Adept IO Blox
User’s Guide
Adept IO Blox
User’s Guide
P/N: 04638-000, Rev C
March 2013
5960 Inglewood Drive • Pleasanton, CA 94588 • USA • Phone 925.245.3400 • Fax 925.960.0452
Otto-Hahn-Strasse 23 • 44227 Dortmund • Germany • Phone 49.231.75.89.40 • Fax 49.231.75.89.450
Block 5000 Ang Mo Kio Avenue 5 • #05-12 Techplace II • Singapore 569870 • Phone +65.6755 2258 • Fax +65.6755 0598
The information contained herein is the property of Adept Technology, Inc., and shall not be reproduced in whole or in part without prior written approval of Adept Technology, Inc. The information herein is subject to change without notice and should not be construed as a commitment by
Adept Technology, Inc. This manual is periodically reviewed and revised.
Adept Technology, Inc., assumes no responsibility for any errors or omissions in this document.
Critical evaluation of this manual by the user is welcomed. Your comments assist us in preparation
of future documentation. Please email your comments to: techpubs@adept.com.
Copyright 2006, 2013 by Adept Technology, Inc. All rights reserved.
Adept, the Adept logo, the Adept Technology logo, AdeptVision, AIM, Blox, Bloxview, Fireblox,
Fireview, Meta Controls, MetaControls, Metawire, Soft Machines, and Visual Machines are
registered trademarks of Adept Technology, Inc.
Adept Cobra i600, Adept Cobra i800, Adept Cobra s350, Adept Cobra s600, Adept Cobra s800,
Adept Cobra s800 Inverted, Adept IO Blox, Adept Python, Adept Python Linear Modules, Adept
sDIO, Adept Servo Kit, Adept SmartController CX, Adept Viper, MB-10, MB-40R, MicroV+, sDAI,
SmartServo, and V+ are trademarks of Adept Technology, Inc.
Any trademarks from other companies used in this publication
are the property of those respective companies.
Printed in the United States of America
Table of Contents
1
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.1 Product Description. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.2 Dangers, Warnings, Cautions, and Notes in Manual . . . . . . . . . . . . . . . . . . . . . . 8
1.3 What to Do in an Emergency Situation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.4 Additional Safety Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Adept Robot Safety Guide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.5 How Can I Get Help? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Related Manuals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Adept Document Library . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2
Installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.1 Dimensions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2 General Installation on All Adept Robots . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Cable Options . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Python Modules Cables Options . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Address Switch Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Installing Multiple IO Blox Units . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Maximum Number of IO Blox Units per System . . . . . . . . . . . . . . . .
Mounting on a DIN Rail . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12
13
14
14
15
16
2.3 Installation on an Adept Cobra i600/i800 or s600/s800 System . . . . . . . . . . . . 17
Mechanical Mounting. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Cable Installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.4 Installation on an Adept Cobra s350 System . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Mechanical Mounting. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Cable Installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.5 Installation on an Adept Viper System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Mechanical Mounting. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Cable Installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.6 Installation on an Adept Python Modules System . . . . . . . . . . . . . . . . . . . . . . . 20
Cable Installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Connecting the IO Blox-to-IO Blox Cable . . . . . . . . . . . . . . . . . . . .
Connecting the Auxiliary Power Cable . . . . . . . . . . . . . . . . . . . . . .
Finishing Cable Installation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Mechanical Mounting. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Mounting onto an MB-10 Amp . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Mounting onto the End of an L18 Module . . . . . . . . . . . . . . . . . . . .
Mounting onto a Module T-Slot . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Mounting onto a Two-Axis System . . . . . . . . . . . . . . . . . . . . . . . . . .
Adept IO Blox User’s Guide, Rev C
21
21
21
22
23
23
24
25
26
5
Table of Contents
Mounting onto a Three-Axis System . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3
General Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.2 Connector and Switch Descriptions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.3 Connecting to Terminals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.4 Connecting Input Signals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Input Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Example Input Schematic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.5 Connecting Output Signals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Total Current Limitation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Output Specifications. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Example Output Schematic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.6 IO Blox LEDs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.7 Custom Length IO Blox Cables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4
Operation on V+-Based Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.1 Using the IO Blox with Adept Robots . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
IO Signal Numbers. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.2 Configuring Multiple Robot and Amp Systems . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4.3 Digital I/O Block Configuration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
IO Blox Inputs/Outputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
4.4 DC_SETUP Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Load and Run DC_SETUP.V2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
4.5 Using CONFIG_C to Configure I/O . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
5
Operation on MicroV+-Based Systems . . . . . . . . . . . . . . . . . . . . . . . . . 51
5.1 Using the IO Blox in a Cobra i600/i800 System . . . . . . . . . . . . . . . . . . . . . . . . . . 51
Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
IO Signal Numbers. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
6
Adept IO Blox User’s Guide, Rev C
Introduction
1.1
1
Product Description
The Adept IO Blox I/O expansion option is designed for adding digital input and output
capability to Adept products, including the Cobra i-Series and s-Series robots, Adept
Python Linear Modules, and Adept Viper robots. Each IO Blox unit offers 8 inputs and 8
outputs, all optically isolated. You can connect up to four IO Blox units per robot or MB-10
amp.
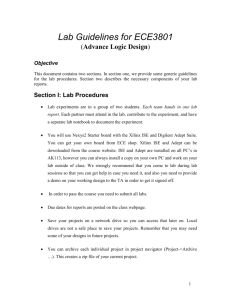
The IO Blox option uses clamp-style terminal strips for installing customer wiring. It can
be installed on a robot, or in a panel-mount environment on a DIN Rail. Several cable
options are offered for different installation situations.
Figure 1-1. Adept IO Blox Photo
Figure 1-2. Adept IO Blox Drawing
Adept IO Blox User’s Guide, Rev C
7
Chapter 1 - Introduction
1.2
Dangers, Warnings, Cautions, and Notes in Manual
There are six levels of special alert notation used in Adept manuals. In descending order
of importance, they are:
DANGER: This indicates an imminently hazardous
electrical situation which, if not avoided, will result in
death or serious injury.
DANGER: This indicates an imminently hazardous
situation which, if not avoided, will result in death or
serious injury.
WARNING: This indicates a potentially hazardous
electrical situation which, if not avoided, could result in
injury or major damage to the equipment.
WARNING: This indicates a potentially hazardous
situation which, if not avoided, could result in injury or
major damage to the equipment.
CAUTION: This indicates a situation which, if not avoided,
could result in damage to the equipment.
NOTE: Notes provide supplementary information, emphasize a point or
procedure, or give a tip for easier operation.
1.3
What to Do in an Emergency Situation
Press any E-Stop button (a red push-button on a yellow background/field) on the robot
being used, and then follow the internal procedures of your company or organization for
an emergency situation. If a fire occurs, use CO2 to extinguish the fire.
8
Adept IO Blox User’s Guide, Rev C
Additional Safety Information
1.4
Additional Safety Information
Adept provides other sources for more safety information:
Adept Robot Safety Guide
The Adept Robot Safety Guide provides detailed information on safety for Adept robots.
It also gives resources for more information on relevant standards.
It ships with each robot manual, and is also available from the Adept Document Library.
See “Adept Document Library” on page 10.
1.5
How Can I Get Help?
Refer to the How to Get Help Resource Guide (Adept P/N 00961-00700) for details on
getting assistance with your Adept software and hardware. Additionally, you can access
information sources on Adept’s corporate website:
http://www.adept.com
• For Contact information:
http://www.adept.com/contact/americas
• For Product Support information:
http://www.adept.com/support/service-and-support/main
• For user discussions, support, and programming examples:
http://www.adept.com/forum/
Related Manuals
This manual covers the installation and use of an Adept IO Blox I/O expansion option.
There are additional manuals that may be useful. See the following table. These manuals
are available in the Adept Document Library, on the software CD-ROM shipped with
each system. Also refer to the robot user guides for the robots you are using.
Table 1-1. Related Manuals
Manual Title
Description
Adept Robot Safety Guide
Contains safety information for Adept robots.
Adept SmartController
User’s Guide
Contains information on the installation and operation of the
Adept SmartController and the optional sDIO product.
Adept ACE User’s Guide
Instruction for the use of the Adept ACE software.
V+ Operating System User’s
Guide
Describes the V+ operating system, including disk file
operations, monitor commands, and monitor command
programs.
V+ Language User’s Guide
Describes the V+ language and programming of an Adept
control system.
Adept IO Blox User’s Guide, Rev C
9
Chapter 1 - Introduction
Adept Document Library
The Adept Document Library (ADL) contains documentation for Adept products. You
can access the ADL from:
• the Adept Software CD shipped with your system.
• the Adept website. Select Document Library from the Adept home page. To go
directly to the Adept Document Library, type the following URL into your
browser:
http://www.adept.com/Main/KE/DATA/adept_search.htm
To locate information on a specific topic, use the Document Library search engine on the
ADL main page. To view a list of available product documentation, select the Active
Documents option.
10
Adept IO Blox User’s Guide, Rev C
Installation
2.1
2
Dimensions
Tie-Wrap
Location
(1 of 4)
4.96
126
5.43
138
.18
4.5
4.47
113.6
1.72
43.8
1.77
45
Units are mm [in.]
Figure 2-1. Adept IO Blox Dimensions
Adept IO Blox User’s Guide, Rev C
11
Chapter 2 - Installation
2.2
General Installation on All Adept Robots
IO Blox installation varies for the different robots that support the option. This section
provides the installation instructions common to all types of robots.
See the sections listed below for information on connecting an IO Blox option to a specific
robot model.
• See Section 2.3 on page 17 for information on connecting to an Adept Cobra
i600/i800 or s600/s800 robot.
• See Section 2.4 on page 19 for information on connecting an Adept Cobra s350
robot.
• See Section 2.5 on page 20 for information on connecting to an Adept Viper robot.
• See Section 2.6 on page 20 for information on connecting to an Adept Python
Modules system or Adept MB-10 Servo Kit.
Cable Options
For most robot systems, the IO Blox unit is connected to the robot by the IO Blox-to-Robot
cable. See Table 2-1 for the optional cable part numbers by length.
Table 2-1. IO Blox-to-Robot Cable Options
Cable Name, Length
Part Number
IO Blox-to-robot, 0.3 M
04677-003
IO Blox-to-robot, 1.6 M
04677-016
IO Blox-to-robot, 3.0 M
04677-030
When you install more than one IO Blox unit in a system, they must be connected, or
daisy-chained, with the cables listed in Table 2-2.
12
Adept IO Blox User’s Guide, Rev C
General Installation on All Adept Robots
Table 2-2. IO Blox-to-IO Blox Cable Options
Cable Name, Length
Part Number
IO Blox-to-IO Blox, 0.3 M
04679-003
IO Blox-to-IO Blox, 1.1 M
04679-011
IO Blox-to-IO Blox, 1.4 M
04679-014
IO Blox-to-IO Blox, 1.8 M
04679-018
IO Blox-to-IO Blox, 2.2 M
04679-022
IO Blox-to-IO Blox, 2.6 M
04679-026
IO Blox-to-IO Blox, 3.0 M
04679-030
IO Blox-to-IO Blox, 3.5 M
04679-035
IO Blox-to-IO Blox, 4.0 M
04679-040
Python Modules Cables Options
For Python module systems, the IO Blox is connected to the MB-10 amp on a Python
module by the IO Blox-to IO Blox cable in the MB-10-to-IO Blox cable kit.
Table 2-3. MB-10-to-IO Blox Cable Kit Option
Cable Name, Length
Part Number
MB-10 -to-IO Blox Cable Kit, 0.3 M
05661-003
MB-10 -to-IO Blox Cable Kit, 1.1 M
05661-011
MB-10 -to-IO Blox Cable Kit, 1.4 M
05661-014
MB-10 -to-IO Blox Cable Kit, 1.8 M
05661-018
MB-10 -to-IO Blox Cable Kit, 2.2 M
05661-022
MB-10 -to-IO Blox Cable Kit, 2.6 M
05661-026
MB-10 -to-IO Blox Cable Kit, 3.0 M
05661-030
MB-10 -to-IO Blox Cable Kit, 3.5 M
05661-035
MB-10 -to-IO Blox Cable Kit, 4.0 M
05661-040
The IO Blox kit for Adept Python Modules and Adept Servo Kit systems includes a 24
VDC IO Blox Auxiliary Power cable. This cable can be used to provide 24 VDC power to
IO Blox. The part number for this cable is 05668-000. This cable can be trimmed from its
original 4 M length to the desired length.
Adept IO Blox User’s Guide, Rev C
13
Chapter 2 - Installation
Address Switch Settings
The address select switch must be set to the correct address for the system to function. The
default setting for a single IO Blox unit is for both switches 1 and 2 set to Off. When you
add multiple IO Blox units, each additional unit must be set to the correct address. See
Table 2-4.
Table 2-4. IO Blox Address Switch Settings
Switch 1
(A0 on PCB)
Switch 2
(A1 on PCB)
Address 0 - default, for 1st IO
Blox
Off
Off
Address 1 - for 2nd IO Blox
On
Off
Address 2 - for 3rd IO Blox
Off
On
Address 3 - for 4th IO Blox
On
On
Address Number
Installing Multiple IO Blox Units
When installing more than one IO Blox unit in a system, you must connect the units with
the supplied cables, and set the address select switch correctly for each additional unit.
1. Locate the IO Blox-to-IO Blox cable that was supplied with the system. See
Table 2-2 on page 13 for the details of the cable options.
2. Plug one end of the cable into the JCBL2 connector on the first unit.
3. Plug the other end of the cable into the JCBL1 connector on the second unit.
4. Continue this cabling process for any additional units.
5. Set the address select switch for additional units. See Table 2-4.
NOTE: Each IO Blox unit (up to 4) must have a unique address. IO Blox
units with duplicate addresses will conflict.
See also the note on page 37 for the maximum cumulative cable length between IO Blox
units.
14
Adept IO Blox User’s Guide, Rev C
General Installation on All Adept Robots
Figure 2-2. Four IO Blox Units Connected
NOTE: Python IO Blox kits include a 24 VDC power cable (not shown in
the above photo) that can be used to provide power to IO Blox units.
Maximum Number of IO Blox Units per System
There is a limit of 4 IO Blox units connected to any single IO Blox-based connector. These
connectors include:
• IO Blox connector on Cobra s600/s800
• IO Blox connector on Cobra i600/i800
• EXPIO connector on sDAI (Viper robot systems)
• EXPIO connector on MB-40R (Cobra s350 robot systems)
• IO Blox connector on an MB-10 amp1
In custom or “hybrid” systems with multiple mechanisms, the limit for IO Blox units is set
by the total system I/O of the SmartController, which is 480 inputs and 480 outputs,
inclusive of all I/O hardware (XDIO, XIO, sDIO, and DeviceNet). See the SmartController
and specific robot system manuals for more details.
1
In a multi-axis Python Linear Modules system (or MB-10 Servo Kit system), each MB-10
amp can have up to 4 IO Blox units connected. On preconfigured systems, Adept will
typically only mount the IO Blox units to the first and last MB-10 amps, due to
mechanical mounting limitations.
Adept IO Blox User’s Guide, Rev C
15
Chapter 2 - Installation
Mounting on a DIN Rail
The IO Blox can be mounted on a DIN rail using an optional foot element from Phoenix
Contact, p/n 2959434. Adept does not supply this foot element - you can order it from
Phoenix Contact or another electronic parts supplier.
1. Remove the bolt flanges from each end of the unit.
2. Remove one of the end caps by removing two Phillips head screws. See Figure
2-3.
3. Turn the unit over and slide in the DIN rail foot element.
4. Replace the endcap.
5. Snap the unit onto the DIN rail by slipping it into the grooves in the slider and
pressing down until it clicks and locks in place.
6. To remove the unit, pull on the red strap and lift the unit off.
Endcap Removed
DIN Rail Foot
Element Installed
Figure 2-3. DIN Rail Mounting
16
Adept IO Blox User’s Guide, Rev C
IO Blox Mounted on
DIN Rail
Installation on an Adept Cobra i600/i800 or s600/s800 System
2.3
Installation on an Adept Cobra i600/i800 or s600/s800
System
Mechanical Mounting
The IO Blox option can be mounted to the robot in two locations. See Figure 2-4 and
Figure 2-5. Up to four IO Blox units can be mounted on a robot. The user needs to make an
adapter plate to go between the external mounting holes on the robot and the bolt flanges
on the IO Blox.
Use your web browser to go to the Adept Download Center on the Adept website. Search
for Download ID 500009 and download this file. The file contains the drawings showing
mounting brackets for Cobra robots. The table below shows the drawing numbers for the
base and plate brackets required for mounting onto the robot’s outer link (Joint 2) cover
and inner link (Joint 1) cover.
Table 2-5. IO Blox Bracket Drawing Numbers
Mounting on Outer Link (Joint 2) Cover
Mounting on Inner Link (Joint 1) Cover
IO Blox #
Base Drawing
Number
Plate Drawing
Number
Base Drawing
Number
Plate Drawing
Number
1
04852-000
04853-000
04852-010
04853-010
2
04852-000
04853-020
--
--
3
04852-030
04853-030
--
--
4
04852-030
04853-040
--
--
Inner Link
External Mounting
Location
Outer Link
External Mounting
Location
Figure 2-4. External Mounting Locations on Robot
The IO Blox unit can also be mounted on a DIN rail - see “Mounting on a DIN Rail” on
page 16.
Adept IO Blox User’s Guide, Rev C
17
Chapter 2 - Installation
Figure 2-5. Installation on Inner Link
Cable Installation
1. Locate the IO Blox-to-Robot cable supplied with the system.
2. Connect the end of the cable with the matching D-sub connector to the IO Blox
connector on the robot. See Figure 2-5.
3. Connect the other end of the cable to the JCBL1 connector on the IO Blox. See
Figure 3-1 on page 29 for the location of the JCBL1 connector.
NOTE: To install multiple IO Blox units, see “Installing Multiple IO Blox
Units” on page 14.
18
Adept IO Blox User’s Guide, Rev C
Installation on an Adept Cobra s350 System
2.4
Installation on an Adept Cobra s350 System
Mechanical Mounting
For Adept Cobra s350 robots, the IO Blox unit can be mounted on a DIN rail - see
“Mounting on a DIN Rail” on page 16.
Cable Installation
1. Locate the IO Blox-to-Robot cable supplied with the system.
2. Connect the end of the cable with the matching D-sub connector to the EXPIO
connector on the MB-40R.
MB-40R
To EXPIO
on MB-40R
IO Blox Option
Adept Cobra s350 System
(robot not shown)
Figure 2-6. IO Blox Cable Connection to Cobra s350 Robot System
3. Connect the other end of the cable to the JCBL1 connector on the unit. See Figure
3-1 on page 29 for the location of JCBL1.
NOTE: To install multiple IO Blox units, see “Installing Multiple IO Blox
Units” on page 14.
Adept IO Blox User’s Guide, Rev C
19
Chapter 2 - Installation
2.5
Installation on an Adept Viper System
Mechanical Mounting
For Adept Viper robots, the IO Blox unit can be mounted on a DIN rail - see “Mounting
on a DIN Rail” on page 16.
Cable Installation
1. Locate the IO Blox-to-Robot cable supplied with the system.
2. Connect the end of the cable with the matching D-sub connector to the EXPIO
connector on the sDAI module in the PA-4 power chassis.
Figure 2-7. IO Blox Cable Connection to sDAI Module
3. Connect the other end of the cable to the JCBL1 connector on the IO Blox unit. See
Figure 3-1 on page 29 for the location of JCBL1.
NOTE: To install multiple IO Blox units, see “Installing Multiple IO Blox
Units” on page 14.
2.6
Installation on an Adept Python Modules System
NOTE: When attaching an IO Blox unit to a Python module, make sure it
does not restrict joint motion or cause robot motion errors. T-slots and
threaded holes are provided on each module for the purpose of mounting
user equipment.
20
Adept IO Blox User’s Guide, Rev C
Installation on an Adept Python Modules System
Cable Installation
Up to four IO Blox units can be connected per MB-10 amp on Python systems. An IO Blox
unit can be connected to one MB-10 or two MB-10 amps on a multi-axis system. If
connecting to a three-axis or four-axis system, IO Blox can be connected to the first and
last MB-10 amps in the system.
Connecting the IO Blox-to-IO Blox Cable
1. Remove the T-bracket cover from the MB-10 amp.
2. Locate the IO Blox-to-IO Blox cable supplied with the system.
3. Connect one end of the cable to the IO Blox connector on the MB-10 amp. See
Figure 2-8.
To IO Blox Connector
on MB-10 anp and JCBL1
Connector on IO Blox
MB-10 Amp
IO Blox Device
24 VDC
Connectors
Note: MB-10 connectors
are located on bottom of
amp.
Adept Python
Linear Module
Figure 2-8. IO Blox Connector on MB-10 Amp
4. Route the other end of the cable through one of the openings on the sides of the
MB-10 T-bracket and connect it to the JCBL1 connector on the IO Blox unit.
Connecting the Auxiliary Power Cable
An IO Blox Auxiliary Power Cable is included in the IO Blox kit for Adept Python
Modules to provide 24 VDC user power to IO Blox. A male and female 2-pin plug are
attached to one end. One plug connects to the mating 2-pin plug on the 24 VDC cable from
the PDU or the 24 VDC cable connecting two MB-10 amps in a multi-axis system. If
connecting to the first MB-10 amp in a multi-axis system, the other 2-pin plug connects to
the 24 VDC cable connected to the next MB-10 amp in the system. The other end of the
Auxiliary Power Cable is unterminated and connects to the +V and G (Ground)
terminators on an IO Blox. See Figure 2-9. If necessary, cut the cable down to the desired
length.
1. Locate the IO Blox Auxiliary Power cable supplied with the IO Blox kit for Python
Linear Modules.
Adept IO Blox User’s Guide, Rev C
21
Chapter 2 - Installation
2. To connect to a single-axis system or the first MB-10 amp in a multi-axis system,
connect one of the 2-pin plugs on the IO Blox Auxiliary Power cable to the mating
2-pin plug on the 24 VDC power cable connected to the PDU.
To connect to the last MB-10 amp on a multi-axis system, connect one of the 2-pin
plugs on the IO Blox Auxiliary Power cable to the mating 2-pin plug on the 24
VDC cable connected to the preceding MB-10 amp in the system. See Figure 2-9.
3. If connecting to the first MB-10 amp in a multi-axis system, connect the other
2-pin plug on the IO Blox Auxiliary Power cable to the mating plug on the 24
VDC power cable connected to the next MB-10 amp in the system.
If connecting to a single-axis system or the last MB-10 amp in the system, tie-wrap
the unused 2-pin plug on the IO Blox Auxiliary Power cable.
PDU3
PDU3
24V
AMP
24VDC cable
from PDU3
AUX
CH1
CH2
ES1
ES2
AMP DC RESET
AUX DC RESET
XDCS
1
2
XSLV1/
XSLV2
AC
PWR
AMP
MB-10 #1
C B
I R
R E
C A
U K
I E
T R
MB-10 #2
MB-10 #3
AC
PWR
IN
2-Pin User
Plug
Unterminated cable
for User 24V Power
to +V terminal on
IO Blox. Cut to length
and strip wires.
Auxilliary
24V Power
Cable Assembly
(05668-000)
Figure 2-9. IO Blox Auxiliary Power Cable Connections
4. Route the unterminated end of the IO Blox Auxiliary Power cable through one of
the openings on the sides of the MB-10 amp.
5. Strip 7 mm of insulation from the unterminated end of the IO Blox Auxiliary
Power cable and connect the white 24 VDC power wire to the +V terminal on the
IO Blox; connect the black ground wire to the G terminal on the IO Blox. See
Figure 2.1 on page 11 for the location of the +V and G terminals. See Section 3.3
on page 30 for information on connecting to terminals.
Finishing Cable Installation
When finished installing the IO Blox cables, replace the T-bracket cover on the MB-10
amp.
22
Adept IO Blox User’s Guide, Rev C
Installation on an Adept Python Modules System
NOTE: To install multiple IO Blox units, see “Installing Multiple IO Blox
Units” on page 14.
Mechanical Mounting
IO Blox modules can be mounted onto Adept Python Modules systems in the following
ways:
• Onto the MB-10 T-bracket cover
• Onto the end cap of an L18 module
• Onto a module T-slot
• Onto a Z-axis harness enclosure
Use the M4x8 mounting screws included in the IO Blox mounting kit to mount the IO
Blox.
IO Blox can also be mounted on a DIN rail - see “Mounting on a DIN Rail” on page 16.
Mounting onto an MB-10 Amp
1. Position the IO Blox unit on the MB-10 T-bracket cover. Align the two mounting
holes on the sides of the unit with the corresponding two holes on the T-bracket
cover.
2. Secure the unit to the T-bracket cover with two M4x8 screws. See Figure 2-10.
IO Blox
Mounted
on MB-10
Amp T-Bracket
Cover
Figure 2-10. Mounting onto an MB-10 Amp
Adept IO Blox User’s Guide, Rev C
23
Chapter 2 - Installation
Mounting onto the End of an L18 Module
1. Position the IO Blox unit on the L18 module end cap; align the two mounting
holes on the sides of the unit with the corresponding two holes on the end cap.
2. Secure the unit to the T-bracket cover with two M4x8 screws. See Figure 2-11.
IO Blox
Mounted
on L-18
Module
Figure 2-11. Mounting onto an L18 Module
24
Adept IO Blox User’s Guide, Rev C
Installation on an Adept Python Modules System
Mounting onto a Module T-Slot
An IO Blox unit can be mounted using the T-slots on the modules. Use the M4 square nuts
(and M4x8 screws) included in the IO Blox mounting kit to mount onto a T-slot.
NOTE: Mount the unit close enough to the MB-10 amp to connect the
cables.
1. Insert two M4 square nuts (DIN 562) into one of the T-slots on the side of a
module. Insert the nuts near the end cap opposite to the motor.
2. Position the unit over the T-slot nuts; align the T-slot nuts with the two mounting
holes on the sides of the IO Blox unit.
3. Secure the unit with two M4x8 screws. See Figure 2-12.
IO Blox
Mounted
on Module
T-Slot
Figure 2-12. Mounting onto a Module T-Slot
Adept IO Blox User’s Guide, Rev C
25
Chapter 2 - Installation
Mounting onto a Two-Axis System
1. Mount an IO Blox unit to the T-bracket cover on the MB-10 amp. See “Mounting
onto an MB-10 Amp” on page 23 for information.
2. Optionally, mount another unit onto the T-bracket cover on the other MB-10 amp.
See Figure 2-13.
NOTE: Below is a typical two-axis Python system. Your configuration
may be different.
IO Blox
Devices
Mounted
on two MB-10
Amp T-Bracket
Covers
Figure 2-13. Mounting onto a Two-Axis System
26
Adept IO Blox User’s Guide, Rev C
Installation on an Adept Python Modules System
Mounting onto a Three-Axis System
1. To mount an IO Blox unit to the X-axis module, mount the unit to the T-bracket
cover on the X-axis MB-10 amp. See “Mounting onto an MB-10 Amp” on page 23
for information.
2. To mount the IO Blox to the Z-axis module, position the unit onto the enclosure
on the Z-axis module; align the two mounting holes on the sides of the IO Blox
unit with the corresponding two holes on the enclosure. Secure the unit with two
M4x8 screws. See Figure 2-14.
IO Blox
Mounted
on Last
MB-10 Amp
IO Blox
Mounted
on First
MB-10 Amp
Figure 2-14. Mounting onto a Three-Axis System
NOTE: Adept recommends mounting IO Blox units only on the first and
last MB-10 amps in a three-axis Python system.
Adept IO Blox User’s Guide, Rev C
27
General Operation
3.1
3
Introduction
This chapter describes the operation features common to use with all types of Adept
robots. The Adept Cobra i-Series robots run under the MicroV+ operating system, which
uses different signal numbers than the other robots that support the IO Blox option, which
all run under the V+ operating system.
After installing an IO Blox unit on any type of robot, perform the steps in this chapter. If
you have an Adept Cobra i600/i800 robot, refer to Chapter 5 for additional operation
information for your robot. For all other types of robots, refer to Chapter 4.
3.2
Connector and Switch Descriptions
JPC_COM
Status LED
8 Input
Terminals
Address
Select
Switch
JCBL1
JCBL2
Over Temp
LED
8 Output
Terminals
Figure 3-1. IO Blox Connectors
JPC_COM - 9-pin D-Sub connector for serial connection to a COM Port on a PC. (Only
supported on SmartAxis systems running MicroV+.)
Status LED - Green LED lights when logic power is present and blinks when
communicating.
Input Terminals - 8 input terminals for user input signals.
Output Terminals - 8 output terminals for user output signals.
Adept IO Blox User’s Guide, Rev C
29
Chapter 3 - General Operation
Over Temp LED - Red LED lights when the output driver experiences an
over-temperature fault, such as when an output is shorted. See Section 3.6 on page 36 for
more information.
JCBL1/2 - 8-pin connectors for connecting to host or to daisy-chain to another IO Blox
unit. These two connectors are interchangeable, either one can be used.
ADDR_ SEL Switch - DIP-switch used to select one of four addresses. See Table 2-4 on
page 14.
3.3
Connecting to Terminals
To connect wires from user-supplied devices to the terminals, see the following
procedure. The terminals are designed for wire sizes in the range of 14-24 AWG.
1. Strip 7 mm of insulation from the end of the wire that you want to connect to the
terminal.
2. Insert a small flat-blade screwdriver (2.5 mm) into the top opening on the
terminal. Push the blade in until the clamp in the lower opening folds back. See
Figure 3-2.
3. Insert the stripped end of the wire into the lower opening, then remove the
screwdriver from the top opening. The clamp will close on the wire. Pull on the
wire to confirm it is securely attached in the connector.
4. Visually inspect the connection to make sure that the clamp has closed on the
wire, not the insulation.
Insert small flat-blade
screwdriver to open
contact.
Insert wire, then
remove screwdriver to
close contact.
Figure 3-2. Inserting Wires into Terminals
30
Adept IO Blox User’s Guide, Rev C
Connecting Input Signals
3.4
Connecting Input Signals
The IO Blox unit has 16 optically isolated digital I/O channels (8 high-side driver outputs
with common source and 8 independent inputs). They are wired to terminal blocks
located on the unit. See Figure 2-1 on page 11. These terminal blocks also contain
internally wired jumpers to route ground and power signals, if desired.
NOTE: In V+ systems, the IO Blox inputs cannot be used for REACTI
programming, high-speed interrupts, or vision triggers. See the V+
Language User' s Guide for information on digital I/O programming.
Input Specifications
Table 3-1. IO Blox Input Specifications
Parameter
Value
Style
Two wire, individually optically
isolated, reversible current flow.
Operational voltage range
0 to 30 VDC
OFF state voltage range
0 to 3 VDC
ON state voltage range
10 to 30 VDC
Typical threshold voltage
Vin = 8 VDC
Operational current range
0 to 7.5 mA
OFF state current range
0 to 0.5 mA
ON state current range
2.5 to 7.5 mA
Typical threshold current
2.0 mA
Impedance (Vin/Iin)
3.9 k minimum
Current at Vin = +24 VDC
Iin 6 mA
Turn-on response time (hardware)
5 µsec maximum
Software scan rate/response time
16 ms scan cycle/
32 ms max. response time
Turn-off response time (hardware)
5 µsec maximum
Software scan rate/response time
16 ms scan cycle/
32 ms max. response time
NOTE: The input current specifications are provided for reference.
Voltage sources are typically used to drive the inputs.
NOTE: If using multiple power supplies, ground all the power supplies to
the same grounding point.
Adept IO Blox User’s Guide, Rev C
31
Chapter 3 - General Operation
Example Input Schematic
User-Supplied Equipment
Adept-Supplied Equipment
DIGITAL INPUTS
NPN
Sensor (Sink)
3.3K
I1 (UPR)
+V
3.9K
PS2805-4
Out
DI_1
I1 (LWR)
G
D
A (UPR)
PNP
Sensor (Source)
B (LWR)
+V
I2 (UPR)
3.9K
PS2805-4
3.9K
PS2805-4
3.9K
PS2805-4
3.9K
PS2805-4
3.9K
PS2805-4
3.9K
PS2805-4
3.9K
PS2805-4
I2 (LWR)
Out
G
I3 (UPR)
–
+12VDC
I3 (LWR)
+
A (UPR)
B (LWR)
Limit Switch Source
I4 (UPR)
I4 (LWR)
I5 (UPR)
I5 (LWR)
Limit Switch Sink
A (UPR)
B (LWR)
PLC 1 (Source)
12V
I6 (UPR)
I6 (LWR)
I7 (UPR)
PLC 2 (Sink)
I7 (LWR)
24V
A (UPR)
+24VDC
User
Supply
+
–
B (LWR)
I8 (UPR)
I8 (LWR)
Figure 3-3. Typical User Wiring for Input Signals
32
Adept IO Blox User’s Guide, Rev C
5VD
Connecting Output Signals
3.5
Connecting Output Signals
The eight digital outputs share a common, high-side (sourcing) driver IC. The driver is an
eight channel device designed to supply any kind of load with one side connected to
ground. It is designed for a range of user-provided voltages from 11 to 24 VDC, and each
channel is capable of up to 0.7 A of current. This driver has over-temperature protection,
current limiting, shorted load protection, and under-voltage shutdown. In the event of an
output short or other over-current situation, the affected output of the driver IC turns off
and back on automatically to reduce the temperature of the IC. The “OVRTMP” LED on
the IO Blox indicates this condition. The driver is powered by the user-provided voltage
supply and the driver control inputs are optically isolated from the IO Blox control logic.
NOTE: An IO Blox Auxiliary Power cable is provided in the IO Blox kit for
Adept Python Linear Modules to provide 24 VDC user power to IO Blox.
See Section 2.6 on page 20 for information.
The outputs are accessed through a 9 x 2 terminal block on the IO Blox unit. The upper
row of this terminal block starts with the “+V” supply input and continues with the eight
output pins. The bottom row of pins are all shorted together for ground connections. This
arrangement allows the two wires from the power supply to be connected at one end and
the two wire connections to each load to be connected at the appropriate output. When an
output is on, current will flow in through the power supply pin, out through the output
pins, and then return through the ground bus of the terminal block back through the
power supply connection. This type of output is considered sourcing, that is, in the ON
condition, current flows out of the output pin. See Figure 3-4 on page 35 for details on
typical digital output wiring.
Total Current Limitation
Although the capacity of a single channel is 0.7 A, the IO Blox cannot sustain 0.7 A on all
outputs simultaneously. Due to heat sinking constraints, the maximum current for all
outputs is 2.5 A in a 50° C environment and 3.7 A in 25° C.
Adept IO Blox User’s Guide, Rev C
33
Chapter 3 - General Operation
Output Specifications
Table 3-2. IO Blox Output Circuit Specifications
Parameter
Value
Power supply voltage range
11 VDC +V 30 VDC
Under voltage shutdown
7 VDC +V 10.5 VDC
Quiescent current (outputs off)
Iin 35 mA
Operational current range, per
channel (See “Total Current
Limitation” on page 33.)
Iout 700 mA
Total Current Limitation, all channels Iin, all on 2.5 A @ 50° C ambient on
Iin, all on 3.7 A @ 25° C ambient
Ron 0.200 @25C (Ron 0.320
On state resistance (Iout = 0.5 A)
max.)
Output leakage current
Iout 10 µA
Turn on response time
100 µsec. max., 50 µsec typical
(hardware only)
Turn off response time
150 µsec. max., 75 µsec typical
(hardware only)
Output voltage at inductive load
turnoff (Iout = 0.5 A, Load = 6 mH)
(+V - 60) Vdemag (+V - 47)
DC short circuit current limit
0.7A ILIM 1.9 A
Iovpk 4 A
Peak short circuit current
NOTE: If using multiple power supplies, ground all the power supplies to
the same grounding point.
34
Adept IO Blox User’s Guide, Rev C
Connecting Output Signals
Example Output Schematic
Adept-Supplied Equipment
User-Supplied Equipment
Iin
Typical Isolated
Output Control
(1 of 8)
+V
G
ST VN808 or equivalent
VCC
DO_1
+
–
Alarm
O2
VCC
CLAMP
I1
10K
+ User 24VDC
Power Supply
–
O1
G
UNDERVOLTAGE
DETECTION
Typical User
Supply and Loads
Lamp
G
GND
O3
I2
CLAMP POWER
I3
I4
CURRENT LIMITER
I5
LOGIC
I6
JUNCTION TEMP.
DETCTION
Same structure for all
channels
OUTPUT 1
Lamp
OUTPUT 2
G
OUTPUT 3
O4
OUTPUT 4
G
OUTPUT 6
O5
I8
OUTPUT 7
G
CASE TEMP.
DETCTION
–
OUTPUT 5
I7
Status
+
Load
+
Load
–
OUTPUT 8
O6
+
Load
G
c STMicroelectronics
O7
OVRTMP LED
G
–
AC Motors
M
L
N
O8
G
M
User AC
Power
Supply
Figure 3-4. Typical User Wiring for Output Signals
Adept IO Blox User’s Guide, Rev C
35
Chapter 3 - General Operation
3.6
IO Blox LEDs
There are two surface-mount style LEDs on the IO Blox: a green STATUS LED and a red
OVRTMP LED. See Table 3-3 for descriptions.
Table 3-3. IO Blox LED Condition Descriptions
Green STATUS LED
On steady = logic power on, no communication
On blinking = communication with host OK
Off = no logic power
Red OVRTMP LED
On = over-temperature condition in the output driver
IC. The OVRTMP LED is the only driver error
indication, there is no software feedback of this
condition.
Off = outputs OK
An OVRTMP indication is the result of an over-temperature or over-current condition on
one or more of the outputs, usually due to a short-circuit condition. As a result, the output
driver IC will oscillate on and off as the chip tries to drive the load. The LED will turn on
and off along with this temperature cycling characteristic.
The red OVRTMP LED is active only when:
• An output has been turned on by a V+ command and:
a. One or more activated outputs has a thermal overload problem, usually due
to a short in the user's wiring from the output pin to the user's ground.
OR
b. Total current drawn by all active outputs has exceeded the case temperature
rating over time. See the Total Current Limitation, all channels on entry in
Table 3-2 on page 34.
36
Adept IO Blox User’s Guide, Rev C
Custom Length IO Blox Cables
3.7
Custom Length IO Blox Cables
The cables that connect power and communications from the host to the IO Blox and
between IO Blox units can be ordered in a standard set of lengths. If there is a need for a
custom length cable, the following information describes the parts and method to build it.
Item 2 - 8X
Item 1
*Back
Item 3
Item 2 - 8X
Item 1
Item 4 - 2X 0.8"
*Back
P2
Pin 8
P1
2x 0.4"
1.0"
2X
Pin 4
Pin 1
Figure 3-5. IO Blox Cable Drawing
Table 3-4. IO Blox Cable Parts List
Item
Adept Part
Number
Description
Manufacturer Part Number
1
25146-50085
RCPT, 8POSN, MOLEX, MICRO
MOLEX INC. 43025-0800
2
25119-02010
Terminal, MOLEX, MICRO, 20-24
AWG
MOLEX INC. 43030-00009
3
26724-08130
CABLE, HIGH FLEX, 0.2mm2,(24
AWG) 4 PAIR (desired length)
DAIDEN RMFEV-SBX-S-A
0.2/4P, or
MONTROSE/CDT CBL
2794-4
Note to item 3.: The Manufacturer P/N’s are “high-flex” cables and may be difficult to
obtain. If so, and especially if the application does not involve repeated flexing of the cable,
a cable with 4 twisted pairs of 24 AWG to 20 AWG may be substituted.
4
27300-00033
TUB, SHRINK, ADH, 1/4IN, BLK
(desired length)
RAYCHEM CORP. TAT-125
1/4 BLK, or
REMTEK CORP. DWP-125
1/4 BLK4
NOTE: Use 20 AWG wire for cable lengths beyond 3 meters. Limit
individual cable lengths to 10 meters (using 20 AWG wire), and
cumulative total length (between all IO Blox units) to 30 meters.
Adept IO Blox User’s Guide, Rev C
37
Chapter 3 - General Operation
Table 3-5. IO Blox Cable Wire List
FROM
Loc.
TO:
Wire #
Loc.
Wire #
Color
Remarks
P1
1
P2
1
WHT (BLU)
GND (Twist w/ LINE 5)
P1
2
P2
2
BRN
SIO1+ (Twist w/LINE 3)
P1
3
P2
3
WHT(BRN)
SIO1- (Twist w/LINE 2)
P1
4
P2
4
GRY
TX232 (Twist w/LINE 8)
P1
5
P2
5
BLU
IO5VPWR (Twist w/LINE 1)
P1
6
P2
6
GRN
SIO2+ (Twist w/LINE 7)
P1
7
P2
7
WHT(GRN)
SIO2- (Twist w/LINE 6)
P1
8
P2
8
WHT(GRY)
RX232 (Twist w/LINE 4)
38
Adept IO Blox User’s Guide, Rev C
Operation on V+-Based
Systems
4.1
4
Using the IO Blox with Adept Robots
This chapter describes the operation of IO Blox units connected to robots that use the V+
operating system. These robots are:
• Adept Cobra s600/s800
• Adept Cobra s350
• Adept Viper
• Adept Python Linear Modules
Configuration
IO Blox units that are connected to the robot will be automatically recognized by the
system when the robot is turned on. You can connect (or disconnect) IO Blox units while
the system is turned on, but you must re-boot the system to update the system IO
configuration.
IO Signal Numbers
In a typical Adept robot system that runs under V+, IO signal numbers for the IO Blox are
pre-configured at the factory and are ready to use. See Table 4-1, “IO Blox Signal
Designations,” on page 42.
Adept IO Blox User’s Guide, Rev C
39
Chapter 4 - Operation on V+-Based Systems
Cobra s600/s800 Robot
IO Blox Device
IO Blox #1
8 Input signals: 1113 to 1120
8 Output signals: 0105 to 0112
1
GND
XSLV
2
SmartServo
+24V
DC INPUT
(24 VDC)
AC INPUT
(200-240 VAC 1Φ)
XIO
XPANEL
RS-232
Figure 4-1. IO Blox I/O Signals and Cable Connections on Adept Cobra s600/s800 Robot
MB-40R
To EXPIO
on MB-40R
IO Blox Device
IO Blox #1
8 Input signals: 1113 to 1120
8 Output signals: 0105 to 0112
Adept Cobra s350 System
(robot not shown)
Figure 4-2. IO Blox I/O Signals and Cable Connections on Adept Cobra s350 Robot System
40
Adept IO Blox User’s Guide, Rev C
Using the IO Blox with Adept Robots
IO Blox #1
8 Input signals: 1113 to 1120
8 Output signals: 0105 to 0112
To EXPIO
on sDAI
J AMP
J AMP
J AMP
s DAI
CAUTION
HIGH
VOLTAGE
INSIDE
DO NOT REMOVE OR INSTALL THIS
MODULE UNLESS HIGH VOLTS LED
IS COMPLETELY DISTINGUISHED
DO NOT REMOVE OR INSTALL THIS
MODULE UNLESS HIGH VOLTS LED
IS COMPLETELY DISTINGUISHED
DO NOT REMOVE OR INSTALL THIS
MODULE UNLESS HIGH VOLTS LED
IS COMPLETELY DISTINGUISHED
HIGH VOLTS ON
HIGH VOLTS ON
HIGH VOLTS ON
PWM ON
PWM ON
PWM ON
LOW VOLTS ON
LOW VOLTS ON
OPEN CKT FAULT
STATUS
LOW VOLTS ON
OPEN CKT FAULT
HV SAG/OVER TEMP FAULT
OPEN CKT FAULT
HV SAG/OVER TEMP FAULT
SHORT FAULT
HV SAG/OVER TEMP FAULT
SHORT FAULT
CH1 CH2
B
R
A
K
E
1
R
S
2
3
2
SmartServo
SHORT FAULT
CH1 CH2
2
CH1 CH2
A
M
P
L
I
F
I
E
R
A
M
P
L
I
F
I
E
R
A
M
P
L
I
F
I
E
R
C
O
N
T
R
O
L
C
O
N
T
R
O
L
C
O
N
T
R
O
L
E
X
P
I
O
X
S
L
V
CH1
CH2
CH1
CH2
CH1
M
O
T
O
R
M
O
T
O
R
M
O
T
O
R
P
O
W
E
R
P
O
W
E
R
P
O
W
E
R
O
U
T
P
U
T
O
U
T
P
U
T
O
U
T
P
U
T
IO Blox Device
C
N
P
G
4
5
6
C
N
P
G
1
2
3
CH2
C
N
2
5
C
N
2
9
Adept Viper System
(robot not shown)
adept
technology, inc.
Adept PA-4
Power Chassis
Figure 4-3. IO Blox I/O Signals and Cable Connections on Adept Viper Robot System
IO Blox #1
8 Input signals: 1113 to 1120
8 Output signals: 0105 to 0112
To IO Blox Connector
on MB-10
MB-10 Amp
IO Blox Device
Note: MB-10 connectors
are located on bottom of
amp.
Adept Python
Module
Figure 4-4. IO Blox I/O Signals and Signal Cable Connections on Python Module System
Adept IO Blox User’s Guide, Rev C
41
Chapter 4 - Operation on V+-Based Systems
Table 4-1. IO Blox Signal Designations
Terminal Designation
V+ Signal Number
IO Blox #1
4.2
Input 1
1113
Input 2
1114
Input 3
1115
Input 4
1116
Input 5
1117
Input 6
1118
Input 7
1119
Input 8
1120
Output 1
0105
Output 2
0106
Output 3
0107
Output 4
0108
Output 5
0109
Output 6
1110
Output 7
0111
Output 8
0112
IO Blox #2 - Inputs
1121 to 1128
IO Blox #2 - Outputs
0113 to 0120
IO Blox #3 - Inputs
1129 to 1136
IO Blox #3 - Outputs
0121 to 0128
IO Blox #4 - Inputs
1137 to 1144
IO Blox #4 - Outputs
0129 to 0136
Configuring Multiple Robot and Amp Systems
This section describes how to configure IO Blox units installed on multiple Adept robots
and multiple MB-10 amps on a Python Linear Modules system.
After installing IO Blox (see Chapter 2), use the DC_SETUP program to assign the correct
digital “logical” IO blocks to each robot. By default, robot #1 or MB-10 amp #1 uses block
1 and block 3; robot #2 or MB-10 amp #2 uses block 2 and block 4. See Figure 4-5 on page
44 and Figure 4-11 on page 49. See Section 4.4 on page 44 for information on using
DC_SETUP.
The default signal configuration, or mapping, is shown in Table 4-2. This configuration is
usually sufficient for most installations. If you need to change the mapping, see
Section 4.3 on page 43 and Section 4.5 on page 46.
42
Adept IO Blox User’s Guide, Rev C
Digital I/O Block Configuration
Table 4-2. Default Signal Configuration, Dual Robot/Multiple MB-10 Systems
Location
Robot #1 or
MB-10 #1
IO Blox 1
IO Blox 2
IO Blox 3
IO Blox 4
Robot #2 or
MB-10 #2
IO Blox 1
IO Blox 2
IO Blox 3
IO Blox 4
4.3
Type
Signal Range
Inputs
1113 - 1120
Outputs
0105 - 0112
Inputs
1121 - 1128
Outputs
0113 - 0120
Inputs
1129 - 1136
Outputs
0121 - 0128
Inputs
1137 - 1144
Outputs
0129 - 0136
Inputs
1161 - 1168
Outputs
0145 - 0152
Inputs
1169 - 1176
Outputs
0153 - 0160
Inputs
1177 - 1184
Outputs
0161 - 0168
Inputs
1185 - 1192
Outputs
0169 - 0176
Digital I/O Block Configuration
In most system installations you can use the default I/O configurations shown in the
previous section, and you will not have to modify the I/O configuration files. If you need
to modify the I/O configuration, then you must use the CONFIG_C program, as
described in Section 4.5 on page 46.
The information in this section can help during the configuration, or mapping process.
The diagram in Figure 4-5 shows the output and input blocks for IO Blox units on robot #1
or MB-10 #1 and robot #2 or MB-10 #2 in a dual robot or multiple MB-10 amp system.
IO Blox Inputs/Outputs
Up to four IO Blox units can be daisy-chained together per robot or MB-10 amp to give
you 32 inputs and 32 outputs per robot or amp. For IO Blox units installed on a a single
robot or MB-10 amp, by default, the IO Blox units occupy the first four bytes of the third
block. For IO Blox units installed on a second robot or MB-10 amp, by default, they
occupy the first four bytes of the fourth block. See Figure 4-5. See also your robot
documentation for additional I/O configuration information.
Adept IO Blox User’s Guide, Rev C
43
Chapter 4 - Operation on V+-Based Systems
ROBOT #1
or MB-10 #1
Input Block 3
Byte 1
Byte 2
Byte 3
Byte 4
IO Blox 1
IO Blox 2
IO Blox 3
IO Blox 4
(1113-1120)
(1121-1128)
(1129-1136)
(1137-1144)
Byte 3
Byte 4
Output Block 3
Byte 1
ROBOT #2
or MB-10 #2
Byte 2
IO Blox 1
IO Blox 2
IO Blox 3
IO Blox 4
(0105-112)
(0113-120)
(0121-128)
(0129-136)
Byte 2
Byte 3
Byte 4
Input Block 4
Byte 1
IO Blox 1
IO Blox 2
IO Blox 3
IO Blox 4
(1161-1168)
(1169-1176)
(1177-1184)
(1185-1192)
Byte 2
Byte 3
Byte 4
IO Blox 1
IO Blox 2
IO Blox 3
IO Blox 4
(0145-0152)
(0153-0160)
(0161-0168)
(0169-0176)
Output Block 4
Byte 1
Figure 4-5. Input/Output Block Configuration in Dual Robot /Multiple MB-10 Amp Systems
4.4
DC_SETUP Configuration
NOTE: The procedure below describes how to use the DC_SETUP
program to initialize IO Blox on MB-10 amps on a multi-axis Python
system.
Load and Run DC_SETUP.V2
This section goes through the IO Blox initialization. You map the IO Blox units to logical
blocks (see Figure 4-5 on page 44 for information on the default IO Blox logical blocks).
1. Type the following at the prompt.
load d:\util\dc_setup.v2
execute 1 a.dc_setup
The first screen in the Setup program looks similar to Figure 4-6.
44
Adept IO Blox User’s Guide, Rev C
DC_SETUP Configuration
2. Select “Configure DIO input/output blocks.”
Figure 4-6. DC_SETUP Program Main Screen
3. Press the SPACE bar to select the SmartServo device to which the IO Blox units
are connected. On multi-axis Python systems, when the LED on the MB-10 amp
you want to configure flashes green/red, press ENTER to select it. A screen
similar to Figure 4-7 is displayed.
Figure 4-7. DC_SETUP SmartServo Device Data Screen
4. Follow the on-screen prompts to map the units to the default logical block.
5. If IO Blox units are installed on a second MB-10 amp, repeat the above steps to
map the units installed on this amp to the next default logical block.
NOTE: On Adept Python Linear Modules systems, when an IO Blox is
correctly connected to the MB-10 amp and configured, “OK” is displayed
on the MB-10 amp’s status panel.
NOTE: Remember to save all specifications to the system disk when
prompted at the end of the setup process.
Adept IO Blox User’s Guide, Rev C
45
Chapter 4 - Operation on V+-Based Systems
4.5
Using CONFIG_C to Configure I/O
The default IO Blox signal configuration, or mapping, is shown in Table 4-2 on page 43.
This configuration is usually sufficient for most installations. If you need to add more I/O
or change the mapping, perform the steps below.
When changing the signal mapping, keep the following points in mind.
• By default, V+ allocates signal input/output signal ranges for four IO Blox units
per block even if less than four units are installed (see Table 4-2 on page 43).
• By default, V+ allocates certain input/output signal ranges to various other types
of I/O devices, such as optional sDIO modules. To avoid conflicts, do not map
signals for IO Blox I/O to signals used by other I/O devices. In general, specify
signal ranges above the default ranges used by other I/O devices. See Figure 4-11
on page 49 for the default signal input ranges for other I/O devices. See your robot
documentation for additional information.
• Map 8 available input signals and 8 available output signals per each IO Blox unit.
Also, map multiple, daisy-chained IO Blox units to consecutive input and output
signal numbers, respectively. For example, map input signals for the first unit to
1113-1120, input signals for the second unit to 1121-1128, and so on; map output
signals for the first unit to 0105-0112, output signals for the second unit to
0113-0120, and so on (these are the default signals).
NOTE: After using CONFIG_C to map I/O signals for IO Blox units, you
must run the DC_SETUP program to assign the correct digital I/O blocks.
See Section 4.4 on page 44.
This procedure provides the basic steps for using the CONFIG_C program to map I/O
signals.
1. Type the following at the prompt:
LOAD D:\UTIL\CONFIG_C
EXE 1 a.config_c
The following will be displayed.
46
Adept IO Blox User’s Guide, Rev C
Using CONFIG_C to Configure I/O
Figure 4-8. CONFIG_C Menu
2. Select option 2 “V+ System Configuration Data.”
The following will be displayed.
Figure 4-9. Controller Configuration Editor Menu
3. Select option 2 “EDIT system CONFIGURATION.”
The following will be displayed.
Adept IO Blox User’s Guide, Rev C
47
Chapter 4 - Operation on V+-Based Systems
Figure 4-10. System Configuration Editor Menu
4. Configure the I/O as shown in Figure 4-11 on page 49. This figure shows an
example from a CONFIG_C file - look closely at the highlighted areas. Do not
delete any of the default configurations. This file is configured for:
• Two sDIO modules connected to two robots
• XIO connected to two robots
• Up to four IO Blox units (per robot or MB-10 amp) connected to two robots
or two amps
48
Adept IO Blox User’s Guide, Rev C
Using CONFIG_C to Configure I/O
Figure 4-11. Sample Configuration File for Digital I/O
Adept IO Blox User’s Guide, Rev C
49
Operation on MicroV+-Based
Systems
5.1
5
Using the IO Blox in a Cobra i600/i800 System
Configuration
IO Blox units that are connected to the robot will be automatically recognized by the
system when the robot is turned on. You can connect (or disconnect) IO Blox units while
the system is turned on, but you must issue a SRV.RESET command to update the system
IO configuration.
Cobra i600/i800 Robot
IO Blox #1
8 Input signals: 1033 to 1040
8 Output signals: 0033 to 0040
IO Blox Device
1
GND
XSLV
2
SmartServo
+24V
DC INPUT
(24 VDC)
AC INPUT
(200-240 VAC 1Φ)
XIO
XPANEL
RS-232
Figure 5-1. IO Blox I/O Signals and Cable Connections on Cobra i-Series Robots
Adept IO Blox User’s Guide, Rev C
51
Chapter 5 - Operation on MicroV+-Based Systems
IO Signal Numbers
In a typical Cobra i600/i800 system, the MicroV+ IO signal numbers for the IO Blox units
are pre-configured at the factory and are ready to use. See Table 5-1.
Table 5-1. IO Blox Signal Designations
Terminal Designation
MicroV+ Signal Number
IO Blox #1
52
Input 1
1033
Input 2
1034
Input 3
1035
Input 4
1036
Input 5
1037
Input 6
1038
Input 7
1039
Input 8
1040
Output 1
0033
Output 2
0034
Output 3
0035
Output 4
0036
Output 5
0037
Output 6
0038
Output 7
0039
Output 8
0040
IO Blox #2 - Inputs
1041 to 1048
IO Blox #2 - Outputs
0041 to 0048
IO Blox #3 - Inputs
1049 to 1056
IO Blox #3 - Outputs
0049 to 0056
IO Blox #4 - Inputs
1057 to 1064
IO Blox #4 - Outputs
0057 to 0064
Adept IO Blox User’s Guide, Rev C
P/N: 04638-000, Rev C
5960 Inglewood Drive
Pleasanton, CA 94588
925•245•3400