Receiving, Filtering and Amplifying Earthquake Signals
advertisement

International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 3, Issue 12, December 2013)
Receiving, Filtering and Amplifying Earthquake Signals
Hosseyn Farazar1, Parviz Amiri2
1
Ms.C. student, 2Assist Professor, Faculty of Electrical and Computer Engineering, Shahid Rajaee Teacher Training University,
Tehran, Iran
Also, waves with high frequency are absorbed by the
earth crust; but, waves with low to very low frequencies are
not absorbed and penetrate into the ground surface. Today,
different systems have been developed for detecting surface
waves of earthquake or vibrations or motions of the ground
surface. Earthquake waves can be sensed and detected by
different systems. Earthquake waves are divided into two
classes in terms of their motion inside or on the earth
surface: body waves and surface waves.
Abstract— Humans have always required methods for
guessing earthquake before its occurrence and minimizing its
potential damage resulting with suitable arrangements.
Electromagnetic waves which are propagated before
earthquake occurrence inside the ground in epicenter of
earthquake have high amplitude and broad frequency range.
For this purpose, it is necessary to filter and amplify
earthquake signals using electronic circuit after receiving
them. One of the common methods is to use earthquake
alarms. Therefore, electric circuits relating to amplifying,
filtering and optical isolation were presented and studied here.
A. Body Waves
Waves, which propagate through the interior of a body.
For the Earth, there are two types of seismic body waves:
(1) Compressional or longitudinal (P wave) and (2) Shear
or Transverse (S wave). [1]
P Wave: the primary body wave; the first seismic wave
detected by seismographs; able to move through both liquid
and solid rock; compressional waves, like sound waves,
which compress and expand matter as they move through
it. [2]
S Wave: secondary body waves that shear, or cut the
rock they travel through sideways at right angles to the
direction of motion; cannot travel through liquid; produce
vertical and horizontal motion in the ground surface. [2]
Keywords— Earthquake sensor, Earthquake Electronic
Circuit, Geophone, Filter, Seismic.
I. INTRODUCTION
Earthquake means sudden and transient motions and
vibrations in the earth that originate from a limited area
from which they are propagated in all directions.
Earthquake is induced by sudden release of energy
accumulated in the crust rocks. This release of energy starts
from points in depth of earth called epicenter of earthquake
and causes vibration of earth by releasing energy as waves
and finally, in case buildings and structures are not
constructed according to principles, destroys them.
Information on the earth plays a main role in many cases.
In geology and earthquake studies, this information is a
way of discovering very important subjects. One of the
very important areas is analysis of such information
exploratory studies about underground tanks and mines.
Electromagnetic waves radiate from their special epicenter.
These waves are greatly absorbed when passing different
layers of the earth crust and increase temperature at the
surface of ground and even air. These waves can cause
anxiety and stress in some animals. Earthquake precursors
are various and have cause-and-effect relations with each
other, among which electromagnetic waves have a special
position. Electromagnetic waves inside the ground have
high amplitude and broad frequency spectrum; but, their
amplitude is gradually reduced due to the passage of
different layers of earth crust.
B. Surface Waves
Waves that move close to or on the outside surface of
the Earth. These are slower than P or S waves, that
propagate along the Earth’s surface rather than through the
deep interior. there are two types of surface waves that
propagate along Earth’s surface: Rayleigh waves (polarized
in the source direction) and Love waves (polarized at right
angles to the source direction). [2, 3 and 4]
Rayleigh Waves: surface waves that move in an elliptical
motion, producing both a vertical and horizontal
component of motion in the direction of wave propagation.
[2]
Love Waves: surface waves that move parallel to the
Earth’s surface and perpendicular to the direction of wave
propagation. [2]
649
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 3, Issue 12, December 2013)
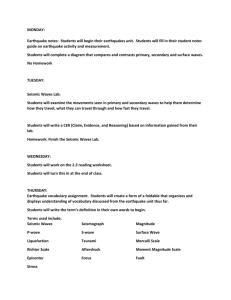
II. DETECTING EARTHQUAKE WAVES
Earthquake alarm acts based on detection of P
nondestructive waves which are propagated from epicenter
of earthquake. Motion speed of P waves is approximately
6.4 km/s (speed of P wave varies depending on the material
of earth layers) and humans are not able to sense them. In
addition, these waves have no destructive effects. As is
known, some animals become aware of the earthquake
occurrence while it is not possible for humans to sense
vibrations and P waves. S wave is very destructive.
Epicenter and depth of earthquake are calculated based on
the difference between reaching time of P and S waves,
which allows alarming or sending instruction in a short
term before reaching of destructive earthquake vibration
(Figure 1). Recently, some systems which predict S waves
using P waves in earthquake-prone countries have been
developed, according to which some measures such as
stopping trains and gas and power flow are taken.
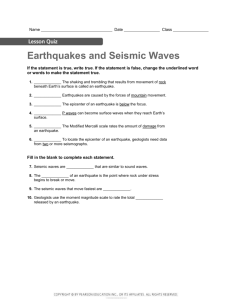
Figure 2: seismograph [7]
Electromagnetic detection (geophones): On land, the
surface moves as a P-wave or S-wave arrives. Generally
reflected signals arrive at steep angles of incidence. Thus
P-waves produce surface motion that is dominantly
vertical. Geophones measure ground motion by converting
motion into electrical signals. Most geophones measure a
single component (vertical), but multiple component ones
are sometimes used. [6]
Figure 1: P and S waves and surface waves on the recorded
seismograph [5]
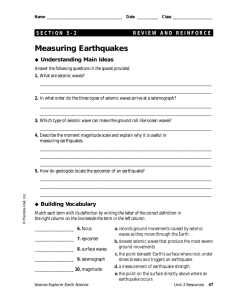
A. Seismic detectors
Mechanical seismometer: Measure lower frequencies
than geophones. Use a stationary mass. Measures motion of
the Earth relative to the mass. Can measure vertical or
horizontal motion. [6]
For earthquake studies a more permanent installation is
usually required. Three components are usually recorded
and the sensor is tuned to detect lower frequencies. Often
the seismometer is placed in a shallow vault to minimize
wind and other forms of noise. [6]
FIGURE 3: TYPICAL CONSTRUCTION OF A GEOPHONE [6]
Hydrophones: Only sensitive to pressure changes so
only P-waves detected. Used in marine surveys. [6]
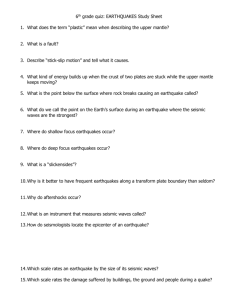
III. VIBRATION SIGNALS OBSERVED USING OSCILLOSCOPE
Signals resulting from small shocks which have been
received from Geophone Sensor (Earthquake sensor) are
shown in the following figures.
650
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 3, Issue 12, December 2013)
Figure 4 represents signals resulting from a relatively
mild shock at 1 m distance from the sensor on the table.
Figure 5 demonstrates a signal in static state. In this figure,
no shock or vibration has occurred and signals are caused
by noise.. The signals which have vibrated the earth in the
world and recorded by the seismograph are given in
Figures 6 and 7.
Receiving (sensor,
amplification,
filter and
impedance
matching)
Controller (ADC
converter, parallel to
series conversion +
rapid alarming
system)
Microcontroller
information
receiving
(MATLAB)
Figure 8: A scheme of this project
In this project, PSPICE 9.2 software was used to work
with analog part and PROTEUS software was used for
simulating its microcontroller part. For receiving signals,
scope.exe software was applied. Considering that
MATLAB software could control the serial port, this
software could be used as well.
Figures 4: Oscilloscopes rang
in 5mV - 50ms
Figures 6: The signal recorded
at the Tabas earthquake
A. Selecting and Designing Amplifier
The first class after sensor, into which the signal entered,
was called preamplifier. This class had two differential
inputs. Preamplifier class performed the following
operations: 1- current to voltage conversion, 2- voltage
amplification and 3- noise reduction.
Two important indices for amplifier of amplitude and
frequency included high input impedance and differential
input. Any increase in source impedance or vibration
sensors caused loss of signal in its transmission line.
Therefore, reduction of source impedance can be useful,
which was performed in two ways: the first method was to
reduce resistance of sensor using a potentiometer or NTC
and the second method was isolation of source impedance
from load impedance hat was done by increasing input
impedance of the amplifier and reducing its output
resistance. Pre-amplification coefficient was considered
below 100 and placed before filter class in order not to
amplify noise signal and not change the signal from its
ordinary form. After filter class, an amplifier was used.
AD620 is a precision instrument amplifier with very
high CMRR (100 db), the gain of which is adjusted only
with an external resistance between bases 1 and 8
(adjustable gain from 1 to 1000); it was used as
preamplifier in this work. Eq. (1) shows gain relation in
terms of resistance [10]:
Figures 5: Oscilloscopes range
in 5mV - 50ms
Figures 7: The signal recorded
at the Bam earthquake
After the signal is collected by the earthquake sensor, it
goes to the initial amplifier; then, it reaches main amplifier
and filters. After passing the main amplifier and filters, it is
transmitted to the next section using an isolator, which
isolates input and output parts. Finally, the signal is
digitalized and sent to a computer. The signal is drawn in
the computer by MATLAB software. Any processing
action such as drawing signal frequency spectrum can be
done in computers.
IV. SIMULATED ELECTRONIC CIRCUIT
This project had two important analog and digital parts.
The analog part included receiving information from
sensor, amplifying and filtering it and improving the signal
for digital part. The digital part in which computer and
microcontroller existed included conversion of analog to
digital signals and then submission of the serial number of
the produced information to the serial port, which was
performed by AVR microcontroller. Finally, the produced
signals were sent to the computer and drawn and stored
using MATLAB software.
(1)
In this regard, gain value increased with decrease of RG.
The table shows necessary resistances for different gains
and also their correspondence with the experimental values.
651
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 3, Issue 12, December 2013)
Table 1:
Values of resistance for different gains in AD620 [10]
For designing this filter, datasheets of ANALOG
DEVICE and NATIONAL Company were extracted.
B. High Pass Filter
R4
7
1000000K
V110u
0
8
2
V+
OUT
RG2
-
5
REF
6
5
0
R5
0
0
V
100K AD620/AD
0
For simulating and analyzing its frequency, a source was
put as sensor in the input and simulated to fulfill demands
of the project. For simulation, pre-amplification class was
focused on.
Considering the papers which have been studied and will
be referred to, measurement was performed as reference
(source). In other words, the sensor moved with the earth
and there was no turbulence-free and stabilized motion
reference. For this reason, it was not possible to directly
measure convection. Seismic waves caused transient
momentums; according to inertial principle, momentum
exists when there is acceleration; this principle
demonstrates that seismic waves should be in the form of
acceleration with which convection can be approximated.
To design filtering, the input values should be known.
According to some papers, it can be said that amplitude and
frequency of seismic signals are very large. However, it is
not possible to measure them using a sensor and circuit.
This issue also holds true for frequency. Frequency bands
can be enhanced from small value of 10-5 to 1 kHz. IN fact,
these values are very high and should generally cover
minimum frequency band of 0.01 to 100 Hz and motion
should also show 1 nm to 10 mm. It is not possible to
create a precision instrument for covering these values;
thus, filters and sensors with different amplitude and
frequency are used.
R2
V2
U3
V3
4
1Vac
0Vdc
+
RG1
V-
3
1
C2
1k
0
-5
0
Figure 9: High pass filter
Since there were unwanted DC components in input
signals such as Emf potential, a high pass filter had to be
used for deleting them. But, seismic signal had nonzero
mean or DC nature and lower cut-off frequency; the system
was slower and had delay in performing its operation which
was DC deletion. Therefore, cut-off frequency was
considered as two values of 0.1 and 0.01 Hz and a shortcircuit state of resistance was also assumed so that the
capacitor could be charged with the desired value and then
the system could perform its duty.
In a low pass filter RC,
; therefore, capacitor
of 15 µF and resistance of 100 kΩ seemed to be suitable.
By selecting standard values, cut-off frequency was
calculated as 0.16 Hz. To have cut-off frequency of 0.16
Hz, it was enough to change resistance to 1 MΩ by putting
a selector.
C. Low Pass Filter
Most components of sensor signal were in the range of
low frequencies; hence, it was necessary to pass a signal
which was recorded and then amplified through low pass
filter to delete the disruptive components. For filtering,
second-order filter was used and, because the highest
attenuation was desirable at urban power frequency of 50
Hz, Q of the circuit was selected to be high. IN fact, it
should be noted that Q of low pass filters and high pass
filters was below 1 while Q of Band pass filter was larger
than 1. The following figure 10 shows the filter with gain
of 1:
TABLE 2
FREQUENCY CONTENT OF SEISMIC SOURCES [6]
652
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 3, Issue 12, December 2013)
To obtain conversion function of this filter, node
equations were written:
(
)
(2)
(3)
(
(2) and (3) →
Figure 10: Low pass filter
V2
5
(
)
)
⁄
( ⁄
)
(4)
V1
V3 -5
V2
0
0
R4
C4
RG2
RG1
330n
1k
U1
7
2
V
1Vac
0Vdc
R2
100K
RG2 8
2
0
V+
+
RG1
OUT
RG2
-
REF
R6
5
3
68k
OS1
OUT
R7
6
68k
+
V+
10u
-
U3
OS2
LM741
1
6
5
R3
V
100k
C3
0
150n
V2
7
V1
3
RG1 1
V-
C2
V-
4
V1
AD620/AD V2
0
4
V1
0
0
0
Figure 12: Pre-Amplifer, Amplifier and Filter circuits
The system characteristic equation was as follows:
(
)
(
)
FOR DESIGNING, BUTTERWORTH FILTER IN WHICH Q IS
0.707 AND CUT-OFF FREQUENCY OF 10 HZ WERE SELECTED.
(5)
Where quality coefficient and cut-off frequency are as
follows:
√
√
(7)
√
{
→
)
→
By selecting standard values
, cut-off frequency was calculated as
10.52 Hz.
Finally, there was a preamplifier with high pass filter,
after which low pass filter to filter frequency of 0.01 Hz to
10 Hz existed. Figure 13 shows the designed circuit for the
analog part.
(6)
√
)
(8)
√
653
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 3, Issue 12, December 2013)
Finally, signal isolation is performed using three major
methods including capacitor isolation, magnetic isolation
and optical isolation.
In capacitor modulation, they modulate the signal by a
high-frequency carrier and transmit it through capacitor
coupling.
V2
-5
0
C1
-5.000V
-10.82mV
330n
-10.84mV
68k
+
V+
V168k
OS1
OUT
R2
3
1Vac
0Vdc
-
OS2
C2
150n
LM741
1
6
V
5
5.000V
100k
0
0
0
R3
V3
5
7
R1
2
V-
4
U1
-5.422mV
0
Figure 11: Filter with the calculated values
60V
50V
40V
30V
20V
10V
0V
100uHz
300uHz
V(U1:OUT)
1.0mHz
3.0mHz
10mHz
30mHz
100mHz
300mHz
1.0Hz
3.0Hz
10Hz
30Hz
100Hz
Figure 14: A scheme of isolated integrated circuit using capacitor
isolation
Frequency
Figure 13: Frequency response of the analog part
In magnetic isolation, isolated transformers are used for
this purpose. Electrical signal is first converted into
magnetic flow and passes through transformer core which
is made of ferrite and is also an electrical insulator and then
is converted into electrical signal in its output. As is
known, one of the problems of isolated transformers is their
low efficiency. On the other hand, transformers face a
problem in terms of frequency function at low frequencies
(characterized by Band pass transformers) and important
components of electroencephalogram signal are also at low
frequencies. To solve this problem, electroencephalogram
signal should be modulated and put at working frequency
of transformer. Then, a demodulator is used for recovering
signal frequency components, which causes high cost in
addition to errors that are faced in modulator and
demodulator system.
D. Isolation
Isolation includes signal isolation, individual isolation
and supply isolation.
Earthquake sensor signal, on which all kinds of
hardware processing are performed in analog board, should
be digitalized by microcontroller for software processing
and digital information is sent to the computer. To transmit
signal from analog to digital boards, their grounds should
be isolated so that noise of digital switching does not to
affect seismo signal. On the other hand, it seems necessary
to use isolator due to issues such as ground loop and
common mode voltage. Electromagnetic fields which are
available in general media (cell phone, radio, WLAN
network) induce voltage in case of passing through a loop.
If resistance of loop is low, high current does not pass,
which is attenuated in the case of interference with signal.
In some cases, it is not inevitable to form such a loop with
ordinary amplifiers. At these times, using isolated
amplifiers cuts the route.
Common mode voltage which has a large value burns
ordinary amplifiers and probably burns precious
equipments afterward. Isolated amplifiers easily tolerate
common voltage up to some kilovolt. Such problems lead
to considerable use of isolated amplifiers in precision
instruments.
isolation signal: Signal isolation is performed such that
electric signal is first converted from the first system into
nonelectrical signal and then passes electrical insulating
signal in the output.
Figure 15: Magnetic isolation
654
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 3, Issue 12, December 2013)
In optical isolation, electrical signal is first converted
into light and then electric signal in output by passing
through transparent medium of electrical insulator. Among
the evident optical isolators are optocouplers and, in this
project, optical isolation was applied. Optocouplers in
electronic packages include optical diodes and optical
transistors. One of the most important specifications of an
optocoupler is CRT specification, which is input to output
current transfer coefficient. In most optical isolators, this
specification is nonlinear, which is one of the main
functional problems of optocouplers.
According to the figure of isolation circuit, current of
, enters optical diode and this diode emits light in
its opposite optical transistor. Since there are equal
resistances in two bases of op-amp on the second side and
voltage of these two bases is also equal, the current which
passes upper transistor also passes lower transistor. This
event is such that current of two optic diodes is equal to
each other; therefore, voltage to resistance ratio of two
optic diodes is equal (Eq. 9):
(9)
Figure 16: Optocoupler isolation
Figure 19: Isolation circuit
To solve this problem, feedback system could be used as
follows:
60mV
40mV
20mV
-0mV
-20mV
-40mV
-60mV
0s
Figure 17: Optocoupler single
0.1s
0.2s
0.3s
0.4s
0.5s
0.6s
0.7s
0.8s
0.9s
1.0s
V(R2:2)
Time
Figure 20: An example of the input signal
In the following figure, diode emits light based on the
passing current and this light collides with base of optical
transistor and induces current in it. Input-output relation is
nonlinear. But, when 2 numbers of these optocouplers
(both of which should be in one electronic package) were
used, the input-output relation was linear as follows:
3.0V
2.0V
1.0V
-0.0V
-1.0V
-2.0V
-3.0V
0s
0.1s
0.2s
0.3s
0.4s
0.5s
0.6s
0.7s
0.8s
V(U3:OUT)
Time
Figure 21: After amplification AD620
Figure 18: Optocoupler double
655
0.9s
1.0s
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 3, Issue 12, December 2013)
3.0V
[3] Peter M.Shearer, “Introduction to Seismology:The wave equation
and body waves”, Institute of Geophysics and Planetary Physics,
Scripps Institution of Oceanography, University of California, San
Diego, Notes for CIDER class, june 2010.
2.0V
1.0V
-0.0V
[4] Peter M.Shearer, “Introduction to Seismology”, Second Edition,
-1.0V
Scripps Institution of Oceanography University of California, , San
Diego.
-2.0V
[5] Larry Braile, “Identifying the S arrival on AS-1 Seismograms and
-3.0V
0s
0.1s
0.2s
0.3s
0.4s
0.5s
0.6s
0.7s
0.8s
0.9s
1.0s
V(C4:2)
2.8V
estimating distance using the S minus P method”, Purdue University,
February
2008,
Available:
http://web.ics.purdue.edu/~braile/edumod/as1lessons/Swave/Swave.
htm
2.4V
[6] “Basic principles of seismology”, Geophysics 210, University of
Time
Figure 22: After Filtering
3.2V
Alberta,
September
2008,
http://www.ualberta.ca/~unsworth/UAclasses/210/notes210/C/210C1-2008.pdf
2.0V
1.6V
Available:
[7] “EARTHQUAKE
SEISMOLOGY”,
Available:
http://seismo.berkeley.edu/~dalessio/CALIFORNIAGEOLOGY/Eart
hquakes/SeismologyHandout/LabHandout.pdf
1.2V
0.8V
0s
50ms
100ms
150ms
200ms
250ms
300ms
350ms
400ms
450ms
500ms
V(R7:2)
Time
Figure 23: Output Opto-Isolator
[8] Giuseppe Olivadoti, “Sensing, Analyzing, and Acting in the First
V. CONCLUSIONS
[9] “Earthquakes and Seismic Waves”, Designed to meet South
Moments of an Earthquake,” Analog Dialogue 35-1 (2001).
Carolina, Department of Education, 2005 Science Academic
Standards,
Available:
ftp://167.7.158.14/geology/Education/PDF/Earthquakes.pdf
As shown in figures of seismic signal receiving, the
simulated electronic circuit was able to detect low
frequencies and discover P and S waves. In this work, input
signal was designed between frequencies of 0.01 Hz to 10
Hz for filtering. In this system, the input was usually
between 0 and 20 mV and total amplification was equal to
2500. Also, loss of filter effect was considered. For this
purpose, the first class was amplified only by 100 times to
display only main signal. In this class, noise signal was also
amplified, which was done after high pass filtering by 30
times so that the signal resulting from earthquake sensor
could reach 0 to 5 volts.
In future works, analog to digital signal conversion
circuit using microcontroller will be designed by giving
information to computer.
[10] “AD620”, Low Cost Low Power Instrumentation Amplifier, Analog
Devices,
Available:
http://www.analog.com/static/importedfiles/data_sheets/AD620.pdf
[11] Bruce Carter, Thomas R. Brown, “Handbook of Operational
Amplifier Applications”, Texas Instruments, October
Available: www.ti.com/lit/an/sboa092a/sboa092a.pdf
[12] Ron Mancini, Editor in Cief, “Op Amps for Everyone Design
Refrence”, Texas Instruments, August 2002.
[13] Bruce Carter, “Using the Texas Instruments Filter Design Database”,
Texas Instruments, July 2001.
[14] “LM741 Operational Amplifier”, Texas Instruments, May 1998,
Available: www.ti.com/lit/ds/symlink/lm741.pdf
[15] Murari Kejariwal, Jerome Johnston, Timothy Hopkins and Prashanth
Drakshapalli, “A Low-Power High-precision Self-testing Data
Acquisition System for a Large Seismic Exploration Grid”, Cirrus
Logic Inc, 2901 Via Fortuna, Austin, TX 78746, USA, 2005.
REFERENCES
[1] Glossary
in
Seismology,
www.imd.gov.in/section/seismo/static/Glossary.pdf
2001,
Available:
[2] Seismic
Wave Behavior_effect on Building, Available:
http://www.iris.edu/hq/files/programs/education_and_outreach/aotm/
6/SeismicWaveBehavior_Building.pdf
656