219. [16] K. Ishaque, et al., "Maximum Power Point Tracking for PV system under partial shading condition via particle swarm optimization," in Applied Power Electronics Colloquium (IAPEC), 2011 IEEE, 2011, pp. 5 - 9. [17] R. Bründlinger, et al., "prEN 50530 – THE NEW EUROPEAN STANDARD FOR PERFORMANCE CHARACTERISATION OF PV INVERTERS," in 24th European Photovoltaic Solar Energy Conference, 2009. [18] "dSPACE GmbH. DS1104 RTLib Reference. Paderborn (Germany): User’s Guide. 2004.." [19] W. Wenkai, et al., "DSP-based multiple peak power tracking for expandable power system," in Applied Power Electronics Conference and Exposition, 2003. APEC '03. Eighteenth Annual IEEE, 2003, pp. 525-530 vol.1. [20] "User’s Manual, “Programmable Photovoltaic Array Simulator PVAS1”, Arsenal Research, 2007.AIT Austrian Institute of Technology," ed. Kashif Ishaque received his B.E. in Industrial Electronics Engineering from Institute of Industrial Electronics Engineering, NEDUET, Karachi, Pakistan, in 2007, Master of Engineering science and PhD from Universiti Teknologi Malaysia in 2009 and 2012 respectively. He is currently an assistant professor at Department of Electronics Engineering; PAF Karachi Institute of Economics and Technology (PAF-KIET), Karachi, Pakistan. Dr. Kashif is the author and co-author of around 40 publications in international journals and proceedings. His research interests include photovoltaic modelling and control, intelligent control, nonlinear systems control and optimization techniques such as genetic algorithm (GA), particle swarm optimization (PSO) and differential evolution (DE). Zainal Salam Zainal Salam obtained his B.S., M.E. and Ph.D. from the University of California, the Universiti Teknologi Malaysia (UTM) and the University of Birmingham, UK, in 1985, 1989 and 1997, respectively. He has been a lecturer at UTM for 24 years and is now a Professor of Power Electronics in the School of Electrical Engineering. He has been working on several research and consulting projects in the area of battery powered converters. Currently he is the Director of the Inverter Quality Control Center (IQCC) at UTM which is responsible for testing PV inverters that are to be connected to the local utility grid. His research interests include all areas of power electronics, renewable energy, power electronics and machine control. 434