SEISMIC ANALYSIS 8.1 Introduction Stability of a slope
advertisement

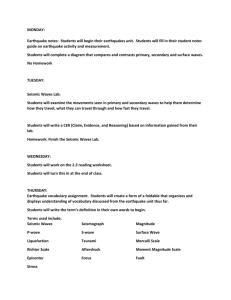
SEISMIC ANALYSIS 8.1 Introduction Stability of a slope can be affected by seismicity in two ways: earthquake and blasting. These seismic motions are capable of inducing large destabilizing inertial forces. In general, three methods of analysis have been proposed for the evaluation of slopes response under such conditions. 1. Pseudostatic Method: The earthquake’s inertial forces are simulated by the inclusion of static horizontal and vertical forces in limit equilibrium analysis. 2. Newmark’s Diaplacement Method: This method is based on the concept that the actual slope accelerations may exceed the static yield acceleration at the expense of generating permanent displacements (Newmark, 1965). 3. Dynamic Finite Element Analysis: This is a coupled two or three dimensional analyses using appropriate constitutive material model that will provide details of concerning stresses, strains, and permanent displacement. When a seismic motion occurs, different types of seismic waves are produced. The main seismic wave types are Compression (P), Shear (S), Rayleigh (R) and Love (L) waves. P and S waves are known as body waves, because they propagate outward in all directions from source (such as an earthquake) and travel through the interior of the earth. Love and Rayleigh waves are surface waves and propagate approximately parallel to the earth’s surface. 1 Figure 8.1: Typical seismogram ( www.geo.mtu.edu) Figure 8.2: definition of earthquake terms (www.culcanhammer.net) 2 8.2 Types of seismic wave P wave is primary compression type, characterized by alternative compressions and dilations, with their direction same as the direction in which the wave is propagating. Its is around 5-7 Km/s. among all the seismic waves, P wave travels fastest in materials, so it obtained first on a seismogram. The motion of S (secondary wave) is transverse in nature and is in the direction perpendicular to the direction of propagation. Typical velocity of S wave in earth crust is 3-4 Km/s. These do not travel through fluids, so do not exist in earth’s outer core (inferred to be primarily liquid iron) or in air or water or molten rock (magma). S waves travel slower than P waves. The motion of L (love) or surface wave is transverse horizontal, perpendicular to the direction of propagation and generally parallel to the earth’s surface. This wave exists because of the earth’s surface. The amplitude is largest at the surface and decrease with depth. Love waves are dispersive, i.e. the wave velocity is dependent on frequency; with low frequencies propagating at higher velocity. Depth of penetration of the Love waves is also dependent on frequency, with lower frequencies penetrating to greater depth. R (Rayleigh) wave is another surface wave which has its motion both in the direction of propagation and perpendicular and phased, so that the motion is generally elliptical either prograde or retrograde. Rayleigh waves are also dispersive and its amplitudes generally decreases with depth. Appearance and particle motion are similar to water waves. Depth of penetration of the Rayleigh waves is also dependent on frequency, with lower frequencies penetrating to greater depth. 3 The magnitude of an earthquake is related to the amount of energy released during the event. Seismic energy attenuates as it travels away from the zone of energy release and spreads out over a greater volume of material. Hence, intensity of the bedrock motion decreases as the distance of a particular site from the zone of energy release increases. Measurement of mechanical properties of soil and rock masses is, to a certain extent, possible with seismic methods. If P and S waves are measured, a so-called ‘seismic E modulus’ and ‘seismic Poisson’s ratio’ can be determined: 𝜆 + 2𝜇 𝜌 P– wave velocity = Vp = � 𝜇 𝜌 S– wave velocity = Vs = � Seismic Young ′ s modulus = E = Seismic Poission′ s ratio = σ = 𝜇(3𝜆 + 2𝜇) (𝜆 + 𝜇) 𝜆 2(𝜆 + 𝜇) Where, λ and µ, are lame′ s constant, ρ, the desity of material The relation between the frequency and the wavelength is: V=f X λ Where, V is the velocity of seismic wave, f is its frequency, and λ is the wavelength 4 The relation by deere et. al. relates Rock Quality Designation to seismic velocities measured in the field and in the laboratory: � V�ield VLaboratory � X 100 % ≈ RQD V field = seismic velocity measured in the field V laboratory = seismic velocity measured in the laboratory Where, RQD is the Rock Quality Designation. The seismic velocity measured in the laboratory is done on intact rock. The velocity measured in the field is the velocity of a signal passing through intact rock but also through or around discontinuities and will hence result in a lower velocity. Inhomogeneities in soil or rock mass, such as boulders in a soil or joints in rock mass will not individually be detected if the wavelength of seismic wave is low compared to the dimensions of the inhomogeneities. 5 8.3 Dynamic Soil Properties Important elements in a seismic response analysis are: input motions, site profile, static soil properties, dynamic soil properties, constitutive models of soil response to loading and methods of analysis using computer programs. The contents include: earthquake response spectra, site seismicity, soil response to seismic motion, seismic loads on structures, liquefaction potential, lateral spread from liquefaction, and foundation base isolation. The properties that are most important for dynamic analyses are the stiffness, material damping, and unit weight. These properties enter directly into the computations of dynamic response. In addition, location of the water table, degree of saturation, and grain size distribution may be important, especially when liquefaction is a potential problem. One method of direct determination of dynamic soil properties in the field is to measure the velocity of shear waves in the soil. The waves are generated by impacts produced by a hammer or by detonating charges of explosives and travel times are recorded. This is usually done in between bore holes. Figure 3: Relation between number of blows per foot in standard penetration test and velocity of shear waves 6 7 8.4 Field Measurements of Dynamic Modulus Direct measurement of soil or rock stiffness in the field has the advantage of minimal material disturbance. The measurements are not constrained by the size of a sample. Dissipation of energy during strain, i.e. material damping, requires significant strains to occur. In situ techniques are based on measurement of the velocity of propagation of stress waves through the soil. The Pwaves or compression waves are dominated by the response of the pore fluid in the saturated soils. Consequently, most techniques measure S-waves or shear waves. If the velocity of the shear wave through a soil deposit is determined to be Vs, the shear modulus G is given as: Where, G = pVs2 = Y 2 V g s p = mass density of soil. Y = unit weight of soil. g = acceleration due to gravity. There are three techniques for measuring shear wave velocity in in-situ soil; cross- hole, downhole, and uphole. All the three techniques require boring to be made in the in-situ soil. In the cross-hole method, sensors are placed at one elevation in one or more bore holes. A source of energy is triggered in another bore hole at the same elevation. The waves travel horizontally from the source to the receiving hole. The arrival of the S-waves is noted on the traces of the response of the sensors. The velocity of S-wave can be calculated by dividing the distance between bore holes by the time for a wave to travel between them. Thus, the measured travel time reflects the cumulative travel through layers with different wave velocities. Interpreting the data requires sorting out the contribution of the layers. 8 8.5 Ground Motion Estimates Ground motion attenuation equations are used to determine the level of acceleration as a function of distance from the source as well as the magnitude of the earthquake. Correlations have been made between peak acceleration and other descriptions of ground motion with distance for various events. These equations allow the engineers to estimate the ground motions at a site from a specified event. They also allow engineers to find out the uncertainty associated with the estimate. There are a number of attenuation equations that have been developed by various researchers. Donovan and Bornstein (1978), developed the following equation for peak horizontal acceleration. Y = (a)(exp(bM))(r + 25)d a = (2,154,000)(r)−2.10 b = (0.046) + (0.445) log(r) Where, d = (2.515) + (0.486)log (r) Y = peak horizontal acceleration (in gal)(1 gal = 1cm/sec 2 ) M = earthquake magnitude and r = distance to energy center in km, default value 5 km. Several methods for evaluating the effect of local soil conditions on ground response during earthquakes are now available. Most of these methods are based on the assumption that the main responses in a soil deposit are caused by the upward propagation of horizontally polarized shear waves (SH waves). These waves are propagated from the underlying rock formation. Analytical procedures based on this concept incorporating linear approximation to nonlinear soil behavior have been shown to give results in fair agreement with field observations in a number of cases. The analytical procedure generally involves the following steps: (a) Determining the characteristics of the motions likely to develop in the rock formation underlying the site. The maximum acceleration, predominant period, and effective duration are the most important parameters of an earthquake motion. Empirical relationships between these 9 parameters and the distance from the causative fault to the site have been established for earthquakes of different magnitudes. (b) Determining the dynamic properties of the soil deposit. Average relationships have been established to estimate dynamic shear modulus as a function of shear strain and static properties for various soil types (Seed and Idriss, 1970). Average relation between the damping ratios of soils as functions of shear strain and static properties have also been established. Thus a testing program to obtain the static properties for use in these relationships will often serve to establish the dynamic properties with a sufficient degree of accuracy. (c) Computing the response of the soil deposit to the base rock motions. A one-dimensional method of analysis can be used if the soil structure is essentially horizontal. 8.6 Factors Affecting Ground Motion: Factors that affect strong ground motion include: (a) Wave types—S and P waves that travel through the earth, as well as the surface waves that propagate along the surfaces or interfaces. (b) Earthquake magnitude—There are several magnitude scales. Even a small magnitude event may produce large accelerations in the near field. Consequently, a wide variety of acceleration for the same magnitude may be expected. (c) Distance from epicenter or from center of energy release. (d) Site conditions. (e) Fault type, depth, and the recurrence interval. The selection of a design earthquake may be based on: (a) Known design-level and maximum credible earthquake magnitudes. These are associated with a fault whose seismicity has been estimated. (b) Specification of probability of occurrence of the earthquake for a given life of the structure (such as having a 10 percent chance of being exceeded in 50 years). (c) Specification of a required level of ground motion. This specification is available in the code provision. (d) Fault length empirical relationships. 10 8.7 Simulation of seismic effect Slope movement is secondary effect of earthquake or blasting. For rock slopes, earthquake induced slope movement is divided into falls and slides. In general there are two basic approaches to incorporate the seismic effect on slope stability i.e. Inertia slope stability analysis and weakening slope stability analysis. It is preferred if material retains its shear strength during earthquake. Weakening slope stability analysis is preferred if material experiences significant shear strength reduction during earthquake. During liquefaction, there are two cases of weakening slope stability analyses. Flow slide develops when the static driving forces exceed shear strength of soil along failure surface. In lateral spreading, static driving forces do not exceed shear strength of soil along slip surface. Instead, driving forces only exceed resisting forces during those portions of earthquake that impart net inertial forces in the downward direction. This results in progressive and incremental lateral movement. Soils which dilate during seismic shaking, or do not exhibit reduction in shear strength with strain, clay with low sensitivity, soils located above water table and landslides having distinct rupture surface are examples, where material retain shear strength during earthquake. Inertia slope analysis is preferred for these cases. Foliated or friable rock, which undergo fracture during earthquake, sensitive clays, overloaded soft and organic soils as well as loose soils located below water table and under liquefaction induced excess pore water pressure are examples where material experiences sufficient shear strength reduction during earthquake. Weakening slope stability analyses is preferred for them. 11 8.8 Pseudo-static approach In pseudo-static methods, the cyclic earthquake motion is replaced with a constant horizontal acceleration equal to kc(g), where kc is the seismic coefficient, and g is the acceleration of gravity. A force is applied to the soil mass equal to the product of the acceleration and the weight of the soil mass. The limit equilibrium method is modified to include horizontal and vertical static seismic forces that are used to simulate the potential inertial forces due to ground accelerations in an earthquake. In pseudostatic slope stability analyses, a factor of safety against failure is computed using a static limit equilibrium stability procedure, in which a pseudostatic, horizontal inertial force, which represents the destabilizing effects of the earthquake, is applied to the potential sliding mass. This method is easy to understand and is applicable for both total and effective stress slope stability analyses. The method ignores cyclic nature of earthquake. It assumes that additional static force is applied on the slope due to earthquake. In actual analysis, a lateral force acting through centroid of sliding mass, is applied which acts out of slope direction. This pseudostatic lateral force F h is calculated as follows: Where, Fh = ma = Wa Wamax = = khW g g F h = horizontal pseudostatic force acting through centroid of sliding mass out of slope direction. m=total mass of slide material W=total weight of slide mass a= acceleration, maximum horizontal acceleration at ground surface due to earthquake (= amax ) a max = peak ground acceleration a max /g=seismic coefficient 12 A considerable limitation of the pseudostatic approach is that the horizontal force representing the effects of seismicity is constant and acts in only one direction. With dynamically applied loads, the force may be applied for only a few tenths of a second before the direction of motion is reversed. The result of these transient forces will be a series of displacement pulses rather than complete failure of the slope. Seismicity subjects sliding mass to vertical as well as horizontal pseudostatic forces. However, the effect of vertical pseudostatic force on sliding mass is ignored as it has very little effect on its slope stability. Although, the weight of the sliding mass W can be readily estimated, selection of seismic coefficient requires considerable experience and judgement. Certain guidelines regarding selection of seismic coefficient are as follows: • • Higher the value of peak ground acceleration, higher is the value of k h . • k h is also determined as function of earthquake magnitude. • Sometimes local agencies suggest minimum value of seismic coefficient. • • When items 1 and 2 are considered, k h should never be greater than For small slide mass, k h = amax g amax g . . amax • For intermediate slide mass, k h =0.65 • k h =0.15 for sites near faults generating 8.5 magnitude earthquake. g . For large slide mass, k h =0.1 for sites never generating 6.5 magnitude earthquake and, k h =0.1 for severe earthquake, = 0.2 for violent and destructive earthquake and=0.5 for catastrophic earthquake. Wedge Method This is simplest type of slope stability analysis. A wedge failure has planar slip surface, inclined at an angle α to horizontal. Analysis could be performed for the case of planar slip surface intersecting the face of slope or passing through toe of slope. Factor of safety for pseudostatic analysis is obtained as follows: 13 For total stress analysis: FOS = cL + Ntan∅ cL + (Wcos ∝ −Fh sin ∝)tan∅ resisting force = = Wsin ∝ +Fh cos ∝ driving force Wsin ∝ +Fh cos ∝ For effective stress analysis: Where, FOS = c ′ L + (W cos ∝ −Fh sin ∝ −uL)tan∅′ c ′ L + N tan∅ = Wsin ∝ +Fh cos ∝ W sin ∝ +Fh cos ∝ FOS= factor of safety for pseudostatic analysis u= average pore water pressure along slip surface c’ and ∅’ are the effective cohesion and friction angle material For total stress analysis, total stress parameters of soil should be known and is often performed for cohesive soils. For effective stress analysis, effective stress parameters of soil should be known and is often performed for cohesionless soils. For this purpose pore water pressure along slip surface should also be known. For soil layers above water table, pore water pressure is assumed zero. If the soil is below water table and water table is horizontal, pore water pressure below water table is hydrostatic. In case of sloping water table, flow net can be used to estimate pore water pressure below water table. Method of Slices In this method, failure mass is subdivided into vertical slices and factor of safety is determined based on force equilibrium equations. A circular arc slip surface and a rotational failure mode is often used in this method. The resisting and the driving forces are calculated for each slice and then summed to obtain factor of safety of the slope. Factor of safety can be calculating the resisting forces to driving forces for each slice and then summed to obtain factor of safety. However, this method involves more unknowns than equilibrium equations in the method of slices. Consequently, an assumption is to be made concerning interslice forces. In ordinary method of slices, resultant of interslice forces is parallel to average inclination of slice, α. Bishop simplified, Janbu simplified, Janbu generalized, Spencer method and Morgenstern Price method 14 are other methods of slices. Because of the tedious nature of calculations, computer programs are routinely used to perform the pseudostatic slope stability analysis using the method of slices. 8.9 Inertia Slope Stability – Newmark Method The Newmark [1965] analysis assumes that relative slope movements would be initiated when the inertial force on a potential sliding mass is large enough to overcome the yield resistance along the slip surface, and these movements stop when the inertial force decreases below the yield resistance and the velocities of the ground and sliding mass coincides. The yield acceleration is defined as the average acceleration producing a horizontal inertial force on a potential sliding mass which gives a factor of safety of one and can be calculated as the seismic coefficient in pseudostatic slope stability analyses that produces a safety factor of one. Newmark’s method assumes: existence of a well-defined slip surface, a rigid, perfectly plastic slide material, negligible loss of shear strength during shaking, and that permanent strains occur if the dynamic stress exceeds the shear resistance. Also, the slope is only presumed to deform in the downslope direction, thus implying infinite dynamic shear resistance in the upslope direction. The procedure requires that the value of a yield acceleration or critical seismic coefficient, ky, be determined for the potential failure surface using conventional limit equilibrium methods. 15 Purpose of this method is to estimate the slope deformation for those cases where the pseudostatic factor of safety is less than 1.0, which corresponds to failure condition. It is assumed that slope will deform during those portions of earthquake when out of slope earthquake forces make pseudostatic factor of safety below 1.0 and the slope accelerates downwards. Longer the duration for which pseudostatic factor of safety is zero, greater the slope deformation. Figure 3 shows horizontal acceleration of slope during earthquake. Accelerations plotting above zero line are out of slope and accelerations plotting below zero line are into slope accelerations. Only out of slope accelerations cause downslope movement and are used in the analysis. In Figrue , a y is horizontal yield acceleration and corresponds to pseudostatic factor of safety exactly equal to 1. Portion of acceleration pulses above ay (darkened portion in Fig. 9.2(a)), causes lateral movement of slope. Fig. 9.2(b) and (c) represent horizontal velocity and slope displacement due to darkened portion of acceleration pulse. Slope displacement is incremental and occurs only when horizontal acceleration due to earthquake exceeds a y . Figure 3: Diagram illustrating Newmark method (a) Accelertion versus time (b) velocity versus time for darkened portion of acceleration pulse (c) corresponding downslope displacement versus time in response to velocity pulse (Day, 2002) 16 Magnitude of slope displacement depends on variety of factors. Higher the ay value, more stable the slope is for a given earthquake. Greater the difference between peak ground acceleration a max due to earthquake and a y , larger the down slope movement. Longer the earthquake acceleration exceeds a y , larger the down slope deformation. Larger the number of acceleration pulses exceeding a y , greater the cumulative down slope movement during earthquake. Most common method used in Newmark method is as follows: Where, log d = 0.90 + log ��1 − ay 253 ay − 1.09 �� �� amax amax d= estimated downslope movement due to earthquake in cm. ay =yield acceleration and amax =peak ground acceleration of design earthquake. Essentially amax must be greater than ay . While using Eq. (9.3), pseudostatic factor of safety is determined first using the technique described in Fig. 9.2. If it is less than 1, k h is reduced till pseudostatic factor becomes equal to 1. This value of k h is used to determine ay using Eq. (9.1). ay and amax are used to determine slope deformation. 17