1 Linear Variable Differential Transformer
advertisement

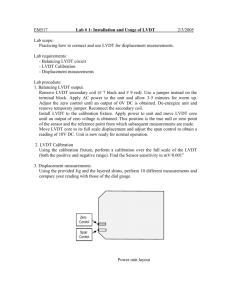
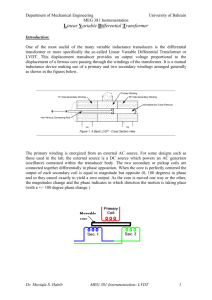
ENG-7858: Industrial Control and Instrumentation Laboratory Experiments Credit 4 × 5% 1 Linear Variable Differential Transformer 1.1 OBJECTIVES In this lab, you will learn how to build A) a simple LVDT capable to measure position accurately, and B) an oscillator capable of driving the primary winding of the LVDT. In particular, you will get familiar with these aspects of instrumentation: • Coil winding. • Impedance measurement. • Analog circuit simulation. • Oscillator analysis. 1.2 BACKGROUND The letters LVDT are an acronym for Linear Variable Differential Transformer, a common type of electromechanical transducer that can convert the rectilinear motion of an object to which it is coupled mechanically into a corresponding electrical signal. The transformer’s internal structure consists of a primary winding centered between a pair of identically wound secondary windings, symmetrically spaced about the primary. The coils are wound on a one-piece hollow spool. This coil assembly is the stationary element of the position sensor. The moving element of an LVDT is a separate tubular armature of magnetically permeable material called the core, which is free to move axially within the coil’s 1 hollow bore, and mechanically coupled to the object whose position is being measured. This bore is typically large enough to provide substantial radial clearance between the core and bore, with no physical contact between it and the coil. In operation, the LVDT’s primary winding is energized by alternating current of appropriate amplitude and frequency, known as the primary excitation. The LVDT’s electrical output signal is the differential AC voltage between the two secondary windings, which varies with the axial position of the core within the LVDT coil. This AC output voltage is converted by an electronic circuitry to high level DC voltage or current. Below is a list of features that make LVDT an ideal candidate for our electronic weight scale/balance project; for more information see http://www.macrosensors.com/lvdt macro sensors/lvdt tutorial/ or “Handbook of Measurement and Control: An Authoritative Treatise on the Theory and Application of the LVDT” (Paperback) by Edward E. Herceg, Schaevitz Engineering (1980), ASIN: B000I76D0Q. • Friction-Free Operation • Infinite Resolution • Unlimited Mechanical Life • Overtravel Damage Resistance • Zero Cross-Axis Sensitivity • Environmentally Robust • Null Point Repeatability • Fast Dynamic Response • Absolute Position Output • (Separable Coil And Core)] 1.3 EQUIPMENT 2 Equipment Digital LCR Meter Function generator with GND isolation plug Variable DC power supply Prototyping breadboard with jump wires Multimeter and Storage oscilloscope Part A Acrylic/glass tube 1/4” / 1/8” - 4” Two 2.7m long enamel wire #30 One 8.0m long enamel wire #30 Lacing cord Scotch tape & scissors Paraffin/candle & heat gun Marker & ruler Utility knife or fine sand paper Part B Two NPN transistors (2N2219A or equivalent) Resistors Capacitors 1.4 LVDT Construction & Analysis 1.4.1 Steps for winding LVDT: 1. Watch the practical demonstration !!! 2. Make the PRIMARY winding first: (a) Use a pen to mark off the piece of acrylic tube as follows (Figure 1): i. Mark 1, the center of tube ii. Mark 2&3, 16mm from mark 1 on both sides (b) Mark one end of the lacing cord, bend it to create a loop, and tape it to the tube as shown in Figure 2. (c) Pass 20cm of the 8.0m long wire through the loop as shown in Figure 3 and tape the short end. (d) Wind 50 turns of the primary winding over the lacing cord. Wind the coil so that all turns are nicely packed together (Figure 4). This will not cause a short circuit because the wire is coated with an insulating enamel. 3 The easiest way of doing this is to make 10 turns quickly at one time with spaces between individual turns, and then pack the turns tightly together by sliding them back. Always keep the wire pretensioned at any time. NOTE: Don’t wind the coil by holding the long end of wire still and moving your hand around and around the tube. When you do this every turn puts a twist in the wire. After a while the wire will start to kink and then get into a hopeless tangle. (e) Remove the tape and pull gently the marked end of the cord until the first turn of the primary winding is tightly held in place (Figure 5). (f) Complete the the first layer of winding by making another 55 turns. (g) Tape over the first coil layer to make a smooth surface without grooves for the second layer, and crossover the lacing cord to the other side. (h) Wind 100 turns over the lacing cord the same way as in the first layer. The second layer should not exceed the end of the first layer as there are five turns less in the second layer. (i) Tape over the second layer and crossover the lacing cord again. Wind 50 turns the same way as before. Now, before we finish the coil, we need to do some preparation for fixing the last turn a similar way we did for the very first one. Crossover the lacing cord at the other end of the coil and tape the small loop just created near the coil’s end. Wind the remaining 45 turns and here again, the third layer should not exceed the end of the second/first layer as there are five turns less in the third layer. The last turn passes through the end loop on the cord. Pull the cord to tightly fix the last turn in place (Figure 6). (j) Congratulations, you just created the PRIMARY coil. Trim the cord ends as well as any tape left on both sides of the coil. 3. Make the two SECONDARY windings using the 2.7m long wire, each having two layers of 50 turns each, i.e. 100 turns in total. Always start from the PRIMARY side first so there is no gap left between the windings. 4. When all three LVDT windings are done, use the heat gun to put a layer of paraffin coat over the coils for extra protection. 5. Trim the wire leads to length between 15 to 20cm and use a utility knife or a sand paper to remove the insulating enamel on all six wire leads! 4 Figure 1 Figure 2 Figure 3 5 Figure 4 Figure 5 Figure 6 6 1.4.2 LVDT inductance measurement LCR Meter is used to measure the impedance of the primary coil for two core materials. Note the LCR meter can not measure a sample which has one lead connected to earth (grounded)! Measure in Series Inductance (Ls) Mode using 1V at 10kHz. Determine the series inductance Ls[µH] and the quality Q of the primary coil without a core and with a soft-iron ferromagnetic core. Calculate the respective Impedances Z[Ω] and the phase angles Φ at 10KHz. 1.5 Oscillator Design Install the circuit simulator from http://qucs.sourceforge.net/download.html for your platform (Win32, MacOS, Linux or FreeBSD). In your course folder you will find two oscillator models: 7858/Labs/Qucs/LVDT Colpitts.sch 7858/Labs/Qucs/LVDT Peltz.sch Perform the transient simulation for each model using the inductance value for the PRIMARY coil measured with the iron core. Find the capacitances to obtain the frequency between 10kHz and 100kHz. Print out the schematics and the waveforms generated. 1.6 Oscillator Construction & Analysis 1.6.1 Colpitts oscillator Implement the Colpitts oscillator shown in Figure 1 and perform the following measurements: 1. Using 5VDC supply, record the voltage across the PRIMARY winding with and without the core using an oscilloscope. 2. Record the frequency and the peak-to-peak voltage. 3. Repeat the previous steps using 10VDC supply. 7 Measurement with core without core 5VDC SUPPLY Frequency Vpp 10VDC SUPPLY Frequency Vpp 1.6.2 Peltz oscillator Implement the Peltz oscillator shown in Figure 2 and perform the following measurements: 1. Using 5VDC supply, record the voltage across the PRIMARY winding with and without the core using an oscilloscope. 2. Record the frequency and the peak-to-peak voltage. 3. Repeat the previous steps using 10VDC supply. Measurement with core without core 5VDC SUPPLY Frequency Vpp 10VDC SUPPLY Frequency Vpp 1.7 CONCLUSION Draw a conclusion on the performance of each oscillator using the data collected above. Select the oscillator having better performance in terms of the frequency, the quality of the generated sinusoid and the voltage/power level. Justify your decision. 8 Output1 C2 C=15nF T1 Type=npn R1 R=220 transient simulation L1 L=10u C1 C=15nF R2 R=5.1k R3 R=5.1k TR1 Type=lin Start=0 us Stop=50 us Output2 Equation Eqn1 Vout=Output1.Vt-Output2.Vt V1 U=10 V 15 10 Vout 5 0 -5 -10 -15 0 5e-6 1e-5 1.5e-5 2e-5 2.5e-5 3e-5 3.5e-5 time Figure 1: Colpitts Oscillator 9 4e-5 4.5e-5 5e-5 Output1 L1 L=10u V1 U=5 V C1 C=100nF T1 T2 Output2 transient simulation R1 R=560 TR1 Type=lin Start=0 Stop=0.1 ms Equation Eqn1 Vout=Output1.Vt-Output2.Vt 1 Vout 0.5 0 -0.5 -1 0 1e-5 2e-5 3e-5 4e-5 5e-5 6e-5 time Figure 2: Peltz Oscillator 10 7e-5 8e-5 9e-5 1e-4 2 2.1 LVDT Detector OBJECTIVES In this lab, you will learn how to build an LVDT signal detector. In particular, you will get familiar with these aspects of instrumentation: • Analog circuit simulation. • Precision half/full wave rectifiers. • Performance analysis. 2.2 BACKGROUND In the last Lab you built an oscillator to drive LVDT primary coil. Today, you will build an OP AMP based LVDT signal detector in the frequency range of 100kHz-1MHz. The high frequency impacts our design in terms of the component selection. Each secondary winding will pick up the primary signal through the mutual inductance coupling that is proportional to the ferromagnetic core position. Their relative amplitudes are then the measure of the core position. 2.3 EQUIPMENT 11 Equipment HP 4261A Digital LCR Meter Dual variable DC power supply Function Generator Prototyping breadboard with jump wires Multimeter and Storage oscilloscope Parts Eight LM318 OP AMPs or equivalent Resistors Capacitors Four fast (signal) diodes Miscellaneous Permanent markers of three colors (fine) Scissors Double sided Scotch tape Oscilloscope screen overlays (3x) 12 2.4 SIMULATION Use QUCS circuit simulator installed in the senior computer lab or you can install it home from http://qucs.sourceforge.net/download.html for your platform (Win32, MacOS, Linux or FreeBSD). In your course folder you will find three half/full way rectifier models: 7858/Qucs/Half Way OP AMP Rectifier.sch 7858/Qucs/Half Way OP AMP Rectifier 2.sch 7858/Qucs/Full Way OP AMP Rectifier.sch Perform a transient simulation for these models. Print out the waveforms for each case. R1 R=10k R3 R=10k Output D1 OP1 D2 12V _12V V1 U=1 V f=100kHz C1 C=100nF C2 C=100nF 13 transient simulation TR1 Type=lin Start=0 Stop=0.1 ms Output OP1 _12V V1 U=1 V f=100kHz transient simulation D1 12V C1 C=100nF TR1 Type=lin Start=0 Stop=0.1 ms R1 R=10k C2 C=100nF D1 12V R3 R=10k _12V V1 U=1 V f=100kHz 2.5 Output R5 R=10k OP1 C1 C=100nF C2 C=100nF transient simulation TR1 Type=lin Start=0 Stop=0.1 ms ANALYSIS Verify analytically, that: Half Way Rectifier uout = uin for uin > 0 and uout = 0 for uin < 0 Full Way Rectifier uout = |uin | 14 2.6 EXPERIMENT 2.6.1 Half Way Rectifier ’A’ Implement the half way rectifier ’A’ and record the waveforms for three frequencies, 1kHz, 10kHz, 100kHz. Half Way Rectifier ’A’ Waveforms 2.6.2 Half Way Rectifier ’B’ Implement the half way rectifier ’B’ and record the waveforms for three frequencies, 1kHz, 10kHz, 100kHz. 15 Half Way Rectifier ’B’ Waveforms 2.6.3 Full Way Rectifier Implement the full way rectifier and record the waveforms for three frequencies, 1kHz, 10kHz, 100kHz. Full Way Rectifier Waveforms 2.7 LVDT SIGNAL DETECTOR DESIGN 16 Based on the analysis, simulation and experiments above, select the rectifier of the best performance and implement the LVDT signal detector as shown in the block diagram below. Justify your selection. 17 SEC#1 --> Buffer --> Rectifier --> Buffer --| | |--> Summer & LP Filter | SEC#2 --> Buffer --> Rectifier --> Buffer --| (180deg phase) Using a mm scale, measure the LVDT output voltage versus the core displacement within ±10mm of the null position in 0.5mm steps. Comment on the measured characteristic. 18 3 3.1 Spring Loaded Weight Scale OBJECTIVES In this lab, you will learn how to analyze and calibrate a spring loaded weight scale. 3.2 BACKGROUND Spring is a mechanical transducer that converts force into displacement. We have already developed an electro-mechanical transducer, the LVDT, that converts reliably displacement (rectilinear motion) into voltage with no mechanical friction. Combining the two transducers, we can measure a force electronically. Weight measurement is then conducted through gravity that converts the measured weight into force using Newton’s law: F = m × g [N ]. We use a helical spring that becomes longer under load. This characteristic is linear, i.e. obeys Hooke’s law, only when stretched slightly. If a spring is overloaded, plastic deformations may occur making the spring non-linear with a consequent damage to the device. A mechanical system will be constructed to exert a tensional force at the spring element. This can be done by simply hanging the weight on a spring, or using a balancing arm. The later method will be utilized in our application since it provides a much greater versatility in terms of used component parameters, system analysis and system implementation. 3.3 EQUIPMENT 19 Equipment Dual variable DC power supply Prototyping breadboard with jump wires Multimeter Function Generator Oscilloscope Parts Helical spring Cord to attach components LM318 OP AMPs or equivalent Resistors Capacitors Miscellaneous paper mm scale glue stick soft wire weight reference (3x lock washer 39g) 3.4 LVDT Calibration & Linear Range 1. Use the function generator to drive the primary coil by 10kHz sine wave (50Ω impedance output). Turn up the amplitude to maximum, and measure the primary coil voltage using the oscilloscope (peak-to-peak). 2. Using the oscilloscope, measure the secondary coil voltages (waveforms) in open-circuit configuration. Expect these results based on the LVDT core position x: Pri amplitude Sec 2 Sec 1 20 1 0.8 0.6 0.4 0.2 0 −0.2 −0.4 −0.6 −0.8 −1 Secondary 1 Secondary 2 0 0.2 0.4 time 0.6 0.8 1 amplitude Sec 2 Pri Sec 1 1 0.8 0.6 0.4 0.2 0 −0.2 −0.4 −0.6 −0.8 −1 Secondary 1 Secondary 2 0 0.2 0.4 time 0.6 0.8 1 3. Measure the rectified outputs: 1 0.8 0.6 0.4 0.2 0 −0.2 −0.4 −0.6 −0.8 −1 Secondary 1 amplitude amplitude The waveforms below assume using half-wave rectifiers; the rectifier attached to the secondary coil 1 passes only positive polarity portion of the signal while the rectifier attached to the secondary coil 2 passes only negative polarity portion of the signal. Secondary 2 0 0.2 0.4 time 0.6 0.8 1 1 0.8 0.6 0.4 0.2 0 −0.2 −0.4 −0.6 −0.8 −1 Secondary 1 Secondary 2 0 0.2 0.4 time 0.6 0.8 1 1 0.8 0.6 0.4 0.2 0 −0.2 −0.4 −0.6 −0.8 −1 Secondary 1 amplitude amplitude The above waveforms are obtained when the secondary coil 1 and the secondary coil 2 signals are in phase. Secondary 2 0 0.2 0.4 time 0.6 0.8 1 1 0.8 0.6 0.4 0.2 0 −0.2 −0.4 −0.6 −0.8 −1 Secondary 1 Secondary 2 0 0.2 0.4 time 0.6 0.8 1 The above waveforms are obtained when the secondary coil 1 and the secondary coil 2 signals are 180◦ out of phase. 4. Measure DC voltage at the low-pass filter output in terms of the LVDT core position. Sketch the characteristic below: 21 5. Determine a linear range YLlin of your LVDT from the measured characteristic. 3.5 Spring Calibration & Linear Range 1. Measure the helical spring prolongation YS in terms of the applied loading force FS . 22 2. Determine the spring constant k (FS = k × YS ) from the measured characteristic above. 3. Determine the modulus of elasticity G of the spring material1 : G = where: G YS n F D d = = = = = = 8nkD3 8nF D3 = YS d4 d4 (1) modulus of elasticity [N/m2 ] spring deflection [m] number of coil turns [1] applied force [N ] mean coil diameter [m] wire diameter [m] 4. Determine the loading range FSlin and the deflection range YSlin obeying Hooke’s law by assuming the maximum allowable tensile stress σt = G/103 : 1 Ref: The New American Machinist’s Handbook, McGraw-Hill (1955) 23 πd3 σt 8D (2) 8nFSlin D3 Gd4 (3) FSlin = YSlin = 3.6 Balance Arm Ratio Determine the balance arm ratio assuming the maximum measured weight 0.5kg and the maximum spring loading FSlin : Xm FSlin = XS Fmax (4) L Xm Xs 11111111111111111111111111111111111111 00000000000000000000000000000000000000 00000000000000000000000000000000000000 11111111111111111111111111111111111111 00000000000000000000000000000000000000 11111111111111111111111111111111111111 00000000000000000000000000000000000000 11111111111111111111111111111111111111 00000000 11111111 00000000000000000000000000000000000000 11111111111111111111111111111111111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 Fmax 00000000 11111111 FSlin 00000000 11111111 000000000 111111111 00000000 11111111 000000000 111111111 00000000 11111111 000000000 111111111 00000000 11111111 000000000 111111111 00000000 11111111 000000000 111111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000000000000000000000000000000000 11111111111111111111111111111111111111 00000000 11111111 00000000000000000000000000000000000000 11111111111111111111111111111111111111 00000000000000000000000000000000000000 11111111111111111111111111111111111111 00000000000000000000000000000000000000 11111111111111111111111111111111111111 00000000000000000000000000000000000000 11111111111111111111111111111111111111 3.7 LVDT Arm Ratio Determine the LVDT arm ratio assuming the maximum spring extension YSlin and the LVDT linear range YLlin : XL YL = lin XS YSlin 24 (5) YL_lin YS_lin Xs Xm XL 11111111111111111111111111111111111111 00000000000000000000000000000000000000 00000000000000000000000000000000000000 11111111111111111111111111111111111111 00000000000000000000000000000000000000 11111111111111111111111111111111111111 00000000000000000000000000000000000000 11111111111111111111111111111111111111 00000000 11111111 00000000000000000000000000000000000000 11111111111111111111111111111111111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 FS_lin Fm 00000000 11111111 00000000 11111111 000000000 111111111 00000000 11111111 000000000 111111111 00000000 11111111 000000000 111111111 00000000 11111111 000000000 111111111 00000000 11111111 000000000 111111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000 11111111 00000000000000000000000000000000000000 11111111111111111111111111111111111111 00000000 11111111 00000000000000000000000000000000000000 11111111111111111111111111111111111111 00000000000000000000000000000000000000 11111111111111111111111111111111111111 00000000000000000000000000000000000000 11111111111111111111111111111111111111 00000000000000000000000000000000000000 11111111111111111111111111111111111111 3.8 Implementation Determine the arm lengths Xm , XS and XL using the following constraints: Case A: Pivot in Center In this case, the balancing arm is supported in the arm center as shown in the above figures: L/2 = M AX(Xm , XS , XL ) (6) Case B: Eccentric Pivot In this case, the balancing arm is not supported in the arm center: L = Xm + M AX(XS , XL ) (7) Using Eq. 4, Eq. 5, and Eq.6 or Eq.7, determine Xm and XL . Attach a hand drawn sketch or digital picture of your weight scale configuration that includes all the dimensions. 25 4 4.1 Offset and Span Adjustment OBJECTIVES In this lab, you will learn how to scale the LVDT output voltage to make it closely correspond to the measured weight. 4.2 BACKGROUND Offset and Span (Zero and Gain) adjustment offers the functionality to control an output characteristic of a linear measurement system to meet specific parameters such as passing through two given reference points. For example, in our particular application, we want a zero voltage output to represent a zero weight, and ±5V or ±0.5V output to represent 0.5kg weight limit. This way, we can simply connect an analog or digital voltmeter to the weight scale output and read the voltage as weight. The OFFSET adjustment sets the value of output when the input is zero, i.e. translates the input-output characteristic along the vertical axis; while SPAN adjustment changes the slope of this input-output relationship. A typical calibration procedure consists of these iterative steps: 1. The first calibration point should be selected close to the bottom of the input range. The offset adjustment is then used to give the required output signal for the input signal. 2. Because alteration of the span results in a higher output deviation at the top end of the input range it follows that the second calibration point should be at this top end. Thus the calibration at this point is achieved by imposing an input signal of suitable magnitude and adjusting the span potentiometer to give the correct output. 3. In practice it is sometimes difficult to eliminate the interaction effects between offset and span so it is recommended that the procedure for setting these two points be repeated until both points are obtained without the need for further adjustments. One objective of this lab will also be the development of a faster algorithm that removes the repetitive nature of the calibration method. 4.3 EQUIPMENT 26 Equipment Dual variable DC power supply Prototyping breadboard with jump wires Multimeter Spring Loaded Weight Scale Parts LM741 OP AMPs or equivalent Resistors Capacitors Potentiometers Miscellaneous Weight references (washers, etc.) 4.4 Analysis Three different circuits for Offset&Span adjustment are shown below. 1. Derive a static transfer function for each of them, i.e. Vout = Vout (VR , Vin , Ri , k), where k indicates the position of the pot’s wiper and ranges from -1 to 1. 2. Extract the offset and the gain. 3. What is the range of offset adjustment? 4.4.1 Example: Inverting Amplifier #2 R R3 3 Vout = − Vin + kVR R4 R1 R3 Vof = kVR R1 R3 G = R4 R3 Vof ∈ ± VR R1 10k Vof ∈ ± 15V 1M ∈ ±150mV 27 (8) (9) (10) (11) (12) (13) 4.5 Experiment 1. Implement the three circuits shown below allowing for 0.5 ∼ 2 gain and ±100mV offset. Note you will need another potentiometer in the op amp feedback loop for the gain adjustment. 2. Implement a forth circuit by modifying the Inverting Amplifier #2 such that the gain controlling potentiometer is placed in the forward path R4 . 3. Using only a multimeter, perform the offset and span adjustment to meet the following mapping: Input Signal Level 0.00V 5.00V 4.6 Output Signal Level -0.05V 6.00V Process Development & Selection 1. For each of the above circuits, using the analytical model and your experimental insight, develop a non-repetitive algorithm to adjust the circuit for the Offset&Span. 2. Compare the results and discuss the advantages and disadvantages. 3. Select one circuit that features the best performance for your LVDT based weight scale. 4. Implement this circuit to measure max 0.5kg weight using a multimeter. 5. Demonstrate your system to the instructor. 4.7 References • National Semiconductor: Application Note 31: Op Amp Circuit Collection (2002) • Maxim: Application Note 803: EPOT Applications: Offset Adjustment in Op-Amp Circuits (2001) 28 Figure 3: Inverting amplifier #1 Figure 4: Inverting amplifier #2 R1 ∼ 1000 × R3 //R4 Figure 5: Non-Inverting amplifier 29 R3 //R4 ≤ 10kΩ