PGA411-Q1 Step-by-Step Initialization With Any
advertisement

Application Report
SLAA688 – March 2016
PGA411-Q1 Step-by-Step Initialization With Any Host
System
Ankur Verma ........................................................................................................ Mixed Signal Analog
Fei Xu
Jiri Panacek
ABSTRACT
The purpose of this application report is to help with powering up and running the PGA411-Q1 device with
any microcontroller or any host system. This report includes the initialization sequence and code snippets
for the PGA411-Q1 device. This guide also describes how to interface with the PGA411-Q1 resolver-todigital converter.
The sections in this document list the recommended sequence to communicate with the PGA411-Q1
device, the step-by-step configuration, and the code snippets for basic functionality.
Contents
Introduction ................................................................................................................... 2
Step-by-Step Board Initialization ........................................................................................... 2
Detailed Explanation of SPI Command Sequence ...................................................................... 3
3.1
SPI Read and Write Communication Timing Examples ....................................................... 4
3.2
SPI Troubleshooting Tips .......................................................................................... 5
4
Example Code Snippets in the C Programming Language ............................................................ 6
4.1
Data Types .......................................................................................................... 7
4.2
Variables ............................................................................................................. 8
4.3
Functions............................................................................................................. 8
4.4
Reading Angle and Velocity ..................................................................................... 11
Appendix A
Additional Troubleshooting Tips ................................................................................. 13
Appendix B
AOUT Pin........................................................................................................... 14
Appendix C SPI Memory Map .................................................................................................. 15
1
2
3
List of Figures
1
System Block Diagram ...................................................................................................... 2
2
SPI Timing Diagram ......................................................................................................... 3
3
32-Bit SPI Frame
4
5
6
7
8
9
10
11
............................................................................................................ 4
Example SPI Write Operation .............................................................................................. 4
Dummy Read Access ....................................................................................................... 4
Second Phase of the Read Operation .................................................................................... 5
System Reset Flow for TIDA-00796 ....................................................................................... 6
Power-Up Timing Diagram ................................................................................................ 13
Analog Angle Output ....................................................................................................... 14
Test Output of Analog DAC ............................................................................................... 14
Tracking Loop Locked (AOUT Output is a Fixed Value) .............................................................. 14
Piccolo, C2000 are trademarks of Texas Instruments.
All other trademarks are the property of their respective owners.
SLAA688 – March 2016
Submit Documentation Feedback
PGA411-Q1 Step-by-Step Initialization With Any Host System
Copyright © 2016, Texas Instruments Incorporated
1
Introduction
1
www.ti.com
Introduction
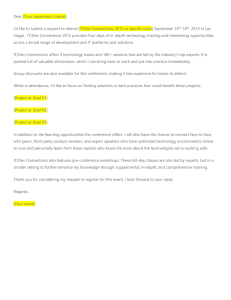
The contents of this application report are provided under the assumption that the setup shown in Figure 1
to interface the PGA411-Q1 device with the microcontroller (MCU) is complete and that the schematic and
layout recommendations listed in the PGA411-Q1 data sheet (SLASE76) and the application report,
PGA411-Q1 PCB Design Guidelines (SLAA697), are followed.
3.3 V for digital logic
5 V for the remaining system
5-V
VIO
SINE
Data<N>
From
Resolver
RESET
Host MCU
FAULTRES
PGA411-Q1
COSINE
FAULT
SPI <4>
To
Resolver
EXCITER
20-MHz XTAL
Figure 1. System Block Diagram
2
Step-by-Step Board Initialization
To ensure the custom PGA411-Q1 board functions and is set up properly, the faults are ignored in the first
part of the testing process
The second part of the testing process describes how to read the faults in the system.
Use the following command sequence:
Step 1. Apply power (ensure VCC, QVCC, and VIO voltages are in range according to the PGA411-Q1
data sheet).
Step 2. Ensure that the NRESET signal has a low-to-high transition.
Step 3. Wait for the start-up time (approximately 5.2 ms because of the diagnostics checks, ABIST
and LBIST, at start-up). See Appendix A for a detailed timing diagram.
Step 4. Check the AOUT signal to ensure that the digital core turns on. See Appendix B for more
information about the AOUT pin.
Step 5. Set the FAULTRES pin logic low.
NOTE: An EEPROM configuration is already stored in the PGA411-Q1 device. The default
configuration is sufficient to test the initial working of the PGA411-Q1 device, however, for
final production, customer-specific EEPROM configuration should be programmed.
If the setup is compatible with the default EEPROM settings (4 VRMS output mode, a 10-kHz
excitation signal), no additional register configuration is required to obtain the preliminary
angle and velocity data.
In the first part of the testing process, the FAULTRES pin can be held low to keep the exciter output
enabled even during fault conditions. Otherwise, if any faults occur in the system, the PGA411-Q1 device
enters the FAULT state and the FAULT pin goes into the High-Z state. Running the system for the first
time has a high chance for some faults to occur in the system and therefore TI recommends to ignore the
fault conditions. Ensure that no high current short circuits occur on the exciter amplifier. See the following
NOTE.
2
PGA411-Q1 Step-by-Step Initialization With Any Host System
Copyright © 2016, Texas Instruments Incorporated
SLAA688 – March 2016
Submit Documentation Feedback
Detailed Explanation of SPI Command Sequence
www.ti.com
NOTE: Toggling the FAULTRES pin with a fault condition still present causes the PGA411-Q1
device to go into normal operation, which may cause damage to the PGA411-Q1 device.
This is most likely to occur with high-current short circuits on the exciter amplifier. Ignoring
the faults is only recommended for initial evaluation.
For a list of the faults and troubleshooting steps to help remove all fault conditions, see the application
report, Troubleshooting Guide for PGA411-Q1 (SLAA687).
3
Detailed Explanation of SPI Command Sequence
The following list includes the important items to check in the SPI command sequence while
communicating with the PGA411-Q1 device:
• The NCS pin is kept low when sending a 32-bit command. One byte is loaded to the SPI shift registers
and then sent to the slave device, which occurs 4 times to maintain the 32-bit time frame.
• The clock must be within the specified frequency range (< 8 MHz).
• The SPI does not support back-to-back SPI frame operation. After each SPI transfer, the NCS pin
must go from low to high to low before the next SPI transfer can start.
• Each SPI transfer is considered as a 32-bit frame.
• The minimum time, tw_cs, between two SPI commands during which the NCS pin must remain high is
200 ns.
The PGA41x-Q1 SPI includes a four-wire SPI using the following pins:
• The NCS pin which is the SPI chip select (active low) pin.
• The SCLK pin which is the SPI clock pin.
• The SDI pin which is the SPI slave in and master out (SIMO) pin.
• The SDO pin which is the SPI slave out and SPI master in (SOMI, tri-state output) pin.
In this case the resolver-to-digital converter is always configured as a slave device.
The SPI should follow the timing shown in Figure 2.
The SPI frame size is 32 bits, with an MSB-first alignment using the assignments shown in Figure 2.
NCS
th_cs
tw_cs
SCLK
tsu_cs
twhigh
twlow
tsu_cs
SDI
tsu_si
th_si
tsu_si
SDO
tpd_soen
tpd_so
tpd_sodis
tpd_soen
tpd_so
For timing requirements, see the PGA411-Q1 data sheet (SLASE76).
Figure 2. SPI Timing Diagram
SLAA688 – March 2016
Submit Documentation Feedback
PGA411-Q1 Step-by-Step Initialization With Any Host System
Copyright © 2016, Texas Instruments Incorporated
3
Detailed Explanation of SPI Command Sequence
www.ti.com
31
MSB
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
LSB
7
6
5
4
3
2
1
0
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
1
0
5
4
3
2
1
0
7
6
5
4
3
2
1
0
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
1
0
5
4
3
2
1
0
NCS
SCLK
SDI
SDO
ADDR
ECBK
DATA
RSVD
STAT
MCRC
SCRC
Figure 3. 32-Bit SPI Frame
3.1
SPI Read and Write Communication Timing Examples
Figure 4 shows a practical example of a SPI transfer which represents writing a value of 0x8FC0 to the
DEV_OVUV1 register. The entire 32-bit packet corresponds to 0x878FC019 where 0x87 is the
DEV_OVUV1 write address, 0x8FC0 is the data to be written, and 0x19 is the CRC-6. Bytes are
transferred from the most significant to the least significant. The PGA411-Q1 device returns the content of
the previously accessed on the SDO (SOMI) pin. This content is typically discarded after a write operation
unless a safety check during a bulk write is implemented.
500 ns
23 µs
500 ns
24 µs
500 ns
25 µs
500 ns
26 µs
500 ns
27 µs
NCS
SCLK
SDI (SIMO)
SDO (SOMI)
NRST
Figure 4. Example SPI Write Operation
The read operation occurs in two phases. The first phase is a dummy read which sets the internal register
pointer of the PGA411-Q1 device to the desired DEV_OVUV2 register (see Figure 5). The entire 32-bit
packet corresponds to 0x6B00F000 where 0x6B is the DEV_OVUV2 read address, 0x00F0 is the random
dummy content of the SPI, and 0x00 is the CRC-6. The return data from this read corresponds to the
register that was previously read and can be discarded.
The second phase of the read operation, shown in Figure 6, returns the content of the desired register.
The entire 32-bit packet is identical with the previous read. During the second read phase, the PGA411Q1 device returns the content of the desired DEV_OVUV2 register because this location was accessed in
the previous access.
NOTE: Some registers must be unlocked before accessing. Refer to the data sheet for further
details.
45 µs
500 ns
46 µs
500 ns
47 µs
500 ns
48 µs
500 ns
49 µs
500 ns
NCS
SCLK
SDI (SIMO)
SDO (SOMI)
NRST
Figure 5. Dummy Read Access
4
PGA411-Q1 Step-by-Step Initialization With Any Host System
Copyright © 2016, Texas Instruments Incorporated
SLAA688 – March 2016
Submit Documentation Feedback
Detailed Explanation of SPI Command Sequence
www.ti.com
68 µs
500 ns
500 ns
69 µs
500 ns
70 µs
500 ns
71 µs
500 ns
72 µs
NCS
SCLK
SDI (SIMO)
SDO (SOMI)
NRST
Figure 6. Second Phase of the Read Operation
3.2
SPI Troubleshooting Tips
Use the following steps to troubleshoot the SPI:
1. Verify that the SPI data is clocked in on the falling edge, and the SPI clock polarity and idle value (the
clock idle state is low and the slave reacts on a falling edge). The corresponding SPI configuration is
CPOL = 0 and CPHA = 1.
2. Check that the CRC-6 code is computed correctly by the MCU. Use the examples provided in the
PGA411-Q1 data sheet (SLASE76), troubleshooting application report (SLAA687), and the code
snippets listed in Section 4.
3. Composing the packet byte-by-byte using structures can also cause endianness or a structure packing
problem. Verify endianness using a scope to ensure the correct byte order (the most significant byte
must be transferred first: for example transferring 0x012345678 results in 0x01 as the first byte sent).
4. Verify the correct order of bits (the most significant bit must be transferred first).
5. Ensure that the NRESET signal is logic high.
6. Ensure that the NCS pin is logic low during transmission.
7. Check if the MCU periphery is set to allow 32-bit access. The NCS pin must remain low for the entire
32-bit transfer. If the SPI periphery does not allow a 32-bit wide access to occur, the NCS pin must be
controlled manually by software.
SLAA688 – March 2016
Submit Documentation Feedback
PGA411-Q1 Step-by-Step Initialization With Any Host System
Copyright © 2016, Texas Instruments Incorporated
5
Example Code Snippets in the C Programming Language
4
www.ti.com
Example Code Snippets in the C Programming Language
The following sections of code were used together with TI's F28069 Piccolo™ controlSTICK for the
C2000™ MCU and TI compiler. Other compilers may require different directives, such as the const (flash)
directive.
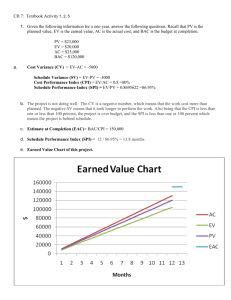
Knowledge of the C programming language is assumed. The following code snippets describe the basic
functionality for interfacing with the PGA411-Q1 device. Figure 7 shows the flow for the system reset. The
FAULT pin can be tied to an interrupt routine in the microcontroller (not shown in Figure 7). Refer to
Safety Manual for PGA411-Q1 Resolver Sensor Interface (SLAA684) for additional information on the
FAULT usage.
NOTE: All provided code snippets are provided without warranty and should only be used as a
starting point.
SYSTEM RESET
MCU BASIC INTITIALIZATION
Pga411_Init()
Program Loop
PGA411-Q1 RELATED
GPIO PINS INITIALIZATION
hal_InitPgaGPIO()
READ ANGLE
pga411_ReadReg(DEV_STAT5)
SPI INITIALIZATION
hal_InitSPI()
CALCULATE
PGA411-Q1 RESET USING GPIO
pga411_Reset()
SYSTEM ACTION
Pga411_DefaultCfg()
GO TO DIAG STATE
pga411_State(DIAG)
READ VELOCITY
pga411_ReadReg(DEV_STAT6)
UNLOCK THE PGA411-Q1 REGISTERS
pga411_DeviceUnlock()
WRITE APPLICATION SPECIFIC
DEFAULT CONFIGURATION
CALCULATE
SYSTEM ACTION
GO TO NORMAL STATE
pga411_State(NORM)
DEGLITCH TIME WHEN THE EXCITER
ENABLES
CLEAR FAULTS IF ANY
pga411_FaultReset()
Figure 7. System Reset Flow for TIDA-00796
6
PGA411-Q1 Step-by-Step Initialization With Any Host System
Copyright © 2016, Texas Instruments Incorporated
SLAA688 – March 2016
Submit Documentation Feedback
Example Code Snippets in the C Programming Language
www.ti.com
4.1
Data Types
Defining data types can occur in the header file or in the C file depending on the required level of module
encapsulation. The correct file location to start in is a C file. This type of data preparation helps to create a
complex structure in the C file which contains all important PGA411-Q1 related data.
4.1.1
PGA411-Q1_SPI_FRAME_T (Header or C File)
This type of definition helps to access individual fields in the frames as well as the entire 32-bit data block.
The same structure can be used for both the outgoing and incoming frame, using the small trick with union
directive.
typedef union
{
/* outgoing data frame (from master to slave) */
struct
{
/* reverse order in bitfields, starting from bit 0 */
Uint32
mcrc:6;
/* master's CRC for data, bits 0..5 */
Uint32
reserved:2;
/* reserved, always 0, bits 6..7 */
Uint32
dataout:16;
/* data, MSB first, bits 8..23 */
Uint32
addr:8;
/* register address, bits 24..31 */
};
/* incomming data frame (to master from slave */
struct
{
Uint32
scrc:6;
/* slaves's CRC for data, bits 0..5 */
Uint32
stat:2;
/* status of SPI communication, bits 6..7 */
Uint32
datain:16;
/* data, MSB first, bits 8..23 */
Uint32
ecbk:8;
/* register address, bits 24..31 */
};
/* and finaly the whole frame */
struct
{
Uint32
frame;
};
} PGA411_spi_frame_t;
4.1.2
PGA411-Q1_REG_T (Header or C File)
This type of definition helps to create a structure of registers containing read and write addresses, realtime values, and default-content values. Mandatory SPI read and write address are placed in permanent
memory (FLASH) using the const directive. Using the default value and real-time value depends on the
implementation.
typedef struct
{
/* registers definition */
const Uint16 read_add;
/*
const Uint16 write_add; /*
const Uint16 def_val;
/*
Uint16 real_val;
/*
SPI read address */
SPI write address */
default PGA value */
realtime register content */
} PGA411_reg_t;
SLAA688 – March 2016
Submit Documentation Feedback
PGA411-Q1 Step-by-Step Initialization With Any Host System
Copyright © 2016, Texas Instruments Incorporated
7
Example Code Snippets in the C Programming Language
4.1.3
www.ti.com
Macros, Enums (Header File)
These macros store the relative address offset of the PGA411-Q1 registers. Refer to Appendix C or the
register maps in the PGA411-Q1 data sheet (SLASE76) for more information on registers.
/* PGA411 registers and their offsets */
#define
DEV_OVUV1
0x00
#define
DEV_OVUV2
0x01
#define
DEV_OVUV3
0x02
#define
DEV_OVUV4
0x03
..
..
..
These enums can be replaced by macros. The benefit of the enumerated type is auto numbering.
enum {READ, WRITE}; /* Enmus selects SPI operation */
enum {DIAG, NORMAL}; /* Operational states of PGA */
4.2
4.2.1
Variables
PGA411_REGS (C file)
This array of the register-structure data type is defined as follows. The declaration also defines (initializes)
the SPI read and write address for the PGA411-Q1 registers. Refer to Appendix C or the register maps in
the PGA411-Q1 data sheet (SLASE76) for more information on registers.
PGA411_reg_t PGA411_regs[PGA411_REG_COUNT] =
{
/* memory constants init */
[DEV_OVUV1]
= {.read_add = 0x53, .write_add = 0x87, .def_val = 0xBFC0},
[DEV_OVUV2]
= {.read_add = 0x6B, .write_add = 0x26, .def_val = 0x00C0},
[DEV_OVUV3]
= {.read_add = 0x65, .write_add = 0x17, .def_val = 0xFCFF},
..
..
..
4.3
4.3.1
Functions
CRC Calculation
This CRC calculation routine is optimized for the PGA411-Q1 example code running on a 32-bit C2000
MCU little endian. The input of the function corresponds to an entire 32-bit frame but only the higher 24
bits are used for the calculation. TI recommends to check the output of the routine with the SPI CRC
examples listed in the PGA411-Q1 data sheet.
/* CRC6 calculation - optimized for PGA411 */
Uint16 PGA411_crc2 (Uint32 datin)
{
Uint16 byte_idx, bit_idx, crc= (CRC_INITSEED «2);
/* byte by byte starting from most significant (3-2-1) */
for(byte_idx = CRC_BYTECOUNT; byte_idx >= 1; byte_idx--)
{
/* XOR-in new byte from left to right */
crc ^= ((datin » (byte_idx«3)) & 0x000000FF);
/* bit by bit for each byte */
for(bit_idx = 0; bit_idx < 8; bit_idx++)
{
crc = crc « 1 ^ (crc & 0x80 ? (CRC_POLYNOM«2) : 0);
}
}
return(crc » 2 & CRC_INITSEED); /*restore two bit offset */
8
PGA411-Q1 Step-by-Step Initialization With Any Host System
Copyright © 2016, Texas Instruments Incorporated
SLAA688 – March 2016
Submit Documentation Feedback
Example Code Snippets in the C Programming Language
www.ti.com
4.3.2
SPI Communication Trigger
Calling this function triggers SPI communication. The hal_Xmit4BSPI and hal_assert functions are
functions defined in the hardware abstraction layer. Depending on the dir parameter, the appropriate SPI
address is selected. In case the CRC calculation for the incoming SPI frame fails, program termination is
called.
/* Xmit data to PGA over SPI, for reg use defined macros */
PGA411_spi_frame_t PGA411_XmitSPI(Uint16 dir, Uint16 reg, Uint16 wdata)
{
PGA411_spi_frame_t out, in;
/* do we read data ? */
if(dir == READ) out.addr = PGA411_regs[reg].read_add; /* read address */
/* or write data ? */
else out.addr = PGA411_regs[reg].write_add; /* write address */
/* compose the rest of the frame */
out.dataout = wdata; /* real data (W) or dummy data (R) */
out.reserved = 0x00; /* always zero */
out.mcrc = PGA411_crc2(out.frame); /* calculate TX CRC */
in.frame = hal_Xmit4BSPI(out.frame);
/* check RX CRC */
if(PGA411_crc2(in.frame) != in.scrc)
{
hal_assert(); /* if eeror -> terminate */
}
return(in);
}
4.3.3
Reading Data from Register
This function makes reading data from a register easier.
/* Read data from defined */
Uint16 PGA411_ReadReg(Uint16 reg)
{
/* first read returns whatever */
PGA411_XmitSPI(READ, reg, SPI_DUMMY);
/* second read returns requested data */
return (PGA411_XmitSPI(READ, reg, SPI_DUMMY).datain);
}
Example use:
i = PGA411_ReadReg (DEV_OVUV1);
4.3.4
Writing Data to a Register
This function makes writing data to a register easier.
/* Write data to defined register */
void PGA411_WriteReg(Uint16 reg, Uint16 data)
{
/* here we just making it nice, can be macro too */
PGA411_XmitSPI(WRITE, reg, data);
}
Example use:
PGA411_WriteReg (DEV_OVUV1, 0x8FC0);
4.3.5
Switching Between Diagnostics and Normal State
This function changes between the DIAGNOSTICS state and the NORMAL state based on the state
parameter (defined by the enum).
SLAA688 – March 2016
Submit Documentation Feedback
PGA411-Q1 Step-by-Step Initialization With Any Host System
Copyright © 2016, Texas Instruments Incorporated
9
Example Code Snippets in the C Programming Language
www.ti.com
NOTE: After NRESET, the transition from the DIAGNOSTICS state to the NORMAL state is
automatic (if no fault is present).
When the DIAGNOSTICS state is requested through SPI, then the automatic transition does
not happen and the PGA411-Q1 device waits until the SPI transaction sets the DIAGEXIT bit
to take the device back to the NORMAL state.
/* Change state diagnostic/normal */
void PGA411_State (Uint16 state)
{
Uint16 temp;
/* Enter Diagnostic state */
if(state == DIAG)
{
/* read content of DEV_CONTROL3 register */
temp = PGA411_ReadReg(DEV_CONTROL3);
temp |= 0x0004; /* set bit SPIDIAG */
PGA411_WriteReg(DEV_CONTROL3, temp); /* finish R-M-W */
}
/* Go back to normal state */
else
{
/* read content of DEV_CONTROL1 register */
temp = PGA411_ReadReg(DEV_CONTROL1);
temp |= 0x0001; /* set bit DIAGEXIT */
PGA411_WriteReg(DEV_CONTROL1, temp); /* finish R-M-W */
}
}
4.3.6
Unlocking the Device
This function performs the device unlocking procedure. Refer to the PGA411-Q1 data sheet for more
information.
NOTE: The PGA411-Q1 device must be in the DIAGNOSTICS state and the complete unlock
procedure must be completed within 10 ms.
/* Device unlock (must be in diagnostic state) */
void PGA411_DeviceUnlock (void)
{
PGA411_WriteReg(DEV_UNLK_CTRL1, 0x000F);
PGA411_WriteReg(DEV_UNLK_CTRL1, 0x0055);
PGA411_WriteReg(DEV_UNLK_CTRL1, 0x00AA);
PGA411_WriteReg(DEV_UNLK_CTRL1, 0x00F0);
}
4.3.7
Unlocking EEPROM
This function unlocks the EEPROM registers. Refer to the PGA411-Q1 data sheet for more information.
NOTE: The PGA411-Q1 device must be in the DIAGNOSTICS state and the complete unlock
procedure must be completed within 10 ms.
/* EEPROM unlock (must be in diagnostic state) */
void PGA411_EEPROMUnlock (void)
{
PGA411_WriteReg(DEV_EE_CTRL4, 0x000F);
PGA411_WriteReg(DEV_EE_CTRL4, 0x0055);
PGA411_WriteReg(DEV_EE_CTRL4, 0x00AA);
PGA411_WriteReg(DEV_EE_CTRL4, 0x00F0);
}
10
PGA411-Q1 Step-by-Step Initialization With Any Host System
Copyright © 2016, Texas Instruments Incorporated
SLAA688 – March 2016
Submit Documentation Feedback
Example Code Snippets in the C Programming Language
www.ti.com
4.4
Reading Angle and Velocity
The angle and velocity data are also available in the register memory space and can be polled through the
SPI. The corresponding locations are the ORDANGLE bit in the DEV_STAT5 register for angle data value
and the ORDVELOCITY bit in the DEV_STAT6 register for velocity data value.
Use the following equations to convert the PGA411-Q1 parallel output or SPI data into meaningful angle
and velocity values:
• 10-bit angle:
ORDx
M (degrees) 360 u 10
(1)
2
• 12-bit angle:
ORDx
M (degrees) 360 u 12
(2)
2
• 10-bit velocity:
¦ u 25'[
- (RPM) 60 u clk
221
where
•
•
where ƒclk is the device clock frequency (typically 20 MHz)
(3)
12-bit velocity
- (RPM)
60 u
¦clk u 25'[
225
(4)
The angle data read from PGA411-Q1 device is in hexadecimal format and is an unsigned 16-bit integer.
Only the lower 12 bits contain the angle information. A value of 0 represents 0 degrees. Therefore a value
of 4096 represents 360 degrees. Use Equation 5 to calculate the angle in degrees.
Angle (hexadecimal)
Angle (degrees) 360 u
4096
(5)
4.4.1
Angle Calculation Example
The following code snippet reads angle data from the PGA411-Q1 device, calculates the corresponding
angle and prints the result over a serial port to the host system.
The provided example uses Texas Instruments' IQmathLib library
(processors.wiki.ti.com/index.php/IQmath_Library_for_C28x). An alternate approach uses the traditional
float or fixed point (Q number format) arithmetic. The final approach should be considered based on the
hardware architecture.
/* angle calculation for the PGA411 using IQmathLib library */
/* _iq19 stores -4096 to 4095.999998093 with 0.000001907 resolution */
{
Uint16 angle_raw; /* raw data from the PGA411 register */
_iq angle; /* IQ math angle */
/* read data from the PGA411 */
angle_raw = pga411_ReadReg(DEV_STAT5);
angle_raw &= 0x1FFF; /* preserve only ORDANGLE bits */
/* multiply minimal step (LSB) by ORDANGLE value */
angle = _IQ19mpy(_IQ19(360.0/4096), _IQ19(angle_raw)); /* 12b example */
/* convert IQ variable to string */
_IQ19toa(outbuf, "%4.5f", angle);
/* print-out the buffer */
hal_PutsUART(outbuf);
}
SLAA688 – March 2016
Submit Documentation Feedback
PGA411-Q1 Step-by-Step Initialization With Any Host System
Copyright © 2016, Texas Instruments Incorporated
11
Example Code Snippets in the C Programming Language
4.4.2
www.ti.com
Velocity Calculation Example
Similarly to the angle calculation example, the next code snippet reads velocity data from the PGA411-Q1
device, calculates velocity and prints the result over a serial port.
The velocity calculation is more complex than the angle calculation. Velocity data (10 or 12 bit) from the
PGA411-Q1 are stored in 2's-complement format. However, because of different word size, the data must
be first converted. This conversion occurs as follows:
Step 1. Check the sign (bit 11).
Step 2. Convert to the positive integer.
Step 3. Preserve only the ORDVELOCITY bits.
Step 4. Cast to float format.
Step 5. Multiply by –1 if the sign is negative
The IQmathLib library is used for the final velocity calculation and string conversion. The final
implementation should consider target architecture, especially float and negative integer data
representation.
/* velocity calculation for the PGA411 using IQmathLib library */
/* _iq14 stores -131072 to 131071.999938965 with 0.000061035 resolution */
{
Int16 velocity_raw; /* raw data from the PGA411 register */
float velocity_float; /* temp for 2nd complement to float conversion */
_iq velocity; /* IQ math velocity */
/* read data from the PGA411 */
velocity_raw = pga411_ReadReg(DEV_STAT6);
/* convert 2nd complement to float */
if(velocity_raw & 0x0800) /* negative number ? */
{
/* convert to positive number first */
velocity_float = (((~velocity_raw) +1) & 0x07FF);
velocity_float *= -1; /* and make it negative */
}
else
{
/* positive number, preserve only needed bits */
velocity_float = (velocity_raw & 0x07FF);
}
velocity = _IQ14mpy(_IQ14(60*20000000/33554432),_IQ14(velocity_float + 1)); /* 12b
example */
/* convert IQ variable to string */
_IQ14toa(outbuf, "%7.5f", velocity);
/* print-out the buffer */
hal_PutsUART(outbuf);
}
12
PGA411-Q1 Step-by-Step Initialization With Any Host System
Copyright © 2016, Texas Instruments Incorporated
SLAA688 – March 2016
Submit Documentation Feedback
Appendix A
SLAA688 – March 2016
Additional Troubleshooting Tips
NRESET
70 µs
nPOR
STATE
(Reset)
Diagnostics
Diagnostics
EEPROM Data
Download
Initial Auto Calibration
Approx.
200 µs
Normal
CRC
Approx. 200 µs
Wait
1.3 µs
LBIST
Wait
100 ms
2.3 ms
ABIST
5.2 ms
Boost Reg
Enable
Exciter
Enable
Tracking L
Enable
Normal
Wait
2 ms
CRC
Wait
2 ms
1.3 µs
Wait
100 ms
ORD
[12:0]
Data Update
Normal
Normal
CRC
1.3 µs
Auto Calibration
Approx.
200 µs
Data Hold
Wait
2 ms
Wait
100 ms
Data Update
CRC
1.3 µs
Auto Calibration
Approx.
200 µs
Data Hold
Wait
2 ms
Wait
100 ms
...
Data Update
100 ns
Figure 8. Power-Up Timing Diagram
SLAA688 – March 2016
Submit Documentation Feedback
PGA411-Q1 Step-by-Step Initialization With Any Host System
Copyright © 2016, Texas Instruments Incorporated
13
Appendix B
SLAA688 – March 2016
AOUT Pin
The AOUT pin represents the analog version of the angle output. The PGA411-Q1 device has internal 10bit DAC to convert the digital parallel output to an analog value between 0.5 V and 4.5 V. This feature is
intended to be used only for initial evaluation and debug. Figure 9 shows the analog voltage
representation of the angle. Figure 10 shows the AOUT performance when the RDC is working correctly
and the resolver sensor is rotating with constant velocity. The waveform is the same as the one shown in
Figure 10 even if the tracking loop is trying to lock. The AOUT has a fixed angular position when the
resolver is not moving. Figure 11 shows the OE1, OE2, and AOUT pins for a complete picture of the
system function.
VO (V)
4.5
0.5
0
360
0
360
Angle
(degrees)
0
Figure 9. Analog Angle Output
Figure 10. Test Output of Analog DAC
14
Figure 11. Tracking Loop Locked
(AOUT Output is a Fixed Value)
PGA411-Q1 Step-by-Step Initialization With Any Host System
Copyright © 2016, Texas Instruments Incorporated
SLAA688 – March 2016
Submit Documentation Feedback
Appendix C
SLAA688 – March 2016
SPI Memory Map
Table 1 provides an overview of each register located in the PGA411-Q1 SPI memory map.
Table 1. SPI Memory Map
Register Location
Register Name
SPI Read Address
SPI Write Address
0x00
0x01
Write State
Configuration CRC
DEV_OVUV1
0x53
0x87
YES
DEV_OVUV2
0x6B
0x26
Yes
0x02
DEV_OVUV3
0x65
0x17
Yes
0x03
DEV_OVUV4
0xEC
0x39
Yes
0x04
DEV_OVUV5
0x52
0x75
Yes
0x05
DEV_OVUV6
0xE9
0x83
0x06
DEV_TLOOP_CFG
0 xA6
0x42
DIAG
Yes
Yes
0x07
DEV_AFE_CFG
0xC2
0x91
Yes
0x08
DEV_PHASE_CFG
0 x57
0x85
Yes
0x09
DEV_CONFIG1
0xBE
0xEB
Yes
0x0A
DEV_CONTROL1
(1)
0x90
0x0D
Yes
0x0B
DEV_CONTROL2 (1)
0x63
0x38
0x0C
DEV_CONTROL3
0xDD
0xAE
0x0D
DEV_STAT1
0x81
No
0x0E
DEV_STAT2
0x4D
No
0x0F
DEV_STAT3
0x84
0x10
DEV_STAT4
0x1F
0x11
DEV_STAT5
0x41
No
0x12
DEV_STAT6
0x6F
No
0x13
DEV_STAT7
0xE1
No
0x14
DEV_CLCRC
0x4F
0xFC
0x15
DEV_CRC
0x0F
0xE7
0x16
CRCCALC
0xD9
0x17
DEV_EE_CTRL1 (2)
0xE3
0x6E
0x18
DEV_CRC_CTRL1
0x7A
0xB6
0x19
DEV_EE_CTRL4
0xBA
0x56
0x1A
DEV_UNLK_CTRL1
0x64
0x95
Yes
All
No
No
N/A (Read-only register)
DIAG
N/A (Read-only register)
No
No
No
No
No
DIAG
No
No
No
NOTE: The configuration registers that are accessible only in the DIAGNOSTICS state cannot be
written in case the PGA411-Q1 device is in the NORMAL operating state. Any attempt to do
so causes the DEV_STAT1 register STAT[1:0] = 0b11 response (such as Address Not
Found). However, these registers can be read in any state.
(1)
(2)
Device unlock sequence required in order to access register.
EEPROM space unlock sequence required in order to access register.
SLAA688 – March 2016
Submit Documentation Feedback
PGA411-Q1 Step-by-Step Initialization With Any Host System
Copyright © 2016, Texas Instruments Incorporated
15
IMPORTANT NOTICE
Texas Instruments Incorporated and its subsidiaries (TI) reserve the right to make corrections, enhancements, improvements and other
changes to its semiconductor products and services per JESD46, latest issue, and to discontinue any product or service per JESD48, latest
issue. Buyers should obtain the latest relevant information before placing orders and should verify that such information is current and
complete. All semiconductor products (also referred to herein as “components”) are sold subject to TI’s terms and conditions of sale
supplied at the time of order acknowledgment.
TI warrants performance of its components to the specifications applicable at the time of sale, in accordance with the warranty in TI’s terms
and conditions of sale of semiconductor products. Testing and other quality control techniques are used to the extent TI deems necessary
to support this warranty. Except where mandated by applicable law, testing of all parameters of each component is not necessarily
performed.
TI assumes no liability for applications assistance or the design of Buyers’ products. Buyers are responsible for their products and
applications using TI components. To minimize the risks associated with Buyers’ products and applications, Buyers should provide
adequate design and operating safeguards.
TI does not warrant or represent that any license, either express or implied, is granted under any patent right, copyright, mask work right, or
other intellectual property right relating to any combination, machine, or process in which TI components or services are used. Information
published by TI regarding third-party products or services does not constitute a license to use such products or services or a warranty or
endorsement thereof. Use of such information may require a license from a third party under the patents or other intellectual property of the
third party, or a license from TI under the patents or other intellectual property of TI.
Reproduction of significant portions of TI information in TI data books or data sheets is permissible only if reproduction is without alteration
and is accompanied by all associated warranties, conditions, limitations, and notices. TI is not responsible or liable for such altered
documentation. Information of third parties may be subject to additional restrictions.
Resale of TI components or services with statements different from or beyond the parameters stated by TI for that component or service
voids all express and any implied warranties for the associated TI component or service and is an unfair and deceptive business practice.
TI is not responsible or liable for any such statements.
Buyer acknowledges and agrees that it is solely responsible for compliance with all legal, regulatory and safety-related requirements
concerning its products, and any use of TI components in its applications, notwithstanding any applications-related information or support
that may be provided by TI. Buyer represents and agrees that it has all the necessary expertise to create and implement safeguards which
anticipate dangerous consequences of failures, monitor failures and their consequences, lessen the likelihood of failures that might cause
harm and take appropriate remedial actions. Buyer will fully indemnify TI and its representatives against any damages arising out of the use
of any TI components in safety-critical applications.
In some cases, TI components may be promoted specifically to facilitate safety-related applications. With such components, TI’s goal is to
help enable customers to design and create their own end-product solutions that meet applicable functional safety standards and
requirements. Nonetheless, such components are subject to these terms.
No TI components are authorized for use in FDA Class III (or similar life-critical medical equipment) unless authorized officers of the parties
have executed a special agreement specifically governing such use.
Only those TI components which TI has specifically designated as military grade or “enhanced plastic” are designed and intended for use in
military/aerospace applications or environments. Buyer acknowledges and agrees that any military or aerospace use of TI components
which have not been so designated is solely at the Buyer's risk, and that Buyer is solely responsible for compliance with all legal and
regulatory requirements in connection with such use.
TI has specifically designated certain components as meeting ISO/TS16949 requirements, mainly for automotive use. In any case of use of
non-designated products, TI will not be responsible for any failure to meet ISO/TS16949.
Products
Applications
Audio
www.ti.com/audio
Automotive and Transportation
www.ti.com/automotive
Amplifiers
amplifier.ti.com
Communications and Telecom
www.ti.com/communications
Data Converters
dataconverter.ti.com
Computers and Peripherals
www.ti.com/computers
DLP® Products
www.dlp.com
Consumer Electronics
www.ti.com/consumer-apps
DSP
dsp.ti.com
Energy and Lighting
www.ti.com/energy
Clocks and Timers
www.ti.com/clocks
Industrial
www.ti.com/industrial
Interface
interface.ti.com
Medical
www.ti.com/medical
Logic
logic.ti.com
Security
www.ti.com/security
Power Mgmt
power.ti.com
Space, Avionics and Defense
www.ti.com/space-avionics-defense
Microcontrollers
microcontroller.ti.com
Video and Imaging
www.ti.com/video
RFID
www.ti-rfid.com
OMAP Applications Processors
www.ti.com/omap
TI E2E Community
e2e.ti.com
Wireless Connectivity
www.ti.com/wirelessconnectivity
Mailing Address: Texas Instruments, Post Office Box 655303, Dallas, Texas 75265
Copyright © 2016, Texas Instruments Incorporated