Towards a structure-borne sound source characterization for low-noise design H.A. Bonhoff∗, B.A.T. Petersson Institute of Fluid Mechanics and Engineering Acoustics, Technische Universität Berlin, Einsteinufer 25, D-10587 Berlin, Germany Abstract The concepts and approaches proposed for structure-borne sound source characterization can roughly be divided into three categories. Such are approaches that are primarily concerned with the acquisition of the required data, prediction methods that allow for a comparison of vibrational sources as well as theoretical concepts that deal with possible ways to process and view the source and receiver data in order to provide physical insight for design and optimization purposes. The present paper is directed towards the progress in the latter category. Among the approaches for low-noise design, the concept of interface mobilities offers the most general and straightforward physical interpretation combined with an enhanced numerical stability. The applicability of the interface mobility approach for the characterization of vibrational sources, however, relies upon the admissibility of neglecting the so-called cross-order terms. It is found that omitting the cross-order terms can result in misinterpretations at certain frequencies. On average, however, it is demonstrated that the cross-order terms are insignificant and can be neglected with good approximation. Owing to the resultant general applicability, the concept of interface mobilities appears suitable to form a basis for structure-borne sound source characterization for low-noise design. Keywords: structure-borne sound, source characterization, interface mobilities ∗ Corresponding author. Tel.: +49-30-31428996; fax: +49-30-31425135. Email address: hannes.bonhoff@tu-berlin.de (H.A. Bonhoff) URL: http://www.akustik.tu-berlin.de (H.A. Bonhoff) Preprint submitted to Applied Acoustics July 19, 2010 1. Introduction The lack of a well developed and commonly accepted methodology for structure-borne sound source characterization in contrast to air-borne sound causes substantial technical problems for the manufacturing industry and acoustic consultancies [1]. For the manufacturer, target setting as well as noise and vibration predictions at early design stages are severely hampered, thereby preventing lead-time reductions. With respect to consultancies, planning and design of vibration isolation measures often rely upon trial-anderror methods or experience and only coarse estimates can be achieved for noise and vibration predictions in the final installation. A pressing research task therefore is to further develop approaches for the characterization of structure-borne sound sources. The first decade of the new millennium has generated several promising advancements in structure-borne sound source characterization, see for instance Refs. [2, 3, 4, 5], as well as two European standards that include developments on the subject [6, 7]. In the literature, however, the term structure-borne sound source characterization has been used as a synonym for a rather wide spectrum of methods and approaches. In order to avoid a confusion of the objectives of the various approaches, a categorization is considered to be necessary. Three main objectives have been identified: • Approaches for measurement of the required data such as the structural dynamic properties as well as the activity of the source structure, e.g. mobilities and source free velocity [1]. • Approaches for prediction of e.g. the transmitted power to a receiver structure in order to allow a comparison of vibrational sources. • Approaches for design by processing and viewing the source and receiver data in a way yielding physical insight that facilitates an optimization of the source and the complete installation. It is important to note that there is a certain overlapping of the three categories above. The approaches for prediction, for instance, also include measurement procedures in most of the cases. The inclusion of a processing of the measured data to obtain e.g. the characteristic power [6] therefore represents the distinguishing feature between the pure measurement methods and those for prediction. 2 The approaches suitable for low-noise design on the other hand also allow for a prediction of e.g. the transmitted power. The distinguishing feature between the approaches for prediction and those for design is the representation of the data in a way yielding physical insight that allows for an optimization. For the approaches for design, furthermore, the required input variables often are described as unpractical in comparison with those necessary for the approaches for prediction [8]. In order to close the circle, it should be mentioned that it is most likely that pure measurement methods are applied in conjunction with the approaches for design for obtaining the required input data. An overview of approaches for structure-borne sound source characterization categorized in accordance with the three groups above is presented in Section 2. It should be noted here, that the grouping of the various approaches in Section 2 is based on their current state of development. Future advancements of the approaches may lead to changes in the categorization. The present paper focuses on the progress of an approach for low-noise design and therefore directly follows Ref. [1]. For air-borne sound, the source strength defined by the transmitted power represents an independent characterization of the source. A similar definition for the characterization of structure-borne sound sources is not possible due to the dependence of the transmitted power on the receiver mobility [9]. The term source strength in conjunction with structure-borne sound source characterization therefore requires a proper definition prior to its use. The source descriptor and coupling function [10] represent a solution to the problem and are commonly recognized as forming a rigorous basis for structureborne sound source characterization, cf. Refs. [9, 2]. Consequently, they are often used as a starting point for the development of approaches for low-noise design, see Section 2.3. Initially, however, the concept of source descriptor and coupling function is valid for the single-point and single-component case, only. The characteristic power [2] offers a rigorous generalization of the source descriptor for the multi-point and multi-component case, see Section 2.2.5. Due to the required matrix inversion, however, an insight to the underlying physics is obscured and an amplification of measurement errors is likely to occur [2]. By incorporating the interface mobilities [11] in the concept of source descriptor and coupling function the problem can be reformulated for an improved physical insight and numerical stability, see Section 3. The applicability of interface mobilities for structure-borne sound source charac3 terization is discussed in Section 4 followed by a few results regarding the numerical stability in Section 5. 2. Approaches for structure-borne sound source characterization 2.1. Approaches for measurement 2.1.1. Free velocity The international standard ISO9611 [12] describes a procedure for measuring the velocity of resiliently mounted machines which can be used as an approximation for the free velocity. Since the activity, i.e. the map of the result of all internal vibration producing mechanisms, can be described by the free velocity, this method is straightforward. For the prediction of e.g. the transmitted power or the vibration amplitude at the contact points, the mobilities of both source and receiver have to be obtained as well. 2.1.2. Indirect measurement of mobility and free velocity Pavić and Elliott propose an approach for obtaining the mobilities of the source and the receiver as well as the free source velocity from measurements on the resiliently coupled source and receiver [13, 14]. Provided that the mounts are force conservative, their mobilities are not required. With the data set obtained it is possible to fully describe the source-receiver installation when the coupling mounts are removed. An alternative approach is also presented in Ref. [13], where the mount properties have to be known. While no assumptions have to be made for this method, the matrix inversion involved is likely to amplify errors in the input variables [15]. The necessity of an excitation at the coupling points, however, limits the applicability of both measurement methods. 2.1.3. Indirect measurement of blocked force and mobility Elliott and Moorhouse et al. demonstrate in Refs. [16, 17] that the blocked force can be calculated by the mobility of the combined source-receiver structure and the velocity at the interface. Both these quantities can be obtained from measurements in the installed condition. While it is likely to allow the placement of accelerometers close to the connection between the source and the receiver, the excitation for the mobility measurement constitutes an inconvenience. In order to circumvent this difficulty and to improve the results, the approach has been further developed using remote measurement positions and the application of reciprocity [17]. An experimental validation 4 for a laboratory installation of two beams coupled at two points is presented in Ref. [5]. A similar approach for obtaining the mobility is described in Ref. [18]. Here, the source has to be measured in the uncoupled condition. By using remote measurement positions that are convenient for the force excitations, the problem can be overdetermined resulting in an improved accuracy. Moreover, moment and in-plane components can be included without the need to apply moments or in-plane excitations. 2.2. Approaches for prediction 2.2.1. Reception plate In the reception plate method, the source is attached to a passive standard structure of which the averaged velocity in combination with the mass and the loss factor yields the transmitted power [19, 4]. Idealizations such as a velocity source hold for light structures where the source mobility is much lower than the receiver mobility [20, 21]. Similarly, heavy structures can be used for the force source approximation [22, 23]. The reception plate method can be applied for approximate predictions in known environments such as heavy-weight buildings [24, 7]. The reduction of the complete complex description to single equivalent values, however, leads to a limited physical transparency [8]. 2.2.2. Equivalent excitation Methods of equivalent excitation have been proposed [25, 26], where the source is described by a single equivalent force, sometimes termed the vibromotive force [27, 28, 29]. This is done using reciprocal methods [30, 31] or source substitution [32]. The approach appears promising in its simplicity, however, considering multi-point and multi-component systems, it is rather unlikely that a single fictitious excitation will characterize the source sufficiently well. 2.2.3. Pseudo and equivalent forces Verheij et al. present the pseudo-forces method [33, 34, 35], where the internal excitation of the machine is reproduced by a number of point forces applied on the outer surface. This method has been successfully used for a comparison of the activity of different machines [36, 37, 3] and rank ordering of transmission paths [32, 38]. A similar approach is presented also by Ohlrich, termed equivalent forces [39, 40]. These methods have to be handled 5 with care since the source characterization is not entirely independent of the receiving structure. Furthermore, it is not possible to directly compare sets of pseudo forces determined at different positions on the same or another source, although they might be equivalent [34]. 2.2.4. Synthesized force Lai introduces an approximation in Ref. [41], where the transmitted power is estimated by the product of the contact velocity and the so-called synthesized force. Obtained from the mobility of the combined source-receiver structure at the interface and the contact velocity, the synthesized force is later shown to be the blocked force [17]. The synthesized force approximation, therefore, represents a reformulation of the constant force source approximation where the transmitted power is obtained from measurements in the installed condition. For the measurement of the combined sourcereceiver mobility, however, the application of an excitation at the connection points in the installed condition constitutes an inconvenience. 2.2.5. Characteristic power Moorhouse et al. propose the characteristic power as an extension of the source descriptor [10] in order to make it suitable for the multi-point and multi-component case [42]. Together with the coupling factor, the emission of machines can be determined [2]. The characteristic power as defined in Ref. [2] does not include any simplifications and therefore represents a theoretically rigorous result. As the approach is based on the matrix formulation [43], however, the effects of measurement errors are likely to be amplified due to the matrix inversion required [15]. In Ref. [44], therefore, simplifications are introduced in order to circumvent the amplification of measurement errors and to reduce the required measurements. A further simplified characteristic structure-borne sound source power level has been introduced in the European standard EN 12354-5 [6]. 2.3. Approaches for design 2.3.1. Source descriptor and coupling function The equation for the complex power at the interface of a single-point and single-component source-receiver installation can be manipulated in a way yielding two coefficients, the source descriptor and the coupling function [10]. The source descriptor is independent of the receiver characteristics and can be interpreted as the source’s ability to deliver power. Combined with the 6 coupling function, which consists of a ratio of source and receiver mobilities, the structure-borne sound emission can be calculated. In Refs. [45, 46] the applicability of this approach has been confirmed. Since the source descriptor concept is defined on a power basis, translational and rotational contributions are dimensionally compatible. However, when dealing with multi-point and multi-component systems, this concept has to be reformulated as described in the following. 2.3.2. Effective mobility The concept of the effective mobility was introduced in order to reduce a multi-point and multi-component case to an equivalent single-point and single-component case by a linear combination of point, transfer, point-cross and cross-transfer mobilities involving force and moment ratios [47, 48, 49]. The effective mobility can be used in the source descriptor for the multi-point and multi-component case, where the physical source can be decomposed into source components [50, 11]. Because of the force and moment ratios, however, the source descriptor is no longer independent of the receiver characteristics. By predicting or assuming these ratios, the independence of the source descriptor can be retained [49, 9, 51]. 2.3.3. Subdivision into frequency regions The mobility function of any finite structure can be divided into distinct frequency regions such as the mass, stiffness and resonance controlled regions. Using this fact, the physical source can be split up into theoretical sources with well defined frequency ranges [50, 48, 52]. Since the dynamic behavior of the source within each region is known and equal for point, transfer and cross mobilities, generally applicable simplifications can be introduced [53, 51]. 2.3.4. Multipole expansion Pinnington and Pearce express the transmitted power from a vibrational source to a receiver structure by the sum of the powers transmitted by a number of poles, e.g. monopole, dipole, etc. [54]. If the structures are symmetric, or if the vibration poles can be assumed to be uncorrelated, the single-point and single-component case formally is retained yielding physical insight. A brief study of the effect of violating such assumptions is presented in Ref. [55]. Moorhouse and Gibbs demonstrate in Ref. [56] that the multipole expansion represents a special case of the eigenvalue expansion. 7 2.3.5. Eigenvalue expansion For multi-point excitations of passive structures, the transmitted power can be expressed as a sum of orthogonal power modes by using mobility matrix eigenvalues and eigenvectors [57, 56]. The main advantage of this approach is that it yields strict upper and lower bounds of the transmitted power for cases where the excitation forces are not known, see also Ref. [58]. For structures that feature two perpendicular axes of symmetry, furthermore, the eigenvectors correspond to physically highly comprehensible excitation modes such as monopoles and dipoles. Without symmetry, however, a physical interpretation of the eigenvectors becomes less straightforward [56]. By extending this approach in order to include source data, the introduction of simplifying assumptions has lead to a narrowed applicability [59]. 2.3.6. Terminal source power Ohlrich and Larsen propose the terminal source power [60, 61], where the magnitude of the source mobility is used for a reduction to a real-valued spectrum and an improved numerical stability [62]. Furthermore, the power coupling factor is introduced in Ref. [62], which allows the calculation of the transmitted power for a given terminal source power. By neglecting the coupling between contact points, the contacts can be treated as independent power sources that can be superimposed [62]. As recognized in Ref. [63], however, the coupling between contacts cannot be ignored in general and a possible solution to this problem is presented. 2.3.7. Interface mobilities Instead of treating each contact point between the source and the receiver separately, a single continuous interface can be considered which comprises all contact points. Within a closed contour, the field variables and mobilities can be series expanded into interface orders [64, 11]. Interface mobilities defined in such a way formally restore the single-point and single-component case and can therefore be used in the source descriptor formulation [10], albeit at the expense of a slightly more elaborate post-processing of the system data. The interface orders are directly linked to elementary vibrational characteristics such as the rigid-body motion and consequently represent physically highly comprehensible quantities. In combination with the gained formal simplicity of the single-point and single-component case, therefore, the interface mobility approach offers physical insight which is essential with respect to design. 8 Furthermore, due to the circumvented matrix inversion, this approach is expected to be less sensitive to measurement errors [11]. The applicability of interface mobilities for source characterization relies upon the admissibility of neglecting a possible coupling between different orders. 2.4. Conclusions Among the approaches for design, the interface mobilities offer a representation of the source and receiver data that allows for the most general and straightforward physical interpretation. In Section 3, therefore, the concept of interface mobilities is described in more detail followed by a discussion of the applicability of interface mobilities for source characterization in Section 4. 3. Concept of interface mobilities Along a theoretically continuous line interface which passes all contact points, the field variables, e.g. forces and velocities, can be treated as continuous and strictly periodic, see Fig. 1. By means of a spatial Fourier series expansion, therefore, the velocity along the interface v(s) can be decomposed into a sum of velocity orders v̂p 1 v̂p = C ZC v(s)e−jkp s ds (1) 0 with v(s) = ∞ X v̂p ejkp s , kp = p=−∞ 2pπ , C p ∈ Z. (2) A list of symbols is given in Appendix A. Similarly, the force orders F̂q are obtained by ZC 1 F̂q = F (s0 )e−jkq s0 ds0 (3) C 0 with F (s0 ) = ∞ X F̂q ejkq s0 , q=−∞ 9 kq = 2qπ , C q ∈ Z. (4) (a) (b) F(s0,3) F(s0,2) Source F(s0,4) C Receiver F(s0,1) s, s0 Figure 1: Illustration of multi-point interfaces: (a) multi-point installation; (b) multi-point interface. – – – interface. In order to allow a transfer coupling in addition to the point coupling between force excitation and velocity response, two separate interface coordinates (s and s0 ) are required. The excitation coordinate is represented by s0 , while s is the coordinate of the response. The velocity or force orders v̂p or F̂q can be interpreted as the complex amplitudes of waves traveling along the interface. The exponential terms in Eqs. (2) and (4), i.e. ejkp s and ejkq s0 , describe the initial spatial distribution of such waves and are referred to as interface orders. Combined with the velocity or force orders, these interface orders are adjusted in accordance with the actual velocities v(s) or forces F (s0 ) at the interface. The magnitude of the corresponding velocity or force orders scales the interface orders in amplitude, while the phase results in a shift along the interface. The interface order distributions presented in Fig. 2, i.e. Re[ejkp s ] = cos(kp s) are equal for positive and negative orders, e.g. with p = ±1. The sign of the order numbers determines the direction of the interface orders along the interface. When summing up a truncated series of the interface orders with the associated complex amplitudes, the initial spatial velocity or force distribution is approximated, see Eq. (2) or (4), respectively. Positive and negative interface orders, e.g. with ejk1 s0 and ejk−1 s0 , that are superimposed can result in standing waves along the interface when the corresponding complex amplitudes are equal. In the general case, the velocities v(s) and forces F (s0 ) along the interface are non-symmetric, complex distributions. The positive and negative force or velocity orders, therefore, are independent, i.e. v̂p 6= v̂−p and F̂q 6= F̂−q , see Ref. [65]. In contrast to the frequency spectrum of a real10 (b) (a) 1 0 -1 Re[ejk4s0] 1 Re[ejk1s0] Re[ejk0s0] 1 (c) 0 -1 -1 y 0 y x x y x Figure 2: Illustration of interface order distributions along a circular interface: (a) zero order; (b) first order; (c) forth order. — interface order; – – – interface. valued time signal, consequently, the negative orders cannot be discarded in general. For the case of the velocity along a circular interface of a source structure, the zero and first orders describe the rigid body motion. The zero-order velocity represents the translational motion, while the first-order velocity describes the rocking motion, see Figs. 2(a) and (b). Velocities of orders larger than one represent the translational component perpendicular to the structure of the vibrational wave field along the interface. The point and transfer mobilities along the interface can be written in a two-dimensional, continuous form Y (s|s0 ). The point mobilities occur when s = s0 and the transfer mobilities are found for s 6= s0 . Analog to the velocities and forces along the interface, the mobilities Y (s|s0 ) can be series expanded into the mobility orders Ŷpq which are termed the interface mobilities ZC ZC 1 Y (s|s0 )e−jkp s e−jkq s0 ds ds0 (5) Ŷpq = 2 C 0 0 with Y (s|s0 ) = ∞ ∞ X X Ŷpq ejkp s ejkq s0 . (6) p=−∞ q=−∞ Owing to the two-dimensional form of Y (s|s0 ), the interface mobilities have two independent orders, i.e. p and q. In order to avoid a confusion between Y (s|s0 ) and the interface mobilities Ŷpq , henceforth, the term ordinary mobilities refer to the point and transfer mobilities Y (s|s0 ). For multi-point interfaces with an approximately equal distance between the contact points along the interface, fast Fourier transform algorithms can 11 be employed for the calculation of the force and velocity orders as well as the interface mobilities, see Ref. [66]. For a better understanding of the link between interface mobilities and force and velocity orders, the relationship Y = v/F in the interface order domain can be studied. It should be noted here, that the spatial force distribution along the interface as well as the force orders are defined to have the dimension force per unit length, i.e. N/m. For the velocities and mobilities, a normalization by the unit length is less convenient. The dimensions of the symbols used in this work are given in Appendix A. v̂p = C ∞ X Ŷp−q F̂q = C Ŷp−p F̂p + C ∞ X Ŷp−q F̂q (7) q=−∞ q6=p q=−∞ The above equation states that the coupling between a force of order q and the p-th velocity order is described by the interface mobility Ŷp−q . The interaction between equal-order force and velocity is characterized by the interface mobility Ŷp−p , which thus is termed equal-order interface mobility. Consequently, the coupling between different orders of force and velocity is described by the cross-order interface mobilities Ŷp−q with p 6= q. As indicated on the right hand side of Eq. (7), the sum can be divided into two parts, i.e. the contribution of a force of the same order F̂p coupled through the equal-order interface mobility and the contribution of all other P force orders, C Ŷp−q F̂q with p 6= q. The first part is termed the equal-order term and the second part comprises all cross-order terms with the cross-order interface mobilities. The sum of all cross-order terms in Eq. (7) prevents the derivation of the quantities relevant for source characterization in the interface order domain. The applicability of interface mobilities for structure-borne sound source characterization therefore depends on the admissibility of neglecting the cross-order terms. After omission of the cross-order terms, the complex power can be written as [66] Qp = C 2 Ŷp−p,R |F̂p,BS Ŷp−p,S |2 1 Ŷp−p,R |v̂p,F S |2 = , 2 |Ŷp−p,S + Ŷp−p,R |2 2 |Ŷp−p,S + Ŷp−p,R |2 Q= ∞ X Qp (8) p=−∞ and the source descriptor and coupling function follow as 1 |v̂p,F S |2 C2 Sp = = |F̂p,BS |2 Ŷp−p,S , ∗ 2 Ŷp−p,S 2 12 S= ∞ X p=−∞ Sp , (9) ∗ Ŷp−p,S Ŷp−p,R Cf,p = , Cf = Q/S. (10) |Ŷp−p,S + Ŷp−p,R |2 Two possible expressions are given, i.e. where the source activity is described by the velocity of the freely suspended source or alternatively by the forces of the blocked source. Furthermore, the transmitted power and the velocity at the contact points are given by ∞ h i |v̂p,F S |2 1 X Re Ŷp−p,R W = 2 p=−∞ |Ŷp−p,S + Ŷp−p,R |2 (11) ∞ h i |F̂ 2 C2 X p,BS Ŷp−p,S | Re Ŷp−p,R , = 2 p=−∞ |Ŷp−p,S + Ŷp−p,R |2 v(s) = ∞ X v̂p,F S p=−∞ =C ∞ X 1− Ŷp−p,S Ŷp−p,S + Ŷp−p,R F̂p,BS Ŷp−p,S 1− p=−∞ ! ejkp s Ŷp−p,S Ŷp−p,S + Ŷp−p,R ! (12) ejkp s . 4. Applicability of interface mobilities As described in the previous section, the applicability of interface mobilities for structure-borne sound source characterization depends on the significance of the cross-order terms. The cross-order terms are found to be consisting of cross-order interface mobilities and force orders, see Eq. (7). In the following two subsections, therefore, the influence of cross-order interface mobilities and the distribution of the force-orders are studied separately. The investigation of the significance of the complete cross-order terms is presented in Section 4.3. 4.1. Cross-order interface mobilities Analog to the force and velocity orders, a physical interpretation of the various interface mobility terms is possible by studying their spatial distribution over the interface domains s and s0 . The product of the two exponential functions in Eq. (6) forms these spatial distributions, which herein are referred to as interface mobility shape functions. As for the force and velocity orders, see Section 3, the interface mobilities Ŷpq represent the corresponding complex amplitudes. The interface mobility shape functions presented 13 in Figs. 3 and 4 can be interpreted as components of the shape function of Y (s|s0 ), i.e. the ordinary mobility shape function, for an arbitrary line interface on any kind of structure. In the ordinary mobility shape functions, the point mobilities are found on the main diagonal, where s equals s0 , and the transfer mobilities are found on the off-diagonal elements. Considering the real part of the mobility shape functions facilitates the physical interpretation. For a unity excitation force at s0 , the ordinary mobility shape functions represent the instantaneous vibration amplitudes of the structure along the interface. (b) 1 0 -1 C C s0 0 0 (c) 1 Re[ejk2sejk-2s0] e jk s jk s -1 0] 1 Re[e Re[e 0 e jk s jk s 0 0] (a) 0 -1 C s C s0 0 0 1 0 -1 C C s0 s 0 0 s Figure 3: Equal-order interface mobility shape functions with p = −1: (a) Ŷ00 ; (b) Ŷ1−1 . – – – Main diagonal and parallel lines with s − s0 = const.; – · – co-diagonal and parallel lines. (b) 0 -1 C C s0 0 0 s (c) 1 Re[ejk1sejk-2s0] 1 Re[ejk1sejk1s0] Re[ejk1sejk0s0] (a) 0 -1 C C s0 0 0 s 1 0 -1 C C s0 0 0 Figure 4: Cross-order interface mobility shape functions: (a) Ŷ01 ; (b) Ŷ11 ; (c) Ŷ21 ; (d) Ŷ2−1 . The equal-order interface mobilities are seen to be symmetric and constant along the main diagonal and parallel lines, see Fig. 3(a). This symmetry 14 s represents the physical attribute reciprocity. The variation of the mobility shape functions along the co-diagonal and lines parallel thereto, see Fig. 3(b), can be interpreted as the transfer mobility dependence on the distance between excitation and response positions. The equal-order interface mobility of order zero is constant for all combinations of s and s0 , see Fig. 3(a), and thus describes the case where excitation and response couple equally irrespective of their relative locations along the interface. In contrast to equal-order interface mobilities, the shape functions of the cross-order interface mobilities show variations along the main diagonal and parallel lines, see Fig. 4. Along these lines, the distance along the interface s−s0 = ∆s is constant and hence equal to zero for the case of point mobilities. Moving along the main diagonal of the mobility shape functions or along any parallel line, is equivalent to moving the positions of excitation and response along the interface under the condition that ∆s = s − s0 is constant. In the investigation of the influence and significance of the cross-order terms, therefore, it is sensible to re-define the ordinary mobilities. Henceforth, point and transfer mobilities are defined by the distance ∆s between excitation and response positions s0 and s along the interface. A transfer mobility defined in such a way has a fixed distance ∆s and is a function of the location along the interface. For a given interface, therefore, only one point mobility exists, which likewise is a function of the interface coordinate s. From the above examination of the interface mobility shape functions, an assumption can be stated for the relation between cross-order and equalorder interface mobilities when re-establishing the ordinary mobility shape functions in accordance with Eq. (6). It is presumed that the cross-order interface mobilities constitute the characteristics which cannot be represented by the equal-order interface mobilities. Such characteristics are the variations along the main diagonal and lines parallel thereto. With the former definition of ordinary mobilities, hence, the cross-order interface mobilities represent the dependence of point and transfer mobilities on the location along the interface. When averaging an ordinary mobility over all possible locations along the interface, the dependence on such locations drops out. In the following equation, therefore, only equal-order interface mobilities remain. 1 C ZC Y (s + sint |s0 + sint ) dsint = ∞ X Ŷp−p ejkp (s+s0 ) (13) p=−∞ 0 With the knowledge of their influence, the significance of the cross-order 15 interface mobilities is discussed in the following. Presented are results for two types of generic structures, i.e. a simply-supported finite plate and a beamframe structure consisting of four infinite beams, see Fig. 5. In Fig. 6 are compared the superpositions of all interface mobility terms with those of the cross-order and equal-order interface mobilities. The importance of the crossorder interface mobilities is either indicated by the mismatch between all interface mobilities and the equal-order interface mobilities or the matching between all interface mobilities and the cross-order interface mobilities. (a) (b) r0 2L 0 Figure 5: Interface systems: (a) plate-like structure; (b) frame-like structure. – – – Interface. At low frequencies, where the wavelength is much larger than a characteristic dimension of the interface, the structures move predominantly in phase. Excitation and response therefore couple approximately equal, irrespective of their relative locations along the interface. Consequently, the equal-order interface mobility of order zero dominates all other terms and the cross-order interface mobilities are of subordinate importance. With increasing Helmholtz number, the distance to the boundaries and discontinuities becomes of the order of the governing wavelength. The ordinary mobilities therefore become more and more dependent on the location along the interface. As a result, the superposition of the cross-order interface mobilities approaches the same order of magnitude as the sum of all interface mobility terms. In the upper frequency region for plate-like structures, the influence of the cross-order interface mobilities vanishes asymptotically. In this region the boundaries virtually get out of range in terms of wavelength. The dynamic characteristics of the structure therefore more and more approach those of the corresponding infinite one, where all cross-order interface mobilities are equal to zero. 16 (a) -1 -3 10 | ^ Ypq| 10 -5 10 -1 10 kBr0 0 10 -1 10 kBL0 0 10 10 1 (b) -2 -4 10 | ^ Y pq | 10 -6 10 10 1 Figure 6: Superposition of interface mobilities: (a) plate-like structure; (b) frame-like structure. — All interface mobilities; – – – cross-order interface mobilities; · · · equalorder interface mobilities. In contrast to plate-like structures, the influence of the cross-order terms on frame-like structures does not decrease with increasing frequency in the upper Helmholtz number region. The structural discontinuities due to the corners or joints of the beam frame are located along the interface. With increasing frequency, these discontinuities therefore do not get further and further away from the interface in terms of wavelength but remain part of the interface. Additionally, the transmission path between excitation and response positions follows the interface, see Fig. 5(b). Thus, all transfer mobilities are strongly affected by such discontinuities. On plate-like structures, the transfer mobilities vanish asymptotically with increasing frequency by virtue of divergence. As the wave propagation is one-dimensional in slender beams, the transfer mobilities remain important in the upper frequency 17 region for frame-like structures. From Fig. 6, the omission of the cross-order interface mobilities is found to result in an acceptable estimate also at intermediate and large Helmholtz numbers. For a precise representation of e.g. resonances and anti-resonances, however, the cross-order interface mobilities cannot be neglected. 4.2. Force orders In principle, the distribution of the force orders can be pivotal for the admissibility of neglecting the cross-order terms. Consider the case where a force of order p is substantially smaller than another force order F̂q and the cross-order interface mobility Ŷp−q with p 6= q is of similar magnitude as the equal-order interface mobility Ŷp−p . Here, the equal-order approximation is likely to give a poor estimate of e.g. the source descriptor of order p. This is due to the fact, that, in this case, the cross-order term C Ŷp−q F̂q is larger than the equal-order term C Ŷp−p F̂p . If all force orders are equal, on the other hand, the importance of the cross-order interface mobilities applies for that of the cross-order terms. In the following, therefore, focus is put on the spreading in magnitude of the force orders. The basic dependencies of the force orders on the relative magnitudes and phase of the contact forces are illustrated in Fig. 7. Three examples of spatial force distributions with the resultant force orders are presented. Fig. 7(a) shows the case where the contact forces are in phase and of equal magnitude at all contact points. Removing one contact point and letting the other three contact forces remain equal in magnitude and phase, results in the spatial force distribution in Fig. 7(b). In the resultant forceorder distribution, the orders which were zero in the previous configuration, are now present with different phase. In Fig. 7(c), the phase of two of the contact forces from Fig. 7(a) has been shifted. In the resultant force-order distributions, all force orders which are present in one case, are equal to zero in the other case. Hence, the magnitude and phase distribution of the force orders depends on both the relative magnitudes and phases of the forces at the contact points. The forces at the contact points of source-receiver installations have previously been investigated in conjunction with effective mobilities [47]. In Ref. [47], the assumption of equal magnitude of the contact forces has been introduced. In an experimental investigation by Mondot [49] it is found that the force magnitudes vary by a factor up to 100 at low frequencies but 18 |Fq| (a) ^ 0 0 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 0 1 2 3 4 5 6 7q8 9 10 11 12 13 14 15 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 π -1 s0 ^ (F ) q F(s0) 1 0 -π y q x |Fq| (b) ^ 0 0 π -1 (F ) q s0 ^ F(s0) 1 0 -π y q x q |Fq| (c) ^ 0 0 π -1 (F ) q s0 y ^ F(s0) 1 0 -π x q q Figure 7: Example of the force-order dependence on the relative magnitudes and phase of the forces at the contact points: (a) in-phase contact forces; (b) dependence on relative magnitudes; (c) dependence on relative phase. −→ Force at contact point; - - - interface; • origin of the interface coordinate. 19 converge with increasing frequency. From the measurements of a washing machine and a tumble dryer, the variations between the magnitudes of the contact forces are observed to range up to a factor ten in the entire frequency region, see Ref. [67]. The relative phases of the forces at four-point source-receiver interfaces have been analyzed by Fulford and Gibbs [9, 53, 51]. The contact forces can be obtained from the three variables, free source velocity and source and receiver mobility [43]. The phase of the mobility or the free velocity of e.g. a resonance-controlled source can assume any value between ±π. Furthermore, the phase will fluctuate in this frequency region and can therefore be described as random. It is argued in Ref. [51] that the relative phases of the contact forces are random within a certain frequency band if the phase of at least one of the former three variables is random. Where the phases of mobilities and free velocities are deterministic and the internal excitations of the source are coherent, the contact forces will either be in phase or out of phase [53, 51]. From the discussion of the forces at the contact points above, two distinct spatial distributions are identified. Such distributions are characterized by a random relative phase of the contact forces and on the other hand by either in-phase or out-of-phase contact forces. The relative magnitudes of the contact forces can range from approximately uniform to a factor up to 100 for both cases. Information about the magnitude range of the resultant forceorder distributions can be obtained by means of Monte Carlo simulations [68]. For four-point installations with rectangular alignment of the contact forces with random relative phase, the force orders are found to differ by an average factor smaller than 10. If the contact forces are either in phase or out of phase with approximately equal magnitude, an exceedingly large spreading in magnitude is observed for the force orders. However, a factor ten in magnitude of the contact forces suffices to lower the magnitude range of the force orders to values similar to the case where the contact forces have a random relative phase. 4.3. Cross-order terms Based on the knowledge of the importance of the cross-order interface mobilities and the distribution of the force orders, the significance of the cross-order terms is discussed below. With the receiver mobilities and the forces at the contact points, the transmitted power can be calculated with 20 and without the cross-order terms. ∞ ∞ ∞ h h i i C2 X C2 X X ∗ Re F̂p,R Ŷp−q,R F̂q,R ≈ Re Ŷp−p,R |F̂p,R |2 W = 2 p=−∞ q=−∞ 2 p=−∞ (14) The factor between the complete transmitted power and the equal-order approximation is therefore used as an indicator for the importance of the crossorder terms. In a numerical study involving Monte Carlo simulations, the two theoretically possible spatial force distributions from Section 4.2 are exerted on the structures from Section 4.1. For the finite-plate receiver with contact forces of random magnitude and random phase, the two expressions in Eq. (14) differ by an average factor of 1.2. Furthermore, the simulations result in maximum differences between the complete and reduced transmitted power of two orders of magnitude. Contact forces of random magnitude and random phase on the beam-frame structure result in an average factor of 1.1 with maximum values of one order of magnitude. In simulations for cases where the contact forces are either in phase or out of phase, a source structure is modeled as a rigid block and then connected to the plate- and frame-like receiver structures at low frequencies. Here, the contact forces are calculated by the matrix formulation [43]. The complete transmitted power is found to differ from that without the cross-order terms by an average factor of 1.6 for the finite-plate receiver with maximum differences lower than ten. Slightly lower values apply for the beam-frame structure. For an experimental investigation of the significance of the cross-order terms, the transmitted power of two source-receiver installations is studied below. The first installation is a tumble dryer on a beam-stiffened chipboard plate with one side on a stiffener and the other side on a bay. The second installation is a compact polishing machine standing on a table. Both machines are measured on force transducers, allowing the transmitted power to be calculated from Eq. (14). The spectral averaged data in third-octave bands is plotted in Fig. 8 together with the unaveraged data in three narrow frequency regions. In Fig. 8, the complete transmitted power and the equal-order approximation show a high degree of similarity in magnitude and signature for both installations. These results corroborate the findings from the Monte Carlo simulations mentioned above. 21 (a) 10-6 -8 W 10 -10 10 -12 10 -14 10 10 100 1000 f -6 10 -8 10 -10 10 10 10 -10 -10 10 -12 10 -12 W 10 -8 10 -12 10 -14 -14 40 f 50 10 -16 400 f 500 10 4000 f 4100 (b) 10-6 -8 W 10 -10 10 -12 10 -14 10 10 100 1000 f -8 10 -10 10 -12 10 10 10 -10 -11 10 -13 10 -12 W 10 -9 10 -14 10 -14 -15 40 f 50 10 -16 400 f 500 10 4000 f 4100 Figure 8: Third-octave band spectral averaged and narrow band unaveraged transmitted power for a tumble dryer installation: (a) tumble dryer installation; (b) polishing machine installation. —, complete formulation; · · · , equal-order approximation 22 In Ref. [69], four conditions are investigated that can potentially lead to a strengthening of the cross-order terms. From the theoretical analyses supported by numerical and experimental studies, however, a significant strengthening of the cross-order terms is found to be improbable in practice. 4.4. Summary The cross-order terms are found to be related to the spatial dependence of point and transfer mobilities as well as the distribution of the force orders. The point and transfer mobilities are found to be dependent on the location along the interface at intermediate frequencies for plate-like structures and intermediate and high frequencies for frame-like structures. Significant variations of the force orders are found to occur at low frequencies only. The resultant importance of the cross-order terms is visible in wide frequency regions, but can be rendered insignificant on average. Hence, they can be neglected with good approximation, although large misinterpretations can result at certain frequencies. The general applicability of interface mobilities for structure-borne sound source characterization thereby is confirmed. 5. Numerical stability of interface mobilities With regard to an improved numerical stability resulting from the circumvented matrix inversion, a series of source-receiver installations are studied in the present section. As a measure of the numerical stability of an approach, the percentage of negative values of the transmitted power and the real part of the source descriptor can be used. Such negative values indicate a power flow from the passive receiver structure to the active source structure and therefore are unphysical. In Tab. 5, the percentage of negative values of the transmitted power from Eq. (11) is compared with that of the matrix formulation [43] Wmf i 1 h T −1∗ ∗ −1T T YR (YS + YR ) vF S . = Re vF S (YS + YR ) 2 (15) Furthermore, the numerical stability of the source descriptor from Eq. (9) is compared with that of the characteristic power [2] 1 Smf = vFT S YS−1∗ vF∗ S . 2 23 (16) laboratory source installation tumble dryer installation washing machine installation kitchen fan installation polishing machine installation 10 Hz ≤ f < 100 Hz 100 Hz ≤ f < 1 kHz 1 kHz ≤ f ≤ 5 kHz 10 Hz ≤ f < 100 Hz 100 Hz ≤ f < 1 kHz 1 kHz ≤ f ≤ 5 kHz 10 Hz ≤ f < 100 Hz 100 Hz ≤ f < 1 kHz 1 kHz ≤ f ≤ 5 kHz 10 Hz ≤ f < 100 Hz 100 Hz ≤ f < 1 kHz 1 kHz ≤ f ≤ 5 kHz 10 Hz ≤ f < 100 Hz 100 Hz ≤ f < 1 kHz 1 kHz ≤ f ≤ 5 kHz Wmf < 0 W < 0 Re[Smf ] < 0 Re[S] < 0 24 % 14 % 86 % 83 % 0% 0% 9% 2% 0% 0% 0% 0% 27 % 13 % 2% 0% 0% 0% 2% 0% 0% 0% 31 % 39 % 32 % 30 % 0% 0% 0% 0% 0% 0% 0% 0% 45 % 59 % 15 % 1% 9% 0% 0% 0% 0% 0% 18 % 22 % 40 % 38 % 26 % 10 % 62 % 16 % 0% 0% 8% 0% 0% 0% 5% 1% Table 1: Percentage of negative values of the transmitted power and the real part of the source descriptor for a few source-receiver installations. Except for the laboratory source which has a continuous connection to the receiver, the source-receiver installations under investigation have four contact points, see Ref. [66]. As shown in Tab. 5, an improved numerical stability of the interface mobility approach in comparison with the matrix formulation is observed at small and intermediate frequencies. At high frequencies, the differing results do not allow for an indication of a certain trend. It can furthermore be surmised that measurement errors can lead to a high percentage of negative power values even if no matrix inversion is applied. 6. Concluding remarks The interface mobility approach offers a scheme for structure-borne sound source characterization where a single continuous interface is considered between a source and a receiver structure. By means of a spatial Fourier decomposition, the source-receiver system can be treated in terms of its Fourier orders. The applicability of interface mobilities for source characterization 24 depends on the admissibility of neglecting the coupling between different orders. It is demonstrated that such a cross-order coupling can be neglected with good approximation, thus yielding a physical transparency that allows for low-noise product design. The gained physical insight is accompanied with a formal simplicity similar to the single-point and single component case which enables a straightforward calculation of the transmitted power, the vibration amplitude along the interface and the source descriptor and coupling function. For the multi-point case, moreover, the applicability of fast Fourier transform algorithms for the calculation of the interface mobilities as well as the force and velocity orders facilitates short computation times. With the confirmation of the general applicability of interface mobilities for source characterization, the practicability of the approach remains to be investigated. The practicability of the concept of interface mobilities is primarily determined by the number of orders that are required for a proper resolution in the intermediate and upper frequency regions. In Ref. [66], a trend is observed where the contribution of higher orders than the zero and first orders tend to be insignificant for four-point installations. However, there still is a need for a general clarification of the influence and significance of higher-order terms. Provided that the practicability of the interface mobility approach can be verified, the findings of the present work yield an approach that allows a reduction of the complex structure-borne sound sources into a few physically comprehensible quantities. Hence, the source descriptor can be studied separately for each order with the corresponding coupling function. However, a significant discrepancy is present between the theoretical and mathematical complexity of the concept of interface mobilities and the formal and physical simplicity of the outcome. It would therefore be convenient to develop a software that handles the processing of the input data and illustrates the results by means of animations. The interface mobility approach presented in such a format is expected to be valuable for the manufacturers and acoustic consultancies. At this stage of development, the required input variables for the concept of interface mobilities are the complex and frequency dependent source and receiver mobility matrices and either the free velocity or blocked force vector of the source for all contact points. In analogy with the Nyquist criterion, the order zero can possibly be obtained from the data at merely two contact points. In order to minimize the required measurement or simulation work, 25 therefore, a potential research task is to study the applicability of reduced data sets for the interface mobility approach. The aim of such a study would be to develop a concept of interface mobilities that includes a measurement method which lies within the capabilities of the manufacturing industry. An alternative approach has recently been proposed by Moorhouse and Elliott, where it is argued that a simplified measurement method is more likely to result in a significant loss of accuracy than a simplified presentation of the data, see Ref. [70]. From the observation that manufacturers tend to outsource the required measurements, it is suggested to put the emphasis on the development of the most accurate measurement method rather than focusing on the introduction of simplifications. The target group of such advanced measurement methods then no longer is the manufacturing industry but the well schooled consultancies and testing laboratories instead. Subsequently, the acquired data remains to be processed and viewed in a way yielding a simplified presentation that is suitable for the manufacturer. As mentioned in Ref. [1], the internal source mechanisms of structureborne sound sources are commonly assumed to be invariant. Hence, the free velocity of the source is treated to be applicable for describing the source activity in the installed condition. However, there has been increasing evidence, that this is not always granted. In a recent study by Wahi and Petersson on a laboratory source consisting of a plate excited by a shaker, the source activity described by the velocity of the freely suspended source is found to increase when connected to a receiver. Furthermore, comparisons of a set of practical source-receiver installations revealed substantial discrepancies between the transmitted power based on the source free velocity and that calculated from the contact forces in the installed condition, see Ref. [66]. A way of treating structure-borne sound sources with source mechanisms that are dependent on the receiver structure could possibly be constituted by indirect measurement methods such as those discussed in Sections 2.1.2 and 2.1.3. Such methods allow the extraction of the source activity in an environment similar to or directly in the targeted installation. Although the obtained source activity is then applicable for that particular installation, the question remains, to what extent it also applies for other receiver structures. A detailed and thorough investigation of the invariance of source mechanisms involving practical sources would therefore greatly contribute to the understanding of sources of structure-borne sound. 26 Acknowledgements The authors gratefully acknowledge the financial support received from the German Research Foundation (DFG) through grant PE 1155/6-1. Appendix A. Nomenclature Symbols: C Cf Cf,p e f F F̂q j kB kp , kq L0 p, q Q r0 s s0 S Sp v v̂p W x y Y Ŷpq Ŷp−p interface circumference [m] coupling function [ ] coupling function order [ ] exponential function [ ] frequency [1/s] force distribution [N/m] force order [N/m] complex number [ ] bending wave number [1/m] interface numbers [1/m] half the diagonal of a rectangular interface [m] order numbers [ ] complex power [Nm/s] interface radius [m] response interface coordinate [m] excitation interface coordinate [m] source descriptor [Nm/s] source descriptor order [Nm/s] velocity [m/s] velocity order [m/s] transmitted power [Nm/s] Cartesian coordinate [m] Cartesian coordinate [m] mobility [m/(Ns)] interface mobility [m/(Ns)] equal-order interface mobility [m/(Ns)] Indices: BS blocked source 27 FS int mf R S freely suspended source integration variable matrix formulation receiver source Operators: (. . .)∗ (. . .)−1 |(. . .)| ^(. . .) Re[(. . .)] (. . .)T complex conjugate inverse magnitude phase real part transpose References [1] BAT Petersson & BM Gibbs. Towards a structure-borne sound source characterization. Applied Acoustics, 61:325–343, 2000. [2] AT Moorhouse. On the characteristic power of structure-borne sound sources. Journal of Sound and Vibration, 248:441–459, 2001. [3] MHA Janssens, JW Verheij & T Loyau. Experimental example of the pseudo-forces method used in characterization of a structure-borne sound source. Applied Acoustics, 63:9–34, 2002. [4] MM Späh & BM Gibbs. Reception plate method for characterisation of structure-borne sound sources in buildings: Assumptions and application. Applied Acoustics, 70:361–368, 2009. [5] AT Moorhouse, AS Elliott & TA Evans. In situ measurement of the blocked force of structure-borne sound sources. Journal of Sound and Vibration, 325:679–685, 2009. [6] European Standard EN 12354-5. Building acoustics – Estimation of acoustic performance of buildings from the performance of elements – Part 5: Sound levels due to the service equipment, 2009. [7] European Standard EN 15657-1. Acoustic properties of building elements and of buildings – Laboratory measurement of airborne and structure borne sound from building equipment – Part 1: Simplified cases 28 where the equipment mobilities are much higher than the receiver mobilities, taking wirlpool baths as an example, 2009. [8] B Gibbs. Granularity in structure-borne sound source characterisation. Noise and Vibration: Emerging Methods, 2009. Oxford, UK. [9] RA Fulford & BM Gibbs. Structure-borne sound power and source characterization in multi-point-connected systems, part 1: Case studies for assumed force distributions. Journal of Sound and Vibration, 204:659–677, 1997. [10] J-M Mondot & BAT Petersson. Characterization of structure-borne sound sources: The source descriptor and the coupling function. Journal of Sound and Vibration, 114:507–518, 1987. [11] BAT Petersson. Structure-borne sound source characterization. International Congress on Sound and Vibration, 10:1751–1765, 2003. Stockholm, Sweden. [12] International Standard ISO9611. Acoustics – Characterization of structure-borne sound with respect to sound radiation from connected structures – Measurement of velocity at the contact points of machinery when resiliently mounted, 1996. [13] G Pavić & AS Elliott. Structure-borne sound characterization of coupled structures – Part I: Simple demonstrator model. Journal of Vibration and Acoustics, 132, 2010. [14] G Pavić & AS Elliott. Structure-borne sound characterization of coupled structures – Part II: Feasibility study. Journal of Vibration and Acoustics, 132, 2010. [15] G Pavić. Noise sources and noise synthesis. Inter-Noise, 08, 2008. Shanghai, China. [16] A Elliott, A Moorhouse & G Pavić. Characterisation of structureborne sound source using independent and in-situ measurement. International Congress on Acoustics, 19, 2007. Madrid, Spain. [17] A Elliott & AT Moorhouse. Characterization of structure-borne sound sources from measurement in-situ. Proceedings Acoustics’08, 2008. Paris, France. 29 [18] AS Elliott & AT Moorhouse. Characterization of vibration sources in-situ. Noise and Vibration: Emerging Methods, 2009. Oxford, UK. [19] BM Gibbs, N Qi & AT Moorhouse. A practical characterization for vibro-acoustic sources in buildings. Acta Acustica united with Acustica, 93:84–93, 2007. [20] J Lu, B Louvigne, JC Pascal & J Tourret. The perforated reception plate, a practical method for the characterization of structure-borne noise emitted by small equipments. Inter-Noise, 90:217–220, 1990. Göteborg, Sweden. [21] J Tourret & L Gavric. Numerical study of the reverberant reception plate method for structure-borne noise characterization of small compact machines. Inter-Noise, 94:615–620, 1994. Yokohama, Japan. [22] M Villot. Characterization of building equipment. Applied Acoustics, 61:273–283, 2000. [23] MM Späh, BM Gibbs & H-M Fischer. Measurement of structureborne sound power of mechanical installations in buildings. International Congress on Sound and Vibration, 11:3377–3384, 2004. St. Petersburg, Russia. [24] BM Gibbs, R Cookson & N Qi. Vibration activity and mobility of structure-borne sound sources by a reception plate method. Journal of the Acoustical Society of America, 123:4199–4209, 2008. [25] T ten Wolde & J Verheij. Practical quantities for the characterization of structure-borne sound sources. Inter-Noise, 88:449–454, 1988. Avignon, France. [26] A Koopman, HJ Martin & CMJ Siebesma. Characterization of structure-borne sound sources in dwellings. Inter-Noise, 94:637–640, 1994. Yokohama, Japan. [27] M Koyasu, H Ohkawa, Y Muraishi & T Hiramatsu. Method for measurement of vibromotive force generated by machinery and equipment installed in buildings. Inter-Noise, 85:653–656, 1985. Munich, Germany. 30 [28] T Hiramatsu, H Ohkawa & M Koyasu. Determination of vibromotive force generated by machinery and equipment and prediction of structureborne noise in buildings. Inter-Noise, 86:619–622, 1986. Cambridge, USA. [29] K Ishii, T Hiramatsu, H Ohkawa & M Koyasu. Laboratory determination of vibromotive force and structure-borne noise generated by machinery in building services. Inter-Noise, 87:607–610, 1987. Beijing, China. [30] SH Yap & BM Gibbs. Structure-borne sound transmission from machines in buildings, part 1: Indirect measurement of force at the machine-receiver interface of a single and multi-point connected system by a reciprocal method. Journal of Sound and Vibration, 222:85–98, 1999. [31] SH Yap & BM Gibbs. Structure-borne sound transmission from machines in buildings, part 2: Indirect measurement of force and moment at the machine-receiver interface of a single-point connected system by a reciprocal method. Journal of Sound and Vibration, 222:99–113, 1999. [32] JW Verheij. Inverse reciprocity for machinery noise source characterization and sound path quantification. International Congress on Sound and Vibration, 4:679–704, 1996. St. Petersburg, Russia. [33] JW Verheij, MHA Janssens & PJG Charlier. Using pseudoforces for characterization of structure-borne sound sources. Inter-Noise, 95:559–562, 1995. Newport Beach, CA, USA. [34] MHA Janssens, CM Langeveld & JW Verheij. Generalization of the pseudo-forces method for characterizing structure-borne sound sources. Inter-Noise, 97:705–708, 1997. Budapest, Hungary. [35] JW Verheij. Inverse and reciprocity methods for machinery noise source characterization and sound path quantification, Part 1: Sources. International Journal of Acoustics and Vibration, 2:11–20, 1997. [36] MHA Janssens & JW Verheij. Two applications of the pseudo-forces method for characterizing the source strength for structure-borne sound. Inter-Noise, 96:1335–1338, 1996. Liverpool, UK. 31 [37] MHA Janssens & JW Verheij. A pseudo-forces methodology to be used in characterization of structure-borne sound sources. Applied Acoustics, 61:285–308, 2000. [38] JW Verheij. Inverse and reciprocity methods for machinery noise source characterization and sound path quantification, Part 2: Transmission paths. International Journal of Acoustics and Vibration, 2:103– 112, 1997. [39] M Ohlrich & A Crone. An equivalent force description of gear-box sources applied in prediction of structural vibration in wind turbines. Inter-Noise, 88:479–484, 1988. Avignon, France. [40] S Laugesen & M Ohlrich. The vibrational source strength descriptor using power input from equivalent forces: A simulation study. Acta Acustica, 2:449–459, 1994. [41] H-Y Lai. Alternative test methods for measuring structure-borne sound power. Inter-Noise, 06, 2006. Honolulu, Hawaii, USA. [42] AT Moorhouse & BM Gibbs. Relationship between the characteristic power of structure-borne sound sources and their emission when installed. Euro-Noise, 98:389–394, 1998. Munich, Germany. [43] L Cremer, M Heckl & BAT Petersson. Structure-borne sound. Springer Verlag, Berlin, 3rd edition, 2005. [44] AT Moorhouse & BM Gibbs. Measurement of the characteristic power of structure-borne sound sources. International Congress on Sound and Vibration, 6:2161–2168, 1999. Copenhagen, Denmark. [45] J-M Mondot. The source descriptor and the coupling function: Tools for the prediction of structure-borne sound transmission and source characterization. Chalmers University of Technology, Department of Building Acoustics, Report F87-01, 1987. Göteborg, Sweden. [46] BAT Petersson & BM Gibbs. Some results of structural acoustic source characterization using the source descriptor concept. Inter-Noise, 90:209–212, 1990. Göteborg, Sweden. 32 [47] BAT Petersson & J Plunt. On effective mobilities in the prediction of structure-borne sound transmission between a source structure and a receiving structure, part 1: Theoretical background and basic experimental studies. Journal of Sound and Vibration, 82:517–529, 1982. [48] BAT Petersson & J Plunt. On effective mobilities in the prediction of structure-borne sound transmission between a source structure and a receiving structure, part 2: Procedures for the estimation of mobilities. Journal of Sound and Vibration, 82:531–540, 1982. [49] J-M Mondot. Structure-borne sound source characterization, part 3: Multi-point installed source structure. Chalmers University of Technology, Department of Building Acoustics, Report F86-04, 1986. Göteborg, Sweden. [50] BAT Petersson & BM Gibbs. Use of the source descriptor concept in studies of multi-point and multi-directional vibrational sources. Journal of Sound and Vibration, 168:157–167, 1993. [51] RA Fulford & BM Gibbs. Structure-borne sound power and source characterization in multi-point-connected systems, part 3: Force ratio estimates. Journal of Sound and Vibration, 225:239–282, 1999. [52] BM Gibbs & AT Moorhouse. Case studies of machine bases as structure-borne sound sources in buildings. International Journal of Acoustics and Vibration, 4:125–133, 1999. [53] RA Fulford & BM Gibbs. Structure-borne sound power and source characterization in multi-point-connected systems, part 2: About mobility functions and free velocities. Journal of Sound and Vibration, 220:203–224, 1999. [54] RJ Pinnington & DCR Pearce. Multipole expansion of the vibration transmission between a source and a receiver. Journal of Sound and Vibration, 142:461–479, 1990. [55] RJ Pinnington, RA Fulford & M Terry. The use of polar mobilities for predicting the coupled response of machine mounting systems. InterNoise, 96:1587–1592, 1996. Liverpool, UK. 33 [56] AT Moorhouse & BM Gibbs. Simplified characterisation of multiple point excited structures using mobility matrix eigenvalues and eigenvectors. Acta Acustica united with Acustica, 84:843–853, 1998. [57] S Jianxin, AT Moorhouse & BM Gibbs. Towards a practical characterization for structure-borne sound sources based on mobility techniques. Journal of Sound and Vibration, 185:737–741, 1995. [58] L Ji, BR Mace & RJ Pinnington. A power mode approach to estimating vibrational power transmitted by multiple sources. Journal of Sound and Vibration, 265:387–399, 2003. [59] L Ji, BR Mace & RJ Pinnington. Estimation of power transmission to a flexible receiver from a stiff source using a power mode approach. Journal of Sound and Vibration, 268:525–542, 2003. [60] M Ohlrich & C Larsen. Surface and terminal source power for characterization of vibrational sources at audible frequencies. Inter-Noise, 94:633–636, 1994. Yokohama, Japan. [61] M Ohlrich. A simple structural power method for determining the vibratory strength of machinery sources. Euro-Noise, 98:383–388, 1998. Munich, Germany. [62] M Ohlrich. Structure-borne sound sources and their power transfer. Inter-Noise, 01, 2001. The Hague, Holland. [63] M Ohlrich & T Saar. Characterising compact machine sources of vibration by including terminal cross-coupling for predicting transmission of structure-borne sound power. Noise and Vibration: Emerging Methods, 2009. Oxford, UK. [64] BAT Petersson. An experimental technique for dynamic characteristics at large structural interfaces. International Congress on Sound and Vibration, 6:2175–2182, 1999. Copenhagen, Denmark. [65] JO Smith III. Mathematics of the discrete Fourier transform (DFT). BookSurge Publishing, Online Book, http://www.dsprelated.com/dspbooks/mdft/, 2nd edition, 2007. 34 [66] HA Bonhoff. The influence and significance of cross-order terms in interface mobilities for structure-borne sound source characterization, 2010. PhD Thesis, Institute of Fluid Mechanics and Engineering Acoustics, Technische Universität Berlin, Germany. [67] HA Bonhoff & BAT Petersson. The distribution of force orders on structure-borne sound source interfaces for the concept of interface mobilities. Proceedings of the Institute of Acoustics, 29 Part 5:74–85, 2007. [68] JE Gentle. Random Number Generation and Monte Carlo Methods. Springer-Verlag, 2nd edition, 1998. [69] HA Bonhoff & BAT Petersson. The influence of cross-order terms in interface mobilities for structure-borne sound source characterization. Journal of Sound and Vibration, 329:3280–3303, 2010. [70] A Moorhouse & A Elliott. Application of an in situ measurement method for characterisation of structure-borne sound generated by building-mounted turbines. Inter-Noise, 10, 2010. Lisbon, Portugal. 35
 0
0
advertisement
Related documents



![Abstract and bio [DOCX 15.89KB]](http://s2.studylib.net/store/data/015014999_1-2bf3e21124e6238201078baee73128ea-300x300.png)
Download
advertisement
Add this document to collection(s)
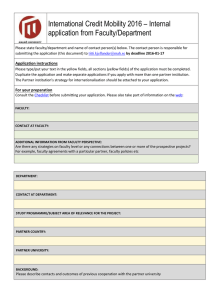
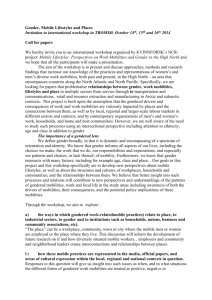
You can add this document to your study collection(s)
Sign in Available only to authorized usersAdd this document to saved
You can add this document to your saved list
Sign in Available only to authorized users