Online Model Predictive Torque Control for Permanent Magnet
advertisement

Online Model Predictive Torque Control for
Permanent Magnet Synchronous Motors
Gionata Cimini∗ , Daniele Bernardini∗ , Alberto Bemporad∗ and Stephen Levijoki†
∗ ODYS
† General
Srl
Motors Company
2015 IEEE International Conference on Industrial Technology
Gionata Cimini, gionata.cimini@odys.it
1 / 20
Outline
1
Introduction and Motivations
2
Model Predictive Control Design
3
Experimental Results
4
Conclusions
Gionata Cimini, gionata.cimini@odys.it
2 / 20
Company Overview
(www.odys.it)
ODYS is a private SME founded in 2011, originally as a university spin-off
Core business: consultancy and software for the development of advanced
control systems, with special focus on model predictive control (MPC)
Main expertise: advanced multivariable control design, efficient real-time
optimization algorithms, and tools for their deployment in embedded systems
Application domains
automotive
aerospace
energy
process control
Gionata Cimini, gionata.cimini@odys.it
3 / 20
Background
The standard control method for PMSMs is the Field Oriented Control (FOC)
(cascade structure, with three linear regulators)
→The work deals with the application of Model Predictive Control (MPC), to
PMSM torque control.
MPC in electrical drives control is, mainly, motivated by two facts:
mathematical models of these systems are relatively well known
several constraints are needed for safety reasons
Gionata Cimini, gionata.cimini@odys.it
4 / 20
Background
The standard control method for PMSMs is the Field Oriented Control (FOC)
(cascade structure, with three linear regulators)
→The work deals with the application of Model Predictive Control (MPC), to
PMSM torque control.
MPC in electrical drives control is, mainly, motivated by two facts:
mathematical models of these systems are relatively well known
several constraints are needed for safety reasons
The main idea of MPC
Obtain the control actions by solving, at each sampling time, a finite-horizon
optimal control problem
Gionata Cimini, gionata.cimini@odys.it
4 / 20
Model Predictive Control
Output Setpoint
Past
Measured
Output
Control
Input
k
k + Nu
k + Np
Linear prediction model
Control and Prediction Horizon
Hard input and soft output constraints
Gionata Cimini, gionata.cimini@odys.it
5 / 20
Model Predictive Control
Output Setpoint
Past
Predicted
Output
Future
Measured
Output
Predicted
Input
Control
Input
Control Horizion
Prediction Horizion
k
k + Nu
k + Np
Linear prediction model
Control and Prediction Horizon
Hard input and soft output constraints
Gionata Cimini, gionata.cimini@odys.it
5 / 20
Model Predictive Control
Output Setpoint
Past
Future
Measured
Output
Control
Input
k+1
k + Nu
k + Np
Linear prediction model
Control and Prediction Horizon
Hard input and soft output constraints
Gionata Cimini, gionata.cimini@odys.it
5 / 20
Existing solutions
Explicit MPCa : the optimization problem is pre-solved offline
via multiparametric Quadratic Programming (mpQP)
! it is an easy-to-implement PieceWise Affine (PWA) function of
the parameters
! fast binary search tree algorithm can be used
% it is applicable only to small problems
% high memory requirements
Gionata Cimini, gionata.cimini@odys.it
6 / 20
Existing solutions
Explicit MPCa : the optimization problem is pre-solved offline
via multiparametric Quadratic Programming (mpQP)
! it is an easy-to-implement PieceWise Affine (PWA) function of
the parameters
! fast binary search tree algorithm can be used
% it is applicable only to small problems
% high memory requirements
Finite Control Setb :
exploits the discrete nature of the
system by manipulating the inverter switch positions directly
! MPC is solved on line, by enumeration
! very fast with short prediction horizon
% computational load scales exponentially with the horizon
% high sampling frequency, not decoupled from control frequency
% variable frequency
————————————————————a
Bolognani, S.; Bolognani, S.; Peretti, L.; Zigliotto, M., ”Design and Implementation of Model Predictive Control for Electrical
Motor Drives”
b
Rodriguez, J. and Kazmierkowski, M.P. and Espinoza, J.R. and Zanchetta, P. and Abu-Rub, H. and Young, H.A and Rojas,
”C.A, State of the Art of Finite Control Set Model Predictive Control in Power Electronics”
Gionata Cimini, gionata.cimini@odys.it
6 / 20
MPC with online optimization
Embedded QP solver:
Model Predictive Control → Quadratic Programming with affine constraints
! MPC is solved online
! Low memory Requirements
! Switching frequency decoupled from sampling frequency
! Fixed switching frequency
% High computational burden
Main Objective
Verify the feasibility of embedded, online MPC
Application in low-power DSP, commonly used for motion control
Gionata Cimini, gionata.cimini@odys.it
7 / 20
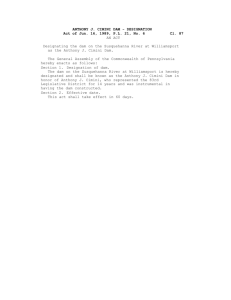
Standard PI Field Oriented Control
Inverter
PWM
PMSM
abc
abc
dq
dq
id
ud
θ
iq
R
Kt
PI
id,ref
uq
PI
ω
τ
τref
PI
ωref
The aim is replacing the standard PI-based torque controller, with . . .
Gionata Cimini, gionata.cimini@odys.it
8 / 20
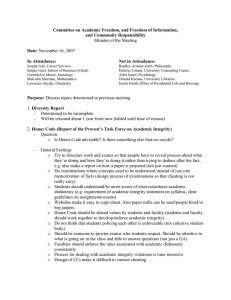
Proposed MPC Torque Control
Inverter
PWM
PMSM
abc
abc
dq
dq
id
θ
iq
R
ud
uq
MPC
ω
id,ref
τref
PI
ωref
. . . an MPC torque control, solved with online optimization.
Gionata Cimini, gionata.cimini@odys.it
9 / 20
Outline
1
Introduction and Motivations
2
Model Predictive Control Design
3
Experimental Results
4
Conclusions
Gionata Cimini, gionata.cimini@odys.it
10 / 20
Prediction Model
Consider an isotropic PMSM , with one pole pair. The nonlinear mathematical model is:
1
R
id (t) + ω(t)iq (t) + ud (t)
L
L
R
1
λ
i̇q (t) = − iq (t) − ω(t)id (t) + uq (t) − ω(t)
L
L
L
B
Kt
1
ω̇(t) = ω(t) +
iq (t) − τl (t),
J
J
J
i̇d (t) = −
Gionata Cimini, gionata.cimini@odys.it
11 / 20
Prediction Model
Consider an isotropic PMSM , with one pole pair. The nonlinear mathematical model is:
1
R
id (t) + ω(t)iq (t) + ud (t)
L
L
R
1
λ
i̇q (t) = − iq (t) − ω(t)id (t) + uq (t) − ω(t)
L
L
L
B
Kt
1
ω̇(t) = ω(t) +
iq (t) − τl (t),
J
J
J
i̇d (t) = −
——————————————————————————–
The linearized model of the electrical subsystem is obtained imposing nominal speed ω(t) = ω0 .
x(k + 1) = Ax(k) + Bu(k) + Gv(k)
y(k) = Cx(k)
Ts
Z
A = eAc Ts ,
B=
eAc τ dτ Bc ,
0
R
− L
Ac =
−ω0
ω0
R
−
L
Gionata Cimini, gionata.cimini@odys.it
Ts
Z
G=
eAc τ dτ Gc ,
C = Cc
0
1
L
Bc =
0
0
1
L
0
λ
Gc =
−
L
"
#
Cc =
1
0
0
Kt
11 / 20
System Constraints
The most critical constraints concern the electrical components
u ∈ Ũ = {u ∈ R2 : kuk2 ≤ Vmax }
(1)
x ∈ X̃ = {x ∈ R2 : kxk2 ≤ Imax }
(2)
uq
iq
Vmax
Imax
ud
(a)
Voltage constraints
id
(b)
Current constraints
Vmax → Depending from the maximum
DC-bus and from the modulation scheme
√
(Vmax = VDC / 3 for PWM and SVM)
Imax → Chosen to prevent overheating. Peaks larger than this limit are allowed
for short time intervals .
Gionata Cimini, gionata.cimini@odys.it
12 / 20
System Constraints
The most critical constraints concern the electrical components
u ∈ Ũ = {u ∈ R2 : kuk2 ≤ Vmax }
(1)
x ∈ X̃ = {x ∈ R2 : kxk2 ≤ Imax }
(2)
uq
iq
Vmax
Imax
U
X
ud
(c)
Voltage constraints
id
(d)
Current constraints
Vmax → Depending from the maximum
DC-bus and from the modulation scheme
√
(Vmax = VDC / 3 for PWM and SVM)
Imax → Chosen to prevent overheating. Peaks larger than this limit are allowed
for short time intervals .
Gionata Cimini, gionata.cimini@odys.it
12 / 20
How about embedded online optimization?
MPC problem formulation
min
∆u
N
−1
X
kQ(yk+i|k − r(k))k22 +
NX
u −1
i=0
kR∆uk+j|k k22 +
j=0
+ kP (yk+N |k − r(k))k22
s.t. xk|k = x(k)
xk+i+1|k = Axk+i|k + Buk+i|k + Gv(k)
yk+i+1|k = Cxk+i+1|k
uk+i|k ∈ U,
xk+i+1|k ∈ X
i = 0, 1, . . . , N − 1
j = 0, 1, . . . , N − Nu − 1
Gionata Cimini, gionata.cimini@odys.it
13 / 20
How about embedded online optimization?
MPC problem formulation
min
∆u
N
−1
X
kQ(yk+i|k − r(k))k22 +
NX
u −1
i=0
kR∆uk+j|k k22 +
j=0
+ kP (yk+N |k − r(k))k22
s.t. xk|k = x(k)
xk+i+1|k = Axk+i|k + Buk+i|k + Gv(k)
Quadratic problem (QP)
1 0
z Hz + p(t)0 F 0 z
2
s.t. Gz ≤ W + Sp(t)
min q(z) ,
z
yk+i+1|k = Cxk+i+1|k
convex quadratic objective
function
uk+i|k ∈ U,
polyhedral constraints
xk+i+1|k ∈ X
i = 0, 1, . . . , N − 1
j = 0, 1, . . . , N − Nu − 1
Gionata Cimini, gionata.cimini@odys.it
QPs are easier to solve than
standard formulation
13 / 20
How about embedded online optimization?
MPC problem formulation
min
∆u
N
−1
X
kQ(yk+i|k − r(k))k22 +
NX
u −1
i=0
kR∆uk+j|k k22 +
j=0
+ kP (yk+N |k − r(k))k22
s.t. xk|k = x(k)
xk+i+1|k = Axk+i|k + Buk+i|k + Gv(k)
Quadratic problem (QP)
1 0
z Hz + p(t)0 F 0 z
2
s.t. Gz ≤ W + Sp(t)
min q(z) ,
z
yk+i+1|k = Cxk+i+1|k
convex quadratic objective
function
uk+i|k ∈ U,
polyhedral constraints
xk+i+1|k ∈ X
i = 0, 1, . . . , N − 1
j = 0, 1, . . . , N − Nu − 1
QPs are easier to solve than
standard formulation
We developed an embedded QP solver
Gionata Cimini, gionata.cimini@odys.it
13 / 20
Outline
1
Introduction and Motivations
2
Model Predictive Control Design
3
Experimental Results
4
Conclusions
Gionata Cimini, gionata.cimini@odys.it
14 / 20
Processor In the Loop Experiments
Inverter
PWM
PMSM
abc
abc
dq
θ
dq
id
iq
R
ud
uq
Gionata Cimini, gionata.cimini@odys.it
MPC
ω
id,ref
τref
PI
ωref
15 / 20
Processor In the Loop Experiments
Inverter
PWM
PMSM
abc
abc
dq
θ
dq
id
iq
R
ud
uq
MPC
ω
id,ref
τref
PI
ωref
c
Simulation model: MBE.300.E500 PMSM, commercially available from Technosoft
Gionata Cimini, gionata.cimini@odys.it
15 / 20
Processor In the Loop Experiments
Inverter
PWM
PMSM
abc
abc
dq
θ
dq
id
iq
R
ud
uq
MPC
ω
id,ref
τref
PI
ωref
c
Simulation model: MBE.300.E500 PMSM, commercially available from Technosoft
c
. (32-bit, 150 MHz CPU
Platform: Low cost F28335 Delfino DSP by Texas Instruments
and IEEE-754 single-precision Floating- Point Unit)
Gionata Cimini, gionata.cimini@odys.it
15 / 20
Processor In the Loop Experiments
Inverter
PWM
PMSM
abc
abc
dq
θ
dq
id
iq
R
ud
uq
MPC
ω
id,ref
τref
PI
ωref
c
Simulation model: MBE.300.E500 PMSM, commercially available from Technosoft
c
. (32-bit, 150 MHz CPU
Platform: Low cost F28335 Delfino DSP by Texas Instruments
and IEEE-754 single-precision Floating- Point Unit)
This board is commonly used for motion control!
Gionata Cimini, gionata.cimini@odys.it
15 / 20
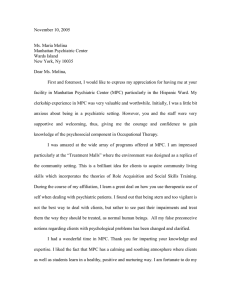
Control Performance
torque control with MPTC
0.03
0.02
τ (N·m)
0.01
0
-0.01
-0.02
τl
-0.03
0
τref
MPC
0.1
τMPC
0.2
0.3
0.4
0.5
time (s)
Gionata Cimini, gionata.cimini@odys.it
16 / 20
Control Performance
torque control with MPTC
MPTC vs PI-FOC torque transient
0.03
0.02
-0.015
τ (N·m)
τ (N·m)
0.01
0
-0.01
-0.02
-0.025
τl
-0.02
τl
-0.03
0
τref
MPC
0.1
-0.03
0.3
τMPC
0.2
0.3
0.4
0.5
0.31
0.32
τPI
0.33
τMPC
0.34
time (s)
time (s)
Gionata Cimini, gionata.cimini@odys.it
16 / 20
Control Performance
torque control with MPTC
MPTC vs PI-FOC torque transient
0.03
0.02
-0.015
τ (N·m)
τ (N·m)
0.01
0
-0.01
-0.02
-0.025
τl
-0.02
τref
τl
-0.03
0
0.1
-0.03
0.3
τMPC
MPC
0.2
0.3
0.4
0.5
0.31
0.32
τPI
0.33
τMPC
0.34
time (s)
time (s)
MPTC vs PI-FOC speed tracking
4000
3500
ωref
ωPI
ωMPC
3000
ω (rpm)
2500
2000
1500
1000
500
0
-500
0
0.1
0.2
0.3
0.4
0.5
time (s)
Gionata Cimini, gionata.cimini@odys.it
16 / 20
Control Performance
torque control with MPTC
MPTC vs PI-FOC torque transient
0.03
0.02
-0.015
τ (N·m)
τ (N·m)
0.01
0
-0.01
-0.02
-0.025
τl
-0.02
τref
τl
-0.03
0
0.1
-0.03
0.3
τMPC
MPC
0.2
0.3
0.4
0.5
0.31
0.32
τPI
0.33
τMPC
0.34
time (s)
time (s)
MPTC vs PI-FOC speed tracking
4000
3500
ωref
ωPI
ωMPC
3000
MPC provides 2.3% and 4.2% improvement
in speed and torque tracking, respectively
(ISE index)
ω (rpm)
2500
2000
1500
1000
500
0
-500
0
0.1
0.2
0.3
0.4
0.5
time (s)
Gionata Cimini, gionata.cimini@odys.it
16 / 20
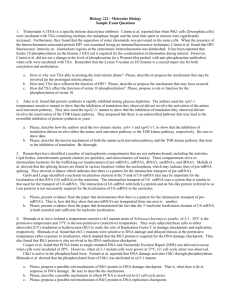
Online Optimization
The sampling interval is 0.3ms
Dimension of the QP problem: 5 decision variables and 41 constraints
DSP with 150MHz processor
One hardware multiplier 32 × 32 bit
Single precision
Gionata Cimini, gionata.cimini@odys.it
17 / 20
Online Optimization
The sampling interval is 0.3ms
Dimension of the QP problem: 5 decision variables and 41 constraints
DSP with 150MHz processor
One hardware multiplier 32 × 32 bit
Single precision
200
tsol (µs)
150
100
50
0
0
0.1
0.2
0.3
0.4
0.5
time (s)
Memory occupancy: 2.5kB out of the 34kB of memory provided by the DSP
Gionata Cimini, gionata.cimini@odys.it
17 / 20
Outline
1
Introduction and Motivations
2
Model Predictive Control Design
3
Experimental Results
4
Conclusions
Gionata Cimini, gionata.cimini@odys.it
18 / 20
Conclusions
Summary
The feasibility of MPC with online optimization in terms of
required computational power
memory occupancy
has been demonstrated through processor-in-the-loop tests on a low power DSP
Future Activities
Extension of the proposed strategy to consider the speed loop
Flux weakening handling
Evaluation of the effects of winding resistance increase due to temperature rise
Application to automotive problems, such as Electronic Throttle Control
and Hybrid Electric Motor Control
Gionata Cimini, gionata.cimini@odys.it
19 / 20
Thank you for your attention!!
www.odys.it
Gionata Cimini, gionata.cimini@odys.it
20 / 20