as a PDF
advertisement

16th IMEKO TC4 Symposium
Exploring New Frontiers of Instrumentation and Methods for Electrical and Electronic Measurements
Sept. 22-24, 2008, Florence, Italy
Conversion from geometrical to electrical model of LVDT
Cleonilson Protásio de Souza1, Michel Bruno Wanderley 2
1
Federal Center of Technological Education of Maranhão-Brazil (CEFET-MA)
Av. Getúlio Vargas, 04 Monte Castelo – São Luís-MA, Brazil, 65030-000, protasio@cefet-ma.br
2
Research Grant supported by Research Support Foundation of Maranhão-Brazil (FAPEMA),
Av.Beira-Mar, 342, Centro – São Luís-MA, Brazil, 65010-070, mbwander@gmail.com
Abstract- The Linear Variable Differential Transformer (LVDT) is an inductive sensor which is used
to measure linear displacement and finds uses in modern machine-tool, robotics, avionics, and
computerized manufacturing. Its basic structure consists of a primary coil and two secondary coils like
an electrical transformer. However, LVDT has a movable magnetic core that when the primary coil is
excited with an AC voltage source, induced secondary voltages vary with the displacement of the core.
In general, this accurate and reliable displacement-to-electrical sensor can be modeled in two forms:
geometrical-parameter-based model and electrical-parameter-based model. Both are very used.
However, research results based in geometrical-based model may become useless when only
parameters from electrical one are known. In this paper, it is shown a way of conversion from
geometrical- to electrical-based model in order to allow the interaction from one to other.
I. Introduction
The Linear Variable Transformer Differential (LVDT) is used to measure linear displacement or
position. LVDT can be used in several applications as: automobiles’ suspension [1], seismic shocks
measurement [2], orthodontia [3], femoral prosthesis in medicine [4], deformations in concrete frames
in civil engineering [5], position system of robotic arms [6], besides other physical measurements.
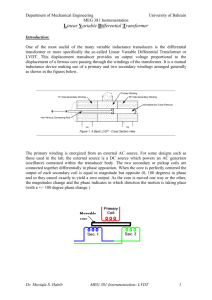
The basic structure of LVDT consists of a primary coil and two secondary coils like an electrical
transformer. However, LVDT has a movable magnetic core that when is dislocated it varies the mutual
inductances among secondary coils and the primary coil. In operation, it is applied an AC voltage, in
the primary coil, as is shown in Figure 1. The secondary coils are connected in series with opposing
phase, so when the magnetic core is exactly at the physical center between them, then the output
voltage, , is zero, as the net output is the difference between the two secondary voltages,
. If the core is moved from the center, it is obtained an output voltage that is proportional to the core
displacement, because there is a misbalance of magnetic flux intensities among the primary coil and the
secondary coils and one secondary coil receives more flux than the other. This misbalance produces
non-zero output voltage proportional to the core displacement [7].
On the other hand, mathematical models are very important tools for engineering and for previous
developments. For LVDT, the determination of a model and the estimation of its parameters is an
important way to develop new applications using this sensor. Also, when it is commercialized there is a
dependence of the manufacturer with regard to the calibration and the precision of the sensor.
Figure 1. LVDT: (a) Internal Schematic. (b) Internal Model.
16th IMEKO TC4 Symposium
Exploring New Frontiers of Instrumentation and Methods for Electrical and Electronic Measurements
Sept. 22-24, 2008, Florence, Italy
In general, LVDT is modeled in two ways: electrical-parameter-based model (EP) or geometricalparameter-based model (GP). EP model uses electrical parameters as resistances and inductances, and
GP model uses geometrical parameters based on physical dimensions of the LVDT. It is noticed that,
some scientific works use EP model and others used GP ones. Thus, research results based in a certain
model can become useless when only parameters from another model are known.
To consider the results of a model having parameters from other model, it is necessary to have tools to
permute its parameters. In this way, it is presented a way of conversion from GP model to EP model in
order to allow the interaction between this models and use results from one to other.
II. Electrical-Parameter-Based Model of LVDT
From Figure 2, an EP model of the LVDT can be obtained as follows, considering the following
parameters. : total resistance of the primary coil,
and Rs2: resistances of the secondary coils, LP:
self-inductance of the primary, Ls1 and Ls2: self inductances of the secondary, and M1 and M2: mutual
inductances between primary coil and the secondary coils [8] [9] [10]. Considering Rs as the total
resistance of the secondary circuit, it is obtained Rs = Rs1 + Rs2 + RL where RL is a load resistance not
showing. The induced voltage in the primary coil is given by:
E i = R p I p + sL p I p + sM 1 I s − sM 2 I s
where M1, M2 are dependent of the core displacement and
in the secondary circuit is given by:
(1)
, the excitation voltage. The net equation
0 = sM 1 I p − sM 2 I p + I s R s + sLs1 I s + sLs2 I s
(2)
Figure 2. LVDT Electrical Schematic.
From (1), it is obtained
Ip s =
E i − sM 1 I s + sM 2 I s
R p + sL p
(3)
Ip s =
− I s R s + sLs1 + sLs2
s M1 −M2
(4)
and from (2)
Comparing (3) and (4) and after some algebraic manipulations, it is obtained
Is s =
s M1 −M2 Ei
s 2 X + sY + R p R s
(5)
where
X = L p Ls1 + Ls2 − M 1 − M 2
2
(6)
Y = L1 R s + R p Ls1 + Ls2
(7)
Eo s = I s s RL
(8)
The output voltage, Eo, is given by
16th IM
MEKO TC4 Sym
mposium
Explooring New Frontieers of Instrumenttation and Methodds for Electrical and
a Electronic Measurements
Sept. 22-24, 2008, Floorence, Italy
Repllacing (5) in (8), it is obtainned
Eo
s M − M 2 RL
= 2 1
E i s X + sY + R p R s
(9)
Thiss is a second-oorder system which
w
indicatees that the phaase angle varies from +90º in low frequeencies
to –990º in high freequencies. Whhen the core is in the physiccal center, M2 = M1, and acccording to (9
9), EO
= 0, as is expectedd.
III. Geeometrical-Paarameter-Bassed Model off LVDT
A geeneral structuure that shows the geometrrical parametters (GP) of LVDT
L
is shoown in Figuree 3(a)
wherre: h1 is the primary
p
coil leength; h2 is thhe secondary coil length; D is the externnal diameter of
o the
cylinnder formed by
b the coils; d is the corre diameter; t1 is the coree length that is inserted in
n the
secondary coil 1; t2 is the coree length that is
i inserted in the secondaryy coil 2; δ1 e δ2 are the airrgaps
amonng secondary coils and the core; and R iss the flux effective radius.
s1
(aa)
(b)
Figure 3.
3 (a) LVDT Geometrical
G
Schematic. (b) LVDT equivaalent magnetic circuit.
In [111], it was useed magnetic circuit
c
theory to develop a math
m
model thhat involves iinternal param
meters
like: numbers of coil
c turns, phyysical dimensiions of the coiils and materiaal permeabilitty of the core.. This
reseaarch has involved experim
mental proceedures using known LVD
DT dimensionns and comp
paring
obtained theoreticcal calculationn of output vooltage and meeasured values. Using these dimensions, it is
posssible to calculaate self-inducctances and mutual
m
inductan
nces between primary coil and the secon
ndary
coilss.
The equivalent magnetic
m
circcuit for an LVDT
L
is illusstrated in Figgure 3(b) whhere MMF is the
magnnetomotive foorce and G01, Gs1, Gm1, G02, Gs2, m2 are magnetic
m
conduuctances relatted to its respeective
magnnetic fluxes: φo1, φs1, φm1, φo2, φs2, φm2 where
w
φo1 is th
he main flux which
w
goes to secondary 1; φs1 is
the secondary
s
1 sideflux; φm1 is
i the main siddeflux which crosses the seecondary 1; φo2 is the main
n flux
whicch goes to seccondary 2; φs22 is the seconddary 2 sideflux
x; and φm2 is the main sideeflux which crrosses
the secondary
s
2.
Wheen δ1 or δ2 variies slightly duue to a core displacement, R varies, and if the displacem
ment is small,, then
G01 and G02 are not
n consideredd (because theey are depend
dent of δ and R). Also, thee flux φm doees not
crosss the secondarry coils and itt is not able too produce muttual inductancce. In this wayy, Gm1 and Gm2
m are
not considered
c
as well [11]. Soo, only Gs1 andd Gs2 are conssidered, whichh are the magnnetic conductaances
crosssed by the fluxx φs, and theyy can be calcullated, accordin
ng to [11], by
G s1 = h2 − δ 1 g = t 1 g
G s2 = h2 − δ 2 g = t 2 g
(10)
(11)
wherre g is the specific magnetic conduuctance between cylindriccal surfaces and is given
n by
[
2µ0 π/ln D/d [12].
16th IMEKO TC4 Symposium
Exploring New Frontiers of Instrumentation and Methods for Electrical and Electronic Measurements
Sept. 22-24, 2008, Florence, Italy
After compute the magnetic conductances, the self inductance of the primary coil LP is given by
L p = N p2G
(12)
where Np is the number of turns of the primary coil and G is the total magnetic conductance that is
given by
G = G s1 //G s2
(13)
The mutual inductances M1 and M2, crossed by the flux φm, among the primary coil and the secondary
coils, can be calculated by
M 1 = N p N s gt 12 / 4h1
(14)
M 2 = N p N s gt 22 / 4h2
(15)
where Ns is the number of turns of the secondary coils.
According to [10], E o = (M1 − M 2 )E i . So, replacing (12), (14) and (15) in it, then Eo is given by
Lp
E o N s gt 0 Δt
=
Ei
h2 N pG
(16)
IV. Geometrical- to Electrical-Parameter-Based Model Conversion
A relationship between electrical and geometrical parameters in a direct way is presented as follows.
Considering as ideal the resistances of primary and secondary coils, i.e. RP = RS = 0, in frequency
domain (replacing s by iw,), from (9) it is obtained
Eo
iΔMR L
=
Ei − w (ΔM2 + L pLS ) + iL pR L
(17)
where Ls = Ls1 + Ls2. The magnitude of (17) is given by
Eo
ΔMRL
=
2 2
2
2
4
Ei
(w (ΔM + 2ΔM2LpLs + Lp Ls ) + Lp R2L
(18)
ΔMR L
(19)
resulting in
Eo
=
Ei
Denoting Z =
wL p
2ΔM 2 L s
R 2L
ΔM
+
+
L
+
s
L2p
L2p
w2
4
ΔM 4 2ΔM 2L s
+
+ L s , it is obtained
L2p
L2p
Eo
=
Ei
ΔM
(20)
R 2L
1
Lpw
(
Z
+
)
R 2L
w2
and
Eo
=
Ei
ΔM
Lp
wZ
+1
R 2L
(21)
16th IMEKO TC4 Symposium
Exploring New Frontiers of Instrumentation and Methods for Electrical and Electronic Measurements
Sept. 22-24, 2008, Florence, Italy
In order to obtain a relation independent of the load resistance, it is done RL Æ ∞, then
wZ / R 2L + 1 → 1 , then
E o ΔM M 1 − M 2
=
=
Ei
Lp
Lp
(22)
Hence, replacing (12), (14) and (15) in (22), it is obtained
2
2
E o N p N s (t 1 − t 2 )
=
Ei
4h 2 L p
(23)
E o N s g (t 12 − t 22 )
=
Ei
4h 2N pG
(24)
As LP=NP2G, so
Due to the LVDT symmetrical structure: t1 = t0 + Δt e t2 = t0 – Δt, where t0 is the length of the magnetic
core inserted in the secondary coils, when the core is put at the LVDT center, and Δt is its
displacement. In this way, it is obtained
Eo
Nsg
=
[t 20 + 2t 0 Δt + Δt 2 − t 20 + 2t 0 Δt − Δt 2 ]
E i 4h 2 N p G
Eo
Nsg
N gt Δt
=
(4t 0 Δt ) = s 0
E i 4h 2 N p G
N p h 2G
which is the same as (16).
N gt
Denoting k = 2 0 , then
N 1 h 2G
Eo
= KΔt → E o = KE i Δt → E o = CΔt
Ei
(25)
where C = KEi and as Ei is considered constant, it shows the linearity of the transducer.
Considering at balance, Δt = 0, and knowing that M 1 = L p Ls1 and M 2 = L p Ls2 that comes from
theory of coupled magnetic circuits between primary coil and the secondary coils, it is obtained
M 12
= Ls1
Lp
(26)
M 22
= L s2
Lp
(27)
and
Replacing (12) and (14) in (26), it is obtained
2
⎛ N ⎞ g t 1 + t 2 t 13
L s1 = ⎜⎜ s ⎟⎟
16t 2
⎝ h2 ⎠
(28)
In the same way, replacing (12) and (15) in (27), it is obtained
L s2
⎛N
= ⎜⎜ s
⎝ h2
2
⎞ g t 1 + t 2 t 23
⎟⎟
16t 1
⎠
(29)
16th IMEKO TC4 Symposium
Exploring New Frontiers of Instrumentation and Methods for Electrical and Electronic Measurements
Sept. 22-24, 2008, Florence, Italy
V. Results
As a result, according to (12), (14), (15), (28) and (29), it is possible to compute the electrical
parameters from geometrical ones by using the conversion formulas given in Table 1.
Primary Inductance
Mutual Inductance 1
L p = N p2 G
M1 =
N
L s1
⎛N
= ⎜⎜ s
⎝ h2
M2 =
4h2
Secondary Inductance 1
2
Mutual Inductance 1
2
p N s gt 1
N p N s gt 22
4h2
Secondary Inductance 2
2
t 13
⎞ g t 1 +t 2
⎛ N ⎞ g t 1 + t 2 t 23
⎟⎟
L s2 = ⎜⎜ s ⎟⎟
16t 2
16t 1
⎠
⎝ h2 ⎠
Table 1. Conversion formulas from GP to EP.
Example: considering a real LVDT with geometrical parameters given by d = 3mm, D = 9mm, h1 = h2
= 4mm, t1 = t2 = 2mm (core in the initial position) e NP = NS = 1000. Calculating g = 2µ 0 π/ln D/d
and G, see Eq.13, it is computed the following electrical parameters
LP
7,1mH
M1
1,8mH
M2
1,8mH
LS1
0,2mH
LS2
0,2mH
VI. Conclusions
In this work was described the models based on electrical parameters (EP) and on geometrical
parameters of LVDT. It was presented a way of conversion from GP model to EP model in order to
allow the interaction between both models and use results from one to other. Using the conversion
formulas, research results based in a certain model can be used when only parameters from another
model are known.
References
[1] Rajamani, R.; Hedrick, J. Adaptive observers for active automotive suspension: theory and
experiment. IEEE Transactions on Control Systems Technology, 2(1):8693, march 1995.
[2] Salapaka, S. et al. A self compensated smart LVDT transducer. Proceeding of American Control
Conference, 3(8-10):19661971, May 2002.
[3] Bühler D, Oxland T. R., Nolte L. P. Design and evolution of a device for measuring threedimensional micromotions of a press-fit femoral stem prostheses. Medical Engineering Physics,
19(2):187{199, 1997.
[4] Delong, R.; Douglas, W. An artificial oral environment for testing dental materials. IEEE
Transactions on Biomedical Engineering, 38(4):339-345, April 1991.
[5] Ho, C.; Pam, H. Inelastic design of low-axially loaded high-strength reinforced concrete columns.
Journal of Engineering Structures, 25(8):10831096, 2003.
[6] Goswami, A. Q. A.; Peshkin, M. Identifying robot parameters using partial pose information.
Control Systems Magazine, 13(5):6(14), October 1993.
[7] Costa Junior, A. G. Medição de deslocamento utilizando um Transformador Diferencial Variável
Linear baseada em técnicas de estimação. Master Thesis from Federal University of Campina
Grande, Brazil, 2005.
[8] Doebelin, E. O. Measurement Systems: Application and Design. McGraw-Hill, New York, 4
edition, 1990.
[9] Antonelli, K. et al. Displacement Measurement, Linear and Angular. The Measurement,
Instrumentation and Sensors Handbook. CRC Press, Boca Raton, 1999.
[10] Pallas-Areny, R.; Webster, J. Sensors and Signal Conditioning. Wiley InterScience, New York,
2001.
[11] Tian, G. et al. Computational algorithms for Linear Variable Differential Transformers (LVDTs).
IEE Proceedings Science, Measurement & Technology, 144(4):189{192, July 1997.
[12] Neubert, H. K. P. Instrument Transducers. Oxford University, London, 1975.