Second Order Systems: Time Response Analysis
advertisement

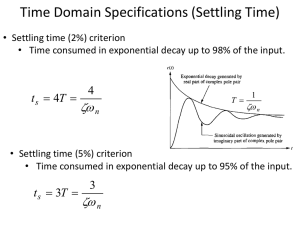
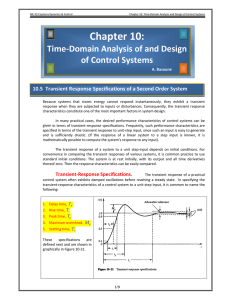
Time Response of Second Order Systems d 2 y(t ) dy(t ) = f (t ) − B − Ky(t ) 2 dt dt M (s 2Y (s) − sy(0) − y' (0)) = F (s) − B(sY (s) − y(0)) − KY (s) M Let y' (0) = 0 Ms2Y (s) + BsY (s) + KY (s) = Msy0 + By0 + F (s) Or F ( s) (Ms + B) y0 + 2 2 Ms + Bs + K Ms + Bs + K Consider the first term only: (s + B / M ) y0 (s + 2ςωn ) y0 = 2 Y ( s) = 2 s + ( B / M )s + K / M s + 2ςωn s + ωn 2 Y ( s) = ς = dimensionless damping ratio ωn = the natural frequency Where ωn = K ; M ς= B 2 KM 2 The characteristic equation s 2 + 2ςω n s + ω n has two roots : s1 = −ςω n + jω n 1 − ς 2 s2 = −ςω n − jω n 1 − ς 2 If ς > 1 ⇒ roots are real If ς < 1 ⇒ roots are complex (under damped) If ς = 1 ⇒ same roots and real (critically damped) For unit step response : 1 y (t ) = 1 − e −ςω nt sin( βω nt + θ ) β β β = 1 − ς 2 , θ = tan −1 ( ) = cos −1 ς ς Step response: y (t ) = 1 − 1 −ζω nt e sin(ω n βt + θ ) β β = 1 − ζ 2 , θ = cos −1 ζ where Showing the step response with different damping coefficients Standard Performance measures Performance measures are usually defined in terms of the step response of a system as below: Swiftness of the response is measured by rise time Tr , and peak time Tp For underdamped system, the Rise time Tr (0-100% rise time) is useful, For overdamped systems, the the Peak time is not defined, and the (10-90 % rise time) T is normally used r1 Peak time: T p Steady-state error: ess Settling time: T s Percent of Overshoot: P.O. = M pt − fv fv × 100 % is the peak value fv is the final value of the response M pt Percentage overshoot measures the closeness of the response to the desired response. The settling time T s is the time required for the system to settle within a certain percentage δ of the input amplitude. For second order system, we seek T s for which the response remains within 2% of the final value. This occurs approximately when: e −ζω nTs < 0.02 or : ζω nTs ≅ 4 Therefore : Ts ≅ 4τ = 4 ζω n Hence the settling time is defined as 4 time constants. Explicit relations for M pt and T p To find Tp we can either differentiate y(t) directly or indirectly through Laplace Transform of y’(t): Tp = π π = ωn β ωn 1− ς 2 The peak response is : M pt = 1 + e −ζπ / 1−ς 2 Percentage overshoot : P.O. = 100e −ζπ / 1−ς 2 : Impulse response of the second order system: Laplace transform of the unit impulse is R(s)=1 Y (s) = ω n2 + 2 ζω n s + ω 2 (s n ) Impulse response: Transient response for the impulse function, which is simply is the derivative of the response to the unit step: y (t ) = ω n − ζω e β nt sin( ω n β t ) Responses and pole locations 2 Time Responses and Pole Locations: 2 The characteristic equation s 2 + 2ςω n s + ω n has two roots : s1 = −ςω n + jω n 1 − ς 2 s2 = −ςω n − jω n 1 − ς 2 s1 , s2 are the poles. Ts ≅ 4τ = 4 ζω n Therefore the settling time is inversely proportional to the real part of the poles.