A parametric simulation method for discrete dislocation dynamics
advertisement

Eur. Phys. J. Special Topics 177, 177–191 (2009)
c EDP Sciences, Springer-Verlag 2009
DOI: 10.1140/epjst/e2009-01174-7
THE EUROPEAN
PHYSICAL JOURNAL
SPECIAL TOPICS
Regular Article
A parametric simulation method for discrete
dislocation dynamics
M. Beneš1,a , J. Kratochvı́l2,b , J. Křištan3,c , V. Minárik1,d , and P. Pauš3,e
1
2
3
Czech Technical University Prague, Faculty of Nuclear Sciences and Physical Engineering,
Czech Republic
Czech Technical University Prague, Faculty of Civil Engineering, Czech Republic
Charles University, Faculty of Mathematics and Physics, Czech Republic
Abstract. A new computer simulation method employed in discrete dislocation
dynamics is presented. The article summarizes results of an application of the
method to elementary interactions among glide dislocations and dipolar dislocation loops. The glide dislocations are represented by parametrically described
curves moving in glide planes whereas the dipolar loops are treated as rigid
objects. All mutual force interactions are considered in the models. As a consequence, the computational complexity rapidly increases with the number of objects considered. This difficulty is treated by advanced computational techniques
such as suitable accurate numerical methods and parallel implementation of the
algorithms. Therefore the method is able to simulate particular phenomena of
dislocation dynamics which occur in crystalline solids deformed by single slip:
generation of glide dislocations from the Frank-Read source, interaction of glide
dislocations with obstacles, their encounters in channels of the bands, sweeping
of dipolar loops by glide dislocations and a loop clustering.
1 Introduction
Discrete dislocation dynamics (DDD) became a highly efficient tool of exploration of plastic
deformation mechanisms at micro-scale. DDD is used at the same scale as the electron microscopy. While nearly all electron microscopy observations are carried out on specimens after
deformation, DDD can realistically simulate elementary deformation processes. However, despite a steady progress in DDD methods and ever increasing power of computational resources,
DDD is still far from a possibility to simulate complexity documented by electron micrographs.
Nevertheless, as demonstrated in this article, the current DDD is able to model some dislocation
mechanisms and early stages of dislocation pattering.
Plastic deformation in crystalline solids is carried by dislocations. Theoretical description
of dislocations is widely provided in literature such as [1,2]. The approach of this article
explores basic dynamic properties of dislocations and dipolar loops and nature of their mutual
interactions.
Dislocation is a line defect of the crystalline lattice. Along the dislocation curve the regularity
of the crystallographic arrangement of atoms is disturbed. The dislocation can be represented
a
b
c
d
e
e-mail:
e-mail:
e-mail:
e-mail:
e-mail:
michal.benes@fjfi.cvut.cz
kratochvil@fsv.cvut.cz
kristan@karlin.mff.cuni.cz
vojtech.minarik@fjfi.cvut.cz
petr.paus@fjfi.cvut.cz
178
The European Physical Journal Special Topics
by a curve closed inside the crystal (resulting into dipolar loops) or by a curve ending on surface
of the crystal. At low homologous temperatures the dislocations can move only along crystallographic planes (gliding planes) with the highest density of atoms. The motion results in mutual
slipping of neighboring parts of the crystal along the gliding planes. The slip displacement carried by a single dislocation, called the Burgers vector, is equal to one of the vectors connecting
the neighboring atoms.
A field given by displacement of atoms from their regular crystallographic positions in the
vicinity of a dislocation curve can be treated as the elastic stress and the strain fields. On the
other hand, a stress field exerts a force on a dislocation. The combination of these two effects
causes the elastic interaction between dislocations.
One of the most distinguished features of plastic deformation at the micro-scale is a great
overproduction of dislocations during a deformation process. Only a small fraction of generated
dislocations is needed to carry plastic deformation, the rest is stored in the crystal. The deformed crystals supersaturated with dislocations tend to decrease the internal energy by mutual
screening of their elastic fields. If dislocations possess a sufficient maneuverability provided by
easy cross-slip (solids with wavy slip) the leading mechanism is an individual screening. The
dislocations are stored in the form of dipoles which are transformed to prismatic dislocation
dipolar loops of the prevailing edge character or such loops are directly formed (the experimental evidence is summarized in [3]).
The glide dislocations (dislocation curves) and the dislocation loops (dipolar loops) have
much different characteristic length scales and mobile properties (see [4,5]):
– the segments of glide dislocations extend over distances of micrometers, whereas size of the
prismatic dipolar loops is of the order of 10 nm.
– glide dislocations are driven by the shear stress resolved in the slip plane, while loops are
drifted by stress gradients and/or swept by the glide dislocations. Prismatic loops can move
along the direction parallel to the direction of their Burgers vector only.
– during deformation glide dislocations become curved. Local curvature of the glide dislocations seems to be one of leading factors controlling the pattering (see [6,7]). On the other
hand, loops can be approximately treated as rigid objects.
The discrete dislocation dynamics first treated dislocations as long parallel straight lines. Later
more physical but considerably more complex three-dimensional situations of plastic deformation processes were investigated. Application of this approach addressed a variety of meso-scale
plasticity problems. Details can be found e.g. in [8–14].
Methods treating dynamics of curved dislocations can be divided into the following groups.
Some methods consider discrete segments of the curve moving over a discrete grid imitating
crystalline lattice on a larger scale (see [8,11]). Other methods discretize the curve into piecewise
linear (see [14,15]) or piecewise polynomially represented segments (see [12,13]).
Due to the above mentioned complexity, formation of dislocation structures as a consequence
of interactions between dislocations is still an open problem. The aim of this contribution is to
present detailed description of the parametric model treating several dislocation curves and a
dipolar loops and to present simulation results obtained by this model. In the following section
the parametric method is presented. Treatment of topological changes is described in Section 3,
Section 4 contains analysis of interaction of a single dislocation with dipolar loops and Section
5 deals with interaction of two dislocations in a PSB channel. Additional section provides basic
ideas on discretization employed for the curve evolution equation.
2 Parametric approach
Discrete dislocation dynamics is devoted to the study of interactions between one or more
dislocation curves and several other defects such as dipolar loops. The mentioned objects are
located in a 3D domain with finite volume. At low-temperature, glide dislocations can be
represented as smooth planar curves. As described in earlier results such as [8,12,14,16] and in
references therein, motion of the dislocation curve Γ can be described by the evolution law
BvΓ = −T κΓ + F,
(1)
Advances in the Multi-Scale Computational Design of Condensed Matter Interfaces
179
relating its normal velocity vΓ to the curvature κΓ and sum F of forces acting on Γ in the
normal direction. Here, B denotes the drag coefficient and T stands for the line tension.
In general, the law (1) can be treated by methods of the level-set type, of the phase-field
type or by the parametric approach (see [17,18]). The last approach is suitable for dislocation
dynamics as such material defects are represented by open curves. Self-intersections as well as
other topological changes can be incorporated to this approach in an algorithmic way.
For this purpose, we introduce notation for quantities related to this representation. A
planar curve Γ(t) evolving during the time interval 0, T can be described parametrically by a
smooth vector mapping X : 0, T × 0, 1 → R2 depending on time and on parameter u from
a fixed bounded interval 0, 1. Then, the curve is expressed as
Γ(t) = {X(t, u) = [X 1 (t, u), X 2 (t, u)] | u ∈ 0, 1}.
The unit tangential vector to the curve T is defined as T = ∂u X/|∂u X|. The unit normal vector
the curve N is perpendicular to the tangential vector in selected direction and is denoted as
N = ∂u X⊥ /|∂u X|. The Frenet formulae (see e.g. [19]) determine the curvature κΓ of Γ(t) from
the relation
∂ u X⊥
1
∂u T = −κΓ
.
|∂u X|
|∂u X|
Differentiating in the left-hand side yields
2
X
1
∂2 X
∂u X ∂u X · ∂uu
∂u T = uu 2 −
.
|∂u X|
|∂u X|
|∂u X| |∂u X|3
Condition of perpendicularity provides
κΓ = −
2
X ∂ u X⊥
∂uu
.
·
|∂u X|2 |∂u X|
Together with the expression for normal velocity
∂ u X⊥
,
vΓ = ∂t X ·
|∂u X|
the substitution into the motion law (1) suggests the equation for parametrization X = X(t, u)
in the form (in agreement with [18,20])
∂t X = T
2
X
∂uu
∂ u X⊥
,
+
F
|∂u X|2
|∂u X|
(2)
where the law (1) can be recovered by multiplying the vectorial equation (2) by the vector N.
This equation is accompanied either by the periodic boundary conditions
X(t, 0) = X(t, 1),
for closed dislocation curves (e.g. appearing in the Frank-Read source), or with fixed ends
X(t, 0) = Xfixed,0 , X(t, 1) = Xfixed,1 ,
for open dislocation curves. The initial condition for the curve position is prescribed as
X(0, u) = Xini (u).
Remark. According to [21,22], the law (1) can be also treated by the arc-length parametrization
which is a smooth vector mapping X = X(t, s) depending on time t ∈ (0, T ) and the arc length
s ∈ (0, L(t)) where L(t) is the length of the dislocation curve at a given time t. The mapping
satisfies the identity |∂s X(t, s)| = 1. Values of X(t, s) are in the glide plane. The motion law
(1) then has the form
2
X + F ∂ s X⊥ ,
(3)
B∂t X = T ∂ss
where ∂s X⊥ represents the normal vector to Γ(t), accordingly.
180
The European Physical Journal Special Topics
D
V1
V2
y
z
C
ν
x
A
D
y
C
x
l
Bl
h h
z
ν
A
B
l
l
h h
Fig. 1. Stable configurations V1 and V2 (and similarly I1 and I2 ) of dipolar loops positioned at
[x0 , y0 , z0 ].
The dislocation curves interact dynamically with other material defects such as dipolar loops
through the elastic force field. The interaction dynamics is studied in the coordinate system
shown in Fig. 1. The xz-plane represents the dislocation glide plane. The dipolar loops are
considered in their stable configurations - having long rectangular fixed shapes (see [14,16] and
references therein).
Therefore their motion can be fully described by motion of their barycenters, at the given
level of approximation. They are assumed to have longer edges parallel with the z-axis whereas
their shorter edges are parallel with either [1, 1, 0] or [1, −1, 0] vectors. This means that a dipolar
loop can move along the x-axis only, keeping the y- and z-coordinates constant. The Burgers
vector is set as b = [b, 0, 0].
As indicated above, each dipolar loop is assumed to have a rectangular shape and to have
one of the two stable configurations in the atomic lattice depending of the defect type-vacancy
(i.e. V1 , V2 ) and interstitial (i.e. I1 , I2 ) configurations. They are denoted according to Fig. 1. We
also assume that dipolar loops have the same size which is described
√by theaverage half-width
h, the average half-length l, and the average perimeter P = 2 2h 2 + 2l as can be seen in
Fig. 1. The position of a dipolar loop Λj , j = 1, . . . , N is given by the coordinates x(j) , y (j) , z (j)
of its barycenter. According to the previous assumptions, y (j) = const. = 0 and z (j) = const.,
whereas x(j) = x(j) (t) is given by the motion law
1 (j) dx(j)
=
Fx,total Γ, x(1) , . . . , x(N ) ,
dt
BP
(4)
(j)
where the term Fx,total is given by the force interaction with other dipolar loops and with the
dislocation curve Γ(t) described by the parametrization X. This interaction is projected to the
only possible direction of the loop motion – to the direction of the x-axis.
The interaction dynamics of dislocation curves Γ1 , . . . , ΓK parametrized by X(1) , . . . , X(K)
and dipolar loops Λ1 , . . . , ΛN discussed in this articleis therefore described by the following set
of equations endowed by the boundary and initial conditions
∂t X(l) = T
2
X(l)
∂uu
∂u X(l)⊥
+ F (t, X(1) , . . . , X(M) , Λ1 , . . . , ΛN )
, l = 1, . . . , K,
(l)
2
|∂u X |
|∂u X(l) |
X(l) (t, 0) = X(l) fixed,0 ,
X(l) (t, 1) = X(l) fixed,1 , l = 1, . . . , K,
(5)
(6)
Advances in the Multi-Scale Computational Design of Condensed Matter Interfaces
181
X(l) (0, u) = X(l) ini (u), l = 1, . . . , K
(7)
dx(j)
1 (j) (1)
=
Fx,total X , . . . , X(K) , x(1) , . . . , x(N ) ,
dt
BP
(8)
(j)
x(j) (0) = xini , j = 1, . . . , N.
(9)
3 Single-dislocation dynamics – shape and topology
Following to (5–9), the motion of a dislocation is described as
∂t X = T
2
X
∂uu
+ F (t, X)
|∂u X|2
∂ u X⊥
, X(t, 0) = Xfixed,0 ,
|∂u X|
X(0, u) = Xini (u),
X(t, 1) = Xfixed,1 ,
(10)
where the term F (t, X) covers external forces acting on the curve.
The Eq. (11) exhibits a natural redistribution property along the tangential direction which
can be explored for short-term computations with constant or slightly variable forcing term F
(see [18,23,24]). However, in case of a dislocation in the external highly variable force field, the
points at Γ(t) accumulate in some parts of the curve and elongate each from other in other
parts, in long term. A more powerful redistribution method is then needed.
For this purpose, the algorithm for curvature adjusted tangential velocity is used
(see [24,25]). This algorithm moves points along the curve in order to achieve a uniform
distribution of a selected quantity such as distance between points of discretization, or
curvature distribution (i.e., areas with higher curvature contain more points than areas with
lower curvature). This helps to improve numerical stability and accuracy of numerical solution
of the problem (11) which is modified as follows
B∂t X = T
2
∂ u X⊥
X
∂uu
∂u X
+
F
(t,
X)
,
−
α(X)
|∂u X|2
|∂u X|
|∂u X|
where the term α is based on the evaluation of relative local length between points. Details are
described in [20,24]
Topological changes. In the curve dynamics in general, and in the dislocation dynamics in
particular, topological changes may occur (e.g., connecting or splitting, closing of open curves,
etc.). The parametric approach does not handle them intrinsically. Therefore an additional
algorithm is needed allowing for such changes for discretized curves. The algorithm repeatedly
verifies whether the curve approaches its other parts or parts of another curve. In case of
approaching more than a defined tolerance, two separate curves are created and reparametrized.
The originally common points are in parts of very high curvature which move quickly away each
from other. For detailed information about the algorithm, see [20]. Application of the algorithm
is shown in Figs. 2 and 3.
Consequences for dislocation dynamics. Dislocations can interact with other
defects through the stress field. In this case, dislocation curve can be blocked by a potential
barrier. Figure 2 illustrates the evolution of a dislocation curve around an obstacle in material
(a precipitate). In the example, the obstacle has a form of circle located at [0,1] with a radius
of 0.1. Due to external force, the dislocation curve expands but the obstacle blocks the evolution. The curve surrounds it. At a certain time, it touches itself and splits into two curves, an
open curve and a closed curve. Closed curve cannot evolve anymore because of the obstacle.
Open curve continues expansion. The simulation was performed with the following parameters.
The number of discretization points is M = 200, the external force applied to the dislocation
182
The European Physical Journal Special Topics
3
3
2.5
2.5
2
2
1.5
1.5
1
1
0.5
0.5
0
0
-0.5
-0.5
-1
-1
-2
-1
0
1
2
-2
-1
t = 0.24
3
2.5
2.5
2
2
1.5
1.5
1
1
0.5
0.5
0
0
-0.5
-0.5
-1
-1
0
1
2
1
2
t = 1.05
3
-2
0
1
2
-1
t = 1.15
-2
-1
0
t = 1.2
Fig. 2. Evolution through a strong obstacle, FO = 20.0, FD = −5.0, t ∈ (0, 1.2), curve discretized by
M = 200 nodes.
FD = −5.0, the force of the obstacle FO = 20.0, the time of simulation t ∈ (0, 1.2). The initial
condition was given as a half-circle with a radius of 0.5 located at [0,0].
The example in Fig. 3 shows the simulation of the Frank-Read mechanism (see [1,2]) which
describes how new dislocation loops are created. An external force FD = −2.5 is applied to the
dislocation line forcing the curve to expand until it touches itself. At this moment, the curve
splits into two parts, i.e., dipolar loop and dislocation line. The loop continues in expansion.
The dislocation line will again undergo the same process. The initial condition was given as a
half-circle with a radius of 1.0 located at [0,0]. Parameters of the simulation are t ∈ (0, 2.9),
M = 200.
4 Single dislocation and several dipolar loops
Equations of motion. According to (5–9), the interaction dynamics of a single dislocation
curve Γ and several dipolar loops Λ1 , . . . , ΛN is described by the following set of equations
Advances in the Multi-Scale Computational Design of Condensed Matter Interfaces
8
8
6
6
4
4
2
2
0
0
-2
-2
-4
-4
-6
-4
-2
0
2
4
6
-6
-4
-2
t = 2.4
8
6
6
4
4
2
2
0
0
-2
-2
-4
-4
-4
-2
0
2
4
6
4
6
t = 2.5
8
-6
0
183
2
4
6
-6
t = 2.6
-4
-2
0
2
t = 2.9
Fig. 3. Frank-Read source, FD = −2.5, t ∈ (0, 2.9), curve discretized by M = 200 nodes.
endowed by the boundary and initial conditions
∂t X = T
2
X
∂uu
∂u X
∂ u X⊥
+ F (t, X, Λ1 , . . . , ΛN )
,
− α(X)
2
|∂u X|
|∂u X|
|∂u X|
X(t, 0) = Xfixed,0 ,
X(0, u) = Xini (u),
(11)
(j)
dx
dt
X(t, 1) = Xfixed,1 ,
=
1 (j)
X, x(1) , . . . , x(N ) ,
F
BP x,total
(j)
x(j) (0) = xini ,
j = 1, . . . , N.
The method of asymptotically uniform redistribution of nodes described in [24] determines the
function α(X) and guarantees accurate and stable behavior of the numerical solution of (11).
Basics of the numerical scheme are described in Section 6.
184
The European Physical Journal Special Topics
Evaluation of interaction terms. In the following, the evaluation of the terms
F = F (t, X, Λ1 , . . . , ΛN ),
(j)
(j)
Fx,total = Fx,total Γ, x(1) , . . . , x(N ) ,
is described.
Driving term for the dislocation curve in Eq. (5) is composed of external forces, plastic
relaxation and interaction with dipolar loops as follows
t
F = bσappl − µb
N
∂t X(τ ) ·
0
∂u X⊥
(j)
(τ )dτ +
bσxy
,
|∂u X|
j=1
where b is magnitude of the Burgers vector, σappl describes the external (applied) stress. The
plastic-relaxation term contains the shear modulus µ (we set µ = 80 GPa), and the average
dislocation density in material (we set = 9.2 · 1012 m−2 ). Interaction with dipolar loops is
(j)
given by the xy-component of the stress field tensor σxy describing the stress field generated
by j-th dipolar loop, j = 1, . . . , N (see [4,14,16]). Detailed calculation can be found in [24].
The analytical formula for σxy is valid under the assumption that the distance from the
diploar loop is large enough (see [24]).
(j)
Driving term for a dipolar loop Fx,total is given by the following formula
Fxc,(j) +
Fxj,k − F0
k=j
(j)
Fx,total Γ, x(1) (t), · · · , x(N ) (t) = 0
c,(j)
+
Fxj,k + F0
Fx
k=j
if Fxc,(j) +
Fxj,k > F0
k=j
if |Fxc,(j) +
Fxj,k | < F0
k=j
if
Fxc,(j)
+
Fxj,k < −F0
k=j
(12)
c,(j)
where the term Fx
is the x-axis component of the force interaction between the entire
dislocation curve Γ and the j-th dipolar loop:
c,(j)
=
σxy (j) bnx dl .
(13)
Fx
Γ
In (13), (j) connects the barycenter of the dipolar loop and a given point on the dislocation
curve, and nx is the x-axis component of the normal vector N of the dislocation curve. The
threshold term F0 stands for the internal lattice friction, i.e. it describes minimal force needed
to bring an arbitrary dipolar loop into motion. The interaction between dipolar loops cannot be
neglected. The term Fxj,k , describes mutual interaction between the j-th and the k-th dipolar
loops, k = 1, . . . , N, k = j. This term prevents an arbitrary dipolar loop to move across any
other dipolar loop.
The term Fxj,k can be approximately evaluated (see [26] and references therein) provided
the average half-width of a dipolar loop h is small enough compared to the distance between
the j-th and k-th dipolar loops (measured between central points of the rectangles of these two
loops). Final formula for Fxj,k has three different forms depending on different combination of
the types and configurations of the dipolar loops. Details can be found in [24].
Remark. The interaction between dipolar loops exhibits a rich variety of behaviour with
respect to the mutual position. This has been discussed in [24].
Simulation results. The method of asymptotically uniform redistribution of nodes allows
to perform long term simulations and study more in detail elementary processes leading to
plastic deformation. Such a result is presented here.
Advances in the Multi-Scale Computational Design of Condensed Matter Interfaces
185
t = 0.0
dislocation
V1
V2
300
200
100
0
-100
-200
-1500
-1000
-500
0
500
1000
1500
t = 63.0018
dislocation
V1
V2
300
cluster 3
200
100
cluster 1
0
cluster 2
-100
-200
-1500
-1000
-500
0
500
1000
1500
Fig. 4. Interaction dynamics of a dislocation curve and 20 randomly positioned dipolar loops of types
V1 and V2 . In the top figure the initial state at time t = 0 and in the bottom figure the state at
t = 63.0018 is shown. The coordinates are expressed in nm.
A computational study consisting of initially straight dislocation curve of the length 2.4 µm
between the points [−1200, 0, 0] and [1200, 0, 0] and 20 randomly placed dipolar loops is set up.
The centers of the dipolar loops are located in a cuboid limited by the coordinates [−400, 12, 50]
and [400, 40, 300]. The initial condition is shown in the form of 2D projection to the glide plane in
the top of Fig. 4. The applied stress is periodical with the frequency 1.57 s−1 and the amplitude
137.6 MPa. The simulation state at time t = 63.0018 is shown in the bottom of Fig. 4. Here,
the clustering phenomenon is observed during the simulation and a formation of three separate
clusters is indicated in the bottom figure. Several dipolar loops move during the simulation
close to each other and “lock” themselves in a particular mutual position. In further evolution,
these dipolar loops do not change their mutual position and move as a single block, a cluster
of dipolar loops. New dipolar loops can join the cluster, but rarely a dipolar loop escapes from
such a cluster.
Simulations with small number of dipolar loops indicate that the presence of the clustering
phenomenon in the simulation depends on positions and types of dipolar loops at the beginning
of the simulation. If we use the same positions of dipolar loops and only change their types, we
can get substantially different results. In one case the clustering phenomenon can be observed
while in the other case the dipolar loops may be swept towards the ends of the dislocation
186
The European Physical Journal Special Topics
b
bowing-out
edge segment
screw gliding
segment
channel
wall
dipolar loops
Fig. 5. Schematics of PSB.
curve. This behavior deserves further investigations to better understand the processes in the
background.
5 Dislocations in PSB channel
In this section, motion of dislocation curves in confined geometry of dislocation pattern in
persistent slip bands (PSBs) is considered. PSBs have been the subject of many experimental
and theoretical investigations, see e.g. [27–35]. The study of properties of PSBs, especially in
fatigued f.c.c. single crystals, has become an important task by itself and has increased our
understanding of the relation between dislocation microstructures and the mechanical behavior
of materials.
PSBs can be detected in the bulk of fatigued metals and fully developed PSBs consist of
thin lamellae, typically 1 − 2 µm wide, oriented parallel to the primary slip plane into which
the plastic strain concentrates. In pure f.c.c. metal crystals oriented for single slip, a PSB
consists of thin dislocation walls which are arranged in fairly equal spacings perpendicular to
the primary slip direction. The walls divide the PSB lamellae into long channels forming the so
called ladder structure [27]. The PSB walls are clusters consisting mainly of narrow elongated
dipolar edge dislocation loops (DLs), with the local dislocation density ρw = 5 × 1015 m−2 [27].
In the channels a few curved glide dislocations can be recognized [27,28]. There are three basic
dislocation processes in the channel: (i) bowing out of edge dislocation segments from the walls
forming glide dislocations of predominant screw character, (ii) these dislocation segments glide
between the walls and drag out edge dislocations at the wall-channel interfaces, (iii) encounters
of the glide dislocations with the glide dislocations of opposite sign. Sketch of described situation
can be seen in Fig. 5.
In this section, we consider the case when two dislocations interact in a channel when the
walls are created by a set of dipolar loops which can optionally be fixed on their positions. The
Advances in the Multi-Scale Computational Design of Condensed Matter Interfaces
187
problem is described by the following set of equations
∂t X(k) = T
2
X(k)
∂uu
∂u X(k)⊥
(1)
(2)
+
F
(t,
X
,
X
,
Λ
,
.
.
.
,
Λ
)
, k = 1, 2,
1
N
|∂u X(k) |2
|∂u X(k) |
(k)
X(k) (t, 0) = Xfixed,0 ,
(k)
X(k) (t, 1) = Xfixed,1 , k = 1, 2,
(k)
X(k) (0, u) = Xini (u), k = 1, 2
(14)
dx(j)
1 (j) (1) (2) (1)
=
Fx,total X , X , x , . . . , x(N ) ,
dt
BP
(j)
x(j) (0) = xini , j = 1, . . . , N.
where the term F (t, X(1) , X(2) , Λ1 , . . . , ΛN ) = bσeff represents the magnitude of the driving
force per unit length of curve. Here σeff represents the local resolved shear stress, i.e. the stress
in the glide plane, acting on the dislocation segment. The form of σeff is discussed later. The
term
(j)
Fx,total X(1) , X(2) , x(1) , . . . , x(N )
is evaluated in the way described in Section 4, Eq. (12).
The resolved shear stress σeff is a sum of various kind of stresses that affect motion of
dislocation,
σeff = σdisl + σloop + σappl + σ0 .
σdisl is the resolved shear stress exerted by other gliding dislocations, σloop represents the interaction with rigid edge dipoles or dislocation loops. The term σappl approximates the stress in
the channel determined by the applied boundary conditions, i.e. applied stress. In the present
considerations an influence of a friction stress and debris left by shuttling dislocations is incorporated in the term σ0 . In this place we have to note that in the numerical implementation of
the model (see Section 6), the components of the resolved shear stress, i.e. the terms σdisl , σloop
and σappl , have to be adjusted to the dislocation approximated by a piece-wise linear curve.
Shear stress exerted by another dislocation. The resolved shear stress in the channel caused by
the elastic field of the curved dislocation Γ can be expressed as
σdisl (x, y) =
σd (x, y, u)|∂u X|du .
(15)
Γ
Here, σd is the resolved shear stress exerted by a dislocation element. For evaluation of σd , the
de Wit formula [36] for the stress field is employed. For details, see [37].
Shear stress exerted by a dislocation loop. In our investigations we consider that the gliding
dislocations are confined between the walls of PSB. The walls are modelled as a cluster of
randomly distributed dislocation loops. They contribute to the term σloop in the same way as
described in Section 4, Eq. (12).
Applied stress σappl . The elastic forces influence the motion of dislocations through the
volume of the material. Simplification of this model consists of the fact that two simplified
limit cases are considered: (i) the “stress controlled regime” in which the applied stress σappl
in the channel is kept uniform (the same assumption was employed in the original composite
model proposed by Mughrabi [27,28]), and (ii) the “strain controlled regime” in which the total
strain εtot remains uniform. For details, the reader is referred to [37]. In this section only case
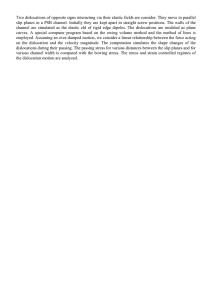
(i) is explored.
Example of simulation. The two dislocations, initially straight segments of length 1200 nm
stretched through the channel of width 1200 nm, glide on parallel slip planes separated by
10 nm in the volume 1600 nm × 1400 nm × 80 nm. The width of the walls is 150 nm. Dislocation
188
The European Physical Journal Special Topics
t = 0.002
t = 0.355
t = 0.510
t = 0.980
Fig. 6. Evolution of two dislocations gliding on two separate glide planes confined between two walls
of dipolar loops. We can see the evolution from initial configuration through forming of dislocation
dipole to trapping of tails of dislocations by walls.
loops which approximate the PSB-walls are taken as rectangular rigid objects of length 60 nm
and width 7 nm. Other parameters are: magnitude of the Burgers vector b = 0.256 nm, shear
modulus µ = 42.1 GPa, Poisson ratio ν = 0.33, drag coefficient B = 1.0 · 10−5 Pa · s and density
of glide dislocations ≈ 1013 m−2 . The dislocations are pushed through the channel by applied
stress and interact with each other. They interact also with DLs and parts of dislocations are
trapped near or penetrate the walls, see Fig. 6.
6 Discretization of the evolution problem
The approach to discretization of the model is demonstrated on Eq. (3) which are treated by
means of a numerical scheme based on discretization of the model equations in space by the
finite-volume method and subsequently, on discretization of the model equations in time by the
higher-order Runge-Kutta scheme.
At a given time moment, the dislocation curve Γ is approximated by a piece-wise linear
curve with vertices-nodes Xi (t), i = 0, ..., M in the glide plane. The end-points X0 and XM are
prescribed by the boundary conditions (6)
X0 = Xfixed,0 , XM = Xfixed,L ,
and do not depend on time.
The
segments
[X
i−1 , Xi ] are called flowing finite volumes. We also define dual volumes
i+1
Vi = Xi− 12 , Xi ∪ Xi , Xi+ 12 , i = 1, . . . , M − 1, where Xi− 12 = Xi−12+Xi and Xi+ 12 = Xi +X
2
are the centers of segments [Xi−1 , Xi ] and [Xi , Xi+1 ], respectively (see Fig. 7).
Advances in the Multi-Scale Computational Design of Condensed Matter Interfaces
di+1
di
Xi−1
189
Xi
Xi− 12
Xi+ 12
Xi+1
Fig. 7. Piecewise linear approximation of the dislocation curve, flowing finite volumes and construction
of dual volumes.
The finite-volume method is based on integrating the evolution Eq. (3) over the dual volume
Vi . We then obtain
Vi
B∂tXds =
Vi
2
T ∂ss
Xds +
Vi
F ∂s X⊥ ds,
(16)
from which it follows that
B
Xi+ 1
Xi+ 1
di + di+1 dXi
= T [∂s X]X 21 + Fi X⊥ X 21 ,
i−
i−
2
dt
2
2
where
di = |Xi − Xi−1 | =
(17)
x )2 + (X z − X z )2
(Xix − Xi−1
i
i−1
(18)
are the distances between the nodes (the choice of the glide plane implies that the y-coordinate
vanishes).
The values Fi are a piece-wise constant approximation of function F over the dual volume
Vi with
Fi = F (Xi ).
Replacing the terms on the right-hand side of (17) by finite differences and averaged values, respectively, the following system of ordinary differential equations (ODE’s) is obtained (compare
with [14])
X⊥ − X ⊥
Xi+1 − Xi
2
Xi − Xi−1
dXi
2
i−1
=T
, (19)
−
Fi i+1
B
+
dt
di + di+1
di+1
di
di + di+1
2
i = 1, . . . , M − 1.
The initial conditions for this problem are given by the distribution of initial node positions
given by values s1 , . . . , sM −1 of the arc-length parameter
Xi (0) = Xini (si ),
i = 1, . . . , M − 1.
The discretization of Γ also influences the the stress contribution of the dislocation curve to the
motion equation of the j-th dipolar loop due to term (13) where the contributions of each curve
c,(j)
for which we use the same notation
segment are summed to obtain approximation of Fx
Fxc,(j) (t) =
M
−1
i=0
x
(j)
z
(j)
z
b Xi+1
σxy Xi+
(t), −y (j) , Xi+
(t) − Xiz (t) ,
1 (t) − x
1 − z
2
2
(20)
where x(j) (t), y (j) , z (j) is the center of the dipolar loop at time t where y (j) and z (j) are fixed
and time independent.
(j)
The driving term Fx,total in (8) is then evaluated according to (12). Note that it depends
on the nodal positions Xi (t), i = 0, ..., M .
1 (j)
dx(j) (t)
=
F
(X0 (t), . . . , XM (t), x(0) (t), . . . , x(N ) (t)),
dt
BP x,total
j = 1, . . . , N.
(21)
190
The European Physical Journal Special Topics
The discretized evolution problem is completed by initial and boundary conditions and has
the following form
B
X⊥ − X ⊥
Xi+1 − Xi
2
dXi
Xi − Xi−1
2
i−1
=T
,
−
Fi i+1
+
dt
di + di+1
di+1
di
di + di+1
2
i = 1, . . . , M − 1.
dx(j) (t)
1 (j)
=
F
(X0 (t), . . . , XM (t), x(0) (t), · · · , x(N ) (t)),
dt
BP x,total
j = 1, · · · , N.
X0 = Xfixed,0 , XM = Xfixed,L ,
Xi (0) = Xini (si ),
i = 1, . . . , M − 1,
(22)
(23)
(24)
(j)
x(j) (0) = xini ,
j = 1, . . . , N.
(25)
This problem is a system of ODE’s depending on time. It is solved by the Runge-Kutta fourthorder scheme according to [14] and in a way similar to [38,39].
The authors were partly supported by the project LC06052 of the Ministry of Education, Youth and
Sports of the Czech Republic, the first, fourth and fifth author was partly supported by the project
MSMT 6840770010 of the Ministry of Education of the Czech Republic. The research of the second
author was supported by the project MSMT 6840770021 of the Ministry of Education of the Czech
Republic.
References
1. J. Hirth, J. Lothe, Theory of Dislocations (John Willey, New York, 1982)
2. T. Mura, Micromechanics of Defects in Solids (Kluwer Academic Publishers Group,
The Netherlands, 1987)
3. J. Kratochvı́l, M. Saxlová, Phys. Scr. T49B, 399 (1993)
4. F. Kroupa, Phys. Stat. Sol. 9, 27 (1965)
5. J. Kratochvı́l, F. Kroupa, L. Kubin, The Sweeping of Dipolar Loops in Cyclic Deformation: Kinetic
Diagrams, in Proceedings of the 20th Risoe Int. Symposium on Material Science: DeformationInduced Microstructures: Analysis and Relation to Properties (Risoe National Laboratory, Roskilde,
Denmark, 1999), p. 387
6. M. Saxlová, J. Kratochvı́l, J. Zatloukal, Mater. Sci. Eng. A234–236, 205 (1997)
7. J. Kratochvı́l, Mater. Sci. Eng. A 309–310, 331 (2001)
8. B. Devincre, L. Kubin, Mater. Sci. Eng. A 8–14, 234 (1997)
9. M. Fivel, G. Canova, Modelling Simul. Mater. Sci. Eng. 7, 753 (1999)
10. M. Rhee, H. Zbib, J. Hirth, H. Huang, T. de la Rubia, Modelling Simul. Mater. Sci. Eng. 6, 467
(1998)
11. M. Tang, L. Kubin, G. Canova, Acta Mater. 46, 3221 (1998)
12. N. Ghoniem, L. Sun, Phys. Rev. B 60, 128 (1999)
13. N. Ghoniem, J. Huang, Z. Wang, Phil. Mag. Lett. 82, 55 (2002)
14. V. Minárik, J. Kratochvı́l, K. Mikula, M. Beneš, Numerical Simulation of Dislocation Dynamics,
in Numerical Mathematics and Advanced Applications, ENUMATH 2003 (peer reviewed proceedings), edited by M. Feistauer, V. Dolejšı́, P. Knobloch, K. Najzar (Springer Verlag, 2004), p. 631,
ISBN 3-540-21460-7
15. V. Minárik, J. Kratochvı́l, K. Mikula, Numerical Simulation of Dislocation Dynamics by Means
of Parametric Approach, in Proceedings of the Czech Japanese Seminar in Applied Mathematics,
edited by M. Beneš, J. Mikyška, T. Oberhuber, Faculty of Nuclear Sciences and Physical
Engineering, Czech Technical University in Prague, Prague (2005), p. 128, ISBN 80-01-03181-0
16. Š. Verecký, J. Kratochvı́l, F. Kroupa, Phys. Stat. Sol. (a) 191, 418 (2002)
17. M. Beneš, Appl. Math. 48, 437 (2003)
18. K. Deckelnick, G. Dziuk, C. Elliott, Acta Numer. 14, 139 (2005)
Advances in the Multi-Scale Computational Design of Condensed Matter Interfaces
191
19. D. Ševčovič, Qualitative and quantitative aspects of curvature driven flows of planar curves, in
Topics on Partial Differential Equations, edited by P. Kaplický, Š. Nečasová, Lecture Notes Vol. 2,
Jindřich Nečas Center for Mathematical Modelling, Faculty of Mathematics and Physics, Charles
University in Prague (MatFyzPress, Prague, 2007), p. 55
20. P. Pauš, M. Beneš, Kybernetika (accepted) (2009)
21. S. Angenent, M. Gurtin, Arch. Rat. Mech. Anal. 108, 323 (1989)
22. G. Dziuk, Math. Models Meth. Appl. Sci. 4, 589 (1994)
23. K. Mikula, D. Ševčovič, Comput. Vis. Sci. 6, 211 (2004), ISSN 1432-9360,
http://dx.doi.org/10.1007/s00791-004-0131-6
24. V. Minárik, M. Beneš, J. Kratochvı́l, J. Appl. Phys. (submitted) (2008)
25. S. Yazaki, Kybernetika 43, 913 (2007)
26. V. Minárik, J. Kratochvı́l, Kybernetika 43, 841 (2007)
27. H. Mughrabi, edited by O. Brulin and R.K.T. Hsieh, Continuum Models of Discrete Systems
(1981), p. 241
28. H. Mughrabi, Acta Metall. 31, 1367 (1983)
29. P. Neumann, Phys. Scr. T19, 537 (1987)
30. K. Differt, U. Essmann, Mater. Sci. Eng. A 164, 295 (1993)
31. K.D.U. Essmann, Mater. Sci. Eng. A 208, 56 (1996)
32. H. Mughrabi, F. Pschenitzka, Phil. Mag. 85, 3029 (2006)
33. P. Hähner, Scr. Mater. 34, 435 (1996)
34. B.T.a.C.H. P. Hähner, Acta Mater. 46, 5073 (1998)
35. H. Mughrabi, F. Pschenitzka, Mater. Sci. Eng. A 483–484, 469 (2008)
36. R. de Wit, Phys. Stat. Sol. 20, 567 (1967)
37. J. Křištan, J. Kratochvı́l, V. Minárik, M. Beneš, Modelling Simul. Mater. Sci. Eng. 17, 045009
(2009)
38. T. Oberhuber, Kybernetika 43, 855 (2007)
39. J. Mach, Application of Non-linear Diffusion in Algorithms of Mathematical Visualization, in
Proceedings of the Czech Japanese Seminar in Applied Mathematics 2006, edited by M. Beneš,
M. Kimura, T. Nakaki, Faculty of Mathematics, Kyushu University Fukuoka, COE Lecture Note,
Vol. 6 (2007), p. 156, ISSN 1881-4042