sensorless control of bldc motor using third harmonic back emf
advertisement

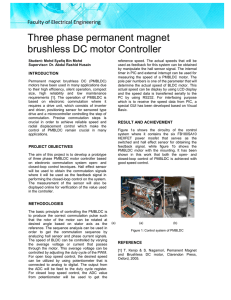
International Journal of Industrial Electronics and Electrical Engineering, ISSN: 2347-6982 Volume- 2, Issue- 1, Jan.-2014 SENSORLESS CONTROL OF BLDC MOTOR USING THIRD HARMONIC BACK EMF 1 ASHISH P.R, 2VINCENT G 1 2 M-Tech scholar Industrial Drives and Control Govt. RIT, Kottayam Assistant professor Electrical Engineering Department Govt. RIT, Kottayam Email: ashishpalakkadan@gmail.com, Vincent@rit.ac.in Abstract- This paper presents particular methods for deployment of the sensorless Permanent Magnet Brushless DC (PM BLDC) motor drive system. The typical trapezoidal waveform of the motor internal voltages (or back emf) contains a fundamental and higher order frequency harmonics. In particular, the third harmonic component is extracted from the stator phase voltages while the fundamental and other polyphase components are eliminated via a simple summation of the three phase voltages. The resulting third harmonic signal keeps a constant phase relationship with the rotor flux for any motor speed and load condition, and is practically free of noise that can be introduced by the inverter switching, making this a robust sensing method. In contrast with indirect sensing methods based on detection of the back-emf signal that require heavy filtering, the third harmonic signal needs only a small amount of filtering to eliminate the switching frequency and its side bands. I. EMF zero crossing is sensed with respect to the negative dc bus potential. In [3], Kim and Ehsani define a function depending on the measured voltages, currents, and the derivative of the currents, which indicates the switching instants. After prepositioning, Kim and Ehsani [3] advance the switching pattern by 60 electrical degrees and let their sensor less algorithm take over. Since their functions are dependent on the computation of derivatives of currents, the method requires digital implementation and could be affected by sensor noise. Detecting the free-wheeling diode conduction in the open phase gives the zero-crossing point of the back EMF waveform [4]. This approach of rotor-position sensing works over a wide speed range, especially at lower speed. The main drawback of this scheme is the requirement of six additional power supplies for the comparator circuits to detect current flowing through the free-wheeling diode. Integrating the back EMF waveform of the unexcited phase is another method to extract the position information for the phase commutation [5]. Integration starts when zero crossing of the back EMF occurs and the integration stops when the threshold set value is reached, which gives the commutation instant. Frequency independent phase shifter is proposed by Jung and Ha [8] for sensorless control of BLDC motor, which can shift the zero-crossing point of input signal with a specified phase delay. However, direct commutation instant detection technique proposed in [6] and [7] lacks this flexibility to advance the commutation instant, which is possible to implement using the back EMF zero-crossing detection Techniques. An extended Kalman filter estimator for a brushless dc motor has been developed by Jung and Ha [9] for speed and rotor position estimation. An obstacle to applying the extended Kalman filter algorithm to rotor position estimation is the need to set appropriate values for the covariance matrix parameters, which reflect the uncertainties in modeling and INTRODUCTION PERMANENT MAGNET (PM) motors have been widely used in a variety of applications in industrial automation and consumer appliances because of their higher efficiency and power density. Brushless dc (BLDC) motors, with their trapezoidal electromotive force (EMF) profile, which requires six discrete rotor position information for the inverter operation. These are typically generated by Hall-effect switch sensors placed within the motor. However, it is a well-known fact that these sensors have a number of drawbacks. They increase the cost of the motor and need special mechanical arrangements to be mounted. Further, Hall sensors are temperature sensitive, and hence limit the operation of the motor. They could reduce system reliability because of the extra components and wiring. Furthermore, sensorless control is the only reliable way to operate the motor for applications in harsh environments. The BLDC motor without position and speed sensors has attracted wide attention and many papers have reported work on this. These methods are based on, using back EMF of the motor [1]–[3], detection of the conducting state of freewheeling diode in the unexcited phase [4], back EMF integration method [5].Back EMF estimation methods typically rely on the zero crossing detection of the EMF waveform. The technique of estimating back EMF by sensing the terminal voltages with respect to a virtual neutral point is proposed in [1]. The neutral point will not be stable during pulse width modulation (PWM) switching. Low pass filters have been used to eliminate the higher harmonics and to convert the terminal voltages into triangular waveform signals. Delay is introduced in the sensed signal due to heavy filtering, which also varies with the operating speed. Therefore, this method is well suited only for a narrow speed range. Indirect back EMF sensing technique is proposed in [2] without the need of neutral or virtual neutral potential. The back Sensorless Control of BLDC Motor Using Third Harmonic Back EMF 35 International Journal of Industrial Electronics and Electrical Engineering, ISSN: 2347-6982 Volume- 2, Issue- 1, Jan.-2014 measurements. The parameter values are often chosen by trial and error. Advancing the commutation instant increases the torque production particularly at high speed operation of BLDC motor as proposed and analyzed by authors in [10] and [11]. This paper proposes a simple and reliable method for the sensorless operation using the third harmonic back EMF and back EMF of any one phase . In this paper, the third harmonic back EMF is extracted directly from the phase voltages. The method does use back EMF zero crossing for the commutation. Switching pulses is generated from the zero crossing of third harmonic back EMF. Unlike the method described in [3], this scheme is easy to implement.The organization of this paper is as follows. Section II describes operation principle of BLDC Motor. Section III describes proposed third harmonic method. Section IV presents the simulation results of the proposed method and Section V presents the conclusion. the motor, the inverter commutates the current every 60° according to the rotor position given by hall sensors or sensorless method and thus the motor rotates once through the six commutation steps. The conducting interval for each phase is 120° and only two phases are conducted at any time, leaving the third phase floating. Fig. 2 shows the phase current and commutation sequence using hall sensors. II. III. Fig. 2. Phase current and commutation sequence OPERATION PRINCIPLE OF BLDC MOTOR PROPOSED THIRD HARMONICS METHOD The sensorless control proposed in this paper is based on the estimation of the air gap flux via the third harmonic component of the stator phase voltages. The use of the stator third harmonic voltage for the PM BLDC motor discussed in this paper is based on the symmetrical three phases Y-connected motor with air gap flux distribution. The summation of the threestator phase voltages results in the elimination of all poly phase components and all the characteristic harmonics components. The resulting sum is dominated by the third harmonic component, maintaining constant phase displacement with the fundamental air gap voltage for any load and speed. Fig. 3 presents the idealized air gap flux density distribution for the PM BLDC motor with surface mounted magnets. The resultant air gap flux has a dominant third harmonic component linked to the stator windings, inducing a third harmonic component in each one of the phases. The summation of the three-stator phase voltages only results in the third harmonic plus other high frequency components. A general BLDC motor has three phase stator windings and is driven by an inverter which constitutes of six switches. Fig. 1 shows the equivalent circuit of am Y connection BLDC motor and the inverter topology. Fig. 1. BLDC motor and inverter block diagram Assuming that the stator resistance and inductance of all the windings are equal, the voltage equation of a BLDC motor can be expressed as (1) where Vx, ix, and ex(x=a,b,c) denote the terminal voltage, the phase current, and the phase BEMF respectively. R is a stator resistance and L is a stator inductance. Vn is the neutral voltage of a Y connection motor The electromagnetic torque equation is given by (2) Where Te denotes the torque and ωm is the rotor speed. Unlike a BLAC motor, a BLDC motor is powered by rectangular current. In order to operate Fig. 3. Air gap flux distribution and its fundamental and third harmonic components Fig. 4 depicts the motor internal voltage corresponding to back-EMF, third harmonic signal, Sensorless Control of BLDC Motor Using Third Harmonic Back EMF 36 International Journal of Industrial Electronics and Electrical Engineering, ISSN: 2347-6982 Volume- 2, Issue- 1, Jan.-2014 integral signal, and commutation signal. The zero crossings of the third harmonic component occur at 60 electrical degrees, exactly at every desired current commutation instant. The integrator of third harmonic introduces a phase shift of π2 from the zero crossings of the third harmonic. Finally the detected zero crossing of the integrator output generates required phase commutation timing signals. Fig. 6. Torque Wave form Fig. 4. Commutation signal using third harmonic signals IV. Fig. 7. Current Wave form SIMULATION RESULTS CONCLUSION The proposed sensorless method is simulated in MATLAB/SIMULINK software. The motor parameters used for simulation and hardware implementation are given in Table I. The informative results are displayed in Fig. 5 through to Fig. 7. A simple technique to detect third harmonic back EMF zero crossings for a BLDC motor using the phase voltages is proposed. The control method of the sensorless PM BLDC Motor is based on the detection and processing of the stator third harmonic voltage component. The proposed control method can operate over a wide speed range, using the third harmonics voltage of the stator voltage and proposed position detection circuit. In addition, the reduction in size achieved by eliminating the rotor position sensor and the encoder may be critical in many applications. Simulation results are shown which validate the suitability of the proposed method TABLE I BLDC MOTOR PARAMETERS REFERENCES [1] [2] [3] [4] [5] Fig. 5. Speed Wave form [6] K. Iizuka,H.Uzuhashi, M. Kano, T. Endo, andK.Mohri, “Microcomputer control for sensorless brushless motor,” IEEE Trans. Ind. Appl., vol. IA-21, no. 4, pp. 595–601, May/Jun. 1985. J. Shao, D. Nolan,M. Teissier, and D. Swanson, “A novelmicrocontrollerbased sensorless brushless DC (BLDC) motor drive for automotive fuel pumps,” IEEE Trans. Ind. Appl., vol. 39, no. 6, pp. 1734–1740, Nov./Dec. 2003. T.-H. Kim and M. Ehsani, “Sensorless control of BLDC motors from near-zero to high speeds,” IEEE Trans. Power Electron., vol. 19, no. 6, pp. 1635–1645, Nov. 2004. S. Ogasawara and H. Akagi, “An approach to position sensorless drive for brushlessDCmotors,” IEEE Trans. Ind. Appl., vol. 27, no. 5, pp. 928–933, Sep./Oct. 1991. R. C. Becerra, T. M. Jahns, and M. Ehsani, “Fourquadrant sensorless brushless ECM drive,” in Proc. IEEE APEC, Mar. 1991, pp. 202–209.Ind. Electron., vol. 53, no. 2, pp. 352–362, Apr. 2006. H.-C. Chen and C.-M. Liaw, “Current-mode control for Sensorless Control of BLDC Motor Using Third Harmonic Back EMF 37 International Journal of Industrial Electronics and Electrical Engineering, ISSN: 2347-6982 [7] [8] sensorless BLDCM drive with intelligent commutation tuning,” IEEE Trans. Power Electron., vol. 17, no. 5, pp. 747–756, Sep. 2002. C.-H. Chen and M.-Y. Cheng, “Newcost effective sensorless commutation method for brushless dc motors without phase shift circuit and neutral voltage,” IEEE Trans. Power Electron., vol. 22, no. 2, pp. 644–653, Mar. 2007. D.-H. Jung and I.-J. Ha, “Low-cost sensorless control of brushless DC motors using a frequency-independent phase shifter,” IEEE Trans. Power Electron., vol. 15, no. 4, pp. 744–752, Jul. 2000. [9] [10] [11] Sensorless Control of BLDC Motor Using Third Harmonic Back EMF 38 Volume- 2, Issue- 1, Jan.-2014 B. Terzic and M. Jadric, “Design and implementation of the extended Kalman filter for the speed and rotor position estimation of brushless DC motor,” IEEE Trans. Ind. Electron., vol. 48, no. 6, pp. 1065–1073, Dec. 2001. T. M. Jahns and W. L Soong, “Pulsating torque minimization techniques for permanent magnet AC motor drives-a review,” IEEE Trans. Ind. Electron., vol. 43, no. 2, pp. 321–330, Apr. 1996. C.-G. Kim, J.-H. Lee, H.-W. Kim, and M.-J. Youn, “Study on maximum torque generation for sensorless controlled brushless DC motor with trapezoidal back EMF,” IEE Proc.-Electr. Power Appl., vol. 152, no. 2, pp. 277–291, Mar. 2005.