A Stabilization of Frequency Oscillations in an
advertisement

2001
Int.J. Sc.Tech.,Vol.6,No.l, January-April
Thammasat
A Stabilizationof FrequencyOscillations
in an InterconnectedPowerSystemUsing
Static SynchronousSeriesCompensator
Issarachai Ngamroo
Electrical EngineeringProgram
Sirindhorn Intemational Institute of Technology
ThammasatUniversity, Pathumthani,12l2l, Thailand
E-mail: ngamroo@siit.tu.ac.th
Abstract
This paper proposes a new application of one of the sophisticatedFACTS (Flexible AC
Syslems)devices,i.e. Static SynchronousSeriesCompensator(SSSC)to stabilizethe
Transmissi,on
power system.The SSSClocatedin serieswith the tiefrequencyof oscillationsin an interconnected
lino betweenany interconnectedareas,is appticableto stabilizethe areafrequencyof oscillationsby
The mathematicalmodel of SSSCis
high-speedcontrol of tie-line powerthroughthe interconnections.
of SSSC is designedbasedon
The
controller
control.
power
flow
of
ae.ived from its characteristic
control schemeof SSSC
enhancingthe dampingof the inter-areaoscillationmode.The state-feedback
using thi techniques of overlapping decompositionsand discrete eigenvalue assignment is
developed.Simulationstudyexhibitsthe significanteffectsof the proposedcontrol'
systernatically
l. Introduction
Nowadays, electric power systems are
undergoing drastic deregulation. Under this
situation, any power system controls such as
frequencycontrol etc. will be servedas ancillary
services. Especially, in the case that many
IndependentPowerProducers(IPPs)which have
insufficient abilities of frequencycontrol, tend
to increase significantly. In addition, various
kinds of apparatuswith large capacity and fast
power consumption, such as a magnetic
levitation transportation, testing plants for
nuclear fusion, even an ordinary scale factory
increase
for
steel manufacturing etc,
concentrated
are
loads
these
When
significantly.
in a power system.they may causea serious
problemof systemfrequencyoscillations.Under
this situation, the conventional frequency
control, i.e. governorsystem,may no longer be
able to absorb the transient frequency
oscillations.Therefore, it is very important to
considerhow the transientfrequencyoscillations
shouldbe rapidlystabilized.
52
Recently, the concept of utilizing power
electronicsdevicesfor power systemcontrol has
been proposed as FACTS (Flexible AC
Transmission Systems) devices tl] Among
Static Series Synchronous
them, the
Compensator (SSSC) I2l has been highly
anticipatedto be an effectiveapparatuswith the
ability for dynamic control of power flow. This
sophisticatedcharacteristicof SSSC motivates
many applicationsin power systems[2]. In this
paper,a new applicationof SSSCto provide an
active control facility for stabilization of
frequency oscillations in an interconnected
power systemis proposed.An SSSC locatedin
series with the tie-line between any
areas,can be appliedto stabilize
interconnected
oscillations by high-speed
frequency
area
the
control of tie-line power through the
In addition,the study resultsin
interconnections.
this paperalso show that the high-speedcontrol
of SSSCcan be coordinatedwith the slow-speed
control of governor systemsfor enhancingthe
stabilization of area frequency oscillations
effectively.
Thammasat
Int.J. Sc.Tech.,Vol.6,No.l, January-April
2001
The organizationsof this paperare as follows. In
part 2. the motivation of the proposed control
are described.Part 3 focuseson'the design of
the effectsofthe
SSSCcontroller.Subsequently,
designedcontroller of SSSCare evaluatedby a
simulationstudy in part 4.
2. Motivation
Application
of
Proposed
3. Design of SSSC Controller
3.1 Mathematical Model of SSSC
SSSC
In this paper,the mathematicalmodel of SSSC
for the stabilizationof frequencyoscillationsis
derived from the characteristic of power flow
control of SSSC. As shown in Fig.l, by
controlling the output voltage of SSSC. Zro.,
the tie-line power flow can be directly
controlled. Because the SSSC fundamentally
controls only the reactive power, then the
injectedvoltageof SSSC, Z.ro. is perpendicular
to the line current 1, which can be expressedas
z . r s .=s ci t t * * ( i l t )
(l)
where i f I is a unit vector of line current.In Fig
l, the current 1 can be expressedas
i =(r,-t,- iv,,,,(ir))lix,
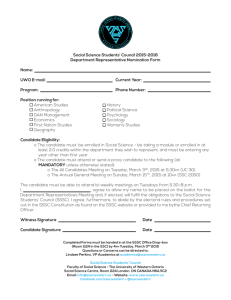
Figure l. An SSSC in
lnterconnectedSystem
a
Two
(2)
Area
A two area interconnected power system as
shown in Fig. I is usedto explainthe motivation
of a proposedcontrol. It is assumedthat a large
load with suddenchangethat has been installed
in the area l, causes a serious problem of
frequency oscillations.In addition, many IPPs
that have not sufficient abilities of frequency
control, have been concentratedin the area l.
These imply that the capabilitiesof frequency
control of govemors in the area I are not
enough.On the other hand, the area 2 has the
control capabilityenoughto sparefor serviceof
stabilizationoffrequency oscillationsin the area
1. Therefore,the area2 has installedan SSSCin
serieswith the tie-line betweenboth areas.In the
event of frequency fluctuation in an area 1, the
dynamic control of tie-line power by SSSC is
applied to stabilize the transient frequency
oscillations of area I by complementarily
utilizing the control capabilityof area2.
where X, is the reactanceof tie-line, V, and t,
are the voltagesat buses I and 2, respectively.
The active power and reactive power flow
through bus ( are
\r+ jQ,, =V,i
(3)
*here i is a conjugateof .f . Substituting(2)
into (3) yields
p,,+
je, = (4ttr1x,)st44-.a,1-v*"(rqif
x,tl
to'
+ i((v:I x,)-(1v,v,
1x )co,1a,-U,)i
where 4=4et6'and tr=Vreio'. In (4), the
second term of the right hand side V,i it
4r+ jQ,r(see (3)). Accordingly,the relationin
the real part of(4) gives
- d,) - (Pt,I X J)V,,,. (5)
4, = (4V,1X,)sin(d,
The secondterm of right hand side is the active
power controlledby SSSC.Here, it is assumed
that V, and V, are constantand the initial value
of V,"",is zero, i.e. V*uo= 0 . By linearizing(5)
aboutan operatingpoint,
53
ThammasatInt. J. Sc. Tech.,Vol.6, No.1, January-April2001
\
V,Vrcos(6ro-t
AD
_-:?9r(A4-^4)
N
n _ __ . ,
At
-
p
'"0
(6)
LV".,...
X,In
where the subscript0 denotesthe value at the
operatingpoint.
SSSC
By varying the SSSCoutput voltage A2,.,., the
power output of SSSC can be controlled as
(6)
Equation
AP,.*.= (P,.olX,Io)LY,,,".
Mf.4
therefore,implies that the SSSC is capableof
controlling the active power independently.ln
by the power
this paper,the SSSCis represented
effect
of active
where
the
control
flow controller
power by SSSCis expressedby 14,,. insteadof
ZOH : Zero Order Hold
eliminated. The SSSC is modeled as a
proportionalcontrollerof activepower.It should
be noted that the power flow control acting
positively on an area reacts negatively on
anotherareain an interconnectedsystem.Power
output of SSSC (4P",".), therefore,flows into
both areas with different signs (+, -),
simultaneously.This characteridticrepresents
the physical meaning of (7). Here, the time
constant 4",. of proportional controller is set
(l)
where
- 4.XA4- A4)
=(v,v,
M.r,,
lx, )cos(4,
= r r , ( L4-^4 )
(8 )
and 7,, is a synchronizingpower coefficient.
3.2 Coordinated
Governor
Control
of
System 2
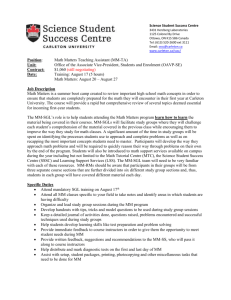
Figure 2. Linearized Model of Two Area
Systemwithout Governor for Design of Digital
Controllerof SSSC
(P', I X J o) LV,""". As a result, (6) can be
expressedas
LP,, = LP,t, - 4P..,,.
I
M,,,
appropriatelyat 0.03 [sec].To simplify a control
design, the state equation of system in Fig.2
where the time constant 1,,,. is ignored,can be
expressedas
SSSC and
The SSSC is superior to the conventional
frequencycontrol system,i.e. governor,in terms
of a high-speed performance.Based on this
different speed performance, a coordinated
control of SSSC and governor is explainedas
follows. When some sudden load disturbances
occur in an area,SSSCquickly startsthe control
to suppressthe peakvalue oftransientfrequency
governor
deviation.
Subsequently, the
responsiblyeliminatesthe steady state error of
the frequency deviation. In addition, there is
another advantagein consideringthe different
speedperformance,that is the dynamic of the
governorcan be neglectedin the control design
of SSSCfor simplicity.
lar I
t . '
l-atu, _ u M , r l [ 4 ]
-2nT,, M^,
0
t t
S:lAP
-1. = l 2 n 'T' i "
| '.''t |
IU,] L O
ll
I
,1,tM,-4lM,lLO6I
,n,
* ll-tl''l
o l**
l'1,lM,l
" ". The
Note that (9) is referred to as system S
variablesand parametersin Fig.2 are definedas
follows. Lft, Lf, are frequency deviations
power deviation. Mr,, is a tie-line power
deviation betweenareas 1 and 2 in case of no
SSSC. A,q, is a tie-line power deviationin case
of with SSSC.M,, M, are inertia constantsof
areas 1 and 2. D, D, are damping coefficients
3.3 Control Designof SSSC
The linearized model of a two area
system[3] includingthe dynamic
interconnected
of SSSC is delineated in Fig. 2 where the
dynamicsof governorsystemsin both areasare
of areas I and 2. A,, is an area capacity ratio
betweenareasI and 2.
54
ThammasatInt. J. Sc. Tech.,Vol.6, No.1, January-April2001
Here, the control scheme for power output
deviation of SSSC (Mrrr.) is designedby the
eigenvalue assignment method, so that the
dynamical aspect of the inter-areaoscillation
mode between areas 1 and 2 is specified.This
mode can be explicitly represented after
applyingthe variabletransformation[4]
Y = WX
t
l
Latt
0
o,,-1.
0 o n
or:]
(12)
[ 4 ,]
*l','I
M.r.rr.,
(10)
l u "I
L4,l
p
[ lr,l
l o r l l -dB q o ] or,l
(l l)
o l l or,l* z,
I ty,l=l
| 1AP.,.'.'.
Lv,) Lo,l
L o r ,Il o o 2 ] L
The transformedcoefficientmatrix of )' in (l l)
consistsof two diagonal blocks with complex
eigenvalues
at jB and real eigenvalue)".The
complex eigenvaluesphysically correspondto
the inter-area oscillation mode. The real
eigenvalue correspondsto the system inertia
centermode.From the physicalviewed point, it
shouldbe noticedthat the SSSClocatedbetween
two areas is effective to stabilize the inter-area
mode only, then the input term of (11)
correspondingto Ay, is zero. This meansthat
the SSSCis uncontrollablefor the systeminertia
centermode.In this paper,it is expectedthat the
governor systems are responsible for
suppressingthe frequencydeviation due to the
inertia mode. Therefore,the controllerof SSSC
is designedbasedon the idea of stabilizingthe
inter-area mode by the discrete eigenvalue
assignment
method[5].
In order to extract the subsystemwhere the
inter-areaoscillation mode betweenareas I and
2 is preserved, from the system (9), the
techniqueof overlappingdecompositions
[6] is
applied.First, the statevariablesof the original
system S are classified into three groups, i.e.
xz=[lrr,r]
r
lo,,
where, W is a transformationmatrix, )' is the
transformed state vector, X is the state vector
in (9). As a result, the transformedsystemcan
be expressedas
r, =[Al] ,
I o,, dtz
o" r
0
s , l 1 ' l = ldzz
o0 a' 'n azz lll lzz" II
Lz,)
t
. The
where z, =lxi . xj and z, =lx|,, xj
I
_l
element au,Q,i =1,2,3) correspondsto each
element in the coefficient matrix in (9). The
system S in 1tZ; can be decomposedinto two
interconnected
overlappingsubsystems,
(lr'^, a.")
t-r,,'l )
S ,, a = l l " ' ' l r , *l , " l M * " 1
l'"'l
I
[Lq' %,)
L.',
'
* [o "*'f,.
")'
(131
lo
The state variable x, i.e. the tie-line power
deviation between both areas, is repeatedly
included in both subsystems,which implies "
Overlapping Decompositions " .
For
system
stabilization, consider
two
interconnectedsubsystems ,S, and S, . Th.
termsin the right handsidesof (13) and (14) can
be separatedinto the decoupledsubsystems(as
in (13) and (14) and
indicatedin the parenthesis
the interconnectionsubsystems.As mentioned
in [6], if each decoupled subsystemcan be
stabilized by its own input, the asymptotic
stability of the interconnected overlapping
subsystemsS, and ,5, are maintained,moreover
and x,=llfll.
According to the process of overlapping
decompositions,the system S can be expanded
AS
the asymptoticstabilityof the original system S
is also guaranteed. Consequently, the
interactionswith the interconnectionsubsystems
in (13) and (14) are regardedas perturbations
and are neglectedduring control design. The
decoupledsubsystemsof ,Sr and ,5, can be
expressedas
55
2001
Int.J. Sc.Tech.,Vol.6,No.l, January-April
Thammasat
discrete feedback scheme of M.r.r.r. can be
expressedas
= -kot,Lf, - kor,,,LPrr,
APss.rc
(22)
As depicted in Fig.2, the feedbacksignals A/
and APr,, are sampledwith the samplingperiod
I which is set appropriatelyat 0.5 [sec]. The
power output deviation of SSSC AP.r.ro is
obtainedthrough the Zero Order Hold (ZOH).
In (15) and (16), there is a control input Mrrr.
appearing only subsystem Sr,.
Here, the
decoupled subsystem S, is regarded as the
designedsystem,which can be expressedas
t| u
-'
-l
| =
4. Control Design and Evaluation Effects
-tlM,ll
l-Dlu,
' ll M l
I
I
o llMr,,l .-.
lzrr,,
(t7)
I
t
r
M
,
l
.
^
+ | " l^1_,.
L o l
Itp,,,)
In this paper, a two area interconnectedsystem
(400 MW : 2,000 MW) with reheat steam
turbine [3] is used to design and evaluatethe
effectsof SSSCcontroller.The linearizedmodel
based on the load-frequency control (LFC)
is
includingthe dynamicsof turbines-governors
delineated
in Fig.3.
It can be verified that the eigenvaluesof ( I 7) are
a! jB, i.e. the inter-areaoscillationmode in
(9). It should be noticed that by virtue of
overlapping decompositions, the physical
characteristicof the original system S is still
preservedafter the processofmodel reduction.
Here,the control purposeof SSSCis to dampen
the peak value of frequencydeviation after the
suddenload disturbance.Since the system(17)
is the second-order oscillatory system, the
percent overshoot M t, is available for the
Note that, since the time constants of an
automatic voltage regulator (AVR), an
excitation system, field and the damper
windings of the generatorare much smallerthan
those of turbines-governorsin LFC loop, their
transientresponses
decaymuch fasterand do not
affect the LFC loop [7]. Consequently,the
dynamicsof thesecomponentsare not included
in the linearizedpower systemmodel.
control specification[5]. When the value of Mn
is given,the damping ratio ( is calculatedby
The resultsof SSSCcontrollerdesignare given
in tablel.
M,=exp(-(nl'll-E'l
(18)
Table 1. Control Design Results
Next, to assign the new eigenvalues
a,""x jf,",,, the new imaginarypart (8,"",) is
specified ai B . Thus, the undampednatural
Design Steps
frequencyat,canbe determinedby
^
l l .
1. Inter-AreaMode(17)
a
(1 e )
o,= P,""l,lt-1-
As a result, the new real part dn"* can be
Mp =l0Vo
3. New Eigenvalues
/rz=-0.651/0.88
in S-Plane
4.
(20)
= ((D,
1,., -- -_9.021j0.88
2. DesignSpecification
calculatedby
dr"r,
Numerical Results
New Eigenvalues
lrz=0.65tj031
in Z-Plane
The new eigenvalue in
transformedto Z-planeby
z=e"T =eeariq)T
S-plane can
be
5.
DiscreteState
Feedback Scheme
(2r)
where T
is the sampling period. By
representing(17) in a discreteform [5], the
56
lo^n,o*,,)
= [-0.2,-0.+]
Thammasatldt. J. Sc. Tech.,Vol.6, No.l, January-April2001
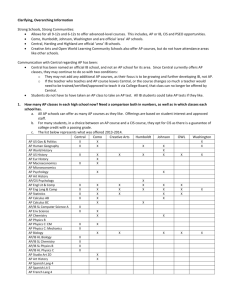
Figure 3. Digital Controllerof SSSCin a LinearizedModel of Two Area Systemincluding Governor
"[l
-o.o2f
F
I -o.o4
o.o3
'
t'{-
'/
-o.,
\
f; -o.lz
---._1._
.' \
]
'-'r
c -o.r6f
-O.O2 |
^
\
\-
& -o.rof
::
:
,:
=
ls
il
Time
l
;
l
-o,o3|
-o.o4 l
u -o.os
I
(
< -o.raoL-.--
I
|
of:
.E -o.orl- I
\ / ,Nosssc
-i-
,i
l-
$ o.orI
-,
- r ,-
o.o2
_
wi.h sssc
\
o.ori
.5!
.E -o-oaI
A
^.
.i
-\
,
-o-oeL o
2s
20
Time
[secl
Is€cl
Figure 5. Frequency Deviation of Area I
(With Governors)
Figure 4. FrequencyDeviation of Area 1 (No
Governors)
o.o3
I.
o.o2 |
-
O - O l'
E
'i
ot
0+r
,l
-
-rf
-o.ot
. -o.o2
l:
-o.o3 I
d
-o.o4 r
{
with sssc
--
No SSSC
t
a
q
a
-o.o6
o
"iii'
O
-o.o. r
5
ro
Time
i
i
)
_--
s
la
lsecl
Maximum
Deviotion
l0
Tim€
Power
:
O.OO7 [p.u.Mwl
15
20
lsecl
Figure 7. PowerOutput Deviationof SSSC
Figure 6. Frequency Deviation of Area
(With Governor)
57
Thammasat
Int. J. Sc.Tech.,Vol.6,No.1, January-April2001
In the area 1, in additionto a largeload with fast
change,the GenerationRate Constraint(GRC)
is also equippedwith the turbine of area I as
shown in Fig.3. The rate of change in turbine
power output with respectto time (d(LP,,)ld t )
i s r e s t r i c t e da s - 0 . 1 1 6 0
< d ( L P , , \ l d t< 0 . 1 1 6 0
[pu MW/sec]. As mentionedin [8], the turbine
equipped with
GRC experiences large
overshootof frequencyoscillationswith a long
settlingtime due to the inadequategenerationof
power during the occurrenceof abrupt load
change. This situation may emerge in a
deregulatedpower systemsucha casethat many
IPPs with insufficient frequency control
capabilitieshave been concentratedin the area
1. Here, it is assumedthat a 4 MW (0.01 [pu
MWI) step load occursin an area I at l: 1.0
[sec]. Figure 4 indicates that in case of no
governors,the frequencyoscillationswhich are
composedof the inter-areamode and the inertia
centermode are very large and undamped.After
applying an SSSC, the first overshoot of
frequency deviation is suppressedas expected
by the design specifications.At the sametime,
the oscillatorypart due to the inter-areamode is
also stabilized completely. Although, the
frequency deviation due to the influence of
inertia center mode continuously increases
becauseof the difference between generation
power and load power, the governors are
expectedto solve this problem. As shown in
Figs. 5 and 6, after the suppressionof peak
frequency deviations of both areas by SSSC,
governor systems continue to eliminate the
steady state error of frequency deviations
slowly, as expected. The requiredMW capacity
of SSSC is evaluatedfrom the peak value of
power output deviation of SSSC, (APr.rr.). As
depictedin Fig.7, the necessaryMW capacityof
SSSC is about 0.007 [pu MW], which is less
than the size of load chanse.
overlapping decompositions and discrete
eigenvalueassigirmentis presented.The digital
controller of SSSC is constructedby a simple
state-feedback scheme which is easy to
implement in practical power system.
Simulation study explicitly confirmed the
significant effectsof the proposedcontroller.
In this study, the dynamics of AVR loop,
excitation system, damper and field windings
are neglected in the power system model.
However, these componentsmay cause some
interactions with the high-speed control of
SSSC. This problem will be carefully
investigatedin the future study.
The proposedSSSCapplicationcan be expected
to be a new method of interconnectionof the
future AC power system against the HVDC
(High Voltage Direct Current) transmission
system.Moreover, it is also expectedto be a
new ancillary service for stabilization of
frequency oscillations in the next century of
deregulatedpower system.
6. References
[]
[2] Gyugyi, L., eI, al., Static Synchronous
SeriesCompensator:ASolid-State
Approach to The Series Compensationof
Transmission Line, IEEE Transactions on
Power Delivery,Vol.l2, No.l, pp. 406-41'1
,
t997.
t3] Trapathy,S.C., et, al., Adaptive Automatic
Generationwith Superconducting
Magnetic
Energy Storage in Power Systems ", IEEE
Transactions on Energy Conversion, Yol.
7, No.3, pp.434-441,
1992.
l4l
5. Conclusions
In this paper,a new applicationof Static Series
Synchronous Compensator (SSSC) to
stabilization of frequency oscillation in an
interconnectedpower system is proposed.The
interconnectionsbetween two areas are utilized
as the control channelsof tie-line power flow of
SSSC for frequency stabilization.The design
methodof digital controllervia the techniqueof
Hingorani,
N.G.,
Flexible
AC
TransmissionSystem, IEEE Spectrum,pp.
40-45,1993.
Portor, 8., et, al., Modal Control Theory
and Application , Taylor & Francis Ltd,
1972.
t5l Franklin, G. F., et al., Digilal Control of
Dynamic Systems 3rd edition, AddisonWesley,1998.
t6] Ikeda, M., et al., DecentralizedControl
with OverlappingInformationSets,Journal
of Optimization Theory and Applications,
V o l . 3 4 ,N o . 2 ,1 9 8 1 ,p p . 2 7 9 - 3 1 0 .
58
2001
Thammasat
Int.J. Sc.Tech.,Vol.6,No.l, January-April
7,, =7,, = 0.3
I7l Elgerd, O.L., Electric Energt Systems
2nd edition,
Theory, An Introduction
M c G r a w - h i l l1
, 985.
[sec]
- Turbine Time Constant
AGC
t8] Kothari, M. L., et al, Sampled-Data
of InterconnectedReheatThermal Systems
Considering Generation Rate Constraints,
IEEE Transactions on Power Apparatus
Vol.l00, No.5, pp.2334-2342,
and Systems,
1981.
T,,=T,r=Q'J
- Govemor Time Constant
Tr1=Trr=0.2
[sec]
- RegulationRatio
4 = R' =2'4
Appendix
[sec]
[HzlPu MW]
- Bias Coefficient
S v s t e m D a t a[ 3 ]
B,=Br- e.2
- Inertia constant
M, =0.2, Mz=0-167
- Inteeral controiler Gain
[P.u.MW.s/Hz]
K,,=K,r=0.4
- DampingCoefficient
D, = D, = 0.00833
[puMWHz]
[l/sec]
- SynchronizingPowerCoefficient
[Pu MW/Hz]
Ttz=0.02
- Turbine Gain
- Area Capacity Ratio
Kn = K,, = 0.333
A,,=0.2
- ReheatTurbine Time Constant
59
[Pu MWrad]