1 Performance Measures

ECE 486 PERFORMANCE OF SECOND ORDER STEP RESPONSES Fall 08
Reading: FPE, Section 3.3–3.4
We have seen that the step response of a second order system with transfer function
H ( s ) = s 2
ω 2 n
+ 2 ζω n s + ω 2 n will have different characteristics, depending on the location of the poles (which are a function of the values
ζ and ω n
). We will now introduce some measures of performance for these step responses.
1 Performance Measures
We will be studying the following metrics in order to evaluate the performance of second order step responses.
• Rise time ( t r
): The time taken for the response to first get close to its final value. This is typically measured as the time taken for the response to go from 10% of its final value to 90% of its final value.
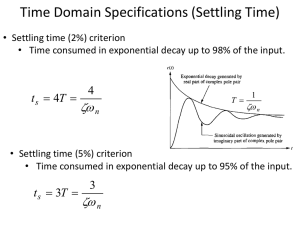
• Settling time ( t s
): The time taken for the response to stay close to its final value. We will take this to be the time after which the response stays within 5% of its final value. Other measures of
“closeness” can also be used (e.g., 1% instead of 5%, etc.).
• Overshoot ( M p
): This is the maximum amount that the response overshoots its final value, divided by the final value (often expressed as a percentage).
• Peak time ( t p
): This is the time at which the response hits its maximum value (this is the peak of the overshoot).
Figure 1: Step response of second order system, with t r
, M p
, t p and t s shown.
1.1
Rise time (
t r
)
An explicit formula for the rise time is somewhat hard to calculate. However, we note from the plot of step responses that the rise time stays relatively constant as ζ varies. Based on examining the average case
(with ζ = 0 .
5), one can obtain the approximation t r
≈
1 .
8
ω n
.
1.2
Overshoot (
M p
) and Peak time (
t p
)
Recall that the step response will have overshoot only if the poles are complex – this corresponds to the case 0 ≤ ζ < 1, and the corresponding system is called underdamped. The overshoot is defined as
M p
= y max − y ( ∞ ) y ( ∞ )
, where y max is the peak value of the step response, and y ( ∞ ) is the final (steady state) value of the step response.
We can explicitly calculate the peak value of the step response (and the corresponding time) as follows.
First, note that at the peak value, the derivative of the step response is zero. Recalling that the step response is given by y ( t ) = 1 − e −
σt
σ cos ω d t +
ω d sin ω d t , calculate dy dt and set it equal to zero to obtain
0 = dy dt
= σe −
σt (cos ω d t +
σ sin ω d t ) − e −
σt ( − ω d sin ω d t + σ cos ω d t )
ω d
=
σ
2
ω d e −
σt
σ 2
= (
ω d
+ ω sin d
ω d t + ω
) e −
σt sin d
ω e −
σt d t .
sin ω d t
From this, we obtain sin ω d t = 0, which occurs for t = 0 , peak time
π t p
=
ω d
π
ω d
,
2 π
ω d
, · · · . The first peak therefore occurs at the
.
Substituting this into the expression for y ( t ), we obtain the value of the step response at the peak to be
π y max = y (
ω d
) = 1 − e −
σ
π
ωd
= 1 + e −
σ
π
ωd
(cos π +
.
σ
ω d sin π )
Substituting y ( ∞ ) = 1, σ = ζω n
, ω d of overshoot, we obtain
= ω n p 1 − ζ 2 , and the above expression for y max into the definition
M p
1 + e −
σ
=
= e
−
1
πζ
√
1
−
ζ
2
π
ωd
.
− 1
= e
−
ζω n
ωn
π
√
1
−
ζ
2
2
1.3
Settling Time
The settling time t s is the time taken for the step response to stay within a certain percentage of its final value. This percentage will vary depending on the application. In this course, we will take 5% as a good measure. To calculate t s
, we note once again that the step response is y ( t ) = 1 − e −
σt
σ cos ω d t +
ω d sin ω d t .
We can obtain a rough approximation of t s by calculating the time at which the exponential term becomes equal to 0 .
05 (since the cosine and sine terms oscillate forever between two fixed values): e −
σt e −
σt s ≈ 0 .
05 ⇒ − σt s
≈ ln 0 .
05 ⇒ t s
≈
3
σ
3
=
ζω n
.
Summary.
The expressions for the various performance metrics are: t r
M p t p t s
1 .
8
≈
ω n
= e
− √
1
πζ
−
ζ
2
π
=
≈
ω n p
1 − ζ 2
3
.
ζω n
Note that the expressions for t r and t s are only approximations; more detailed expressions for these quantities can be obtained by performing a more careful analysis. The lab manual contains an example of these more detailed expressions. For our purposes, the above relationships will be sufficient to obtain intuition about the performance of second order systems. In particular, we note the following trends:
• As ω n increases (with ζ fixed), t r decreases, M p stays the same, t s decreases and t p decreases.
• As ζ increases (with ω n increases.
fixed), t r stays approximately constant, M p decreases, t s decreases and t p
We would typically like a small M p
, small t r and small t s
.
2 Choosing Pole Locations to Achieve Performance Specifications
As we will see later in the course, we can design a controller for a given system so that the overall closed loop transfer function has poles at any desired locations in the complex plane. We will need to choose these pole locations so that the step response of the system achieves certain performance specifications.
For example, suppose that we want the step response to have overshoot less than some value ¯ p
, rise time t r t s
. From the expressions given at the end of the previous section, these constraints on the step response can be translated into constraints on ζ and
ω n
: e
−
πζ
√
1
−
ζ
2
1 .
8
ω n
3
σ
≤
¯ p
⇒ Find upper bound for ζ from this.
≤
≤ t
¯ r
⇒ ω n
¯ s
⇒ σ ≥
1 .
8
≥
3 t s
¯ r
.
3
Noting that σ is the real part of the poles of the transfer function, ω n from the origin, and sin
−
1
ζ is the distance of the complex poles is the angle between the imaginary axis and the vector joining the origin to the pole, we can formulate appropriate regions in the complex plane for the pole locations in order to satisfy the given specifications.
Figure 2: Pole Locations in the Complex Plane. (a) Overshoot. (b) Rise time. (c) Settling time. (d)
Combined specifications.
Example.
We would like our second order system to have a step response with overshoot M p settling time t s
≤ 2. What is the region in the complex plane where the poles can be located?
Solution.
≤ 0 .
1 and
4