Wouter Soenen fiber Design of a 4-PAM gigabit optical front
advertisement

Design of a 4-PAM gigabit optical front-end for PCS
fiber
Wouter Soenen
Promotoren: prof. dr. ir. Johan Bauwelinck, Xin Yin
Begeleiders: Renato Vaernewyck, Arno Vyncke
Masterproef ingediend tot het behalen van de academische graad van
Master in de ingenieurswetenschappen: elektrotechniek
Vakgroep Informatietechnologie
Voorzitter: prof. dr. ir. Daniël De Zutter
Faculteit Ingenieurswetenschappen en Architectuur
Academiejaar 2011-2012
Design of a 4-PAM gigabit optical front-end for PCS
fiber
Wouter Soenen
Promotoren: prof. dr. ir. Johan Bauwelinck, Xin Yin
Begeleiders: Renato Vaernewyck, Arno Vyncke
Masterproef ingediend tot het behalen van de academische graad van
Master in de ingenieurswetenschappen: elektrotechniek
Vakgroep Informatietechnologie
Voorzitter: prof. dr. ir. Daniël De Zutter
Faculteit Ingenieurswetenschappen en Architectuur
Academiejaar 2011-2012
Preface
’Only the simplest can accomodate the most complex’ (Junji Kimura from 47 Laboratory) is
a philosophy I adopted for this thesis. A well known and by myself experienced law is that
more circuit complexity at board level leads to an exponential increase in debug issues. As a
consequence, many hours were spent at the lab. But all work and no play makes Jack a dull
boy, so luckily Pablo and Radio Beach from the ’Kraaienest’ were always present to provide
the necessary distraction.
Although the writing of the thesis is done individually, it is not a one man’s job. Therefore
I would like to thank some people who contributed to the achieved end result. First off all,
prof. dr. ir. D. De Zutter and prof. dr. ir. J. Vandewege for providing the infrastructure of
the faculty of Engineering and the lab of the INTEC Design group. Next are my two mentors
ir. Arno and ir. Renato who never hesitated to help me when I had some questions. Ir. Jochen
on the other hand gave me new insight in circuit analysis and my promotors prof. dr. ir. J.
Bauwelinck and dr. ir. X. Yin taught me several practical debug tricks. My two companions
Bjorn and Cardoen made the enumerous water breaks very enjoyable and sometimes assisted
me in eliminating some nasty circuit oscillations. I certainly cannot forget to mention the rest
of the INTEC Design group, especially ing. Jan who fabricated the printed circuit boards and
maintains the IT-infrastructure. Thanks also to my family, friends and girlfriend whom which
I could always rely on. Now, enough for the jibber-jabber and enjoy your reading.
Wouter Soenen
University of Ghent, 30th of May 2012
Permission for consultation
’De auteur geeft de toelating deze masterproef voor consultatie beschikbaar te stellen en delen
van de masterproef te kopiëren voor persoonlijk gebruik. Elk ander gebruik valt onder de
beperkingen van het auteursrecht, in het bijzonder met betrekking tot de verplichting de bron
uitdrukkelijk te vermelden bij het aanhalen van resultaten uit deze masterproef.’
’The author gives permission to make this master dissertation available for consultation and
to copy parts of this master dissertation for personal use. In the case of any other use, the
limitations of the copyright have to be respected, in particular with regard to the obligation to
state expressly the source when quoting results from this master dissertation.’
Wouter Soenen
University of Ghent, 30th of May 2012
Design of a 4-PAM gigabit optical
front-end for PCS fiber
by Wouter Soenen
Promotors: Prof. Dr. Ir. Johan Bauwelinck, Dr. Ir. Xin Yin
Supervisors: Ir. Renato Vaernewyck, Ir. Arno Vyncke
Master Dissertation submitted to obtain the academic degree of Master of Science in
Electrical Engineering
Department of Information Technology
Head of Department: Prof. Dr. Ir. Daniël De Zutter
Faculty of Engineering and Architecture
Ghent University, Academic Year 2011-2012
Overview
Recently, a lot of research is invested in determining a new high speed future proof MOST
standard for the automotive sector. The communication link consists of an optical fiber which
is lightweight and immune to EMI. Until now, polymer optical fiber (POF) was used as link but
this is characterized by a high attenuation and strong modal dispersion. An alternative fiber
named step index polymer-clad silica (SI-PCS) is suggested in literature which can cover longer
distances at higher data rates. By using 4-PAM modulation, the bitrate can be doubled for the
same bandwidth of the fiber and receiver as with NRZ-modulation. This thesis will focus on
designing a discrete transmitter-receiver combination for PCS with 4-PAM modulation. The
desired bitrate is set at 2.5 Gbps which corresponds to 1.25 GBd.
A driver was designed based on the current-steering mechanism with two differential pairs to
create a four level current. An 850 nm VCSEL was chosen as laser diode because at this
wavelength the PCS attenuation only amounts 0.02 dB/m. No RC-matching network or back
termination was inserted which allows equal rise and fall times of 120 ps. The driver dissipates
only 65 mW at a supply of 5 V.
Several TIA topologies were studied with bipolar and HEMT technology. Finally, a TIA was
chosen based on a cascode input stage with the BFP740 transistor from Infineon. A two stage
post amplifier with emitter degeneration was added to provide 50 Ω output matching and an
additional gain of 10 dB in a 50 Ω load. The combination of TIA and post amplifier compose
the final receiver. It is specified by an input-referred noise current of 200 nA, a bandwidth of
700 MHz and a gain of 87.1 dBΩ. The power dissipation is rather high at 510 mW.
Eye diagram measurements were performed with 4-PAM at different fiber lengths and bitrates
with a PRBS of 231 − 1. The maximum bitrate corresponding to a theoretical BER of 10−4
ranges from 2.2 Gbps at 1 m to 0.7 Gbps at 12 m. The sensitivity of the complete system
measures -13 dBm.
Keywords
SI-PCS, 4-PAM, TIA, laser driver, discrete
Design of a 4-PAM gigabit optical front-end for
PCS fiber
Wouter Soenen
Supervisor(s): Prof. Dr. Ir. Johan Bauwelinck, Dr. Ir. Xin Yin, Ir. Renato Vaernewyck, Ir. Arno Vyncke
Abstract—A 4-PAM optical communication system is presented that utilizes a SI-PCS fiber as optical link and an 850 nm VCSEL as transmitter.
The laser driver and receiver were built with discrete transistors at board
level. The driver is based on the current-steering mechanism with two differential pairs. Symmeterical rise and fall times of 120 ps were achieved.
The highly linear receiver consists of a 1.3 GHz photodiode and a cascode
TIA followed by an emitter degenerated post amplifier. A transimpedance
gain of 87.1 dBΩ at 700 MHz bandwidth was obtained with 200 nA inputreferred noise current. The complete system can operate at 2.2 Gbps over 1
m PCS and at 700 Mbps over 12 m PCS with a BER of 10−4 and an input
power of approximately -13 dBm. The driver consumes 65 mW and the
receiver 510 mW at a supply of 5 V.
Keywords—SI-PCS, 4-PAM, TIA, laser driver, discrete
I. I NTRODUCTION
ECENTLY , a lot of research is invested in determining a
new high speed future proof MOST standard for the automotive sector. The communication link consists of an optical fiber which is lightweight and immune to EMI. Until now,
polymer optical fiber (POF) was used as link but this is characterized by a high attenuation and strong modal dispersion. An
alternative fiber named step index polymer-clad silica (SI-PCS)
is suggested in [1] which can cover longer distances at higher
data rates. By using 4-PAM, the bitrate can be doubled for the
same bandwidth of the fiber and receiver as with NRZ modulation. This article will focus on designing a discrete transmitterreceiver combination for SI-PCS with 4-PAM modulation. It is
investigated if a bitrate of 2.5 Gbps is possible at board level
and also which distance can be bridged at gigabit speeds using
SI-PCS.
R
II. 4-PAM DC- COUPLED LASER DRIVER
A 4-PAM optical signal is obtained by switching a four level
current through a laser diode. These four levels are created by
using two differential pairs of which the operation is based on
the current-steering mechanism. The tail current sources are dimensioned at a modulation current IM of 1.25 mA and 2.5 mA.
The load of the driver is an 850 nm VCSEL. The interface to the
laser diode must be DC-coupled to provide multilevel modulation. The laser is continuously biased at 2.5 mA to avoid turn-on
delay. RF capacitive loading of the bias current source is prevented with a ferrite bead. The architecture of the driver and the
equivalent model of the VCSEL can be inspected in Figure 1.
Implementing back termination or insertion of an RC-matching
network was prevented by careful circuit layout. This enables
symmetrical rise and fall times of 120 ps which is more than
fast enough to switch at 1.25 GBd or 2.5 Gbps with 4-PAM [2].
W. Soenen is with the INTEC Design Department, Ghent University (UGent),
Ghent, Belgium. E-mail:Wouter.Soenen@UGent.be .
Vcc
VD
LV
Rdu
CV
RV
IB
Rdu
RD
Q1
Q2
bit0
Q3
Q4
bit0 bit1
IM
bit1
2IM
Fig. 1. Architecture of the 4-PAM laser driver
An active probe measurement across RD is shown in Figure 2.
Ringing at a frequency of 3 GHz can be observed at the top level.
However, this doesn’t degrade the quality of the transmitted optical signal because the bandwidth limitation of the VCSEL filters out this unwanted phenomenon. The driver consumes 65
mW at a supply of 5 V.
Fig. 2. Active probe measurement across RD at 400 Mbps with a PRBS of
25 − 1 (50 mV/div, 1 ns/div)
III. O PTICAL RECEIVER
The optical receiver consists of a photodiode and a transimpedance amplifier (TIA) followed by a post amplifier (PA).
The photodiode is from Hamamatsu and has a bandwidth of 1.3
GHz and a capacitance of 1.6 pF. The cascade of TIA and PA
must provide linearity over a broad input power range. In a real
application, automatic gain control (AGC) must be applied to
fix the levels at a constant voltage. However, this becomes too
complex at board level and the receiver is designed with a fixed
gain.
A. BJT cascode TIA
When designing TIA’s, it is very important to maximize Rf
to obtain a higher gain and a lower input-referred noise current
[4]. This can be realized by minimizing the capacitance at the
input of Q1 which is dominated by the Miller effect. A cas-
code input circuit performs this task much better than the traditional common emitter stage. The low source impedance of the
LED D1 allows common base operation of Q2 which is necessary in an efficient cascode stage. Oscillations at multiples of
the bandwidth were eliminated by the capacitor Cc . The bandwidth of the circuit shown in Figure 3 was dimensioned at 450
MHz while pursuing a Bessel response. A feedback resistor Rf
of 9 kΩ corresponds to a gain of 77.1 dBΩ. The BFP740 from
Infineon was chosen for Q1 because of its exceptional low noise
performance. An eye diagram at 900 Mbps is shown in Figure
5.
Fig. 5. Eye diagram of the TIA (left) and the cascade (right) with a PRBS of
231 − 1
Vcc
R1
receiver delivers 27 dB more gain at a slightly higher bandwidth.
The power dissipation is rather high with 510 mW at 5 V. An eye
diagram was constructed at 1.25 Gbps in Figure 5.
Rc
D1
Vcc
IV. C OMPLETE 4-PAM OPTICAL SYSTEM
Q2
Vb2
Cd
Cc
iPD
Q3
vo
Q1
I3
Rf
Fig. 3. BJT cascode TIA
B. Linear post amplifier
The task of the post amplifier is to provide extra gain and
high linearity. The latter is achieved by using emitter degeneration, see Figure 4. The first stage delivers most of the gain
while the last stage provides proper 50 Ω output matching. To
reduce the current through the input matching (bias) network
R1 //R2 , a transmission line (TL) of 80 Ω was chosen. Simulations revealed an in and output mismatch of less than -10 dB up
to 2 GHz and a bandwidth of 3.5 GHz. The frequency response
shows peaking and is associated with overshoot in the time domain. The measured gain into a 50 Ω load amounts 10 dB. The
circuit consumes 300 mW at 5 V in an AC-coupled configuration.
Vcc
Vcc
Rc1
R1
Ro,tia
TL
R3
Q1
Fig. 6. 4-PAM eye diagrams for different lenghts of SI-PCS with a PRBS of
231 − 1
Rc2
TL
C2
C1
The combination of transmitter-receiver was tested with different lengths of SI-PCS fiber using 4-PAM modulation. The
reference BER for determining maximum speed was specified at
10−4 . Figure 6 shows eye diagrams at 1m, 6m and 12 m of PCS
fiber. The system reaches a sensitivity of -13 dBm at 2.2 Gbps
and -19.2 dBm at 1.8 Gbps. The 4-PAM receiver in [3] reaches
a better sensitivity of -16 dBm at 2.5 Gbps with a BER of 10−9 .
Remark that those figures are somewhat misleading since they
used a commercial 4-PAM generator. Dispersion of the fiber is
the main cause for the reduced bitrates at longer distances. Additional measurements with NRZ modulation demonstrated that
4-PAM enables a higher bitrate when discrete components are
used.
Q2
Vo
V. C ONCLUSIONS
Ri,next
By applying 4-PAM modulation in an optical communication
system composed of discrete components, bitrates as high as 2.2
Gbps become possible. A sensitivity of -13 dBm was reached at
this speed for a BER of 10−4 . The receiver was optimized for
high gain, low noise and high linearity. The presented system
demonstrates that gigabit transmission over SI-PCS is limited to
distances smaller than 12 m due to fiber dispersion.
The cascade of the TIA and PA results in a very high gain of
87.1 dBΩ. The peaking of the PA was used to compensate for
the limited bandwidth of the cascode TIA. With this technique,
the receivers bandwidth was extended to 700 MHz. The inputreferred noise current measures 200 nA over a 1.6 GHz noise
bandwidth. This is 30 nA higher than [3] which was implemented in a 0.6 µm BiCMOS process. However, the presented
[1] Thomas Kibler, Stefan Poferl, Optical data buses for automotive applications, Journal of lightwave technology, 2004.
[2] Eduard Säckinger, Broadband circuits for optical fiber communication, Wiley, 2005.
[3] Mohamed Atef, Robert Swoboda, Horst Zimmerman, An integrated optical
receiver for 2.5 Gbit/s using 4-PAM signaling, International conference on
Microelectronics, 2010.
[4] Carolien Hermans, Michiel Steyaert, Broadband opto-electrical receivers
in standard CMOS, Springer, 2007.
Vtia
A
B
+
-
R2
R4
Re1
Re2
Fig. 4. Emitter degenerated post amplifier
C. Cascade of TIA and post amplifier
R EFERENCES
Ontwerp van een 4-PAM gigabit optische front-end
voor PCS vezel
Wouter Soenen
Promotor(en): Prof. Dr. Ir. Johan Bauwelinck, Dr. Ir. Xin Yin, Ir. Renato Vaernewyck, Ir. Arno Vyncke
Abstract— Een 4-PAM optisch communicatiesysteem wordt voorgesteld
dat gebruik maakt van SI-PCS vezel als optische link en een 850 nm VCSEL
als zender. De laser driver en ontvanger werden gebouwd met discrete transistoren op bordniveau. De driver is gebaseerd op het stroom-schakelend
mechanisme met twee differentiaalparen. Er werden symmetrische stijgen daaltijden van 120 ps bereikt. De zeer lineaire ontvanger bestaat uit een
1,3 GHz fotodiode en een cascode TIA gevolgd door een eindversterker met
emitter degeneratie. Een transimpedantieversterking van 87,1 dBΩ met
700 MHz bandbreedte werd bekomen met 200 nA ingangsgerefeerde ruisstroom. Het complete systeem kan werken aan 2,2 Gbps over 1 m PCS en
aan 700 Mbps over 12 m PCS met een BER van 10−4 en een ingangsvermogen van -13 dBm. De driver verbruikt 65 mW en de ontvanger 510 mW
bij een 5 V voeding.
Trefwoorden—SI-PCS, 4-PAM, TIA, laser driver, discreet
I. I NLEIDING
EGENWOORDIG wordt er veel onderzoek verricht naar
het vastleggen van een nieuwe hogesnelheids en toekomstgerichte MOST standaard voor de automobielindustrie. De
communicatielink bestaat uit een optische vezel die weinig
weegt en robuust is tegen EMI. Tot nu toe werd altijd polymer
optical fiber (POF) gebruikt als link, maar dit wordt gekenmerkt
door een hoge verzwakking en sterke modale dispersie. Een alternatief onder de naam step index polymer-clad silica (SI-PCS)
wordt voorgesteld in [1] die toelaat langere afstanden te overbruggen aan hogere datadebieten. Het gebruik van 4-PAM laat
toe de bitrate te verdubbelen voor eenzelfde bandbreedte van
ontvanger en vezel als met NRZ modulatie. Dit artikel zal de
nadruk leggen op het ontwerp van een discrete zender-ontvanger
combinatie voor SI-PCS met 4-PAM modulatie. Er zal onderzocht worden of een bitrate van 2,5 Gbps mogelijk is op bordniveau en welke afstanden er met SI-PCS kunnen afgelegd worden op gigabit snelheden.
de VCSEL kan geraadpleegd worden in Figuur 1. Een doordachte layout van het circuit maakt de invoeging van een RCaanpassingsnetwerk en implementatie van eindterminatie overbodig. Dit leidt tot symmetrische stijg- en daaltijden van 120 ps
wat vlug genoeg is om te schakelen op 1,25 GBd of 2,5 Gbps
met 4-PAM [2].
Vcc
VD
LV
Rdu
CV
RV
IB
Rdu
RD
T
Q1
Q2
bit0
Q3
Q4
bit0 bit1
IM
bit1
2IM
Fig. 1. Architectuur van de 4-PAM laser driver
Een actieve probe meting over RD is weergegeven in Figuur
2. Ringing op een frequentie van 3 GHz kan geobserveerd worden op het bovenste niveau. Dit heeft echter geen nadelige invloed op de kwaliteit van het verstuurde optisch signaal omdat
de bandbreedtebeperking van de VCSEL dit fenomeen eruit filtert. De driver verbruikt 65 mW bij een voedingsspanning van 5
V.
II. 4-PAM DC- GEKOPPELDE LASER DRIVER
Een 4-PAM optisch signaal wordt gecreëerd door een uit
vier niveaus bestaande stroom te sturen door een laserdiode.
Deze vier niveaus worden opgewekt met behulp van twee differentiaalparen waarvan de werking gebaseerd is op het stroomschakelend mechanisme. De staartstroombronnen worden gedimensioneerd op een modulatiestroom IM van 1,25 mA en 2,5
mA. De belasting van de driver is een 850 nm VCSEL. De interface met de laserdiode moet DC-gekoppeld zijn om meerdere
niveaus te kunnen schakelen. De laser wordt met een stroom
van 2,5 mA ingesteld om continue geleiding te garanderen en
inschakelvertragingen te vermijden. Hoogfrequente capacitieve
belasting van de instelbron wordt gereduceerd met een ferriet.
De architectuur van de driver en het vervangingsschema van
W. Soenen is lid van de INTEC Design vakgroep, Universiteit Gent (UGent),
Gent, België. E-mail:Wouter.Soenen@UGent.be .
Fig. 2. Actieve probe meting over RD op 400 Mbps met een PRBS van 25 − 1
(50 mV/div, 1 ns/div)
III. O PTISCHE ONTVANGER
De optische ontvanger is opgebouwd uit een fotodiode en
een transimpedantieversterker (TIA) gevolgd door een eindversterker (PA). De fotodiode is van Hamamatsu en bezit een banbreedte van 1,3 GHz en een capaciteit van 1,6 pF. De cascade van TIA en PA moet goede lineariteit vertonen over een
breed bereik van ingangsvermogen. In een realistische toepassing moet er automatische regeling van de versterking (AGC)
toegepast worden om de niveaus op een constante spanning vast
te klemmen. Dit zorgt echter voor een te grote complexiteit op
bordniveau. Vandaar dat de ontvanger ontworpen wordt met een
vaste versterking.
Rc1
R1
Ro,tia
Vtia
A. BJT cascode TIA
Vcc
Vcc
TL
R3
Rc2
TL
C2
C1
A
Q1
Q2
B
+
Vo
Ri,next
-
Bij het ontwerp van TIA’s is het van groot belang om Rf te
maximaliseren om een grote versterking en een lage ingangsgerefereerde ruisstroom te bekomen [4]. Dit kan gerealiseerd
worden door de capaciteit aan de ingang van transistor Q1 die
gedomineerd wordt door het Miller effect te minimaliseren. Een
cascode ingangscircuit presteert hiervoor veel beter dan de traditionele gemeenschappelijke emitter schakeling. De lage uitgansimpedantie van LED D1 zorgt voor gemeenschappelijke basis
werking van Q2 wat noodzakelijk is in een efficiënt cascode circuit. Oscillaties op een veelvoud van de bandbreedte werden
geëlimineerd dankzij condensator Cc . De bandbreedte van het
circuit gegeven in Figuur 3 werd gedimensioneerd op 450 MHz
waarbij een Bessel responsie werd nagestreefd. Een terugkoppelweerstand Rf van 9 kΩ komt overeen met een versterking
van 77,1 dBΩ. De BFP740 transistor van Infineon werd gekozen
voor Q1 vanwege zijn uitzonderlijk lage ruisgedrag. Een oogdiagram op 900 Mbps is te zien op Figuur 5.
R2
R4
Re1
Re2
Fig. 4. Emitter gedegenereerde eindversterker
bandbreedte van 1,6 GHz. Dit ligt 30 nA hoger dan [3] die
geı̈mplementeerd was in een 0,6 µm BiCMOS proces. De
voorgestelde ontvanger vertoont wel 27 dB meer versterking
bij een iets hogere bandbreedte. Een oogdiagram werd geconstrueerd op 1,25 Gbps in Figuur 5.
Vcc
R1
Rc
D1
Vcc
Q2
Vb2
Cd
Cc
iPD
Q3
vo
Fig. 5. Oogdiagram van de TIA (links) en de cascade (rechts) met een PRBS
van 231 − 1
Q1
I3
Rf
Fig. 3. BJT cascode TIA
B. Lineaire eindversterker
De taak van de eindversterker bestaat erin extra versterking te
leveren met een sterk lineair gedrag. Dat laatste wordt bereikt
door het toepassen van emitter degeneratie, zie Figuur 4. De
eerste trap staat in voor het leveren van de nodige versterking
terwijl de laatste trap aanpassing naar 50 Ω voorziet aan de uitgang. Om de stroom te beperken door het aanpassingsnetwerk
R1 //R2 wordt een transmissielijn (TL) van 80 Ω toegepast. Simulaties demonstreren een misaanpassing aan in- en uitgang die
lager is dan -10 dB tot aan 2 GHz. De bandbreedte van de versterker bedraagt 3,5 GHz met een versterking van 10 dB in een
50 Ω last. De frequentieresponsie vertoont een piekend verloop
dat zich vertaalt naar doorschot in het tijdsdomein. Het circuit
dissipeert 300 mW bij 5 V in een AC-gekoppelde configuratie.
IV. 4-PAM OPTISCH COMMUNICATIESYSTEEM
De combinatie van zender-ontvanger werd getest met verschillende lengtes van SI-PCS gebruik makend van 4-PAM
modulatie. De referentie-BER voor het bepalen van de maximum snelheid wordt vastgelegd op 10−4 . Figuur 6 demonstreert
oogdiagrammen bij 1m, 6 m en 12 m PCS vezel. Het systeem
bereikt een gevoeligheid van -13 dBm bij 2,2 Gbps en -19,2
dBm bij 1,8 Gpbs. De 4-PAM ontvanger in [3] haalt een betere
gevoeligheid van -16 dBm aan 2,5 Gbps met een BER van 10−9 .
Merk echter op dat bovenstaande getallen ietwat misleidend zijn
omdat een commerciële 4-PAM generator gebruikt werd. Dispersie van de vezel is de voornaamste oorzaak van de dalende
bitrates bij grotere afstanden. Extra metingen met NRZ modulatie toonden aan dat 4-PAM hogere bitrates mogelijk maakt
wanneer discrete componenten worden toegepast.
C. Cascade van TIA en eindversterker
De cascade van TIA en PA resulteert in een zeer hoge versterking van 87,1 dB. Het piekgedrag van de PA compenseert
de beperkte bandbreedte van de cascode TIA. Met deze techniek wordt een bandbreedte van 700 MHz bekomen. De ingangsgerefereerde ruisstroom bedraagt 200 nA over een ruis-
Fig. 6. 4-PAM oogdiagrammen voor verschillende lengtes van SI-PCS met een
PRBS van 231 − 1
V. B ESLUIT
Het toepassen van 4-PAM modulatie in een optisch communicatiesysteem opgebouwd uit discrete componenten maakt bitrates tot 2,2 Gbps mogelijk. Een gevoeligheid van -13 dBm
werd bereikt op deze snelheid met een BER van 10−4 . De ontvanger werd geoptimaliseerd naar hoge versterking, lage ruis en
hoge lineariteit. Het voorgestelde systeem onthult dat gigabit
transmissie over SI-PCS beperkt blijft tot afstanden kleiner dan
12 m als gevolg van dispersie van de vezel.
R EFERENTIES
[1] Thomas Kibler, Stefan Poferl, Optical data buses for automotive applications, Journal of lightwave technology, 2004.
[2] Eduard Säckinger, Broadband circuits for optical fiber communication, Wiley, 2005.
[3] Mohamed Atef, Robert Swoboda, Horst Zimmerman, An integrated optical
receiver for 2.5 Gbit/s using 4-PAM signaling, International conference on
Microelectronics, 2010.
[4] Carolien Hermans, Michiel Steyaert, Broadband opto-electrical receivers
in standard CMOS, Springer, 2007.
Contents
1 Optical communication system
1
1.1
Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
1.2
Performance measurements . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
1.3
Characteristics of the optical fiber . . . . . . . . . . . . . . . . . . . . . . . . .
2
1.4
Optical networks for automotive applications . . . . . . . . . . . . . . . . . . .
4
1.4.1
MOST . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
1.4.2
The need for a new standard . . . . . . . . . . . . . . . . . . . . . . . .
5
2 Optical transmitter
2.1
2.2
9
Laser diode: VCSEL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9
2.1.1
Modulation scheme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9
2.1.2
Equivalent model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11
4-PAM driver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11
2.2.1
Architecture
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11
2.2.2
Optimization of the driver . . . . . . . . . . . . . . . . . . . . . . . . . .
16
2.2.3
Layout of the circuit . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
20
2.2.4
Measurements
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
23
2.2.5
Revision . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
24
3 Opto-electronic receiver
3.1
29
Transimpedance amplifier theory . . . . . . . . . . . . . . . . . . . . . . . . . .
29
3.1.1
29
Shunt-shunt feedback topology . . . . . . . . . . . . . . . . . . . . . . .
xvii
xviii
Contents
3.1.2
Small signal analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
30
3.2
Noise analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
33
3.3
Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
34
3.3.1
Sensitivity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
34
3.3.2
Group delay variation . . . . . . . . . . . . . . . . . . . . . . . . . . . .
38
3.3.3
Bandwidth allocation . . . . . . . . . . . . . . . . . . . . . . . . . . . .
39
3.3.4
Dynamic range . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
40
3.4
Single ended vs. differential . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
40
3.5
Characterization of the receiver . . . . . . . . . . . . . . . . . . . . . . . . . . .
41
3.5.1
Measuring BER from eye diagram . . . . . . . . . . . . . . . . . . . . .
41
3.5.2
Input-referred noise current . . . . . . . . . . . . . . . . . . . . . . . . .
43
3.6
Stability simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
44
3.7
Common source/emitter TIA . . . . . . . . . . . . . . . . . . . . . . . . . . . .
46
3.7.1
Bipolar version . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
46
3.7.2
HEMT version . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
49
Cascode TIA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
50
3.8.1
Bipolar version . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
50
3.8.2
HEMT version . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
52
Comparison of receivers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
53
3.10 Post amplifier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
55
3.10.1 Considerations for 4-PAM . . . . . . . . . . . . . . . . . . . . . . . . . .
55
3.10.2 Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
56
3.10.3 Emitter degeneration . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
57
3.11 Cascade of TIA and post amplifier . . . . . . . . . . . . . . . . . . . . . . . . .
60
3.8
3.9
4 Evaluation of the complete system
63
4.1
Optimization for 4-PAM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
63
4.2
POF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
63
Contents
xix
4.3
PCS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
65
4.4
Defining the gigabit MOST standard . . . . . . . . . . . . . . . . . . . . . . . .
68
5 Conclusion
71
5.1
Conclusion
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
71
5.2
Suggestions for future work . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
71
Appendices
73
A Influence of VCSEL parameters on the driver matching network
73
B Additional eye diagrams for PCS
75
Bibliography
77
Glossary
<
η
Psens
di2n,tia
τf
τr
τtod
responsivity
slope efficiency
average optical sensitivity
input-referred noise current spectral density
fall time
rise time
turn-on delay
CV
junction and diffusion capacitance
DRopt
optical dynamic range
fT
transition frequency
IB
IL
IM
in,tia
irms
n
Ith
bias current
load current
modulation current
averaged input-referred noise current density
input-referred rms noise current
threshold current
Jpp
peak-to-peak jitter
NA
numerical aperture
Psens
optical sensitivity
RD
RT
RV
Rbd
damping resistor
termination resistor
dynamic resistance
baudrate
VD
vrms
n
vpp
s
VCE
forward voltage
output-referred rms noise voltage
peak to peak output voltage swing
collector emitter voltage
xxi
Glossary
xxii
Acronyms
4-PAM
four level pulse amplitude modulation
ADS
AGC
advanced design system
automatic gain control
BER
BERT
bit error rate
bit error rate test
DUT
device under test
ER
extinction ratio
GD
GI
group delay
graded index
HEMT
high electron mobility transistor
ISI
intersymbol interference
LSB
least significant bit
MOST
MSB
media oriented systems transport
most significant bit
NF
NRZ
noise figure
non return to zero
OS
overshoot
PA
PCS
POF
PRBS
PWD
post amplifier
polymer-clad silica
polymer optical fiber
pseudo random bit sequence
pulse width distortion
SI
SNR
step index
signal to noise ratio
xxiii
xxiv
Acronyms
SONET
synchronous optical networking
TIA
TL
transimpedance amplifier
transmission line
UI
unit interval
VCSEL
vertical cavity surface emitting laser
ZBW
transimpedance bandwidth
Chapter 1
Optical communication system
1.1
Overview
An optical communication system sends information through light instead of electricity. In
the past, these systems were mainly used in the telecommunication sector for providing longhaul high speed internet connections to the world. Nowadays, the variety of applications is
expanding to the automobile and aviation industry. The main advantages of optical fiber over
copper connections are immunity to electromagnetic interference and low weight. Due to the
increasing complexity in cars, the amount of electronics and cables is ever expanding. Since
the new trend is green and eco, it is important to reduce fuel usage. This can be achieved
by minimizing the mass of the car. Replacing the copper cables by optical fiber can help
to accomplish this target. The same trend is noticeable in airplanes where they exchange
the metal fuselage for carbon-fiber to reduce the weight. A drawback however is a reduced
protection against lightning and radiation interference. To compensate this, one has to use
heavy shielding on the copper wires which makes it expensive and heavy. Optical fiber enables
an elegant alternative. The disadvantage of this interconnection is the difficult installation and
expensive active components which perform the optical to electrical conversion and vice versa.
This is largely overcome by using thick fibers such as polymer-clad silica (PCS) or polymer
optical fiber (POF) [1].
LD
digital
logic
driver
PD
data
TIA
fiber
transmitter
PA
CDR
clock
digital
logic
receiver
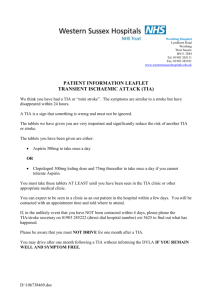
Figure 1.1: Block diagram of an optical communication system
A block diagram of a basic optical communication system is given in Figure 1.1. As can be
seen, it consists of a transmitter, fiber and receiver. The digital input block will construct an
electrical signal that interfaces with the driver from the digital information. Various coding and
processing algorithms can be used to make it rigid against interference and errors. The driver
1
Chapter 1. Optical communication system
2
will then modulate the current of a laser diode at the speed of the incoming bitstream. The
optical signal will travel over the fiber to the receiver. There it is converted back to an electrical
current by the photodetector. Since most logic works with voltages, a transimpedance amplifier
(TIA) is needed to amplify and transform the weak current to a voltage. Because the TIA is
the first chain in the receiver, its noise performance must be very good as to cope with weak
signals. The strength of the signal will not be large enough in most cases. Therefore a second
amplifier stage is necessary. This can be implemented as a limiting amplifier or with automatic
gain control (AGC). The last component in the chain is the Clock and Data Recovery (CDR)
circuit. This extracts a clock signal from the signal stream and retimes the data. This clock
signal is very important to sample the data at the right instant. The sampled voltage is then
fed through a decision block which determines the digital level. From there on, digital signal
processing is performed to reconstruct the originally sent bitstream [2]. Needless to say that
this whole process happens with as little errors as possible.
1.2
Performance measurements
The performance of different communication systems can be compared with each other based
on several parameters. One of the most significant ones is the bit error rate (BER). This
is the ratio of incorrectly received bits versus the total amount of sent bits. A typical BER
for the complete system is between 10−9 and 10−12 . It is possible that the evaluation of a
single component is specified for a smaller BER, e.g. 10−3 for the TIA. This is done under
the assumption that error correcting codes decrease the BER significantly. The BER can be
measured directly with a bit error rate test (BERT) scan. An analyzer compares the sent bits
with the received bits and calculates the BER. Because this is not so practical and fast to work
with, another measure is used where the BER can be extracted from: the eye diagram.
An eye diagram is measured with an oscilloscope in persistence mode where a pseudo
random bit sequence (PRBS) serves as the input signal of the device under test (DUT). The
time axis of the scope is set to a multiple of unit interval (UI). This will generally be one
full UI in the middle and one half UI at the right and left side. The PRBS signal consists
of pulse streams at different bitrates. The range of bitrates is determined by the length of
the shift register that generates the streams. A popular register length is 31 bits which can
generate 231 − 1 possible bitrates where the upperbound is asked as an input parameter with
such a generator. Because the signal is random, the oscilloscope cannot trigger itself. It must
be triggered externally by the clock output from the generator. The scope then displays and
memorizes all the possible bit transitions during the simulation/measuring time. An example
of an eye diagram can be observed in Figure 1.2. EH stands for the eye height and directly
fixes the signal to noise ratio (SNR) and therefore also the BER. The horizontal eye opening
depends on the Jpp . When this becomes too high, horizontal closure of the eye occurs. This
causes sampling errors which also influence the BER in a negative way.
1.3
Characteristics of the optical fiber
Light travels from transmitter to receiver through an optical fiber that acts as a waveguide.
The fiber is built from a silica or polymer core surrounded by a cladding, see Figure 1.3. Both
Chapter 1. Optical communication system
3
Figure 1.2: Example of an eye diagram
have a specific refractive index ncore and ncladding . When the light ray enters the fiber with
an angle smaller than the acceptance angle, the ray is reflected provided that ncore > ncladding
[3]. The cladding is thus optically less dense than the core. Due to reflections, the ray is
guided through the complete length of the fiber. When the incoming angle is too big, the
rays penetrate partly into the cladding which causes attenuation.This attenuation is usually
specified in dB/km with respect to the wavelength.
Figure 1.3: Mode propagation and construction of an optical fiber
The acceptance angle defines the NA . A larger NA corresponds to a larger core diameter.
This facilitates the alignment and connection of the light source to the fiber. However, the range
of possible paths that the rays can follow also increases. This brings us to a new phenomenon
called modal dispersion. Because of the large aperture, multiple paths exist which are called
modes. The fiber used in this work guides multiple modes, hence the appropriate name is multimode fiber. Because of the multiple existing modes, each ray will arrive at a different time
at the end of the fiber. When all these rays interfere to construct the pulse, pulse broadening
shows up. When the spreading is bigger than half a UI, the original waveform cannot be
properly reconstructed.
The light source is characterized by a specific wavelength λ, e.g. 850 nm. However, this
source is not perfect and the wavelength can vary over a range, referred to as the line width
∆λ, e.g. 0.85 nm. This means that different wavelengths travel through the fiber. Due to
material dispersion, different wavelengths travel at different speeds which also causes pulse
broadening [3]. Assuming the pulses are Gaussian and the bandwidth of the light source is
much higher than the signal bandwidth, a condition for the fiber bandwidth can be constructed
Chapter 1. Optical communication system
4
with respect to the baudrate [2]. An equivalent parameter, the transmission capacity, relates
the bandwidth to the length of the fiber and is expressed in MHz·km. Another name for it, is
the bandwidth-length product.
BWf iber ≥ 0.75Rbd
(1.1)
The profile of the refractive indexes of the cladding and the core depends on the construction
of the fiber. Two variations are mentioned briefly, the step index (SI) and graded index (GI)
profile depicted in Figure 1.4. With SI, the core is made of a homogeneous material which
causes an abrupt discontinuity in the profile. Multiple modes exist which cause a bandwidth
limitation via modal dispersion. By fabricating the core such that ncore shows a quasi parabolic
response with a maximum at the center of the core, modal dispersion can be significantly
reduced. Under the condition that light rays are excited at the center, no reflections occur at
the interface between core and cladding. Since the propagation speed is higher in a less dense
medium, the rays traveling along a longer path will approximately arrive at the same instant
as the shorter modes [3]. This way, the transmission capacity is much higher than with SI
fiber. For bitrates in the Gigabit region, GI is preferred above SI but the first one is also more
expensive.
Figure 1.4: SI profile versus GI profile [3]
1.4
1.4.1
Optical networks for automotive applications
MOST
The rise of audio and video applications next to the numerous sensoring systems in cars gave
birth to a new standard in the automotive industry. A consortium of car manufacturers developed the media oriented systems transport (MOST). The physical layer of this standard is
based on an optical ring network, Figure 1.5. The nodes of the ring are interconnected with
POF and synchronous data communciation exists only via the adjacent nodes. The optical
transmitter is a red LED and a PIN diode is used at the receiver side [4]. The PIN diode differs
from a regular diode because an intrinsic semiconductor region is inserted between the P and N
semiconductor material. It is this intrinsic region that makes detection of light possible. Since
datatransfer occurs at a neighbouring node or a node located far away in the ring, the receiver
must cope with weak and strong signals. This puts heavy requirements on the dynamic range.
The optical fiber used in MOST is SI PMMA POF. This has a core diameter of 980 µm, a
NA of 0.5, a transmission capacity of 3 MHz·km and a high fiber attenuation of 0.4 dB/m [4].
It can also sustain temperatures up to 85◦ C which is not a luxury since temperatures can rise
Chapter 1. Optical communication system
5
Figure 1.5: Ring network used in MOST [4]
very quickly under the hood. The large aperture makes it easy and cheap to connect the fiber
to the active component. To maximize coupling efficiency, the photodetector has a large active
area. This is associated with a high junction capacitance which decreases the bandwidth (see
chapter 3). Speeds of 25 and 50 Mbps were obtained in MOST25 and MOST50. Recently the
MOST150 was released to the public.
1.4.2
The need for a new standard
It is a common trend that communication speeds keep on rising due to innovative solutions
that require real time footage, e.g. night vision screen, automatically parking of the car,... The
circuitry and fiber must also bear high temperatures up to 125◦ C for accurate engine control.
More inline connectors are to be inserted between the nodes for enabling quick adaption of the
ring network. Next, the signal quality must be preserved with fiber lengths of around 20 m [4].
The current LED-POF system performs at its limit and can’t provide in all these new demands.
Therefore, the MOST committee is looking for alternative solutions. These can be found in a
future proof system where the POF is replaced with a PCS and the LED by a vertical cavity
surface emitting laser (VCSEL). A PCS contains a 200 µm silica core and a 230 µm polymer
cladding. It can therefore be seen as a mixture of POF and silica fiber. The smaller core
enables a smaller photodiode corresponding to a smaller capacitance. Modal dispersion is less
pronounced causing an increased bandwidth-length product. This parameter however is not
consistently specified and also depends on the measuring method. [4] states a capacity of 5
MHz·km and [3] achieves 20 MHz·km. Although optical coupling will be more critical than with
POF due to a smaller aperture, it can still be considered cost effective respective to silica fiber.
The chararacteristics of POF and PCS are summarized in Table 1.1. The spectral attenuation
of different fibers is shown in Figure 1.6. PCS causes about ten times less attenuation than
POF such that much longer links can be built. Its optimum lies at approximately 850 nm.
At this wavelength, a VCSEL is very effective. It can be modulated at much higher rates
extending to the Gigabit region. It’s also very power efficient and its narrow beam improves
coupling to the fiber. Furthermore, it can be tested at wafer level which reduces fabrication
costs. The robustness against high temperature also seems sufficient [5].
Since a PCS/VCSEL system performs better than the traditional POF/LED architecture,
more stringent specs can be constructed at the same bitrate. These are shown in Table 1.2 for
22.5 Mbps. The maximum output power is limited for eye safety regulations whereas the lower
bound constricts the available power budget. This budget is the difference between minimum
output power and the weakest signal a receiver can handle with good quality, specified as the
6
Chapter 1. Optical communication system
Table 1.1: Characteristics of PCS and POF [3],[4]
Parameter
core diameter (µm)
cladding diameter (µm)
refractive index profile
NA
attenuation (dB/m)
transmission capacity (MHz·km)
temperature range
POF
980
1000
SI
0.5
0.4 (650 nm)
3
-40◦ C...85◦ C
PCS
200
230
SI
0.37
0.02 (850 nm)
20
-40◦ C...125◦ C
Figure 1.6: Spectral attenuation of different fibers [4]
sensitivity. The new system reveals a higher power budget such that longer distances can be
covered.
Table 1.2: Power budget of POF/LED vs. PCS/VCSEL for MOST25 [5]
Parameter
max. output power (dBm)
min. output power (dBm)
receiver sensitivity (dBm)
power budget (dB)
inline connector loss (dB)
header connector loss (dB)
POF/LED
-1.5
-10
-23
13
2
2.5
PCS/VCSEL
-1.5
-9
-27
18
2
2.5
Members of the MOST society are still speculating which architecture and what speed
seems sufficient for future demands. Rest assured that the step from MOST150 to the new
standard will be significantly higher than with MOST50 to MOST150. Speeds up to 5 Gbps are
mentioned for non return to zero (NRZ) signals. NRZ is simply a signal with only two levels
corresponding to a logical high and low. This work will present a possible implementation
of a standard that works at a speed of 2.5 Gbps using the PCS/VCSEL architecture. The
maximal length of the fiber can be calculated using equation 1.1 and measures 10.7 m. By
7
Chapter 1. Optical communication system
using multilevel modulation, one can increase this length by including the modulation factor
M in 1.1. M-PAM modulation will divide the signal into M-1 intervals or M levels. Each
level corresponds to a symbol representing log2 M bits. The symbols are sent with a certain
baudrate Rbd . The baudrate is log2 M times smaller than the bitrate. Because the original
NRZ signal is divided by M-1 intervals, this sets heavy requirements on the performance of
the receiver. Therefore, M will be limited to four. The modulation format is 4-PAM and with
this a maximum fiber length of 21 m should be possible at 1.25 GBd or 2.5 Gbps. The fiber
attenuation for this distance totals 0.42 dB. The receiver sensitivity specified in Table 1.2 is not
realistic at this speed because a higher bandwidth is associated with more noise and sensitivity
becomes worse. Since no real guidelines are already published, one can use the ratio of the
bitrates to calculate a number for the sensitivity. A 9.5 dB increase in speed leads to a -17.5
dBm sensitivity. [6] states -16 dBm for a BER of 10−9 . In this context, the minimum BER
is chosen to be 10−3 . The circuits will be built with discrete components at printed circuit
board level. The performance at this level can never be as good compared to a realisation with
integrated circuits. The rather high BER eases the demands of the receiver. It is assumed
that error correction codes are applied to the information stream such that a BER of 10−6
or even 10−9 is possible. Table 1.3 lists the self determined specifications for the new optical
system.The power budget is still positive when subtracting the loss of two connectors. The
remaining power budget counts 4.9 dB. This can be completely dedicated to fiber attenuation.
With 0.02 dB/m, a theoretical maximum distance of 245 m can be bridged. This contrasts
with the 21 m limited by modal dispersion. Experimental measurements will try to determine
the maximum fiber length for 2.5 Gbps and a BER of 10−3 .
Table 1.3: Provisional specifications for a 2.5 Gbps PCS/VCSEL system
max. output power
min. output power
receiver sensitivity
power budget
header connector loss
BER (before error correction)
maximum length
-2.8 dBm
-7.6 dBm
-17.5 dBm
9.9 dB
2.5 dB
10−3
20 m
The new optical system must be very resistant to temperature variations up to 165◦ C. The
power levels of the transmitter can also change with time or temperature of the component.
These unwanted offsets and environment variables should be included in the design phase at
system level. Since this would make the design too extensive in a limited time frame, only the
basic system is designed as a proof of principle. This system consists of a driver and a TIA
followed by a postamplifier. The CDR in the receiver is not implemented.
Chapter 2
Optical transmitter
The optical transmitter will convert an electrical bitstream into an optical signal that can be
forwarded along the fiber cable. To perform this task, the combination of a driver and a laser
diode is necessary. It was shown in the previous chapter that a 850 nm VCSEL is the most
efficient device to use with PCS fiber. Before designing a driver, one must figure out how the
optical signal can be modulated with four level pulse amplitude modulation (4-PAM). Then
several driver topologies can be studied that implement this modulation format. Simulations
are done using the advanced design system (ADS) environment from Agilent. An equivalent
model of the VCSEL is created to reconstruct the reality. At the end of this chapter, a final
driver circuit is chosen, built and tested.
2.1
2.1.1
Laser diode: VCSEL
Modulation scheme
The optical power of a VCSEL is fully determined by the amount of current flowing through
it. The laser starts emitting light when a certain threshold current Ith is exceeded. Above
threshold, the optical power is linearly increasing with the current. This dependency is called
slope efficiency η and is expressed in mW/mA. With these two characteristics, whom are
typically mentioned in a datasheet, a modulation scheme can be built.
Optical power levels are created by steering different currents through the laser. The
quiescent current represents the dark or lowest level and is called the bias current IB when
the interface is DC-coupled. Two possibilities arise, one can choose IB below or above Ith .
The higher levels are provided by the modulation current IM . A term that is often used to
express the difference in optical levels is called the extinction ratio (ER) written in dB. In case
of NRZ, ER equals 10 · log PP01 where P1 is the top level and P0 the bottom. The extinction
ratio is related to the BER of the receiver because it sets the eye height of the eye diagram. A
higher ER results in greater eye opening and thus with a lower BER. Typical values range from
8 to 14 dB, e.g. synchronous optical networking (SONET) requires an ER of 8.2 dB. From
this point of view, it would be beneficial for the performance of the receiver when IB ≤ Ith .
This leads to an infinite extinction ratio as no light is transmitted at the lowest current level.
9
Chapter 2. Optical transmitter
10
There are however disadvantages with this technique at high bit rates. The BER of a system
also depends on the eye width of the eye diagram because a wider eye makes the system less
sensitive to sampling offsets. When the laser is biased below its threshold, it needs to switch on
every period which causes a turn-on delay. The turn-on time constitutes of this τtod in addition
to the rise time τr whereas the turn-off time is only limited by the fall time τf . This asymmetry
creates pulse width distortion (PWD) that translates into jitter. This jitter is above all data
dependent. At high bit rates, the pulse falls rapidly but may take several UI to completely be
at dark level. When a zero is preceded by multiple ones, the pulse will not have completely
fallen and the following pulse (in case of a one) will start from a higher level. Hence, it has a
smaller turn-on delay [7] and proves that τtod is data dependent and certainly √
unwanted. [2]
states that the modulation bandwidth or maximum bitrate is proportional to IB − Ith and
that τtod vanishes when IB ≥ Ith . The aforementioned problem can be avoided this way by
biasing the laser just above threshold. Despite a decrease in the ER, it is the only way to go
in order to achieve bitrates in the Gigabit region. Figure 2.1 shows the influence of correct
biasing.
The electronics situated in an automotive environment are exposed to a wide range of
temperatures varying from -40◦ C to 125◦ C according to the new MOST standard. For reliable
operation, the communication system must guarantee a maximum BER under all conditions.
It is therefore important to include the temperature dependent parameters of the VCSEL in
the final design of the driver. Empirical models have been constructed by manufacturers such
as Maxim and Honeywell [8], [7]. They all are different but show the same trend, namely
that Ith increases when temperature rises. The parameter η on the other hand decreases
with temperature. The efficiency of the laser diode becomes worse when located in a warm
surrounding. Figure 2.2 visualizes this variance and the relationship between optical power
and current for NRZ in a clear fashion. One can remark that the extinction ratio decreases
much with higher temperatures. This causes a power penalty and can be accounted for by
increasing the bias current and/or modulation current. This is usually done in a closed loop
control circuit that measures the average optical power with a monitoring photo diode. This
control circuit will not be implemented in this work.
Until now, the given examples were restricted to NRZ. In this thesis however, the objective
is to use 4-PAM modulation to obtain a higher bitrate, i.e. 2.5 Gbps or 1.25 GBd. In this
section, the exact power levels will be determined. First, a commercial VCSEL was chosen that
is fast enough for this application, i.e. OPV314Y from Optek. With a maximum bitrate of
2.5 Gbps, it certainly satisfies the speed requirements. The datasheet states that the threshold
current can vary between 1 and 3 mA. It also contains a graph that represents the relationship
between modulation current and optical power. The average optical power level of a laser is, due
to eye safety, restricted to -1.5 dBm which corresponds to 0.7 mW. However, a first modulation
scheme will maximize the output levels to obtain a high optical SNR. The biascurrent is set
to 3 mA and the modulation currents to 2.4 mA and 4.8 mA. This corresponds to an average
optical power of 1.2 dBm. Only the bias current will be made adjustable in the prototype of
the transmitter. Table 2.1 gives the different currents and optical levels. The ER is calculated
relative to the previous level. Remark that this spec is very low considering the rule of thumb
of 10 dB for NRZ. This will put a heavy requirement on receiver sensitivity. Furthermore, this
spec decreases as the current level rises. This reveals that the ER is not as useful to specify a
system that implements 4-PAM modulation in comparison with NRZ.
11
Chapter 2. Optical transmitter
Table 2.1: Relationship between laser current, output power and extinction ratio
I (mA)
3.0
5.4
7.8
10.2
P (mW)
0.4
1.0
1.6
2.2
P (dBm)
-3.80
-0.09
2.15
3.42
ER (dB)
/
3.7
2.2
1.3
Figure 2.1: Eye diagram of a VCSEL biased above Ith and below (right) resulting in increased jitter
[7]
2.1.2
Equivalent model
Before designing a driver, one needs to know how the VCSEL can be modeled to simulate its
behavior with CAD tools. Different models exist [9],[7] and [2], but they all show the same
main characteristic. Namely that the laser diode behaves much like a diode. Figure 2.3 shows
the model used in this work. Remark that this is only valid when the VCSEL is biased above
threshold. The two elements that correspond to a diode are the forward voltage drop VD and
the dynamic resistance RV . The OPV314Y has a VD of 1.6 V and the RV can vary between 20
and 50 Ω. RV increases with temperature and can also vary from wafer to wafer. Later, it will
become clear that this large range of variation makes the design of the driver more challenging.
The parasitic capacitance represents the CV of the VCSEL. The effective value of CV is not
specified by the manufacturer, but a rough approximation will be made. [2] says that CV of an
edge emitting laser is around 2 pF and RV 8 Ω. A VCSEL possesses a smaller capacitance and
a larger resistance. The ratio of the resistances is approximately 4 to 5. If the same reasoning
is applied to the ratio of CV , a value of 0.5 pF could be realistic. The inductance models the
packaging lead inductance and can be reduced by making the leads as small as possible. An
often applied rule of thumb is 1 nH/mm. The packaging of the OPV314Y is through hole and
the board thickness is 0.8 mm. This is equivalent to a minimum lead inductance of 1.6 nH. If
some margin is added to this and bringing into account the bond wires of the laser and the
trace length, an inductance of 4 nH is opted for.
2.2
2.2.1
4-PAM driver
Architecture
The most popular architecture for laser driver circuits is based on the current-steering mechanism [2]. A differential pair switches the current through the load in phase with the input signal.
This is applicable for NRZ, but one needs an extra switching pair for 4-PAM modulation [10].
12
Chapter 2. Optical transmitter
Figure 2.2: Temperature dependency of a VCSEL [8]
LV
VD
CV
RV
Figure 2.3: Equivalent model of a VCSEL
The schematic for the 4-PAM driver is shown in Figure 2.4. The four optical levels are created
by the bias current source and the two modulation current sources. The current through the
laser ranges from IB to IB +3IM . The pair consists of two legs of which only one is really used:
the right leg. Here the equivalent model for the VCSEL is placed in series with a damping
resistor RD This reduces ringing caused by the parasitic LC-circuit from the packaging. The
driver feeds the load through a 50 Ω transmission line (TL). Due to the distributed capacitance of the TL, parasitic inductance is eliminated. This is especially useful when the VCSEL
can’t be located right next to the driver or when the wavelength of the signal is becoming too
small with respect to the physical distance. The big disadvantage of this method is possible
reflections that degrade the eye. Because the resistance of the VCSEL is not so well specified,
impedance matching will become difficult. This problem will be tackled later on. In the left
leg, a dummy load is implemented to maintain a symmetrical load for the differential pairs. It
consists of a resistance equal to that of the real load and two diode-connected transistors to
mimic the forward voltage drop of 1.6 V of the laser diode. An asymmetric load configuration
creates an input offset voltage which causes PWD [2]. This in turn leads to a reduction of the
eye width.
The modulation currents IM and 2IM are realized by regular current mirrors. The collectoremitter voltage of the mirror is biased by the common-mode voltage of the input signal reduced
with the base-emitter voltage (Vbe ) of the switching transistors. The saturation voltage of the
13
Chapter 2. Optical transmitter
mirror is 0.2 V and Vbe of the switching transistors is approximately 0.8 V. The input must
therefore have a minimum DC-offset of 1 V. During operation, the voltage across the current
source remains constant. Circuits like a cascode or with emitter degeneration are overkill here.
For the bias current however, this will be necessary. It is important that the quiescent current
through the laser is constant so that a continuous on-state can be guaranteed. This is achieved
by increasing the output resistance of the source. The voltage across the bias source depends on
the switched current through the laser. As the output resistance of a basic mirror is limited to
V
ro = early
IB , the output current will not be constant for all conditions. To reduce the erroneous
current caused by this variation, emitter degeneration is used to increase the output resistance
to approximately ro · (1 + gm · RE ). Another problem of the high frequency voltage is capacitive
loading of the current source. The voltage across the parasitic capacitance of the output mirror
transistor is a square wave. Due to the differentiating effect of the capacitor, current peaks
will exist. These peaks could switch off the laser and should be minimized. Inserting a ferrite
bead between the VCSEL and collector of the mirror reduces the loading effect. The equivalent
model of the ferrite can be seen as a parallel RLC resonant circuit with a very high resistive
part. The resonance frequency of the ferrite bead must be higher than half the bit rate, i.e.
625 MHz. The chosen bead is from manufacturer Murata and behaves as an inductor with
high resistance up to 700 MHz, see Figure 2.5. This RL-circuit is in series with the output
capacitance of the transistor and the emitter resistor. A series resonant circuit appears with
a very low Q-factor forming a high impedance for the RF-voltage which suppresses the peak
currents. Looking again at Figure 2.4, one can notice that the bias current is fed directly to the
VCSEL instead of the collector of the switching transistor. This is done for two reasons. The
first one is an increased voltage headroom. The headroom is defined as the difference between
the power supply voltage Vcc and the sum of the individual voltage drops along a single circuit
path from Vcc to ground. The other reason is to further reduce the peak to peak voltage across
the biasing mirror circuit.
Vcc
VD
LV
D2
CV
RV
D1
IB
Rdu
TL
Q1
Q2
bit0
RD
Q3
Q4
bit0 bit1
IM
bit1
2IM
Figure 2.4: Basic 4-PAM driver architecture
This type of architecture, where the laser is directly connected to the differential pair is
called a DC-coupled interface. The bias current represents the lowest level here. Another
method is an AC-coupled interface where the laser is connected with a capacitor to the driver
Chapter 2. Optical transmitter
14
Figure 2.5: Impedance of the ferrite bead vs frequency
and with pull-up inductors to the supply. The bias current represents the average level and the
modulation current changes around this average [9]. The voltage across the load can become
higher than the supply voltage which leads to the biggest advantage of this method: increased
voltage headroom. An implementation of this topology would lead to the modulation scheme
displayed in Figure 2.6. It is seen that six different levels arise instead of the expected four. One
could solve this by adaptively changing the bias current according to the input bits. However,
this leads to a more complex topology. Although it should work in theory, in practice it could
become very difficult to realize due to device tolerances and offsets. It can be concluded that
a DC-coupled interface is necessary to implement multilevel modulation.
Figure 2.6: Comparison of the two different architectures with 4-PAM
The supply voltage has to be determined. Calculations are made assuming the worst case
scenario. The maximum current through the laser is 10.2 mA. The damping resistor is chosen
to be 30 Ω and the maximum series resistance is 50 Ω. The result shows that a supply voltage
of 3.3 V is possible. However, the switching transistors are faster when their VCE is over 0.5
V. Additionally, the mirrors are more accurate when VCE is sufficiently high and also have a
higher output impedance. In that case, a 5 V power supply is chosen.
Vcc ≥ VD + RV · (IB + IM max ) + RD · IM max + 2 · VCEsat
Vcc ≥ 1.6 + 50 · 0.0102 + 30 · 0.0072 + 2 · 0.2 = 2.73V
In the previous paragraph, it was proven that the input DC-offset must be at least 1V.
The AC-component must also have a specific value. Based on the equations below, the differential voltage must be at least 115 mV assuming both transistors are perfectly symmetric.
Considering a possible mismatch of 50 % which is reasonable with discrete components, an
input voltage swing of 200 mV guarantees full switching of the transistors [2]. The inverse
saturation current of a transistor is represented by IS in the formula for Vbe . The differential
15
Chapter 2. Optical transmitter
input signal must be fed to the driver with a coupled transmission line pair which is set to
an odd impedance of 50 Ω. At the end, this is terminated with 100 Ω such that small signal
differential voltages see a 50 Ω impedance. This way, reflections are suppressed. Also note
that it is important that both transmission lines are equal in length. Otherwise an offset input
voltage is induced creating PWD. For the first version of the driver, the DC-voltage will be
provided by the Agilent generator. Later on, levelshifters can be added as a predriver circuit
to fulfill this function.
Ic1
)
IS1
Ic2
Vbe2 = VT · ln(
)
IS2
Ic1 = 0.99 · IM
Vbe1 = VT · ln(
Ic2 = 0.01 · IM
IS2
∆V = VT · ln(99 ·
) = 115mV
IS1
A clever design of the transmitter can minimize the probability of bit errors. This can be
done in hardware by optimizing the driver circuit. The software part can make the information
sent rigid against intersymbol interference (ISI) and noise. Channel coding adds redundancy
to the bitstream such that bit errors can be corrected up to a certain level. An alternative
or extra method that reduces errors with multilevel modulation is Gray coding [11]. With
4-PAM two bits are represented by one symbol or optical level. Gray coding ensures that only
one bit changes during a level transition. When the decision unit at the receiver detects an
adjacent level instead of the correct one due to noise or ISI, only one bit error takes place.
Table 2.2 describes the relationship between the switched modulation currents and the input
signals bit0 and bit1. When a transition occurs from 2 IM to 1IM and vice versa, two bits
change value. The most significant bit (MSB) and least significant bit (LSB) are the Gray
coded versions of bit1 and bit0. The conversion is fairly easy for two bits and is bilateral. The
most significant bit stays the same, i.e. MSB=bit1. The least significant bit LSB=bit1⊕ bit0.
Hence, the input bitstream corresponds to MSB and LSB. This is converted to bit1 and bit0
to drive the differential pairs such that the optical power levels correspond to a Gray coded
modulation scheme. This way the BER is minimized for the same driver architecture. Remark
that this coding is not implemented in this work. It is however assumed to be present when
the sensitivity and the BER of the receiver is calculated.
Table 2.2: Gray coding for the 4-PAM driver architecture
bit1
1
1
0
0
bit0
1
0
1
0
Level
3IM
2IM
1IM
0IM
MSB
1
1
0
0
LSB
0
1
1
0
In Figure 2.7, the eye diagram is plotted for two different series resistances of the VCSEL
to describe the behavior under different conditions. The two pairs of input signals are a PRBS
16
Chapter 2. Optical transmitter
of 231 − 1 with a simulation length of 10000 bits. A shift register of 31 bits long is chosen
because the range of generated frequencies is mostly extended to the low end. This better
reveals weaknesses of the driver than a shorter shift register, e.g. a PRBS of 27 − 1 can give
overoptimistic results. From Figure 2.7, the four levels can be clearly distinguished proving that
the architecture creates a 4-PAM modulated signal. However, the quality of the eye is very poor.
The two figures both show some overshoot. This is caused by the parasitic inductance of the
packaging and pcb traces. For a higher impedance of the VCSEL, oscillations are noticeable
which are in fact double reflections. A reflection occurs at the load side because there is a
mismatch with the TL. When the reflected wave arrives back at the driver, it sees a high
impedance of the transistor. The wave is completely reflected again to the load because the
reflection coefficient equals one. A self-damped oscillation is started which causes the biggest
reduction of the eye height. It is clear that this has to be solved first. The power dissipation
of the basic driver is 102 mW.
Figure 2.7: Eye diagram for a TL of 15 mm with RV equal to 30 Ω and 50 Ω
2.2.2
Optimization of the driver
The problem of the double reflections can be solved by inserting a termination resistor RT of
50 Ω at the beginning of the transmission line [2]. The reflected wave coming from the load
is absorbed by this resistor and no oscillation occurs. The technique of absorbing reflections
coming from the load is called back termination and this is the passive variant. The new circuit
is shown in Figure 2.8. The biggest problem with this topology is the larger power dissipation
of the circuit. The current mirrors have to be biased at a higher value because part of the
current will flow through RT instead of the load. The new biasing values can be calculated by
using superposition of the three sources IB , IM and VD . The current IL that flows through the
VCSEL is expressed as followed:
IM · RT + IB · (RT + RD ) − VD
RT + RD + RV
IL = 0.45 · IM + 0.73 · IB − 14.5 mA
IL =
old bias circuit :
→ IM = 2.4 mA/4.8 mA, IB = 3 mA
new bias circuit :
→ IM = 5.3 mA/10.6 mA, IB = 24 mA
17
Chapter 2. Optical transmitter
Vcc
LV
D2
VD
RV
CV
D1
RT
Rdu
TL
Q1
Q2
bit0
IB
RD
Q3
Q4
bit0 bit1
IM
bit1
2IM
Figure 2.8: Driver with passive back termination
With the values RT =50 Ω, RD =RV =30 Ω and VD =1.6 V, the modulation current must
be doubled. The bias current undergoes the largest change. This has to compensate for the
current that flows directly into RT . The current through the VCSEL IL is with the new biasing
circuit equal to the previous version. The total power dissipation now amounts to an impressive
399 mW which is four times more than without back termination. Remark that the resistance
of the VCSEL can change with temperature. This will redistribute the load currents and the
optical power levels creating an eye with decreased opening. The eye diagram in Figure 2.9
proves the purpose of this technique by the dissapearance of the double reflections. A large
amount of overshoot is noticeable. This is caused by the higher switching currents through the
parasitics.
Figure 2.9: Eye diagram for a TL of 15 mm with RV equal to 30 Ω and 50 Ω using passive back
termination
It is clear that passive back termination isn’t an efficient method because of its high power
dissipation and dependency of the characteristics of the VCSEL. A more refined topology is
the active version of back termination [2]. Here the termination resistor RT is connected to
a replica stage, see Figure 2.10. The replica stage produces the same signal as the original
stage, but without double reflections because no transmission line is used. A buffer is inserted
between the replica and RT for isolation such that the the current levels are not disturbed.
When reflections occur at the right stage, a voltage difference exists across RT . This absorbs
18
Chapter 2. Optical transmitter
the reflected wave so no back reflection occurs. In the ideal situation, the termination resistor
only dissipates power when reflections arise. In reality, there can be no perfect match between
the two stages. A voltage difference will therefore always appear across the resistor. This will
only change the current levels through the load by a small amount. To reduce extra power
absorption, the replica stage is scaled with a factor (K) of 3. The scaling involves increasing the
resistors and decreasing the currents. The voltage drop of the VCSEL is imitated by a diode
connected transistor and the base-emitter voltage of the buffer. A bias current is normally
added to the replica stage. In this case however, it is obsolete because there is an offset
between the DC-voltages of the two stages that is almost equal to the voltage drop caused
by the bias current. Figure 2.11 shows the resulting eye diagrams and Figure 2.12 displays
the voltages at both sides of RT . The eye is independent of RV . Compared with the passive
version, the overshoot is reduced due to the low current levels. The voltage drop over RT sends
an extra current of 400 µA to the laser diode. This is neglible and will not distort the current
levels as shown in the eye diagram. The replica stage delivers a 20 % increase of the power
dissipation in comparison with the basic driver which now totals to 126 mW.
Vcc
D1
Vcc
D2
LV
D4
K.Rdu
K.Rdu
CV
D3
RT
RE
TL
Rdu
Q1
Q2
bit0
bit0 bit1
IM/K
Q3
Q4
2IM/K
bit1 bit0
Q5
VD
RD
IB1
Q7
Q6
RV
Q8
bit0 bit1
IM
bit1
2IM
Figure 2.10: Driver with active back termination
Figure 2.11: Eye diagram of an active back termination driver with RV =30 Ω and 50 Ω
It can be concluded that when using a TL, the active back termination is preferred above the
passive variant or the basic driver. Double reflections are eliminated to preserve the quality
of the eye. This is achieved with only a small increase of power consumption. The main
disadvantage is a doubled component count and area size. It will also be more challenging to
layout the circuit. The only parameter left to optimize is the overshoot caused by the package
inductance. Neither of the previous topologies solved this. Hence, a network must be added
which converts the inductive impedance of the load to a near real impedance. This can be
Chapter 2. Optical transmitter
19
Figure 2.12: Voltage at both sides of the termination resistor RT
accomplished by attaching an RC-network at the end of the TL [9], see Figure 2.13. The value
of CF can range from 0.5 to 10 pF and the value of RF from 30Ω to 75Ω. This depends on the
type of laser and corresponding package. It should therefore be optimized in the field by trial
and error. To have a better understanding of the influence of both components, the impedance
of the load is plotted in Matlab for different values of RF and CF , see Figure 2.14 and 2.15. For
better comparison, the impedance without network is also plotted. The phase of the original
impedance keeps rising with frequency as expected with an inductance. The overshoot will thus
become more pronounced as the bitrate increases. The resistor RF only has influence from 500
MHz. From there on, a decrease in resistance makes the impact of the capacitance larger.
Considering the fact that the fundamental frequency is limited to 625 MHz in this application,
the impact of RF is limited. The capacitor CF determines the phase already at low frequencies.
Increasing its value reduces the phase and makes the impedance more capacitive. A capacitive
load slows down the edges thereby reducing overshoot. However, one has to prevent undershoot
when the phase leads too much. A good starting point for ADS simulations is found to be in
the middle of the curves, i.e. 30Ω and 2pF. Because the characteristics of the VCSEL RV , CV
and LV can vary, it is interesting to show the behaviour of the converted impedance when one
of these parameters is sweeped. This is shown in Figure A.1 to A.3 of Appendix A where CF is
2pF and RF is 30 Ω. From these plots, it can be concluded that the junction capacitance has
no influence at all. An increase in inductance or decrease in RV will result in more overshoot
because the damping factor reduces. However, the phase remains negative, so the amount of
overshoot will be limited. The matching network should be dimensioned such that the impact
of the changing parameters is minimized. This can be achieved by avoiding extreme values.
A simulation in ADS of the active back termination driver with the chosen matching network
is displayed in Figure 2.16. The eye reveals less overshoot than in Figure 2.11 as expected for
both cases of the VCSEL’s resistance. The eye quality has improved, but only marginally
because the results were already good.
The last optimization or version of the driver topology is in fact the most simple one:
eliminating the transmission line feed. This way no double reflections can occur so there is
also no need for increased circuit complexity like back termination. This solution however
has its limitations. The distance between the VCSEL and the driver should be kept to a
minimum because every mm adds approximately 1 nH of inductance. The upperbound on
λ
the distance is 20
. Beyond this bound, the use of controlled impedance lines is necessary to
avoid reflections. This distance measures 12 mm for 1.25 GBd. The matching network is
unavoidable in this circuit to compensate for the larger inductance. Figure 2.17 demonstrates
20
Chapter 2. Optical transmitter
VD
LV
CV
RV
IB
TL
RD
RF
CF
Figure 2.13: Insertion of matching network in the driver circuit
that the inductance causes ringing and large overshoot. This problem disappears with the
matching network inserted. The eye is similar in quality compared to the earlier circuits but
with much less complexity accomplished.
2.2.3
Layout of the circuit
Based on the simulation results, there are two architectures that perform satisfyingly. The
circuit with active back termination and the one without a TL-feed, both with corresponding
matching network. The layout of the circuit will determine which topology is preferred. The
distance from the VCSEL to the driver can be chosen arbitrarily since there are no specific
requirements on the position of it on the printed circuit board. When placing the laser diode
on the opposite side of the transistors, the pins of the package can be located very close to RD .
The trace inductance is minimized this way, so there is no need for a TL to compensate for
these parasitics. The version without back termination seems the most efficient one in this type
of application. There are specific rules when laying out driver circuits to avoid performance
degradation. In Figure 2.18, the signal flow of the electrons is visualized. It is important to
know the behaviour and the followed path of the signal when the differential pair switches.
This knowledge can be used to maintain a balanced load both in phase and magnitude which
prevents offset voltages [9]. These offsets can cause PWD and are to be avoided. The current
is interchanged between the legs through the decoupling capacitors which short the current to
ground. This ground plane must be uninterrupted such that the signal follows the shortest
possible path from B to C . To minimize the delay between the two loads, the distances AB
and CD have to be equal in length. A possible delay can be translated into an unbalanced
phase of the impedances.
The final boardlayout can be seen in Figure 2.19. When looking at the top of the board, one
notices that the two loads are not equal in length. This is not perfect, but it was unavoidable
because the diode-connected transistors take alot of space in the left leg. However, during the
testing period these diodes malfunctioned rather quickly and were ultimately removed. This
makes both lengths equal again, but now there exists a voltage difference between the two legs.
This is translated in an impedance mismatch and is also not optimal. When looking at the
bottom, the uninterrupted groundplane is respected in the design. Decoupling of the power
supply was done with different capacitors in parallel to cover a wide frequency range. The
differential signal is fed to the driver by a coupled transmission line. The return current does
not flow in the groundplane underneath but on the other side of the double TL. However, the
electromagnetic fields for the common mode can be disturbed when an interruption exists in
21
Chapter 2. Optical transmitter
Bode Diagram
90
original
R =20Ω
F
R =30Ω
F
RF=40Ω
RF=50Ω
RF=60Ω
45
Phase (deg)
RF=70Ω
0
−45
7
10
8
9
10
10
10
10
Frequency (Hz)
Figure 2.14: Phase of the impedance for different RF and CF =2 pF
Bode Diagram
90
original
C =0.5pF
F
CF=1.0pF
C =1.5pF
F
CF=2.0pF
CF=2.5pF
45
Phase (deg)
CF=3.5pF
0
−45
7
10
8
9
10
10
10
10
Frequency (Hz)
Figure 2.15: Phase of the impedance for different CF and RF =30 Ω
Figure 2.16: Eye diagram of the active back termination driver with matching network CF =2 pF and
RF =30 Ω for RV equal to 30 Ω and 50 Ω
Chapter 2. Optical transmitter
22
Figure 2.17: Eye diagram of a driver with no TL feed without and with the previous matching network
and RV = 30 Ω
the ground surface. It is therefore designed to be continuous. The length of the coupled lines
must be perfectly equal because otherwise the driver would have different switching speeds
depending on the state of the signal. The distance between the lines is calculated for an odd
mode impedance of 50 Ω. The TL is terminated with 100 Ω such that at differential mode
the signal sees its characteristic impedance to ground. Ground was removed aside the TL
to prevent that it behaves like a coplanar waveguide because else the odd impedance would
be incorrect. The distance between ground and the TL has to be at least a little more than
the thickness of the line itself. There are two pairs of differential signals to enable 4-PAM
modulation. It is very important that both signals arrive at the same instance at the driver,
otherwise a distorted pulse would be created. The design of the second coupled line is therefore
a perfect replica of the first one.
The transistors in the differential pair are from Infineon, type BFP405. These are SiGe
bipolar transistors suited for low current applications. Their transition frequency fT varies
from 10 to 15 GHz depending on the switched current. A general design rule is to choose
transistors that have an fT more than seven to ten times higher than the working frequency.
In this application, the maximum fundamental frequency is 625 MHz such that the above rule
is obeyed. Because the driver works with strong signals, there is no need to choose devices
with a low noise figure (NF). The BFP405 has a NF of 1.1 dB and situates in the low end
of the Infineon product line to reduce the cost. The current mirrors are provided by a two
transistor array from NXP, the BC847BS. Because they are located on the same wafer, good
current matching can be obtained. The bias current for the VCSEL can be trimmed with a
potentiometer. The modulation currents are fixed.
Figure 2.18: Electron flow when the driver switches its tailcurrent from the right to the left leg
23
Chapter 2. Optical transmitter
Differential input 2
Ground current return flow
Driver + load
Differential input 1
Figure 2.19: Top and bottom layout of the driver pcb
2.2.4
Measurements
The two pairs of differential inputs for the driver are provided by a PRBS generator from Agilent, type E4862A. The maximum bitrate of this device is 3.35 Gbps which is sufficient for this
work.The oscilloscope is from Tektronix and has a bandwidth of 1 GHz with a sample rate of 4
GS/s. The scope must be triggered by the clock output from the generator because the instrument cannot trigger itself from the PRBS sequence. The eye diagram can be constructed by
measuring the voltage across RD with an active probe. The circuit was initially implemented
with the component values calculated from the simulations including the matching network.
A first measurement at 400 Mbps with NRZ showed severe ringing. This could not be completely eliminated by increasing Cf or RD and in fact created an increased fall time due to the
capacitive load. A 4-PAM signal was created by adding a delay of 100 periods between the
two differential signals. The eye height was unfortunately degraded too much because of the
ringing, Figure 2.20. It was discovered that this effect disappeared when putting a finger on
the transistor which acted as a hot point. The excessive inductance in the driver interface to
the laser caused an oscillation with the parasitic capacitors. Since a finger adds capacitance to
a circuit, a capacitor of 0.5 pF was inserted between collector and emitter of each transistor.
In differential mode, the emitter is connected to ground. The added capacitance creates in this
case a direct bandwidth limitation which suppresses the oscillation. The matching network
was removed from the board because this created undershoot. The conclusive results can be
observed in Figure 2.21 and 2.22.
A few remarks can be made when looking at the NRZ signal. First of all the rise time is
longer than the fall time because of the extra capacitance added. This offsets the crossing level
below the midpoint resulting in PWD. The maximum bitrate is limited to 900 Mbps because
of the bandwidth reduction. Another consequence of this measure is a decreasing eye width
when the current increases. This can be observed in the 4-PAM wavefoms where a maximum
baudrate of 600 MBd is achieved.
Chapter 2. Optical transmitter
24
Figure 2.20: NRZ eye diagram: PRBS of 27 − 1, 400 Mbps and 4-PAM eye diagram: PRBS of 231 − 1,
400 MBd
Figure 2.21: NRZ eye diagram: PRBS of 231 − 1, 600 and 900 Mbps
2.2.5
Revision
Because the target of 1.25 GBd is not possible with the current prototype, a redesign was
necessary. First of all, the cause of the ringing must be eliminated such that no bandwidth
reduction techniques have to be applied. To find the source of this problem, the layout was
simulated in ADS where transmission lines represent the high speed traces. The package of
the BFP405 transistors were also included. Figure 2.23 is very similar to the measured results.
The ringing is thus mainly caused by the parasitics of the transistor. These form a resonating
circuit with the parasitics of the tail current source which leads to a modulated current. The
quality factor (Q) must be heavily reduced to suppress the ringing. This can be realized by
implementing the current mirrors with emitter degeneration. The emitter resistor is located
directly in series with the parasitic L and C, thus reducing Q in a direct way. Another measure
that can be taken is to choose a smaller package of the transistor, i.e. TSFP4 instead of
SOT343. The ringing completely disappeared with the suggested new circuit. The inductance
L was lowered to 2 nH because this now only represents the leads of the VCSEL. By minimizing
the interconnect distance to 1 mm, no reflections occur up to the 11th harmonic of the square
wave. The performance of the new circuit is evaluated for both NRZ and 4-PAM, see Figure
2.24. Increasing the damping resistor RD to 70 Ω makes the matching network obsolete. The
NRZ signal was obtained by switching 3IM .
The layout of the new driver is nearly identical to the previous one seen in Figure 2.25,
except that minimization was a primary target. It is worth noting that the return path via
the groundplane between the two branches is halved in distance. The traces to the tail current
sources IM and 2IM are now also equal in length. The modulation currents are trimmable
next to the bias current to maximize eye opening in 4-PAM mode. Because the performance
of this new prototype must be maximized, a closer look was taken at the decoupling of the
high frequency signals. Because the currents in the driver are created from digital signals, the
25
Chapter 2. Optical transmitter
Figure 2.22: 4-PAM eye diagram: PRBS of 231 − 1, 400 and 600 MBd
Figure 2.23: Simulation of the realistic driver circuit without and with matching network
frequency content is very broadbanded. The power spectral density of the signal is mostly
related to the rise time and not to the bitrate itself. A certain frequency Fknee determines
an upper bound where most of the spectral content of the pulse is available [12]. Providing
decoupling up to Fknee , the waveform can be switched undistorted. The author of [12] calculates
this bound from the 10-90 % rise time, whereas in optical communications the 20 to 80 % rule
is mostly applied. This can however be converted assuming the pulses are Gaussian. A τ20−80
of 100 ps is given as a requirement for a 2.5 Gbps system in [2]. The circuit in this work
switches at half the speed such that the rise time can be increased to 200 ps. Using equation
2.1, decoupling must be provided up to 1.6 GHz.
0.5
0.5 · 0.658
τ10−90
τ20−80
Fknee = 1.6 GHz
Fknee =
=
(2.1)
There are three different strategies to provide decoupling over a broad frequency range, but
all of them have in common that multiple capacitors must be used in parallel. The first method
is to use different values such that their resonant frequencies are divided over the range. A
high impedance peak arises at some frequencies due to anti-parallel resonance of the different
caps. This is its main disadvantage, but a wide band can be covered with a limited number
of components. The second strategy uses only one value. By placing multiple in parallel,
the impedance is lowered linearly and thus the range can be covered without any unwanted
peaking. To reduce the amount of capacitors, the low end can be provided by one big extra
capacitor which leads to the third solution. Now only one impedance peak occurs. A bode
plot was calculated with Matlab for the three possibilities in Figure 2.26. The third technique
was used in the actual prototype because of the wide coverage with only one impedance peak.
26
Chapter 2. Optical transmitter
Figure 2.24: NRZ and 4-PAM simulation with the adjusted driver circuit
Figure 2.25: Top and bottom of the revised driver pcb
Only four capacitors of 220 pF and one of 68 nF in parallel seemed sufficient. Figure 2.27
demonstrates the effectiveness of the applied changes to the driver circuit. The NRZ signal
was measured across RD while switching maximum current, i.e. 3IM through the laser. The
ringing has completely disappeared now. An overshoot (OS) of 19 % seems at first quite high.
As this is mostly occuring on the highest level, it doesn’t degrade the eyes of the 4-PAM signal.
While allowing this phenomenon, no matching network was inserted to maintain symmetrical
rise and fall times. The speed of the circuit is now only limited by the transistors itself. A
baudrate of 800 MBd was measured with the 1 GHz probe and oscilloscope. Both instruments
have a rise time of around 300 ps. The rise time of the transitions in Figure 2.27 is a result
of the cascade: generator, driver, active probe and oscilloscope and measures 480 ps. The real
rise time of the driver can be calculated if one knows all the other τr and by using the general
equation 2.2 for a n-cascade [12]. This comes down to a calculated τr of 224 ps.
2
2
2
2
τr,tot
= τr,1
+ τr,2
+ ... + τr,n
(2.2)
To obtain more accurate results, the driver was also measured with a 4 GHz oscilloscope
from Tektronix with corresponding active probe of 3.5 GHz. Both are specified by a τr smaller
than 120 ps such that the influence on the driver is minimal. The eye diagram is given in
Figure 2.28. The measured τ20−80 amounts 120 ps which is even better than the one calculated
with 2.2. This corresponds to an Fknee of 2.7 GHz. A slowly damped oscillation of 2.9 GHz
is present at both levels. This was suppressed with the previous scope and transformed to
overshoot. The oscillation is probably caused by internal oscillation of the transistor due to its
package. The interconnection distance with the load is only 1 mm. Traces of this distance act
27
Chapter 2. Optical transmitter
Bode Diagram
40
5 different caps
8 x 680 pF
8 x680 pF+100 nF
30
20
Magnitude (dB)
10
0
−10
−20
−30
−40 6
10
7
8
10
10
9
10
Frequency (Hz)
Figure 2.26: Impedance vs frequency of different decoupling strategies
Figure 2.27: Active probe measurement at 800 Mbd of the driver with a PRBS of 231 − 1
as a TL from 7.3 Ghz. Since this is much higher than the spectral content of the waveform,
reflections due to impedance mismatch are out of the question. It is very difficult to remove
this oscillation without distorting the eye diagram. However, it will not cause any problems
at the receiver side because the combination of fiber, photodiode and TIA create a bandwidth
limitation. Therefore, the unwanted phenomenon is ignored. According to Optek, the rise
time of the VCSEL is stated at 100 ps. The transmitter which consists of the driver and the
laser diode is thus characterised by τr = 156 ps. This satisfies the condition set up by [2] of a
τr ≤ 200 ps to achieve 1.25 Gbps. The specifications for the driver circuit are summarized in
Table 2.3.
28
Chapter 2. Optical transmitter
Figure 2.28: Active probe measurement across RD at 400 Mbd of the driver with a PRBS of 25 − 1
Table 2.3: Specifications of the revised driver
Specs
τR
τF
Jpp
OS
Simulated
129 ps
146 ps
8 ps
6%
Measured
120 ps
120 ps
60 ps
19 %
Chapter 3
Opto-electronic receiver
The receiver is the most critical component in a communication system because it must cope
with weak signals while still guaranteeing a certain quality. In this context, it must convert
an optical signal into an electrical signal. Hence it is called an opto-electronic receiver. This
is typically implemented as a transimpedance amplifier (TIA). At first, the theory around this
will be discussed followed by a determination of the receiver specifications. From there on,
several TIA topologies will be presented. To conclude this chapter, a few post amplifiers are
studied to increase the amplification of the receiver.
3.1
3.1.1
Transimpedance amplifier theory
Shunt-shunt feedback topology
A transimpedance amplifier typically is implemented as a shunt-shunt feedback circuit around
an active component. Other variations are the high or low impedance front ends which are
respectively suited for very large and very small bandwidths because of their passive nature [2].
Because this system works at 1.25 GBd it settles in the middle and the feedback topology seems
most efficient. To better understand the influence of the feedback on the receiver, analysis is
performed using block schemes from control theory, see Figure 3.1. The investigated parameters
are input impedance Zin , output impedance Zo and transimpedance gain Ztia .
ii
is
Zin
Ro
Ri
if vi
+ A.v
i
io
Zo
vo
Zo
ii
Zin
+ Z
- tia
vo
B.vo
Figure 3.1: Shunt-shunt feedback topology [13]
First an intuitive explanation will be made, followed by some mathematics. The output
29
Chapter 3. Opto-electronic receiver
30
voltage is sensed (shunt sensing) which creates an error at the input. If the amplifier has
high gain, nullator hypothesis can be applied. This means that the output voltage is changed
to eliminate the error at the input. Such behaviour is similar to a voltage source that is
characterized by a low output impedance. The feedback network will inject an error current at
the input (shunt injection) to change the output. Since most of the current will flow through
the feedback path, ii and also vi gets reduced. The current source thus sees a smaller impedance
at the input [14]. The whole system can be seen as a current controlled voltage source with
amplification Ztia . The equations can be easily found applying Kirchoff’s law.
vi
Ri
=
is
1 + AB · Ri
vo
Ro
Zo = |is =0 =
io
1 + AB · Ri
vo
1
AB · Ri
Ztia =
=
·
is
B 1 + AB · Ri
Zin =
(3.1)
(3.2)
(3.3)
A parasitic capacitance at a low impedance node has less effect on the bandwidth or stability
of a system. A general conclusion is that the loop gain AB ·Ri must be very high to reduce these
impedances. When AB · Ri is high enough, the transimpedance gain is completely determined
by the inverse of the feedback B. Maximizing the loop gain will be one of the dominant targets
in the TIA design cycle.
3.1.2
Small signal analysis
The shunt-shunt feedback topology is implemented with a voltage amplifier around a feedback
resistance Rf , see Figure 3.2. The photodiode detects the optical signal and converts it into an
electrical current. Remark that it has to be reverse polarized to perform this function. It can
be represented by a current source with a junction capacitance Cd . The used photodetector is
from Hamamatsu type S5973. It is characterized by a Cd of 1.6 pF, a responsivity (<) of 0.43
A/W at 850 nm and a bandwidth of 1.3 GHz at 5 V. Applying feedback to a circuit can always
cause instability. It is therefore very important to do a small signal analysis to determine the
location of the poles. The stability analysis used in this work is based on the Bode criterium
where the amount of phase margin dictates the safe region from instability. The Bode criterium
is only valid on the loop gain of the circuit. The circuit from Figure 3.2 must be converted
such that the loop gain can be easily read from it. Following analysis is based on the theory
presented in [15]. In this thesis however, a more general approach is considered where the input
impedance of the amplifier is finite. The theory is thus also applicable to bipolar technology
where in [15], it is only valid for FET circuits.
The input capacitance Ci is the sum of the diode and amplifier capacitance. Co consists
of the output capacitance of the amplifier and the input of the subsequent stage. To simplify
analysis, the feedback resistance Rf can be transformed at both input and output using current source substitution [16]. The transformation can be checked in Figure 3.3. Two voltage
controlled current sources arise, representing a feedback path Rvof and a feedforward path Rvif .
This small signal model can finally be converted into a block diagram to apply control theory
on, Figure 3.4. In applications where A · Rf >> Ro , the feedforward effect can be neglected.
The system with negative feedback will try to minimize the error current i . When applying
nullator hypothesis, the voltage amplifier is assumed to be ideal, i.e. infinite A, infinite Ri
31
Chapter 3. Opto-electronic receiver
Rf
vi
id
vo
A
vo
id
+
-
Ci
Rf
Ri
Ro
-A.vi
Co
Figure 3.2: Transimpedance amplifier
vi
vo
id
+
-
Ci
Ri
Rf
vo/Rf
Ro
-A.vi
Rf
vi/Rf
Co
Figure 3.3: Small signal model of a TIA after transformation
and zero Ro . This makes the error current zero and all diode current flows directly into Rf .
The loop gain LG is determined by multiplying each block in the loop, setting the input to
zero, neglecting feedforward and assuming that Ro < Rf . The transimpedance gain in nullator
operation is given by H(∞). Combining H(∞) and LG in 3.6 gives the closed loop transfer
function Ztia . It is clear that with infinite LG, Ztia is maximized and equals Rf . Remark that
equation 3.3 of the general theory resembles equation 3.6 of the detailed analysis. The midband
transimpedance gain is expressed as Ztia,0 .
Figure 3.4: Block diagram of a TIA
32
Chapter 3. Opto-electronic receiver
LG =
H(∞) = Rf
Ri
−A · Ri +Rf
(1 + s (Rf //Ri ) Ci ) · (1 + sCo Ro )
LG
Ztia = Rf ·
1 + LG
ARi · Rf
Ztia,0 =
Rf + (1 + A)Ri
1
fd =
2π (Rf //Ri ) Ci
1
fnd =
2πRo Co
Ri
A · Ri +Rf
A
f0dB ≈
=
2π (Rf //Ri ) Ci
2π · Rf Ci
(3.4)
(3.5)
(3.6)
(3.7)
(3.8)
(3.9)
(3.10)
Based on 3.5, the LG has two real poles at frequencies fd and fnd . The stability depends
upon the location of the non-dominant pole fnd and the unity-gain frequency f0dB . The phase
margin PM is directly related to the ratio of the two, e.g. 72◦ PM occurs when fnd = 3 · f0dB .
More stability means a higher bandwidth of the used amplifier for the same gain-bandwidth
product.
f
f
− arctan
fd
fnd
π
f0dB
φLG (f = f0dB ) = − arctan
2
fnd
fnd
P M = arctan
f0dB
φLG = π − arctan
(3.11)
(3.12)
(3.13)
The bandwidth of the TIA is the last parameter to define. Rather than trying to extract
it from the closed loop transfer function, a much easier way is looking at the impedance seen
at the input Zin . This fixes the bandwidth together with the input capacitance Ci . Zin can
be calculated from 3.1 or from Figure 3.3, both give the same result but the last option will
be chosen here. By referring vo to the input, the dependable source Rvof can be replaced with
R
a resistor Af . Eventually, equation 3.15 states that the bandwidth is maximized or that Rf is
maximized for the same bandwidth by increasing gain A. A commonly used measure to compare
different TIA’s is the transimpedance bandwidth (ZBW), similar to the gain bandwidth of a
voltage amplifier. An expression is made for the two different technologies FET and bipolar.
For the FET version, ZBW doesn’t depend on the feedback resistance. Note that for FET the
ratio ff3dB
equals one whereas for BJT, it is higher than one. It is clear now that designing a
0dB
TIA with BJT is fairly different than with FET technology.
33
Chapter 3. Opto-electronic receiver
Rf
Zin = Ri //
(1 + A)
1
f3dB =
Rf
2π · Ri // 1+A
Ci
(3.14)
(3.15)
ZBW = Ztia,0 · f3dB
A
M OS : ZBW =
2π · Ci
Ri + A · Rf
BJT : ZBW =
2π · (Rf + A · Ri )Ci
(3.16)
(3.17)
(3.18)
Remark that the previous analysis was based on a system with real poles producing a
critically damped response. In reality, the poles will likely be complex conjugated such that
the response is underdamped. The design parameters with such a second order system are the
natural pulsation ωn and damping ratio ζ. This work will not elaborate on the mathematics,
but only interpret the results obtained in [15]. A ζ smaller than one leads to a higher bandwidth
than given in 3.15. The price to pay is overshoot which degrades the eye. A relationship exists
between ζ, fnd , f0dB and the desired response. This is given in Table 3.1. A PM of 63◦
corresponds to a Butterworth response which has a maximally flat frequency response. A
Bessel response has a PM of 72◦ and is characterized by a maximally flat group delay (GD).
Remark that with the last response the bandwidth extension is nearly absent. The design
methodology for the TIA in a later paragraph will be based on a Bessel response because of
its marginal OS and flat GD (importance of GD will be explained later). The only condition
is that the bandwidth of the voltage amplifier has to be high enough to space the two poles fd
and fnd 3 · A from each other for satisfying a Bessel response.
Table 3.1: Design parameters for second order system with complex conjugate poles [15]
ζ
1
√2
2
√2
3
2
3.2
Condition
fnd = f0dB
fnd = 2f0dB
fnd = 3f0dB
BWtia
1.6 · f3dB
√
2 · f3dB
1.07 · f3dB
OS
16%
4%
0.4%
PM
45◦
63◦
72◦
Noise analysis
The transimpedance amplifier is the first element in the receiver chain. Its noise characteristics
will have a direct influence on the sensitivity of the receiver. Noise analysis of the TIA is a
critical step in the design process because certain parameters of the circuit can be changed to
decrease the noise. A noisy TIA can be represented by a noiseless TIA with a current noise
source irms
at the input. Both models produce the same output-referred noise voltage vrms
n
n .
rms
In literature [2], [15], different expressions for the input-referred noise current in and for the
input-referred noise current spectral density di2n,tia are constructed for both a bipolar and a
FET front end. The contribution from the feedback Rf and the input transistor is considered
dominant. Thermal noise from Rf is white and can be minimized by increasing its value.
34
Chapter 3. Opto-electronic receiver
This is equivalent by trying to maximize the transimpedance gain. The transistor produces a
white noise component and an f2 component. Its contribution will therefore be significant for
higher frequencies. The transistor at the input must have a very low NF to improve sensitivity.
For high frequency applications, one can choose between a high electron mobility transistor
(HEMT) or a SiGe BJT. According to [2], the HEMT performs by far the best at lower data
rates (100 Mbps), but the difference becomes marginal with increasing speed. ADS simulations
of the TIA will reveal which one is preferred.
The equations for irms
can be used for noise optimization [15]. If all the SPICE parameters
n
of the transistor can be manipulated, e.g. in IC design, one can choose the dimensions of
the transistor such that irms
is minimal. Because this work uses discrete transistors, the only
n
parameter that can be optimized is Rf . For this reason, extensive mathematical analysis of
noise parameters is obsolete. This job is handed over to the simulator ADS.
√
ADS can calculate the noise voltage expressed in V/ Hz of an annotated node during AC
simulation [17]. This node is the output of the TIA. All sorts of noise contributors are extracted
from the SPICE models and the influence of each contributor to the output can be shown. It is
important that that noise simulation bandwidth is set to 1 Hz for calculating spectral power.
The final simulation result consists of a matrix of noise voltage and the corresponding frequencies. The following equations convert the simulated noise to irms
n [15]. Another parameter that
often is used in literature
is the averaged input-referred noise current density in,tia . This is
√
expressed in pA/ Hz. It is very useful to compare different TIA’s because it is independent
of the 3 dB bandwidth.
dvn2 = dvn,ads · dvn,ads
sZ
∞
1
dvn2 · df
irms
=
n
Ztia,0
0
in,tia = √
3.3
3.3.1
irms
n
BWtia
(3.19)
(3.20)
(3.21)
Specifications
Sensitivity
One of the most important specifications of a communication system is the BER. This puts a
constraint on the minimum received power, called sensitivity of the receiver. This sensitivity is
related to the produced noise of the TIA. It is therefore critical that the noise floor is minimized.
Because the BER is mostly a specified number, it can be useful to elaborate on the relationship
between the two parameters. Analysis is done for both NRZ and 4-PAM as this reveals the
tradeoffs between the two modulation schemes. The equations are based on [18] and [11].
To abstract the modulation scheme from the analysis, an assumption is made that symbols
are sent instead of bits. A first step then is to determine the symbol error probability. This is
the probability that an arbitrary detected symbol â(k) doesn’t correspond to the sent symbol
a(k). In equations 3.22 to 3.26, M stands for the number of bits that represent a symbol.
35
Chapter 3. Opto-electronic receiver
Pm,n is the conditional probability that a given symbol am is detected when an is sent. Since
â(k) is actually the sent symbol superimposed with noise n(k), incorrect detection occurs when
the noise surpasses a certain level called the decision threshold. This noise follows a normal
distribution with zero mean and standard deviation σ, i.e. n(k)∼ N(0, σ 2 ·δ(k)). Given the fact
that all symbols are uniformly distributed, the symbol error rate can be seen as the average of
the conditional probabilities.
Now this is cleared out, a transformation can be made from symbols to bits to find the
expression for the BER. The BER is by definition the average amount of incorrect received
bits/symbol divided by the number of bits sent per symbol. The number of bits/symbol is
represented by the factor log2 (M ) in the denominator. The rest of the formula is fairly similar
to the symbol error rate except for the term Nm,n . This accounts for the amount of bits that
differ in position between am and an . It can thus be concluded that the allocation of M bits
to a symbol has an effect on the BER. This effect is minimized using Gray coding where only
one bit differs between adjacent symbols, meaning that Nm,n = 1.
P r [â(k) 6= a(k)] =
M
−1
X
P r [â(k) = am | a(k) = an ]
(3.22)
n=0,m6=n
Pm,n = P r[â(k) = am | a(k) = an ]
(3.23)
= P r[a(k) + n(k) = am | a(k) = an ]
(3.24)
P r [â(k) 6= a(k)] =
1
BER =
log2 (M ) · M
1
M
M
−1
X
Pm,n
(3.25)
Nm,n Pm,n
(3.26)
m,n=0,m6=n
M
−1
X
m,n=0,m6=n
The modulation scheme of the symbols with NRZ is visualized in Figure 3.5. The two
symbols are spaced from the decision threshold with a distance d. Using equation 3.26 leads
to the following BER (3.27) where the noise contribution is already inserted. Since n(k) is
normal distributed, the probabilities in the equation require an integration to infinity. Since
this cannot be calculated in a straightforward way, a transformation must be applied to a new
function that can be numerically evaluated.
1
BER = (P r[n(k) < d] + P r[n(k) > −d])
2
(3.27)
This is the Q-function which is derived from integrating a normal distributed density function, e.g. fX (x) and performing a substition such that σ is eliminated from the expression in
the integral. The Q-function thus performs an integration to infinity from a density function
36
Chapter 3. Opto-electronic receiver
with zero mean and unity σ.
2
1
−x
fX (x) = √
exp
2σ 2
2πσ
2
Z ∞
1
−x
√
P r [X ≥ x0 ] =
dx
exp
2σ 2
2πσ
x0
2
Z ∞
1
−x
√ exp
x = w · σ →=
dx
x0
2
2π
σ
= Q (w)
P r [X ≥ x0 ] = Q
(3.28)
(3.29)
(3.30)
(3.31)
x 0
σ
(3.32)
Applying 3.32 to the expression 3.27, a final result can be obtained for the bit error rate for
NRZ. The error probability is determined by two contributions of noise since the tails of the two
distributions cross each other at the decision threshold. For simplicity, it is assumed that the
two levels have equal noise characteristics. This is justified when the amplifier noise is dominant
above the photodetector noise, which is nearly always satisfied [2]. For more practical use, the
variables can be translated to voltages. The distance between the two symbols is equivalent to
rms
the peak to peak output voltage swing vpp
s and the standard deviation to vn .
1
BER =
2
d
−d
Q
+1−Q
σ
σ
d
=Q
σ
vspp
=Q
2 · vnrms
(3.33)
(3.34)
(3.35)
To calculate the optical sensitivity Psens , the argument of the Q-function, called the Personick Qp must be numerically evaluated for a given BER. This task is fulfilled using Matlab.
The voltages are converted to currents by Ztia,0 . The optical power is related to the < of the
photodiode. The average optical sensitivity Psens is a more practical number for comparing
different receivers. P1 and P0 represent the high and low optical levels.
< · (P1 − P0 )
BER = Q
(3.36)
2 · irms
n
2 · Qp · irms
n
(3.37)
Psens =
<
Qp · irms
n
Psens =
(3.38)
<
The analysis for a 4-PAM modulated signal is very similar to the previous example, but a
little more complex. Figure 3.6 shows the noise distributions for all the levels. Note that level
a1 and a2 suffer from two noise contributions which will make the error rate higher than with
NRZ. The distance d and d’ is a measure to compare the relative distance from the symbols for
different modulation formats. To express the BER in a way that it can be directly compared
for the two formats, the distance d’ is written as a function of d. The most logical choice would
37
Chapter 3. Opto-electronic receiver
a0
-d
a1
d
0
Figure 3.5: Gaussian distribution of the noise for NRZ
a0
-3d'
a1
-d'
0
a2
d'
a3
3d'
Figure 3.6: Gaussian distribution of the noise for 4-PAM
be to divide the NRZ signal in different levels with equal spacing to create 4-PAM. This leads
to d0 = d3 .
Using again the general formula 3.26 for determining the BER and only considering the
influence from adjacent levels, the final result can be obtained (3.40). The value Q0p in 3.41 is
different from Qp because the scale factor 3/4 is included. By observing the two sensitivities,
one can derive the power penalty introduced by 4-PAM compared to NRZ. If a BER of 10−3
is specified, the sensitivity of a 4-PAM system is 4.65 dB worse than with NRZ. This can be
interpreted in a more design oriented way, i.e. the input-referred noise current of the TIA must
be 4.65 dB lower to achieve the same sensitivity as for NRZ. This makes the design of a receiver
for use with multilevel modulation more challenging. The derivations in [11] even result in a
power penalty of 4.93 dB. It seems that the scale factor log1 M is missing there. The derivation
2
in this work is mostly based on [18]. The equation 3.42 will therefore be used throughout the
entire thesis. The simulated sensitivities for the different TIA circuits will all refer to 4-PAM
modulation.
38
Chapter 3. Opto-electronic receiver
BER =
1
{1 · P r[n(k) > d0 ] + 1 · P r[n(k) < −d0 ] + 2 · (P r[n(k) < −d0 ] + P r[n(k) > d0 ]}
2·4
3 d0
= Q( )
4 σ
3
d
= Q(
)
4 3·σ
vspp
3
)
(3.39)
= Q(
4 2 · 3 · vnrms
3 < · (P11 − P00 )
BER = Q(
)
(3.40)
4
6 · irms
n
6 · Q0p · irms
n
pp
Psens
=
(3.41)
<
3 · Q0p · irms
n
Psens =
(3.42)
<
Note that the previous stated power penalty is somewhat misleading. The sensitivity should
be compared with an NRZ bitstream at a double bitrate, i.e. 2.5 Gbps. This means that the
noise bandwidth is twice as high. Considering the fact that the transimpedance
should be
√
halved to achieve a double bitrate, the new irms
is
now
maximally
2
2
higher
when
assuming
n
a white noise spectrum. A new PP of 0.4 dB is found when 3.45 is inserted in 3.38 . A better
sensitivity is still possible with NRZ, but this puts more constraints on the design. A higher
power dissipation will also be needed since more bandwidth means more current.
s
irms
n
=
1
2
Ztia,0
Z
0
BWn
dv¯n2
df
(3.43)
s
rms0
in
3.3.2
Z 2BWn ¯2
22
dvn
=
2
df
Ztia,0 0
√ rms
rms0
in
≤ 2 2in
(3.44)
(3.45)
Group delay variation
In chapter one, it was mentioned that the amount of jitter should be minimized to reduce
sampling errors. Data-dependent jitter is in fact a spreading in time of falling and rising edges
of pulse trains with different frequencies. A parameter that relates the design of a TIA to jitter
is the group delay variation. The GD is the derivative of the closed loop phase response to the
frequency (3.46). A flat GD means that different frequencies are delayed with the same amount
of time or experience the same phase lag. The pulses in the eye diagram will cross the decision
threshold or crossing level at the same instance leading to minimal jitter. The GD variation
∆τ should be limited to ±0.1 UI, which amounts ±80 ps for 1.25 Gbps [2]. This variation
can be calculated by subtracting the minimum from the maximum GD over the specified TIA
bandwidth.
39
Chapter 3. Opto-electronic receiver
GD = −
∂φ
∂ω
(3.46)
In a two pole closed loop system, the GD is influenced by the location of the non-dominant
pole. This should be placed three times further than f0dB to obtain a Bessel response which
has maximally flat GD [2]. Because the non-dominant pole is actually the dominant pole of
the amplifier in open loop, transistors with a high fT should be chosen to minimize parasitic
capacitance (3.47).
fT =
3.3.3
gm
gm
=
2π · (Cπ + Cbc )
2π · (Cgs + Cgd )
(3.47)
Bandwidth allocation
When information is sent at a certain baudrate Rbd , the bandwidth of the receiver must be
chosen such that sensitivity is maximized. In the second chapter was said that the spectral
content of the pulses increases with a faster rising edge. For a τr of 200 ps and a baudrate
of 1.25 Gbd/s, the bandwidth BWrec should be equal to 34 · Rbd to preserve the waveform.
This way no ISI is introduced that degrades the eye opening. Lets assume that with this
strategy a reference sensitivity P√
sens,0 is achieved. This seems a good approach except that
the noise voltage increases with BWrec . More noise is superimposed on the signal and this
also degrades the eye and the sensitivity. One could opt for the other way around, i.e. keep
the bandwidth limited to 13 · Rbd to reduce the noise with 6 dB. However, the amplification
of the fundamental frequency Rbd /2 is reduced with 6 dB in comparison to bitstreams with
longer periods assuming a Bessel response. The eye height is reduced with 50% resulting in
the same Psens,0 . An optimum must be found between noise and ISI. This is achieved
with a
√
BWrec = 23 Rbd [2]. The eye height is preserved and the noise is reduced with 2. An optical
sensitivity of Psens,0 -1.5 dB is accomplished. Another allocation is used in [19],[6] and [20]
where they set BWrec = 21 Rbd . This creates a 3 dB attenuation of the fundamental component,
but a reduction of 4.25 dB noise voltage. Finally, a sensitivity of Psens,0 - 0.64 dB is obtained.
From these four strategies, the third one is chosen because this gives the best results.
The receiver is a cascade of multiple blocks that all have a specific bandwidth. This cascade
must obey the previous design rule of BWrec = 23 Rbd . Different bandwidth allocation strategies
can be applied using formula 3.48 [2]. The receiver consists of the photodiode, TIA, post
amplifier (PA) and decision circuit where the last one isn’t covered in this thesis. One can choose
to dimension the TIA slightly higher than BWrec and the rest at a much higher bandwidth,
e.g. 3 GHz, to obey the rule. This way noise performance and transimpedance of the TIA is
optimized. However the photodetector is a fixed component and has a bandwidth of 1.3 GHz
at 5 V power supply. This will put a heavy requirement on the TIA and PA, e.g. BWtia =1.3
GHz and BWP A =3 GHz. However, it becomes very challenging to design the amplifier with a
much larger bandwidth than that of the TIA when high bitrates are demanded. A compromise
is found when BWP A ≥ 1.2·Rbd which doesn’t degrade the receiver bandwidth a lot [2]. In this
work, the bandwidth of the post amplifier will be chosen around 3 GHz.
40
Chapter 3. Opto-electronic receiver
1
1
1
1
+
+
≈
2
2
2
BWrec
BWP D
BWtia BWP2 A
(3.48)
Since the receiver is built with discrete components, more parasitic capacitance is present
than with integrated solutions. This reduces the bandwidth because the spacing of the two
poles is limited since the amplifier pole is mostly determined by the available technology. For
this reason, the bandwidth of the TIA is chosen equal to the receiver bandwidth. Unfortunately,
the requested baudrate will not be achieved unless it is tolerated that the sensitivity becomes
worse. To measure the receiver without reducing the possible baudrate, the oscilloscope must
have a high bandwidth. The type TDS7404 from Tektronix has a bandwidth of 4 GHz. This
will cause no limitations, but makes the design of the receiver more challenging. Any high
frequency oscillation will be made visible. The chosen allocation strategy is depicted in Table
3.2. The maximum baudrate according to the optimal allocation after every component in the
receiver chain is also given.
Table 3.2: Bandwidth allocation and maximum baudrate after every component in the receiver chain
Component
photodetector
TIA
post amplifier
oscilloscope
3.3.4
BWcomp (GHz)
1.3
0.875
3
4
BWrec (GHz)
1.3
0.73
0.71
0.69
Rbd (Gbd)
1.9
1.1
1.0
1.0
Dynamic range
The optical dynamic range DRopt of a receiver specifies how well the system can cope with weak
and strong signals. The lower bound is given by Psens in equation 3.42. The upper bound is
determined by the maximum input power where linear operation is still guaranteed (Plin
max )
lin
[2]. Similar to the 1-dB compression point in the RF-domain, Pmax is the power for which the
transimpedance gain is reduced with 1 dB. Most of the photodiode current flows through Rf
and creates a voltage drop. Eventually, this pushes the current source from the output buffer
into saturation resulting in gain compression.
The dynamic range will be of the same order in a wide variety of circuits. An increase of Rf
makes the design more sensitive, but saturation occurs faster and vice versa. A way to increase
this range is presented in [21]. By dividing the feedback resistor in two smaller parts, Plin
max can
be increased with the same noise performance. Because this thesis is situated at board level,
the conventional TIA structure is preferred because of its simplicity.
3.4
Single ended vs. differential
A circuit can be implemented single ended or differentially, but there are a lot of differences towards design and performance. Choosing the right topology for the application is an important
first step of the process because it can save a lot of time and money when done correctly. During
41
Chapter 3. Opto-electronic receiver
education, textbooks always prefer differential circuits above single ended. Main reasons are
excellent immunity against power supply noise and tolerance against device offsets due to the
cancelling function of differential output. In normal cases, it also provides a double dynamic
range and output swing. Another advantage is the availability of two inverted outputs. This
way one can always apply negative feedback by cross coupling output to input. A multistage
amplifier can be built with two stages whereas in the single ended case, this had to be an odd
number. Since more gain means more transimpedance or more bandwidth, this can be very
useful. Interfacing with the postamplifier is also easy because the latter is often implemented
differentially [2]. A drawback is a doubled amount of components and therefore also a factor
√
two increase of output noise power. The output rms noise voltage is thus increased with 2.
However, the SNR is 1.5 dB better because of the doubled output swing. These properties
are valid for fully differential circuits where the condition holds that upper and lower side are
symmetric.
When looking at Figure 3.7, it can be seen that the right circuit isn’t perfectly symmetric.
The photodiode is a single ended device because it’s current is unipolar. To mimic the input
load, a capacitance Cx equal to Cd is placed at the inverting input. This configuration is called
a balanced TIA. Because of the single ended input, the differential output signal isn’t doubled
in amplitude. As a consequence, the sensitivity has become worse with 1.5 dB. All the other
advantages still exist, which makes the balanced TIA very popular in IC design. The latest
innovations in circuit design are a differential photodiode, which eliminates the shortcoming of
the balanced version.
In this thesis, the circuit design is with discrete components at board level. Each transistor is
packaged as a single element such that different transistors show large variations in parameters.
This breaks the symmetry in differential circuits and reduces the effect of noise immunity. Many
of the positive differences with single ended now vanish. The preliminary study proves that a
single ended design is more attractive at board level.
Rf
vi
id
vo
A
Cd
vip
id
vin
Rf
Cx
+
-
von
-
A
vop
+
Rf
Figure 3.7: Single ended and balanced implementation of a TIA
3.5
3.5.1
Characterization of the receiver
Measuring BER from eye diagram
In an earlier section, there was an equation (3.40) derived for calculating the BER based on
rms
vpp
s and vn . These quantities can be measured easily with an oscilloscope that displays an
eye diagram [2]. Since the noise of the signal is normally distributed, a histogram measurement
rms
with an oscilloscope can calculate the mean vpp
s /2 and standard deviation σ (=vn ). To obtain
an accurate result, the presence of ISI due to bandwidth limitation should be included in the
calculations. The measured σ will be higher when ISI occurs which implies a misinterpreted
42
Chapter 3. Opto-electronic receiver
noise performance. Therefore, σ should be measured at a baudrate low enough when ISI is
absent. Determining vpp
s /2 with the histogram at the desired speed automatically includes the
presence of ISI. One can also do this manually with cursors, as shown in Figure 3.8 for the left
plot.
This image shows two eye diagrams of NRZ with corresponding histogram and of 4-PAM
generated with the built bipolar CE TIA (see later), driver and POF cable. The displayed
distribution depends on the location of the histogram box limits. For accurate results, the box
must be set at maximum eye height. The width is chosen narrow and the height is extended to
the middle of the diagram that corresponds to the decision threshold. The figure shows a σ of
2.4 mV and a mean of 27.4 mV. For NRZ signals, this is associated with a Q of 11.4 and a BER
of 10−30 . Note that no ISI occurs in this example which makes the histogram measurement
correct. ISI can be recognized when the eye becomes smaller than the top and low level.
The same method can be applied to 4-PAM waveforms. The histogram box has to be
set at the top or lowest level to measure σ at sufficient low baudrate, Figure 3.8. The mean
is determined by measuring the peak to peak voltage swing of the smallest eye (vpp
s ’) at the
desired speed and dividing by two. Note that in contrast with 3.40, a division by three is
obsolete since this is only valid when the peak to peak value of the minimum and maximum
level is measured.
Figure 3.8: Histogram measurement and eye diagram of a built receiver at 900 Mbd and a PRBS of 7
This technique will be used in chapter 4 where the complete system is tested under different
circumstances. It is possible to approximate the sensitivity of the receiver without the knowledge of irms
used in 3.42. The BER was specified at 10−3 in chapter one which relates to a Qp ’
n
of 3.0038. When irms
in 3.42 is expressed again as vrms
n
n , another form of Psens is constructed
that can be calculated directly from the results (3.49). Ztia,0 can be determined by simulation
with the actual Rf .
Psens =
9.0114 · vnrms
< · Ztia,0
(3.49)
43
Chapter 3. Opto-electronic receiver
3.5.2
Input-referred noise current
It has to be remarked that the method for determining the sensitivity of the receiver with a
histogram isn’t really accurate. It depends on too many parameters such as the transmitter,
fiber, type of PRBS and the baudrate. A more accurate result can be obtained by measuring
irms
which depends only on the quality of the receiver. The measuring process can be explained
n
by equation 3.20. One needs to integrate the spectral density of the output noise voltage. A
digital spectrum analyzer can perform this task pretty straightforward. The transimpedance
Ztia,0 is then calculated from simulations to eventually obtain irms
n . According to [14], an
input-referred noise current can be measured by providing an open circuit at the input of the
two-port system. The photodiode must be shielded to approximate an open circuit. The output
of the receiver is then connected to the 50 Ω input of the analyzer. To enable accurate noise
measurements, the basics of a spectrum analyzer were studied first [22]. A short summary
describes the significant parameters.
A spectrum analyzer is based on the superheterodyne principle. The bandwidth of the IF
filter is an adjustable parameter called the resolution bandwidth (RBW). A smaller RBW leads
to a higher resolution and lower noise floor, but also a longer sweep time. When the analyzer
has a sequence of RBW-filters, the sweep time can be reduced. A 1-3-10 sequence is faster
than a traditional 1-10 sequence. The first one can do a 1 kHz resolution with a 300 Hz RBW
and the latter needs 100 Hz RBW. A video filter is located in front of the ADC and performs
a smoothing function. It is a low pass filter of which the bandwidth is specified as the video
bandwidth (VBW). When measuring signals close to the noise floor of the spectrum analyzer,
it is recommended to choose VBW≤0.1·RBW to filter out variations of the internally generated
noise. Sample detection is most appropriate for displaying noise. Since noise is weak, the input
attenuator can be set to 0 dB. This way, the SNR is preserved. Setting the reference level close
to the expected noise power density makes the amplitude measurement more precise.
When all the aforementioned settings are optimized, it is still possible that the noise from
the receiver is below the noise floor. This is especially the case when irms
of a TIA is to be
n
measured. One can circumvent this by cascading a low noise wideband amplifier of which the
gain is known. For fast calculations, the contribution to irms
can be neglected. This solution
n
is already present when the receiver consists of a TIA followed by a post amplifier.
The spectrum analyzer produces an output in dBm (P50 ) after integration over the specified
noise bandwidth. This is equivalent to the power dissipated in a 50 Ω resistor. The outputreferred noise voltage vrms
is found by applying Ohm’s law. To calculate the input-referred
n
noise current, the total transimpedance gain of the receiver (Zrec ) is needed in 3.52. This is the
transimpedance gain from the TIA multiplied by the voltage gain of the post amplifier into 50
Ω load impedance.
vn2 = 10
P50 −30dBm
10
q
vnrms = vn2
vnrms
irms
=
n
Zrec
(3.50)
(3.51)
(3.52)
Theoretically, the noise bandwidth is from DC to infinite. This is however not possible in
44
Chapter 3. Opto-electronic receiver
real life. First of all, the bandwidth of the spectrum analyzer is limited. In this case, a 3GHz
type from Agilent was used. Secondly, the noise of the receiver rolls off at high frequencies and
eventually drops below the noise floor. It is therefore important that the integration bandwidth
only extends to the intersection of receveir noise and analyzer noise. Otherwise, the result is
too pessimistic.
3.6
Stability simulation
In the small signal analysis of the TIA, the expression for the loop gain LG was set up to
determine stability of the circuit. Because the expression is based on an approximation of the
linearized real circuit, a more accurate alternative must be found. SPICE simulation provides
a fast way of predicting stability of an arbitrary circuit more precisely without the necessity
of hand calculations. The loop gain can be determined in AC-simulation by putting the input
source to zero, breaking the loop and measuring the open loop gain by injection of a test signal.
Figure 3.9 visualizes this technique for a block diagram. Most systems apply negative feedback
and therefore an inversion is necessary in the loop. For convention, the LG is considered
positive in such a system, i.e. LG=AB, while the actual loop is -AB. With this annotation, the
phase of LG starts from 0◦ and becomes negative as frequency rises. When the phase becomes
-180◦ , positive feedback exists and the magnitude of LG must be smaller than one to prevent
oscillation and instability.
in
+
-
A
B
out
LG=AB
Figure 3.9: Determining loop gain on a block diagram
Breaking the loop however disturbs the DC-operating point and linearization of the circuit
isn’t valid anymore. Two methods can be used to preserve the DC-biasing. By using large
inductors and capacitors, the loop is continuous for DC but interrupted for AC [23]. A more
elegant solution is given in [24] where the loop is in both cases continuous by injecting a signal
source. Since current can still flow through the source, the loop isn’t broken. The complete
loop gain is calculated by the current loop gain and the voltage loop gain. Therefore, two
schematics must be constructed where respectively a current and a voltage is injected, see
Figure 3.10. The simulated LG (3.56) can be seen as a parallel combination of the voltage loop
gain Gv and the current loop gain Gi . When one of them is much smaller than the other, the
LG can be approximated by the smallest one. In the case of a TIA, the output impedance is
a lot smaller than the input impedance (3.1,3.2) which makes Gi very high. The LG wil thus
be dominated by Gv . Remark that this method of determining the loop gain doesn’t take into
account the feedforward effect via Rf since the current flow is assumed unidirectional. The
General Feedback Theorem of Dr. R. D. Middlebrook can determine LG exactly, but this falls
beyond the scope of this thesis.
45
Chapter 3. Opto-electronic receiver
A
A
Rf
-
is
vi
Vii
0V
1A
AC
Vif
if
0V
Vim
0V
-
Vi
ii
vs
+
if
ii
+
Rf
1V
AC
vf
Vf
Vfm
0V
Figure 3.10: Injection of a voltage and a current to calculate loop gain and the corresponding macro
model
vf m
vim
if
Gi =
ii
LG + 1 = (Gv + 1) // (Gi + 1)
Gi · G v − 1
LG =
Gi + Gv + 2
Gv =
(3.53)
(3.54)
(3.55)
(3.56)
A macro model is created in ADS for the voltage and current injection such that it can
be easily inserted in all circuits (Figure 3.10). The two batteries in the current injection are
used to measure the currents ii and if . They are set at 0 V to not influence the circuit. These
batteries are also used in the voltage injection model. They isolate the node voltages vf m and
vim from the external circuit. This way, they can be directly inserted in the ADS equations.
The battery voltage is also 0V for the same reason as before. Figure 3.11 shows an example
of a LG simulation. The result proves demonstrates that Gi can be neglected since it is much
larger than Gv . The phase of LG is also plotted where a PM of 80◦ can be observed.
Figure 3.11: LG simulation of a CE TIA
46
Chapter 3. Opto-electronic receiver
3.7
Common source/emitter TIA
One of the most common used and simple topologies to implement a TIA is based on a common
source/emitter voltage amplifier [15], [20]. It is followed by a buffer to provide a low output
impedance and enable automatic DC-biasing. The feedback Rf is connected between the output
of the buffer and the input of the amplifier. The amplifier itself can be built from a bipolar
transistor or a FET. The bipolar transistors are from Infineon and use the SiGe technology.
They are characterized by a high fT and a low NF. The FET is actually a HEMT from Avago
Technologies. The two technologies perform differently regarding transimpedance gain and
noise. Simulations will reveal which one suits best in a TIA circuit.
3.7.1
Bipolar version
The circuit of the CE TIA is shown in Figure 3.12. The first step in the design proces is finding
the correct DC-biasing. Only then can the circuit be linearized and is small signal analysis
valid. Remark that this circuit biases itself due to the feedback and the base-emitter voltages.
Equation 3.57 gives the expression for the collector current through Q1 . The design of a BJT
TIA is not so straightforward because the DC-biasing depends upon the feedback Rf . Because
Rf also determines the poles, adjusting DC-bias values and small signal parameters has to be
performed simultaneously and in an iterative way until an optimum is found.
I1 =
β Vcc − Vbe1 − Vbe2
Rf
1 + Rc ·β
(3.57)
Rf
Vcc
Rc
Q2
iPD
vo
Q1
I2
Rf
Figure 3.12: Common emitter TIA with bipolar transistors
The transistor Q1 is chosen to be type BFP640F which has a NF of 0.65 dB and a max fT
of 40 GHz. The buffer has less effect on irms
and therefore its requirements aren’t as heavy.
n
The BFP420F is used with a NF of 1.1 dB and a max fT of 25 GHz. Now the values of the
elements in Figure 3.3 have to be found in order to calculate all the parameters of the TIA.
The capacitance Ci will mostly be dominated by the Miller effect if the gain is high. The Miller
effect referred to the output also causes an increase in capacitance, but this is rather limited.
A design ambiguity arises when looking at the equations derived so far. Cπ depends via 3.47
on fT and on the current. It must be clear now that the DC-bias has a large influence on the
47
Chapter 3. Opto-electronic receiver
dominant pole since it affects both Rf and Cπ . A spreadsheet is therefore useful for finding a
satisfying solution in a quick way.
A = −gm1 · Rc
β
Ri = rπ =
gm1
Ci = Cd + Cπ1 + Cbc1 · (1 + gm1 · Rc )
1
Co = Cbc1 · 1 +
+ Cbc2
gm1 · Rc
(3.58)
(3.59)
(3.60)
(3.61)
The influence of Cπ2 is not included in Co because it is bootstrapped with a current source
gm2 ·RE
in the emitter of the buffer. The gain of the buffer is 1+g
. The use of a current source
m2 ·RE
makes RE very large such that the gain approaches unity. The buffer will be biased for all
TIA topologies at 10 mA such that Q2 operates at maximum fT . The transistor array for
the current mirror is the same as with the driver, i.e. BC847BS from NXP. The output
resistance of the mirror was simulated in ADS. For a current of 10 mA and Vce =500 mV,
this is approximately 6 kΩ. Applying emitter degeneration increases this to approx. 100 kΩ
when using 43Ω as degeneration. The input impedance of the buffer with this bias is given
by
rπ +Rsource
β · RE and corresponds to 18MΩ. The output impedance is specified as RE //
and
β+1
amounts 4Ω. Based on these results, the output buffer will surely not be the bottleneck in the
CE TIA.
Table 3.3: Simulated parameters of the CE TIA
Ztia,0
Rf
BWtia
∆GD
irms
n
in,tia
Psens
Plin
max
DRopt
A
LG0
f0dB
PM
Pdiss
61.3 dBΩ
1150Ω
926 MHz
142 ps
519 nA
√
17 pA/ Hz
-19.6 dBm
-1.3 dBm
18.3 dB
42 dB
30.1 dB
562 MHz
81◦
151 mW
Simulation results of the transimpedance and the loop gain are shown in Figure 3.13 and
Table 3.3. In the left plot, there is a peak at 6GHz noticeable with amplitude equal to the
midband gain. In reality this will typically be an oscillation caused by the parasitics of the
transistor packages. It is important that this is suppressed to make eye diagram measurement
possible. Another reason to suppress it, is for optimizing noise performance. The integration
of the output noise voltage density carries out to 10 GHz to approximately infinity. Due to the
Chapter 3. Opto-electronic receiver
48
presence of this peak, the integrated noise is larger than the ideal case where Ztia rolls of like
a first order response.
A clever way to reduce or even eliminate oscillation peaks is placing a capacitor between
base and emitter of the output buffer. Since the equivalent model of a capacitor is a resonating
RLC-circuit, high frequency voltages are shorted directly to the output. This bypasses the
transistor such that the oscillation can die out. A capacitance of 2.7 pF is appropriate for
resonance above 4 GHz. This adjustment has no influence on the location of the non-dominant
pole because it is bootstrapped by the current source. Comparing the right with the left plot,
a suppression of more than 20 dB is obtained. There is still some overshoot present at 2 GHz,
but this is not harmful as it is not a real oscillation. It’s also impossible to compensate this
without distorting the midband response. While not shown in the figure, the noise was reduced
with a factor two. Since all circuits will show one or more peaks in the frequency response,
this technique will be used for every TIA.
The noise simulation displays the seperate contributions to the output noise voltage. The
effect of the emitter follower is negligible. The input transistor produces more noise than the
feedback resistance although it has a low NF. Replacing it with a HEMT could produce better
results.
Figure 3.13: Simulation of transimpedance, loop gain (without and with extra Cbe )and output-referred
noise voltage for the CE TIA
The first test of this prototype posessed an oscillation of 200 MHz which dominated the
signals. The oscillation was caused by crosstalk via the power supply line from the amplifier
back to the photodiode. This effect could be eliminated by placing a ferrite bead in the supply
line of the photodiode which forms a high impedance for the crosstalk. This technique was
from then on used for every TIA circuit.
49
Chapter 3. Opto-electronic receiver
3.7.2
HEMT version
Vcc
Rc
Q2
iPD
vo
M1
I2
Rf
Figure 3.14: Common source TIA with a HEMT
The design of the CS TIA with a HEMT is a lot easier since the DC-biasing is independent
of Rf . The voltage Vgs increases with increasing current and is also lower than Vbe . A larger
current consumption than the bipolar implementation will be unavoidable. The HEMT from
Avago is the type ATF54143 with a NF of 0.5 dB. It works in enhancement mode such that a
positive Vgs must be applied for operation.
I1 =
Vcc − Vgs − Vbe2
Rc
(3.62)
The input impedance of a HEMT is infinite. All photodiode current flows directly through
the feedback to the output. Remark that the loop gain now equals the voltage gain because
of the infinite Ri . The capacitance at both nodes are similar as with the bipolar version. The
major difference is a limited transconductance gm which only increases with the root of the
current. Due to a smaller gm and a smaller Rc that is fixed by bias considerations, the loop
gain is 12 dB which is smaller than with the CE TIA. A much smaller Ztia,0 is the unfortunate
consequence.
A = −gm1 · Rc
(3.63)
Ri = ∞
(3.64)
Ci = Cd + Cgs + Cgd1 · (1 + gm1 · Rc )
1
Co = Cgd1 · 1 +
+ Cbc2
gm1 · Rc
(3.65)
(3.66)
Figure 3.15 visualizes the simulation results. Oscillation peaks are even more pronounced
but can again be minimized thanks to the extra inserted capacitor. If the noise contributions
are compared with Figure 3.13, it is clear that the HEMT is a lot less noisier than a BJT. It
only adds noise at higher frequencies. It is therefore not a surprise that sensitivity is better
despite a lower feedback resistor. A circuit should be found that incorporates a HEMT and a
high transimpedance to reveal unseen performance.
50
Chapter 3. Opto-electronic receiver
Table 3.4: Simulated parameters of the CS TIA
Ztia,0
Rf
BWtia
∆GD
irms
n
in,tia
Psens
Plin
max
DRopt
A
LG0
f0dB
PM
Pdiss
3.8
Cascode TIA
3.8.1
Bipolar version
54.4 dBΩ
540Ω
926 MHz
145 ps
398 nA
√
13.1 pA/ Hz
-20.8 dBm
0.2 dBm
21 dB
29.8 dB
29.8 dB
584 MHz
78◦
250 mW
The voltage amplifier used as input stage presented in Figure 3.16 is called a cascode amplifier.
It consists of a common emitter transistor and a current follower. This configuration reduces
the Miller effect significantly. One can prove this by calculating the full small signal equivalent
[14], but the same result is obtained in a more intuitive way. To recapitulate, the Miller effect
occurs between two nodes where one node is the amplified version of the other. To reduce
the Miller effect, one simply has to reduce the gain between those two nodes. In a CE stage,
the gain is determined by gm and the impedance seen at the collector, which is equal to Rc .
By replacing this resistor with a common base transistor Q2 called cascode transistor, the
impedance seen by Q1 at its collector is 1/gm2 . Since this counts only a few ohms, the gain is
approximately one. The cascode Q2 acts as a amplifier with gain gm2 · Rc . The equation for
the total gain is given in 3.67 and is equal to the gain of the CE stage.
gm1
gm2 · Rc
gm2
β
Ri = rπ =
gm1
gm1
Ci = Cd + Cπ1 + Cbc1 · 1 +
gm2
Co = Cbc2 + Cbc2
A=−
(3.67)
(3.68)
(3.69)
(3.70)
The bias collector current is equivalent to the CE TIA (3.57). The collector emitter voltages
Vce1 and Vce2 can be freely chosen, but must be high enough to bias the transistor at a high
fT . The sum is fixed by the voltage drop across Rc . Vce1 is set by applying a DC-voltage to
Chapter 3. Opto-electronic receiver
51
Figure 3.15: Simulation of transimpedance, loop gain (without and with extra Cbe ) and outputreferred noise voltage for the CS TIA
the base of Q2 which automatically also defines Vce2 . For Q2 to work as a current follower,
the base must be at ground for small signals. This can be accomplished by using a voltage
source with very low output impedance. A resistive divider alone won’t do the job. This has
to be decoupled over a broad range with capacitors. The disadvantage of this technique is that
a capacitor behaves inductively for frequencies beyond its resonance point. This degrades the
performance of the common base since the impedance becomes very large for high frequencies.
A more elegant solution is implementing a LED as voltage source where the current is set
by R1 . When the LED is sufficiently forward biased, the dynamic resistance corresponds to
approx. 10 ohms. Using a red LED, the forward voltage measures 1.6 V which fixes both
transistors at a Vce of 0.8 V.
The capacitance Cbc is only increased by a factor of 2. To illustrate the effectiveness of
this technique, the CE version showed an increase of more than one hundred! Looking at the
simulation results in Table 3.5 and Figure 3.17, the transimpedance is now increased with 18
dB. The top of the line transistor of Infineon (BFP740F) was chosen as Q1 to maximize noise
performance. For Q2 and Q3 , the BFP640F seemed to give the best results regarding group
delay.
With a high transimpedance gain, comes a smaller DR. To extend the range, the degeneration of the current source was reduced. Taking a deeper look into the noise behaviour, the
contribution from Rf is negligible due to its high value . The input transistor determines the
sensitivity which is improved with almost 4 dB. It can be concluded that this circuit drives
the avalaible SiGe discrete technology at its limits. For better sensitivity, one has to opt for a
BiCMOS implementation.
52
Chapter 3. Opto-electronic receiver
Vcc
R1
Rc
D1
Q2
Vb2
iPD
Q3
vo
Q1
I3
Rf
Figure 3.16: TIA with bipolar cascode input stage
Table 3.5: Simulated parameters of the bipolar cascode TIA
Ztia,0
Rf
BWtia
∆GD
irms
n
in,tia
Psens
Plin
max
DRopt
A
LG0
f0dB
PM
Pdiss
3.8.2
79.5 dBΩ
11200Ω
920 MHz
107 ps
160 nA
√
5.3 pA/ Hz
-24.7 dBm
-8.4 dBm
16.4 dB
42.5 dB
14.8 dB
380 MHz
75◦
180 mW
HEMT version
A HEMT is used as input transistor for achieving a lower sensitivity than the bipolar cascode.
The biasing of the drain current is again very similar as with the CS TIA (3.62). One notices
from Figure 3.18 that the cascode transistor is a BJT . Because a bipolar has a higher transconductance than a HEMT, the Miller capacitance is less than two times Cgd . Another difference
with the previous circuit is the use of a decoupled resistive divider to fix Vce1 and Vds1 . Since
more current flows through Rc , the voltage across the two transistors becomes lower. Using
a LED as voltage source would force Q1 to work near saturation which is unwanted, hence a
decoupling strategy should be used. Figure 3.19 and Table 3.6 shows the simulation results.
53
Chapter 3. Opto-electronic receiver
Figure 3.17: Simulation of transimpedance, loop gain and output-referred noise voltage for the bipolar
cascode TIA
Vcc
R1
Rc
R2
Q2
Vb2
Q3
vo
C
iPD
M1
I3
Rf
Figure 3.18: TIA with cascode input stage using a HEMT
3.9
Comparison of receivers
For a clear overview, the significant parameters for the different circuits are summarized in
Table 3.7. The cascode versions deliver the best performance with the HEMT as leader. The
biggest disadvantage of the HEMT is 73 % more power dissipation than the BJT version. The
improvement in sensitivity of 0.5 dB is overshadowed by the large dissipation. For this reason,
no prototype was built of the cascode HEMT.
The CE, CS and cascode BJT TIA were tested at board level. To minimize the influence
of the driver on the characterization of the receiver, a commercial driver was chosen from
Firecomms. The speed of the EDL1000T is rated at 1.25 GBd for a PRBS of 27 -1. It is
connected with the receiver by a POF cable of 10 cm. A first measurement is done at 400 Mbd
to determine the sensitivity with a histogram as explained in 3.49. Ztia,0 is necessary for this
formula and can be calculated from Rf . It has to be remarked that this method isn’t really
accurate and sensitivity is better measured with a spectrum analyzer. Then, the bandwidth is
approximated by looking at what baudrate the gain of the most occurring transition is reduced
with 3 dB. At this point, the rising edge of the eye doesn’t reach the top level anymore. The
eye height is given by EH to annotate the signal strength. All the measured parameters are
listed in Table 3.8.
54
Chapter 3. Opto-electronic receiver
Table 3.6: Simulated parameters of the cascode TIA with HEMT
Ztia,0
Rf
BWtia
∆GD
irms
n
in,tia
Psens
Plin
max
DRopt
A
LG0
f0dB
PM
Pdiss
69.7 dBΩ
3150Ω
912 MHz
91 ps
144 nA
√
4.8 pA/ Hz
-25.2 dBm
-7.2 dBm
18 dB
30.6 dB
30.6 dB
331 MHz
72◦
313 mW
Figure 3.19: Simulation of transimpedance, loop gain and output-referred noise voltage for the cascode
TIA with a HEMT
It can be concluded that there exists a large difference between simulation and reality and
this in a negative way. The CE circuit satisfies the minimum design rule of BW=0.5·Rbd and
also achieves the best sensitivity of -17 dBm. The CS TIA is second best, but is not ready to
implement in a real application because an osillation at 2.3 GHz was present that is suppressed
by the 1 GHz oscilloscope. This problem could not be solved. The cascode circuit seems to
have the worst performance, but it was measured with a 4 GHz scope in comparison to the
CE TIA. This reveals all the imperfections of the receiver which influences the parameters in a
negative way. The eye height is by far the largest of the three. The sensitivity measurements
with the histogram prove that they are not really correct. In theory the cascode version has
the lowest noise current, but according to the results it’s the contrary. The cascode version
will be implemented in the receiver for the final measurement. The bandwidth seems at first
too low for the desired bitrate, but this will be compensated by the post amplifier. Figure 3.20
shows the eye diagrams for every receiver.
A practical remark is added concerning the base of the cascode transistor. This should be
kept low impedant to effectively work as a cascode circuit. As was previously mentioned, this
could be done with either a LED or a capacitively decoupled resistive network. Both were tried
at the prototype, but only the LED solution seemed to actually work. The capacitive version
55
Chapter 3. Opto-electronic receiver
Table 3.7: Summary of simulated TIA circuits
Parameters
Ztia,0
∆GD
in,tia
Psens
Pdiss
CE
61.3 dBΩ
142 ps
√
17 pA/ Hz
-19.6 dBm
151 mW
CS
54.4 dBΩ
145 ps
√
13.1 pA/ Hz
-20.8 dBm
250 mW
cascode BJT
79.5 dBΩ
107 ps
√
5.3 pA/ Hz
-24.7 dBm
180 mW
cascode HEMT
69.7 dBΩ
91 ps
√
4.8 pA/ Hz
-25.2 dBm
313 mW
Table 3.8: Measured parameters of the different receivers
Parameters
Ztia,0
BW
EH
Jpp
OS
Psens
in,tia
Pdiss
CE
63.1 dBΩ
750 MHz
36.6 mV
172 ps
4%
-17.5 dBm
√
30.6 pA/ Hz
165 mW
CS
53.9 dBΩ
550 MHz
9.1 mV
176 ps
5.8 %
-16.7 dBm
√
43 pA/ Hz
325 mW
cascode BJT
77.1 dBΩ
450 MHz
97 mV
245 ps
0%
-16 dBm
√
57 pA/ Hz
180 mW
always gave an oscillation at a frequency of several GHz, no mather what values were used.
The reason for this lies in the fact that a real capacitor acts as an RLC-circuit. The inductive
part of the capacitor above its resonance oscillates with the input capacitance of the cascode
transistor. This creates an amplified high frequency signal at the output.
3.10
Post amplifier
3.10.1
Considerations for 4-PAM
The output of the TIA in worst case conditions must be higher than the sensitivity of the
following block in the receiver chain. The required voltage is several 100 mV peak to peak
according to [2] for a CDR. For high-speed receivers, the output swing of the TIA is typically
not high enough. An amplifier in cascade with the TIA solves this problem. It is called the
post amplifier (PA) and can be divided in two main classes: limiting amplifier and AGC. The
differential topology is the most popular in integrated circuit design. A limiting amplifier
operates in the linear region for small signals and starts clipping for large inputs. In the nonlinear case, the amp operates as a current steering circuit similar to the driver. The main
advantage of this circuit is its simplicity and is frequently used with NRZ.
When linearity is very important, AGC is adopted. The gain of the amplifier is adjusted
according to the average input optical power. This average input power can be measured with
a monitor photo diode that steers the AGC block [25]. This is very important when multilevel
modulation is applied, as is the case in this context. Because multiple decision levels exist,
56
Chapter 3. Opto-electronic receiver
1500 Mbps CE
1100 Mbps CS
900 Mbps BJT cascode
Figure 3.20: Measured eye diagrams of the three TIA’s with PRBS of 7
the receiver must guarantee that under all circumstances the output signal is held constant
with respect to these levels. For AGC, two implementations are possible. In [6] and [25], a
TIA with adaptive transimpedance was built. The control voltage of the AGC sets the gatesource voltage of a FET in triode operation. This FET is placed in parallel with the feedback
resistance. This topology preserves the SNR under differing optical input power, but stability
and bandwidth becomes unpredictable unless well monitored. Another variation is a fixed TIA
followed by a variable gain amplifier [2]. The pro and contra are the inverse of the adaptive
TIA.
Designing a receiver with AGC at board level is too complex. Therefore, the author will
focus on the design of a fixed linear post amplifier that guarantees a minimum output swing.
3.10.2
Specifications
In chapter one, a sensitivity of -17.5 dBm was specified for the suggested new MOST standard.
Using the transimpedance gain of the cascode BJT TIA in 3.8 and a responsivity of 0.43 A/W,
one finds a minimum swing of 37 mV for each level. The sensitivity of the Agilent analyzer for
performing a BERT scan is 50 mV. A voltage gain of two would suffice for decent operation.
The bandwidth of the amplifier is chosen such that is doesn’t degrade the receiver bandwidth. A good value is 1.0 to 1.2 Rbd according to [2], which corresponds to 1.5 GHz for the
desired speed. The simulated circuit will be designed with some margin on the bandwidth
because in reality, this is lower than simulated.
The amplifier is connected to the TIA and the subsequent block with a transmission line.
Input and output matching must be better than -10 dB reflection coefficient up to Fknee for
providing more than 90 % power transfer. According to Figure 3.20, τr,10−90 amounts 400 ps.
This corresponds to an Fknee of 1.25 GHz.
Since the output signal of the TIA is still strong at minimal input power, the sensitivity of
the amplifier is less important than its 1 dB compression point. Under all circumstances, the
level spacing of the 4-PAM signal must be preserved. Experimental results of the combo driver
and BJT cascode show a maximum input voltage of 140 mV peak-to-peak. This upperbound
on the dynamic range will limit the gain of the PA, but is then again advantageous for the
bandwidth.
The cascaded PA will degrade the input-referred noise current of the receiver. Therefore,
57
Chapter 3. Opto-electronic receiver
the transistors must have a low NF to minimize the influence. But since the gain of the TIA
is very large, the noise performance of the PA is relaxed when reasoning on NF with cascaded
amplifiers. The BFP420F from Infineon has a NF of 1.1 dB and is a good compromise between
cost and performance.
3.10.3
Emitter degeneration
The desired gain of the PA is quite low which makes internal feedback necessary. This also
improves linearity and makes the design independent of the transistor parameters. A common
emitter amplifier with emitter degeneration is most appropriate for this job. The complete
circuit is given in Figure 3.21. The collector current is sensed by Re and an error voltage
is injected at the input. Series sensing regulates the output current such that the output
impedance is increased. Series injection increases the input impedance [14]. The voltage gain
is only depending on the ratio of two resistors when applying nullator hypothesis. This makes
the influence of temperature during operation in automotive environments marginal. This
however is only true when the loop gain LG is sufficiently large. The characteristics of a single
amplifier are described by the following equations which can be derived by its small signal
equivalent. An additional advantage of this circuit is the bootstrapping of the base-emitter
capacitance Cπ [14]. Its value is reduced with the loop gain, another reason to make LG large.
The input capacitance is dominated by the Miller effect of Cbc . When multiple stages are
cascaded, the gain of a single stage is quite low which bounds the Miller capacitance. Emitter
degeneration is therefore useful in a multistage approach.
Av = −
gm · Re Rc
Rc
≈−
1 + gm · Re Re
Re
LG = gm · Re
(3.71)
(3.72)
Rin ≈ rπ + β · Re
(3.73)
Ro = ro · (1 + gm · (Re //rπ ))
Cπ
+ Cbc · (1 − Av )
Ci =
1 + gm · Re
1
Co = Cbc · 1 −
Av
(3.74)
(3.75)
(3.76)
The bandwidth of the post amplifier is fixed by the dominant pole. This can be located
at node A or B in Figure 3.21. CA is equal to Ci1 of the first stage. This input pole depends
on Ro,tia , Zi1 and R1 //R2 . The capacitance at B is determined by Co1 and Ci2 . The node
impedance relies on Rc1 and the input impedance of the second stage. Since the impedance of
the TIA is very low due to ist shunt feedback topology, the dominant pole is located at B. The
ratio of output versus input impedance of the cascaded stages are of importance for the total
voltage gain Avtot (3.80). In this equation, Rin of Q1 and Q2 was assumed very large and the
TIA was represented as an ideal voltage source.
58
Chapter 3. Opto-electronic receiver
Vcc
Vcc
Rc1
R1
Ro,tia
Vtia
TL
R3
Rc2
TL
C2
C1
A
Q1
Q2
B
+
Vo
Ri,next
-
R2
R4
Re1
Re2
Figure 3.21: Post amplifier with interconnection to the outside world
CB = Ci2 + Co1
Avtot
RB = Rc1 //Ri2 //R3 //R4
1
BWP A =
2π · CB · RB
Ri,next
R3 //R4
= Av1 ·
· Av2 ·
R3 //R4 + Rc1
Ri,next + Rc2
(3.77)
(3.78)
(3.79)
(3.80)
The two stages are AC-coupled for dissipation considerations. A biasing network is needed
to fix the operating point of the transistors. A voltage divider enables a β independent bias.
The first bias circuit formed by R1 and R2 also serves as a matching network. Traditional
matching sections constructed from high pass and low pass LC-elements are hard to implement
for broadband signals. The parallel combination of R1 and R2 is a quick and dirty method to
match the impedance to the transmission line TL. Due to the presence of CA , it is however
limited in frequency since the reactance keeps on rising and eventually dominates the resistive
part. The main disadvantage is a large current consumption. This can be somewhat reduced
by dimensioning the TL at 80 Ω. For a 0.8 mm FR4 printed circuit board, this corresponds to
a width of 0.63 mm. One could opt for a higher characteristic impedance but this is associated
with smaller width of the trace. Because the pcb’s are milled, very thin traces aren’t very rigid
for debugging purposes. The interconnection between the two stages measures 4 mm and is
short enough such that it doesn’t behave as a TL.
The input impedance of the next block in the receiver chain is represented by Rin,next in the
circuit. In this work, this is 50 Ω from the oscilloscope. The last stage of a post amplifier could
be implemented as an emitter follower to maximize Avtot . Because the receiver is connected to
the oscilloscope with a 50 Ω coaxial SMA cable, no reflections occur at the the load side. In
realistic situations, the input of a CDR is hardly pure resistive and a matched source impedance
is necessary. Therefore, the last stage is implemented as a pseudo 50 Ω buffer. Why pseudo
you say? Because the source impedance, which is equal to Rc2 is chosen at 75 Ω and thus
additional gain is added. The mismatch causes an agreable reflection coefficient of -14 dB.
Figure 3.22 displays the simulated AC-response and S-parameters. The matching at both
sides is below -10 dB up to 2 GHz which is higher than Fknee . Some overshoot is noticeable
in the AC-response. A couple of simulation trials unveiled that this is caused by impedance
59
Chapter 3. Opto-electronic receiver
mismatch and package parasitics. The linearity of the amplifier was tested with a four level
PRBS of 231 -1 at 1.25 Gbd. The eyediagram in Figure 3.23 reveals four equally spaced levels
with overshoot and this at maximum TIA output power. Table 3.9 summarizes the results.
Figure 3.22: AC-response and S-parameters from the simulated PA
Figure 3.23: 4-PAM eyediagram at 1.25 Gbd and 140 mV peak-to-peak input
Table 3.9: Simulated characteristics of the post amplifier
Av1
Avtot
BW
7.95 dB
8.95 dB
3.55 GHz
A prototype was made with the cascade of the TIA and the post amplifier implemented on
one pcb, see Figure 3.24. Despite the fact that the layout of the TIA was very similar to the
seperate version, the circuit was unstable. Several adjustments were made to solve it, but with
no succes. Therefore, the TIA circuit was cut out of the board to use the PA standalone. The
layout of an amplifier with emitter degeneration is very critical. The connection between the
emitter, Re and ground must be as short as possible. Otherwise, excessive inductance degrades
the gain and causes overshoot in the frequency domain. The short connection was realized by
using the two emitter leads of the TSFP4 transistor package and 0402 SMD resistors. Figure
3.25 shows the eye diagram of the PA at PRBS of 231 − 1 at 1250 Mbps. There is some ringing
noticeable at the output, but this was already present at the input. Therefore it is difficult to
analyze the overshoot behaviour of the circuit. Table 3.10 lists the measured parameters of the
post amplifier.
60
Chapter 3. Opto-electronic receiver
Post Amplifier
TIA
Figure 3.24: Pcb of the cascode TIA cascaded with the PA, top=blue, bottom=pink
Figure 3.25: Eye diagram of the post amplifier output (above, 500 mV/div) and of the input (below,
200 mV/div) at 1250 Mbps and PRBS of 231 − 1,
3.11
Cascade of TIA and post amplifier
The bipolar cascode TIA is cascaded with the post amplifier and measured with the Firecomms
transmitter for direct comparison with Table 3.8 and Figure 3.20. Remember that the bandwidth of the TIA was rather low with 450 MHz. The post amplifier however shows some
peaking in the frequency domain, Figure 3.22. This will also be noticeable in the time domain
by overshoot which degrades the eye in multi-level modulation. By combining the slow TIA
with the fast PA, the bandwidth is extended and the rise time is significantly faster while limiting the amount of overshoot. Figure 3.26 demonstrates this technique very clear. A cascade
with a broadband TIA like the CE version (750 MHz) is a bad combo because of the large OS.
The characteristics of the cascade can be inspected in Table 3.11. Pay special attention to the
extended bandwidth of 700 MHz and lower jitter results.
Because of the high gain of the cascade, a measurement of irms
with a spectrum analyzer
n
becomes possible. The noise bandwidth for integration is chosen at 1.6 GHz and starts from
3 MHz. According to [2], integration over two times the receiver bandwidth for practical
measurements is sufficient. The noise of the receiver is dominated by the analyzer’s noise floor
for frequencies higher than 1.6 GHz which makes a higher noise bandwidth obsolete. The noise
floor was minimized by setting RBW at 1 kHz and VBW at 300 Hz. The reference level was
61
Chapter 3. Opto-electronic receiver
Table 3.10: Measured characteristics of the post amplifier
Avtot
Vi,1dB
Jpp
Pdiss
CE +PA
9.96 dB
366 mV
90 ps
310 mW
BJT cascode + PA
Figure 3.26: Eye diagram of two TIA’s cascaded with the PA at 1250 Mbps and PRBS of 231 − 1
chosen at -55 dBm for clear visualization with 0 dB attenuation. Finally, the input-referred
noise current
measures 200 nA and the averaged input referred noise current density calculates
√
7.6 pA/ Hz. This deviates little from the simulated values in Table 3.5.
Figure 3.27: Noise current measurement with the spectrum analyzer
Its interesting to see how well the designed receiver performs in comparison to integrated
circuits in CMOS or BiCMOS technology. Table 3.12 lists four references at data rates of the
same order. The achieved transimpedance is superior to the other implementations with more
than 20 dB. This is however related to a fivefold of current consumption and a low DR. The
noise behaviour is evaluated with in,tia because it is independent of the receiver bandwidth.
The receiver of this work comes close to the noise performance of the different designs and even
obtains better results than [20]. If necessary, the dynamic range can be extended by lowering
the gain of the post amplifier. This is done by decreasing the ratio Rc /Re or reducing the
collector current. There is also still room available to improve the power dissipation. Despite
the fact that the post amplifier of the receiver is not yet fully optimized, the complete circuit
pushes the high quality transistors to their limits.
62
Chapter 3. Opto-electronic receiver
Table 3.11: Measured parameters of final receiver: bjt cascode TIA+PA
Zrec,0
BW
EH
Jpp
OS
irms
n
in,tia
Psens
Plin
max
DRopt
Pdiss
87.1 dBΩ
700 MHz
362 mV
135 ps
21 %
200 nA
√
7.6pA/ Hz
-23.8 dBm
-12.3 dBm
11.5 dB
510 mW
Table 3.12: Comparison of different receivers presented in literature with the one designed in this work
Parameters
Zrec
BW
in,tia
Pdiss
[19]
60 dBΩ
500 MHz
√
7 pA/ Hz
100 mW
[6]
60 dBΩ
622 MHz
√
6.8 pA/ Hz
100 mW
[20]
62 dBΩ
1700 MHz
√
9.8 pA/ Hz
137 mW
[26]
58 dBΩ
950 MHz
√
6.3 pA/ Hz
85 mW
this work
87.1 dBΩ
700 MHz
√
7.6 pA/ Hz
510 mW
Chapter 4
Evaluation of the complete system
In this final chapter, the performance of the designed optical communication system will be
evaluated under different conditions. Both PCS and POF will be tested to investigate which
fiber seems most appropriate for a high speed MOST-compatible interconnection. It will also
be investigated which modulation format delivers the best performance and under what conditions. The NRZ signal will be generated with the maximum modulation current: 3IM . By
using different lengths of fiber, the theoretical bandwidth-length product can be checked and
if necessary corrected.
4.1
Optimization for 4-PAM
The modulation currents of the driver were chosen to obtain the best SNR at the receiver,
Table 2.1. A quick measurement to validate the functionality of the 4-PAM communication
system unveiled that the top interval was smaller relative to the other ones. This non-lineair
behaviour was caused by the VCSEL since it was verfied with two different TIA’s. Apparently,
the laser diode saturates for currents larger than 8 mA, including the bias current. This was
not mentioned in the datasheet.
To preserve linearity, the modulation currents IM and 2IM were lowered to 1.25 mA and
2.5 mA. The bias current was reduced to 2.5 mA. This corresponds to an average optical power
of -1.5 dBm which obeys the eye safety requirements. The circuit consumes 62.5 mW from the
supply. The improvement in dissipation with 39% comes with lower extinction ratios of the
different levels. The transmitted signal is now less robust against fiber attenuation.
4.2
POF
The setup consists of the 2.7 Gbps Agilent generator E4861 and the 4 GHz TDS7404 oscilloscope
from Tektronix. The developed 4-PAM driver and the cascade of the BJT cascode TIA and post
amplifier compose the optical communication system. The fiber is coupled to the transmitter
and receiver by PVC and aluminum connectors. The drill diameter of the connector is optimized
for the fiber size.
63
64
Chapter 4. Evaluation of the complete system
Figure 4.1 shows the measured eye diagrams of different fiber lengths at 900 MBd. Table 4.1 lists the results obtained with histogram measurement. The BER is calculated using
pp
equation 3.39 where vpp
s /3 is equal to veye . It can be observed that the strength of the signal
is heavily attenuated with increasing length. Figure 1.6 shows a spectral attenuation of 1.5
dB/m for 850 nm wavelength. The real attenuation is larger and amounts approximately 7
dB/m when averaging out the measured results. This high value could imply that the POF
was misaligned or that the fiber wasn’t very clean. The associated reduction in SNR translates
into a higher BER. A POF cable of 110 cm proves that the complete system works better than
the requirements set up in the first chapter, Table 1.3. A BER lower than 10−3 is achieved
with an input optical power of -21 dBm. This optical input power was calculated based on the
output voltage, total transimpedance gain and < of the photodiode. Because the results are
better than expected, the specifications of the new system can be made more stringent. A test
with PCS still must validate this.
POF 30 cm
POF 110 cm
200 mV/div
250 ps/div
50 mV/div
250 ps/div
POF 250 cm
20 mV/div
250 ps/div
Figure 4.1: 4-PAM eye diagram for different lenghts of POF at 900 MBd and a PRBS of 231 − 1
Table 4.1: Histogram measurement of 4-PAM eye diagrams with POF
length POF
vrms
n
vpp
eye
30 cm
26 mV
210 mV
110 cm
8.1 mV
52 mV
250 cm
4.9 mV
19.2 mV
opt
Pin
BER
-14.9 dBm
2 · 10−5
-21 dBm
5 · 10−4
-25.29 dBm
2 · 10−2
A BERT scan was also carried out to evaluate the performance of the complete POF
system in real life. The analyzer, part of the Agilent generator, has a sensitivity of around
50 mV. Unfortunately, the modulation is restricted to NRZ because the generator/analyzer
combo is not suited for 4-PAM. The modulation current is therefore limited to IM which
corresponds to the lowest level in the multilevel waveform. The POF cable of 110 cm was used
Chapter 4. Evaluation of the complete system
65
as communication medium. The bitrate was increased to 1.2 Gbps to push the system at its
limits because NRZ modulation is associated with a lower BER. Figure 4.2 demonstrates the
histogram measurement on the eye of the bitstream. The BER is now analytically determined
(3.35) and amounts 9.7 · 10−9 . The BERT scan results in a BER of 1.7 · 10−7 after 12 minutes
runtime. This is approximately ten times higher than the theoretical value. This isn’t really a
surprise since the analytical result assumes a detector with infinite sensitivity.
Figure 4.2: NRZ eye diagram for 110 cm POF at 1.20 Gbps at a PRBS of 231 − 1, 200 mV/div, 250
ps /div
4.3
PCS
The test setup for evaluating the system with Step Index PCS fiber is displayed in Figure
4.3. The same equipment was used as with the POF test. Because of the small diameter (500
µm) of the cladding, alignment with the VCSEL and the photodiode is very critical. It’s also
important that the core is made clean from dirt. Since the core diameter (200 µm) is smaller
than the active area of the photodiode, maximum light is coupled in. This was only 16% with
POF because of the large core with respect to the active area. However, POF provides a better
power transfer at the transmitter side. The VCSEL has a microbead lens of 1.27 mm diameter
such that the POF cable easily captures all the light. The PCS fiber must be placed at a precise
height in the connector such that the lens focusses most of the light into the core. Taking both
interconnection losses into consideration, PCS should deliver a stronger signal.
Four lengths of PCS were considered: 1 m, 6 m, 12 m and 32 m. The 1 m fiber causes
no bandwidth limitation and is ideally suited for pushing the driver-receiver to its limits. The
performance of the system is referred to a BER of 10−4 . This is ten times lower than the BER
suggested for the new MOST standard. A lower BER was chosen because theoretical results
are somewhat optimistic compared to reality as was noticed with the BERT scan of the POF
cable. Measurements were done with both 4-PAM and NRZ for better comparison which one
produces less errors at a given data rate.
Figure 4.4 shows the eye diagrams for 1 m PCS fiber at -13 dBm input power. It can
be observed that 4-PAM outperforms NRZ as the bitrate increases. The eye height becomes
smaller for NRZ because the frequency of the fundamental component lies beyond the 3-dB
bandwidth of the receiver. For example, the fundamental frequency of a 2 Gbps bits tream
measures 1 GHz whereas the bandwidth of the receiver is limited to approximately 700 MHz.
This reduction in eye height corresponds to ISI since the bitstream ’01010101..’ (1 GHz) is
66
Chapter 4. Evaluation of the complete system
GENERATOR
PCS FIBER
RECEIVER
TRANSMITTER
Figure 4.3: Test setup for PCS fiber
amplified less than ’0011001100..’ (500 MHz) in case of a 2 Gbps PRBS. This problem doesn’t
occur with 4-PAM because the actual baudrate is only half the bitrate. The fundamental
frequency of a 2 Gbps 4-PAM or 1 GBd information stream corresponds to 500 MHz which lies
below the receivers bandwidth. Figure 4.4 confirms this statement as the height of the levels
(green curves) is independent of the bitrate in the given eye diagrams. However, the eye width
decreases with higher data rates. This closes the three eyes at 2.2 Gbps leading to a BER of
2 · 10−4 . Remark that the green color in the images represents transitions with high probability
of occurance and a blue color corresponds to a lower probability. A maximum bitrate of 2.2
Gbps is possible using 4-PAM with 1 m PCS.
1 Gbps
1.8 Gbps
200 mV/div, 250 ps/div
2 Gbps
200 mV/div, 200 ps/div
2.2 Gbps
200 mV/div, 250 ps/div
4-PAM
200 mV/div, 500 ps/div
BER 2x10-6
BER 4x10-6
200 mV/div, 200 ps/div
BER 8x10-5
200 mV/div, 200 ps/div
BER 2x10-4
200 mV/div, 125 ps/div
NRZ
200 mV/div, 250 ps/div
BER 8x10-19
BER 2x10-5
BER 2x10-2
BER 6x10-2
Figure 4.4: Eye diagram measurement at -13 dBm input power with a PRBS of 231 − 1 for 1 m PCS
Figure 4.6 shows the results for a 6 m PCS optical link. When the 1 Gbps NRZ eyediagram
67
Chapter 4. Evaluation of the complete system
is inspected for both 1m (Figure 4.4) and 6m, the eye height is reduced at 6 m. This is caused
by dispersion of the fiber which translates itself to ISI. As a consequence, the transmission
speed has to be lowered for obtaining a BER of 10−4 in comparison with shorter lengths. The
performance of the NRZ system is now even more decreased at bitrates higher than 1.4 Gbps
because ISI is created by the receiver and the fiber. The maximum bitrate for the specified
BER is now limited to 1.4 Gbps when using 4-PAM.
1.4 Gbps
1 Gbps
200 mV/div, 500 ps/div
1.6 Gbps
200 mV/div, 250 ps/div
4-PAM
200 mV/div, 250 ps/div
BER 2x10-4
BER 2x10-5
200 mV/div, 200 ps/div
BER 8x10-4
200 mV/div, 200 ps/div
NRZ
200 mV/div, 250 ps/div
BER 1x10-10
BER 1x10-2
BER 2x10-1
Figure 4.5: Eye diagram measurement at -13.6 dBm input power with a PRBS of 231 − 1 for 6 m PCS
The previous two measurements showed that higher data rates can be obtained with 4PAM. Now, the dispersion at 12 m fiber will be more prominent which leads to a reduced
bitrate of 700 Mbps. Figure 4.6 shows that the eye quality of the NRZ waveform is better than
of the 4-PAM variant. This is related to a BER that is three orders of magnitude smaller than
with 4-PAM. The reason why 4-PAM is not preferred in this case is because the receiver causes
no bandwidth limitation at this speed. Since the eye of an NRZ signal is about three times
larger than with 4-PAM, less errors occur.
4-PAM
200 mV/div, 500 ps/div
BER 1x10-4
NRZ
200 mV/div, 500 ps/div
BER 1x10-7
Figure 4.6: Eye diagram measurement at -13.5 dBm input power and 700 Mbps with a PRBS of 231 −1
for 12 m PCS
Additional eye diagrams can be found in appendix B. Figure B.1 results from a measurement
at an input power of -19.2 dBm. It reveals that the maximum bitrate for a BER of 10−4 with
4-PAM is limited to 1.8 Gbps. If the NRZ waveform is compared to the 4-PAM waveform
from Figure 4.4 at the same speed, it can be concluded that 6.2 dB extra input power is
needed to achieve the same BER with 4-PAM. This is more than the theoretical value of 4.71
Chapter 4. Evaluation of the complete system
68
dB calculated with 3.38 and 3.42. The author in [6] also came accros this phenomenon. An
explanation is found in the fact that the analytical formula assumes an ideal transmitter. This
is unfortunately not the case in reality. A final test with 32 m can be verified in Figure B.2.
Due to dispersion, the bitrate is only 400 Mbps. Because the PRBS generator is lower bounded
at 350 Mbps, no 4-PAM eye could be constructed.
When the bitrates are compared to the length of the fiber, one can tackle the theoretical
bandwidth-length product stated at 20 MHz·km [3]. The NRZ eye shown at 1 Gbps with 6 m
PCS reveals the beginning of ISI caused by modal disperion of the fiber. Based on this result,
the bandwidth-length product calculates 4.5 MHz·km. This is about four times lower than the
previously mentioned value. The latter was probably obtained under optimal mode-excitation
conditions. A more realistic product of 5 MHz·km is given by [4] and [27] measures 6 to 7
MHz·km. Both results are quite similar to the one obtained in this work.
The different test setups demonstrate that 4-PAM modulation is preferred above NRZ. This
is only valid when the system operates at maximum baudrate at which the receivers bandwidth
was specified. One could argument that an NRZ receiver with a bandwidth twice as large as
the 4-PAM receiver, i.e. 1.4 GHz to achieve 2.2 Gbps, would deliver better results. This is
true as it was proven by equation 3.45. However, such a large bandwidth becomes extremely
difficult to achieve with discrete components as the two poles of the loop gain come closer to
each other causing instability and overshoot. The 4-PAM receiver has a sensitivity of -13 dBm
at 2.2 Gbps and -19.2 dBm at 1.8 Gbps.
4.4
Defining the gigabit MOST standard
It must be clear by now that PCS is a promising transmission medium. The attenuation
during the test process was nearly absent, even at 32 m. In comparison to POF, much larger
distances can be bridged although it has to be noted that the POF cable wasn’t excited at its
optimal wave length. The modal dispersion could not be compared between the two fibers. It
forms however the most prominent limitation for SI-PCS when high bitrates are desired. The
maximum distance that must be covered in the automotive sector counts 20 m. Considering
the newly derivated transmission capacity, a maximum baudrate of 300 MBd is possible. This
is extended to 600 Mbps with 4-PAM. This means that the transmission speed can range from
600 Mbps to 2.2 Gbps depending on the length of the optical link. To lower the production cost,
only one type of transmitter-receiver combination should be developed . This will have to be
dimensioned at the highest operating baudrate and taking into account previous conclusions,
be implemented with 4-PAM modulation. But it was also shown that NRZ performs better at
lower data rates which is equivalent to covering longer distances. Thus, the proposed solution
is not optimal and is mainly restricted by the SI-PCS fiber. The bandwidth-length product can
be increased to 30 MHz·km when semi GI-PCS is used [27]. This type of fiber allows ISI-free
baudrates up to 2 GBd for 20 m which is more than sufficient. By using semi GI-PCS, the
built 4-PAM transmitter-receiver combination can achieve 2.2 Gbps over the desired distance
of 20 m.
Remark that distances of 20 m only occur when using a star network structure. The
current MOST standard however is based on a ring network which limits the fiber length.
Higher bitrates with SI-PCS become realistic this way. It has however some disadvantages:
the receiver must have a large dynamic range and the SNR degrades with every node passed
Chapter 4. Evaluation of the complete system
69
in the ring. Due to the harsh environment, extra noise can be induced by EMI. Until now
this isn’t really an issue because the data rate is restricted to 150 Mbps and the noise current
of the receiver is very low. The interference can result in a problem if information must be
sent at gigabit speeds as sensitivity becomes worse. For this reason, the author of this work
recommends applying a star network topology using 4-PAM modulation with semi GI-PCS
fiber. Error correcting codes should be used to decrease the BER from 10−3 to 10−9 . Cyclic
Redundancy Codes are already implemented in MOST25, 50 and 150 [5] and it has to be
investigated if they are still satisfactory.
In chapter one were provisional specifications set up for the new PCS/VCSEL system.
With the knowledge of the results achieved with the developed driver-receiver combination,
these specifications can be corrected if necessary. They can be consulted in Table 4.2. The
output power of the VCSEL that couples into the fiber was measured with an optical power
meter from Thorlabs. The maximum average output power amounts -8 dBm. Considering the
modulation scheme for the current and the efficiency of the VCSEL according to the datasheet,
the laser diode emits -1.5 dBm average optical power. The interface of the VCSEL to the PCS
core apparently introduces a loss of 6.5 dB. Measurements at 1m PCS show a received optical
power of -13 dBm. If the attenuation of the fiber is neglected, which is valid for PCS, another
5 dB is lost with the interface to the photodiode. The loss of the complete system accumulates
to 11.5 dB. This shows that alignment is very critical with thin core fibers. Remark that
these values are a rough approximation since too many time-variant parameters exist. The
maximum received power where linearity is guaranteed is restricted by the 1dB compression
point of the post amplifier given in Table 3.10. When this voltage is referred back to the input
of the receiver, a corresponding power of -12.3 dBm arises. Accounting for the losses of the
interconnection, the transmit power must stay below -0.8 dBm. This condition is satisfied with
the present transmitter topology.
The power budget is related to the transmit power and the sensitivity. The system has a
sensitivity of -13.6 dBm for 2.2 Gbps and -19.2 dBm for 1.8 Gbps. The dynamic range of the
system depends on the maximum received power and the sensitivity. To extend the dynamic
range and power budget, the maximum bitrate is chosen at 1.8 Gbps. If the coupling loss can
be minimized with efficient connectors, the transmit power can be decreased. Although the
initially desired 2.5 Gbps was not achieved, a bitrate of 1.8 Gbps comes close to the target. A
summary of the new MOST standard is listed in Table 4.2.
70
Chapter 4. Evaluation of the complete system
Table 4.2: Suggested specifications for the new MOST standard with the driver-receiver of this work
transmitter
fiber
modulation
transmit power
maximum received power
sensitivity
dynamic range
power budget
coupling loss
BER (before error correction)
maximum length
bitrate
850 nm VCSEL
semi GI-PCS
4-PAM
-1.5 dBm
-12.3 dBm
-19.2 dBm
6.9 dB
17.7 dB
10.5 dB
10−3
20 m
1.8 Gbps
Chapter 5
Conclusion
5.1
Conclusion
A 4-PAM optical communication system for PCS was built using discrete transistors from
Infineon. The sensitivity of the system is -19.2 dBm at 1.8 Gbps and -13 dBm at 2.2 Gbps for
a theoretical BER of 10−4 . The transmitter is composed of an 850 nm VCSEL from Optek
and a laser driver. This driver is characterized by symmetrical rise and fall times of 120 ps.
The fast response was realized by avoiding the use of back termination or an RC-matching
network. It consumes 65 mW at a supply of 5 V. The receiver consists of a Hamamatsu
photodiode, a cascode TIA and an emitter degenerated post amplifier. The bandwidth of the
cascade amounts 700 MHz. It has an impressive 87.1 dB transimpedance gain which is lineair
amounts 200 nA and can compete with recent
for an input power below -12.3 dBm. The irms
n
BiCMOS implementations mentioned in literature. The power dissipation is rather high at 510
mW with a 5 V power supply.
Different test setups with SI-PCS revealed a bandwidth-length product of 4.5 MHz·km
which is lower than stated in some articles. This limits the maximum length to less than
6 m at 1.8 Gbps. If longer distances at this speed are pursued, semi GI-PCS provides an
alternative. It’s bandwidth-length product is specified at 30 MHz·km. The measurements
also demonstrated that 4-PAM is preferred above NRZ when multi-gigabit speeds have to be
realized with discrete transistors.
5.2
Suggestions for future work
Thanks to this thesis, a basic 4-PAM transmitter-receiver was developed ready for use. The
performance was mainly evaluated by theoretical analysis. It would be interesting to build
a complete system such that the BER can be measured realtime with a BERT scan. Both
software and hardware are necessary to fulfill this task. Gray coding and error correcting codes
are firstly applied to the bitstream followed by a mapping to 4-PAM symbols. This 4-PAM
symbol stream must provide the necessary differential and common mode voltage to switch the
two differential pairs of the driver. A post amplifier with AGC replaces the present amplifier
in the receiver. The TIA with PA is normally followed by a CDR for extracting a trigger clock.
71
Chapter 5. Conclusion
72
This can be circumvented by using the clock output from the generator. The last hardware
block consists of a decision circuit with three slicing levels, e.g. a 2-bit flash ADC. The digital
signal is then sent to the software decoder where the original bitstream is reconstructed and
the BER is calculated. The design of the complete system could be done with two people.
A feasible implementation at board level would probably restrict the bitrate below 1 Gbps
because of the complexity.
Appendix A
Influence of VCSEL parameters on
the driver matching network
Bode Diagram
60
L =1nH
v
Lv=2nH
L =3nH
v
L =4nH
v
Lv=5nH
Lv=6nH
Phase (deg)
30
0
−30
7
10
8
9
10
10
10
10
Frequency (Hz)
Figure A.1: Phase of the impedance for different package inductance LV
73
Appendix A. Influence of VCSEL parameters on the driver matching network
Bode Diagram
60
Cv=0.5pF
Cv=0.75pF
Cv=1pF
Cv=1.25pF
Cv=1.5pF
Cv=1.75pF
Phase (deg)
30
0
−30
7
10
8
9
10
10
10
10
Frequency (Hz)
Figure A.2: Phase of the impedance for different junction capacitance CV of the VCSEL
Bode Diagram
60
Rv=20Ω
Rv=30Ω
Rv=40Ω
Rv=50Ω
Phase (deg)
30
0
−30
7
10
8
9
10
10
10
10
Frequency (Hz)
Figure A.3: Phase of the impedance for different series resistance RV of the VCSEL
74
Appendix B
Additional eye diagrams for PCS
4-PAM
NRZ
50 mV/div, 250 ps/div
50 mV/div, 200 ps/div
BER 1x10-4
BER 3x10-6
Figure B.1: Eye diagrams at -19.2 dBm input power and 1.8 Gbps with a PRBS of 231 − 1 for 1 m
PCS
200 mV/div, 1 ns/div
BER 5x10-6
Figure B.2: NRZ eye diagram at -13.6 dBm input power and 400 Mbps with a PRBS of 231 − 1 for
32 m PCS
75
Bibliography
[1] O. Strobel, R. Rejeb, and J. Lubkoll, “Optical polymer and polymer-clad silica fiber data
buses for automotive applications,” IEEE, 2010.
[2] E. Säckinger, Broadband circuits for optical fiber communication. Wiley, 2005.
[3] Z. Olaf, K. Jurgen, Z. Peter, and D. Werner, POF Handbook: Optical short range transmission systems. Springer, 2008.
[4] K. Thomas and P. Stefan, “Optical data buses for automotive applications,” Journal of
lightwave technology, 2004.
[5] G. Andreas, MOST, the automotive multimedia network. Franzis, 2008.
[6] A. Mohamed, S. Robert, and Z. Horst, “An integrated optical receiver for 2.5 gbit/s using
4-pam signaling,” International conference on Microelectronics, 2010.
[7] AN: Modulating VCSELS, 1998.
[8] AN: Maintaining average power and extinction ratio, part 1, 2008.
[9] AN: Interfacing Maxim laser drivers with laser diodes, 2008.
[10] V. Sankaro, “A new power efficient current-mode 4-pam transmitter interface for off-chip
interconnect,” Circuits and Systems, vol. 1, pp. 959–962, 2010.
[11] A. Kern, CMOS circuits for VCSEL-based optical IO. PhD thesis, Massachusetts Institute
Of Technology, 2007.
[12] H. Johnson, High-speed digital design, a handbook of black magic. Prentice Hall, 1993.
[13] C. Moylan, Optical Fiber Communication: Lecture12, 2011. http://emechatronix.com/
2011/12/24/optical-fibre-communication-ppt-lecture-notes/.
[14] J. Vandewege, High speed electronics. Ugent, 2010.
[15] C. Hermans and M. Steyaert, Broadband Opto-Electrical Receivers in Standard CMOS.
Springer, 2007.
[16] G. Weiss, “Network theorems for transistor circuits,” IEEE transactions on education,
vol. 37, 1994.
[17] Agilent technologies: AC simulation, 2005.
[18] M. Moeneclaey, Communicatietechniek. Ugent, 2010.
77
78
Bibliography
[19] I. Mark and S. Michel, “A 1-gb/s 0.7-µm cmos optical receiver with full rail-to-rail output
swing,” IEEE journal of solid-state circuits, vol. 34, 1999.
[20] G. Halkias, N. Haralabidis, E. Kyriakis-Bitzaros, and S. Katsafouros, “1.7 ghz bipolar
optoelectronic receiver using conventional 0.9µm bicmos process,” ISCAS, 2000.
[21] Y. Nguyen and Q. Hoang Duong, “A high linearity, low noise and high gain transimpedance
amplifier,” IEEE, 2006.
[22] Agilent: spectrum analyzer basics, year not mentioned.
[23] Spectrumsoftware, Plotting loop gain and phase margin,
spectrum-soft.com/news/winter2001/loopgain.shtm.
2001.
http://www.
[24] Spectrumsoftware, Simulating loop gain, 1997. http://www.spectrum-soft.com/news/
spring97/loopgain.shtm.
[25] A. Mohamed, W. Gaber, and H. Zimmerman, “Multilevel signaling optical receiver for
high-speed transmission over large-core step-index plastic optical fibre,” Analog Integrated
Circuits and Signal Processing, vol. 67, pp. 3–9, 2011.
[26] M. P. Sung and Y. Hoi-Yun, “1.25-gb/s regulated cascode cmos transimpedance amplifier
for gigabit ethernet applications,” IEEE journal of solid-state circuits, vol. 34, 1999.
[27] Z. Olaf, P. Hans, and V. Juri, “Potential of high speed, short distance optical data communication on large diameter optical fibers,” Electronics Systemintegration Technology
Conference, 2006.