Frequency Response of Linear Time Invariant Systems
advertisement

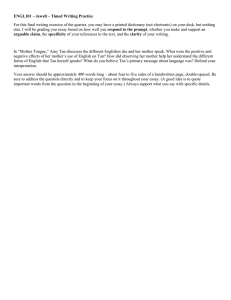
ME 3281, Spring 2013, Prof. Rajamani, University of Minnesota Frequency Response of Linear Time Invariant Systems Complex Numbers: Recall that every complex number has a magnitude and a phase. Example: z = a + bj, j = √−1 a is called the real part of z, a = Re(z) b is called the imaginary part of z, b = Im(z) Magnitude of z: |z| = √(a2 + b 2 ) = √Re(z)2 + Im(z)2 b Im(z) Phase of z: ∠z = tan −1 ( ) = tan −1 ( ) a Re(z) Bothe the magnitude and phase of a complex number are real. What is the steady state response of any LTI system for a sinusoidal input of frequency ω? Assume that the system is stable : All its poles have negative real parts. For example: X(s) = 1 F(s) ms 2 + bs + k ME 3281, Spring 2013, Prof. Rajamani, University of Minnesota ω (sinusoid) s 2 + ω2 1 ω Then X(s) = . ms 2 + bs + k s 2 + ω2 If F(s) = After partial fraction expansion, and inverse Laplace transforms, we will find: x(t) = Ae−ζωn t sinωd t + Be−ζωnt cosωd t + Csinωt + Dcosωt Amplitude of steady state oscillation = √C 2 + D2 Thus, steady state oscillation is at the same frequency as the input frequency. Example: Given Y(s) = 3 U(s) s+4 If the input u(t) = sin2t, find the steady state response y(t). Solution: u(t) = sin2t ⇒ U(s) = Y(s) = 2 s2 + 4 3 2 A Bs + C . 2 = + 2 s+4 s +4 s+4 s +4 A(s 2 + 4) + (Bs + C)(s + 4) = 6 s = −4 ⇒ A((−4)2 + 4) = 6 A= 6 3 = 20 10 As 2 + Bs 2 + 0 ⇒ B = −A = − 4A + 4C = 6 3 10 ME 3281, Spring 2013, Prof. Rajamani, University of Minnesota 4C = 6 − 4A = 6 − C= Y(s) = 12 48 = 10 10 12 6 = 10 5 3 1 3 s 6 1 . − . 2 + . 2 10 s + 4 10 s + 4 5 s + 4 y(t) = 3 −4t 3 3 e − cos2t + sin2t 10 10 5 3 −4t e ∶ Transient response → 0 as t → ∞ 10 − 3 3 cos2t + sin2t ∶ Steady state response 10 5 Amplitude of steady state response? Phase of steady state response? − 3 6 3 6 √45 cos2t + sin2t = cos2t + sin2t] [− 10 10 10 √45 √45 = √45 √45 [sinα cos2t + cosα sin2t] = sin(2t + α) 10 10 √32 + 62 = √45, Amplitude = cosα = 6 √45 , sinα = − 3 √45 √45 √9.5 3√5 = = 10 10 10 3 1 Phase = α = tan−1 (− ) = tan−1 (− ) 6 2 It turns out that the amplitude and phase are given by: |y| = |G(jω)|ω=2 ∠y = ∠G(jω)ω=2 Check: G(s) in this example is ME 3281, Spring 2013, Prof. Rajamani, University of Minnesota G(s) = 3 s+4 Let s = jω, j = √−1 G(jω) = = ω=2 3 3 jω − 4 3(jω − 4) 3(jω − 4) = . = = jω + 4 jω + 4 jω − 4 j2 ω2 − 42 −ω2 − 16 3(4 − jω) 12 3jω = − ω2 + 16 ω2 + 16 ω2 + 16 rad , s G(jω) = |G(jω)|ω=2 ∠G(jω)ω=2 12 6 12 6 3 3 − j= − j= − j 4 + 16 4 + 16 20 20 5 10 3 2 3 2 1 √45 √ √6 2 + 3 2 = = ( ) +( ) = 5 10 10 10 3 1 − 1 = tan−1 ( 10 ) = tan−1 ( 10 ) = tan−1 (− ) 3 1 2 5 5 − Thus, the amplitude and phase of the response turned out to be equal to |G(jω)|ω=2 and ∠G(jω)ω=2 respectively. Generalized Result: If Y(s) = G(s)U(s), where G(s) is stable with all poles having –ve real parts, and u(t) = sinωt, then y(t) = |G(jω)|sin(ωt + ∠G(jω)) ME 3281, Spring 2013, Prof. Rajamani, University of Minnesota April 11, 2013 Calculating magnitude and phase of a complex number z = a + bj, |z| = √(a2 + b 2 ), z= b ∠z = tan−1 ( ) a a + bj (a + bj)(c − dj) (a + bj)(c − dj) = = c + dj (c + dj)(c − dj) c 2 − d2 j2 ac − adj + bcj − bdj2 (ac + bd) + j(bc − bd) = = c 2 + d2 c 2 + d2 |z| = 1 √(ac + bd)2 + (bc − bd)2 2 2 c +d = 1 √a2 c 2 + b 2 d2 + 2acbd + b 2 c 2 + a2 d2 − 2abcd c 2 + d2 = 1 √a2 (c 2 + d2 ) + b 2 (a2 + d2 ) c 2 + d2 √c 2 + d2 √a2 + d2 √a2 + d2 = = c 2 + d2 √c 2 + d2 Hence a + bj √a2 + d2 Mag of num z= ⇒ |z| = = c + dj Mag of den √c 2 + d2 Likewise z = (a + bj)(c + dj) |z| = √a2 + d2 √c 2 + d2 = (Mag of first factor)(Mag of second factor) For phase calculations, z = (a + bj)(c + dj) b d ∠z = tan−1 ( ) + tan−1 ( ) a c ME 3281, Spring 2013, Prof. Rajamani, University of Minnesota z= a + bj c + dj b d ∠z = tan−1 ( ) − tan−1 ( ) a c Thus, calculating the magnitude and phase of a transfer function is easy and can be calculated from the magnitude and phase of the individual factors. Sample example: Let Y(s) = G(s)U(s), with G(s) = 9s + 14 3(s 2 + 4s + 3) If u(t) = 6cos2t , find the steady state response yss (t). Solution: G(jω) = 9jω + 14 3(j2 ω2 + 4jω + 3) G(jω)|ω=2 = 18j + 14 18j + 14 = 3(−22 + 8j + 3) −3 + 24j |G(jω)|ω=2 = √182 + 142 √32 + 242 ∠G(jω)ω=2 = tan−1 ( = 0.9427 18 24 ) − tan−1 ( ) = −0.7853 radians 14 −3 yss (t) = 0.9427(6) cos(2t − 0.7853), or yss (t) = 5.656 cos(2t − 0.7853) ME 3281, Spring 2013, Prof. Rajamani, University of Minnesota Frequency Response Plots or Bode Plots |G(jω)| can be plotted as a function of ω. ∠G(jω) can be plotted as a function of ω. Together these are called the frequency response plot of G(s). The |G(jω)| plot describes the amplitude of steady state oscillations over all frequencies. Example: Input Force F(t) Output: x(t) 𝑚𝑥̈ + 𝑏𝑥̇ + 𝑘𝑥 = 𝐹(𝑡) … … … … … . . ③ Find the frequency response of this system. Find the Laplace transform of ③, using the initial conditions as zero. ms 2 X(s) + bsX(s) + kX(s) = F(s) X(s) 1 = ………………..④ F(s) ms 2 + bs + k X(s) 1 = G(s) = 2 F(s) ms + bs + k G(jω) = 1 1 1 = = m(jω)2 + bjω + k −mω2 + bjω + k (k − mω2 ) + j(bω) ME 3281, Spring 2013, Prof. Rajamani, University of Minnesota |G(jω)| = 1 √(k − mω2 )2 + b 2 ω2 If |G(jω)| is plotted as a function of ω, the plot is as follows: It turns out we just need to learn the |G(jω)| Vs. ω plot for 5 different transfer functions (all 1st and 2nd order transfer functions). ——We would then be able to interpret and understand frequency response of all systems. Likewise, we just need to learn the ∠G(jω) Vs. ω plot for the same 5 transfer functions. ——We can then interpret the phase plot of all systems. For the mass-spring-damper system under consideration, ME 3281, Spring 2013, Prof. Rajamani, University of Minnesota G(jω) = 1 (k − mω2 ) + j(bω) Hence ∠G(jω) = −tan−1 ( bω ) k − mω2 ∠G(jω) provides the phase difference between F(t) and x(t) at various input frequencies ω. Agenda: To learn the magnitude frequency response plots for the following transfer functions 1). G(s) = 1 s 2). G(s) = s 2). G(s) = 1 Ts+1 4). G(s) = Ts + 1 5). G(s) = ωn 2 s2 +2ζωn s+ωn 2 We will use these 5 magnitude frequency response plots to analyze a # of engineering problems.