Document
advertisement

University of Bath
DEPARTMENT OF ARCHITECTURE & CIVIL ENGINEERING
AR40283
LIGHTWEIGHT STRUCTURES
Thursday 14th May 2015
09:30 to 11:30
2 hours
Answer any three questions.
All questions carry equal marks.
Students may take one A4 sheet of notes (both sides filled) into the
examination.
Candidates may only use University-supplied calculators.
PLEASE FILL IN THE DETAILS ON THE FRONT OF YOUR ANSWER
BOOK/COVER AND SIGN IN THE SECTION ON THE RIGHT OF YOUR ANSWER
BOOK/COVER, PEEL AWAY ADHESIVE STRIP AND SEAL.
TAKE CARE TO ENTER THE CORRECT CANDIDATE NUMBER AS DETAILED
ON YOUR DESK LABEL.
DO NOT TURN OVER YOUR QUESTION PAPER UNTIL INSTRUCTED TO BY
THE CHIEF INVIGILATOR
AR40283
QUESTION 1
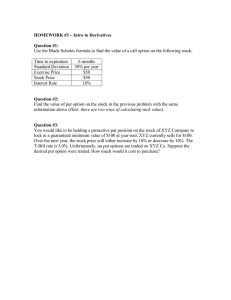
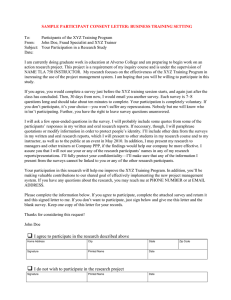
Figure 1 shows the elevation of a tall building whose profile is
optimized against buckling.
The height of the building is h and the vertical coordinate, z , is
measured downwards from the top of the building so that z = h at the
base.
The volume of the vertical structure above the level specified by z is
V = V ( z ) . At the top V ( 0 ) = 0 and the total volume of vertical
structure is V ( h ) . The axial load at the level z is P ( z ) = ρ gV ( z )
where ρ g is assumed constant and is the weight of all the structure,
finishes and live load per unit volume of vertical structure.
dV
and the bending stiffness of the
dz
building is EI in which the tangent modulus E is a known function of
P
and the second moment of area is a known function of A .
σ=
A
Thus EI is a known function of V and A . Figure 1 was produced
2
assuming that E is a constant and I is proportional to A .
The ‘cross-sectional area’ A ( z ) =
When the building buckles sideways the lateral displacement is u ( z )
du
which is assumed small. The drop in
dz
height due to buckling at a given value of z is w ( z ) . ϕ ( h ) and w ( h )
and the rotation is ϕ ( z ) =
are assumed to be zero.
ϕ must adjust itself to minimize the total strain energy plus
gravitational potential energy and we also want to minimize the total
volume of vertical structure.
a) Explain why the total strain energy due to lateral
1 ⎛ dϕ ⎞
movement is U = ∫ EI ⎜
⎟ dz .
2 ⎝ dz ⎠
z=0
h
2
[6 marks]
b) Use Pythagoras’s theorem and the fact that ϕ is small to
explain why
dw
1
= − ϕ2 .
dz
2
[6 marks]
c) Explain why the change in total gravitational potential
h
energy due to buckling is W = − ρ g
∫ Aw dz .
[6 marks]
z=0
d) Hence use integration by parts to demonstrate that
h
1
W = − ρ g ∫ V ϕ 2 dz .
2
z=0
[4 marks]
Figure 1
Page 2 of 10
AR40283
e) In the minimization process the volume and rotation are imagined to be
functions of time so that V = V ( z,t ) and ϕ = ϕ ( z,t ) . Explain how setting
d
(U + W ) = 0 produces
dt
⎡⎛ ∂( EI ) ∂V ∂( EI ) ∂ 2 V ⎞ ⎛ ∂ϕ ⎞ 2
⎤
+
⎥
h ⎢⎜
⎜⎝ ⎟⎠
⎟
1 ⎢⎝ ∂V ∂t
∂A ∂z ∂t ⎠ ∂z
⎥ dz = 0
∫⎢
2
2 z=0
∂ϕ ∂ ϕ
∂V
∂ϕ ⎥
− ρ g ϕ 2 − 2 ρ gVϕ
⎢ +2EI
⎥
∂z ∂z ∂t
∂t
∂t ⎦
⎣
.
f)
[4 marks]
Hence explain how the Euler-Lagrange equations
2
2
d ⎡ ∂( EI ) ⎛ dϕ ⎞ ⎤ ∂( EI ) ⎛ dϕ ⎞
2
⎢
⎜ ⎟ ⎥−
⎜ ⎟ + ρ gϕ = 0
dz ⎣ ∂A ⎝ dz ⎠ ⎦
∂V ⎝ dz ⎠
d ⎛ dϕ ⎞
⎜ EI
⎟ + ρ gVϕ = 0
dz ⎝ dz ⎠
can be derived by using integration by parts.
g) Finally, indicate briefly how the introduction of the variable f ( z ) =
[4 marks]
ϕ
can
⎛ dϕ ⎞
⎜⎝ ⎟⎠
dz
be used to eliminate ϕ to produce one third order non-linear ordinary
differential equation for V ( z ) .
[3 1 3 marks]
This analysis is based (with some modifications for non-linear material behaviour)
upon that in Joseph Keller and Frithiof Niordson, The Tallest Column, Indiana
University
Mathematics
Journal
16
(1967),
433-446.
http://www.iumj.indiana.edu/IUMJ/ISSUE/1967/5
Page 3 of 10
AR40283
QUESTION 2
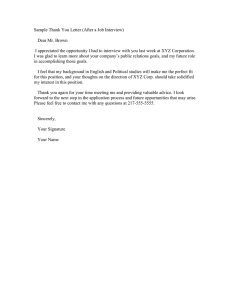
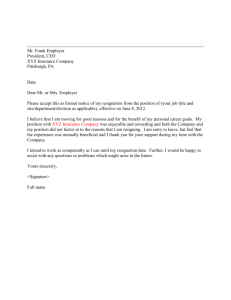
Figure 2
Figure 2 shows a surface being continuously bent. The surface is defined in
Cartesian x, y, z coordinates by the equations
(
)
x = a cos λ cosh θ 2 cosθ 1 + asin λ sinh θ 2 sin θ 1
y = a cos λ cosh θ 2 sin θ 1 − asin λ sinh θ 2 cosθ 1
z = aθ 2 cos λ + aθ 1 sin λ
in which a is a constant and λ varies during the bending process. θ 1 and θ 2 are
surface coordinates or parameters, replacing the u and v that are sometimes used.
When λ = 0 the surface is a catenoid, that is a catenary of revolution. This is the top
left surface in the above figure. When λ =
staircase, the bottom right surface.
π
the surface is a helicoid, like a spiral
2
The above equations can be written in vector form as
r = a cos λ cosh θ 2 p + asin λ sinh θ 2 q + a (θ 2 cos λ + θ 1 sin λ ) k .
in which
p = cosθ 1i + sin θ 1 j
q = sin θ 1i − cosθ 1 j
.
Note that
dp
= −q
dθ 1
,
dq
=p
dθ 1
p⋅p = 1
p⋅q = 0 ,
q⋅q = 1
p⋅k = 0
q⋅k = 0
k⋅k = 1
Page 4 of 10
and
p×q= k
q×k = p.
k×p= q
AR40283
Formulae from differential geometry are given at the end of the examination paper.
a) Demonstrate that the covariant base vectors can be written
∂r
= asin λ ( sinh θ 2 p + k ) − a cos λ cosh θ 2 q
1
∂θ
∂r
g 2 = 2 = a cos λ ( sinh θ 2 p + k ) + asin λ cosh θ 2 q
∂θ
.
g1 =
[8 marks]
b) Hence demonstrate that the components of the metric tensor (also known as the
coefficients of the first fundamental form), gij = g i ⋅ g j are
g11 = g22 = a 2 cosh 2 θ 2
g12 = 0
and comment on the fact that λ does not occur in these results.
c) Calculate the components of the normal, n =
g1 × g 2
g1 × g 2
[8 marks]
and comment on what
happens to the normal during the bending process.
[8 marks]
d) Hence find the coefficients of the second fundamental form, bij = −
e) Demonstrate that the mean curvature,
H=
g11b11 − 2g12 b12 + g22 b22
(
2 g11g22 − g122
means that the surfaces are all minimal or soap film surfaces.
Page 5 of 10
∂n
⋅g .
∂θ i j
)
[6 marks]
= 0 , which
[3 1 3 marks]
AR40283
QUESTION 3
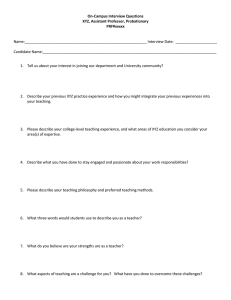
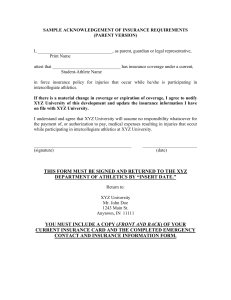
Figure 3
Figure 3 shows a numerical simulation of a fabric hanging from its corners. The
shape will be inverted to define the geometry of a concrete shell.
The numerical simulation used dynamic relaxation to solve the equations. Describe
the steps in each iteration of the dynamic relaxation process. Note that dynamic
relaxation is essentially the same as leapfrog or Verlet integration.
[18 1 3 marks]
The following computer code contains 5 subroutines from the computer program.
Explain what each of the subroutines does in terms of your description of dynamic
relaxation.
[5 x 3 =
15 marks]
void Initialise(int i)
{
for(int j = 0;j <= n;j ++)
{
force[i][j][0] = 0.0;force[i][j][1] = 0.0;force[i][j][2] =
}
}
- weightpernode;
void CalculateForces(int i)
{
for(int j = 0;j <= n;j ++)
{
if(i < m)Axial(i,i + 1,j,j,EAOverTwiceSlackLengthCubed,SlackLengthSq);
if(j < n)Axial(i,i,j,j + 1,EAOverTwiceSlackLengthCubed,SlackLengthSq);
if(i < m && j < n)
{
Axial(i,i + 1,j,j + 1,DiagonalEAOverTwiceSlackLengthCubed,DiagonalSlackLengthSq);
Axial(i,i + 1,j + 1,j,DiagonalEAOverTwiceSlackLengthCubed,DiagonalSlackLengthSq);
}
if(i < m - 1)Bending(i,i + 1,i + 2,j,j,j,bendingStiffnessFactor);
if(j < n - 1)Bending(i,i,i,j,j + 1,j + 2,bendingStiffnessFactor);
}
}
Page 6 of 10
AR40283
void Axial(int i,int inext,int j,int jnext,double thisEAOverTwiceSlackLengthCubed,double
thisSlackLengthSq)
{
double vectorComponents[3];
double lengthSq = 0.0;
for(int xyz = 0;xyz <= 2;xyz++)
{
vectorComponents[xyz] = x[inext][jnext][xyz] - x[i][j][xyz];
lengthSq += vectorComponents[xyz] * vectorComponents[xyz];
}
double tensioncoefficient = thisEAOverTwiceSlackLengthCubed * (lengthSq thisSlackLengthSq);
for(int xyz=0;xyz<=2;xyz++)
{
double thisForceComponent = tensioncoefficient * vectorComponents[xyz];
force[i][j][xyz] += thisForceComponent;
force[inext][jnext][xyz] -= thisForceComponent;
}
}
void Bending(int i,int inext,int inextnext,int j,int jnext,int jnextnext,double
thisBendingStiffnessFactor)
{
for(int xyz = 0;xyz <= 2;xyz ++)
{
double vectorComponentsA = x[inext][jnext][xyz] - x[i][j][xyz];
double vectorComponentsB = x[inextnext][jnextnext][xyz] - x[inext][jnext][xyz];
double thisForceComponent = thisBendingStiffnessFactor * (vectorComponentsA vectorComponentsB);
force[i][j][xyz] += thisForceComponent;
force[inext][jnext][xyz] -= 2.0 * thisForceComponent;
force[inextnext][jnextnext][xyz] += thisForceComponent;
}
}
void CalculateMotion(int i)
{
for(int j = 0;j <= n;j ++)
{
for(int xyz = 0;xyz <= 2;xyz ++)force[i][j][xyz] += supportFactor[i][j] *
(supportLocation[i][j][xyz] - x[i][j][xyz]);
for(int xyz = 0;xyz <= 2;xyz ++)
{
velocity[i][j][xyz] = CarryOver * velocity[i][j][xyz] + Factor * force[i][j][xyz] /
EAOverSlackLength;
x[i][j][xyz] = x[i][j][xyz] + velocity[i][j][xyz];
}
}
Initialise(i);
}
Page 7 of 10
AR40283
QUESTION 4
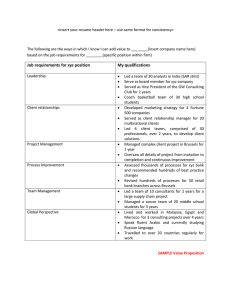
A beam-column system made of planar pantographic elements is shown in the figure
below. The pantographic structure is deployed using a single continuous active
cable (which runs over pulleys between pantographic elements and is indicated by
the dotted line in the figure). This is also used to prestress the passive cables
(indicated by the thin solid lines between pantographic elements). The motor which
winds in the cable is placed at the bottom of the right hand column element. The
pantographic structure is stabilised against lateral loads and out of plane loads using
cables fixed to the ground. In its fully deployed configuration the angle between
column pantographic pairs is 120o, and between beam pantographic pairs is 90o as
indicated in the figure.
a) Neglecting the bending resistance of the pantographic elements themselves
and:
i.
ii.
treating the horizontal pantograph as a beam, calculate the maximum
bending moment due to the indicated ULS applied loading.
[1 mark]
treating the vertical pantographs as columns, calculate the maximum axial
load and bending moment (due to the eccentricity of the applied load from
the beam) that they experience.
[3 marks]
b) Calculate the active cable force required to ensure prestress is maintained in
the passive cables of the beam pantograph.
[6 marks]
c) Calculate the active cable force required to ensure prestress is maintained in
the passive cables of the column pantographs.
[8 marks]
d) Assuming 20% loss in prestressing force in the active cable (due to friction in
the pulleys) at the centre of the beam, and 40% loss at the bottom of the left
hand column, calculate what the prestress force needs to be in the active
cable at the location of the motor at the bottom of the right hand column.
[6 marks]
e) Assuming an additional prestress of 20% of that calculated in part e), for
safety, calculate:
i.
the maximum tensile force in the passive cables.
[3 marks]
ii.
the maximum compressive force in the diagonal pantographic element at the
base of the left hand column.
[6 1 3 marks]
ULS loading = 2kN/m
Diagonal bracing
to provide lateral
stability
90o
120o
2m
2.5m
Motor to wind and prestress the active
deployment cable
Page 8 of 10
AR40283
Differential geometry
Subscripts and superscripts have the values 1 or 2. An index repeated as a subscript and
superscript is assumed to be summed from 1 to 2.
Scalar and vector products
u ⋅ v = u x v x + u y v y + u z vz
(
)
u × v = u y vz − u z v y i
(
)
+ ( u z v x − u x vz ) j + u x v y − u y v x k
∂ gi
∂2r
bij = n ⋅ j = n ⋅ i j
∂θ
∂θ ∂θ
∂n
∂n
= −g i ⋅ j = −g j ⋅ i
∂θ
∂θ
∂g
Γ ijk = g k ⋅ ij
∂θ
Base vectors
Christoffel symbols
∂r
∂θ i
gij = g i ⋅ g j
∂g
∂g ⎞
1⎛∂g
Γ ijm = ⎜ imj + jmi − mij ⎟
2 ⎝ ∂θ
∂θ
∂θ ⎠
gi =
g = g11g22 − g12
g i × g j = εijn
Γ ijk = g km Γ ijm
2
Γ ijj =
ε11 = 0 , ε22 = 0 , ε12 = −ε 21 = g
gi ⋅ g = δ i
j
=
j
n⋅gj = 0
g jm ⎛ ∂ gim ∂ g jm ∂ gij ⎞
+
−
2 ⎜⎝ ∂θ j
∂θ i ∂θ m ⎟⎠
g jm ∂ g jm
1 ∂ g
=
i
2 ∂θ
g ∂θ i
g ij = g i ⋅ g j
Tensor product of vectors
a ⋅ ( bc ) = ( cb ) ⋅ a = ( a ⋅ b ) c
For a general tensor,
ij
gkm Aijk = A..m
g km A.ki. .j = Aimj
Page 9 of 10
AR40283
Mean Curvature
ij
im jn
bii g bij ε ε gmnbij
=
=
2
2
2
g b − 2g12b12 + g11b22
= 22 11
2g
H=
(
Gaussian Curvature
(
1 i j
bi b j − bij b ij
2
1
b b −b 2
= ε ij ε mnbimb nj = 11 22 12 2
2
g11g22 − g12
K = b11b22 − b12b21 =
dθ i
gi
is tangent to the curve and its
du
rate of change with u is
∂ g dθ i dθ j
d 2θ i
q = ij
+ gi
∂θ du du
du 2
dθ i dθ j
d 2θ i
= Γ ijk g k + bij n
+ gi
du du
du 2
⎛ d 2θ k dθ i dθ j k ⎞
=⎜
+
Γ ij ⎟ g k
du du
⎝ du 2
⎠
)
Gauss–Codazzi–Mainardi equations
∂ 2 gi
∂ 2 gi
=
∂θ j ∂θ k ∂θ k ∂θ j
∂ Γ ijm
∂g
=
g m + Γ ijm mk
k
∂θ
∂θ
∂b
∂n
+ ijk n + bij k
∂θ
∂θ
⎛ ∂ Γm
⎞
m
= ⎜ ijk + Γ ijn Γ nk
− bij bkm ⎟ g m
⎝ ∂θ
⎠
⎛ ∂b
⎞
+ ⎜ ijk + bmk Γ ijm ⎟ n
⎝ ∂θ
⎠
Gauss's theorema egregium:
b ij bkm − bki b jm
⎛ ∂ Γ msj ∂ Γ msk
⎞
n m
n
m
=g ⎜ k −
+
Γ
Γ
−
Γ
Γ
sj nk
sk nj ⎟
∂θ j
⎝ ∂θ
⎠
is
)
dθ i dθ j
bij n
du du
dθ m dθ n
The vector
( gmn g s − gsm g n ) is
du du
+
perpendicular to the tangent.
The component of q lying in the plane
of the surface perpendicular to the
tangent is
⎛ d 2θ k dθ i dθ j k ⎞ dθ m dθ n
⎜⎝ du 2 + du du Γ ij ⎟⎠ du du ( gmn gks − gsm gkn )
If this vector is zero, the curve is a
geodesic, that is it appears straight
when viewed directly normal to the
surface. A geodesic is also the shortest
distance between two points on the
surface.
Minimal Surface
A minimal (or soap film) surface
minimizes the surface area through a
given boundary. The mean curvature,
H = 0.
⎛ ∂ Γ 2 ∂ Γ 2s 2
⎞
K = g1s ⎜ s1
−
+ Γ ns1Γ 2n2 − Γ ns 2 Γ 2n1 ⎟
2
1
∂θ
⎝ ∂θ
⎠
Membrane equilibrium equations
⎛ ∂ Γ1 ∂ Γ1s1
⎞
= g 2 s ⎜ s12 −
+ Γ ns 2 Γ1n1 − Γ ns1Γ1n2 ⎟
2
∂θ
⎝ ∂θ
⎠
Codazzi–Mainardi equations:
applied to the surface. The state of
membrane stress is defined by the
∂ bij
− bmj Γ ikm − bim Γ mjk
k
∂θ
∂b
= ikj − bmk Γ ijm − bim Γ mjk
∂θ
∇ k bij = ∇ j bik
∇ denotes the covariant derivative.
p = p ig i + pn is the load per unit area
surface tensor, τ = τ g i g j .
ij
The equations of static equilibrium are:
τ ij bij + p = 0
∂τ ij
+ τ kj Γ iki + τ ik Γ kij + p j = 0
∂θ i
τ ij = τ ji
∇iτ ij + p j =
Geodesics
A line on a surface is specified by
θ i = θ i ( u ) where u is a parameter.
CJKW/APD
Page 10 of 10
AR40283