JPPS 202
Prog. Polym. Sci. 24 (1999) 1253–1403
Viscoelasticity and dynamics of entangled polymers
H. Watanabe*
Institute for Chemical Research, Kyoto University, Uji, Kyoto 611-0011, Japan
Received 17 June 1999; received in revised form 14 August 1999; accepted 20 August 1999
Abstract
This article gives a review of the entanglement dynamics of flexible polymer chains from theoretical and
experimental points of view. The global motion of the entangled chains determines viscoelastic, dielectric, and
diffusion properties in long time scales. The current tube models for this motion, incorporating the concepts of
reptation, contour length fluctuation, arm retraction, constraint release, and tube dilation, are summarized. A
summary is also made for extensive data for these properties. The model predictions are compared with those
data, and the validity and limitation of the models are discussed. In particular, the models are critically examined
for detailed dynamic features revealed from comparison of the viscoelastic and dielectric data (e.g. coherence in
the submolecule motion), and the theoretical, as well as experimental, challenges remaining for future work are
explained. q 2000 Elsevier Science Ltd. All rights reserved.
Keywords: Entanglements; Viscoelastic relaxation; Dielectric relaxation; Dipole-inverted type-A chains; Eigenfunction;
Reptation; Arm retraction; Constraint release; Dynamic tube dilation
Contents
1. Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1258
1.1. Background . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1258
1.2. Scope of this article . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1262
2. Molecular expressions of dynamic properties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1262
2.1. Coarse-grained chain . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1262
2.2. Expression of viscoelastic properties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1264
2.2.1. Stress expression . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1264
2.2.2. Nematic effects on stress . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1265
2.2.3. Role of coarse-graining in the stress expression . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1266
2.2.4. Expressions of material functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1267
2.2.4.1. Nonlinear quantities . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1267
* Corresponding author. Tel.: 181-77438-3135; fax: 181-77438-3139.
E-mail address: hiroshi@scl.kyoto-u.ac.jp (H. Watanabe).
0079-6700/00/$ - see front matter q 2000 Elsevier Science Ltd. All rights reserved.
PII: S0 0 7 9 - 6 7 0 0 ( 9 9 ) 0 0 02 9 - 5
1254
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
2.2.4.2. Linear quantities . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1268
2.3. Expression of dielectric properties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1269
2.3.1. General . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1269
2.3.2. Dielectric behavior of type-A chains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1270
2.3.3. Dynamic dielectric constant and dielectric loss . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1271
2.3.4. Comments for terminology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1273
2.4. Expression of diffusion properties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1273
3. Models of polymer dynamics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1274
3.1. Rouse model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1274
3.1.1. Viscoelastic properties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1276
3.1.2. Lack of intrinsic length scale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1277
3.1.3. Dielectric properties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1277
3.1.4. Diffusion properties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1277
3.2. Doi–Edwards model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1278
3.2.1. Model parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1278
3.2.2. Equilibrium dynamics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1279
3.2.3. Properties in the linear regime . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1280
3.2.3.1. Linear viscoelastic properties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1280
3.2.3.2. Dielectric properties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1281
3.2.3.3. Diffusion properties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1282
3.2.4. Non-equilibrium dynamics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1282
3.2.4.1. Nonlinear damping . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1282
3.2.4.2. Constitutive equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1285
3.3. Arm retraction models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1286
3.3.1. Fraction of surviving tube segments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1288
3.3.2. Equilibrium dynamics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1288
3.3.3. Linear viscoelastic and dielectric properties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1289
3.3.4. Diffusion properties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1290
3.3.5. Nonlinear damping . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1290
3.4. Contour length fluctuation models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1291
3.4.1. Equilibrium dynamics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1291
3.4.2. Linear viscoelastic and dielectric properties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1292
3.4.3. Diffusion properties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1292
3.5. Thermal constraint release models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1293
3.5.1. Thermal CR dynamics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1293
3.5.2. Comments for CR model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1295
3.6. Dynamic tube dilation models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1296
3.6.1. Tube dilation plus reptation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1296
3.6.1.1. General . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1296
3.6.1.2. Condition for DTD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1299
3.6.1.3. Marrucci model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1301
3.6.2. Tube dilation plus retraction/length fluctuation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1305
3.6.2.1. Ball–McLeish model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1306
3.6.2.2. Refined model for monodisperse star chains . . . . . . . . . . . . . . . . . . . . . . . . . 1308
3.6.2.3. Model for CLF of monodisperse linear chains . . . . . . . . . . . . . . . . . . . . . . . . 1309
3.7. Combination of tube motion and other dynamic modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1310
3.7.1. Combination of DTD with reptation/arm retraction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1310
3.7.2. Double reptation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1311
3.7.3. Combination of CR with reptation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1312
3.7.3.1. Models with independence assumption . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1312
3.7.3.2. Configuration-independent CR (CICR) model . . . . . . . . . . . . . . . . . . . . . . . . 1313
3.7.3.3. Configuration-dependent CR (CDCR) model . . . . . . . . . . . . . . . . . . . . . . . . 1314
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
3.8. Chain stretch and convective constraint release models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1316
3.8.1. Chain stretch models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1316
3.8.2. Convective constraint release (CCR) models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1318
3.8.2.1. Ianniruberto–Marrucci model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1318
3.8.2.2. Mead–Larson–Doi model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1318
3.9. Pom–pom models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1321
3.9.1. McLeish–Larson model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1322
3.9.1.1. Characteristic times . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1323
3.9.1.2. Stress expression . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1324
3.9.1.3. Chain dynamics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1325
3.9.1.4. Model prediction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1326
4. Linear viscoelastic and diffusion behavior . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1327
4.1. Monodisperse linear chains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1327
4.1.1. Viscoelastic behavior . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1327
4.1.2. Self-diffusion behavior . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1331
4.2. Monodisperse star chains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1333
4.2.1. Viscoelastic behavior . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1333
4.2.2. Diffusion behavior . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1336
4.3. Monodisperse pom–poms and combs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1337
4.3.1. Pom–poms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1337
4.3.2. Combs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1339
4.4. Blends . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1340
4.4.1. Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1340
4.4.2. Behavior of blends with y2 M2 . Mc0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1346
4.4.2.1. DTD criterion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1346
4.4.2.2. Description of G p data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1348
4.4.3. Behavior of blends with y2 M2 , Mc0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1350
4.4.3.1. General features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1350
4.4.3.2. Pure CR behavior . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1354
4.4.4. Comparison with CICR and CDCR models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1358
4.4.5. CR contribution to viscoelastic relaxation of monodisperse systems . . . . . . . . . . . . . . . 1360
5. Dielectric behavior . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1363
5.1. General . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1364
5.2. Monodisperse systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1365
5.2.1. Linear PI chains without dipole inversion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1365
5.2.1.1. Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1365
5.2.1.2. Mode distribution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1366
5.2.1.3. Relaxation time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1367
5.2.2. Linear PI chains with symmetrical dipole inversion . . . . . . . . . . . . . . . . . . . . . . . . . . . 1367
5.2.3. Star PI chains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1369
5.3. Blends . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1372
5.3.1. Linear PI probes with np =N 0 and 0.5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1373
5.3.1.1. Mode distribution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1373
5.3.1.2. Relaxation time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1374
5.3.1.3. Hypothetical monodisperse state . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1376
5.3.1.4. Comparison with models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1376
5.3.2. Linear PI probes with 0 , np =N , 0:5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1377
5.3.2.1. Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1377
5.3.2.2. CR contribution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1377
5.3.2.3. Eigenmodes of C n; t; n 0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1378
5.3.2.4. Comparison with models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1380
5.4. Comparison of dielectric and viscoelastic properties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1382
1255
1256
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
5.4.1. Test of tube dilation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1382
5.4.2. Coherence in the submolecule motion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1383
5.4.2.1. Equation of motion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1383
5.4.2.2. Dielectric properties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1384
5.4.2.3. Viscoelastic properties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1384
5.4.2.4. Comparison with data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1385
6. Nonlinear viscoelastic behavior . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1388
6.1. Damping behavior . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1388
6.1.1. Linear and star chains under single-step strain . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1388
6.1.2. Additional comments for h(g ) of linear and star chains . . . . . . . . . . . . . . . . . . . . . . . . 1390
6.1.3. Pom–pom chains under single-step strain . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1390
6.1.4. Linear chains under double-step strain . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1391
6.2. Shear-thinning behavior . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1392
6.2.1. Linear chains in steady state . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1392
6.2.2. Linear chains in transient state . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1394
6.3. Strain-hardening behavior . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1396
7. Concluding remarks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1398
Acknowledgements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1399
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1399
Nomenclature
Conformational variables
R(n,t) position vector of the n-th entanglement segment (or submolecule) at time t
u(n,t) bond-vector of the n-th entanglement segment (or submolecule) at time t
u~ s; t unit tangential vector of chain at curvi-linear coordinate s at time t
Averaged conformational properties
S(n,t) local configuration tensor at the n-th entanglement segment (or submolecule) defined by
Eq. (3)
S t
average orientation tensor of the chain defined by Eq. (82) (and Eq. (166))
l (t)
chain stretch ratio defined by Eq. (166)
S(n,t) orientation function at the n-th entanglement segment (or submolecule) defined by Eq.
(14)
d(n,t) root-mean-square displacement of the n-th entanglement segment (or submolecule) defined
by Eq. (32)
0
C(n,t;n ) local correlation function for the n-th and n 0 -th entanglement segments (or submolecules)
defined by Eq. (24)
eigenfunction of C(n,t;n 0 ) defined by Eq. (204)
fp(n)
Chain parameters
M
molecular weight of chain
m
number of monomers per chain (degree of polymerization)
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
b
z0
y i and
y pol
y
1257
effective step length of monomer
monomeric friction coefficient
Mi volume fraction and molecular weight of the i-th chain component in blends
total volume fraction of polymer components in plasticized blends
volume fraction of chains in solutions
Entanglement parameters
a
average size of entanglement segment (or submolecule)
z
friction coefficient of entanglement segment (or submolecule)
number of monomers per entanglement segment
me
molecular weight of entanglement segment: when necessary, the symbol Me0 is used for
Me
bulk systems in distinction from Me of solutions
characteristic molecular weight for appearance of entanglement effect for zero-shear
Mc
viscosity: when necessary, the symbol Mc0 is used for bulk systems in distinction from
Mc of solutions
Viscoelastic properties
s
stress tensor (or its anisotropic part when specified)
s
shear stress
first normal stress difference
N1
Linear properties
G(t)
relaxation modulus
entanglement plateau modulus
GN
m (t)
normalized relaxation modulus of entangled systems; m t G t=GN
G 0 v and G 00 v storage and loss modulus at angular frequency v
h 0 and Je zero-shear viscosity and steady state recoverable compliance
hp and t G,p intensity and characteristic time of the p-th viscoelastic relaxation mode defined by Eq.
(15): t G,p agrees with the relaxation time of the p-th eigenmode of S(n,t)
ktG lw and ktG ln second- and first-moment average viscoelastic relaxation times defined by Eq. (18)
Gp2;B v; h2;B and J2,B complex modulus, zero-shear viscosity, and steady state compliance of
component 2 in binary blends (method of evaluation given by Eqs. (194) and (195))
kt2;G lw second-moment average viscoelastic relaxation time of component 2 in binary blends
(definition and method of evaluation given by Eq. (196))
Nonlinear properties
G(t,g ) nonlinear relaxation modulus under step shear strain g
h(g ) shear damping function
h g_ non-Newtonian viscosity at shear rate g_
Dielectric properties
F (t) normalized dielectric relaxation function defined by Eq. (21)
1258
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
e 0 (v ) and e 00 (v ) dynamic dielectric constant and dielectric loss at angular frequency v
De
dielectric relaxation intensity for global motion of type-A chains
gp and t e ,p normalized intensity and characteristic time for the p-th dielectric mode defined by Eq.
(27): t e ,p agrees with the relaxation time of the p-th eigenmode of C(n,t;n 0 ).
kte lw and kte ln second- and first-moment average dielectric relaxation times defined by Eqs. (29)
and (30)
te;peak average dielectric relaxation time for e 00 peak defined by Eq. (31)
Diffusion properties
Ds and Dtr self diffusion and tracer diffusion coefficients
Model properties
t R,G
longest viscoelastic Rouse relaxation time (Eq. (41))
t R,e
longest dielectric Rouse relaxation time for chains having non-inverted type-A dipoles
(Eq. (46))
t rep
reptation time (Eq. (62))
t p(a) internal Rouse equilibration time for an entanglement segment (Eq. (56))
Dt p(a) time required for reptation over an entanglement segment size a (Eq. (57))
lifetime of an entanglement
tw
equilibrium contour length of entangled chain (Eq. (52))
Leq
w (t)
surviving fraction of non-dilated tube segments
w 0 (t) surviving fraction of dilated tube segments (schematically explained in Fig. 10)
Q(E) and Q IAA(E) Doi–Edwards universal orientation tensor (without and with IAA) defined by
Eqs. (77) and (81)
1. Introduction
1.1. Background
Dynamics of flexible polymer chains is one of the most interesting subjects in the field of polymer
science. At equilibrium, these chains take a wide variety of conformations to behave as random coils
because of a huge freedom in the spatial arrangements of the constituent units (monomers) therein.
Corresponding to this huge freedom, the flexible polymer chains dynamically exhibit various types of
motion according to the time and spatial scales of observation. In general, the fast dynamics corresponds
to the chain motion in small spatial scales, while the slow dynamics reflects the motion over large spatial
scales. The very local, rapid motion in the scales of chemical bonds (e.g., the bond vibration) is not
significantly different from that in low molecular weight (M) materials and is essentially determined by
the chemical structure of the chains. However, at larger scales, the polymer chains exhibit unique
dynamic features not found for the low-M materials. These features, corresponding to the motion in
scales well above the monomer size and strongly influenced by the chain connectivity, are very similar
for the polymer chains of various chemical structures. This universality (independence from the
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1259
chemical structure) allows us to coarse-grain the chains in both spatial and time scales to extract
essential physics of the large scale dynamics of polymer chains.
The motion of polymer chains is reflected in various kinds of dynamic properties, e.g. viscoelastic
(rheological), dielectric, and diffusion properties. Among these properties, the viscoelastic properties
seem to have been most extensively studied in these several decades. A comprehensive summary of
results of early studies is given in Ferry’s textbook [1] and Graessley’s review [2]. Those studies
revealed some important dynamic features of polymer chains to establish the corresponding molecular
concepts (including the universality explained above).
Probably, the fundamental features noticed at first were the viscoelastic memory effect of polymeric
liquids and the dependence of some viscoelastic quantities (e.g. zero-shear viscosity h 0) on the chain
molecular weight M. Under the recognition that the mechanical stress at long times is related to the
anisotropy in the chain conformation induced by the applied strain/flow, the viscoelasticity is related to
the chain motion that reduces this anisotropy and induces the stress relaxation. This stress–conformation
relationship, known as the stress–optical rule [3], enabled investigation of the chain motion through
viscoelastic quantities and contributed significantly to the developments of molecular concepts in the
polymer dynamics.
The universality in the slow viscoelastic relaxation of flexible chains stimulated developments of
molecular models for the chain motion at a coarse-grained level, for example, the bead-spring models
[4,5] in which the chain is divided into several units (submolecules) much larger than the monomer and
the motion of these units is described in terms of forces acting on the units. The bead-spring models were
developed for an isolated polymer chain and thus applicable to dilute polymer solutions. In these
solutions, the hydrodynamic interaction between the submolecules has significant effects on the chain
dynamics [5]. The first bead-spring model developed by Rouse [4], who did not incorporate this interaction in the model, is not applicable to actual dilute solutions. However, the Rouse model was found to
describe the viscoelastic behavior of short, linear chains in concentrated systems surprisingly well [2],
despite the fact that this model is formulated for the isolated chain, not for mutually overlapping chains
in these systems.
For long linear chains in concentrated systems, early experiments [1,2] revealed that the relaxation
modulus exhibits a plateau with M-independent height. This plateau extends to long times on an increase
of M, and the zero-shear viscosity h 0 correspondingly increases in proportion to M 3.5^0.2. These viscoelastic features indicate that the long linear chains have a group of slow viscoelastic relaxation modes
widely separated from fast modes; these separate slow modes have the M-independent relaxation
intensity reflected in the plateau height of the relaxation modulus, and their characteristic time increases
in proportion to M 3.5^0.2.
The above features, not found for short chains, is attributed to dynamic interactions between long
chains referred to as the entanglement [1,2]. Polymer chains cannot cross each other. The entanglement
of the mutually interpenetrating, flexible chains is naturally and unequivocally attributed to this
uncrossability. (The universality in the slow viscoelastic relaxation of long chains indicates that the
entanglement is related to the chain uncrossability, not to specific interactions (such as local attractions)
that change with the chemical structure of the chains.) Early experiments also revealed that some
viscoelastic features (e.g. M dependence of h 0) are quite different for well entangled linear and starbranched chains [6–10], the latter having linear arms bound at a branching point. This difference
demonstrated an importance of the chain ends on the slow dynamics of entangled chains.
In early theoretical studies, the chain was considered to drag surrounding chains to suffer an enhanced
1260
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
friction when it moved over a large distance. Under this molecular picture, the Rouse model was
modified to incorporate this enhanced friction for the large scale motion [1,2]. Some viscoelastic
features, e.g. the M 3.5^0.2 dependence of h 0, were explained by the simply modified Rouse model that
assumed an enhanced friction of submolecules above a critical size [2]. However, for entangled, monodisperse linear polymers, experiments indicated that the terminal relaxation intensity is insensitive to M.
This viscoelastic feature cannot be described by this simple model [2]. Thus the Rouse model was further
modified to incorporate an elastic coupling of the submolecules in addition to the enhanced friction
[11,12]. This class of modified Rouse models can describe the viscoelastic properties of entangled chains
if the coupling parameters are appropriately adjusted. However, the molecular meaning of these
parameters is not necessarily clear. In addition, these modified Rouse models cannot explain the differences between the linear and star chains unless additional assumptions are made for the parameters.
A breakthrough of this situation was brought by de Gennes [13] who proposed a totally different
molecular picture for the dynamics of entangled chains. For a linear chain trapped in a fixed (crosslinked) network, he considered that the large scale motion of the chain is limited in a direction of the
chain backbone because of the topological constraint from the network that disturbs the lateral chain
motion over distances larger than the network mesh size. The resulting curvi-linear diffusion along the
chain backbone is referred to as reptation.
Doi and Edwards [14–18] extended this reptation picture to polymer melts/solutions and developed a
model that enables consistent calculation of various dynamic properties of entangled linear chains at
equilibrium as well as under large strains/fast flow. The chains in the entangled melts/solutions form a
dynamical mesh to mutually constrain their large scale motion. For a given chain (probe) in this mesh,
the Doi–Edwards (DE) model assumes that the large scale motion is constrained in a tube-like region
surrounding the probe backbone and this constraint survives (i.e. the tube is fixed in space) in a time
scale of the probe relaxation. For this motion at equilibrium, the DE model introduces a further approximation that the probe contour length measured along the tube axis does not fluctuate with time. For this
case, reptation is the only possible large scale motion of the probe; this motion is described in terms of a
few, well defined molecular parameters and all dynamic quantities corresponding to this motion, i.e.
those in the linear response regime, are readily calculated. Under large strains/fast flow, the probe has
largely distorted conformations and exhibits non-equilibrium motion. The DE model also enables
calculation of the corresponding nonlinear dynamic properties under some approximations [15–18].
The tube concept was applied also to entangled star polymers [19–21]. In the bead-spring model, the
branching point for the star arms affects the degeneracy in the eigenmodes of the chain motion but raises
no essential difference in the chain dynamics (and thus the M dependence of h 0 is the same for the star
[22] and linear [4] chains). In contrast, in the tube model for entangled chains, the branching point
changes the chain dynamics: This point is assumed to be fixed in space thereby prohibiting the reptation
of the star-arms. Consequently, the model considers that the arm motion in the tube is associated with
changes in its contour length (arm retraction). The viscoelastic features of the star chains corresponding
to this retraction are quite different from the features of the reptating linear chains; for example, h 0 of the
star increases exponentially with M and this M dependence is much stronger than that for the linear
chains [20,21].
The above, early versions of the tube models stimulated, either explicitly or implicitly, extensive
experimental studies of various dynamic properties of entangled chains [23–124]. For some properties,
e.g. the damping function of both linear and star chains under step strains [86–93], good agreements
were found between the data and the tube model predictions. For the star chains, the Pearson–Helfand
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1261
(PH) model [21] considering the arm retraction was found to quantitatively describe the linear viscoelastic moduli G p. However, non-trivial differences were also observed for a wide variety of properties:
For example, the observed h 0 of linear chains is proportional to M 3.5^0.2 while the DE model predicts
h0 / M 3 : For the star chain, the model parameter value giving the excellent description of the G p data
was considerably different from the value intrinsically deduced from the model. (In other words, the
excellent agreement with the data was obtained after an adjustment of this parameter.)
Considering these discrepancies between the data and predictions of the early versions of the tube
models, theoretical studies have been made extensively [125–166]. Some theories were proposed to
describe the chain dynamics by incorporating fundamental interactions between the chains in the
Langevin equation, without introducing/using the tube concept in an a priori way [128–132].
Theoretical efforts were also made to generalize the tube model by preserving the tube concept itself
[133–166]: Extra mechanisms of large scale chain motion not considered in the earlier models, the
contour length fluctuation (CLF) of the chain trapped in the tube and the tube motion that allows a large
scale lateral motion of the chain, were incorporated in the model.
The CLF concept [133–135] was naturally incorporated in the DE model that originally considered a
flexible probe chain (Rouse chain) constrained in the tube. The latter concept of tube motion [135,138–
140] was also naturally introduced for the chains in entangled melts/solutions because the chains
entangling with a given probe chain can exhibit the motion equivalent to the probe motion; for example,
if a linear probe chain in monodisperse systems reptates in its tube, the surrounding (tube-forming)
chains equivalent to the probe should also reptate in their own tubes to induce, in principle, the motion of
the tube for the probe.
The tube motion has two important effects on the probe dynamics. The tube motion allows large scale
motion of the probe in a direction lateral to its backbone to induce the probe relaxation [135,138–140].
We refer to this type of probe relaxation as the constraint release (CR) relaxation. The tube motion also
increases an effective tube diameter (effective entanglement mesh size) for the probe in a coarse-grained
time scale, i.e. on an increase of a unit time of our observation (below which the probe motion is
averaged). This concept [141,153] is referred to as dynamic tube dilation (DTD).
In relation to the above modifications of the tube model, some experiments have been conducted with
specific approaches. Models considering the CR and DTD mechanisms were tested for blends of
monodisperse chains of different M [26,27,68–85,101,113]. The models describe reasonably well the
blend data. However, detailed features of these mechanisms, e.g. the viscoelastic mode distribution of
the CR relaxation, are different from those considered in the models, demonstrating some problems to be
further investigated theoretically.
In time scales shorter than the longest relaxation time, the reptation dynamics leads to correlated
(coherent) motion of different portions in a given chain. Focusing this feature, some experimental studies
utilized various kinds of labeling techniques to detect the motion of particular portions in the chain
[39,61,62,65,115]. These studies revealed several characteristic features of entangled chains, e.g. faster
relaxation of chain ends compared to the chain center.
The tube model predicts different types of dynamics for chains having different topological structures.
Experimental studies focusing this point have been conducted for anionically synthesized model polymers having various structures, e.g. star [6–10,49–51], ring [52–55], H-shape [59], comb [56–58],
pom–pom [60] (a linear trunk having several arms at two ends; H-polymer is classified as the pom–pom
having two arms at each end of the trunk). These studies confirmed the changes in the dynamics with the
topological structure.
1262
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
Finally, some studies compared different dynamic properties, e.g., viscoelastic, dielectric, and diffusion properties [36,38,100,119,122]. Since these properties reflect differently the same motion of the
chain, the comparison revealed fundamental features of the entanglement dynamics, e.g. the coherence
in the chain motion enhanced by the entanglement [122], that cannot be deduced from any single
property.
1.2. Scope of this article
The extensive studies explained above have brought significant progresses in our understanding of the
entanglement dynamics. This article attempts to explain the current level of understanding and address
the remaining problems, from both experimental and theoretical aspects.
It is practically impossible to explain all dynamic features of entangled polymers revealed in those
studies. This article focuses on viscoelastic, dielectric, and diffusion properties, in particular the first
two, and attempts to explain, from the author’s view point, progresses in our understanding of these
properties and the chain dynamics. Section 2 summarizes general relationships between the chain
conformation and those properties. Section 3 gives a summary of some models describing the chain
motion, i.e. changes in the chain conformation/position with time. Dynamic properties are calculated
from these changes through the conformation–property relationships given in Section 2. In Sections 4
and 5, respectively, experimental facts and current molecular pictures are explained for linear viscoelastic and dielectric properties, both reflecting the equilibrium chain motion. Section 4 includes a brief
explanation of the diffusion properties, and Section 5 discusses details of the chain dynamics deduced
from comparison of the viscoelastic and dielectric properties. Section 6 briefly explains nonlinear
viscoelastic features that reflect non-equilibrium chain motion under large strains/fast flow. Finally,
Section 7 gives a summary of this article and addresses the problems to be elucidated in future work.
2. Molecular expressions of dynamic properties
2.1. Coarse-grained chain
We consider a linear polymer chain composed of m monomers in concentrated systems. (In this
article, the symbol, m, is exclusively used to represent the monomer number.) The excluded volume
effect is negligibly small in these systems, and the chain has the Gaussian conformation in large spatial
scales.
Taking advantage of the universality in the slow dynamic properties explained in Section 1, we can
examine these properties for a coarse-grained chain that is obtained by dividing the real chain into N
submolecules each containing g ( m/N) monomers (cf. Fig. 1a); g is chosen to be sufficiently small so
that the coarse-grained chain has a large freedom in its conformation. At the same time, g is chosen to be
sufficiently large so that the coarse-grained chain has the Gaussian nature [18]
a2
d 0I
ku n; tu n ; tl
3 nn
0
at equilibrium
1
Here, u(n,t) is the bond-vector (end-to-end vector) of the n-th submolecule at a time t (cf. Fig. 1a), d nn 0 is
the Kronecker delta, and I is a unit tensor (having the components d ij). The dyadic ku n; tu n 0 ; tl
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1263
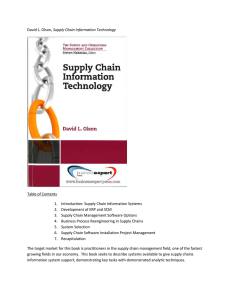
Fig. 1. Schematic illustration of the real and coarse-grained chains. In part a, the small beads connected by rods indicate
monomeric segments, and the dotted circles represent the submolecules of the coarse-grained chain. Part b shows a hypothetical
photograph of the real chain taken with a certain exposure time.
measures the isochronal orientational correlation of two submolecules. The average size of the submolecule at equilibrium, a (cf. Eq. (1)), is related to the effective step length of the monomer, b, as
a2 gb2
2
Dividing the real chain into the submolecules, we actually coarse-grain the chain in both spatial and
time scales. This can be noted from a hypothetical experiment of taking a photograph of the real chain
with an exposure time t0. An example of this photograph is shown in Fig. 1b. For large t0, the chain looks
like a fuzzy thread (with a width at q b) because of the chain motion in the interval of time t0. This
motion and the local conformation in the spatial scale ,at are averaged in the photograph, and the
successively taken photographs (with the exposure time t0 for each) represent the chain motion in the
spatial and time scales larger than at and t0, respectively. (Examples of this motion are later shown in
Figs. 8 and 9.)
The coarse-grained chain is a discretized representation of this fuzzy thread. In each submolecule, the
monomer positions (local conformations) are equilibrated within a certain characteristic time t p. This t p
and the submolecule size a correspond to t0 and at of the fuzzy thread, and the static and dynamic
properties of the coarse-grained chain coincides with those of the real chain in the spatial scale .a and
1264
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
time scale .t p. Thus, once we fix the unit time of our observation, tob, we can use any coarse-grained
chain having tp # tob to examine the dynamic features of the real chain in the time scale $ tob :
This coarse-grained chain, utilized throughout this article, is hereafter referred to as the “chain” unless
its coarse-grained nature is to be emphasized. The dynamic properties of our interest are expressed in
terms of structural quantities of the chain, u(n,t) and/or the position R(n,t) of the n-th submolecule at the
time t (cf. Fig. 1). These expressions, summarized below, are the same for the chains of various
topological structures, e.g. linear, star, H-shaped, etc. (except that the dipole arrangements determining
the dielectric properties are not necessarily the same for those chains).
2.2. Expression of viscoelastic properties
2.2.1. Stress expression
The proportionality between the mechanical stress and optical anisotropy, known as the stress–optical
rule, is well established from extensive experiments for concentrated, homogeneous polymeric liquids
both in the linear and nonlinear viscoelastic regimes [3]. The optical anisotropy detects a non-isotropic
orientation of chemical bonds in the real chain and thus corresponds to the orientational anisotropy of the
submolecules in the (coarse-grained) chain.
Here, we consider a general, polydisperse system in which the number density of a chain composed of
Na submolecules is given by n a .The isochronal orientational anisotropy of the bond vector ua(n,t) of the
n-th submolecule in the a -th chain is represented by a local configuration tensor
ua n; tua n; t
Sa n; t
3
gb2
where the ensemble average k· · ·l is taken for the n a chains having the same submolecule number Na .
The stress–optical rule allows us to express the stress tensor s in terms of this Sa (n,t) as
s t 3kB T
X
a
na
Na
X
Sa n; t 2 pI
4
n1
Here, p is the isotropic pressure, kB the Boltzmann constant, and T the absolute temperature.
Some explanations need to be added for Eqs. (3) and (4). In Eq. (3), we have included the factor gb 2 in
the average so that Eq. (3) can be utilized in the stress expression (Eq. (4)) even in the nonlinear regime
where the number g of the monomers per submolecule may change under large strain/fast flow [18]. In
Eq. (4), we have utilized the intensity factor 3kBT derived from the classical theory of rubber elasticity
[18] (in which the orientation anisotropy enhances a microscopic stress (due to the chain tension) in a
particular direction to raise the macroscopically observed stress). This factor may be modified according
to intra- and inter-chain interactions not considered in the theory. However, for homogeneous polymeric
liquids, the stress–optical rule guarantees the linearity between s and S (expressed in the form of Eq.
(4)) irrespective of these interactions.
Under large strains/fast flow, the chains are not only orientated but also stretched significantly. For
some cases, it is convenient to separately describe the contributions of the orientation and stretching to
the stress. For this purpose, we can introduce a unit vector u~ a n; t ua n; t=uua n; tu and a stretch ratio
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1265
la n; t kuua n; tu=g1=2 bl and rewrite Eqs. (3) and (4), after a decoupling approximation, as
S 0a n; t ku~ a n; tu~ a n; tl 2
I
3
5
and
s t 3kB T
X
a
na
Na
X
la n; t2 S 0a n; t 2 pI
6
n1
The tensor S 0 , referred to as the (local) orientation tensor, purely describes the orientational anisotropy.
In the linear viscoelastic regime, l 1 and Eq. (6) reduces to Eq. (4).
In principle, S 0 and l relax in a synchronized way. However, we may separately discuss the relaxation
processes of these quantities if the processes have widely separated characteristic times. This separate
discussion sometimes simplifies the molecular picture of viscoelastic relaxation, as explained later in
Section 3.8.
2.2.2. Nematic effects on stress
Concerning the linearity between s and S, we have to add a few comments about results of rheooptical studies [61,64] for a labeled probe chain in concentrated systems. These studies revealed an
orientational coupling between the probe and matrix chains: In a matrix of orientated chains much longer
than the probe, the probe preserves its optical anisotropy coupled with the matrix anisotropy even when
the probe fully relaxes to raise no stress. This coupling is attributed to a nematic interaction between the
probe and matrix [167–170]; namely, the probe is equilibrated (most stabilized) when it is orientated to
some extent in the direction of the matrix orientation.
From the above results, one might doubt the validity of Eq. (4). However, the experiments [3] (that
established the stress–optical rule) as well as theoretical analyses [168–170] indicate that the orientational coupling does not affect the proportionality between the stress and the total optical anisotropy
contributed from all chains in the system, ensuring the validity of Eq. (4).
In monodisperse systems, the stress and optical anisotropy of individual chains are simply given by
those of the whole system divided by the chain number density, meaning that the stress–optical rule
holds for individual chains. On the other hand, in blends of monodisperse components, this rule holds for
the blend as a whole but not for each component because of the orientational coupling. Thus the stress of
the a -th chain in blends, sa , is not proportional to the local configuration tensor Sa (Eq. (3)) if this
tensor is defined for real chemical bonds and faithfully represents the optically detected anisotropy of the
bond orientation. However, for the coarse-grained chain composed of Gaussian submolecules, theoretical analyses [168–170] indicated that the nematic interaction (occurring at length scales of the chemical bonds) has no significant effects on the slow dynamics in the linear viscoelastic regime and the
orientational coupling is negligible for large submolecules. Thus, for description of the slow dynamics of
the coarse-grained chains in the linear regime, we can safely express the stress tensor of the a -th chain in
terms of the local configuration tensor S of the submolecules as
sa t 3na kB T
Na
X
Sa n; t
1isotropic terms
n1
This stress expression is valid for both monodisperse and polydisperse systems.
7
1266
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
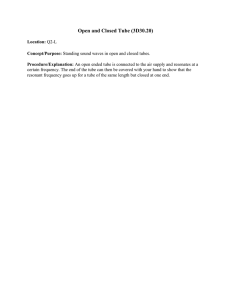
Fig. 2. Schematic illustration indicating combination of submolecules into a larger submolecule.
2.2.3. Role of coarse-graining in the stress expression
The stress calculated from Eqs. (4) and (7) is formally dependent on the choice of the submolecule
(choice of N), and one might consider this dependence as a deficiency (non-definiteness) of the models
utilizing the coarse-grained chain. However, the formal dependence is related to magnitudes of the
coarse-graining: There is no real difference of the stresses calculated for submolecules of different sizes,
as explained below.
We consider successive b submolecules in a chain (cf. Fig. 2) and calculate the stress at a unit time of
our observation, tob. Each submolecule includes g monomers that are equilibrated within tob. Now, we
allow the bond-vectors of the submolecules, u(n,t) n 1; 2; …; b; to equilibrate under a constraint that
their sum, u 0 , is kept constant. If a characteristic time t p of this equilibration is smaller than tob, u(n,tob)
can be generally written as
u n; tob u 0 =b 1 v n; tob
8
where v is an isotropically distributed random vector uncorrelated with u 0 . Then, the stress for the
ensemble of the b submolecules is given by (cf. Eqs. (4) and (7))
* 0 0 +
b X
u n; tob u n; tob
uu
1 isotropic terms
9
s 3kB T
3kB T
2
bgb2
gb
n1
The anisotropic part of this stress is identical to that calculated for an enlarged submolecule including gb
monomers and having an average size a 0 b1=2 a: Namely, the mutually equilibrated b submolecules
behave as an enlarged, stress-generating unit as a whole.
The above result demonstrates that the calculation of the stress is not affected by the choice of the
submolecule if the chosen submolecule is internally equilibrated within tob. In other words, all coarsegrained chains composed of submolecules having tp # tob exhibit the same stress at t $ tob : (This result
reflects the intimate link between the coarse-graining of the spatial and time scales explained in Section 2.1.)
For a given submolecule, t p may change with the type of chain dynamics. Considering this point, we
can (and sometimes have to) change the submolecule size for a simple description of the dynamics. This
change becomes essential when we consider the dynamic tube dilation mechanism within the context of
the generalized tube model, as explained later in Section 3.6.
This article examines the chain dynamics in long time scales where our stress expression (Eqs. (4) and
(7)) is valid. However, in relation to the above effect of the internal equilibration on the stress, it would
be informative to see how Eqs. (4) and (7) fail for fast dynamics, i.e. in a time scale ts of so-called
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1267
segmental motion. The submolecule equilibrated within ts includes only a small number of monomers
and exhibits no Gaussian feature, meaning that Eqs. (4) and (7) for the Gaussian submolecules should be
modified (at least for the prefactor, kBT). More importantly, in the time scale of ts, the rotation (or
wiggling) of the monomer around the chain backbone is not fully equilibrated and the monomer is
regarded as a disk-like (planar) object because of asymmetries in the side groups attached to the backbone atoms. An orientational anisotropy of the normal of this disk as well as distortion of atomic packing
significantly contribute to the stress in this time scale and overwhelm the stress given by Eqs. (4) and (7)
(after the above modification). Details of these contributions, that are dependent on the chemical
structure of the monomer and beyond the scope of this article, can be found in the papers by Inoue et
al. [171–173].
2.2.4. Expressions of material functions
In general, viscoelastic behavior is examined for material functions (e.g. viscosity), not for the stress
itself. For general cases of polydisperse systems having the number density n a for chains composed of
Na submolecules, the molecular expressions of the material functions discussed in this article are
summarized below. Since this article focuses dynamic properties of concentrated polymeric liquids, a
contribution of low molecular weight solvents is not considered in these expressions.
2.2.4.1. Nonlinear quantities Polymer chains exhibit nonlinearities in their viscoelastic properties
(material functions) due to their non-equilibrium motion under large strain/fast flow. In principle,
these properties are consistently described in terms of the strain history through a constitutive equation.
However, the equation valid for all polymeric liquids has not been established in the nonlinear regime.
Thus, for most cases, the nonlinear properties have been examined separately according to the type of
strain (e.g. shear/elongation).
For polymeric liquids, most experiments have been conducted under shear. Hereafter, the x- and ydirections are chosen as the shear and shear-gradient directions. The relaxation of the shear stress
s t; g sxy after imposition of a step strain g at t 0 is characterized by the nonlinear shear
relaxation modulus G(t,g )
G t; g s t; g=g
10
The growth of s (t;g ) after start-up of a constant rate g_ shear flow is specified by a nonlinear viscosity–
growth function
h1 t; g_ s t; g_ =g_
11
The non-Newtonian viscosity h g_ is defined as h1 ∞; g_ : Utilizing Eq. (4) (or Eq. (6)), we can express
s (t;g ) in terms of the submolecule bond vector u to discuss the nonlinearities of G(t,g ) and h1 t; g_ in
relation to the non-equilibrium chain motion under large strains/fast flow.
Recently, nonlinear behavior under uniaxial elongational flow is actively investigated. After start-up
of this flow in the z-direction at a constant Henckey strain rate e_ ; the tensile stress sE t; e_ szz grows
with t. This behavior is characterized by an elongational viscosity–growth function
*
+
Na
2
2
X
X
_
u
n;
t
2
u
n;
t
s
t;
e
3k
T
E
a;z
a;x
12
h1
B
na
E t; e_
2
e_
e_
gb
a
n1
1268
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
This expression of h1
E ; in terms of the bond vector components ua;j with j x and z, is obtained from
Eq. (4) under a stress-free condition in the x-direction sxx 0: The non-Newtonian elongational
viscosity, hE e_ ; is defined as h1
E ∞; e_ :
2.2.4.2. Linear quantities Under small strains/slow flow, the chain exhibits the equilibrium motion and
linear viscoelastic responses prevail. A general constitutive equation based on the Boltzmann superposition principle holds in the linear regime [1]. Thus the linear viscoelastic behavior is specified by a
single material function, e.g., the linear shear relaxation modulus (cf. Eq. (10))
G t ; G t; gg!0
Na
3kB T X X
na
Sa n; t
g a
n1
13
with
Sa n; t
1
kua;x n; tua;y n; tl
a2
14
Here, the orientation function Sa is a shear component of the configuration and orientation tensors Sa
and S 0 a (Eqs. (3) and (5); S 0a Sa in the linear regime). Since the submolecules are negligibly stretched
in the linear regime, we have separated the factor a 22 ( g 21b 22 in Eq. (3)) from the average kuul in Eq.
(14). From G(t)Rgiven by Eq. (13), all other linear viscoelastic quantities are readily calculated; for
example, h0 ∞
0 G t dt:
Flexible chains have a huge freedom in their conformation. Consequently, these chains have a
distribution of the orientational relaxation modes of S. This distribution raises a viscoelastic mode
distribution of G(t) that is conveniently represented as [1,2]
Z∞
X
hp exp2t=tG;p
H t exp2t=t dln t
15
G t
2∞
p
Here, hp and t G,p are the intensity and characteristic time for the p-th viscoelastic relaxation mode. (The
first subscript “G” for t indicates that t G,p is the viscoelastic time.) Following the tradition in polymer
rheology, we number the relaxation modes with an decreasing order of their characteristic times tG;1 .
tG;2 . tG;3 …: The quantity H(t ) in Eq. (15), referred to as the viscoelastic relaxation spectrum [1,2],
gives an continuous expression of the mode intensity distribution. In all viscoelastic expressions
P
t
)
can
be
used
instead
of
h
after
the
replacements,
t
!
t
and
explained
below,
H(
p
G;p
p !
R∞
…
dln t [1,2].
2∞
The linear viscoelastic behavior is most frequently examined for the dynamic storage and loss moduli
G 0 (v ) and G 00 (v ) against oscillatory strain at an angular frequency v . These moduli are related to G(t)
through the Fourier transformation [1]. Considering the above mode distribution of G(t), we can express
G 0 and G 00 in terms of hp and t G,p as
G 0 v v2
X
p
hp
tG;p 2
;
1 1 v2 tG;p 2
G 00 v v
X
p
hp
tG;p
1 1 v2 tG;p 2
16
Thus G 0 and G 00 exhibit the terminal behavior, G 0 / v2 and G 00 / v at v well below tG;1 21 : The zeroshear viscosity h 0 G 00 =vv!0 and the steady state compliance Je G 0 = G 00 2 v!0 ; characterizing
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
this terminal behavior, are expressed in terms of hp and t G,p
X
tG;p 2 hp
X
p
h0
tG;p hp ;
J e X
2
tG;p hp
p
1269
17
p
As noted from this expression, Je is very sensitive to slow relaxation modes (having large t G,p).
From Eq. (17), we can define two types of average relaxation times [2]
X
X
tG;p 2 hp
tG;p hp
p
X
ktG lw ; Je h0
tG;p hp
;
ktG ln ; h0 =GN
p
p
X
hp
18
p
0
Here, GN G ∞ is the high-v plateau modulus; for entangled polymers, the rubbery plateau
modulus is used as GN. The second-moment relaxation time ktG lw is an average of t G,p with a weighing
factor t G,php. This factor enhances the contribution of slow modes to ktG lw and thus ktG lw is usually
close to the longest relaxation time t G,1. On the other hand, the first-moment relaxation time ktG ln has the
weighing factor hp and is shorter than ktG lw : A product of Je and GN, that coincides with a ktG lw =ktG ln
ratio, gives a measure of a width of the relaxation mode distribution [2]
X X
hp
tG;p 2 hp
p
Je GN
X
p
tG;p hp
2
19
p
(Je GN 1 for the single mode relaxation and JeGN . 1 under the presence of the mode distribution).
2.3. Expression of dielectric properties
2.3.1. General
Under an electric field E, electrical dipoles of molecules are orientated in the direction of E to change
the polarization of the system P. This dipole orientation occurs via the motion of the molecules,
allowing us to dielectrically observe this motion though the time-evolution of P. The molecular motion
is not affected by the electric field if the field intensity is sufficiently small. The linear dielectric
responses observed for this case reflect the equilibrium motion.
In this article, we limit ourselves to these linear responses due to dipole orientation in relatively long
time scales. (Very rapid responses due to atomic/electronic polarization are not considered.) Then, the
polarization P is given by a sum of all dipoles m in a unit volume
X
mj t
20
P t
j
For homogeneous materials, a normalized dielectric relaxation function F (t) is defined as an autocorrelation of this P at equilibrium [174]
kP t·P 0l
F t
21
kP2 l
This F (t) specifies all dielectric features in the long time scales of our interest.
1270
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
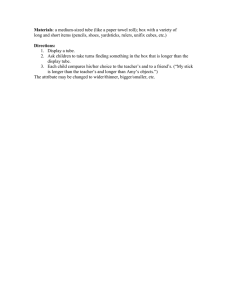
Fig. 3. Schematic illustration of a linear type-A chain. Thin long arrows indicate the bond vectors of the submolecules, and thick
short arrows denote the sum of the type-A dipoles in each submolecule.
2.3.2. Dielectric behavior of type-A chains
According to Stockmayer [175], the dipoles of flexible polymer chains are classified into three types,
the type-A and type-B dipoles attached to the chain backbone and type-C dipoles attached to the side
chain groups. The type-A and type-B dipoles are parallel and perpendicular to the chain backbone,
respectively.
The motion of side chain groups induces the dielectric relaxation if the chains have the type-C dipoles.
For chains having type-B dipoles, the local motion of their backbone (related to the glass transition)
results in the dielectric relaxation often referred to as a -dispersion. The spatial and time scales of these
relaxation processes are much smaller than those of our interest. On the other hand, the global motion of
the chain backbone, the motion focused in this article, results in the slow dielectric dispersion if the
chains have the type-A dipoles that are aligned in the same direction along the backbone over many
successive monomers. This type of chain is hereafter referred to as the type-A chain. Some polymers
having no symmetrical center in their chemical structures, e.g. cis-polyisoprene and poly(propylene
oxide), are classified as type-A chains [102].
In this article, we focus the slow dielectric relaxation of the type-A chains and do not consider the
much faster relaxation due to the type-B and type-C dipoles. We coarse-grain the chain, i.e. subdivide it
into the Gaussian submolecules. For monodisperse type-A chains each composed of N submolecules,
molecular expressions of the dielectric properties are summarized below. (These expressions can be
easily extended to general cases of polydisperse chains.)
For these systems, the polarization P(t) (Eq. (20)) is written in terms of the bond-vector u of the
submolecules as
P t m~
N
XX
a n1
q nua n; t
22
where m~ is a magnitude of the type-A dipoles reduced to unit length of u, and a is an index specifying
the chain. In Eq. (22), we have assumed that all chains have the same arrangements of the type-A dipoles
of the monomers and that the dipoles in each submolecule are aligned in the same direction along the
chain backbone. A vectorial sum msum of these dipoles, shown in Fig. 3 with short thick arrows, is either
parallel or anti-parallel to the end-to-end vector u of the submolecule (long thin arrows). The parameter
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1271
q n in Eq. (22) specifies this direction of msum: q n 1 (or 21) if msum is parallel (or anti-parallel) to u
for the n-th submolecule.
Comparing Eqs. (21) and (22), we note that the dielectric relaxation function F (t) includes crosscorrelations of different chains, kua n; t·ub n 0 ; 0l with a ± b: However, for chains like cis-polyisoprene having only small type-A dipoles, we may safely neglect these cross-correlations for the following
reason. Since the dipole–dipole interaction energy of these chains is negligibly small (compared to the
thermal energy kBT), the n 0 -th submolecule of the b -th chain take two opposite configurations, ub n 0 ; 0
and 2ub n 0 ; 0; with the same probabilities for a given configuration of the n-th submolecule of the a chain, ua (n,t). Thus the cross-correlation terms vanish when summed over all chains, i.e.
P
0
b ± a kua n; t·ub n ; 0l 0:
From the above argument, F (t) is written in terms of the auto-correlation of respective chains
F t
N X
N
1 X
q nq n 0 C n; t; n 0
N n1 n 0 1
F 0 1
23
with
C n; t; n 0
1
ku n; t·u n 0 ; 0l
a2
24
Here, k· · ·l indicates an equilibrium average. (The normalization constant, N 21 in Eq. (23), is obtained
from the Gaussian nature of the submolecules, Eq. (1).)
The quantity C n; t; n 0 ; referred to as a local correlation function, specifies the orientational
correlation of two submolecules in the same chain at times t and 0. The global chain motion results
in a decay of the orientational memory to decrease the C value. This leads to the dielectric relaxation
(decay of F ; cf. Eq. (23)). Description of this behavior is not affected by the choice of the submolecules,
in a sense similar to that explained in Section 2.2.3.
Eqs. (23) and (24) give the fundamental conformation–property relationship in the dielectric
phenomena of type-A chains. In this sense, Eqs. (23) and (24) are analogous to Eqs. (13) and (14) for
the viscoelastic phenomena. However, we also note an important difference: The orientation function S
(Eq. (14)) represents the isochronal orientational anisotropy while the local correlation function C
(Eq. (24)) reflects the orientational correlation at two different times (t and 0). Thus the same equilibrium
motion of type-A chains is differently reflected in the linear viscoelastic and dielectric properties. This
difference enables us to experimentally specify some detailed features of the chain dynamics, as
explained later in Section 5.4.
2.3.3. Dynamic dielectric constant and dielectric loss
In general, the dielectric features are examined for a material function, the complex dielectric constant
p
e (v ) under an oscillatory electric field at an angular frequency v . Through the Boltzmann superposition principle (valid for all linear phenomena), e p(v ) of the type-A chains are expressed in terms
of F (t) (Eq. (23)) as
ep v ; e 0 v 2 ie 00 v e∞ 2 De
Z∞ dF t 0
exp2ivt 0 dt 0
dt 0
0
p
i 21
25
1272
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
Here, e 0 (v ) and e 00 (v ) are the dynamic dielectric constant and dielectric loss, respectively, e ∞ is the high
frequency dielectric constant, and De is the dielectric relaxation intensity.
For the monodisperse type-A chain systems with the chain number density n , De for the global chain
motion can be written as [99,102]
!
4pm~ 2
nR2e ;
R2e Na2
26
De F
3kB T
Here, F is a factor correcting a difference between the intensities of macroscopic and microscopic
electric fields (F ù 1 for the global chain dynamics [102]), and R2e is the mean-square end-to-end
distance of the chain. Eq. (26) indicates that a reduced dielectric intensity, De /n , is proportional to
R2e : (This fact was successfully utilized to confirm the Gaussian chain conformation in concentrated
systems [97].)
Because of the huge conformational freedom of flexible chains, the local correlation function C(n,t;n 0 )
(Eq. (24)) has the relaxation mode distribution. Consequently, the dielectric relaxation function F (t)
(Eq. (23)) has the mode distribution that is conveniently expressed as
X
F t
gp exp2t=te;p
27
p
where gp and te;p te;1 . te;2 . te;3 … are the normalized intensity and characteristic time for the p-th
dielectric mode. The subscript “e ” is added to the dielectric t e p to avoid confusion with the viscoelastic
t G,p defined in Eq. (15). (In some papers [115–117,121], the non-normalized mode intensity gpDe is
utilized to specify the mode distribution (and is denoted by the symbol gp). In this article, we use the
normalized mode intensity for convenience for comparison with molecular models.)
From Eqs. (25) and (27), e 0 (v ) and e 00 (v) are expressed in terms of gp and t e ,p as
X
X
t2e;p
te;p
e0 2 e 0 v
e 00 v
2
v
gp
;
v gp
28
2
2
De
D
e
1
1
v
t
1
1
v2 t2e;p
e;p
p
p
Here, e0 e∞ 1 De is the static dielectric constant. From these expressions, we note the characteristic
dielectric terminal behavior, e0 2 e 0 / v2 and e 00 / v at v well below te;1 21 :
Since the above expressions for e0 2 e 0 and e 00 are formally identical to those for G 0 and G 00 (Eq. (16)),
we can define some dielectric quantities characterizing the terminal dielectric behavior. For example,
two types of average relaxation times can be defined as
X 2
te;p gp
{e0 2 e 0 v}=v2 v!0
p
X
29
kte lw ;
e 00 v=vv!0
te;p gp
p
and
e 00 v=vv!0
kte ln ;
De
X
p
te;p gp
X
gp
30
p
(In Eq. (30), De indicates the dielectric intensity due only to the global chain motion.)
These times, analogous to the viscoelastic ktG lw and ktG ln (Eq. (18)), have been hardly used in the
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1273
dielectric community, probably because the {e0 2 e 0 } and e 00 data sometimes include considerable
uncertainties at v , te;1 21 : However, the average dielectric relaxation times kte lw and kte ln are related
to the relaxation function F (t) in a well defined way through Eqs. (27), (29), and (30). These times are
recommended to be used more frequently.
Instead of kte lw and kte ln ; an average dielectric relaxation time te;peak is quite often evaluated from an
angular frequency v peak for a peak in e 00
te;peak vpeak 21
31
A relationship between this te;peak and the longest dielectric relaxation time te;1 changes with the
dielectric mode distribution specified by gp and te;p : Thus the use of te;peak is not recommended when
we compare the te;peak values of materials having different mode distributions.
However, fortunately, we do not need to worry about this problem for linear, monodisperse type-A
chains having no inversion of the dipoles (q 1 throughout the chain backbone in Eq. (23)).
Experiments [99,104,113,118] revealed that these chains exhibit a sharp e 00 -peak immediately followed
by the low-v asymptote of e 00 ( / v ) at v , vpeak : This result indicates that these type-A chains exhibit
a narrow dielectric mode distribution. In fact, for a representative type-A chain, cis-polyisoprene, we
find te;1 ù kte lw ù te;peak ; see Section 5.2. Thus, for the linear monodisperse type-A chains with no
dipole inversion, we can safely utilize te;peak as the longest dielectric relaxation time, te;1 :
2.3.4. Comments for terminology
In literature, the slow dielectric relaxation of the type-A chains is quite often referred to as the
dielectric normal mode relaxation. This terminology originates from calculations of dielectric behavior
of these chains on the basis of the bead-spring models. The normal coordinates are mathematically welldefined for the local correlation function C(n,t;n 0 ) of these models, and the term “normal mode”
relaxation makes a perfect sense in these calculations.
However, after the pioneering paper by Adachi and Kotaka [94], this term has been traditionally used
to simply represent the dielectric relaxation due to the global motion of type-A chains, without specifying
the normal coordinates (that may change with the chain dynamics). Thus the term has lost its original and
sound meaning. In Section 5.3 of this article, these coordinates (the eigenfunctions of C) are actually
determined experimentally. Thus, this article utilizes a term “eigenmode” instead of “normal mode” to
avoid a confusion between the relaxation of the mathematically defined normal modes and the dielectric
relaxation due to the global chain motion.
2.4. Expression of diffusion properties
All diffusion properties of a chain at equilibrium are directly related to the location Ra (n,t) of the n-th
submolecule in the a -th chain. The most fundamental property is the root-mean-square displacement of
the submolecule defined by
da n; t kRa n; t 2 Ra n; 02 l1=2
32
In a time scale shorter than a time t 1 required for full equilibration of the chain conformation, da (n,t)
includes detailed information about the global chain dynamics that is comparable to the information
1274
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
included in S(n,t) (Eq. (14)) and C(n,t;n 0 ) (Eq. (24)). A dynamic structure factor, that is related to da (n,t),
has been measured in neutron spin echo experiments [123,124].
However, in almost all diffusion experiments [23–38], da (n,t) was not measured at t , t1 : Instead,
those experiments determined a diffusion coefficient DG,a of the center-of-mass of a given (a -th) chain at
t q t1 ;
"
#
{da n; t}2
DG;a
33
6t
t!∞
(For t ! ∞; the n dependence of da vanishes and da coincides with the rms displacement of the centerof-mass.) Since some details in the chain dynamics (e.g. the n dependence of Ra (n,t)) are averaged in
this DG,a , DG,a includes the information about the chain dynamics to an extent comparable to that
included in the zero-shear viscosity h 0.
3. Models of polymer dynamics
For convenience and completeness of later discussion, this section summarizes features of several
models for the chain motion. All viscoelastic, dielectric, and diffusion properties are calculated from this
motion through the expressions explained in Section 2. Readers familiar with those models may skip this
section and directly proceed to Section 4.
3.1. Rouse model
We consider a linear chain composed of N Gaussian submolecules that is placed in a viscous medium.
Each submolecule, composed of g monomers, is further modeled as a bead having a friction coefficient
z gz0 (z0 monomeric friction), and neighboring beads are connected by a Gaussian spring with a
spring constant k 3kB T=a2 (a2 ku2 l at equilibrium). This bead-spring chain (Fig. 4a), having no
hydrodynamic interaction, is referred to as the Rouse chain.
The Rouse model is a model for an isolated, non-entangled chain. However, the tube models for the
entangled chains are formulated on the basis of the Rouse dynamics, and the constraint release models
consider that the tube itself moves according to this dynamics. Considering this importance of the Rouse
model, we here summarize its features.
The time evolution of the position R(n,t) of the n-th bead is determined by forces acting on this bead,
the frictional, elastic, and Brownian forces, Ff, Fe, and FB. For N q 1; the time evolution equation is
conveniently written in a continuous form [18]
2R n; t
22 R n; t
2z
2 V n; t 1 k
1 FB n; t 0
0 , n , N
34
2t
2n2
Here, V(n,t) is the medium velocity at the position R(n,t). The first and second terms indicate Ff(n,t) and
Fe(n,t) ( kR n 1 1; t 2 2R n; t 1 R n 2 1; t in the discretized form), respectively. In the above
continuous limit for N q 1; FB is modeled as a white noise having the averages [18]
kFB n; tl 0;
kFB n; tFB n 0 ; t 0 l 2zkB T d n 2 n 0 d t 2 t 0 I
35
For the free Rouse chain (subjected to no external tensile forces at the chain ends), the boundary
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1275
Fig. 4. Schematic illustration for (a) a free Rouse chain and (b) the chain constrained in the tube. The tube can be equivalently
represented as (c) an array of friction-less slip-links.
condition for Eq. (34) is given by [18]
2R
0
for n 0 and N
in continuous limit
2n
36
From Eqs. (34) and (36), R(n,t) and the bond-vector u(n,t) ( 2R n; t=2n; in the continuous limit) are
expanded into respective eigenmodes
N
N X
X
ppn
pp
ppn
;
u n; t 2
Xp t sin
37
Xp t cos
R n; t
N
N
N
p0
p1
where Xp(t) is the amplitude of the p-th eigenmode for R at time t. At equilibrium, Xp for p $ 1 have a
Gaussian distribution characterized by isochronal averages [18]
kXeq
p l
0 and
eq
kXeq
p Xq l
2a2 N
2 2 dpq I at any t
3p p
p; q $ 1
38
1276
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
For a given initial condition {Xp(0)}, we can solve Eq. (34) to determine Xp(t) (t . 0) and further calculate
the dynamic properties of our interest. Some results utilized in later sections are summarized below. (A
discrete version of the time-evolution equation gives the same results for N q 1 at long times.)
3.1.1. Viscoelastic properties
For the chain at equilibrium at t , 0; we impose a step shear strain of arbitrary magnitude g at t 0:
This strain is specified by a displacement gradient tensor
2
3
1 g 0
6
7
7
E6
39
40 1 05
0
0
1
On imposition of this strain, the chain is considered to be affinely deformed (u ! E·u for all bond
vectors), and the eigenmode amplitudes become Xp 0 E·Xeq
p : The solution of Eq. (34) for these Xp(0)
(initial condition) is utilized to calculate the averages kXp tXq tlxy with the aid of Eq. (38). From these
averages, the orientation function S(n,t) (cf. Eq. (14)) is obtained as
!
N
2g X
tp2
2 ppn
exp 2
S n; t
40
sin
N
3N p1
tR;G
The longest viscoelastic relaxation time of the Rouse chain, t R,G, is given by
tR;G
za2 N 2
6p2 kB T
41
We consider here a monodisperseP
systemRof Rouse chains (with the number density n ). From Eqs. (4),
(10), and (40) (with a replacement n ! N0 …dn in Eq. (4)), the relaxation modulus is given by
!
N
X
tp2
G t; g G t nkB T
exp 2
42
tR;G
p1
The strain g does not appear in this modulus and thus the Rouse chain exhibits no nonlinearity in its
G(t,g ). Correspondingly, the Rouse chain under the steady shear flow exhibits no thinning in its shear
viscosity. (However, under elongational flow, the Rouse chain exhibits a significant increase of its hE e_
with increasing Henckey strain rate e_ ; i.e. the strain-hardening [176].)
From the above G(t), we find molecular expressions of some viscoelastic quantities:
1. viscoelastic relaxation times and mode intensities (cf. Eqs. (16)–(19))
tG;p tR;G =p2 ;
hp nkB T
43
(For these t G,p and hp, G 0 G 00 / v1=2 at v well above [t R,G] 21 [1,18].)
2. viscosity, compliance, and second-moment average relaxation time (cf. Eqs. (17) and (18))
h0
nza2 N 2
;
36
Je
2
;
5nkB T
ktG lw
p2
t
15 R;G
44
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1277
3.1.2. Lack of intrinsic length scale
On an increase of the monomer number in each submolecule (bead) from g to b g, both z and a 2
increase by the factor b while N decreases by a factor b 21. Thus this change of g does not affect the
viscoelastic quantities characterizing the long-time behavior of the Rouse chain, e.g. t R,G, h 0, and Je (cf.
Eqs. (41) and (44)).
In contrast, the change of g affects the short-time behavior. For example, the initial modulus G(0)
( n NkBT; Eq. (42)) decreases by the factor b 21 on this change. This is a natural consequence of the
coarse-grained nature of the Rouse chain. The increase of g corresponds to an increase of the internal
equilibration time t p of the Rouse submolecule tp / g2 : The G(0) of the Rouse chain corresponds to
the modulus of the real chain observed at tob tp and thus decreases with the increase of g. (The
successive submolecules behave as a stress generating unit (an enlarged submolecule) when they are
mutually equilibrated; see Section 2.2.3.)
The above results reflect lack of an intrinsic length scale for the unconstrained Rouse chain, i.e. the
validity of the same dynamics (Eq. (34)) in the entire range of spatial scales ,Re : Because of this lack,
the number b of submolecules that are mutually equilibrated within the unit time of observation tob
1=2
increases continuously with tob b / tob
: The invariance of t R,G, h 0, and Je on the change of g also
results from the lack of the intrinsic length scale.
3.1.3. Dielectric properties
As can be noted from Eqs. (24) and (37), the local correlation function C(n,t;n 0 ) of the Rouse chain
eq
includes averages kXeq
p t·Xq 0l with p, q $ 1: We can calculate these averages ( 0 for p ± q) from
Eqs. (34) and (38) to find an expression of C(n,t;n 0 ) [18,115]
!
!
N
2 X
ppn
ppn 0
tp2
0
sin
exp 2
C n; t; n
45
sin
N p1
N
N
tR;e
with
tR;e
za2 N 2
3p2 kB T
46
The Gaussian nature of the chain (Eq. (1)) is reflected in C(n,0;n 0 ) dnn 0 : Note also that the longest
dielectric relaxation time of the Rouse chain, t R,e , is twice the viscoelastic t R,G (Eq. (41)).
For a given arrangement of the type-A dipoles, q n (cf. Eq. (23)), all dielectric properties are
calculated from the above C(n,t;n 0 ) through Eqs. (23)–(25). Specifically, the t e ,p and gp appearing in
Eqs. (27)–(30) are given by
2
2 ZN
ppn
2
dn
te;p tR;e =p ;
gp 2
q n sin
47
N
N
0
R
P
(This gp is obtained from Eq. (23) after a replacement, n ! N0 …dn:)
3.1.4. Diffusion properties
As seen from Eqs. (32) and (37), the mean-square displacement of the n-th submolecule of the Rouse
eq
eq
eq
chain, d n; t2 ; includes averages kXeq
p t 2 Xp 0·Xq t 2 Xq 0l: Utilizing Eqs. (34) and (38) to
1278
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
calculate these averages, we find
!#
"
N
X
kB T
4
tp2
2
2
2 ppn
1 2 exp 2
t1a N
d n; t 6
cos
2 2
Nz
N
tR;e
p1 p p
48
Applying Eq. (33) to this d n; t2 ; we obtain an expression for the diffusion coefficient of the center of
mass of the Rouse chain
DG kB T=N z
49
3.2. Doi–Edwards model
In concentrated systems, long polymer chains are deeply interpenetrating each other. If one chain
(probe chain) moves over a large distance in a lateral direction with respect to its backbone, it may drag
many surrounding chains (matrix chains) to suffer an enhanced friction. In the molecular picture of Doi
and Edwards [14], this large-scale lateral motion is an unlikely motion and thus the probe moves
anisotropically with respect to its backbone; the lateral motion is restricted within a certain small
distance while the motion along the backbone, not dragging the matrix chains, occurs freely over
large distances. In other words, the matrix chains topologically constrain the probe motion within a
tube-like region surrounding the probe backbone. This section summarizes some fundamental properties
of the Doi–Edwards (DE) model derived from this molecular picture.
3.2.1. Model parameters
The DE model considers a Rouse chain constrained in a tube (Fig. 4b). In this article, we limit
ourselves to the chain motion in spatial scales larger than the tube diameter. For this purpose, we choose
the size of the Rouse submolecule to be identical to the tube diameter. This particular submolecule is
hereafter referred to as an entanglement segment, and the number of monomers in this segment is
denoted by me (not by the symbol “g” used for submolecules of arbitrary size). A trajectory of the
bond vectors of these segments coincides with the tube axis that is referred to as the primitive path.
The fundamental model parameters utilized in this section are the me, the tube diameter a, the friction
coefficient for the entanglement segment z , and the segment number in the chain N, with the first three
parameters being independent of the chain length. These parameters are related to the molecular
parameters of the real chain
a me1=2 b;
z me z0 ;
N m=me
50
Here, b is the effective step length of the monomer, m the number of monomers per chain (degree of
polymerization), and z 0 the monomeric friction coefficient.
The tube is equivalently represented as an array of friction-less slip-links (Fig. 4c) [15]. We can use
these slip-links when we take a molecular picture of a point-wise entanglement of the chains. The chain
ends are subjected to a tensile force of a magnitude [18]
Feq 3kB T=a
51
This force, identical to the equilibrium chain tension in magnitude, prohibits a large-scale, lateral
leakage of the chain from the array (from the tube wall). Thus the force Feq ensures that an average
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1279
contour length of the chain at equilibrium, measured along the array (tube axis), has a non-zero value
that coincides with the equilibrium tube length
Leq Na R2e =a
52
Here, R2e is the unperturbed mean-square end-to-end distance of the chain. The force Feq plays a central
role in the non-equilibrium dynamics of the DE model described later in Section 3.2.4.
3.2.2. Equilibrium dynamics
In the DE model, the tube is assumed to be fixed in space. In addition, at equilibrium, the chain is
assumed to have a constant contour length, L Leq : Under these assumptions, all entanglement
segments of the chain coherently move back and forth along the tube axis. This reptation motion is
equivalent to one-dimensional diffusion along the tube.
The original Doi–Edwards papers [14–17] specify the entanglement segment by its curvi-linear
length coordinate s measured along the tube. Under the above assumptions, the segment index n is
identical to s/a. For convenience of later comparison of the DE model and the constraint release model,
we here utilize n to describe the equilibrium reptation motion and the corresponding properties.
The reptating chain exhibits a stochastic, sliding motion along the tube. This motion is described by
time evolution equations for the position R(n,t) and bond vector u(n,t) of the n-th entanglement segment
R n; t 1 Dt R n 1 Dn; t;
u n; t 1 Dt u n 1 Dn; t
53
Here, Dn is a stochastic sliding distance normalized by a, and Dt is a time required for this sliding
motion. The averages of Dn are given by [14,18]
kDnl 0;
kDn2 l
2Dc
Dt
a2
with
Dc
kB T
Nz
54
where Dc is a curvi-linear diffusion coefficient (that coincides with DG of the Rouse chain; Eq. (49)).
Fast internal motion in the entanglement segments at the chain ends allows these segments to always
have an equilibrated configuration specified by
u au~ eq
at the chain ends
55
Here, u~ eq is an isotropically distributed unit vector.
It is informative to analyze the reptation motion in relation to the idea of coarse-graining (cf. Section
2.1). From the Rouse expression of the relaxation time (Eq. (46)), an internal equilibration time t p(a) of
each entanglement segment (including me monomers) is written as
tp a
m2e b2 z0
a2 z
3p2 kB T
3p2 kB T
56
For long chains N q 1; this t p(a) is much smaller than a time Dt p(a) required for the chain to reptate
over the segment size a
Dtp a
Na2 z
2kB T
57
(This Dt p(a) is obtained from Eq. (54) with Dn 1:) Thus, under the assumption of constant L, the
1280
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
coarse-grained chain having the submolecule size a can be satisfactorily used to describe the reptation
dynamics in spatial scales .a and time scales .Dt p(a) (within which each submolecule is internally
equilibrated). This assumption, corresponding to an assumption of no equilibration of neighboring
entanglement segments, is further discussed in Section 3.4.
3.2.3. Properties in the linear regime
The reptation motion is fully described by Eqs. (53) and (54) under the boundary condition, Eq. (55).
In the linear response regime, we can utilize these equations to calculate all dynamic properties.
3.2.3.1. Linear viscoelastic properties From Eqs. (14) and (53), a time evolution equation for the
orientation function S(n,t) is written as S n; t 1 Dt S n 1 Dn; t: For long chains N q 1; this
equation is conveniently re-written in a continuous form [15]
2S n; t
D 22 S n; t
2c
2t
a
2n2
58
In this continuous limit, the boundary condition representing the random orientation at the chain ends
(Eq. (55)) is expressed as
S n; t 0
for n 0; N
59
For the chain subjected to a step-shear strain g at t 0; the initial condition is given by
S n; 0
4
g
15
0 , n , N
60
(Eq. (60) results from the low-g behavior of the DE universal tensor Q explained later in Section
3.2.4.1.)
From Eqs. (58)–(60), S(n,t) is readily calculated as
!
X 4
4
ppn
tp2
sin
exp 2
61
S n; t
g
15 podd pp
N
trep
with
trep
zN 3 a2
2
p kB T
3tp aN 3
62
Here, t rep is the reptation time required for the chain to escape from the tube. The orientation relaxation
described by Eq. (61) occurs from the chain end toward the chain center.
We consider here a monodisperse system of reptating chains (with the number density n ) and
calculate thePlinear Rrelaxation modulus G(t) from S(n,t). Utilizing Eqs. (13), (14), and (61) (with a
replacement n ! N0 …dn in Eq. (13)), we obtain
!
X
4
8
tp2
G t GN mrep t with GN nNkB T and mrep t
63
exp 2
2 2
5
trep
podd p p
Here, GN is the entanglement plateau modulus, and m rep(t) is the normalized relaxation modulus for the
reptation process. From this G(t), we find
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1281
1. viscoelastic relaxation times and mode intensities (cf. Eqs. (16)–(19))
tG;p trep =p2 ;
hp 8GN =p2 p2 for p odd;
hp 0 for p even
64
(For these t G,p and hp, G 0 / v0 and G 00 / v21=2 at v well above [t rep] 21.)
2. viscosity, compliance, and second-moment average relaxation time (cf. Eqs. (17) and (18))
h0
p2 GN trep
;
12
Jc
6
;
5GN
ktG lw
p2
t
10 rep
65
If we increase the monomer number me in the entanglement segment (submolecule) by a factor b ,
both z and a 2 increase by the factor b while N decreases by a factor b 21. Then, the calculated
viscoelastic quantities does not remain the same: For example, both t rep and GN decrease by a factor
b 21 (cf. Eqs. (62) and (63)). This result means that the reptating chain has an intrinsic length scale, a.
This feature is quite different from the feature of the unconstrained Rouse chain (having no intrinsic
length scale; see Section 3.1.2).
Because of this intrinsic length scale (fixed tube diameter), the chain dynamics in the DE model is not
affected by the motion of surrounding chains. Thus G(t) of melt blends of linear chains deduced from this
model is written as
X
yi mrep;i t
66
G t GN
i
where y i is the volume fraction of the i-th component in the blend, and m rep,i(t) is the normalized
reptation function of this component (cf. Eq. (63)). This expression of G(t) indicates a serious failure
of the DE model for blends, as explained later in Section 4.4.
3.2.3.2. Dielectric properties Following the above procedure for obtaining Eq. (58), we find a time
evolution equation for the local correlation function (Eq. (24)) in the continuous limit
2C n; t; n 0
D 22 C n; t; n 0
2c
2t
2n2
a
67
Under the initial and boundary conditions,C n; 0; n 0 dnn 0 (cf. Eq. (1)) and C n; t; n 0 0 for n; n 0 0
(cf. Eq. (55)), Eq. (67) is solved to give
!
!
0
2
X
2
ppn
ppn
tp
sin
68
sin
exp 2
C n; t; n 0
N p$1
N
N
trep
Here, t rep is the reptation time given in Eq. (62).
All dielectric quantities of type-A chains are calculated from this C(n,t;n 0 ). For monodisperse systems,
the t e ,p and gp included in Eqs. (27)–(30) are given by
2
2 ZN
ppn
dn
te;p trep =p2 ;
gp 2
q n sin
69
N
N
0
where q n is a parameter
P specifying the arrangementsRof the type-A dipoles (cf. Eq. (23)). (We have
replaced the summation n in Eq. (23) by an integral N0 …dn to obtain this gp.)
1282
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
The dielectric t e ,p is identical to the viscoelastic t G,p (Eq. (64)). In addition, for the chains without the
dipole inversion q n 1 for n 0 2 N; the normalized dielectric mode intensities are given by
gp 8=p2 p2 for p odd and gp 0 for p even
70
These gp are identical to the normalized viscoelastic mode intensities, hp/GN (Eq. (64)). Thus, the
normalized viscoelastic and dielectric losses G 00 =GN and e 00 v=De are exactly the same for the reptating
type-A chains having no dipole inversion.
3.2.3.3. Diffusion properties Following the procedures for obtaining Eqs. (58) and (67), we can
formulate a time evolution equation for the mean-square displacement [d(n,t)] 2 of the n-th entanglement
segment of the reptating chain [14,18]. Solving this equation under appropriate boundary and initial
conditions, we find (for the chain having constant L Leq ) [14,18]
!#
"
X 4
kB T
tp2
2
2
2 ppn
1 2 exp 2
71
t1a N
cos
d n; t 6
2 2
N
trep
3N 2 z
p$1 p p
where t rep is given by Eq. (62). From this [d(n,t)] 2, the diffusion coefficient of the center of mass is
obtained as
DG
kB T
3N 2 z
72
This DG can be expressed in terms of the diffusion coefficient DRouse (Eq. (49)) that the Rouse chain
utilized in the DE model would exhibit under the absence of the tube
DG DRouse =3N
73
DG can be also expressed in terms of the viscosity h Rouse of this Rouse chain (Eq. (44)) under absence of
the tube, the rms end-to end distance Re of the chain, the chain molecular weight M, and the entanglement plateau modulus GN as [177]
GN R2e
nkB T
M
DG M 22
74
GN
135M
hRouse
3.2.4. Non-equilibrium dynamics
Under large strain/fast flow, the conformation and motion of chains are significantly different from
those at equilibrium. This difference leads to nonlinear responses of the chains. These responses have
been mainly investigated for viscoelastic properties. For monodisperse systems with the chain number
density n , some characteristic nonlinear viscoelastic features of the DE model are summarized below.
In the description of these features, we follow the original DE papers [15–17] to specify the entanglement segment by its curvi-linear length coordinate s measured along the tube (s 0 at one end of the
chain). During the nonlinear relaxation processes, the chain length L is not necessarily identical to the
equilibrium length Leq ( Na; Eq. (52)) and s does not coincides with na (n segment index); this
coincidence is recovered when L Leq :
3.2.4.1. Nonlinear damping [15,18] For a chain in the equilibrium state at t , 0 (Fig. 5a), we impose a
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1283
Fig. 5. Schematic illustration of changes in the chain conformation before and after imposition of a step strain considered in the
Doi–Edwards model.
step strain at t 0: The resulting stress relaxes due to the chain motion at t . 0: The array of slip-links, a
discretized expression of the tube, can be conveniently utilized to describe this relaxation behavior in the
following way.
On imposition of the strain specified by a displacement gradient tensor E, the chain and the slip-link
array are considered to be affinely deformed (Fig. 5b). Then, the bond vector u(s 0 ,0) is written as
E·ueq(s), where ueq(s) is the equilibrium bond vector just before imposition of the strain. Since L can
change with the strain, the coordinate s 0 for u is not necessary identical to the s for E·ueq. However, the
local configuration tensor averaged for all chains, kE·ueq sE·ueq s=me b2 l (cf. Eq. (3)), does not
depend on s; namely, the chain is orientated/stretched uniformly along its contour on average. Considering this point, we can eliminate the s dependence of this tensor and write the stress s at t 0 as (cf. Eq.
(4))
s 0 3nNkB T
E·ueq E·ueq
me b2
2pI
o
75
1284
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
Here, the average k· · ·lo is taken for an isotropically distributed ueq (having the averages kueq lo 0 and
kueq ueq lo a2 I=3:)
At t 0; the average chain length L 0 NkuE·ueq ulo is larger than the equilibrium length Leq and the
chain tension F(0) is larger than Feq (Eq. (51)). Thus the chain shrinks until its F is decreased to Feq,
while the slip-link array preserves its spatial configuration. For a long chain, this shrinkage is considered
to take place via the Rouse motion along the array (tube axis) before the reptative motion occurs
significantly. For this case, the shrinkage completes at an equilibration time teq ù tR;e (Rouse relaxation
time; Eq. (46)).
Just after the above shrinkage, L is reduced to Leq and the chain abandons a certain number of the
initial slip-links (Fig. 5c). Then, the number of surviving slip-links that effectively contribute to the
anisotropic part of s is reduced by a factor Leq =L 0 a=kuE·ueq ulo ; meaning that N included in Eq. (75) is
replaced by Na=kuE·ueq ulo after the shrinkage. At the same time, the number of monomers between these
slip-links increases by a factor uE·ueq u=a so that me included in Eq. (75) becomes me uE·ueq u=a: Considering
these two changes on the shrinkage, we can write the stress at t teq as
*
+
E·ueq E·ueq
1
2pI
76
s teq 3nNkB T
kuE·ueq ulo
uE·ueq u
o
(Here, we have utilized a relationship, me b2 a2 :)
For quantitative calculation of this s, it is convenient to express ueq as ueq `u~ eq ; where ` is the
length of ueq (with k`2 l0 a2 ) and u~ eq is an isotropically distributed unit vector. After making an
average for `, the anisotropic part of Eq. (76) becomes
*
+
E·u~ eq E·u~ eq
1
I
77
with Q E
2
s teq 3nNkB TQ E
3
kuE·u~ eq ulo
uE·u~ eq u
o
Here, Q is the DE universal orientation tensor frequently used in tube R
models.
The averages included in Eq. (77) can be calculated as k…lo 1=4p …sin u du df; where u and f
are the components of u~ eq in the polar coordinate. For example, the shear stress s teq s teq xy
against the shear strain E with the magnitude g (Eq. (39)) is calculated as
s teq g
4nNkB T
h g
5
with
15
1
h g
4g k1 1 2gu~eq;x u~eq;y 1 g2 {u~eq;y }2 1=2 l0
12
29 2
g 1 O g4
105
78
*
u~eq;x 1 gu~eq;y u~eq;y
1 1 2gu~eq;x u~eq;y 1 g2 {u~eq;y }2 1=2
+
0
79
As shown in Eq. (78), s (t eq) exhibits a nonlinearity represented by the shear damping function h g
15Qxy =4g: (Qxy 4g=15 for g p 1; this result was utilized in Eq. (60).)
At t teq ; the chain has its equilibrium length Leq but is still orientated uniformly along its contour on
average. This orientation, represented by Q(E), relaxes via the reptative motion of the chain. Since L has
been reduced to Leq, this motion is described by Eq. (58) (with n s=a). (In the discretized molecular
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1285
picture, the slip-links once abandoned on the chain shrinkage are reformed (under no memory of their
original positions; not shown in Fig. 5c and d) at some time after the shrinkage. Then, the reptation
behavior at t . teq is determined by N slip-links, as considered in Eq. (58).)
Thus the stress relaxation behavior for the above reptation process is described by the nonlinear shear
relaxation modulus
G t; g s t=g h gG t
for t . teq
80
Here, G(t) is the linear relaxation modulus given by Eq. (63). It should be noted that the G(t,g ) is
factorized into the time- and strain-dependent parts, G(t) and h(g ). This feature, referred to as the time–
strain separability, is a natural consequence of the DE assumption that the chain length first relaxes and
then the orientation relaxation follows.
In the linear viscoelastic regime (g ! 0), Eqs. (78) and (79) indicate that G teq s teq =gg!0
4nNkB T=5: This G(t eq) is utilized as the entanglement plateau modulus GN (Eq. (63)). (Because of the
chain shrinkage considered in the DE model, G(t eq) is not identical to the initial modulus for the affine
deformation, G 0 nNkB T:)
3.2.4.2. Constitutive equation [16–18] After imposition of the step strain, the bond-vector u changes
in a sequence, ueq s ! u s 0 ; 0 E·ueq s ! u s 00 ; teq au s 0 ; t=uu s 0 ; 0u: A relationship among the
curvi-linear length coordinates s, s 0 , and s 00 changes with the configuration of ueq(s). Just after the chain
contour shrinkage under the step strain, the orientation averaged for all chains is uniform throughout the
chain (i.e. independent of s 00 ) and the difference among s, s 0 , and s 00 has no effect on the above damping
behavior. However, for a strain with arbitrary history, this difference becomes crucial.
Considering this point, Doi derived a constitutive equation describing the stress–strain relationship
for an arbitrary strain [18,178]. His equation, rigorously expressing the DE molecular picture under the
arbitrary strain, was given as a set of coupled integro-differential equations that need to be solved
numerically for most cases.
Doi and Edwards [16–18] also derived an approximate but much simpler constitutive equation. In
their approximation, referred to as the independent alignment approximation (IAA), the above difference between s and s 00 is neglected. (This IAA corresponds to an approximation that the chain shrinks
affinely to preserve its shape.) Under the IAA, the DE tensor (Eq. (77)) becomes [16,18]
*
+
E·u~ eq E·u~ eq
I
IAA
E
2
Q
81
2
3
uE·u~ eq u
o
The DE constitutive equation, derived under an assumption of no stretching of the chain (i.e. for slow
strain), is written in terms of this Q IAA as [16–18]
0
Zt
I
0 2mrep t 2 t IAA
~ 2
dt
Q
Et;t 0
82
s t 5GN S t with S t ku~ ul
3
2t 0
2∞
Here, S t is the orientation tensor averaged throughout the chain contour, Et;t 0 is a displacement gradient
tensor at the present time t measured from a past time t 0 , m rep(t) is the normalized, linear relaxation
modulus (Eq. (63)), and GN is the plateau modulus. (For infinitesimal step shear strain g , the shear
component of Q IAA is given by g /5 (for t 0 , 0 and t . 0). In Eq. (82), the numerical pre-factor “5” is
included so as to recover the linear relaxation behavior s t gGN mrep t for this Q IAA).
1286
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
The first part in the above DE constitutive equation is the stress expression in terms of S (the stress–
optical rule), and the second part, the time evolution of S determined by the reptative chain motion (m rep)
and externally applied strain/flow (Et;t 0 ). This DE equation belongs to a class of the BKZ constitutive
equations [16,176,179].
The IAA is a harmless approximation if the direction of strain is never reversed at any t 0 in the part
0
t , t; for such strains, the stress s(t) calculated from Eq. (82) (with IAA) is satisfactorily close to that
calculated from the rigorous constitutive equation [18,178] without IAA. (However, a rather serious
error of IAA emerges if this reversal occurs.)
Under IAA, the damping function against the step shear strain is given by [16,18]
*
+
u~eq;x 1 gu~eq;y u~eq;y
5
5 2
IAA
g
12
g 1 O g4
83
h
2
2
21
g 1 1 2gu~eq;x u~eq;y 1 g {u~eq;y } 0
For the shear flow at a constant rate g_ (Et;t 0 being given by Eq. (39) with g g_ t 2 t 0 ), the steady shear
viscosity h g_ calculated from Eq. (82) is expressed in terms of this h IAA as [17,18]
Z∞ dG t
_ rep / gt
_ rep 23=2 for g_ q trep 21
hIAA g_ t dt ù h0 hIAA gt
h g_ 2
t
84
dt
0
where h 0 is the zero-shear viscosity and t rep is the reptation time (Eq. (62)). Similarly, the elongational
viscosity under a uniaxial flow in the z-direction at a constant Henckey strain rate e_ is calculated to be
5 Z∞ dG t IAA
21
Qzz e_ t 2 QIAA
hE e_ 2
for e_ q trep 21
85
xx e_ t dt / e_
e_ 0 dt
Thus the DE model predicts thinning for both h g_ and hE e_ under fast flow.
_ decreases with
Concerning the above results, we note that the calculated shear stress s g_ gh
21
increasing g_ for g_ q trep ; namely, the fast shear flow is unstable in the DE model. This instability
results from the perfect orientation of the chain in the sliding plane (having the normal in the shear
gradient direction) predicted for g_ q trep 21 : The bond vector u of the perfectly orientated chain has
zero-component in the shear gradient direction to exhibit this instability. (Consequently, the DE model
predicts no instability for the elongational flow because the chain always has a non-zero component in
the direction of elongation.)
3.3. Arm retraction models
For star-branched chains composed of flexible arms, the tube models consider that the branching point
is essentially fixed in space until the arms fully relax. Then, the arms do not reptate but retract along the
tube toward this point to relax (Fig. 6a). During this retraction, the arm has to take an entropically
unfavorable, distorted conformation. Thus the arm retraction is associated with an entropic penalty.
Under the assumption of the fixed tube, models describing this arm retraction were developed by de
Gennes [19], Doi and Kuzuu [20], Klein [140], Graessley [135], and Pearson and Helfand [21]. Later,
Ball and McLeish [153] incorporated the dynamic tube dilation (DTD) mechanism in the arm retraction
model, and Milner and McLeish [154] further refined the model. This section summarizes some dynamic
features of the early models. (The features of the later models considering DTD are described in Section
3.6.)
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1287
Fig. 6. Schematic illustration of (a) the arm retraction process and (b) associating entropic potential U considered in the Doi–
Kuzuu and Pearson–Helfand models.
In the remaining part of this section, we consider monodisperse star chains each having q arms of
equal length. The number density of the chains is n , and the number of the entanglement segments
per arm is denoted by Na. The equilibrium monomer number in this segment, me, and the tube
diameter, a ( me1/2b), are taken to be the same for the star and linear chains, as suggested from the
experimentally found coincidence of GN for these chains. Thus, within the context of the tube
models, GN of the star chains is written as
GN
4
nqNa kB T
5
86
(The product n qNa is the total number of entanglement segments per unit volume that is dependent
only on the chain concentration.)
1288
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
Obviously, the arm retraction corresponds to a transient decrease of the arm contour length L. Thus,
following Pearson and Helfand [21], we describe the features of the arm retraction models in terms of the
curvi-linear length coordinate z measured from free end of the tube; see Fig. 6. (This z is identical to
Leq 2 s; with s being the coordinate used by Doi and Kuzuu [20].)
3.3.1. Fraction of surviving tube segments
In the tube models assuming the fixed branching point, the star-arm is thermally breathing, i.e.
stretching and retracting along the tube with equilibrium probabilities. The free end of the arm can
move in any direction when the arm stretches, i.e. the tube segments newly created on this stretch
(hatched portion in Fig. 6a) has an isotropic orientation distribution. Thus, at a time t, the memory of the
initial arm configuration is preserved only at z . za tm ; where tm is the time at which the arm most
deeply retracts, by the distance za(tm), in an interval of time between t and 0 (initial time).
Linear viscoelastic relaxation of the arm reflects decay of the orientational anisotropy represented by
the orientation function S(z,t) (written as a function of z). In the surviving (non-interpenetrated) portion
of the tube at z . za ; S(z,t) has its initial value S0. In the renewed portion at z , za (hatched portion in
Fig. 6a), the arm conformation has become isotropic and S z; t 0: From the stress–optical rule
(Eq. (13)), the relaxation modulus G(t) is proportional to an integral of S z; t with respect to z. Thus,
G(t) is written as
G t GN w t
87
Here, w t 1 2 za =Leq is a fraction of the surviving tube segments (and GN corresponds to the integral
of S z; 0 S0 throughout the arm contour). Eq. (87) is valid not only for the arm retraction models
explained in this section but also for all tube models that assume the fixed tube, including the DE model
for linear chains.
For the star chains having non-inverted type-A dipoles in respective arms, the dielectric relaxation
function F (t) (Eq. (23)) deduced from the arm retraction model can be similarly rewritten as
F t w t
G t=GN
88
This expression (for the cases of no dipole inversion) is valid again for all tube models assuming the
fixed tube.
3.3.2. Equilibrium dynamics
Doi and Kuzuu [20] considered the motion of the free end of the arm under a quadratic potential of
entropic origin (cf. Fig. 6b)
UDK z
akB T 2
z
{Leq }2
with a n 0 Na and Leq Na a
89
Here, n 0 is a numerical coefficient; n 0 15=8 for the Gaussian chain [18]. In the Doi–Kuzuu (DK)
model, n 0 was left as an adjustable parameter (close to unity).
In the DK model [20], the arm retraction process is regarded as a reptation process under the activation
barrier UDK. Thus the longest relaxation time of the DK model is written as tarm
trep expUDK Leq =kB T / Na3 expn 0 Na ; where t rep is the reptation time given by Eq. (62) with N
Na : This t arm increases exponentially with Na. The corresponding G(t), calculated from an approximately
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1289
evaluated w t; was found to have a broad mode distribution characterized by the steady state compliance, Je 15a=4GN / Na : The zero-shear viscosity, h0 ù tarm =Je ; increases exponentially with Na.
Pearson and Helfand [21] made a detailed analysis for a probability density p(z,t;z0,zm) for the arm
end to be located at z and z0 at times t and 0 given that the end did not move further toward the branching
point than a curvi-linear distance zm at times between 0 and t. They calculated p from the Smoluchowski
equation including the DK potential UDK(z) (Eq. (89))
2p
1 2
2p
2UDK
k T
1
p
90
2t
za 2z B 2z
2z
Here, z a ( / Na) is the friction for the arm retraction. From this p, the probability C (z,t) that the arm end
has not penetrated to z is obtained as [21]
Zz
t
for z q ze and t q te
C z; t
p z 0 ; t; z0 ; z dz 0 ù exp 2
91
t z
2∞
with
"
#
za p1=2 {Leq }2 Leq
z2
t z
exp a
z
2a3=2 kB T
{Leq }2
a n 0 Na
92
Here, ze Leq = 2a1=2 is the rms fluctuation in the length of the tube confining the arm of length Leq, t e
za z2e =kB T is the minimum time required for the arm end to retract by the distance ze, and t (z) is a
time required for the retraction by the distance z q ze : The time required for the full retraction
z Leq ; corresponding to the longest relaxation time, is given by
tarm t Leq
za p1=2 {Leq }2
expa / Na3=2 expn 0 Na
2a3=2 kB T
93
This t arm increases exponentially with Na. (This result of the PH model is qualitatively the same as that of
the DK model, although the prefactor of t arm is different.)
Since the probability density that the end retracts to z is given by C 0 z; t 2C z; t=2z; the fraction
of the surviving tube fragments at time t is evaluated from Eqs. (91) and (92) as [21]
1 ZLeq
w t
L 2 zC 0 z; t dz
94
Leq ze eq
8
< 1 2 zp t=Leq 1 O Na21
for te p t p tarm
ù
:
0:5n 021 Na21 E1 t=tarm 1 O Na22
for t . tarm
Here, z p(t) is a solution of an equation, t t zp t with t (z) being given by Eq. (92), and E1 is the
exponential integral.
3.3.3. Linear viscoelastic and dielectric properties
From w t given by Eq. (94), the viscoelastic and dielectric relaxation functions G(t) and F (t) are
calculated (Eqs. (87) and (88)). Thus, both viscoelastic and dielectric longest relaxation times are given
1290
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
by Eq. (93). The zero-shear viscosity and steady state compliance, calculated from G(t) are [21]
h0 ù
GN za p1=2 {Leq }2 25=2
a expa / Na1=2 expn 0 Na
4kB T
Na q 1
Je ù n 0 Na =GN
95a
95b
where GN is given by Eq. (86). Thus h 0 increases exponentially while Je increases linearly with Na. This
result of the PH model is qualitatively the same as that of the DK model. Since these models consider the
retraction of single arm having the fixed end, the calculated t arm, h 0, and Je are independent of the arm
number q. (Remember that GN depends only on the chain concentration.)
3.3.4. Diffusion properties
Now we consider the center of mass diffusion of the star chains. In the models of Graessley [135] and
of Klein [140], this diffusion is considered to occur only when q 2 2 arms simultaneously retract to allow
the motion of the branching point by a distance ù a: The corresponding diffusion coefficient obtained
from these models can be summarized as
DG;star a2 =6tq22 ù f qNa2a exp2bNa q 2 2
96
where t q22 is a time required for the simultaneous retraction, f(q) is a weak function of q, and a and b
are constants. Different assumptions in the evaluation of t q22 led to differences in f(q), a , and b of the
models; specifically, a 1 and 2 in the models by Klein [140] and by Graessley [135]. However, the
essential behavior, DG;star , {exp2bNa }q22 (the dominant part of Eq. (96)), is the same for these
models. The exponent included in this DG,star, q 2 2; reflects the cooperativity of the q 2 2 arms required
for their simultaneous retraction.
Rubinstein [45] considered that the retractions of the q 2 2 arms (necessary for the diffusion) do not
need to occur simultaneously. In other words, the diffusion can take place on the retraction of an arm
followed by motion of the other arms. On the basis of this idea, he evaluated DG,star of the star chain
trapped in an array of obstacle (entanglement mesh) as [45]
DG;star , f 0 z; qexp2bNa
with
f 0 z; q
1 1 z 2 1 q 2 1=2z!q!
z 1 q 2 1!
97
Here, z is a coordination number (gate number) of a cell in the obstacle array. Reflecting the lack of the
simultaneous retraction, the arm number q is included in the combinatorial prefactor f 0 , not in the
exponential term. This f 0 is a weakly decreasing function of q.
All the above models predict the decrease of DG,star with increasing q (though this decrease is much
weaker in the model of Rubinstein than in the models of Graessley and Klein). In contrast, the calculated
viscoelastic and dielectric properties (Section 3.3.3) are independent of q. This difference reflects a fact
that the tube models attribute these properties to the single chain motion while motion of all arms is
included in the diffusion.
3.3.5. Nonlinear damping
The diffusion and linear relaxation properties of the star chains are quite different from those of linear,
reptating chains explained in Section 3.2. However, this difference disappears in the nonlinear damping
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1291
behavior. After imposition of large step strains, the star-arm is considered to recover its equilibrium
length via the shrinkage similar to that of the linear chain. Thus the models consider that the damping
function for the star chains is identical to the function for the linear chains (cf. Eq. (79)).
3.4. Contour length fluctuation models
The DE model originally considered a flexible linear chain (Rouse chain) in the tube. This chain is
composed of entanglement segments (submolecules) connected by the Gaussian springs. Thus the
distance between centers of the neighboring segments is not fixed but thermally fluctuating around
the average, a. This leads to the fluctuation of the contour length L of the chain measured along the
tube, although this dynamic process was not considered in the DE model for simplicity.
During this contour length fluctuation (CLF) process, a relaxation similar to that for the arm retraction
process occurs: the tube segments near the chain ends are renewed to have random orientation when the
chain end moves back and forth.
Despite this similarity, there is an important difference between the CLF of the linear chain and the
retraction of the star arms. Under the assumption of fixed tube, the retraction is the only possible
dynamic mode that allows the full relaxation of the star arms. On the other hand, the linear chain can
fully relax either by CLF or reptation. Since the full relaxation via CLF is retarded due to an entropic
penalty similar to that for the retraction, the chain is considered to relax via reptation at long times. Thus,
in general, the effects of CLF for the linear chain are to induce fast relaxation near chain ends and to
reduce an effective contour length over which the chain reptates to fully relax.
This section briefly explains features of the Doi model [133,134] that describes these CLF effects
under the assumption of the fixed tube. The Milner–McLeish model [152] considering CLF in a nonfixed (dynamically dilating) tube is explained later in Section 3.6.
3.4.1. Equilibrium dynamics
For the linear chain composed of N entanglement segments, Doi [133,134] analyzed the relaxation
due to CLF and reptation, the former being induced by one-dimensional Rouse motion along the tube.
In an approximate treatment, Doi [133] considered a mean waiting time t (z) for the first passage of
the chain end through the tube segment at the curvi-linear length coordinate z (measured from the chain
end at time 0). This t (z) is essentially determined by the Rouse fluctuation for z , DLeq ; while the
reptation motion governs t (z) for z . DLeq : Here, DLeq is the rms fluctuation of the contour length
calculated for the Rouse motion
DLeq k L 2 Leq 2 l1=2 a N=31=2
98
From the probability density of tube survival at the location z written in terms of this t (z), C 0 z; t ù
2 exp2t=t z=Leq 0 # z # 0:5Leq ; Doi evaluated the fraction of the surviving tube segment as [133]
w t ù
Z∞
2 ZLeq =2
exp2t=t z dz ù
H~ t exp2t=t dln t
Leq 0
2∞
99
Here, H~ t is a spectrum representing the relaxation mode distribution of w t: In Doi’s approximate
1292
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
treatment [133] H~ t is given by
8
< 0:5 t=N trep 1=4
for t , trep =N
~
H t ù
: 0:5 t=t 1=2
f
for trep =N , t # trep
rep
100
f
is the longest relaxation time for reptation in an effectively shortened tube of a length ù
where trep
f
f
is written in terms of t rep for pure reptation (without CLF; Eq. (62)) as trep
ù
Leq 2 DLeq : This trep
21=2 2
trep 1 2 N
:
The H~ t for t , trep =N is dominated by the Rouse fluctuation while H~ t for t . trep =N is due to
reptation. The cross-over time t rep/N coincides, except for a numerical prefactor, with a time required for
the equilibration of successive entanglement segments (equilibration of the contour length), teq ù
tR;e , zN 2 a2 =kB T (cf. Eq. (46)). Thus the chain does not reptate until its internal equilibration
completes. In other words, the equilibration of the contour length is the pre-requisite for the reptation
to occur. The t eq is much longer than the unit time for reptation over the distance a, Dtp , zNa2 =kB T
(Eq. (57)), meaning that a coarse-grained chain of constant L can be utilized for description of the
equilibrium reptation motion only in time scales .t eq.
The generally expected CLF effects, enhancement of fast relaxation and reduction of the longest
relaxation time (both compared to the pure reptation case), are well represented by the H~ t given by Eq.
(100). However, we should also note an approximate nature of this H~ t obtained from Eq. (99):
Rubinstein and Colby [85] pointed out that Eq. (99) does not give the relationship for the pure reptation,
w t ù exp 2t=trep ; even in the limit of N ! ∞ (where the CLF effects vanish).
f
[134], Doi formulated a first passage problem to calculate a
In a more rigorous evaluation of trep
probability that a given tube segment has been visited by neither ends of the chain in a given interval of
f
is
time. From this probability, he evaluated w (t). The resulting trep
f
trep
ù trep 1 2 1:47N 21=2 2
101
f
is almost proportional to N 3.4 in a considerably wide range of N ( ù 5–100) [134].
This trep
3.4.2. Linear viscoelastic and dielectric properties
Linear viscoelastic and dielectric properties are calculated from w (t) through Eqs. (87) and (88).
Specifically, the longest viscoelastic and dielectric relaxation times derived from the Doi analysis [134] are
given by Eq. (101). The zero-shear viscosity is written, in terms of h rep for pure reptation (Eq. (65)), as
f
hrep
ù hrep 1 2 1:47N 21=2 3
102
f
f
; this h rep
is almost proportional to N 3.4 in a wide range of N.
As similar to trep
3.4.3. Diffusion properties
The CLF has been frequently presumed to induce no displacement of the center of mass and have no
effect on the diffusion coefficient DG of the linear chain. However, Deutsch and Madden [180] raised a
question for this interpretation, and Milner and McLeish [152] suggested that CLF (formulated in their
model) leads to DG , Drep 1 2 {O N 21=2 }21 with Drep being the pure reptation diffusion coefficient
(Eq. (72)). Thus the problem concerning the CLF effect on DG does not seem to have been well settled.
This problem is further discussed later in Section 4.1 in relation to the experimental data.
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1293
Fig. 7. Schematic illustration for (a, b) thermal constraint release process, (c) length-preserving local jump model, and (d)
length-variable local jump model. The slip-links in (c) and (d) represent the entanglements, and the small circles in (d) are the
monomeric segments. In (c) and (d), the link indicated with the thick dashed arrows is removed at a time tw (entanglement
lifetime) and reformed at a later time tw 1 tr at positions shown with the thick solid arrows.
3.5. Thermal constraint release models
Since the tube represents the constraint for a given chain (probe) from the surrounding chains
(matrix), the tube itself moves according to the motion of the matrix chains. This tube motion, neglected
in the DE model, is important in particular in polydisperse systems (e.g. blends).
The tube motion affects the probe dynamics in two different but related ways. The tube motion allows
a large-scale lateral motion of the probe (with respect to its backbone), i.e., the constraint release (CR)
[135,138–140]. The tube motion can also increase an effective tube diameter for the probe in a coarsegrained time scale, i.e. the dynamic tube dilation (DTD) [141,153].
This section explains models for thermal CR induced by equilibrium matrix motion. The models
considering the DTD for this equilibrium motion is explained later in Section 3.6. In the nonlinear
regime under large strains/fast flow, the matrix chains exhibit non-equilibrium motion that results in a
different type of CR relaxation of the probe. Convective CR (CCR) models formulated for this case is
explained in Section 3.8.
3.5.1. Thermal CR dynamics
Fig. 7a and b shows a conventional molecular picture for the probe motion induced by diffusion of the
tube-forming (entangling) matrix chains. When a matrix chain (unfilled thread and circle in Fig. 7a and
b) diffuses away, an entanglement segment of the probe acquires a freedom to locally jump. After this
jump, either the same or different matrix chain approaches the probe to reform the constraint for this
segment. Accumulation of this type of local jumps leads to the global CR motion of the probe.
Graessley [135] evaluated a mean waiting time tw for the local jump due to pure reptation of linear
1294
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
matrix chains (with no contour length fluctuation). The result can be written as
tw Ltrep N1
with L p2 =12z =z
103
where t rep(N1) is the reptation time of the matrix chain composed of N1 entanglement segments (cf. Eq.
(62)), and z is an average number of constraint per each entanglement segment. This tw is regarded as a
lifetime of the entanglement constraint.
Graessley assumed that the local jump occurs immediately after the local constraint is removed and
that the probe contour length is preserved during this jump [135]. Under these assumptions, the thermal
CR motion of the probe is described by a local bond-flip model for freely jointed rods each having the
constant length a and being constrained by the slip-link of the finite lifetime tw; see Fig. 7c [135].
Irrespective of details of the bond-flip stochastics, slow dynamic properties of this model coincide with
those of the Rouse model [18,135].
Thus, for the linear probe chain composed of N2 entanglement segments, the longest viscoelastic and
dielectric relaxation times, t CR,G and t CR,e , and the center of mass diffusion coefficient, DCR, obtained
from Graessley’s model are written as [135]
tCR;G
DCR
1
2t
2zLa2 3 2
N1 N2 / z0 m31 m22 m23
tCR;e w2 N22 4
e
2
p
p kB T
a2
p2 kB T 23 21
23 21 3
N N / z21
0 m1 m2 me
12Lz 1 2
12N2 tw
104
105
where m1 and m2 are the monomer numbers per matrix and probe chains, respectively, and z 0 is the
monomeric friction coefficient. Other dynamic properties are described by the Rouse equations shown in
Section 3.1 after a replacement of z by an effective friction coefficient for a tube segment ztube / tw ,
trep N1 : (ztube 12kB T Ltrep N1 =a2 in Graessley’s model). The same results (except the prefactor L )
were obtained from the models by Klein [138] and by Daoud and de Gennes [139].
Similarly, the CR process of a star probe chain having q arms of equal length can be described by the
Rouse–Ham [22] equations (for branched bead-spring chains). For this star probe having Na entanglement segments in each arm, the longest relaxation times, diffusion coefficient, and some viscoelastic
quantities appearing in Eqs. (16)–(19) are written in terms of z tube as
tCR;G
1
2z a2 Na2
tCR;e tube2
;
2
3p kB T
tG;p tCR;G =p2 ;
DCR
kB T
qNa ztube
hp q 2 1nkB T p odd;
2 15q 2 14
;
Je
5 3q 2 22 nkB T
106
hp nkB T p even
15q 2 14p2
t
ktG lw
60 3q 2 2 CR;G
107
108
where n is the chain number density. The difference of the relaxation intensities hp for the odd and even
modes (Eq. (107)) results from the degeneracy of the odd modes.
For the star probe having the type-A dipoles that are aligned in the same direction in each arm but are
inverted at the branching point, the dielectric behavior calculated from the Rouse–Ham model is
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1295
identical to the behavior of linear Rouse chains having the symmetrically once-inverted dipoles [181].
Thus, the dielectric behavior of this star probe relaxing via the CR mechanism is described by Eq. (47)
with t R,e and N being replaced by t CR,e (Eq. (106)) and 2Na, respectively, and q n 1 (for 0 , n , Na )
and 21 (for Na , n , 2Na ).
3.5.2. Comments for CR model
Klein [140] examined a condition under which a hydrodynamic interaction becomes important for CR
relaxation of the probe. He found this importance for the probe and matrix satisfying an inequality,
m2 . m1 m2e . m3e : Typically, me is ,O(10 2), and no experiment can be made for such a long probe chain
having m2 . 106 : Thus, the Rouse dynamics (with no hydrodynamic interaction) may be safely used for
description of the CR process if the probe contour length is preserved on the local jump due to the matrix
diffusion.
Klein [140] also examined the m1 dependence of tw. He considered a possibility of multiple constraints
for the probe due to one matrix chain. These constraints vanish simultaneously on the matrix diffusion,
2:5 21
resulting in an enhanced local jump with tw / trep N1 =m0:5
1 / z0 m1 me and the CR relaxation time
2 23
tCR / z0 m2:5
1 m2 me : However, Klein [140] and de Gennes [182] pointed out that the multiple
constraints are realized only for very long matrix chains having m1 . m2e , O 104 : For the probe
chain to actually exhibit this t CR, it should be much longer than the matrix chains m2 q m1 ; otherwise,
the probe fully relaxes via its own reptation before the CR relaxation occurs. Practically, no experiments
can be made for such extremely long probe and matrix chains. Thus, in an experimentally accessible
range, the multiple constraints are not important.
For tw, Klein [140] also considered the other possibility of a combined effect of many matrix chains
interacting with the me monomers in an entanglement segment of the probe: He conjectured that this
effect leads to tw / trep N1 =m0:5
1 : This combined effect, related to the number of the matrix chains
/ m0:5
1 that interpenetrate this segment, may occur in our experimental range. However, we should
remember that the CR relaxation is experimentally observed only when the matrix chains are much
shorter than the probe. For this case, the contour length fluctuation (CLF) effect cannot be neglected for
the matrix chains and Klein’s estimate of tw, obtained under absence of CLF, is to be further modified.
In a time scale longer than the CLF time of the matrix chain / m21 ; the effective length of the matrix
chain constraining the probe is estimated to be Leff ù Leq N1 2 DLeq N1 ; where DLeq(N1) is the average
fluctuation length of the matrix chain (cf. Eq. (98)). If we do not consider the combined effect explained
f
N1 ù trep N1 1 2 1:47N121=2 2 /
above, the entanglement lifetime tw is estimated to be tw / trep
21:4
f
; where trep
N1 is the reptation time of the fluctuating matrix chain (cf. Eq. (101)). Applying
m3:4
1 me
Klein’s conjecture to this result, we obtain an estimate for the case of the combined effect, tw /
f
2:9 21:4
trep
N1 =m0:5
: Then, the t CR and DCR of the probe are given by
1 / z0 m1 me
2 23:4
tCR / z0 m2:9
;
1 m2 me
22:9 21 3:4
DCR / z21
m2 me
0 m1
109
The resulting m1 dependence is quite close to that in the original CR model (Eqs. (104) and (105)). Thus
the original and modified CR models, the latter accounting Klein’s conjecture and CLF, are experimentally indistinguishable, unless me is widely varied by changing the total polymer concentration.
All the above arguments just concern a rather minor change in the expression of tw. No change was
made for the essential CR feature, the probe motion obeying the Rouse dynamics with a local friction
1296
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
ztube / tw : However, if the probe contour length is not preserved on the local CR jumps, the feature of
the global CR relaxation is no longer described by the Rouse model.
Fig. 7d shows one possibility of this length-variable local jump [116]. The small circles indicate the
monomeric segments of the probe. Once the local constraint (slip-link) is removed at a time tw, the probe
exhibits a local jump according to its configuration just before this removal. Because of the probe
flexibility, this jump is not subjected to a restriction of preserving the probe contour length L.
Consequently, the jump could results in either elongated or shrunk conformation with fairly large
probabilities. After reformation of the slip-link at a later time tw 1 tr ; the probe tension is unbalanced
along its contour unless L is preserved on the jump. Then, the global motion of the probe is induced
along its backbone to equilibrate the tension. Finally, the entanglement density for the probe is adjusted
to recover its equilibrium value.
Accumulation of the above length-variable local jumps results in the global CR motion/relaxation.
This type of CR is similar to the contour length fluctuation (CLF) in a sense that the chain tension (or
changes in L) plays an important role. However, it should be also emphasized that CLF occurs even in
the fixed tube and is conceptually different from CR.
3.6. Dynamic tube dilation models
3.6.1. Tube dilation plus reptation
3.6.1.1. General In the dynamic tube dilation (DTD) models, the tube diameter increases with time. To
demonstrate the meaning of this increase, we make the hypothetical experiment explained in Section 2.1
As shown in Fig. 8, we place a linear chain composed of N entanglement segments (size a) in a field of
obstacles with an average separation a (circles). The internal equilibration time of this segment is tp
a2 z=3p2 kB T (Eq. (56)). We successively take photographs of the chain with the exposure time t0 for
each. For simplicity, we assume no contour length fluctuation.
If all obstacles are fixed, the chain reptates, with the curvi-linear diffusion coefficient Dc kB T=N z; in
a tube with the diameter a. For t0 tp ; the hypothetical photographs taken at the shot times t ù pDtp
p 0; 1; 2; … are schematically shown in Fig. 8a. Here, Dtp Na2 z=2kB T ( q t p; cf. Eq. (57)) is the
time for reptation over a distance a. The chain looks like a fuzzy thread of the width a and length Leq
Na; and this thread moves back and forth along its center line. In Fig. 8b, we increase the exposure time t0
to Dt p. The thread ends become wider and fuzzier because they freely explore the area of radius ù a at
the time t0, but the remaining part looks the same as that seen for shorter t0 (Fig. 8a). On a further increase
of t0, the thread becomes wider and fuzzier from the end toward its center, but the center portion looks
essentially the same until t0 approaches t rep of the chain.
Now, we set a lifetime tw of some obstacles below Dt p but above t p, allowing the thermal CR motion
of the chain. Once a short-lived obstacle disappears, a new short-lived obstacle emerges to preserve the
total obstacle number (as similar to the situation depicted in Fig. 7). In the photographs with t0 tp for
each (Fig. 8c; taken at t ù pDtp with p 0; 1; 2; …), the chain looks like a fuzzy thread of the width a
and length Leq because all obstacles effectively constrain the chain in the time scale of t p. However, in
the time scale of Dt p, the short-lived obstacles (filled circles) are not effective and the chain may move
rather freely until it hits the permanent obstacles (unfilled circles) having an average spacing a 0 (.a). If
the chain can explore, within the time Dt p, all local configurations in a spatial scale ,a 0 , the chain in the
photographs with t0 Dtp would look like a diffuser and shorter thread of the width a 0 and length L 0
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1297
Fig. 8. Hypothetical photographs of a chain taken at times , pDtp p 0; 1; 2; … with an exposure time t0 for each (Dt p time
for reptation over a distance a). In parts (a) and (b), the chain is constrained by fixed obstacles (unfilled circles) and looks like a
fuzzy thread of width a. This photographic image does not change much on an increase of t0 from the local Rouse equilibration
time t p (part a) to Dt p (part b). The chain reptates in a tube of diameter a. In parts (c) and (d), the chain is constrained by a
mixture of fixed and short-lived obstacles (unfilled and filled (gray) circles), the latter having a lifetime ,Dt p. The chain can
rapidly equilibrate itself in an enlarged tube formed only by the fixed obstacles (part c), and it looks like a wider and shorter
thread under long exposure with t0 Dtp (part d). This chain reptates in the dynamically dilated tube. For more details, see text.
aLeq =a 0 that moves back and forth along its center line (Fig. 8d). For this case, the chain reptates, with
Dc kB T=N z; in a large tube with the diameter a 0 . Namely, the tube for the chain is dynamically dilated
and shortened on an increase of t0 ( unit time of our observation).
Fig. 9 schematically shows some examples of the hypothetical photographs not showing this type of
behavior. In Fig. 9a and b, the chain is constrained only by the short-lived obstacles having the lifetime tw
between t p and Dt p. If this chain moves via the Rouse-type constraint release (CR) mechanism, the chain
in the photographs with t0 tp looks like a fuzzy thread of the width a and length Leq that exhibits
random, local flips (Fig. 9a; the photographs taken at t ù pDtp with p 0; 1; 2; …). For t0 Dtp .tp ;
the same chain looks like a thicker and shorter thread having the width a 00 , aN 2 t0 =tCR 1=4 .a and
length L 0 aLeq =a 00 that exhibits the local flips. (This a 00 is estimated from the Rouse-CR equilibration
time of b segments, tpp , b2 tw ) On a further increase of t0, the thread is further shortened and widened
1298
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
Fig. 9. Hypothetical photographs of a chain taken at times ptshot p 0; 1; 2; … with an exposure time t0 for each. In parts (a)
and (b), tshot is chosen to be ,Dt p (time for reptation over a distance a), and the chain is constrained only by short-lived obstacles
(filled (gray) circles) having a lifetime tw; Dtp . tw . tp (t p local Rouse equilibration time). This chain looks like a fuzzy,
randomly flipping thread, and the thread width and length increases and decreases, respectively, on an increase of t0 from t p
(part a) to Dt p (part b). The chain exhibits Rouse-like CR motion. In part (c), the chain is constrained by a mixture of fixed and
short-lived obstacles (unfilled and filled (gray) circles), the latter having a lifetime tw . Dtp : This chain looks like a fuzzy thread
of width a in the photographs with tshot tw and t0 Dtp : The thread moves along a tube of the diameter a and this tube
fluctuates in a larger tube formed only by the fixed obstacles. For more details, see text.
but still exhibits the same type of local flips (because of the lack of the intrinsic length scale in the Rouse
dynamics; see Section 3.1.2). Namely, no reptative motion in a dilated tube is observed.
In the other case discussed by Struglinski and Graessley [81], the chain is constrained by a mixture
of fixed and short-lived obstacles, the latter having the lifetime tw . Dtp : Fig. 9c shows the photographs of this chain taken at t ptw p 0; 1; … with the exposure time t0 Dtp for each, i.e. with
the same t0 as in Fig. 8d. Since the short-lived obstacles effectively constrain the chain in the time scale
Dt p, the chain in Fig. 9c looks like a thread of the width a and length Leq. This makes a contrast
between Figs. 9c and 8d. These obstacles cannot survive in a time scale .tw. Thus, in this time scale,
the chain reptates in a tube of the diameter a and this thin tube fluctuates in the larger tube formed only
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1299
by the permanent obstacles; see Fig. 9c. Namely, the chain does not reptate with Dc kB T=N z along
this larger (dilated) tube.
3.6.1.2. Condition for DTD For solutions of probe chains in low molecular weight solvents, experiments [1,2] indicate that the entanglement mesh size asol scales as asol ay2a=2 a 1 2 1:3 where a
and y are the bulk mesh size and the probe volume fraction, respectively. The tube diameter a 0 for the
probe chain in blends can increase up to this asol. However, as demonstrated in Fig. 9, the probe does not
always reptate with Dc kB T=N z in this dilated tube. For binary blends of linear probe and matrix
chains composed of N2 and N1 (,N2) entanglement segments, respectively, Doi et al. [142] and Viovy
et al. [144] discussed the conditions for this reptation to occur. Their results, deduced under an
assumption of no contour length fluctuation, are summarized below for the case of a 1:
Conditions by Doi et al.: Doi et al. [142] modeled the tube as a Rouse chain composed of two types of
segments, one representing the entanglements between the probe and matrix and the other, the entanglements among the probes. They compared the mean-square displacement of this Rouse-tube segment
[dt(t)] 2 with that of a free (non-entangled) probe chain [dc(t)] 2 to estimate the dilated tube diameter a 0 .
(The dependence of d on the segment index n is not explicitly shown here.)
For [dt(t)] 2, Doi et al. [142] used the full Rouse expression including the local and global diffusion
2
d / t; the Rouse fluctuation d2 / t1=2 ; and the vibration between probe–probe entanglement points
d 2 / t0 ; each observed at a specific region of t. For [dc(t)] 2, no fluctuation was considered, i.e.
dc t2 / t in the entire range of t. This [dc(t)] 2 coincides with [dt(t)] 2 at a critical time tc (dc2 , dt2 at
t , tc and dc2 . dt2 at t . tc ). Arguing that the chain begins to feel the tube constraint at this tc, Doi et al.
[142] estimated the dilated tube diameter as a 0 d c tc : The a 0 thus obtained and the corresponding
terminal viscoelastic relaxation time of the probe, t G, change with N2, N1, and y 2 (the probe volume
fraction). Neglecting numerical prefactors, we can summarize the results as [142]
No dilation:
a 0 a and tG , trep N2 / N23
for N2 N123 , 1 any y 2
110
Restricted dilation:
a 0 asol and tG , y 2 trep N2 / y2 N23
for N2 N123 . y 21
2
111
Free dilation:
a 0 aN21=2 N123=2 a , a 0 , asol and tG , N22 trep N1 / N13 N22
23
for y 21
2 . N2 N 1 . 1
112
In the restricted dilation regime, the tube fully dilates to have the maximum a 0 asol ay 221=2 and a
further dilation is restricted by the mutual entanglements of the probe chains. In the free dilation regime,
the tube partially dilates to have a 0 , asol ; and the dilation up to this a 0 is free from the effect of the
probe-probe entanglements.
The above results suggests the lack of Rouse-type CR relaxation of the probe [142]; the probe always
relaxes via reptation with Dc kB T=N2 z; either in the non-dilated, partially dilated, or fully dilated tube.
This is the case even for dilute probes y 2 N2 , 1 entangled only with much shorter matrix chains,
although t G and the terminal relaxation mode distribution of these probes (in the free dilation regime)
are the same as those for the Rouse-CR relaxation. An additional point to be noted is the crossover from
1300
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
the free dilation regime to the restricted dilation regime with increasing y 2. For the probe in much shorter
matrix chains N2 N123 . 1; this crossover occurs at yc N221 N13 :
Comments for Eqs. (111) and (112): In the molecular picture of dynamic tube dilation, successive
0 2 2
(a ) /a entanglement segments are coarse-grained into an enlarged segment (of the size a 0 ). Furthermore, the chain composed of these enlarged segments is considered to reptate along its contour. This
coarse-graining of the spatial scale is associated with the coarse-graining of the time scale (see Section
2.1). From this point, we here examine the self-consistency of the results of Doi et al. [142] (Eqs. (111)
and (112)).
If the chain does not equilibrate its tension, only local equilibration of the (a 0 ) 2/a 2 segments is required
for the chain to reptate in the dilated tube. (This situation is similar to that explained in Section 3.2.2.)
The time for this equilibration, tpp , a 0 2 =a2 2 trep N1 ; gives the unit of the coarse-grained time scale.
This t pp is shorter than t G in the restricted/free dilation regimes considered by Doi et al. For this case,
Eqs. (111) and (112) are self-consistent within their argument of utilizing [dc(t)] 2 / t to determine a 0 as
a 0 dc tc dt tc : (Then, the chain reptates in the dilated tube at times longer than both t pp and Dtpp
a 0 2 =2Dc ; the latter giving the time for reptation over the distance a 0 .)
However, in reality, the chain should equilibrate its tension through its global motion. Then, the
molecular picture of reptation in the dilated tube would be valid only in time scales longer than the time
required for equilibration of the chain contour length measured along the dilated tube, tppp ,
N22 trep N1 : (This situation is similar to that explained for the CLF model.) This t ppp is identical to t G
in the free dilation regime. For this case, the reptation in the dilated tube is not a self-consistent picture
within the argument of Doi et al. Specifically, the dilute probe y 2 N2 , 1 entangled only with much
shorter matrix chains should fully relax during this global equilibration process via the CR mechanism.
Conditions by Viovy et al.: Differing from Doi et al. [142], Viovy et al. [144] utilized the full Rouse
expression for [dc(t)] 2 of the chain. Comparing this [dc(t)] 2 with [dt(t)] 2 of the tube, Viovy et al.
concluded that the probe in the entangling matrix does not reptate with Dc kB T=N2 z in the dilated
tube, i.e. no tube dilation occurs in the sense considered by Doi et al. [142]. Instead, the tube confining
the probe always has the diameter a and exhibits various type of motion according to the N2, N1, and y 2
values.
Neglecting numerical prefactors, the terminal relaxation time t G obtained by Viovy et al. [144] is
summarized as
Chain reptation:
tG , trep N2 / N23
for N2 N123 , 1 and N23 N123 , y 22
chain reptation I
2
3
3 2
and for y 21
2 , N1 , N2 y 2 chain reptation II
(113)
Tube reptation:
tG , y 2 trep N1 N23 / y 2 N13 N23 for N2 N123 . 1 and N221 , y 2 , N123
114
Tube Rouse (CR):
tG tCR / N13 N22 for N2 N123 . 1 and y 2 , N221
115
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1301
Fig. 10. Schematic illustration of an initial, enlarged tube for a linear chain reptating in a dynamically dilated tube. The hatching
indicates the surviving portion of this initial tube having the fraction w 0 (t) (length w 0 (t)L 0 (t)), and the filled (gray) and unfilled
circles indicate the entanglement segments of the chain at times 0 and t. For more details, see text.
In the chain reptation regime (Eq. (113)), the terminal relaxation of the probe occurs via reptation (with
Dc kB T=N2 z) over a distance Leq N2 a along the tube with the diameter a, and this tube can fluctuate
in an enlarged tube of a diameter a 0 asol ; the supertube in the terminology of Viovy et al. [144]: The
situation shown in Fig. 9c is included in this regime. In the tube reptation regime (Eq. (114)), the tube
behaves as a hypothetical Rouse chain (having a local friction ztube / tw / trep N1 ) that reptates in this
supertube, and the probe relaxes via this tube reptation. In the tube Rouse regime, this hypothetical chain
freely moves and the probe relaxes via the Rouse-CR mechanism. (The t G’s in the latter two regimes are
shorter than t rep(N2). The probe chain chooses the fastest available mode to relax.)
Thus, differing from the molecular picture of Doi et al. [142], the Rouse-CR is deduced by Viovy et al.
[144] for the dilute probe y 2 N2 , 1 in much shorter matrix chains. In addition, for the probe entangled
with much shorter matrix chains, the cross-over from Eq. (115) to Eq. (114) and further to Eq. (113) with
increasing y 2 is observed at yc N221 and y 0c N123 ; respectively.
3.6.1.3. Marrucci model Marrucci [141] first developed a concept of dynamic tube dilation (DTD) and
formulated a model that allows self-consistent calculation of G(t) on the basis of this concept. Although
he did not specify the condition required for DTD and arguments [153] were made for this point, his
model includes basic ideas utilized in later, more elaborated tube dilation models. Considering this
importance of the Marrucci model, we here summarize its features.
For a probe chain composed of N entanglement segments (of size a), the enlarged (dynamically
dilated) tube is defined at respective t (.0). This tube is composed of N 0 (t) enlarged segments of the
size a 0 (t) ( dilated tube diameter), and each of these segments includes b (t) entanglement segments,
where N 0 t Na2 =a 0 t2 and b t a 0 t2 =a2 : The central quantity in the Marrucci model is a
fraction of the initial, enlarged segments that survive at the time t, w 0 (t).
The meaning of this w 0 (t) is schematically explained in Fig. 10. The filled (gray) and unfilled circles
1302
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
indicate the entanglement segments of the chain at times 0 and t, respectively. The enlarged tube at the
time t has the diameter a 0 b1=2 a: As a reference for this tube, we combine each b entanglement
segments at the time 0 into an enlarged segment to define the initial, enlarged tube of the diameter a 0
and length L 0 ( a 0 N 0 ). At the time t, the hatched portion of this initial, enlarged tube still contains the
chain. The w 0 (t) is defined as a ratio, L 0f =L 0 ; where L 0f is the length of this portion of the enlarged tube.
If the tube is fixed, this w 0 (t) is identical to the surviving fraction w (t) of the non-dilated tube of the
diameter a; this w (t) in turn represents the fractional memory of the initial chain orientation. However,
when the tube dynamically dilates, w 0 (t) is not identical to w (t), because of the mutual equilibration of b
entanglement segments in each enlarged tube segment. This point is explained in more detail later for the
viscoelastic properties of monodisperse systems.
Equilibrium dynamics: Introducing the curvi-linear length coordinate s along the enlarged tube with
the length L 0 (t) ( Na 2/a 0 ), we define the number density of this tube segment surviving at s, C 0 (s,t)
0 , s , L 0 t: Marrucci described the time evolution of this C 0 (s,t) by [141]
2C 0
22 C 0
1 dL 0 2 sC 0
2
Dc
L 0 dt
2s
2t
2s2
116
The first and second terms in the rhs of Eq. (116) represent the memory decay via usual diffusion and
convection, respectively. Eq. (116) is solved under the boundary and initial conditions, C 0 s; t 0 for
s 0 and L 0 (t) and C 0 s; 0 1=Leq ; and the C 0 s; t thus calculated is integrated to obtain w 0 (t) [141].
The results can be written in terms of the equilibrium contour length Leq ( Na) and pure reptation time
t rep(N) (Eq. (62)) as
!
2
Zt Leq 2
ZL 0
X
8
p
117
w 0 t
C 0 s; t ds
exp 2
dt 0
0 0
2 p2
t
N
L
t
p
0
0
rep
podd
Specifying a relationship between w 0 (t) and L 0 (t), we can explicitly obtain w 0 (t) and calculate various
dynamic properties.
Some comments need to be added for Eq. (117). As pointed out by Marrucci [141], Eq. (117) makes
sense only in a range of t where L 0 t q a 0 t: (The molecular picture of reptation fails when L 0 t
a 0 t N 1=2 a and the dilated tube is composed of only one large segment with the size N 1/2a.) In
addition, the model a priori assumes the reptation in the dilating tube and is to be used in time scales
longer than that for the equilibration of the chain in this tube (cf. comments for Eqs. (111) and (112)).
Viscoelastic properties of monodisperse systems: For a monodisperse system (with the chain number
density n ), we apply a small step shear strain g at t 0: The linear relaxation modulus of the Marrucci
model is written as [141]
G t
4
nk TN 0 tw 0 t
5 B
118
Here, N 0 (t) is the number of the enlarged segments per chain at the time t, and w 0 (t) is the surviving
fraction of these segments explained in Fig. 10.
In solutions with the polymer volume fraction y , the entanglement mesh size asol scales as asol
ay2a=2 a 1 2 1:3 [1,2]. Marrucci assumed that the fully relaxed portion of the chain (the portion out
of the initial, enlarged tube) behaves as the solvent. Then, we have a 0 t aw 0 t2a=2 : The corresponding expressions for N 0 (t), L 0 (t), and the number b (t) of the entanglement segments in an enlarged tube
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1303
segment are given by
N 0 t Nw 0 ta ;
L 0 t Leq w 0 ta=2 ;
b t w 0 t2a
119
From Eq. (119), Eq. (118) becomes [141]
G t GN w 0 t11a
with GN
4
nNkB T
5
120
A closed equation for w 0 (t) is obtained from Eqs. (117) and (119). Retaining only the lowest order
term (with p 1) in Eq. (117), Marrucci solved this equation to obtain w 0 (t), from which G(t) is
calculated as [141]
G t GN 1 2 t=trep N2
for a 1
121
In a range of t # 0:4trep N; this G(t) is not significantly different from a single-exponential function,
GN exp22:5t=trep N: This result means that the dynamic tube dilation formulated in Marrucci’s way
accelerates the relaxation of monodisperse chain by a factor of 2.5 compared to the no dilation case (pure
reptation case).
Here, some comments need to be added for Eq. (120). Among the N entanglement segments, only
Nw 0 (t) segments staying in the initial, enlarged tube (hatched portion in Fig. 10) contribute to G(t). In the
Marrucci model, these Nw 0 (t) segments are (implicitly) assumed to have partially relaxed in a way that
successive b (t) segments are instantaneously equilibrated at any t under a constraint of preserving a
vectorial sum of their bond vectors. (In other words, the b (t) segments are assumed to be instantaneously
coarse-grained into a larger stress-generating unit; see Section 2.2.3.) Thus the fractional memory of the
initial chain orientation is given by w t w 0 t=b t ( w 0 t11a ; cf. Eq. (119)), not by w 0 (t) itself. This
w (t) is identical to an average
RN of the orientation function S(n,t) defined for the entanglement segments
(Eq. (14)), w t 1=NS0 0 S n; t dn (S0 is the n-independent initial value of S). Applying the stress–
optical rule (Eq. (13)) to this w (t), we find G t 4=5nNkB T w t 4=5nNkB Tw 0 t11a : This G(t) is
identical to that given in Eq. (120), indicating that the stress expression of the Marrucci model is
consistent with the stress–optical rule (under the assumption of the instantaneous equilibration of the
b (t) entanglement segments).
As explained in the “comments” for Eqs. (111) and (112), these b (t) segments actually have finite
equilibration times: tpp , tw b t2 (with tw entanglement lifetime) for their mutual equilibration in
the enlarged (dilated) tube segment and tppp , tw N 2 for the equilibration of the chain contour length
measured along the dilated tube. Thus the Marrucci expression of G(t) (Eqs. (118) and (120)) is valid
only in time scales .t pp, and the reptation in the dilated tube (the model assumption) would occur only
at times .t ppp. Milner et al. [156] made a more detailed argument for the validity of the tube dilation picture.
Dielectric properties of monodisperse systems: We consider here monodisperse chains having
non-inverted type-A dipoles. Marrucci [141] did not examine the dielectric properties of these
chains. However, we can utilize his result to readily calculate the dielectric relaxation function F (t) [183].
Utilizing the bond vectors u(n,t) of the entanglement segments of the size a, we can write F (t) of the
above monodisperse system as (cf. Eqs. (23) and (24))
F t
N X
N
1 X
ku n; t·u n 0 ; 0l
2
Na n1 n 0 1
122
1304
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
Now, we combine every successive b segments into an enlarged segment having the bond vector u 0 ,
ib
X
u 0 i; t
u n; t;
i 1; 2; …; N 0 N=b
123
n1 1 i 2 1b
In any time scale, the F (t) given by Eq. (122) is rewritten in terms of this u 0 as
0
0
N X
N
X
1
F t 0 0 2
ku 0 i; t·u 0 j; 0l
N a i1 j1
with a 0 2 ba2 ku 02 l
124
This result indicates that the F (t) value does not change even if the b segments are mutually equilibrated
in each enlarged segment under the constraint of preserving u 0 . This feature of F (t) is different from the
feature of the relaxation modulus G(t); the mutual equilibration decreases the G(t) value by the factor
b 21. (This difference between F (t) and G(t) is related to a fact that correlation of different segments is
included in F (t) but not in G(t), the latter detecting a sum of orientational anisotropy of individual
segments; cf. Eqs. (13) and (14).)
Considering the above feature, we can calculate F (t) of the chain that reptates in the dilating tube.
Under the situation depicted in Fig. 10, we choose the size of the above enlarged segment to be identical
to the dilated tube diameter. These segments preserve their initial memory when they are in the surviving
portion of the dilated tube (hatched portion). Thus the averages in Eq. (124) are given by ku 0 i; t·u 0 j; 0l
a 0 2 if the i-th and j-th enlarged segments at times t and 0 are located at the same position in this surviving
portion. For the other cases, ku 0 i; t·u 0 j; 0l 0: From these results, we find [183]
1 X0 X0
F t 0
d 0 w 0 t
125
N i j 0 ij
P
where the summation 0 is taken for the enlarged segments in the surviving portion of the dilated tube.
This result indicates an interesting relationship between the dielectric and viscoelastic properties of the
chain in the dilating tube (cf. Eqs. (120) and (125))
G t=GN F t11a ù F t2
126
This relationship, deduced from the general arguments for the expressions of F (t) and G(t), is valid for
the dominant part of relaxation (at tp a , t , t1 with t p(a) being given by Eq. (56)) irrespective of
details of the chain motion in the dilating tube [183]. In other words, Eq. (126) holds not only for the
Marrucci model but also for the other models considering a chain that explores all local configurations in
the enlarged tube but does not reptate along this tube, e.g. the model by Viovy et al. [144] (for the
monodisperse systems that are in the chain reptation regime; Eq. (113)).
Viscoelastic properties of blends: We here consider a blend composed of linear chains. The i-th chain
is composed of Ni entanglement segments of the size a, and its number density is n i. Marrucci considered
reptation of the chains in respective dilating tubes to formulate the model for the blend [141]. The
surviving fraction of the dilated tube segments for the i-th chain at the time t, defined in the way
explained in Fig. 10, is denoted by w 0i t: An average of these w 0i t is defined by
X
w 0 t
yi w 0i t
127
i
where y i of the volume fraction of the i-th chain component in the blend.
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1305
Marrucci considered that the dilated tube diameter is the same for all components and is determined
by this average w 0 as a 0 t aw 0 t2a=2 a 1–1:3: Then, the number of the enlarged segments and
the dilated tube length for the i-th chain at the time t, N 0i t and L 0i t; are given by (cf. Eq. (119))
N 0i t Ni w 0 ta ;
L 0i t Leq;i w 0 ta=2
Leq;i Ni a
128
The w 0i t is related to this L 0i t through an equation similar to Eq. (117), and L 0i t is related to w 0 t
though Eq. (128). Thus, for the case of a 1; w 0i t; is determined by w 0 t as [141]
!
X
8
p2 Zt dt 0
0
w i t
exp 2
129
2 2
trep Ni 0 w 0 t 0
podd p p
Combining this equation with Eq. (127), we can explicitly calculate w 0i t and w 0 t:
The relaxation modulus of the blend is expressed as a linear combination of the contributions from all
chain components (cf. Eq. (118))
G t
X4
ni N 0i tkB T w 0i t
5
i
130
(This expression reflects
the stress additivity, Eqs. (4) and (7).) From Eqs. (127) and (128) and an
P
equality, yi ni Ni = j nj Nj ; Eq. (130) is rewritten (for the case of a 1) as [141]
"
#2
X4
X
yi w 0i t GN w 0 t2 ;
GN
nNk T
131
G t GN
5 i i B
i
i
Retaining only the lowest order term p 1 in Eq. (129), Marrucci calculated G(t) from Eqs. (127),
(129), and (131). For binary blends of long probe chains and much shorter matrix chains, the calculation
demonstrated a two-step relaxation of G(t) [141]. The relaxation of the matrix chains results in the
dilation of the tube for the probe to induce partial relaxation of the probe.
The first-step relaxation of G(t) (at short t) corresponds to this relaxation of both matrix and probe.
(The matrix relaxation is slower in the blend than in the pure matrix system, because the longer probe
chains retard the dilation of the tube for the matrix chains in the blend.)
At long t, the tube for a given probe chain is formed only by the other probe chains. The second-step
relaxation of G(t) corresponds to the probe reptation in this tube that dilates with t. In the Marrucci
model, the matrix chains behave as the solvent during the second-step. Thus the relaxation intensity
(plateau height of G(t)) for this step scales as y 22 (square of the probe volume fraction) and the terminal
relaxation time of the probe, as y 2.
3.6.2. Tube dilation plus retraction/length fluctuation
After the Marrucci model [141], refined tube dilation models were developed for monodisperse star
chains [153,154] and their blends with linear chains [156]. The dilation occurs more easily for the star
arms than for the linear chains for the following reason: The relaxation mode distribution is much
broader for the star arms than for the linear chains, and the intensive fast modes of the arm enhance
the tube dilation in the time scale for the terminal relaxation, t arm [153,156]. In addition, for a sufficiently
long arm, the time required for the mutual equilibration of its entanglement segments would be much
1306
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
Fig. 11. Schematic illustration of an initial, enlarged tube for a star arm retracting in a dynamically dilating tube. The hatching
indicates the surviving portion of this initial tube having the fraction w 0 (t) (length w 0 (t)L 0 (t)), and the filled (gray) and unfilled
circles indicate the entanglement segments of the arm at times 0 and t. For more details, see text.
shorter than t arm. This means that the mutual equilibration, the pre-requisite for the retraction in the
dilating tube, occurs rapidly to allow the arm to easily explore all local configurations in the dilated tube.
Considering the above importance of the tube dilation, we here summarize features of the models for
the monodisperse star chains [153,154]. A brief explanation is added also for a related model for contour
length fluctuation of linear chains [152].
3.6.2.1. Ball–McLeish model In the original Ball–McLeish (BM) paper for monodisperse star chains
[153], the tube dilation dynamics is described in terms of the molecular weight for the relaxed portion of
the arm. Here, we utilize the curvi-linear length coordinate z to describe this dynamics so that the BM
model can be directly compared with the PH model [21]. Fig. 11 explains the definition of z: the filled
(gray) and unfilled circles indicate the entanglement segments (of size a) at the times 0 and t, respectively. Our z is the coordinate measured along the initial path of the entanglement segments (gray
circles), not along the enlarged tube. This z is identical to the coordinate utilized in the PH model
(Section 3.3.2).
Some of the initial, enlarged tube segments survive at the time t in the sense explained for the
Marrucci model (Section 3.6.1.3). For a given coordinate z for the abandoned portion of the initial
tube (cf. Fig. 11), the fraction w~ 0 of these surviving segments is written as
w~ 0 1 2
z
;
Leq
Leq Na a
132
Here, Leq is the equilibrium contour length of the arm composed of Na entanglement segments.
In the BM model, a relaxation time t (z) for the segment at z is evaluated from an activation formulas
for an infinitesimal retraction from z to z 1 dz; [153]
dt z
dU
dz t zexp
133
t z 1 dz t z 1
dz
kB T
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1307
Fig. 12. Comparison of the activation barriers UDK, UBM, UMM for the star arm retraction utilized in the Doi–Kuzuu and
Pearson–Helfand models, the Ball–McLeish model, and the Milner–McLeish model, respectively. Reprinted with permission
from Macromolecules 1997;30:2159. q 1997 American Chemical Society [154].
The dU is the activation barrier for this retraction that is expressed, by use of the Doi–Kuzuu (DK)
potential (Eq. (89)), as
dU
2n 0 kB T
Na w~ 0 z dz
{Leq }2
134
Here, the term n 0 Na in Eq. (89) has been replaced by n 0 Na w~ 0 ; with Na w~ 0 being the number of enlarged
(dilated) segments in the arm (cf. Eq. (119) with a 1). The coefficient n 0 , left as an adjustable
parameter in the DK and PH models, has the Gaussian value 15/8 in the BM model.
Considering Eq. (132), we can integrate Eqs. (133) and (134) to find [153]
" 2
#
UBM z
z
2z3
p
0
;
UBM z n Na kB T 2 2 3
135
t z t aexp
kB T
Leq
3Leq
where t p(a) is the Rouse relaxation time of one entanglement segment (Eq. (56)). From this result, the
longest relaxation time is found to be
" 0 #
n Na
tarm t Leq tp a exp
136
3
Fig. 12 compares the BM potential UBM (Eq. (135)) with the DK potential UDK (Eq. (89)), both
calculated for n 0 15=8: Clearly, the dynamic tube dilation makes UBM much shallower than UDK.
Consequently, t arm is much shorter for the BM model (Eq. (136)) than for the PH model (Eq. (93)):
For the given n 0 value, tarm BM=tarm PH , exp 22n 0 Na =3 ! 0 for Na ! ∞.
The relaxation modulus of the BM model is written, in terms of t (z) (Eq. (135)), as [153]
"
# 2 ZLeq
z
t
exp 2
12
dz
137
G t GN
Leq 0
Leq
t z
1308
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
This G(t) represents a situation that the modulus sustained by a fragment of the chain in the dilated tube
at z, dG ud{ w~ 0 2 GN }u 2GN {1 2 z=Leq }dz=Leq (cf. Eq. (132)), relaxes at a rate 1=t z: For the
dominant part of relaxation (at tp a , t , tarm ; Eq. (137) gives the simple DTD expression G t ù
GN w 0 t2 where w 0 (t) is an average survival fraction of the dilated tube that is determined from the
solution of an equation t zp t t as w 0 t 1 2 zp t=Leq [153]. (Note also that Eq. (137) is consistent with the stress–optical rule because of the internal equilibration of the chain in the dilated tube, as
discussed for the Marrucci model.) The viscosity and compliance calculated from Eq. (137) are
!
n 0 Na
n 0 Na
p
0
21
;
Je
h0 GN t an Na exp
138
3
2GN
3.6.2.2. Refined model for monodisperse star chains Milner and McLeish [154] refined the BM model
by considering (1) the thermal fluctuation of the arm contour length, (2) a solution of the first passage
problem that gives a more accurate expression of t (z) than Eq. (135), and (3) the dilution exponent
suggested by Colby and Rubinstein [184], a 4=3 in Eq. (119) (instead of a 1 utilized in the BM
model).
For point (1), Milner and McLeish [154] focused the arm retraction over a small distance
z p Leq Na a: This shallow retraction occurs via the Rouse fluctuation free from the activation
barrier U z p kB T: Considering that the branching point of the arm does not influence the shallow
retraction and thus the time t sh(z) for this retraction is independent of Na, they evaluated t sh(z) as
!4
225p3 tp aNa4 z
225p3 tp a 4
tsh z
z
139
Leq
256
256a4
Here, t p(a) is the Rouse equilibration time of an entanglement segment (Eq. (56)).
For large z (deep retraction), the arm end feels the barrier. Considering the above point (3), Milner
and McLeish expressed the barrier as [154]
"
!a11
!#
15Na kB T
z
a 1 1z
;
11
a 4=3
140
UMM z
12 12
4 a 1 1 a 1 2
Leq
Leq
This UMM is shallower than UBM (Eq. (135)); see Fig. 12. Solving the first passage problem for the arm
end under the barrier UMM (the point (2)), they evaluated the time t dp(z) required for the deep retraction
by the distance z. The result is [155]
U
z
tp aNa3=2 p5=2 exp MM
kB T
tdp z ù
a 4=3
141
!"(
)2a 2a= a11 #1=2 ;
22 z
z
1
4
1
4
a
12
301=2
1G
Leq
Leq
a11
15Na
(Even for the case of a 1; this t dp(z) is considerably shorter than t (z) of the BM model.)
Milner and McLeish further combined this t dp(z) with t sh(z) (Eq. (139)) to obtain an (approximate)
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
expression of t (z) in the entire range of z [154,155]
U
z
tsh zexp MM
kB T
t z ù
tsh z
UMM z
11
exp
kB T
tdp z
1309
142
The crossover from the shallow retraction (Eq. (139)) to the deep retraction (Eq. (141)) occurs at
z , Na1=2 a (,thermal fluctuation length of the arm; cf. Eq. (98)). Utilizing this t (z), the relaxation
modulus of the Milner–McLeish model for the star chains is written as [154]
"
#a a 1 1 ZLeq
z
t
G t GN
12
exp 2
a 4=3
143
dz;
Leq
Leq
t z
0
(The modulus sustained by the chain fragment in the dilated tube at z, dG ud{ w~ 0 11a GN }u
a 1 1GN {1 2 z=Leq }a dz=Leq (cf. Eq. (132)), relaxes at the rate 1/t (z).)
Milner et al. [156] extended the above model to blends of star and linear chains. The tube for a given
star arm (probe) is formed by the other arms and linear matrix chains at short times, and only by the other
arms at long t (where the matrix chains have relaxed). This tube dilates in two steps; the first step dilation
at short t results from the motion of the tube-forming arms and matrix chains, and the second step
dilation at long t is due only to the arm motion. In these time scales, the probe arm can explore all local
configurations in the dilated tube segment. This allows the arm to relax via its retraction in the dilating
tube. However, at intermediate t, the arm relaxes via the Rouse-CR modes because it does not have a
sufficient time to explore all local configurations in the segment that is more dilated than in the first step.
This behavior at intermediate t in turn demonstrates the necessity of this exploration for the tube dilation
picture to be valid [156]. (The exploration is equivalent to the mutual equilibration of successive
entanglement segments explained for the Marrucci model.)
3.6.2.3. Model for CLF of monodisperse linear chains Milner and McLeish [152] also formulated a
model for monodisperse linear chains by applying the above tube dilation picture to the contour length
fluctuation (CLF). They regarded the linear chain as a two-arm star with each arm having the equilibrium
length Leq/2 (with Leq Na being the equilibrium length of the whole chain). Then the CLF becomes
equivalent to the arm retraction.
With this idea, Milner and McLeish [152] formulated the CLF contribution to the relaxation modulus
G(t) as (cf. Eq. (143))
"
# 2 Zzd
z
t
12
exp 2
dz
144
GCLF t GN
Leq =2 0
Leq =2
tsh z
Here, t sh(z) is the time for the shallow retraction (Eq. (139)). Differing from the star chain, the linear
chain can reptate to fully relax before the deep retraction occurs. Milner and McLeish [152] expressed
this situation by introducing, in Eq. (144), a cut-off distance zd above which the retraction becomes
slower than the reptation. (In addition, they utilized a 1 in Eq. (144) for simplicity; GCLF(t) is not
significantly different for the two a values, 4/3 and 1.)
After the above CLF process, the surviving portion of the tube has a length Leq 2 2zd and the
relaxation of this portion occurs dominantly via reptation. The time t 0rep necessary for this relaxation
1310
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
is written in terms of the pure reptation time t rep (Eq. (62)) as t 0rep 1 2 2zd =Leq 2 trep : Thus, Milner
and McLeish expressed the reptation contribution after CLF as [152]
"
#2
!
X
2zd
8
tp2
145
exp 2 0
Grep t GN 1 2
Leq podd p2 p2
t rep
Here, GN is the plateau modulus (Eq. (63)), and the factor 1 2 2zd =Leq 2 accounts for the decrease of the
modulus due to CLF.
Milner and McLeish also considered the contribution of Rouse modes of monomeric segments (cf. Eq.
(42)) [152]
!
!
m=m
m
Xe
X
1
tp2
tp2
GRouse t nkB T
1 nkB T
146
exp 2
exp 2
3
tR;G
tR;G
p1
pm=m 1 1
e
Here, n is the chain number density, m and me are the monomer number in the whole chain and in each
entanglement segment, and t R,G is the Rouse relaxation time (Eq. (41)). In Eq. (146), fast Rouse modes
corresponding to the monomeric motion at scales ,a have a full contribution to GRouse while slow modes
(the motion at scales .a) are assumed to have one third contribution in their intensities because only
longitudinal modes (along the tube) are effectively contributing to GRouse.
Finally, assuming an additivity of all above contributions (Eqs. (144)–(146)), Milner and McLeish
expressed G(t) of their model for the linear chains as [152]
G t GCLF t 1 Grep t 1 GRouse t
147
3.7. Combination of tube motion and other dynamic modes
In the generalized tube models, the tube itself is allowed to move (see Sections 3.5 and 3.6). The
constraint release (CR) and dynamic tube dilation (DTD) resulting from this tube motion are competing
with reptation and/or arm retraction. This competition is to be formulated for structural quantities of
respective entanglement segments, orientation function S(n,t), local correlation function C(n,t;n 0 ), and/
or the tube survival density C 0 (s,t). However, this formulation is not always made, and some models
describe the competition under certain approximations (or assumptions). This section summarizes these
approximations/assumptions and the corresponding limitations of those models.
3.7.1. Combination of DTD with reptation/arm retraction
In the Marrucci model [141], the effect of DTD on reptation is expressed as the convection term in the
time evolution equation for the tube survival density (Eq. (116)). In the Ball–McLeish [153] and
Milner–McLeish [154] models, the DTD effect on the arm retraction is included in the activation barrier
for the retraction (Eqs. (135) and (140)). Thus these models consider the competition of DTD with the
reptation/arm retraction modes in a fundamental level.
Of course, these models are to be applied only for the chains satisfying the pre-requisite for the
reptation/retraction in the dilating tube, the internal equilibration in the dilated tube segments (exploration of all local configurations in these segments). The models are valid only in time scales longer than
the equilibration time (see Section 3.6.1.2), as also emphasized by Milner et al. [156].
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1311
3.7.2. Double reptation
For linear chains, des Cloizeaux [146,147] proposed a so-called double reptation model that is related,
in some sense, to the DTD models. For blends in which the i-th chain component has the volume fraction
y i, the double reptation model considers the relaxation modulus to be give by
G t GN
X
i
X
2
2
yi w 00i t GN
yi {m0i t}1=2
148
i
Here, w 00i t is a surviving fraction of the tube for the i-th chain defined in a certain way, and m0i t is a
normalized relaxation modulus of this chain in its pure (monodisperse) state. The models by Tuminello
[145] and Tsenoglou [148] can be also written in the form of Eq. (148).
One may attempt to justify Eq. (148) by saying that the entanglement is the two-body interaction and
G(t) is given by a sum of the product w 00i tw 00j t because the stress sustained by the entanglement
between the i-th and j-th chains relaxes immediately when one of these chains diffuses away [146].
However, this statement needs to be carefully examined.
If w 00i t is the surviving fraction of the non-dilated tube in the blend, w 00i t coincides with an integral of
the orientation function Si(n,t) of the i-th chain with respect to n. Then, Eq. (148) severely violates the
stress–optical rule (Eq. (13)) and does not have a sound physical meaning.
If we interpret w 00i t to be the surviving fraction of the dilated tube defined in the way explained in Fig.
10, Eq. (148) is consistent with the stress–optical rule (see Section 3.6.1.3). Then, however, Eq. (148)
cannot describe the expected acceleration of the long chain relaxation in matrices of shorter chains. (Eq.
(148) predicts that the terminal relaxation time of the longest chain component in the blend is identical to
that in its pure state.)
Mead [150] defined w 00i t as the tube survival fraction in a hypothetical matrix of fixed (permanent)
entanglements, not the fraction in the actual blend. With this definition, Eq. (148) can be compatible with
the stress–optical rule (although a link between the time evolution of w 00i t and the chain motion in the
actual blend becomes less transparent). Mead et al. [166] further developed a double-diffusion model for
the probability density fij si ; sj ; t for the survival of the entanglement formed by the i-th and j-th chains
at respective curvi-linear positions si and sj. This model, valid under the conditions explained below,
reproduces Eq. (148) when the probability density has a factorized form, fij si ; sj ; t fi si ; tfj sj ; t: In
addition, the double-diffusion model can be extended to incorporate various dynamic modes (e.g.
contour length fluctuation) [166].
The double reptation model (Eq. (148)) assumes full relaxation of a given entanglement segment that
immediately occurs when one of the entanglement-forming chains diffuses away. Namely, the model
neglects the slow, large scale Rouse-like CR motion of the chain that is required for the full relaxation.
Thus the model is valid only when this large-scale CR motion is not important.
Considering these points, Milner specified a condition necessary for the double reptation model to be
(approximately) valid for binary blends of linear probe and matrix chains [151]: The model is valid when
the probe chains are well entangled among themselves and the matrix chains are highly entangled but are
sufficiently shorter than the probes. These conditions meet in the chain reptation II regime defined by
Viovy et al. [144] (Eq. 113) [151].
Concerning this point, we should emphasize that the double reptation model is never valid for dilute
probe chains entangled only with much shorter matrix chains: The model predicts full relaxation of these
probes at the matrix relaxation time, which contradicts to the experimental fact [68–71]. (Des Cloizeaux
1312
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
[146] claimed the validity of his model without comparing the model with the data for such dilute probes
[68–71].)
Despite the above limitation, the double reptation model is useful for describing the viscoelastic
behavior of polydisperse systems having a broad, unimodal molecular weight distribution
[149,150,185]. (The large-scale CR motion is not very important for G(t) of these systems.) Specifically,
the model with properly expressed m0i t can be utilized to evaluate the molecular weight polydispersity
from the viscoelastic data [149] (because of the high sensitivity of the relaxation time of m0i t to the
component molecular weight.)
3.7.3. Combination of CR with reptation
3.7.3.1. Models with independence assumption We consider a binary blend of linear probe and matrix
chains composed of N2 and N1 entanglement segments, respectively. These chains are allowed to relax
via reptation and CR. Independence of the reptation and CR processes is assumed in many models
[82,85,135,142,144]. Properties deduced from these models are summarized below.
Viscoelastic properties: Under the above assumption of independence, the relaxation modulus of the
blend is written in a form [82,85,135,142,144]
G t GN y1 m1 t 1 y 2 m2 t
149
with
i
mi t mi
rep tmCR t;
i 1; 2
150
Here, y i and m i(t) are the volume fraction and normalized relaxation modulus of the component i; i 1
i
and 2 for the matrix and probe. The m i(t) is expressed as a product of the moduli mi
rep t and mCR t for
i
the reptation and CR processes. This expression has been derived from a consideration that mi
rep and mCR
represent the tube survival probabilities for the pure reptation and CR processes and that the two
probabilities can be multiplied to give the net probability if the two processes are independently taking
place.
For examination of the meaning of this “independence”, we hereafter consider the simplest blend in
which the probe chains are dilute and entangled only with the matrix chains, i.e., y 2 N2 , 1: For this
case, m 1(t) is not affected by the dilute probes and coincides with the moduli of the matrix chains in their
monodisperse state.
For the probe, we neglect CLF in the reptation process and assume that the CR process proceeds via
the Rouse dynamics. Then, the normalized moduli for these processes are written as [135] (cf. Eqs. (42)
and (63))
m2
rep
t
X
podd
!
8
tp2
;
exp 2
trep
p 2 p2
m2
CR
N2
1 X
tp2
t
exp 2
N2 p1
tCR;G
!
151
Here, t rep and t CR,G are the reptation and viscoelastic CR times of the probe (cf. Eqs. (62) and (104)). As
seen from the factorized form of m 2(t) (Eq. (150)), the longest viscoelastic relaxation time of the dilute
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1313
probe is given by
"
#21
1
1
tG
1
trep
tCR;G
152
Dielectric properties: We consider the normalized dielectric relaxation function F 2(t) of the dilute
probe chains y 2 N2 , 1 in the blend. These chains have type-A dipoles without inversion. Under the
independence assumption, F 2(t) should be written in a factorized form [114,143]
2
F2 t F2
rep tFCR t
with
F2
rep
t
X
podd
!
8
tp2
;
exp 2
trep
p2 p2
153
F2
CR
t
X
podd
8
tp2
exp
2
tCR;e
p2 p2
!
154
2
Here, F2
rep t and FCR t are the normalized dielectric relaxation functions for the pure reptation and CR
processes, respectively (see Sections 3.2.3.2 and 3.5.1), and tCR;e is the dielectric CR time tCR;e
2tCR;G : From Eqs. (153) and (154), the longest dielectric relaxation time of the dilute probe is given by
"
#21
1
1
te
1
155
trep
tCR;e
Diffusion properties: Under the assumption of independent reptation and CR processes, the mean
square displacement of the dilute probe is given by a sum of the displacements due to respective
processes [135]. Then, the diffusion coefficient DG of the probe is written as [135]
DG Drep 1 DCR
156
The coefficients Drep and DCR for the reptation and CR processes are given by Eqs. (72) and (105),
respectively.
3.7.3.2. Configuration-independent CR (CICR) model For either reptation or Rouse-CR processes, the
viscoelastic m and dielectric F are calculated from more fundamental, structural quantities, the orientation function S(n,t) and local correlation function C(n,t;n 0 ); see Eqs. (40), (45), (61), and (68). Thus the
factorized m 2(t) and F 2(t) of the above independence model (Eqs. (150) and (153)) should be also
accompanied by S(n,t) and C(n,t;n 0 ) that are calculated from specific time evolution equations.
From this point of view, Watanabe and Tirrell [143] looked for the time evolution equations that
reproduce the factorized m 2(t) and F 2(t). It turned out that these equations should have simple forms
[75,114,143]
"
#
2S n; t
Dc 22
dln mCR t
G
G
157
1 kCR t S n; t
with kCR
t
2t
dt
a2 2n2
2C n; t; n 0
2t
"
#
Dc 22
e
1 kCR t C n; t; n 0
a2 2n2
e
with kCR
t
dln FCR t
dt
158
1314
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
Here, the differential terms represent the reptation of the probe (with the curvi-linear diffusion coefficient
G
e
tS n; t and kCR
tC n; t; n 0 correspond to the CR relaxation of the probe
Dc), and the product terms kCR
G
e
with the rate constants kCR t and kCR t: (The solutions of Eqs. (157) and (158), S n; t mCR tSrep n; t
and C n; t; n 0 FCR tCrep n; t; n 0 ; give the factorized m 2(t) and F 2(t).)
G
e
t and kCR
t and thus assume that the CR
Eqs. (157) and (158) include the n-independent kCR
relaxation always occurs uniformly along the probe contour irrespective of the probe configuration.
From this point, the models specified by Eqs. (157) and (158) are referred to as the configurationindependent CR (CICR) models [75].
G
e
and kCR
We can introduce n-dependence (and any additional operations with respect to n and t) in kCR
and still force Eqs. (157) and (158) to recover the pure reptation and CR relaxation functions in the limits
of kCR ! 0 (reptation dominance) and Dc ! 0 (CR dominance). However, for such cases, Eqs. (157) and
(158) do not reproduce the factorized m 2(t) and F 2(t) deduced under the assumption of the independent
reptation and CR processes. Thus, in the fundamental level of describing the chain motion for S and/or C,
this assumption should correspond to the assumption of CICR.
3.7.3.3. Configuration-dependent CR (CDCR) model As noted clearly for the Rouse dynamics (Section
G
e
and kCR
for the Rouse-CR relaxation depend on the chain configuration. Thus
3.1), the rate constants kCR
the factorized m 2(t) and F 2(t) derived under the assumption of CICR are just crude approximations.
Considering this point, Watanabe and Tirrell [143] made eigenmode analyses to formulate a model for
competition of the reptation and Rouse-CR processes. Features of their model, referred to as the
configuration dependent CR (CDCR) model, are summarized below.
Dielectric properties: The local correlation functions C(n,t;n 0 ) for the reptation and Rouse-CR
processes have the same eigenfunction fp0 n sin ppn=NP2 p 1; 2; …; as noted from the identical
expansion form for these processes, C n; t; n 0 2=N2 p fp0 nfp0 n 0 exp2tp2 =t (cf. Eqs. (45) and
(68)). This coincidence of fp0 n results in the same expansion form of C(n,t;n 0 ) also for the case of
competition of simultaneously occurring reptation and
Rouse-CR
For this case, the amplitude
RN2 0 processes.
2 RN2
0 0
of the p-th eigenmode is given by Ap t 2=N2 0 dn 0 dn C n; t; n fp nfp0 n 0 ; and the decay of
this Ap(t) is determined only by the reptation and Rouse-CR eigenmodes of the same order p [114,143].
(In other words, for C, the competition occurs only for these eigenmodes of the same order.) Thus, the
C(n,t;n 0 ) obtained from the CDCR model is simply written as [114,143]
"
#21
!
2 X 0
tp2
1
1
0
0 0
C n; t; n
with te
f nfp n exp 2
1
159
te
trep
tCR;e
N2 p$1 p
For the dilute, type-A probe chains
dipole inversion, the dielectric F 2(t) is calculated from this
R
P without
C(n,t;n 0 ) as (cf. Eq. (23) with n ! N0 2 …dn and q n 1 for n 0 2 N2 )
!
X
8
tp2
F2 t
exp 2
160
te
p 2 p2
podd
Note that the reptation and Rouse-CR processes are rigorously combined in the CDCR model to give
these F 2(t) and C(n,t;n 0 ).
The longest dielectric relaxation time t e deduced from the CDCR model (Eq. (159)) is identical to
that of the model assuming the independent reptation and CR processes (Eq. (155)). However, these two
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1315
models predict different dielectric mode distribution. The CDCR model predicts no matrix effect on this
distribution (Eq. (160)), while the independence model predicts changes in the distribution with the
matrix chain length (cf. Eqs. (153) and (154)). This difference is discussed in relation to the dielectric
data later in Section 5.3.
Diffusion properties: For the reptation and Rouse-CR processes, the mean-square displacement
d n; t2 of a given entanglement segment is expressed in the same expansion form (in long time scales
of our interest; see Eqs. (48) and (71)). Namely, the eigenfunction of d n; t2 is the same for these
processes. Thus, as similar to the situation for C(n,t;n 0 ), the competition of the reptation and Rouse-CR
processes does not change this form of d n; t2 and the time evolution of p-th eigenmode is determined
only by the reptation and Rouse-CR eigenmodes of the same order p.
From the above results, d n; t2 of the dilute probe deduced from the CDCR model is given by Eq.
(71) with t rep being replaced by t e (Eq. (159)) and DG is obtained as Drep 1 DCR : This DG coincides
with that obtained from the independence model (Eq. (156)). (Watanabe and Tirrell [143] deduced this
coincidence from a simpler argument for the Gaussian conformation of the probe.)
Viscoelastic properties: For the reptation and Rouse-CR processes, the orientation function S(n,t) has
CR
different eigenfunctions, Frep
p n sin ppn=N2 and Fpq n sin ppn=N2 sin qpn=N2 : Thus, for the
dilute probe relaxing via both processes, all reptation eigenmodes compete with a given Rouse-CR
eigenmode and vice versa. For this case, the reptation and Rouse-CR eigenmodes are mixed to give a
new set of eigenvalues u q and eigenfunctions Fq n for S(n,t). This situation is quite different from those
for C(n,t;n 0 ) and d n; t2 :
Watanabe and Tirrell [143] analyzed decay of amplitudes of combined Rouse-CR and reptation
eigenmodes under an approximation of utilizing only a diagonal subset of the eigenfunctions FCR
pp
for the former. This approximation enabled analytic evaluation of a new set of eigenvalues u p and
eigenfunctions Fp n for S(n,t) [143]. For N2 q 1; the results of Watanabe and Tirrell [143] can be
compactly summarized in the following form.
From the reptation and CR times of the probe, t rep(N2) and t CR,G(N2;N1) with N1 number of entanglement segments per matrix chain (cf. Eqs. (62) and (104)), the eigenvalues and eigenfunctions are
determined as
up 2n 2 N2
2tCR;G N2 ; N1
2 cos up
up ;
Fp n cos
161
tan up 2
N2 trep N2
N2
In terms of these u p and Fp n; S n; t of the probe subjected to a small step shear strain is written as
!
N2
X
t
S n; t S0
162
Bp Fp n exp 2
tp
p1
Here, S0 ( 4g /15; cf. Eq. (60)) is an n-independent initial value of S, Bp is a numerical coefficient for
the p-th eigenmode determined from this initial condition, and t p is the p-th relaxation time given by
"
#21
p2
4
1
tp 2
163
1
tCR;G N2 ; N1
up trep N2
From this S(n,t), the normalized relaxation modulus of the probe is obtained as [75,143] (cf. Eq. (13)
1316
with
P
!
n
m2 t
RN2
N2
X
0
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
…dn)
B 0p exp
p1
t
2
tp
!
where B 0p is a numerical coefficient defined by
"
#21
N2 trep N2
cp
4tCR;G N2 ; N1 2
0
Bp N
with cp 2 1
up
1
tCR;G N2 ; N1
N2 trep N2
X2
cr
164
165
r1
As can be noted from Eq. (161), the eigenvalue u p gradually changes from the Rouse-CR value up
pp; p 1; 2; … to the reptation value up p 2 1=2p; p 1; 2; … with an increase of the factor
t CR,G/N2t rep. Correspondingly, S(n,t) and m 2(t) exhibit gradual changes from the Rouse-CR limit to the
reptation limit. It should be noted that m 2(t) of the CDCR model does not have a factorized form.
The CDCR models for C(n,t;n 0 ) and d n; t2 (for F 2(t) and DG) were rigorously formulated to
account for competition of all reptation and Rouse-CR eigenmodes. In contrast, the above CDCR
model for S(n,t) was formulated under the approximation of combining only the diagonal Rouse-CR
eigenmodes with the reptation eigenmodes. The m 2(t) obtained under this approximation (Eq. (164))
underestimates the fast relaxation due to higher-order Rouse-CR eigenmodes compared to m 2(t)
obtained from rigorous combination of all Rouse-CR and reptation eigenmodes [143]. This point is
further explained in relation to viscoelastic data of blends later in Section 4.4.
3.8. Chain stretch and convective constraint release models
Under large strains/fast flow, the conformation and motion of the chain are significantly different from
those at equilibrium. This difference results in nonlinear viscoelastic properties of entangled polymers.
Attempts have been made to explain these properties under the tube concept, and several models have
been proposed [161–165]: key ideas in these models are (1) relaxation of the chain stretch faster than the
orientational relaxation and (2) release of constraints for a given chain due to flow/strain-induced motion
of surrounding chains. This section briefly summarizes features of these models.
3.8.1. Chain stretch models
For entangled linear chains, Pearson et al. [161] separately considered the time evolution of an
average orientation tensor S t and a chain stretch ratio l (t). These quantities are defined by
1 ZL t
1
L t
S t
ku~ s; tu~ s; tl ds 2 I;
l t
166
L t 0
3
Leq
Here, L(t) is the chain contour length at the time t, u~ s; t is the unit tangential vector of the chain at the
curvi-linear coordinate s, and I is the unit tensor. (S corresponds to an average of S 0 (Eq. 5).)
Pearson et al. [161] described the time evolution of S t by the DE equation with IAA (Eq. (82))
S t
Zt
2∞
dt 0
2mrep t 2 t 0 IAA
Q
Et;t 0
2t 0
167
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1317
Here, Q IAA is the DE tensor with IAA (Eq. (81)). On the other hand, the time evolution of l (t) was
determined by [161]
dl
1
l 2 1
lK : S 2
dt
teq
168
where K is the strain-rate tensor. The first and second terms on the rhs of Eq. (168) indicate the rate of
stretching due to this K and the rate of shrinkage (relaxation of stretching) due to the longitudinal Rouse
motion along the tube with the characteristic time t eq ( ù t R,e ; Eq. (46)).
Pearson et al. [161] expressed the anisotropic part of the stress tensor s(t) as (cf. Eq. (6))
s t 5GN l t2 S t
169
This expression reduces to the DE expression (Eq. (82)) if the chain is not stretched l 1:
The constitutive equation of the model of Pearson et al. [161] is given by a set of Eqs. (167)–(169) that
can be solved numerically for arbitrary strain. Specifically, after start-up of shear flow, the model
predicts that the first normal stress difference N1 sxx 2 syy exhibits a overshoot when the
shear rate g_ exceeds a relaxation rate of the chain stretching, teq 21 : This feature, not deduced from
the DE equation (Eq. (82)), demonstrates an importance of the chain stretching for the nonlinearities of
N1. (For the shear stress, s sxy ; the overshoot is observed at g_ . trep 21 ; i.e. when the orientational relaxation is slower than the flow.)
The above model is formulated for S t and l (t), meaning that the model (implicitly) assumes uniform
stretching of the chain along its contour. This assumption was removed later by Pearson et al. [162] by
formulating the model for the local orientation tensor S~ s; t ku~ s; tu~ s; tl (equivalent to S 0 defined by
Eq. (5)) and the local stretch ratio l~ s; t; the latter being defined as a derivative of the coordinate s with
respect to the monomer index.
In this refined model [162], the time evolution of S~ s; t is determined by Eq. (167) with Q IAA and m rep
being replaced by the DE tensor Q without IAA (cf. Eq. (77)) and the tube survival density under flow G,
respectively. The time evolution of l~ s; t is determined from longitudinal Rouse motion under flow. G
is in turn determined by the reptative diffusion of the chain and the convection, and the velocity of the
tube at a given coordinate s is evaluated from S~ s 0 ; t s 0 , s and the strain-rate tensor K. Integrodifferential equations describing these situations are solved to obtain S~ s; t and l~ s; t; and the stress
tensor s(t) is calculated as an integral of the product l~ s; tS~ s; t throughout the stretched chain contour.
After start-up of shear flow at a rate g_ ; N1 and s calculated from the above refined model exhibit
respective overshoot peaks. The model predicts that the strain at the peak, gpeak g_ tpeak tpeak
peak time changes with g_ : In the low-g_ and high-g_ asymptotes, the predicted g peak are summarized
as [162]
For s:
gpeak 2:3 low g_ ;
_ eq =2 high g_
gpeak gt
170
_ eq high g_
gpeak gt
171
For N1:
gpeak 4:6 low g_ ;
1318
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
Thus, the overshoot peak emerges at a constant strain at low g_ and at a constant time (t eq /2 or t eq) at high
g_ : (Qualitatively the same results were obtained also from the simpler model for S [161].)
3.8.2. Convective constraint release (CCR) models
3.8.2.1. Ianniruberto–Marrucci model Marrucci [163] focused the flow/strain-induced constraint
release (not due to the thermal motion) and demonstrated that this type of constraint release can result
in the experimentally observed Cox–Merz rule h g_ ù uhp vuvg_ :
For the average orientation tensor S t of linear chains, Ianniruberto and Marrucci [164] formulated a
tube model that incorporates this strain/flow-induced constraint release, referred to as the convective
constraint release (CCR). The CCR can be easily visualized in Fig. 5. Once a chain is stretched by the
large step strain, it retracts along its tube thereby abandoning some entanglement points. This activates
the CCR motion of other chains that were constrained by these points before this retraction. Essentially
the same situation occurs also under fast flow.
When a chain shrinks in its tube under the velocity field specified by the strain-rate tensor K, the chain
(L chain contour length) [164]. This inward
ends move inward with an average velocity LK : S=2
motion enhances the escape of the other chain (probe) from the tube formed by the shrinking chain.
Ianniruberto and Marrucci [164] considered that the probe relaxation frequency increases, due to this
enhancement, by a factor proportional to the inward velocity. The corresponding expression of the
terminal relaxation time t of the probe is [164]
1
1
1 bK : S
t
trep
172
Here, t rep is the reptation time of the probe under absence of CCR, and b is a numerical coefficient.
Furthermore, Ianniruberto and Marrucci [164] considered that the time evolution of S t under
presence of CCR is described by Eq. (167) with t rep included therein (in the m rep term) being replaced
by t (Eq. (172)). Retaining only the slowest mode in m rep, they obtained
!
0
Zt
1
t
2
t
0
QIAA Et;t 0
dt exp 2
173
S t
t 2∞
t
Eqs. (172) and (173) are combined to obtain a consistent set of t and S t for a given K, and the stress
is calculated from the DE expression, s t 5GN S t (cf. Eq. (82)). In this way, Ianniruberto and
Marrucci [164] calculated the shear stress s under steady shear flow and found that s never decreases
with increasing g_ if the coefficient b (Eq. (172)) is larger than a critical value, bc 2:76: This result
demonstrates that the CCR can remove the flaw of the DE constitutive equation, a decrease of s with
increasing g_ (cf. Eq. (84)).
3.8.2.2. Mead–Larson–Doi model The model of Pearson et al. [161] (Eqs. (167)–(169)) successfully
predicts the overshoot of s and N1 in the transient state but has the same problem as the DE equation,
the decrease of steady s with increasing g_ : This problem emerges because S of their model has a very
small xy component (i.e. the chain is perfectly orientated in the sliding plane) and the stretch ratio l does
not have a large value in the steady state at large g_ : Considering this point, Mead, Larson, and Doi
(MLD) [165] incorporated the CCR mechanism in the model of Pearson et al. [161]. With this
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1319
mechanism, the tube constraining the chain is re-orientated in the y (shear gradient) direction even under
xy and l values.
fast steady shear and allows the chain to have fairly large S
In the MLD model, CCR induces not only this reorientation but also dilation of the tube (in a sense
similar to that explained in Section 3.6). This dilation affects the time evolution of l (t) ( / L 0 (t); length
of the dilated tube). Since L 0 (t) is proportional to N 0 t1=2 with N 0 (t) being the number of dilated tube
segments per chain (cf. Eq. (119) with a 1), the model considered the change of l (t) due to CCR to be
described by [165]
1 dl t
d
d
1 d
1
ln l t
ln L 0 t
ln N 0 t 2 kCCR
174
dt
2 dt
2
l t dt CCR dt
Here, kCCR is a rate constant for the change of N 0 (t) due to CCR; dN 0 t=dt 2kCCR N 0 t: Since l $ 1;
dl=dt should vanish at l 1: Considering this point, Mead, Larson, and Doi interpreted the result of Eq.
(174) as [165]
dl t
1
2 kCCR l t 2 1
175
dt CCR
2
The other effect of CCR, the reorientation of the tube, was formulated for a fraction P(t,t 0 ) of the tube
segments that were orientated at a past time t 0 and still survive at the present time t. Fundamentally, the
time evolution of this P(t,t 0 ) is considered to be determined by the CCR rate constant, i.e. 2P=2t
2kCCR P: An additional factor was considered in the MLD model. In the vicinity of l 1; dl=dt has only
small values (cf. Eq. (175)) and thus the main CCR effect is the tube reorientation. On the other hand, for
l q 1; this effect is switched to the decrease of L 0 (t) and the reorientation hardly occurs. Considering
this feature, Mead, Larson, and Doi expressed the time evolution of P(t,t 0 ) due to CCR as [165]
"
#
2P t; t 0
2f lkCCR P t; t 0
176
2t
CCR
Here, f(l ) is a switching function that represents the above change in the frequency of the tube
reorientation; f(l ) ù 1 for l ù 1 and f(l ) ! 0 for l q 1:
relative to the
The CCR rate constant is given as a rate of convection of the entanglement mesh, K : S;
elongational rate of the chain, d[ln l ]/dt. Thus the MLD model utilizes [165]
1 dl t
kCCR K : S 2
l t dt
177
This kCCR vanishes when the chain deforms affinely with the applied strain (i.e. no retraction), as required
from the CCR molecular picture.
From the above results, the constitutive relationship of the MLD model is specified in the following
way. Since the model considers the CCR effect on the surviving fraction of the orientated tube segments
(Eq. (176)), the relationship between the average orientation tensor S and the DE tensor Q IAA is
described by a modified version of Eq. (167) as
S t
Zt
2P t; t 0 IAA
dt
Q
Et;t 0
2t 0
2∞
0
178
(If the above effect is absent, P(t,t 0 ) reduces to mrep t 2 t 0 and Eq. (167) is recovered.) The time
1320
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
evolution equation of l is obtained by adding the CCR contribution (Eq. (175) with Eq. (177)) to the
dl /dt derived in the model by Pearson et al. (Eq. (168)). The result is
dl
1
1
1 dl
l 2 1 2
179
l 2 1
K:S2
lK : S 2
2
dt
teq
l dt
Finally, the time evolution of P(t,t 0 ) is described by adding the CCR contribution (Eq. (176) with Eq.
(177)) to the reptation contribution 2P=2t 0 rep 2P={l2 trep } (due only to the slowest mode)
2P t; t 0
1
0
2 1 dl P t; t 0
2
P
t;
t
2
f
l
K
:
S
180
l dt
2t 0
trep l2
In the above 2P=2t 0 rep term, the factor l 2 is included to account for an increase of the reptation time due
to the tube elongation. (This additional factor was introduced mainly for making a consistent link with a
more elaborated model formulated for the local orientation tensor [165].)
The constitutive equation of the MLD model is given by a set of Eqs. (178)–(180) and Eq. (169) (the
stress expression). These equations were solved numerically for various types of strain, e.g. step strain
and transient/steady flow. Mead, Larson, Doi examined two switching functions, f l exp2 l 2 1
and f l 1=l; the former being introduced in an ad hoc way and the latter, obtained from a selfconsistency argument for P(t,t 0 ). It turned out that the two functions gave nearly the same s [165]. The
features of the MLD model thus found are summarized below.
(1) Steady shear flow: At g_ , trep 21 ; the steady shear stress s and first normal stress difference N1
increase in proportion to g_ and g_ 2 ; respectively. This behavior is dominated by reptation.
At intermediate g_ between trep 21 and teq 21 ; both s and N1 become less dependent on g_ :
Specifically, g_ -independent stresses (s 0:615GN and N1 3:35GN ) are observed when teq 21 is
much larger than trep 21 (i.e. when the chain is very long). This behavior is due to CCR: At those g_ ;
reptation becomes less important and the chain is not stretched significantly.
At high g_ . teq 21 ; s and N1 again increase with g_ : This behavior results from the chain stretching.
In the examined range of g_ ; N1 continuously increases while s finally decreases after exhibiting a peak
[165]. (This decrease of s is related to inefficiency of CCR at such high g_ :)
Corresponding to the above results, plots of shear viscosity h g_ s=g_ against g_ for chains of
different lengths are (almost) collapsed in a master curve at intermediate g_ : This behavior can be
summarized as
h g_ ù 0:615GN g_ 21 at g_ . trep 21 irrespective of the chain length
181
(2) Transient shear flow: After start up of flow at g_ . teq 21 ; both s and N1 exhibit the overshoot
peak. This result reflects a transient maximum in the chain stretching, as also noted in the model of
Pearson et al. [161].
After cessation of fast flow at g_ . teq 21 s exhibits two-step decay with time. At t , teq ; the decay
rate of s is roughly proportional to g_ (due to the chain shrinkage and accompanying CCR effects). At
t . teq ; the decay rate coincides with the usual reptation rate, [t rep] 21.
(3) Step shear strain: After imposition of large step strains g , s exhibits nonlinear damping at times
.teq. The terminal relaxation rate coincides with [t rep] 21, and the time–strain separability holds for the
nonlinear relaxation modulus G(t,g ) at t well above t eq. The corresponding damping function, hMLD(g ),
is somewhat smaller than the hDE(g ) obtained from the DE model without IAA (Eq. (79)), but the
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1321
difference is not very large (cf. Fig. 62 shown later): in the entire range of g , 1 $ hMLD g=hDE g .
0:55 (for the switching function f l exp2 l 2 1:
(4) Steady elongational flow: Under elongational flow, the direction of the chain orientation does not
change with the Henckey strain rate 1_ : Thus the CCR has just a qualitative effect on the steady
elongational viscosity h E, and the prediction of the MLD model is quite similar to that of the model
by Pearson et al. [161,162] (without CCR): h E is independent of 1_ at low 1_ , trep 21 ; h E decreases in
proportion to 1_ 21 hE 3:04GN 1_ 21 at intermediate 1_ well above trep 21 but well below teq 21 ; and
h E increases with 1_ at 1_ . teq 21 and finally diverges at 1_ 2teq 21 : The increase of h E at high 1_
results from the chain elongation, and the divergence is due to the infinite extensibility assumed in the
model. (In fact, even the simple Rouse chain exhibits this divergence [176].)
Mead, Larson, and Doi [165] also formulated their CCR model for the local orientation tensor S~ s; t
(by incorporating the CCR idea in the refined model of Pearson et al. [162]). This refined MLD model
includes the tube survival density under flow, G, and the time evolution of this G is determined by the
reptative diffusion, convection, and CCR. An additional factor, the contour length fluctuation modeled in
the way of Ball and McLeish [153] (Section 3.6.2), is readily included in this time evolution. Mead,
Larson, and Doi actually solved the constitutive equation for this case and found good agreement of the
calculated s and N1 with the data in the steady state (cf. Fig. 66 shown later).
Finally, a brief comment needs to be added for the MLD model (for either the average S t (Eqs.
(178)–(180)) or the local S~ s; t). The CCR considered in the model leads to the tube reorientation and
dilation, the latter results in the shortening of the tube. The tube dilation picture is valid when the chain
can equilibrate itself in the dilated tube (Section 3.6). Thus, the MLD model is valid for systems in which
this equilibration is rapidly completed, or, the large scale equilibration is safely neglected [165] (in the
sense explained for the double reptation model; Section 3.7.2).
For the thermal CR in the linear regime, we can consider that the equilibration in the dilated tube
occurs via the Rouse-like CR motion, and a time necessary for this equilibration is well specified
(Sections 3.5 and 3.6). In contrast, for the CCR in the nonlinear regime, it is not certain whether the
equilibration occurs via the Rouse-like motion or not, and the time necessary for this equilibration is not
specified yet. Theoretical studies are necessary for this equilibration time that specifies the time scale
where the molecular picture of CCR-induced tube dilation is valid.
3.9. Pom–pom models
Recently, an increasing research interest is placed on a particular class of branched polymers that have
linear backbones with multiple grafts, e.g. combs and pom–poms (the latter having multiple arms at the
backbone ends; cf. Fig. 13). These branched polymers have important applications in industrial processing. However, their nonlinear viscoelastic behavior (encountered in the processing) was not clearly
explained from molecular terms, probably due to a difficulty in describing the effects of the motion of the
grafted arms on the nonlinear relaxation of the backbone.
McLeish [158] made a breakthrough for this situation. For the simplest pom–pom, H-shaped polymer,
he utilized the tube concept to explain the importance of a tension balance between the backbone and all
arms attached thereto. This property is most clearly noted for the stress relaxation under step strains. In
long time scales where the arms are not stretched, the backbone has a critical stretch ratio l c ( 2 in the
case of the H polymer): If the backbone is initially stretched above l c (Fig. 13b), it shrinks to withdraw a
portion of the arms into its tube (Fig. 13c).
1322
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
Fig. 13. Schematic illustration of a pom–pom chain having q arms at each end of the backbone. If this pom–pom at equilibrium
is subjected to a strain E and stretched by a factor l . q; the backbone (thick curve) shrinks to withdraw the arms (thin curves)
in its tube.
Following this idea, Bick and McLeish [159] calculated the damping function for branched polymers
of various topologies. McLeish and Larson [160] developed a constitutive model for pom–poms that
incorporates many of the concepts developed in the generalized tube models (Sections 3.2–3.8). The
McLeish–Larson (ML) model suggests interesting differences in flow properties of the pom–poms and
linear chains, that could have an important feed back to actual polymer processing. Considering this
importance, this section summarizes features of the ML model.
3.9.1. McLeish–Larson model [160]
In the original paper of McLeish and Larson [160], the pom–pom arm dynamics is described in terms
of a reduced curvi-linear coordinate. Here, we utilize the non-reduced coordinate s (measured from the
branching point) for convenience of a direct comparison with the models for the star arms (Sections 3.3
and 3.6.2).
We consider a monodisperse system of pom–pom having q arms at each ends (cf. Fig. 13 for the case
of q 3). Each arm is composed of Name monomers, and the backbone has Nbme monomers. The
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1323
backbone volume fraction is y b Nb = 2qNa 1 Nb : The arm and backbone are constrained in a tube of
diameter a and have equilibrium contour lengths La aNa and Lb aNb ; respectively.
The pom–pom backbone have the critical stretch ratio, lc q; at which its tension is in balance with
the tensile force from all non-stretched arms, fall qFeq , qkB T=a (cf. Eq. (51)) [158,160]. The backbone with l . lc withdraws a portion of arms into its tube (Fig. 13c), and this portion is not stretched
but orientated according to the configuration of this tube. Thus the stress in long time scales is sustained
not only by the backbone but also by the sucked-in portion of the arms. Consequently, in the ML model
[160], the stress relaxes via several steps: (1) relaxation of the arm orientation, (2) the backbone
shrinkage that re-orients the sucked-in portion of the arms, and (3) orientation relaxation of this portion
and the backbone as a whole. The characteristic times for these steps and the corresponding chain
dynamics are summarized below.
3.9.1.1. Characteristic times Arm retraction: Assuming that the backbone ends are fixed during the
arm relaxation process, the ML model [160] combined the arm retraction and tube dilation in the Ball–
McLeish form (Section 3.6.2.1) to express the time required for the arm end to retract by a curvi-linear
distance z as
"
!#
15
La 2 s2
2 La 2 s3
p
N
with s La 2 z
ta s t a exp
2 1 2 y b
182
8 a
L2a
3L2a
Here, t p(a) is the Rouse equilibration time of the entanglement segment (Eq. (56)), and s is the
remaining distance from the branching point. If the arm is not sucked in the tube for the backbone,
its longest relaxation time is given by t a(0).
The tube dilation for the arm occurs only via the relaxation of the arms having the volume fraction
1 2 y b : This fact is considered in Eq. (182) as the prefactor for the cubic term (the dilation term). Except
this point, t a given by Eq. (182) is identical to t of the Ball–McLeish model (Eq. (135)).
Backbone shrinkage: As similar to the diffusion of star chains (Section 3.3.4), the backbone ends
(branching points) can move by a distance a once the arms relax. This end motion allows the backbone to
shrink. Thus the arm relaxation determines the rate of the backbone shrinkage.
Considering this point, McLeish and Larson [160] modeled the shrinkage process as a motion of a
dumbbell composed of two beads connected by a Gaussian spring of a strength k , kB T=Nb a2 (the
backbone elasticity). Assuming that the bead (backbone end) diffuses over a distance a at a time qt a(0)
and thus has the one-dimensional diffusivity D 0 a2 =2qta 0; they evaluated the bead friction coefficient
from the Einstein relationship, z 0 kB T=D 0 2qkB T ta 0=a2 :
The intrinsic friction of the backbone, z 0Nbme, is negligibly small compared to this z 0 . Thus, from the
above dumbbell model, the characteristic time for the backbone shrinkage is obtained as [160]
ts z 0 =2k qta 0Nb
183
Whenever l . q; the backbone shrinks with this t s. In time scales .t s, each arm is sucked in the tube
for the backbone by a curvi-linear length sc (measured along the tube with the diameter a; cf. Fig. 13c).
Orientational relaxation of backbone: In time scales .t s (.t a(0)) where the orientational relaxation
of the backbone occurs, the arms work as a solvent to dynamically dilate the tube for the backbone. This
and length L 0 aNb y1=2
dilated tube has a diameter a 0 ay21=2
b
b :
1324
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
The backbone is assumed to be sufficiently long and relax via reptation in the dilated tube. The arms
determine the friction for this reptation process, as they did in the backbone shrinkage process. However,
during the reptation process, each arm has been sucked in by the length sc. Thus the arm allows the
backbone reptation when it retracts only by the distance La 2 sc (cf. Fig. 13c). This partial retraction
occurs in the tube for respective arms (not in the dilated tube considered at t . ta 0: Thus the time
required for the partial retraction is given by t a(sc) (Eq. (182)). The corresponding friction coefficient
due to each q arms (at the backbone end) is estimated again from the Einstein relationship as z 00
2qkB T ta sc =a2 [160].
The total friction for the backbone, due to the 2q arms, is given by 2z 00 . Thus the reptation time for the
backbone in the dilated tube is given by [160]
tb sc
2z 00 L 0 2
4
2 ta sc y b qNb2
kB T p2
p
184
This t b decreases with increasing sc (cf. Eq. (182)). However, t b can remain longer than t a(0) because of
the factor qNb2 in Eq. (184). This result means that the backbone has plenty of time to equilibrate itself in
the dilated tube, ensuring the validity of the tube dilation picture (cf. Section 3.6). The wide separation of
t b and t a(0) also indicates that the backbone exhibits interesting nonlinear behavior in a wide range of
strain rates between tb 21 and ta 021 :
3.9.1.2. Stress expression McLeish and Larson [160] expressed the stress tensor s(t) in terms of the
average orientation tensor S t (cf. Eq. (166)) and the stretch ratio l (t). They limit themselves in long
time scales .t a(0) where the stress is sustained by the backbone and the sucked-in portion of the
arms. In this time scale, the tube for the backbone is dynamically dilated and the effective plateau
modulus is given by GNy b2. Thus s(t) is written in terms of S t and l (t), both defined for the
backbone, as [160]
s t
15
s t GN y 2b l t2 1 2q c
S t
4
Lb
185
Eq. (185) is equivalent to the stress expression in the chain stretch model (Eq. (169)), except for the
following points: (1) The prefactor “15/4” is utilized in Eq. (185) because the ML model [160] does not
utilize IAA. (IAA gave the factor “5” in Eq. (169)). (2) The effective plateau modulus GNy b2 (for the
dilated tube) is utilized in Eq. (185) instead of GN in Eq. (169). (3) The contribution of the sucked-in
arms is accounted in Eq. (185) through the term 2qsc/Lb.
An explanation is needed for this arm contribution. The sucked-in portion of the arm is not stretched
but has the orientation identical to that of the backbone. Thus, in the stress expression, the sucked-in
portion of the 2q arms can be regarded as an extra part of the backbone having the length 2qsc (sc from
each arm). Since this extra part is not stretched, its contribution to the stress is given by sa × {2qsc =Lb };
where sa 15=4GN y 2b S is the stress that the real backbone alone would exhibit when it were not
stretched and had the equilibrium length Lb (cf. Eq. (185) with l 1 and {2qsc =Lb } 0: Adding
this extra contribution to the stress 15=4GN y 2b l2 S sustained by the stretched backbone, we obtain
Eq. (185).
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1325
3.9.1.3. Chain dynamics As noted from Eq. (185), s(t) is determined by three time-dependent
quantities, S t; l t and sc(t). McLeish and Larson utilized the following time evolution equations
for these quantities to calculate s(t).
Average orientation tensor: For the pom–pom backbone subjected to strain/flow, McLeish and
Larson described the time evolution of S t as
!
0
00
Zt
Zt
2P
t;
t
dt
0
0
dt
Q Et;t 0
with P t; t exp 2
186
S t
00
2t 0
2∞
t 0 tb sc t
Here, Q(Et;t 0 ) is the DE universal tensor without IAA (Eq. (77)), and P(t,t 0 ) represents the survival
probability of the orientated tube segments. In Eq. (186), only the slowest reptation mode of the backbone (with the relaxation time t b given by Eq. (184)) is accounted, and the effect of the arm withdrawal
is considered through the sucked-in length sc. Except these points, Eq. (186) is equivalent to Eq. (167) of
the chain stretch model.
Backbone stretch ratio: Considering a balance of the backbone stretch and shrinkage, the former due
to convection, McLeish and Larson described the time evolution of l (t) as
dl
1
l 2 1
lK : S 2
dt
ts
for l , q
187
Here, K is the strain-rate tensor (determining the stretching rate), and t s is the shrinkage time affected by
the arms (Eq. (183)). Eq. (187) holds for l , q; i.e. when the backbone tension is smaller than the total
tensile force from all arms, fall , qkB T=a: Except these effects of the arms on l , Eq. (187) is equivalent
to Eq. (168) of the chain stretch model.
Sucked-in length: The time evolution of the sucked-in length, sc(t), is determined by a balance of
the total tensile force from all arms and the frictional force due to the portion of the arms not
sucked in the tube for the backbone [160]. (No equivalent process is included in the chain stretch
model.)
In time scales .t s, the backbone has the length qLb l q and its tension is balanced with fall. The
tube confining this backbone and the sucked-in portion of the arms (at both ends of the backbone) has
the length Lt qLb 1 2sc (cf. Fig. 13c). We now focus an arm segment located at the edge of this tube,
i.e., at the curvi-linear distance sc from the branching point, and consider its relative motion against the
tube that is being stretched due to convection. Assuming that the midpoint of the tube is at rest, we may
evaluate the velocity of this motion as V Lt =2K : S 2 dsc =dt; where the first and second terms
represent the tube velocity due to convection and the velocity of the focused segment, respectively
[160].
The friction for the above relative motion is determined by the portion of the arms not sucked in the
tube. Thus, the corresponding friction coefficient, related to the time for the arm retraction over the
distance La 2 sc ; is written as z 00 2qkB T ta sc =a2 : (This z 00 is identical to the coefficient utilized in the
derivation of t b; cf. Eq. (184).) Equating the frictional force, Vz 00 , to the total tensile force from all arms,
fall , qkB T=a; we find [160]
dsc
qLb
a
1 sc K : S 2
for l q
188
2ta sc
dt
2
1326
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
Fig. 14. Steady state shear and elongational viscosities of pom–pom calculated from the McLeish–Larson model (solid curves).
The dashed curves indicate predictions of the BKZ model that fits the G(t,g ) calculated from the McLeish–Larson model.
Reprinted with permission from J Rheol 1998;42:81–110 [160].
3.9.1.4. Model prediction The constitutive relationship of the ML model is specified by a set of Eqs.
(185)–(188) together with the expressions for the characteristic times (Eqs. (182)–(184)). These equations can be solved simultaneously (with numerical methods) to calculate the stress of the pom–pom
under strain of arbitrary history (at strain rates , ta 021 ).
As an example, Fig. 14 shows dependence of the calculated, steady shear and elongational viscosities,
h g_ and hE e_ ; on the strain rates (g_ and/or e_ ) [160]. The model predicts continuous shear-thinning for
h g_ and the strain-hardening (followed by softening) for hE e_ : The hardening results from the backbone stretch. The stretch does not exceed lc q in the steady state, meaning that the backbone has a
finite extensibility (because of the tension balance with the arms). Reflecting this finite extensibility,
hE e_ does not diverge but exhibits the softening at large e_ :
Apart from these interesting features of h g_ and hE e_ ; Fig. 14 demonstrates a difference
between the ML model and the BKZ model: McLeish and Larson [160] fitted the nonlinear
relaxation modulus G(t,g ) calculated from Eqs. (185)–(188) (not shown here) with the BKZ
equation [176] to determine the BKZ parameters. The dashed curves indicate the shear and
elongational viscosities h BKZ and h E,BKZ calculated from the BKZ equation with those parameters.
h BKZ is reasonably close to h of the ML model at low g_ but h E,BKZ exhibits significant deviation.
This result demonstrates that the pom–pom constitutive equation derived from the ML model is
not classified as the BKZ model (as can be directly noted also from the functional form of Eqs.
(185)–(188), the coupled integro-differential equations) [160]. This point is further discussed later in
Section 6.3.
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1327
4. Linear viscoelastic and diffusion behavior
4.1. Monodisperse linear chains
4.1.1. Viscoelastic behavior
Extensive experiments [1,2] have been conducted for entangled linear chains with narrow molecular
weight distribution (Mw =Mn , 1:1; hereafter referred to as monodisperse) in concentrated systems with
the polymer volume fraction y $ 0:3 (including bulk systems). These experiments revealed that the
qualitative viscoelastic features (e.g. the molecular weight dependence of relaxation time) are quite
insensitive to y and to the chemical structure of polymers. For the entanglement plateau modulus GN, the
zero-shear viscosity h 0, and the steady-state recoverable compliance Je, the results of those experiments
can be summarized as [1,2]
GN
nkB TM
/ y11a M 0
Me
h0 / z 0 y
Je
189
M 3:5^0:2
/ z0 y11 2:5^0:2a M 3:5^0:2
Me 2:5^0:2
2:5 ^ 0:5
/ y2 11a M 0
GN
for M . M 0c
for M . Mc
190
191
Here, M and n are the molecular weight and number density of the chain, and the exponent a is in a
range between 1 and 1.3. Me is the molecular weight between entanglements. The critical molecular
weights, above which Eqs. (190) and (191) hold, are Mc ù 2 2 3Me and M 0c ù 5 2 8Me ; respectively [1,2]. For short, non-entangled chains with M , Mc ; Rouse-like viscoelastic behavior is observed
(cf. Section 3.1).
Me is not directly measured but calculated from the GN data through a relationship deduced from a
particular model. Eq. (189) is obtained from the rubber elasticity model [1,2]. (The prefactor “4/5” is
multiplied to the rhs of Eq. (189) if the Doi–Edwards model is used; cf. Eq. (63)). However, the y
dependence of Me does not change with our choice of the model: Me in concentrated solutions is related
to Me0 of bulk systems as
Me y2a Me0
a 1 2 1:3
192
(This relationship, re-written for the tube diameter a, is utilized in the tube dilation models.) Fetters et al.
[186] showed that the Me0 value is related to the packing length (that represents a ratio of the net volume
of a chain to the mean-square end-to-end distance).
The Doi–Edwards model (Section 3.2) captures qualitative features of the experimental facts
summarized by Eqs. (189)–(191), but quantitative agreements are not obtained: For h 0, the model
predicts weaker M dependence (h0 / M 3 ; Eq. (65)) and larger magnitudes compared to the data.
The same discrepancy is noted also for the relaxation time ktG lw Je h0 : The predicted terminal
viscoelastic mode distribution, specified by the product Je GN 6=5 (Eq. (65)), is much narrower than
the observed mode distribution.
This difference in the mode distribution is most clearly examined for the storage and loss moduli,
1328
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
Fig. 15. Storage and loss moduli G 0 and G 00 of bulk, monodisperse linear PS at 1808C [187]. The numbers indicate 10 23M. The
solid curves for the three high-M samples indicate the prediction of the Milner–McLeish model. Reprinted with permission
from Phys Rev Lett 1998;81:725. q 1998 American Physical Society [152]; and from Rheol Acta 1985;24:220. q SpringerVerlag, GmbH & Co. KG [187].
G 0 (v ) and G 00 (v ) (v angular frequency). As an example, Fig. 15 shows the G 0 and G 00 data for bulk,
monodisperse polystyrenes (PS) at 1808C obtained by Schausberger et al. [187]. The numbers indicate
1023 M: The v dependence of G 0 and G 00 at low v is very similar for the three high-M samples in the well
entangled state (M . 5Mc ; with Mc ù 32 × 103 for bulk PS). Specifically, G 00 is proportional to v 2b
with b ù 1=4 at v . vpeak : This b value, characterizing the terminal mode distribution, is significantly
smaller than that deduced from the DE model (b 1=2; cf. Eq. (64)). (The observed mode distribution is
reported to be well described by an empirical relaxation spectrum of Baumgaertel et al. [188,189],
HBSW t hf t2nf 1 hs tns t , t1 with nf ù 2=3 and ns ù 1=4 for the local and global relaxation,
respectively.)
Because of the above discrepancies between the data and DE predictions, the tube model for linear
chains has been generalized by incorporating various dynamic modes (Sections 3.4–3.7). In the high-M
limit, the generalized models recover the reptation power-law, h0 / M 3 . This means that the models
attribute the discrepancies between the h 0 data and the DE prediction to a crossover effect [135] due to
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1329
Fig. 16. Molecular weight dependence of zero-shear viscosity h 0 of bulk, monodisperse linear PB at 258C. For low-M materials
with M , 104 ; the monomeric friction was corrected through WLF analyses. Two solid lines indicate power-law relationships,
h0 / M and h0 / M 3:4 : Reprinted with permission from Macromolecules 1987;20:2226. q 1987 American Chemical Society [48].
finite M of the chains used in the experiments. Considering this point as well as the diffusion data
explained later, Colby et al. [48] measured h 0 of bulk 1,4-polybutadiene (PB) in a surprisingly wide
range of M between 1:0 × 103 and 1:7 × 107 (that corresponds to the range of M/Me between 0.5 and
,10 4). Their results at 258C are summarized in Figs. 16 and 17. (For low-M samples with M , 104 ;
Colby et al. [48] made the correction of the monomeric friction through the standard WLF analysis [1].)
In Fig. 16, a crossover from the Rouse-like behavior (h0 / M; Eq. (44)) to the entanglement behavior
h0 / M 3:4 is observed on an increase of M above M c ù 6:0 × 103 ; and the latter behavior lasts up to
M ù 106 : However, for extremely large M $ 106 ; the M dependence of h 0 appears to become somewhat
weaker. This change is further examined in Fig. 17 where h 0 is reduced by a factor M 3 and plotted
against M. For the high-M samples, the deviation from the 3.4-th power law (solid line) appears to be
larger than the uncertainties in measurements of M and h 0 (shown with the bar). Thus, in the real high-M
1330
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
Fig. 17. Molecular weight dependence of reduced viscosity, M 23 h0 ; of bulk, monodisperse linear PB at 258C. The solid line
indicate a power-law relationship, h0 / M 3:4 : Reprinted with permission from Macromolecules 1987;20:2226. q 1987 American Chemical Society [48].
limit, h 0 may become proportional to M 3 and obey the reptation power-law. In other words, the 3.4-th
power-law behavior may be attributed to the dynamic modes that compete with reptation at finite M.
Thus, for well but not extremely entangled polymers usually used in experiments, say, the polymers
with M # 100M e ; the linear viscoelastic behavior may be described by the generalized tube model
incorporating such competing modes. In fact, the predictions of the models of Doi [134] (Eq. (102)), of
Lin [136], and of Milner and McLeish [152] (Eqs. (144)–(147)), all considering the contour length
fluctuation (CLF), are consistent with the observed 3.4-th power law of h 0. Furthermore, the G 0 and G 00
calculated from the Milner–McLeish model [152] are close to the data, as indicated with the solid curves
for the three high-M samples in Fig. 15. A somewhat better agreement with G(t) data is reported for the
Lin model [136] that assumes G(t) to be given by a sum of independent contributions from reptation,
CLF, fast Rouse modes in each entanglement segment, and a relaxation of the plateau modulus from the
affine-deformation value nkB TM=M e to the DE value 4nkB TM=5M e :
The agreement of the data and the models considering CLF should not be interpreted as an indication
of no significant contributions from other dynamic modes, e.g. the constraint release (CR) and dynamic
tube dilation (DTD). Milner and McLeish [152] suggested that detailed differences between the G 00 data
and their model around the G 00 peak (Fig. 15) are related to the CR contribution. For monodisperse PB of
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1331
M 4:3 × 105 M=M e ù 240; better agreement with the G 00 data (compared to that seen in Fig. 15) is
found for the model of Rubinstein et al. [137] combining reptation and CLF (expressed in the Doi form,
Eq. (99)) with DTD (expressed in the Marrucci form, Eq. (120)).
Concerning the above point, we should note that the CR relaxation time t CR (evaluated from blend
data; Section 4.4.5) is not much larger than the observed ktG lw for the monodisperse systems in a range
of M=M e # 30 [70]. This result suggests non-negligible CR contribution to G p of these systems. Furthermore, differences between the viscoelastic and dielectric loss data of monodisperse polyisoprene
systems of M=M e as large as 30 (explained later in Section 5.4) indicates that the tube is not fixed in
those systems. In other words, the model assuming reptation and CLF in the fixed tube (such as the
models by Lin [136] and by Doi [133,134]) cannot consistently explain the viscoelastic and dielectric
data, no matter how the model excellently describes the viscoelastic data. (This conclusion in turn
demonstrates an importance of comparison of different types of dynamic quantities in examination of
the validity of molecular models for chain dynamics.)
As an experimental test for the CR/DTD effects on the chain relaxation, we can examine the terminal
viscoelastic mode distribution in the high-M limit where h 0 appears to become proportional to M 3. In
this limit, the CLF effect vanishes but the DTD effect may survive (if it results in the proportionality
between G(t) and 1 1 a 2 th power of the survival probability of the dilated tube as formulated in the
Marrucci model; Eq. (120)). The CR effect may also survive because the highest order CR mode has the
characteristic time comparable to the reptation time of the chain. The terminal mode distribution remains
broader than the DE distribution H , t1=2 ; G 00 , v21=2 if the DTD/CR effects survive in the high-M
limit. Experiments [48,137] indicate that the mode distribution remains broad up to M=M e ù 300: It is
interesting and important to examine, in the future work, if the mode distribution changes for larger M/
Me.
4.1.2. Self-diffusion behavior
Figs. 18 and 19 compare some literature data for the self-diffusion coefficients Ds of bulk, monodisperse PS [23–27] and hydrogenated 1,4-polybutadiene (HPB) [28–31]. The data are compared in
respective iso-frictional states (after the correction of the monomeric friction z 0 through WLF analysis
for low-M materials). For large M (.10Mc with Mc being the characteristic molecular weight for h 0), the
Ds data appear to obey the power-law, Ds / M 22 : This M 22 dependence in the high-M regime were
reported also for poly(dimethyl siloxane) [33], poly(ethylene oxide) [33], polybutadiene [34], and
polyisoprene [34].
The above M 22 dependence of Ds has been interpreted as an evidence of reptation in the high-M
regime (cf. Eq. (72)), under the argument that the tube is fixed in this regime and CLF has no effect on
Ds : In fact, an interfacial diffusion experiment [39] using protonated/deutrated block copolymers
(chemically identical to homopolymers) indicated that the chain ends first cross the interface and
then the chain center follows. This result is consistent with the reptation picture.
Moreover, the Ds data shown in Figs. 18 and 19 appear to be quantitatively described from this
picture: in low-M regimes, the Ds data in the iso-z 0 state exhibit the Rouse-like power-law behavior,
Ds / M 21 (Eq. (49)). Evaluating the N M=Me value from GN data (GN nkB TM=Me ; Eq. (189)) and
applying the reptation relationship (Eq. (73)) to the dashed lines that represent the Rouse-like Ds data, we
obtain the solid lines that coincides well with the Ds data in the high-M regime. Correspondingly, the
upward deviation from this reptation line seen at intermediate M was interpreted to result from CR
1332
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
Fig. 18. Self-diffusion coefficient Ds of bulk, monodisperse linear PS reported by Bachus and Kimmich [23], Fleischer [24],
Antonietti et al. [25], Green et al. [26,27]. The Ds data are compared at an iso-frictional state (Tr 2258C for high-M materials)
[72]. The solid line indicates the reptation prediction (Eq. (73) with N M=Me0 ; Me0 18 × 103 ) obtained from the Ds data of
low-M materials (dashed line).
effects on Ds [25,72]. (The reptation prediction is not valid for a product h 0Ds because of the M 3:5^0:2
dependence of h 0 [31].)
Despite the above results, it seems still early to conclude that the pure reptation motion has been
verified from the Ds data in the high-M regime. The h 0 is proportional to M 3:5^0:2 for the chains utilized
in the diffusion measurements, and this M dependence has been related, at least partly, to CLF. Theoretically, the argument of no CLF effects on Ds has been questioned [152,180] (Section 3.4.3) and thus the
M dependence of Ds reported for those chains may need to be analyzed under consideration of reptation,
CLF, and other competing dynamic modes.
Experimentally, the reported M 22 dependence (for large M=M e ) itself may need to be critically reexamined. For HPB, Lodge [32] recently obtained a new set of Ds data in a wide range of M=M e and
made a thorough comparison with other literature data. He suggested that those data are compatible with
a power-law Ds / M 22:3^0:1 in the entire range 1 , M=Me , 103 within uncertainties of respective
experiments. (He also suggested a possibility of the M 22:3^0:1 dependence of Ds for other polymers such
as PS.) This M dependence is close to that reported for concentrated solutions [35,36,38].
We also note a complicated situation for the tracer diffusion coefficient Dtr of a probe in much longer
matrix chains. The probe should exhibit CLF also in this matrix. Thus the probe should have Dtr /
M 22:3^0:1 (M probe molecular weight) if the above M 22:3^0:1 dependence of Ds of monodisperse
systems is exclusively attributed to CLF (plus reptation). However, Green et al. [26,27] and Antonietti
et al. [25] reported that Dtr is proportional to M 22 in bulk PS systems, although the M/Me range covered
in their experiments is narrower than the range covered in the self-diffusion experiments by Lodge [32].
A further complication is noted for concentrated PS solutions for which Nemoto et al. [36,37] reported
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1333
Fig. 19. Self-diffusion coefficient Ds of bulk, monodisperse, linear hydrogenated polybutadienes (HPB) reported by Bartels et
al. [28], Crist et al. [29], von Seggern et al. [30], and Pearson et al. [31]. The Ds data are compared at an iso-frictional state
(Tr 1758C for high-M materials) [31]. The solid line indicates the reptation prediction (Eq. (73) with N M=Me0 ; Me0 1240)
obtained from the Ds data of low-M materials (dashed line).
the M 22.5 dependence of Dtr. The viscoelastic behavior is essentially the same for the PS bulk and
solution systems, and the difference of the Dtr data of these systems raises a puzzling question.
Thus further theoretical and experimental studies are desired for the diffusion properties. Concerning
this point, we note that the M dependencies of Ds, Dtr, and all other dynamic properties predicted from
one particular model are just a result of the molecular motion considered in the model and not identical
to this motion. In other words, the same M dependence may be deduced from more than two models
considering different types of motion. From this point of view, it is also desired to study the chain motion
itself. This motion is differently reflected in various types of measurable, local quantities (specified by
the segment index n), for example, the orientation function S(n,t), local correlation function C(n,t;n 0 ),
and the segmental displacement d(n,t) (cf. Section 2). It is an important subject of future work to extract a
detailed aspect of the chain motion from comparison of the n dependence (configuration dependence) of
these quantities.
4.2. Monodisperse star chains
4.2.1. Viscoelastic behavior
Extensive studies [6–10,49–51] have been made for linear viscoelastic properties of star chains
composed of equal-length arms. Typical results are shown in Figs. 20–22.
Fig. 20 shows G 0 and G 00 data of entangled, 4-arm star polyisoprenes (PI) obtained by Fetters et al.
1334
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
Fig. 20. Storage and loss moduli G 0 and G 00 of bulk, monodisperse 4-arm star PI at 258C [51]. The numbers indicate 1023 Ma
(arm molecular weight). The solid curves indicate the prediction of the Milner–McLeish model. Reprinted with permission
from Macromolecules 1993;26:647 and 1998;31:7479. q 1993/1998 American Chemical Society [51,155].
[51]. The numbers indicate 1023 Ma (arm molecular weight). The plateau modulus is the same for the star
and linear chains, indicating the coincidence of Me for these chains. However, differing from linear
chains (cf. Fig. 15), the high-Ma stars exhibit very broad terminal mode distribution seen as gradual
decreases of both G 0 and G 00 with decreasing v , and the terminal zone rapidly shifts to lower v on an
increase of Ma. These stars exhibit a broad peak of G 00 not in the terminal zone but at much higher v . The
peak frequency scales as vpeak , Ma =Me 22:6 :
Fig. 21 summarizes the h 0 data [51] of star PI chains with various arm numbers per chain, q. These
data are plotted against the span molecular weight 2Ma. Clearly, h 0 is independent of q ( $ 4) and
increases exponentially with Ma (much faster than 3.4-th power of Ma) in the well-entangled regime,
which corresponds to the rapid shift of the terminal zone seen in Fig. 20. Thus, h 0 of the well-entangled
stars is much larger than h 0 of corresponding linear chains having M 2Ma (solid line in Fig. 21).
Fig. 22 shows plots of the product JeGN against the Ma/Me ratio for various star chains (in either bulk
state or solutions) [21]. This product is insensitive to the arm number q and increases linearly with Ma/
Me. This behavior, differing from that of linear chains (Eq. (191)), corresponds to the broadening of the
terminal mode distribution seen in Fig. 20.
The above differences between the star and linear chains demonstrates an importance of the chain end
(branching point) in the global chain dynamics. Considering this point, the tube model has been
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1335
Fig. 21. Dependence of zero-shear viscosity h 0 of bulk, monodisperse star PI at 608C on the span molecular weight 2Ma. The
solid line indicates h 0 of linear polyisoprenes plotted against M. Reprinted with permission from Macromolecules 1993;26:647.
q 1993 American Chemical Society [51].
formulated for the arm retraction mode. The observed, exponential and linear dependencies of h 0 and Je
on Ma/Me, both being insensitive to q, are in harmony with the predictions of these models that assume
the branching point to be fixed in space.
The solid curves in Fig. 20 indicate the prediction of the Milner–McLeish (MM) model [154,155]
with a very minor adjustment for the Ma/Me values. Good agreement seen there suggests the validity of
the arm retraction and dynamic tube dilation concepts incorporated in this model (Section 3.6.2.2).
Fig. 22. Plots of the product JeGN of monodisperse star chains against Ma/Me ratio. The data for 4-arm PB solutions, 4- and 6-arm
PI solutions, and 4- and 6-arm bulk PS are shown. Reprinted with permission from Macromolecules 1984;17:888. q 1994
American Chemical Society [21].
1336
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
A similar degree of agreement with data is obtained for the Ball–McLeish (BM) and Pearson–
Helfand (PH) models if the terminal relaxation time is fitted to the data [153] (for the BM model) or
the arm retraction barrier height is decreased by adjusting the parameter n 0 in Eq. (89) (for the PH
model). Thus the data for monodisperse star chains can be equally well described by several models if
we accept these types of adjustment. However, strong retardation of relaxation [190] and diffusion [41–
43] seen for star chains trapped in high-M matrices (or network) indicates that the tube in the monodisperse star systems is not fixed in space, suggesting an importance of the dynamic tube dilation (DTD)
and constraint release (CR) mechanisms in these systems. (In other words, the models not considering
these mechanisms (Section 3.3) do not fully describe the star dynamics.)
In relation to the above point, we note that the CR relaxation time t CR (evaluated from blend data;
Section 4.4) is close to the observed ktG lw for the monodisperse star chains with the Ma/Me ratio as large
as 6. This result suggests a possibility that those chains fully relax via the CR mode, i.e. during the
internal equilibration for DTD. This point is further explained later in Section 4.4.
Finally, a comment needs to be made for the thermo-rheological complexity (failure of the time–
temperature superposition) of hydrogenated 1,4-polybutadiene (HPB) stars found by Graessley [191]
and Carella et al. [50]. This complexity, not seen for PB, PI, and PS stars, was related to the arm
retraction mechanism [50,191]: the compactly retracted arm has gauche-rich micro-configurations of
the chemical bonds in its backbone. The difference between energies of the trans and gauche states,
significant for HPB but not so much for PB, PI, and PS, provides the HPB star relaxation with an
energetic activation barrier having a temperature (T) independent height. The entropic barrier (considered in the arm retraction models) has a height proportional to T, and a combination of these different
activation processes leads to the complexity of HPB stars. Recently, Levine and Milner [157]
theoretically analyzed this complexity of star chains and showed its relevance to the thermal expansion
coefficient of linear chains.
4.2.2. Diffusion behavior
A considerable amount of diffusion data have been obtained for entangled star chains [40–44]. As an
example, Fig. 23 shows the self-diffusion coefficient Ds of 3-arm HPB star chains at 1768C obtained by
Bartels et al. [41]. For comparison, the tracer diffusion coefficient Dtr in a high-M matrix obtained by
Klein et al. [40] is also shown. Both Ds and Dtr decreases exponentially with Ma/Me, and this dependence
is much stronger than the M 22 (or M 22.3) dependence of linear chains. Similar results were found by
Antonietti and Sillescu [42] and by Shull et al. [43] for Dtr of star PS in crosslinked networks. In addition,
the product h 0Ds for the star chains decreases with increasing Ma, i.e. the decrease of Ds is stronger than
the increase of h 0 [41] again in contrast with the behavior of linear chains (for which h 0Ds increases with
M). These results are in qualitative agreement with predictions of the arm retraction models assuming the
fixed tube (Section 3.3.4).
However, in Fig. 23, we also note that Dtr is much smaller than Ds. This fact means that the tube is not
fixed in the monodisperse star systems and the self-diffusion is significantly accelerated by the tube
motion. Considering this point, Bartels et al. [41] estimated Ds due to both CR and arm retraction. The
result, shown with the solid curve, is close to the Ds data.
Finally, a comment needs to be made for the arm number (q) dependence of Dtr. For a series of PS stars
having the same Ma 55:1 × 103 ù 3:1Me and different q 3 2 12; Shull et al. [44] examined Dtr in
CR-free, high-M linear PS matrices (M 2:0 × 106 and 4:0 × 106 ). They found that Dtr decreases only
by a factor ù1/40 with increasing q from 3 to 12. This weak q dependence is close to that predicted from
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1337
Fig. 23. Self-diffusion coefficients Ds of hydrogenated polybutadiene (HPB) 3-arm star chains in the monodisperse bulk state at
1768C (unfilled circles). For comparison, the tracer diffusion coefficient Dtr of HPB stars in high-M matrices are also shown
(filled circles). Reprinted with permission from Macromolecules 1986;19:785. q 1986 American Chemical Society [41].
the Rubinstein model [45] (Eq. (97)), suggesting that the simultaneous retraction of q 2 2 arms (considered in Eq. (96)) is not required for the diffusion of the star chains with Ma ù 3:1Me : A test of the q
dependence of Dtr for stars with larger Ma is an interesting subject of future studies.
4.3. Monodisperse pom–poms and combs
4.3.1. Pom–poms
A few set of linear viscoelastic data has been reported for monodisperse pom–poms that were
synthesized via coupling of an end-functionalized backbone and living arm anions [59,60]. The simplest
pom–pom is the H-shaped polymers having two arms at each ends of the backbone. Roovers [59]
examined viscoelastic behavior for a series of H-shaped polystyrenes (PS) composed of the backbone
and arm with nearly the same molecular weights, Mb and Ma. For this series, Fig. 24 shows the
dependence of h 0 on the total molecular weight M ù 5Ma ù 5Mb :) For a representative H-shaped
PS, G 0 and G 00 are shown in Fig. 25.
As noted from Fig. 25, the H-shaped PS exhibits two separate relaxation domains at intermediate to
low v where the fast relaxation in each entanglement segment is completed. The intermediate relaxation
(seen at 1022 , v=s21 , 102 ) has been attributed to the relaxation of the arms, and the terminal
relaxation (at v=s21 , 1022 ), to the backbone relaxation.
The arm exhibits broad relaxation mode distribution characterized by the high-v peak of G 00 followed
by gradual decreases of G 0 and G 00 . This feature is similar to that of star chains (cf. Fig. 20) and may be
described by the arm retraction/pom–pom model (considering the tube dilation due only to the arm
motion; cf. Eq. (182)).
The backbone relaxes only after this arm relaxation is completed (because both ends of the backbone
1338
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
Fig. 24. Zero-shear viscosity h 0 of H-shaped PS in the monodisperse bulk state at 169.58C. For these PS, the molecular weight
of each arm Ma is nearly the same as Mb of the backbone. The h 0 data are plotted against the total molecular weight M ù
5M a ù 5M b : For comparison, the M dependence of h 0 of linear PS is also shown. Reprinted with permission from Macromolecules 1984;17:1196. q 1984 American Chemical Society [59].
Fig. 25. G 0 and G 00 of a bulk, H-shaped PS with the arm and backbone molecular weights as indicated. Reprinted with
permission from Macromolecules 1984;17:1196. q 1984 American Chemical Society [59].
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1339
are constrained by the arms). This backbone relaxation behavior changes with a reduced molecular
weight of the backbone, y bMb (y b backbone volume fraction in the system).
If y bMb is smaller than Mc0 (characteristic molecular weight for h 0 of bulk linear chains; cf. Eq. (190)),
the backbones are not mutually entangled. This is the case for most of the H-shaped PS examined by
Roovers (including that shown in Fig. 25). For this case, we observe a characteristic power-law-like
behavior in the terminal regime, G 0 , G 00 , vb with b ù 1=2; which can be attributed to the CR
relaxation of the backbone.
This CR relaxation, induced by the arm motion, is expected to have a local relaxation time t a ( arm
relaxation time) that increases exponentially with Ma (see Section 3.9). The observed, exponential
dependence of h 0 on M (ù 5Ma ; Fig. 24) is in harmony with this expectation. This dependence is
stronger than that seen for star PS [59]. The backbone motion of the H-shaped PS results from accumulation of the local (arm) relaxation processes each occurring at t a, and this accumulation effect would
have led to the stronger M dependence of h 0 of the H-shaped PS. Roovers [59] also showed that the
recoverable compliance characterizing this motion increases almost in proportion to M and is reasonably
close to that calculated from the Rouse–Ham model. This result may indicate that the CR relaxation
process of the backbone is (approximately) described by the Rouse–Ham-like dynamics.
For the case of y bMb, well above Mc0 ; the backbones are mutually entangled. This is the case for some
of the pom–pom polybutadienes (PB) examined by Archer and Varshney [60]. These pom–pom PB
exhibit the arm relaxation (with broad mode distribution) and much slower backbone relaxation, the
latter associated with a peak of G 00 (not the power-law decay) in the terminal regime. This behavior
appears similar to that of entangled linear chains in solution, and the tube dilation picture may be
applicable to the backbone relaxation.
Although the generalized tube model can qualitatively explain the above behavior of the pom–poms,
no quantitative comparison has been made. In addition, the data have not been obtained in a full range of
the molecular parameters, i.e. Ma, Mb, and the arm number q at each ends of the backbone. Quantitative
comparison of these extensive data with the model, in particular for the q dependence of the viscoelastic
properties, is an interesting subject of future work.
4.3.2. Combs
Linear viscoelastic behavior of model comb polymers were examined by Roovers and Graessley [56]
(for comb PS) and by Roovers and Toporowski [57] (for comb PB). The behavior is qualitatively similar
to that of the H-polymers in a sense that the grafted arms relax first and then the backbone relaxation
follows. The predictions of the Rouse-CR model for this backbone relaxation, the terminal relaxation
time t 1 and intensity I1 that scale as t1 ~M b 2 ta and I1 ~y b RT=M b ; were found to be consistent with the data
[57].
Here, a comment needs to be made for the model combs used in the above studies. These combs were
synthesized from backbones on which reactive sites (e.g. lithiated double bonds in the case of PB) were
statistically distributed. Thus, those combs have some distribution in an interval molecular weight of the
backbone between the grafted arms, Mint. This distribution was not characterized independently, and its
effect on the viscoelastic data was not clarified (although the distribution would be rather narrow and the
effect is expected to be minor for some combs having densely grafted arms). It is desired to synthesize a
model comb having no distribution in Mint and study the dependence of its viscoelastic behavior on Mb,
Ma, and Mint. This study is important in particular for understanding the behavior of combs having
scarcely grafted arms (for which the above synthetic route usually introduces a wide distribution of
1340
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
Mint). A challenge for this synthesis was recently made by utilizing a selective reactivity of anions, and
results of preliminary viscoelastic measurements were in harmony with the CR model prediction [58].
4.4. Blends
Binary blends composed of two chemically identical monodisperse components are the simplest
model system for general polydisperse cases. Despite this simplicity, a rich variety of relaxation
behavior is observed for the blends according to several factors, i.e. the component molecular weights,
volume fractions, and topological structures (e.g. linear, star-branched, etc). The key issue raising this
variety is changes of the lifetime of entanglements for respective components with these factors.
This section focuses the behavior of binary blends of monodisperse components (mostly linear
components) and discusses how this lifetime affects the viscoelastic behavior. In the remaining part
of this section, the molecular weights of the high-M and low-M components are denoted by M2 and M1,
respectively, and the volume fractions of these components, by y 2 and y 1. Some data shown below are for
melt (bulk) blends, and others are for plasticized blends with total polymer volume fraction ypol 0:6:
4.4.1. Overview
As an example of the behavior of the blends with M2 q M1 (more precisely, M2 Me2 =M13 q 0:1),
Fig. 26 shows G 0 and G 00 data of melt blends of monodisperse linear polystyrenes (PS) with M2
427 × 103 and M1 38:9 × 103 obtained by Watanabe and Kotaka [68]. The numbers indicate y 2. The
blends clearly exhibit fast and slow relaxation processes. The fast process is attributed to full relaxation
of the low-M component and partial relaxation of the high-M component, and the slow process corresponds to relaxation of the remaining entanglement constraint for the high-M component. The relaxation
of the low-M component becomes 2–3 times slower in the blends with large y 2 than in its monodisperse
state y 2 0; as noted clearly for the G 0 data. This retardation effect, indicating an increase of the
entanglement lifetime for the low-M component due to the high-M component, is in harmony with the
molecular pictures of constraint release and tube dilation.
Now, we focus the terminal relaxation behavior of the high-M component. For this purpose, the G 0 and
00
1:5
G data of the above blends are multiplied by y 22
2 and plotted against a reduced frequency y 2 vaT in
Fig. 27. In Fig. 28, the G 0 data are multiplied by y 21
2 and plotted against v aT.
If the behavior of the high-M component in the blends is identical to that in concentrated (entangled)
solutions at an iso-frictional state, the terminal relaxation time and intensity of this component scale as
a
y 21:5^0:2a and y 11
(cf. Eqs. (189)–(192)), and the relative distribution of the terminal relaxation modes
2
is close to that of the monodisperse system of the high-M component. The exponent a is close to unity
p
1:5
for PS. Then, for this monodisperse system and the blends, the plots of y 22
2 G against y 2 vaT should
coincide with each other at low v . In Fig. 27, this coincidence is noted for y 2 0:4; and the blend data
for y 2 0:2 are also close to the monodisperse data. Clearly, this result is contradictory to the Doi–
Edwards prediction (Eq. (66)).
If the behavior of the high-M component in the blends corresponds to that in dilute (non-entangled)
solutions at an iso-frictional state, the terminal relaxation time and intensity of this component scale as
0
y 02 and y 12 ; and the terminal mode distribution is independent of y 2. For this case, the y 21
2 G data of the
blends at low v should coincide with each other. In Fig. 28, this coincidence is noted for small y 2 #
0:05; see the collapse of the data points around the solid curve.
0
For the high-M component exhibiting the dilute solution-like behavior, this collapse of the y 21
2 G data
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1341
Fig. 26. G 0 and G 00 of binary melt blends of monodisperse linear PS at 1678C. The numbers show the volume fraction y 2 of the
high-M component M2 427 × 103 ; y 2 0 and 1 correspond to the pure components. Reprinted with permission from
Macromolecules 1984;17:2316. q 1984 American Chemical Society [68].
is observed because the G 0 at low v is hardly contributed from the rapidly relaxing low-M component. In
contrast, the low-M component largely contributes to G 00 for small y 2 ( # 0.05) even at low v , and no
00
collapse is observed for the y 21
2 G data. (This situation is common to all dilute solutions.) Thus we can
subtract the contribution of the low-M component from the viscoelastic quantities of the blends and
further examine the terminal relaxation behavior of the high-M component. For this purpose, we can
utilize a formal blending law for the relaxation spectrum HB of the blend [70]
HB t y 1 H~ 1;B t; M1 ; M2 ; y 2 1 y 2 H~ 2;B t; M1 ; M2 ; y 2
193
1342
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
0
22 00
1:5
Fig. 27. Plots of reduced moduli y 22
2 G and y 2 G against the reduced frequency y 2 vaT for the PS/PS blends examined in Fig.
0
00
26. The numbers indicate y 2. These reduced moduli coincide with G and G of the pure high-M component (filled diamonds) if
the behavior of this component in the blends is identical to that in concentrated (entangled) solutions at an iso-frictional state.
Here, H~ 1;B and H~ 2;B are the spectra of the low-M and high-M components placed in the blend: these H~ 1;B
and H~ 2;B are normalized (in its intensity) to unit volume fraction of respective components. In general,
these spectra change with M1, M2 and y 2 and thus do not coincide with the normalized spectra y 21
pol Hi;m
i 1; 2 of the components in the monodisperse states.
Eq. (193) is merely a restatement of the stress additivity, Eqs. (4) and (7). However, for the blends
with small y 2, Eq. (193) gives a useful basis for evaluation of the quantities of the dilute high-M
component. In such blends, the behavior of the low-M component is negligibly affected by the highM component and thus H~ 1;B can be replaced by the normalized spectrum y21
pol H1;m of the low-M
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1343
0
Fig. 28. Plots of the reduced modulus y 21
2 G against the frequency v aT for the PS/PS blends examined in Fig. 26. The symbols
are the same as in Figs. 26 and 27. The reduced modulus is independent of y 2 if the behavior of the high-M component in the
blends is identical to that in dilute (non-entangled) solutions at an iso-frictional state.
component in its monodisperse system (having the same, total polymer content y pol as the blend). Then,
the complex modulus of the high-M component in the blend Gp2;B v is evaluated from the moduli data of
this monodisperse system and the blend, Gp1;m v and GpB v; as
!
y1
p
p
G2;B v GB v 2
Gp1;m v
194
y pol
Consequently, the viscosity and compliance of the high-M component in the blend, h 2,B and J2,B, are
evaluated from the corresponding data of the monodisperse system of the low-M component and the
blend as [70]
h2;B hB 2
!
y1
h ;
y pol 1;m
J2;B
JB hB 2 2 y 1 =y pol J1;m h1;m 2
h2;B 2
195
(The second subscript “m” or “B” attached to h i and Ji of the component i specifies whether the
discussed quantity is for this component in its monodisperse system or in the blend.)
yR2 H~ 2;B (Eq. (193))
The Gp2;B v, h 2,B and J2,B of the high-M component are related to its spectrum
P
…dln t: Thus
~
through Eqs. (16) and (17) with the replacements hp ! y 2 H 2;B ; tp ! t; and p ! ∞
2∞
the product J2,Bh 2,B gives the second-moment relaxation time of the high-M component in the blend
1344
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
Fig. 29. Plots of the viscosity h 2,B of the high-M component in binary melt blends of monodisperse linear PS against the volume
fraction y 2 of this component. The numbers indicate 1023 M2 : The M1 of the low-M component is 38:9 × 103 (for unfilled
symbols) and 72:4 × 103 (for filled symbols). The thick arrows indicate a critical volume fraction for the onset of entanglement
between the high-M component chains, y c Mc0 =M2 : (Data taken from Refs. [68–70].)
(cf. Eq. (18))
Z∞
kt2;G lw J2;B h2;B
2∞
Z∞
t2 H~ 2;B dlnt
2∞
tH~ 2;B dlnt
196
In blends with large y 2, the relaxation of the low-M component is retarded (by a factor # 3) due to the
concentrated high-M component therein (cf. Fig. 26). In principle, we have to consider this retardation
effect when we subtract the contribution of the former component to evaluate Gp2;B v; h 2,B and J2,B of the
latter. However, in such blends with M2 q M1 ; the low-M component has only minor contribution to the
blend quantities at low v . Thus we may safely neglect the retardation effect and utilize Eqs. (194)–(196)
also for the cases of large y 2 (and M2 q M1 ).
Fig. 29 shows the y 2 dependence of h 2,B thus obtained for the high-M components (with
M2 $ 315 × 103 ) in binary PS/PS melt blends at 1678C [68–70]. The low-M components are much
shorter than the high-M components and have M1 38:9 × 103 (for unfilled symbols) and/or 72:4 × 103
(for filled symbols). The J2,B data of these high-M components are shown in Fig. 30.
In Fig. 29, the thick arrows indicate a critical y 2 value at the onset of entanglements between the
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1345
Fig. 30. Plots of the recoverable compliance J2,B of the high-M component in binary melt blends of monodisperse linear PS
against the volume fraction y 2 of this component. The symbols are the same as in Fig. 29. (Data taken from Refs. [68–70].)
high-M component chains, yc Mc0 =M2 with Mc0 being the characteristic molecular weight for h 0 of the
bulk system (Mc0 ù 32 × 103 for PS). We clearly note a change in the y 2 dependence of h 2,B, h2;B / y 2
for y 2 , yc and h2;B / y 3:5
2 for y 2 well above y c; see also Ref. [75, Figs. 3 and 4]. J2,B changes its y 2
dependence from J2;B / y 21
to J2;B / y 22
2
2 ; and this change occurs at y 2 3–4y c (cf. Fig. 30).
Correspondingly, the relaxation time kt 2,Glw of the high-M component is independent of y 2 for
y 2 , yc and increases in proportion to y 1:5
2 for y 2 well above y c. These results, commonly noted in
blends with M2 q M1 [68–71,73–75], are similar to those seen for non-entangled y 2 , y c and
entangled y 2 . y c solutions of the high-M chains at an iso-frictional state. Thus the low-M components in those blends behave as a solvent for the much longer components at low v .
In Figs. 29 and 30, we also note that h 2,B rapidly increases with M1 at y 2 , y c and this M1 dependence
becomes weaker at y 2 . y c ; while J2,B is insensitive to M1 in the entire range of y 2; see the data for
1023 M2 1190 and 2810. Thus the M1 dependence of kt 2,Glw becomes weaker on the increase of y 2
above y c (and finally vanishes for y 2 q y c ).
It should be emphasized that the above solution-like behavior is not always observed. As an example,
Fig. 31 shows the G 00 data of binary melt blends of monodisperse linear polybutadienes (PB) reported by
Struglinski and Graessley [81]. The M1, M2, and y 2 of the PB components are similar to those of the PS
components examined in Fig. 26. However, the PB chains are much more heavily entangled than the PS
chains because Me is much smaller for PB than for PS (1023 Me 1:85 and 18 for bulk PB and PS).
Correspondingly, the high-M PB component chains are mutually entangled among themselves in all
blends examined in Fig. 31: These blends have y 2 M2 q Mc0 (ù 6 × 103 for bulk PB).
In such heavily entangled PB/PB blends, the relaxation of the low-M component is retarded by a factor
ù 3 with increasing y 2 ! 1 (see the shift of the high-v peak of G 00 in Fig. 31). This behavior is similar to
1346
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
Fig. 31. G 00 of binary melt blends of monodisperse linear PB with M1, M2, and y 2 as indicated. The dashed curve shows the minimum
shift of the G 00 -peak frequency v peak expected for solutions of the high-M component at an iso-frictional state, vpeak y 2
y 221:2 vpeak 1: Reprinted with permission from Macromolecules 1985;18:2630. q 1985 American Chemical Society [81].
that seen in Fig. 26. However, the relaxation of the high-M PB component is not accelerated by the lowM component, as noted from the lack of shift in the low-v peak with decreasing y 2: the dashed curve
indicates the minimum shift of the peak frequency expected for solutions of the high-M PB component in
vpeak 1 [81]. The observed shift (if any) is much smaller than
an iso-frictional state, vpeak y 2 y 21:2
2
this estimate. Thus, the low-M PB component does not behave as the simple solvent for the relaxation of
the high-M PB component.
Struglinski and Graessley [81] suggested that the low-M component behaves as the solvent only when
a parameter M2 Me2 =M13 is larger than a critical value ù 0:1 : M2 Me2 =M13 ù 2:4 for the PS/PS blends
examined in Fig. 26, and M2 Me2 =M13 ù 0:022 for the PB/PB blends examined in Fig. 31. The parameter,
M2 Me2 =M13 N2 =N13 Ni Mi =Me ; is utilized to specify the criterion for the reptation in the dilated tube
(see Section 3.6.1.2). The observed lack of the acceleration of the high-M component relaxation (Fig. 31)
suggests the lack of this type of reptation for this component.
Despite this lack of the acceleration, the behavior of the high-M PB component is still different from
the Doi–Edwards (DE) prediction. The terminal relaxation intensity of this component, reflected in the
1
height of the low-v peak of G 00 , scales as y 2:2
2 ; not as y 2 (the DE prediction; Eq. (66)). Correspondingly,
22:2
the compliance JB of the PB/PB blend scales as y 2 for large y 2 (where JB is close to J2,B of the high-M
component) [81]. These features are further discussed later in Section 4.4.2.2.
4.4.2. Behavior of blends with y 2 M2 . Mc0
4.4.2.1. DTD criterion The dynamic tube dilation (DTD) is intimately related to the mutual equilibration of the entanglement segments of the chain; see Section 3.6.1.3. The equilibration in an enlarged tube
segment of size a 0 b1=2 a requires a time t pp , twb 2 (tw entanglement lifetime), and the tube can
actually dilate to this a 0 only at t $ tpp : In addition, the chain contour length measured along the dilated
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1347
Fig. 32. Comparison of the viscoelastic moduli of two PS/PS binary melt blends with M2, y 2, and M1 as indicated. M2 and y 2 are
the same for the two blends but M1 is different. The dashed curves indicate the behavior of the low-M components in their
monodisperse states. The comparison is made at an iso-frictional state (with the fractional free volume fr 0:0644): the
reference temperatures are T r 159 and 1678C for the blends with M1 10:5 × 103 and 38:9 × 103 ; respectively. Reprinted
with permission from Macromolecules 1985;18:1436. q 1985 American Chemical Society [70].
tube is equilibrated at t ppp , twN 2 , t CR (global CR time), and the chain is considered to reptate along
this tube with its intrinsic curvi-linear diffusion coefficient Dc ( Nz /kBT) only at t . tppp :
For y 2 M2 . Mc0 and M2Me2/M13 q 0.1, the behavior of the high-M component in the blends at low v is
identical to that in entangled solutions; see Figs 26–30. This experimental fact suggests a possibility that
a) at such low v . The criterion for this type
this component reptates in the dilated tube (with a 0 y 21=2
2
of reptation is further examined below for the data at higher v .
Fig. 32 compares G p data for two PS/PS binary melt blends having the same M2 ( 427 × 103 ) and y 2
( 0.4) but different M1 [70]. The comparison is made at an iso-frictional state. In one blend with M1
10:5 × 103 , Me0 ; the low-M component (matrix) chains do not entangle with the high-M component
(probe). The data for this blend (unfilled circles) are utilized as the reference data of the probe solution.
In other blend, the matrix chains (with M1 38:9 × 103 . Mc0 ) entangle with the probe.
For the probe M2 427 × 103 dilutely blended in this entangling matrix, the terminal relaxation
occurs via the CR mechanism [68,70]. The CR frequency v CR ù 1=tppp for this dilute probe is shown in
Fig. 32 with the solid arrow [70]. The dashed arrow indicates y 2 M2 =Me0 2 vCR ù 1=tpp y 2 b21 0:4:
We note that the G p data of the blend with M1 38:9 × 103 (filled circles) are in close agreement with
the reference data of the solution (unfilled circles) only at low v , vCR (i.e. t . tppp ). The difference
between these data seen at vCR , v , y 2 M2 =Me0 2 vCR is partly due to a contribution of the fast
relaxation modes (G p-tails following the high-v rubbery plateau). However, an analysis (subtraction
1348
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
of this contribution) suggested a considerable difference of the probe behavior in the blend and solution
at v . vCR [70,74]. This difference of the probe behavior was more clearly observed for smaller y 2 (and
larger M2) [74]. Thus experiments strongly suggest that the probe reptates in the dilated tube with its
intrinsic Dc only in long time scales (.t ppp) where the probe contour length measured along this tube is
equilibrated via the global CR modes.
For dilute probes in much shorter matrix chains, the above result in turn suggests that the reptation
does not occur in the free dilation regime considered by Doi et al. (Eq. (112)) [142]; see Section 3.6.1.2.
Instead, the CR dominates the probe relaxation in this regime (Eq. (115)), as discussed by Viovy et al.
[144]. Concerning this point, we note that the probe relaxation becomes slower (kt 2,Glw begins to
increase) on an increase of y 2 above y c Mc0 =M2 ; see Figs. 29 and 30. This result also favors the
argument by Viovy et al. [144]. (The argument by Doi et al. [142] suggests an onset of the increase
of kt 2,Glw at y 2 ù M13 =Me2 M2 ; see Section 3.6.1.2.)
However, we should also note a difference between experiments and the model of Viovy et al. [144].
They suggested leveling-off of the probe relaxation time for y 2 above ù Me3 =M13 while the observed
kt 2,Glw continuously increases up to y 2 1 (cf. Figs. 29 and 30). This difference may be partly related to
the contour length fluctuation (CLF) of the chain in the dilated tube that is not incorporated in the model
of Viovy et al. Thus, although Viovy et al. [144] ruled out the reptation motion along the dilated tube
under absence of CLF (cf. Eq. (114)), this motion (with CLF) seems to be important in actual binary
blends that have finite M1 and M2 in a range of M2 Me2 =M13 q 0:1 and y 2 M2 q Mc0 : In fact, the relaxation
behavior of binary and ternary blends can be consistently explained by considering an increase of Me for
the terminal relaxation (that leads to reptation in the dilated tube) [73]. Further studies are desirable for
self-consistent description of the chain motion in the dilated tube under consideration of all possible
dynamic modes.
4.4.2.2. Description of G p data Now we turn our attention to quantitative description of the G p data of
blends with large y 2. For the cases of y 2 M2 @ Mc0 and M2 Me2 =M13 @ 0:1; the blend data at v , vCR
coincide with the solution data for the high-M component at the iso-frictional state (see Fig. 32). Then,
models applicable to the monodisperse solutions (e.g. those examined in Section 4.1.1) can be used to
describe the slow relaxation behavior, i.e., the GpB data at v , vCR ; viscosity, compliance, and terminal
relaxation time. For description in a wider range of v and/or wider range of the parameter M2 Me2 =M13 ;
models incorporating all possible dynamic modes of both high-M and low-M components are required.
Rubinstein and Colby [85] examined various types of combination of these modes within the context
of the generalized tube model. They also calculated the CR relaxation function by considering CLF
effects and a distribution of the entanglement lifetime, and proposed a model combining reptation, CLF,
and CR. In Fig. 33, predictions of their model (curves) are compared with G 00 data for PB/PB binary
blends (bottom panel; y 2 0:882; 0.768, and 0.638 for circles, squares, and triangles) and the two
components (top panel; M1 70:9 × 103 and M2 355 × 103 for squares and circles). These blends
have M2 Me2 =M13 3:4 × 1023 ! 0:1 and thus the relaxation of the high-M component chain is not
accelerated by the low-M component chains, as similar to the behavior of the blends examined by
Struglinski and Graessley (Fig. 31).
For the above case, the high-M chain does not reptate along the dilated tube with its intrinsic Dc, and
the situation is more or less similar to that depicted in Fig. 9c: In time scales .tw (lifetime of an
entanglement due to the low-M chains), the high-M chain explores all local configurations in the dilated
a
a 1 2 1:3:
tube formed by other high-M chains to have the terminal relaxation intensity , y 11
2
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1349
Fig. 33. Comparison of the G 00 data of binary PB/PB blends (bottom panel; y 2 0:882; 0.768, and 0.638 for the circles, squares,
and triangles) and the two components (top panel; M1 70:9 × 103 and M2 355 × 103 for squares and circles) with predictions of the Rubinstein–Colby model considering reptation, contour length fluctuation, and constraint release (curves).
Reprinted with permission from J Chem Phys 1988;89:5291–306. q 1988 American Institute of Physics [85].
However, this equilibration time is longer than the unit time for reptation in the dilated tube and thus the
high-M chain reptates along the fluctuating but non-dilated tube to exhibit the y 2-independent relaxation
time [81]. This behavior of the PB/PB blends is well described by the Rubinstein–Colby model [85] as
one extreme case (cf. Fig. 33). A similar degree of agreement with data was reported for the double
reptation model (Eq. (148)) [146] and for the Rubinstein–Helfand–Pearson model [137], the latter
combining reptation, CLF, and dynamic tube dilation.
Despite the above agreement with the data, the Rubinstein–Colby model [85] has a limitation. Since
the model utilizes the product form for the normalized relaxation modulus m (cf. Eqs. (149) and (150)),
the model seems to (implicitly) include an assumption of configuration independent CR (CICR; see
Section 3.7.3). This assumption is rather harmless for blends with large y 2, because the CR relaxation
intensity of the high-M component in such blends scales as y 2 2 y 22 ; a factor representing the difference
1350
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
Fig. 34. G 0 of binary, plasticized PS/PS blends with M1, M2, and y 2 as indicated. The total PS content is y pol 0:6: The dashed
curves indicate G 0 of the low-M components in the monodisperse, plasticized states y 1 y pol 0:6: The high-M component
chains in the blends are dilute and entangled only with low-M component chains. Reprinted with permission from Macromolecules 1991;24:5573. q 1991 American Chemical Society [75].
between the high-v and low-v rubbery plateau heights of this component. For large y 2, this factor is
minor compared to y 22 (,low-v plateau height), and the CICR assumption does not introduce significant
numerical changes in the calculated moduli. (Note that the PB/PB blends examined in Fig. 33 have
considerably large y 2.) However, for small y 2, the CICR assumption, or the assumption of product form
of m , raises a serious problem, as most clearly noted for the cases of y 2 M2 , Mc0 examined below.
4.4.3. Behavior of blends with y 2 M2 , Mc0
4.4.3.1. General features Fig. 34 shows the G 0 data of binary, plasticized PS/PS blends at 718C
obtained by Watanabe et al. [75]. The plasticizer is dioctyl phthalate (DOP), and the total PS content
is ypol 0:6: The dashed curves indicate G 0 of the low-M components (matrix) in the monodisperse,
plasticized state y 1 ypol 0:6: The high-M component (probe) has M2 1810 × 103 ; and v 2
0:015 y 2 M2 , Mc0 : This probe is in the dilute regime [75] (where h2;B / y 2 and J2;B / y 21
2 ) and
entangled only with the matrix chains. The Me for the plasticized systems is Me Me0 =y pol 30 × 103
(cf. Eq. (192)), and the Struglinski–Graessley parameter is M2 Me2 =M13 4:48; 0.85, 0.32, 0.052 and
0.0035 for 1023 M1 71:4; 124, 172, 315, and 775, respectively.
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1351
0
Fig. 35. Reduced storage modulus y 21
2 G 2;B of the high-M components in binary, plasticized PS/PS blends with M2 and M1 as
indicated. The total polymer content is y pol 0:6 in all blends, and the data are compared at an iso-frictional state (with the
fractional free volume f r 0:0644). The high-M component chains (probes) are dilute and entangled only with the low-M
component chains (matrices); y 2 0:01 and 0.015 for the probes with M2 2810 × 103 and 1810 × 103 ; respectively. The
0
0
2
y 21
2 G 2;B curves are shifted along the frequency axis by factors l so that their low-v tails G / v are superposed with each
other. (Data taken from Refs. [71,75,78].)
Since the dilute probe negligibly affects the behavior of the matrices, we observe no detectable
difference of G 0 for the blends and matrices at high v where the matrices have not relaxed. However,
at low v where the matrix relaxation is completed, G 0 is larger for the blend and the relaxation of the
dilute probe is clearly observed. The probe relaxation is faster for smaller M1, clearly demonstrating the
CR effect on this relaxation.
Viscoelastic quantities of dilute probes can be evaluated by subtracting matrix contributions from the
blend quantities (Eqs. (194)–(196)). As an example, Fig. 35 shows the reduced storage modulus
0
23
y 21
2 G 2;B for two dilute probes (10 M2 1810 and 2810) in plasticized blends y pol 0:6 [71,75,78].
0
0
0
The y 21
2 G 2;B data are shown only at low v where G B of the blends is sufficiently larger than G 1;m of the
21 0
pure matrices, and the y 2 G 2;B data include negligible uncertainties due to the subtraction.
1352
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
R
Fig. 36. Plots of reduced compliance J2;B
of dilute probe PS against M1/Me ratio of linear PS matrices. All blends examined are
plasticized y pol 0:6: Circles; for a linear probe with M2 2810 × 103 ; triangles; for a 4-arm star probe with M a 410 ×
103 : Square shows J2R for the linear probe in its monodisperse state y pol 0:6: The horizontal solid and dashed lines indicate
R
the Rouse–Ham values for J2;B
of the linear and star probes, respectively. (Data taken from Refs. [71,76,78].)
0
The relaxation mode distribution of the dilute probes is observed as the v dependence of y 21
2 G 2;B (cf.
0
Eq. (16)), i.e. as the shape of the y 21
2 G 2;B curves plotted against v in the double-logarithmic scale. For
0
the clearest comparison of this shape, the y 21
2 G 2;B curves in Fig. 35 are shifted along the v axis by
21 0
2
factors l so that their low-v tails y 2 G 2;B / v are superposed on the tail for the probe in the shortest
matrices examined (with 1023 M1 71:4 and 72.4 for the probes with 1023 M2 1810 and 2810). In
0
matrices much shorter than the probe, the y 21
2 G 2;B curves have the same shape and thus the probe has the
universal terminal relaxation mode distribution irrespective of M1; see unfilled circles. In contrast, the
mode distribution changes with M1 as M1 is increased above a certain critical value; see filled circles.
(These features are noted also for the raw G 0B data; see Fig. 34.)
R
c2 RTJ2;B =M2
The change of the mode distribution is also observed for the reduced compliance J2;B
R
(c2 probe concentration in mass/unit volume). In Fig. 36, J2;B of the linear dilute probe with M2
2810 × 103 (examined in Fig. 35a) is plotted against the M1/Me ratio of the matrices (circles) [71,78]. For
R
is insensitive to M1/Me and thus the probe exhibits the universal mode distribution. The
M1 =Me , 10; J2;B
R
R
value in this universal regime is close to the Rouse value, JRouse
0:4 (horizontal solid line). For
J2;B
R
larger M1/Me, J2;B decreases with increasing M1/Me. This decrease indicates that the probe mode distribution becomes sharper and its terminal relaxation intensity increases with M1/Me (as can be noted also
in Fig. 35). These features are commonly observed for probes of various M2 in either plasticized
[71,75,76] or melt [68–70,74] blends. Examination of the data for those probes indicated that the
universal mode distribution of the dilute, linear probe is observed when the Struglinski–Graessley
parameter M2 Me2 =M13 is larger than ù 0:5:
For 4-arm star PS chains in linear PS matrices, the dilute solution-like behavior h2;B / y 2 ; J2;B /
21
y 2 is observed for y 2 , Mc0 = gM2 [77] where M2 is the molecular weight of the star chains and g
R
0:625 is the Rouse–Ham shape correction factor (g 3q 2 2=q2 for q-arm star chains). In Fig. 36, J2;B
3
is shown for such dilute probe star PS Ma 410 × 10 in linear PS matrices (triangles) [76]. For
R
value is independent of M1/Me and close to the Rouse–Ham value shown with the
M1 =Me , 10; the J2;B
R
R
decreases for larger M1/Me. Thus, as similar to
dashed line, JRH 0:184 (cf. Eq. (108) with q 4). J2;B
the behavior of linear PS probes, the mode distribution of the star PS probe remains the same for small
M1/Me but becomes sharper with increasing M1/Me above a certain value [76]. If we extend the
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1353
Fig. 37. Dependence of the terminal viscoelastic relaxation time of dilute high-M probe in PS/PS binary blends on the M1/Me
ratio of the shorter matrix chains. The numbers indicate 1023 M2 of the probes. The second-moment relaxation time of the
probe, , t2;G .w h2;B J2;B ; is indicated with the squares (for melt blends) and circles (for plasticized blends with y pol 0:6).
Triangles indicate a relaxation time tl K l; where l is the shift factor utilized in the superposition of the low-v tails of
0
y 21
2 G 2;B curves (cf. Fig. 35) and K is a numerical factor that equates tl and kt 2,Glw of each high-M chain in the shortest matrix
examined. The unfilled symbols indicate that the probe has the universal relaxation mode distribution (cf. Fig. 35), and the filled
symbols denote the break-down of this universality. All data are compared at an iso-frictional state with the fractional free
volume f r 0:0644: (Data taken from Refs. [68–71,75,76].)
Struglinski–Graessley parameter to the star probe by utilizing the span molecular weight 2Ma in place of
M2, the threshold value of this parameter above which the star PS probe exhibits the universal mode
0
2
3
distribution (detected as the universal shape of the y 21
2 G 2;B curves [76]) is estimated to be 2Ma Me =M1 ù
0:15: This value is smaller than the threshold value for linear PS probe ù 0:5:
Now, we turn our attention to the terminal relaxation time of the probe, kt 2,Glw (Eq. (196)). Fig. 37
shows dependence of kt 2,Glw of dilute linear probes in PS/PS melt blends [68–70] (squares) and plasticized blends [71,75,76] (circles; ypol 0:6) on the M1/Me ratio of linear matrices. The numbers indicate
1023 M2 of the probe. The data are compared at an iso-frictional state with the fractional free volume
1354
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
fr 0:0644 (Tr 1678C for melt blends, Tr 54 and 718C for the blends plasticized with dibutyl
phthalate and dioctyl phthalate, respectively).
The dilute probe exhibits the universal mode distribution in much shorter matrices (cf. Figs. 35 and
36). In this universal regime, changes of the probe relaxation time with M1/Me are most accurately
0
examined for the shift factor l (that achieves the superposition of the y 21
2 G 2;B curves in a wide range of
v ). Thus, a relaxation time evaluated from this factor, tl K l; is also shown in Fig. 37 (triangles). For
each probe, the numerical prefactor K was determined by equating this t l and kt 2,Glw in the shortest
matrix examined.
In Fig. 37, the data for the probe in the above universal regime are shown with the unfilled symbols.
The kt 2,Glw in this regime agrees well with t l (meaning the high accuracy of the kt 2,Glw data) and rapidly
increases with M1/Me. For both melt and plasticized blends (y pol 0:6 for the latter), those kt 2,Glw data
can be well summarized by an empirical power-law relationship [70–72,76]
kt2;G lw =s ù 1:2 × 10212 M13 M22 Me23
fr 0:0644; M2 Me2 =M13 $ 0:5
197
for linear PS probe in linear PS matrices.
On the other hand, in the non-universal regime where the probe mode distribution changes with M1/Me
(shown with filled symbols), kt 2,Glw exhibits weaker M1/Me dependence and deviates from t l (because
t l does not give a correct measure of the relaxation time in the non-universal regime).
In linear PS matrices, the dilute 4-arm star PS probes (having y 2 , Mc0 = gM2 with g 0:625)
exhibits similar behavior [76]. kt 2,Glw shows power-law dependencies on the matrix and probe molecular
weights M1 and M2 when the probe has the universal mode distribution in much shorter matrices, while
the M1 dependence becomes weaker when M1 is increased above a certain threshold. The power-law
dependencies in the universal regime, observed for plasticized blends with y pol 0:6; are summarized
as [76,78]
kt2;G lw =s ù 1:4 × 10213 M13 M22 Me23
fr 0:0644; 2Ma Me2 =M13 $ 0:15
198
for 4-arm star PS probe in linear PS matrices.
4.4.3.2. Pure CR behavior The changes in the probe mode distribution with M1/Me (Figs. 35 and 36)
indicate that the probe is relaxing via several mechanisms. Within the context of the generalized tube
models, the constraint release (CR) mechanism is competing with other mechanisms such as reptation,
and changes in relative contributions of these mechanisms are reflected in changes of the probe mode
distribution. When the CR wins the competition to dominate the probe relaxation, this distribution
becomes universal irrespective of the M1/Me value. Thus, the mode distribution can be utilized as an
experimental measure of the CR contribution to the relaxation of actual probes.
From this point of view, Fig. 38 compares storage moduli G 02;B obtained for various linear PS probes in
linear PS matrices [68–71,75]. The inequality M2 Me2 =M13 $ 0:5 holds for all pairs of the probe and
matrix examined here, and the dilute solution-like behavior (h2;B / y 2 and J2;B / y 21
2 ; cf. Figs. 29 and
30) was confirmed for respective probes. For the clearest comparison of the probe mode distribution, the
normalized modulus M2 G 02;B =c2 RT are plotted against the reduced frequency v kt 2,Glw. For comparison,
plots are shown also for a dilute polyisoprene (PI) probe entangled with much shorter polybutadiene
(PB) matrix chains [116].
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1355
Fig. 38. Dependence of normalized storage modulus M2 G 02;B =c2 RT of dilute high-M probes in binary PS/PS blends [68–71,75]
on the reduced frequency v kt 2,Glw, where c2 is the probe concentration in mass/volume unit and R is the gas constant. The data
are shown for the probes entangled only with much shorter matrix chains. For comparison, the modulus is shown also for a
dilute PI probe in a much shorter PB matrix [116]. The dashed curve indicates the prediction of the Rouse-CR model. Reprinted
with permission from Macromolecules 1994;27:3525. q 1994 American Chemical Society [116].
Fig. 38 clearly demonstrates that the data for various probes are collapsed into a universal curve. Thus,
for the probes satisfying the criterion M2 Me2 =M13 $ 0:5; the terminal relaxation intensity scales as c2/M2
and the relaxation mode distribution normalized by this intensity is universal (independent of M1 and
M2).
This universality experimentally ensures the CR dominance for the relaxation of those probes with
M2 Me2 =M13 $ 0:5: Thus, the kt 2,Glw experimentally determined in this universal regime gives the (secondmoment) CR relaxation time t CR,G. Eq. (197), describing those kt 2,Glw data, agrees with the prediction of
the classical Rouse-type CR models (Eq. (104)). Note that the power-law dependencies of kt 2,Glw on M1
and M2, that agree with this prediction, are observed only in a narrow range of M1, 2M2 Me2 1=3 $ M1 $
Mc :
Some comments need to be added for this agreement. As explained in Section 3.5.2, the combination
of Klein’s conjecture (about the multiple chain effect for the entanglement) and CLF leads to a different
expression of CR time, Eq. (109). However, for the kt 2,Glw data shown in Fig. 37, Me / y 21
pol was
increased only by a factor of 0.6 21, and the difference between the Me23 and Me23:4 dependencies (Eqs.
(104) and (109)) is not well distinguished. Similarly, the small difference between the M13 and M12:9
dependencies is not well resolved. Thus, Eqs. (109) and (104) are compatible with the data to a similar
extent.
Montfort et al. [79] and Roovers [84] reported t CR,G to be proportional to M21:9^0:1 and M22:2 ; respectively. These M2 dependencies are close to that in Eq. (197). However, a controversial difference exists
in the M1 dependence. This difference is partly attributable to experimental conditions, as explained
below.
1356
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
For PS/PS melt blends containing a probe with M2 2700 × 103 and y 2 0:02; Montfort et al. [79]
evaluated an average relaxation time t from a peak in the Cole–Cole plot of the dynamic viscosity,
applied Eq. (152) (harmonic average expression) to this t to evaluate t CR,G, concluded a relationship
tCR;G / M12:3^0:1 ; and explained this M1 dependence from the multiple constraints idea (see Section
3.5.2). They did not examine the probe mode distribution, and their results include the following
problems.
First of all, their probe with y 2 0:02 is not in the dilute regime; y 2 . y c Mc0 =M2 0:012: They
just utilized a model to claim that t for v2 0:02 is very close to t at infinite dilution, without examining
the t data for smaller y 2 [79]. However, for a very similar PS probe M2 2810 × 103 in melt blends,
the data for y 2 0:005 2 0:05 do indicate that kt 2,Glw J2;B h2;B increases with y 2 . y c and that this
increase is enhanced for smaller M1 to weaken the M1 dependence of kt 2,Glw at y 2 . y c ; see Figs. 29 and
30. Furthermore, t is not well defined in terms of the probe relaxation spectrum H~ 2;B and is not an
appropriate quantity for detailed analyses (as pointed out also by Roovers [84]). Finally, Eq. (152) used
in the evaluation of t CR,G is based on an inadequate assumption of independence of reptation and CR (the
assumption of configuration independent CR; see Sections 3.7.3 and 4.4.4). The M12:3^0:1 dependence,
considerably weaker than that given by Eq. (197), is attributable to these problems. (In addition, the
multiple constraints considered by Montfort et al. [79] are not important in the PS/PS blends examined;
see Section 3.5.2.)
Roovers [84] examined the M1 dependence of t CR,G for 4-arm star PB probes with Ma 341 × 103
and 94 × 103 in linear PB matrices (y 2 0:0125 and 0.25 for both probes). He evaluated a relaxation
time t 0 from a frequency v 90 where the dynamic compliance of the blend J 0B v90 reaches a specific
level, 90% of the recoverable compliance J 0B 0: He utilized this t 0 as t CR,G and reported a power-law
dependence tCR;G / M12:6^0:2 : The largest exponent in his result, 2.8, appears to be compatible also
with the PS data (Fig. 37) within experimental uncertainties. Nevertheless, we note some questionable
points in Roovers’ results: Some y 2 dependence remained in the t 0 data [84] that were utilized to
obtain the above dependence, i.e. his probe was not sufficiently dilute: Specifically the criterion for the
dilute solution-like behavior found for 4-arm PS stars [77], y 2 , y cS Mc0 = gM2 with g 0:625; was
not satisfied for his probe with Ma 341 × 103 (for which y cS ù 0:007). In addition, the M12:6^0:2
dependence was deduced by use of all data points in a wide range of the extended Struglinski–
Graessley parameter, 1 . 2Ma Me2 =M13 $ 0:003: It is not clear if the star PB probe relaxation is
dominated by the CR mechanism in such a wide range. (For the dilute star PS probes, this CRdominance (guaranteed by the universal mode distribution [76]; cf. Fig. 35) is observed only for
2Ma Me2 =M13 $ 0:15:)
The above arguments for the M1 dependence of t CR,G just concern a relatively minor issue, the M1
dependence of the entanglement lifetime tw (Eq. (103)). We have not discussed a more important
problem, how the tube moves for a given tw, i.e. the fundamental CR dynamics. The models in Section
3.5 assume the Rouse motion of the tube having the local friction / tw. The M22 dependence of t CR,G
R
(Eqs. (197) and (198)) as well as the J2;B
values in the CR-dominant regime (Fig. 36) are consistent with
this Rouse-CR picture.
In Fig. 38, the dashed curve indicates the normalized modulus calculated from the Rouse-CR model.
(A small polydispersity of the probes Mw =Mn , 1:1 is considered in this calculation [75].) The data are
very close to this curve at low vkt2;G lw , 10: This result is again consistent with the Rouse-CR picture.
However, we should not jump into a conclusion that the actual CR process is very well described by
the Rouse dynamics. The data in Fig. 38 systematically deviate upward from the Rouse-CR curve on an
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1357
Fig. 39. Comparison of viscoelastic [69,70] and diffusion [26,27] times, kt 2,Glw and t dif, for dilute probes in binary PS/PS melt
blends at 1678C. The data are shown for the blends satisfying 2M2 Me2 1=3 $ M1 . Mc0 : The dashed line indicates a relationship
between kt 2,Glw and t dif expected for the Rouse-CR process. Reprinted with permission from Macromolecules 1987;20:530.
q 1987 American Chemical Society [72].
increase of vkt2;G lw . 10: This result means that the Rouse dynamics overestimates the fast relaxation
to predict smaller modulus compared to the experiments.
This difference between the Rouse-CR and actual CR processes can be also noted from comparison of
viscoelastic and diffusion quantities in the CR-dominant regime. Green et al. [26,27] examined tracer
diffusion in linear PS/PS entangling melt blends. They found that the tracer diffusion coefficient of dilute
probes, Dtr, first decreases and then levels off with increasing matrix molecular weight M1. This decrease
indicates a decrease of the CR contribution to the tracer diffusion.
Green et al. reported an empirical equation for Dtr at 1748C [26,27]. Reducing their equation to 1678C
by use of their Vogel equation [192], we obtain [72]
Dtr =cm2 s21 3:7 × 1023 M222 1 1:58 × 107 M123 M221
at 1678C
199
(Although Green and Kramer [27] reported that the Dtr data are well described also by an equation
having the M122:8 dependence (and a different numerical prefactor) in the second term of Eq. (199), no
significant numerical difference is found for the Dtr values calculated from the new and original
equations, the latter reduced to Eq. (199) at 1678C.)
From Eq. (199), we can define a characteristic tracer diffusion time [72]
tdif kR2e lDtr 21 ;
kR2e l=cm2 52:8 × 10218 M2
200
Here, kR2e l is the mean-square end-to-end distance of the probe (in the u state). For the linear probe PS
chains in melt PS matrices [69,70] that were confirmed to be sufficiently dilute (h2;B / y 2 and
2
3
J2;B / y 21
2 ) and in the CR-dominant regime M2 Me =M1 $ 0:5; t dif was evaluated from Eq. (200)
and compared with the viscoelastic kt 2,Glw data at 1678C [72]. The results are shown in Fig. 39,
where the dashed line indicates the prediction of the Rouse-CR model
kt2;G lw 1=90tdif
201
The kt 2,Glw and t dif are proportional to each other but the kt2;G lw =tdif ratio is ù 4 times larger than that
1358
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
0
3
Fig. 40. Comparison of y 21
2 G 2;B data of the dilute probe (M2 1810 × 10 ; y 2 0:015) in PS/PS plasticized blends y pol 0:6
with predictions of the CICR model (dashed curves; Eq. (150)) and CDCR model (solid curves; Eq. (164)). The numbers indicate
1023 M1 of the matrices. Reprinted with permission from Macromolecules 1991;24:5573. q 1991 American Chemical Society [75].
predicted from Eq. (201). This difference appears to be larger than the uncertainties in the kt 2,Glw data
and evaluation of t dif, again indicating a difference between the Rouse-CR and actual CR processes.
This difference becomes even clearer when we examine the dielectric properties of the dilute probes in
the CR-dominant regime. The origin of this non-Rouse nature of the actual CR-process is discussed for
those data later in Sections 5.3 and 5.4.
4.4.4. Comparison with CICR and CDCR models
As explained in the previous section, the CR mechanism dominates the relaxation of the dilute probes
only in a narrow range of the matrix molecular weight, 2M2 Me2 1=3 $ M1 $ Mc : For M1 . 2M2 Me2 1=3 ;
contributions from other competing mechanisms becomes important. Within the generalized tube
model, reptation and contour length fluctuation (CLF) compete with CR.
As explained in Section 3.7.3, the competition of Rouse-CR and reptation is formulated differently in
the configuration-independent and configuration-dependent CR (CICR and CDCR) models, the former
resulting in the product form of the normalized relaxation modulus m (Eqs. (149) and (150)) while the
latter not predicting this form but suggesting changes in the eigenvalue problem on this competition (Eq.
(161)). We here compare predictions of these models with the viscoelastic data for dilute probes to
examine the configuration dependence of the actual CR process. All parameters, common for the CICR
and CDCR models, were determined independently from the plateau modulus GN and characteristic
viscosity h c (at Mc) of monodisperse systems and the storage modulus G 02;B of dilute probes in the CRdominant regime (where the two models reduce to the Rouse-CR model) [75]. Thus the following
comparison includes no adjustable parameter.
0
In Fig. 40, the data and model predictions are compared for the reduced modulus y 21
2 G 2;B of dilute
probe M2 1810 × 103 in PS/PS plasticized blends y pol 0:6 [75]. In Figs. 41 and 42, respectively,
R
( c2RTJ2,B/M2) of dilute PS probe of
the comparison is made for kt 2,Glw and reduced compliance J2;B
various M2 [69–71,75]. In both Figs. 41 and 42, the data for melt blends [69,70] and plasticized blends
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1359
Fig. 41. Comparison of kt 2,Glw data of dilute high-M probes in PS/PS binary blends with the predictions of the CICR model
(dashed curves; Eq. (152)) and CDCR model (solid curves; Eq. (163)). The numbers indicate 1023 M2 of the probes. The squares
indicate the data for melt blends [69,70] and the circles, for plasticized blends with y pol 0:6 [71,75]. The data at an isofrictional state f r 0:0644 are plotted against the M1/Me ratio of the matrix. (Data taken from Refs. [69–71,75].)
y pol 0:6 [71,75], reduced at an iso-frictional state and plotted against M1/Me, are shown with squares
and circles, respectively. (Note in Fig. 41 that the kt 2,Glw data for 1023 M2 2810 coincide in the melt
and plasticized blends. This result corresponds to the (M1/Me) 3 dependence of kt 2,Glw in the CR-dominant regime; Eq. (197).)
In Figs. 40–42, the predictions of the CICR and CDCR models are shown with the dashed and solid
curves, respectively. (A small polydispersity of the probes is considered in the calculation [75].) The
terminal mode distribution of the probe becomes narrower and the terminal intensity becomes larger
0
R
with increasing M1, as noted from the changes in the shape of the y 21
2 G 2;B curve and decreases of J2;B
with M1 (Figs. 40 and 42). The CDCR model reasonably well describes this behavior, while the changes
predicted from the CICR models are too gradual compared to the data. The kt 2,Glw data rapidly increases
(in proportion to (M1/Me) 3) only in a narrow range of M1 =Me # 2M2 =Me 1=3 ; and a gradual increase is
observed for M1 =Me . 2M2 =Me 1=3 (Fig. 41). The CDCR model again mimics this behavior reasonably
well, but the kt 2,Glw calculated from the CICR models increases too rapidly and then levels off too
suddenly with increasing M1/Me.
The above results strongly suggest that the relaxation rate of the actual CR process is dependent on the
probe configuration. This configuration dependence is also demonstrated for the dielectric data later in
Sections 5.2 and 5.3. These results pose a serious conceptual question about the factorized modulus
1360
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
R
Fig. 42. Comparison of reduced compliance J2;B
data of dilute high-M probes in PS/PS binary blends with the predictions of the
CICR model (dashed curves; Eq. (150)) and CDCR model (solid curves; Eq. (164)). The numbers indicate 1023 M2 of the
probes. The squares indicate the data for melt blends [69] and the circles, for plasticized blends with y pol 0:6 [71,75]. The
data at an iso-frictional state f r 0:0644 are plotted against the M1/Me ratio of the matrix. (Data taken from Refs. [69,71,75].)
m mCR mrep (Eqs. (149) and (150)) resulting from the assumption of independence of CR and reptation
(assumption of CICR), although the use of a similarly factorized m may be a practically harmless
approximation for blends with y 2 M2 q Mc0 (as explained for Fig. 33).
Here, a comment needs to be made also for the reasonable success of the CDCR model. For the
viscoelastic quantities, this model was formulated by combining the reptation eigenmodes with a subset
of Rouse-CR eigenmodes (diagonal modes; see Section 3.7.3.3). The use of only this subset is an
approximation that underestimates the fast viscoelastic CR relaxation compared to the rigorous
Rouse-CR dynamics [143]. This dynamics in turn overestimates the fast relaxation compared to the
actual CR dynamics, as explained for Fig. 38. Thus the reasonable success of the CDCR model is
attributable to a sort of cancellation between these under- and overestimation [75,143]. In fact, a
limitation of the CDCR model utilizing all Rouse-CR eigenmodes is later observed for dielectric
quantity for which the model rigorously combines these eigenmodes with the reptation eigenmodes
(see Section 3.7.3.3). Thus the success of the CDCR model should not be interpreted as an evidence of
the validity of the generalized tube model incorporating the Rouse-CR dynamics, although the comparison of the CDCR and CICR models with the data certainly demonstrates the configuration dependence
of the actual CR process and the failure of the independence assumption for m .
4.4.5. CR contribution to viscoelastic relaxation of monodisperse systems
The t CR,G data for the binary blends can be utilized for examination of the CR contribution to
viscoelastic relaxation in monodisperse systems. For linear PS chains, the time t CR required for the
global CR relaxation in these systems with the molecular weight M is simply estimated from the
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1361
empirical equation (197) with M1 and M2 being replaced by M. In principle, we can similarly estimate
t CR in monodisperse star PS systems. However, an empirical equation for star/star blends necessary for
this estimation is not available. Thus we estimate t CR in the monodisperse 4-arm star PS systems in the
following way [78].
For the CR relaxation of the dilute star probe, the matrix chains simply determine the local tube
friction ztube / tw (entanglement lifetime). The dependence of t CR,G on the star probe molecular weight
M2S is determined by the probe itself, irrespective of the topological structure of the matrix chains (star
and/or linear). Thus, as similar to Eq. (198) for the star probe in linear matrices, t CR,G of the star probe in
2
and written as
the star matrices should be proportional to M2S
2
tCR;G {star probe} Kstar M2S
tw {S-mat}
202
where Kstar is a constant, and tw{S-mat} is the entanglement lifetime in the star matrix.
Utilizing the entanglement lifetime in an arbitrarily chosen linear matrix tw{L-mat}, we can re-write
Eq. (202) as
tw {S-mat}
2
tCR;G {star probe} Kstar M2S tw {L-mat} ×
tw {L-mat}
tw {S-mat}
213 3
2
23
ù 1:4 × 10 M1L M2S Me ×
203
fr 0:0644
tw {L-mat}
2
tw {L-mat} in the first part of Eq. (203) is the CR relaxation time of the star probe in
The term Kstar M2S
the chosen linear matrix having the molecular weight M1L. Thus, in the second part, this term is replaced
by the empirical equation for this CR time (Eq. (198); for the plasticized star/linear blends with
y pol 0:6). We can estimate t CR,G{star probe} from Eq. (203) if we find an equivalent linear matrix
whose tw{L-mat} is identical to tw{S-mat} of the given star matrix. Furthermore, if we choose the star
probe to be identical to the star matrix, the t CR,G{star probe} thus estimated gives the CR time in the
monodisperse system of the matrix star chains.
For 4-arm star PS matrices with molecular weights 1023 M1S 135; 307, and 684, Watanabe et al.
[78] looked for the equivalent linear matrices explained above. For this purpose, they examined the
viscoelastic behavior of dilute, high-M linear probe (M2 2810 × 103 ; y 2 0:01) in these matrices
(plasticized to y pol 0:6) and determined kt 2,Glw of this probe. The kt 2,Glw thus obtained are plotted
against M1S/Me in Fig. 43 (circles) [78]. For comparison, kt 2,Glw of the same probe in linear PS matrices
of molecular weights M1L (y pol 0:6; cf. Fig. 37) are plotted against M1L/Me (triangles). Since the highM linear probe should have the same kt 2,Glw in the star and linear matrices having the same tw, the data
shown in Fig. 43 allow us to determine M1L of the equivalent linear matrices with their tw{L-mat} being
identical to tw{S-mat} of respective star matrices [78]. The resulting M1L values were utilized in Eq.
(203) to evaluate t CR,G in the monodisperse systems of the matrix star PS chains [78].
The t CR,G thus evaluated for the monodisperse star PS systems are shown in Fig. 44 together with the
t CR,G in monodisperse linear PS systems (Eq. (197) with M1 M2 M) [78]. For comparison, the
observed terminal relaxation time of these systems, kt Glw ( Jeh 0), are also shown (circles). These data
are plotted against M/Me (for linear chains) and/or 2Ma/Me (for star chains).
For the monodisperse star systems (Fig. 44b), the observed kt Glw is close to t CR,G up to Ma =Me ù 6:
This result suggests that the star arms with Ma =Me # 6 fully relax via their CR motion before they retract
significantly in the dilated tube. No data are available for Ma =Me . 6: However, we cannot rule out a
1362
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
Fig. 43. Comparison of kt 2,Glw data of the dilute, linear PS probe (M2 2810 × 103 ; y 2 0:01) in linear and star PS matrices
(triangles and circles). The square indicates kt Glw of the monodisperse system of the probe. The data for plasticized systems
y pol 0:6 at an iso-frictional state f r 0:0644 are shown. Reprinted with permission from Macromolecules 1992;25:2442.
q 1992 American Chemical Society [78].
possibility that star chains with considerably large Ma/Me ratios still have tCR;G ù ktG lw and their
terminal relaxation is largely contributed from the global CR motion. In other words, the tube dilation
limit (where tCR;G q ktG lw and this contribution is safely neglected) might be realized only for very
large Ma/Me ratios. From this point of view, the current model of the star tube dilation (Section 3.6.2.2),
that just assumes rapid equilibration of the entanglement segments in the dilated tube (via fast, local CR
processes), may need to be further refined by explicitly incorporating the CR motion of the arm (in
various spatial scales) in the calculation of G(t).
Now we turn our attention to monodisperse linear chains (Fig. 44a). The observed kt Glw is smaller
than t CR,G (i.e. the actual terminal relaxation is faster than the global CR relaxation) and the difference
between kt Glw and t CR,G increases with increasing M. (On the other hand, the observed kt Glw is close to
t CR,G at M ù M e : This result is consistent with Klein’s argument [138] for the onset of entanglement.)
The large difference of kt Glw and t CR,G for high-M linear chains roughly means that the tube motion is
not very important for the terminal relaxation of these chains. However, the t CR,G/kt Glw ratio is only as
large as 100 for M ù 30M e ; suggesting non-negligible CR contribution to the relaxation of considerably
well entangled linear chains [70,78].
Concerning this point, we should note that the comparison in Fig. 44 is made for the terminal times of
the CR and actual relaxation processes. Since the CR process has a broad (Rouse-like) mode distribution,
fast CR modes should have considerable contribution to the actual terminal relaxation of the probe. This
suggests the importance of the fast CR process (and of the corresponding tube dilation), as explained
earlier in Section 4.1.
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1363
Fig. 44. Comparison of the observed terminal relaxation time kt Glw of monodisperse (a) linear and (b) star PS systems with the
CR time t CR,G evaluated from blend data. All systems are plasticized to have y pol 0:6: The data at an iso-frictional state
f r 0:0644 are plotted against (a) M/Me for linear PS and (b) 2Ma/Me for star PS (Ma arm molecular weight). Reprinted
with permission from Macromolecules 1992;25:2442. q 1992 American Chemical Society [78].
5. Dielectric behavior
After the finding by Adachi and Kotaka [94] that cis-polyisoprene (PI) has the type-A dipoles [175]
parallel to the chain backbone, extensive dielectric studies have been conducted for PI chains in monodisperse bulk state as well as in solutions and blends [94–122]. Because of these dipoles, the global chain
motion induces slow dielectric relaxation. (The weak interaction among the small dipoles of PI chains
negligibly affects this motion.)
The global chain motion also induces slow viscoelastic relaxation. However, an important difference
exists between the dielectric and viscoelastic properties: the former reflects orientational correlation of
two submolecules at different times while the latter detects isochronal orientational anisotropy of
respective submolecules; see Section 2. Thus the same motion is differently reflected in the dielectric
and viscoelastic properties. This difference in turn enables us to investigate detailed features of the chain
dynamics from comparison of these quantities. In addition, the type-A dipoles can be once-inverted at a
desired portion of the chain backbone, thereby allowing us to investigate further details of the chain
dynamics [112,115–117].
Thus the dielectric studies of PI chains have been significantly contributing to recent progresses in our
understanding of the polymer dynamics. This section summarizes the results of those studies and
discusses the remaining problems.
1364
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
5.1. General
Dielectric properties of type-A chains in long time scales are determined by the local correlation
function C(n,t;n 0 ) that represents the orientational correlation of the n-th and n 0 -th submolecules in
respective chains at two separate times (Eq. (24)). For monodisperse linear chains composed of N
submolecules (entanglement segments), we summarize here how the detailed features of C(n,t;n 0 ) are
included in the measured dielectric properties. (A similar summary can be made also for star chain.)
In general, C(n,t;n 0 ) of the linear chains can be expanded with respect to its eigenmodes [115]
N
2 X
t
C n; t; n
fp nfp n 0 exp 2
te;p
N p1
!
0
204
Here, fp(n) and te;p are the p-th eigenfunction and relaxation time of C. The two ends of the chain are
equivalent and fp(n) should be either symmetrical or anti-symmetrical with respect to the chain center
[115]. We define the symmetrical and anti-symmetrical eigenfunctions as the odd and even eigenfunctions, fp n fp N 2 n for p odd and fp n 2fp N 2 n for p even.
For the chain having the type-A dipoles once inverted at the n p-th submolecule (cf. Fig. 3), Eqs. (23)
and (25) indicate that the dielectric relaxation function F (t) and the complex dielectric constant ep v
(v angular frequency) are determined by C(n,t;n 0 ), i.e. by fp(n) and te;p ; as well as by the inversion
parameter q n; q 1 for 0 , n , np and q 21 for np , n , N: The te;p is included in F (t) and
ep v as the p-th dielectric relaxation time (Eqs. (27) and (28)). The fp and q determine the normalized
dielectric mode intensity gp as [115] (cf. Eqs. (23), (27) and (204)
" p
#2
ZN
2 Zn
fp n dn 2
fp n dn
gp n 2
N
np
0
p
205
Here, the n p dependence of gp is explicitly shown.
For the chains having no inversion of the dipoles np =N 0; Eq. (205) indicates that gp 0 for
p even. The ep v of these chains has contributions only from odd eigenmodes of C(n,t;n 0 ). Similarly,
for the chains having symmetrical dipole inversion np =N 0:5; only even eigenmodes contribute to
ep v: More generally, Eq. (205) indicates that the dielectric mode intensity gp(n p) is tuned by the
location of the dipole inversion point n p even if fp is the same. This feature is utilized to experimentally
determine fp from the gp(n p) data of dipole-inverted chains, as explained later in Section 5.3.
Additional comments need to be made for cis-polyisoprenes (PI), the type-A chains examined in this
section. The PI chains have not only type-A dipoles but also type-B dipoles, the latter being perpendicular to the backbone [102]. Thus the local motion of the PI chains (in scales of monomeric segments)
induces the fast dielectric relaxation often referred to as the a dispersion [99,102,108,109]. This local
relaxation process, that has a larger activation energy than the global relaxation process at low T ,08C
[108,109] and is intimately related to the glass transition, offers an interesting research field for the local
cooperative dynamics in dense systems [193]. However, this process is out of the scope of this article
examining the global, entanglement dynamics. Thus we limit ourselves to low v where the local process
has negligible contributions to the dielectric properties. (All data shown below were obtained in this lowv regime).
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1365
Fig. 45. Dielectric relaxation behavior of bulk, monodisperse linear PI without dipole inversion at 408C. The solid and dashed
arrows in part (c) indicate 1=kte lw and 1=kte ln ; respectively. (Data taken from Refs. [111,183].)
5.2. Monodisperse systems
5.2.1. Linear PI chains without dipole inversion
5.2.1.1. Overview Monodisperse linear PI synthesized via standard anionic polymerization in nonpolar solvents (e.g. heptane) has the type-A dipoles aligned along the chain backbone from one end to
the other (without inversion). Dielectric relaxation of such PI chains corresponds to fluctuation of their
end-to-end vectors, and only odd eigenmodes of C(n,t;n 0 ) contribute to e p of those chains (cf. Eq. (205)).
Fig. 45 shows typical relaxation behavior of such PI chains in the bulk state. (For convenience of the
analysis explained below, we chose representative PI systems [111,183] for which both e 0 and e 00 data
are available.) The Me of bulk PI evaluated from the GN data is ù 5 × 103 ; and the PI chains examined in
Fig. 45 have M=Me 2–19:
In Fig. 45, the relaxation is clearly observed as the peak of e 00 as well as the decrease of the difference,
0
e 2 e0 (e 0 static dielectric constant). The e 00 peak is immediately followed by the terminal tail
e 00 / v at v lower than the peak frequency v peak. Correspondingly, e0 2 e 0 becomes proportional
to v 2 at v well below v peak; see the double-logarithmic plots in part b. These results, naturally deduced
1366
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
Fig. 46. Comparison of dielectric mode distribution of the linear PI systems examined in Fig. 45. The symbols are the same as in
Fig. 45. For the clearest comparison, the e0 2 e 0 and e 00 data are reduced by the relaxation intensity De and the loss peak height
e 00peak ; respectively, and plotted against a reduced frequency v /v peak (vpeak e 00 peak frequency). The solid curve in part (b)
indicates the prediction of the reptation model.
from the linear relaxation framework (Section 2.3.3), are similar to those observed for G 0 and G 00 . The
terminal zone characterized by these tails shifts to the lower v side with increasing M, demonstrating
that the dielectric relaxation seen here reflects the global chain motion.
5.2.1.2. Mode distribution Fig. 46 compares the dielectric mode distribution of the linear PI systems
examined in Fig. 45. For the clearest comparison, the e0 2 e 0 and e 00 data are reduced by the relaxation
intensity for the global chain motion De and the loss peak height e 00peak ; respectively, and plotted against a
reduced frequency v /v peak. We note that the mode distribution is insensitive to M ( $ 2Me). In fact, this
insensitivity is observed also in the non-entangled regime M , 2Me at low v where the local (segmental) relaxation has little contribution to e p [116]. Thus the dielectric feature is different from the
viscoelastic feature: the viscoelastic mode distribution is significantly broader for non-entangled chains
than for entangled chains (as characterized by the compliance) [1,2].
The M-insensitive dielectric mode distribution is narrower than the viscoelastic mode distribution
even in the well entangled regime (as shown later in Fig. 58) but broader than the reptation prediction
(Eq. (28) with Eqs. (69) and (70)); solid curve in Fig. 46b). The origin of this difference between the data
and model prediction is later discussed in relation to the blend data.
Here, a few comments should be made for an earlier confusion for the dielectric mode distribution.
Adachi and Kotaka [95] first concluded that the distribution becomes broader with increasing M.
However, later, Imanishi et al. [99] showed that the broadening was due to the polydispersity of the
samples utilized in the early study [95]. For monodisperse PI systems, Imanishi et al. [99] claimed a
slight broadening of fast dielectric mode distribution with increasing M after subtraction of a contribution of the a dispersion (segmental relaxation) from the e 00 data. However, the claimed broadening (if
any) is noted only at v . 100vpeak and is comparable, in magnitude, with uncertainties in the subtraction
even at higher v ù 104 vpeak ; as pointed out by Watanabe et al. [113]. Instead of making such an
uncertain subtraction at high v (on the basis of an artificial fitting for a tail of the a dispersion), we
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1367
can just limit ourselves at relatively low v (where the dominant part of the global relaxation is observed)
and faithfully see what the data tell us. The data shown in Fig. 46 certainly indicate the M-insensitivity of
the dielectric mode distribution of monodisperse PI chains without dipole inversion.
5.2.1.3. Relaxation time In the range of v examined in Fig. 45, the low-v tails (e0 2 e 0 / v2 and
e 00 / v) are observed for the PI chains (except for the highest-M chain). The second- and first-moment
dielectric relaxation times, kte lw and kte ln (Eqs. (29) and (30)), were evaluated from these tails. The
kte lw =kte ln ratio, a measure of the terminal dielectric mode distribution, is ù 1.7 for the three samples.
This ratio is smaller than the viscoelastic ratio, ktG lw =ktG ln Je GN (cf. Eq. (191)), again indicating that
the mode distribution is narrower for the dielectric relaxation than for the viscoelastic relaxation.
In Fig. 45c, the characteristic frequencies 1=kte lw and 1=kte ln are shown with the solid and dashed
arrows, respectively. The 1=kte lw coincides well with the peak frequency vpeak : In addition, the e 00 data at
v # vpeak are well described by the single-relaxation (Debye) function that is very close to the reptation
function at those v ; cf. Fig. 46b. These result indicate that the e 00 peak of the monodisperse linear PI
corresponds to the slowest dielectric mode. Under absence of the dipole inversion, this mode corresponds to the slowest eigenmode p 1 of the local correlation function C n; t; n 0 ; see Section 5.1.
Thus we note a relationship
te;peak ù kte lw ù te;1
for np =N 0
206
This relationship (confirmed also for PI chains examined by Imanishi et al. [99]) allows us to safely
utilize literature data for te;peak as te;1 : In Fig. 47, the te;peak data reported for monodisperse bulk PI
[99,100,183] np =N 0 are reduced at an iso-frictional state (Tr 408C for M . 9 × 103 ) and plotted
against M (unfilled symbols). To avoid some confusion, earlier data [94,95] for polydisperse PI (for
which Eq. (206) is not valid) are not included in the plots.
In Fig. 47, the filled circles indicate the viscoelastic relaxation time t G determined by Adachi et al.
[100]. The t G for low M materials M # 104 were determined from the viscosity data through the
Rouse relationship (Eqs. (41) and (44)) and are expected to be close to the longest viscoelastic tG;1 : On
the other hand, thet G for high-M materials M $ 105 were determined from the G 00 peak frequency and
should be somewhat smaller than tG;1 : Considering these points, we note from the data shown in Fig. 47
that the longest te;1 is close to tG;1 for M . 105 M=Me $ 20 while te;1 is longer than tG;1 by a factor of
2–3 for M , 104 M=Me , 2: These results confirm that the dielectric and viscoelastic relaxation
processes detect the same global chain motion.
In the entangled regime, the dielectric te;1 of monodisperse linear PI is proportional to M 3.5; see
Fig. 47. The corresponding dielectric mode distribution is characterized with a power-law relationship,
e 00 / v2b with b ù 1=4 (see Fig. 46b). From these results, one may tend to conclude that the global
motion of the PI chains is described by the generalized tube model that incorporates reptation and
contour length fluctuation in the fixed tube and reproduces these features (Section 3.4). However, this
model does not consistently describe the dielectric and viscoelastic behavior, as shown later in Fig. 58.
This point is further discussed later in Section 5.4.
5.2.2. Linear PI chains with symmetrical dipole inversion
Monodisperse linear PI having once-inverted type-A dipoles are synthesized via coupling of living PI
anions polymerized in non-polar solvents [112,115]. Addition of a prescribed amount of a bifunctional
coupler to monodisperse living PI anions allows us to obtain the PI chains with symmetrical dipole
1368
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
Fig. 47. M dependence of the terminal dielectric relaxation time of bulk, monodisperse linear PI without dipole inversion.
Triangles, circles, and squares indicate the data reported by Imanishi et al. [99], Adachi et al. [100], and Matsumiya et al. [183].
The filled circles indicate the viscoelastic relaxation time [100]. All data are compared at an iso-friction state (Tr 408C for
M . 9 × 103 ). (Data taken from Refs. [99,100,183].)
inversion np =N 0:5 [112]. On the other hand, the coupling of a living PI anion and an end-chlorinated
PI of different M (two-step coupling method) gives the PI chains with asymmetrically inverted dipoles
0 , np =N , 1=2 [115]. We summarize here the dielectric behavior of the monodisperse PI chains with
symmetrical dipole inversion. The behavior of the chains with asymmetrical inversion is later explained
in Section 5.3.
Fig. 48 compares the e 00 curves of two monodisperse linear PI with almost identical molecular weights
(1023 M 48:8 and 47.7) [115]. The former has no inversion of the dipole np =N 0 while the latter
has the symmetrical inversion np =N 0:5: Only odd eigenmodes of C n; t; n 0 contribute to e 00 of the
former, while only even eigenmodes, to e 00 of the latter.
In Fig. 48, the curve for the PI chain with np =N 0 is shifted along the v axis by a factor aM
48:8=47:73:5 1:083; a correction factor for a small difference of te;1 of the two PI chains, (te;1 / M 3:5 ;
see Fig. 47). After this minor correction, we can regard the motion of the two PI chains to be exactly the
same. (Remember that these two chains have almost identical M.) The curve for np =N 0 is further
shifted by a factor DM to be superposed on the curve for np =N 0:5: For DM 3:9; excellent superposition is achieved, as indicated in Fig. 48. This result means that the dielectric mode distribution is
indistinguishable for the PI chains with np =N 0 and 0.5. Thus the peak relaxation time te;peak of the
latter PI is very close to its terminal dielectric relaxation time, as is the case for the former PI without
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1369
Fig. 48. Comparison of the e 00 curves at 408C for two monodisperse linear PI with almost identical molecular weights, 1023 M
48:8 and 47.7. The former has no inversion of the dipole np =N 0 while the latter has a symmetrical inversion np =N 0:5:
The curve for the former is shifted along the v axis by a factor aM 48:8=47:73:5 (a correction for the small difference of te;1 )
and further by a factor DM 3:9 te;1 =te;2 : Reprinted with permission from Macromolecules 1993;26:5073. q 1993
American Chemical Society [115].
dipole inversion. (Note that the ratio of the terminal time and the peak time te;peak is determined only by
the dielectric mode distribution.)
Since the e 00 of the PI with np =N 0:5 has contributions only from even eigenmodes of C n; t; n 0 ; its
te;peak coincides with te;2 of the second-slowest eigenmode. The two PI chains exhibit exactly the same
motion (after the minor correction explained above). Thus the te;1 =te;2 ratio of these chains is given by
the shift factor, DM 3:9:
Yoshida et al. [112] examined the dielectric behavior of monodisperse PI chains with np =N 0:5 in a
fairly wide range of M. These chains exhibit a narrow dielectric mode distribution (that agrees with the
distribution shown in Figs. 46 and 48) and their te;peak coincides with te;2 : In Fig. 49, these te;2 data at
408C are plotted against M (circles). The solid lines indicate the longest te;1 (data shown in Fig. 47), and
the dashed lines, 1=4te;1 : Clearly, the M dependence is the same for te;2 and te;1 but the magnitude is
smaller for te;2 by a factor ù 1/4. This result is in accord with the prediction of the reptation, Rouse-CR,
and CDCR models (all having te;p / p22 ; cf. Eqs. (45), (68), and (159)). However, these models
commonly predict the dielectric mode distribution (shown in Fig. 46 with solid curves) that is significantly narrower than the observed distribution. This failure of the models is further discussed later in
Section 5.3.
5.2.3. Star PI chains
Monodisperse star PI is usually synthesized via end-coupling of living PI arm anions with a multifunctional coupling agent. These star PI have the type-A dipoles that are aligned in the same direction in
each arm but are inverted at the branching (coupling) point. For such q-arm star PI, the dielectric
relaxation function is given by
Fstar t /
q
X
a;b1
kRa t·Rb 0l
207
1370
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
Fig. 49. M dependence of the terminal dielectric relaxation time of monodisperse linear PI with symmetrical dipole inversion
np =N 0:5: This time is very close to te;2 (relaxation time of the second-slowest eigenmode of the local correlation function).
The solid and dashed lines indicate the longest te;1 (data shown in Fig. 47) and te;1 =4; respectively. Reprinted with permission
from Macromolecules 1991;24:2981. q 1991 American Chemical Society [112].
where Ra t is the end-to-branching point vector of the a -th arm in the star chain. In principle, the
orientational correlation of all q arms contributes to F star. The contribution of the cross-correlation of
different arms vanishes if the branching point is fixed (as assumed in the arm retraction models; Sections
3.3 and 3.6).
Fig. 50 shows the dielectric relaxation behavior of monodisperse 6-arm star PI chains examined by
Yoshida et al. [111]. These chains have the span molecular weight 2Ma 1:4Me 2 8:2Me and are in the
lightly-to-moderately entangled state. The dielectric mode distribution of these chains are compared in
Fig. 51, where the e0 2 e 0 and e 00 data are reduced by De and e 00peak ; respectively, and plotted against
v=vpeak : The dashed curves indicates the e0 2 e 0 and e 00 data of linear PI (cf. Fig. 46).
In Fig. 50, the relaxation due to the global chain motion is noted for both e 0 2 e0 and e 00 , and the
terminal tails e0 2 e 0 / v2 ; e 00 / v are observed for respective star chains at sufficiently low v . From
these tails, the second- and first-moment relaxation times kte lw and kte ln (Eqs. (29) and (30)) were
evaluated. The corresponding frequencies, 1=kte lw and 1=kte ln ; are shown in Fig. 50c with the solid and
dashed arrows, respectively. The kte lw =kte ln ratio is ù 2 for the three PI stars. This ratio is a little larger
than that for the linear PI kte lw =kte ln ù 1:7; indicating a somewhat broader dielectric mode distribution
for the star chains examined. This difference between the star and linear chains is also noted in Fig. 51:
the terminal tails are observed at lower v=vpeak for the star PI (symbols) than for linear PI (dashed curve),
meaning that the star PI has weak but slow relaxation modes. (Yoshida et al. [111] also demonstrated this
difference from spectrum analyses.)
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1371
Fig. 50. Dielectric relaxation behavior of monodisperse 6-arm star PI at 408C. The solid and dashed arrows in part (c) indicate
1=kte lw and 1=kte ln ; respectively. Reprinted with permission from Polymer J 1989;21:863–72. q 1989 The Society of Polymer
Science, Japan [111].
In Fig. 50c, we note that v peak for the e 00 peak is close to 1=kte ln (dashed arrows). Thus, for the three-star PI
examined, the peak relaxation time te;peak is close to kte ln and shorter than kte lw ù te;1 by a factor ù 2.
In Fig. 52, these te;peak data obtained by Yoshida et al. [111] are plotted against the span molecular weight
2Ma (filled circles). The unfilled circles indicate the te;peak data reported by Boese et al. [107,109] for star PI
with various arm numbers q as indicated. (The data by Boese et al. [107,109] and Yoshida et al. [111], obtained
ina similar rangeof Ma,are reduced and compared at408C.) Thesolidlinesindicate the te;1 data forthe linearPI
(cf. Fig.47). The te;peak ofthe star PI chainsappear to hardly dependonq andexhibit the Ma dependence that is a
little stronger than the M 3.5 dependence of te;1 of the linear PI. These results are similar to those seen for the
viscoelastic relaxation times, and the highest-Ma PI star chains examined in Fig. 52 seem to be just at the
lower edge of the well-entangled regime where the exponentially retarded star relaxation is observed.
Concerning this point, we should add a few comments. In detailed examination of the chain dynamics,
we should compare the longest te;1 and/or the average relaxation time of the same moment (e.g. kte ln or
kte lw ) for the star and linear chains. The te;peak data by Yoshida et al. [111] are confirmed to be close to
kte ln : In contrast, for the te;peak data by Boese et al. [107,109], the relationships with kte ln or kte lw have
not been specified. (For this reason, Fig. 52 utilized the te;peak data for comparison of the star PI with
various q.) Thus the q dependence of the dielectric te ; not seen in Fig. 52, may be observed if we
compare the average relaxation time of the same moment. It is an interesting subject of future studies to
1372
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
Fig. 51. Comparison of dielectric mode distribution of the star PI systems examined in Fig. 50. The symbols are the same as in
Fig. 50. For the clearest comparison, the e0 2 e 0 and e 00 data are reduced by the relaxation intensity De and the loss peak height
e 00peak ; respectively, and plotted against a reduced frequency v /v peak (vpeak e 00 peak frequency). The dashed curves indicate
the behavior of linear PI (cf. Fig. 46).
measure e p of the stars in a higher-Ma regime (where the characteristic exponential retardation should be
observed) and examine the q dependence of kte ln ; kte lw ; and/or te;1 :
5.3. Blends
The PI chains exhibit a wide variety of dielectric relaxation behavior in blends. We here focus the
behavior of dilute PI chains (probe) in matrices of 1,4-polybutadiene (PB). The PI and PB are semicompatible and exhibit phase separation if their molecular weights M2 and M1 are large and the PI
volume fraction y 2 is around 0.5. However, for sufficiently small y 2 and relatively small M1 and M2 (that
are still large enough to form entanglements), the separation does not occur and the PI probes are
uniformly mixed/entangled with the PB matrix chains.
The reduced dielectric relaxation intensity for the global motion of these dilute PI probes, De=c2 with
c2 probe concentration in mass/volume unit, is identical to that of bulk PI [113,116]. Thus the meansquare end-to-end distance of the PI probes, R2e / M2 De=c2 (cf. Eq. (26)), is the same in their monodisperse bulk state and in blends, suggesting that the static properties of the probe is essentially the same
in these two systems. However, the dynamic properties are quite different.
In blends, the dynamic properties of the probe change significantly with the matrix molecular weight
M1. These changes are conveniently investigated through dielectric properties of the PI/PB blends: since
the matrix PB chains do not have the type-A dipoles, their motion induces no dielectric relaxation in long
time scales where the global motion of the PI probes is observed. This allows us to exclusively attribute
the dielectric signals of the blends in those time scales to the PI probe motion and analyze the signals on
the basis of the conformation–property relationship explained in Section 2.3.
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1373
Fig. 52. Ma dependence of te;peak of monodisperse star PI with various arm numbers q as indicated. The data by Yoshida et al.
[111] q 6 and Boese et al. [107,109] (q 8; 12, and 18) are reduced at 408C and plotted against the span molecular weight
2Ma. The solid lines indicate M dependence of te;1 of linear PI without dipole inversion (cf. Fig. 47). (Data taken from Refs.
[107,109,111].)
This section summarizes the dynamic properties of the PI probes thus observed dielectrically. Differing from the blends studied in Section 4.4, some blends examined below contain the dilute probes (PI)
shorter than the matrix chains (PB). However, we always regard the PI probe and PB matrix as
components 2 and 1 (irrespective of their molecular weights), so that the predictions of the CR models
(Sections 3.5 and 3.7.3) can be compared with the dielectric data without changing the definitions of the
model parameters.
5.3.1. Linear PI probes with np =N 0 and 0.5
5.3.1.1. Mode distribution Fig. 53 shows representative e 00 data of a dilute linear PI probe without
dipole inversion M2 48:8 × 103 ; y 2 0:05 in PB matrices of various M1 as indicated [118]. For the
clearest comparison of the dielectric mode distribution, the e 00 data are reduced by their peak values and
plotted against v=vpeak : As explained later in Section 5.3.1.3, the entanglement spacing of the dilute PI
probe in PB matrices is Me;2 ù 1:7 × 103 ; and the corresponding characteristic molecular weight of the
probe is Mc;2 ù 2Me;2 ù 3:4 × 103 [121,122]. The PI probe chains examined in Fig. 53 satisfy a criterion
y 2 M2 , Mc;2 and are not entangled among themselves (as similar to the situation for dilute PS probes
examined in Section 4.4). In fact, experiments indicated that the reduced dielectric loss of the PI probes,
1374
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
Fig. 53. Comparison of dielectric mode distribution of a dilute linear PI probe (M2 48:8 × 103 ; y 2 0:05) in PB matrices of
various M1 as indicated. For the clearest comparison, the e 00 data are reduced by their peak values and plotted against a reduced
frequency v /v peak. The solid curve indicates the data of the same probe in its monodisperse bulk state. Reprinted with
permission from Macromolecules 1996;29:755. q 1996 American Chemical Society [118].
e 00 v=y 2 ; is independent of y 2 for y 2 , Mc;2 =M2 ; confirming the lack of entanglements between the
probe chains [113].
The characteristic molecular weight for bulk PB is Mc0 ù 6 × 103 [1,2], and this Mc0 value should be
hardly affected by the dilute PI probe (with y 2 0:05). Thus, among the PB matrices examined in Fig.
53, the three matrices with M1 # 2:7 × 103 , Mc0 are in the non-entangled state, while the remaining
matrices M1 $ 9:24 × 103 . Mc0 are in the entangled state. Clearly, the probe exhibits the narrow and
broad dielectric mode distributions in the non-entangling and entangling matrices, respectively. (In
matrices of M1 ù Mc0 ; the probe exhibits an intermediate mode distribution [118].)
The narrow mode distribution in the low-M matrices is close to that expected for dilute solutions of the
probe (Zimm mode distribution) [117]. Eigenmode analyses of the e 00 data indicated that the probe
dynamics is indeed close to that in dilute solutions [117].
On the other hand, the broad mode distribution in the high-M entangling matrices agrees well with that
of monodisperse bulk PI systems (shown with the solid curve in Fig. 53). From this result, one may
attribute the broad mode distribution to the entanglement effect. However, this is not the case because
the same, broad distribution is observed for non-entangled, monodisperse PI chains in bulk state [116].
Instead, the broad mode distribution is attributable to some sort of dynamic coupling of the probe and
surrounding chains [118]. (Examination of the criterion for the mode broadening suggested that the
coupling is not the simplest viscoelastic coupling that is modeled as a single bead-spring chain in a
viscoelastic medium [118].) Further details of this broad mode distribution are discussed later in Section
5.3.2 in relation to the probe eigenfunctions.
5.3.1.2. Relaxation time For monodisperse bulk PI systems exhibiting the narrow dielectric mode
distribution (Fig. 46), the peak relaxation time te;peak is very close to the longest te;1 (cf. Eq. (206)).
Since the mode distribution of the dilute PI probes in the entangling PB matrices coincides with that of
the monodisperse bulk PI (cf. Fig. 53), these probes (without dipole inversion) also have te;1 ù te;peak : In
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1375
Fig. 54. Dependence of (a) te;1 and (b) te;2 =te;1 ratio of dilute PI probes in PB matrices on the matrix molecular weight M1. The
data are compared at an iso-frictional state (Tr 408C in high-M matrices with M1 . 9 × 103 ). In part (a), the filled triangles
connected with the dash-dot line shows viscoelastic kt Glw of PB matrices, and thick solid curves indicate te;1 predicted from the
CDCR and CICR models. In part (b), the filled square indicates the te;2 =te;1 ratio of the probe in its monodisperse bulk state, and
the solid and dotted curves indicates the predictions of the CDCR and CICR models, respectively. Reprinted with permission
from Macromolecules 1996;29:755. q 1996 American Chemical Society [118].
Fig. 54a, these te;1 data of the PI probes are plotted against the matrix PB molecular weight M1 (circles)
[118]. The small filled triangles connected by the dash-dot line indicates the viscoelastic ktG lw Je h0
of the pure PB matrices. All these data are compared in an iso-frictional state (Tr 408C for blends and
pure matrices with M1 . 9 × 103 ) [118].
Watanabe et al. [118] also examined the behavior of a dilute PI probe with symmetrical dipole
inversion M2 47:7 × 103 in various PB matrices and found that its mode distribution coincides
with the distribution of the probe without inversion M2 48:8 × 103 in respective matrices. (This
situation is very similar to that seen for bulk PI; cf., Fig. 48). Thus they evaluated te;2 of the dipoleinverted probe from v peak. The te;1 of this probe, not determined from its e p data (contributed only from
even eigenmodes; cf. Eq. (205)), was evaluated from te;1 of the probe without inversion after a minor
correction for the small difference in M2 of the two probes [118]. In Fig. 54b, the resulting te;2 =te;1 ratio
of the dipole-inverted PI probe is plotted against M1 (circles).
As seen in Fig. 54a, te;1 is independent of M1 for M1 , Mc0 (in the non-entangling matrices at the isofrictional state). In the entangling matrices, te;1 first increases and then levels off with increasing M1.
This behavior reflects changes in the constraint release (CR) contribution to the dielectric behavior of the
PI probe. The te;2 =te;1 ratio is close to 1/4 in the entire range of M1 and insensitive to this change of the
CR contribution; see Fig. 54b. It should be also emphasized that the dielectric mode distribution remains
the same on this change of the CR contribution; see the e 00 data in the entangling matrices shown in
Fig. 53 (unfilled symbols). This CR-insensitive mode distribution is noted also for PI/PI blends [101].
1376
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
These results demonstrate a difference in the CR effects on the dielectric and viscoelastic mode
distributions, the latter becoming significantly narrower on an increase of M1, i.e., on suppression of
CR (cf. Figs. 35, 40 and 42).
5.3.1.3. Hypothetical monodisperse state The dilute PI probe in a PB matrix behaves as if in a
monodisperse state when the matrix has a relaxation time identical to te;1 of the probe [118]. For the
dielectrically inert PB matrices, no te;1 data are available. However, the data for bulk PI (Fig. 47) suggest
that te;1 is close to the viscoelastic relaxation time for entangled monodisperse chains. Thus, the
hypothetical monodisperse state for the PI probe is realized in the PB matrix having the viscoelastic
ktG lw ù tG;1 identical to te;1 of the probe therein.
Following this idea, Watanabe et al. [118] compared the ktG lw and te;1 data (Fig. 54a) to evaluate the
matrix molecular weights M1p in the hypothetical monodisperse states for respective PI probes. It turned
out that M1p is very close to M2 of the probe. Furthermore, Watanabe et al. [122] utilized the mechanical
loss data of the PI probe in much longer PB matrix chains to estimate the entanglement spacing for the
dilute PI probe, Me;2 ù 1:7 × 103 : This Me;2 is close to the entanglement spacing in bulk PB systems,
Me0 ù 1:8 × 103 : This result is consistent with the coincidence of M2 (PI) and M1p (PB) in the hypothetical
monodisperse state.
5.3.1.4. Comparison with models The dielectric data of the PI probes in the entangling PB matrices
allow us to test the validity of the CDCR and CICR models explained in Section 3.7.3. For the local
correlation function C n; t; n 0 ; the CDCR model is rigorously formulated by combining all Rouse-CR
eigenmodes with the reptation eigenmodes. As noted from Eq. (159), the CDCR model predicts that the
longest te;1 is given by the harmonic average of the Rouse-CR and reptation times (tCR;e and t rep) and
that the functional form of C n; t; n 0 as well as the te;p =te;1 ratio p22 do not change with the CR
contribution. Thus the predicted dielectric mode distribution of the probe is independent of M1.
For the CICR model giving the factorized dielectric relaxation function F (t) (Eq. (153)), C n; t; n 0 is
written as FCR tCrep n; t; n 0 where F CR and Crep are the Rouse-CR relaxation function (Eq. (154)) and
the reptation correlation function (Eq. (68)), respectively; see Section 3.7.3.2. As noted from this C, the
CICR model also gives te;1 tCR;e 21 1 trep 21 21 (cf. Eq. (155)) but predicts that the te;p =te;1 ratio
and the corresponding the dielectric mode distribution of the probe change with M1. Specifically, the
predicted mode distribution becomes first broader and then narrower with increasing M1 [114].
The CDCR and CICR models have a common set of parameters. Watanabe et al. evaluated these
parameters from independent viscoelastic and dielectric experiments (in two extreme cases of Mc0 ,
M1 p M2 and M1 q M2 ) [114] and compared the model predictions with the dielectric data of the PI
probes [114,116]. In Fig. 54a, the predicted te;1 (common for the two models) are shown with the thick
solid curve. Reasonable agreement with the data is observed. In Fig. 54b, the te;2 =te;1 ratio predicted
from the CDCR and CICR models are shown with the solid and dashed curves, respectively. Clearly, the
CDCR model describes the data much better than the CICR model. In addition, the M1-insensitive
dielectric mode distribution of the probe in the entangling matrices (unfilled symbols in Fig. 53) is
consistent with the CDCR prediction but is essentially different from the CICR prediction. These results
indicate that the actual CR process has the configuration-dependent rate constant and thus the relaxation
function does not have the factorized form. This conclusion is in harmony with the conclusion deduced
from the viscoelastic data.
It should be also emphasized that the CDCR model, rigorously formulated for C n; t; n 0 ; has a definite
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1377
limitation. This model predicts that the dielectric mode distribution of the probe is identical to the
distribution for the pure reptation process irrespective of M1 (cf. Eq. (159)). The M1-insensitive mode
distribution seen for the PI probes (Fig. 53) is very close to the distribution for the monodisperse PI that
is significantly broader than the reptation prediction (see Fig. 46). This result demonstrates that the
Rouse-CR and reptation dynamics incorporated in the CDCR model do not accurately describe the
actual relaxation of the probes in blends and monodisperse systems. This failure of the Rouse-CR and
reptation dynamics is further demonstrated from the eigenmode analysis explained below.
5.3.2. Linear PI probes with 0 , np =N , 0:5
5.3.2.1. Overview Watanabe et al. [115] synthesized a series of monodisperse linear PI samples having
almost identical molecular weights M2 50 ^ 5 × 103 but differently once-inverted type-A dipoles.
They examined the dielectric relaxation behavior of these PI samples in bulk state [115] as well as in two
entangling PB matrices [116,121]. Fig. 55 compares e 00 of those PI chains in the three environments. The
numbers indicate the reduced location of the inversion point, n p/N.
In Fig. 55, the unfilled circles and triangles indicate the data for the PI chains in the high-M PB matrix
M1 263 × 103 and low-M PB matrix M1 9:24 × 103 ; respectively. The PI chains (with
y 2 0:05) satisfy the criterion y 2 M2 , Mc;2 and are entangled only with the matrix PB chains.
These dilute PI probes have M2 =Me;2 ù 29 (Me;2 ù 1:7 × 103 for those probes in PB matrices; see
Section 5.3.1.3). For the monodisperse bulk PI systems that are regarded as blends of dilute PI probes
in matrices of identical chains, the data are shown with the filled squares. These systems have M2 =Me0 ù
10 (Me0 ù 5 × 103 for bulk PI).
In Fig. 55, the e 00 data at 408C are reduced by the dielectric intensity for the global PI chain motion De
and plotted against the reduced frequency vte;1 so that the dielectric mode distributions in the three
environments are most clearly compared. For respective dipole-inverted PI chains with np =N . 0; the e 00
peak does not necessarily correspond to the slowest eigenmode of C n; t; n 0 ; an extreme case is noted for
np =N 0:5 for which the peak corresponds to the second-slowest eigenmode (cf. Fig. 49). Thus, in
respective environments, te;1 for the slowest eigenmode of each dipole-inverted chain was evaluated
from the te;1 data of non-inverted PI probes having various M [115,116,121].
In the plots shown in Fig. 55, the small differences in M2 of the dipole-inverted PI probes are corrected
by the factor te;1 included in the reduced frequency. Thus, in each environment, we can regard the
motion of these probes to be exactly the same. Nevertheless, we note significant differences in their
dielectric mode distribution. The distribution becomes first broader (and roughly bimodal) and then
narrower with increasing n p/N from 0 to 0.5 (i.e. on the shift of the dipole-inversion point from the chain
end to center). The distribution for np =N 0:5 agrees with that for np =N 0; as already noted in Fig. 48
for monodisperse bulk PI. These changes in the mode distribution reflect changes in the dielectric mode
intensity gp with n p; see Eq. (205). (Note that the span of the relaxation times, specified by the te;p =te;1
ratio, is the same for the dipole-inverted probes exhibiting the same motion in each environment.)
5.3.2.2. CR contribution Data for the viscoelastic CR time, tCR;G ; are available for dilute PI probes of
various M2 in entangling matrices of much shorter PB chains [114]. (An example of the storage moduli
of such PI probes in the CR-dominant regime is shown in Fig. 38.) The corresponding dielectric CR time
is described by an empirical equation [114], tCR;e 2tCR;G 8:94 × 10225 M13 M22 s (at 408C), from
which the tCR;e of the dilute PI probes examined in Fig. 55 are estimated. The ratio of this tCR;e to
1378
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
Fig. 55. Dielectric loss e 00 of dilute dipole-inverted PI probes y 2 0:05 entangled with the high-M PB matrix
(M1 263 × 103 ; circles) and low-M PB matrix (M1 9:24 × 103 ; triangles). The e 00 data are also shown for the same PI
probes in their monodisperse bulk state (where the probe and matrix are identical; filled squares). For the best comparison of the
dielectric mode distribution in the three environments, the e 00 data at 408C are reduced by the dielectric intensity for the global
probe motion De and plotted against the reduced frequency vte;1 : Reprinted with permission from Macromolecules
1998;31:7528. q 1998 American Chemical Society [121].
the observed dielectric te;1 is tCR;e =te;1 5600 and 1.1 for the PI probe with np =N 0 M2 48:8 × 103
in the high-M and low-M PB matrices, respectively [121]. Thus the relaxation of this probe is dominated
by the CR mechanism in the low-M matrix while the CR contribution is negligibly small (i.e. the probe
relaxes much faster than the CR process) in the high-M matrix. For the same probe in its monodisperse
system, the tCR;e =te;1 ratio (estimated from PI/PI blend data [101]) is ù 3.5, and the CR contribution is
between the above two cases.
Thus, the CR contribution to the probe relaxation is significantly different in the three environments
examined in Fig. 55. Nevertheless, the dielectric mode distribution of the probe is nearly the same in
these environments (though some moderate differences are noted at intermediate to high v for the
probes with np =N 0:213–0·396). This result confirms the CR-insensitivity of the distribution of
slow dielectric modes.
5.3.2.3. Eigenmodes of C n; t; n 0 The eigenfunction fp of the local correlation function defined by Eq.
(204) is related to the dielectric mode intensity gp through Eq. (205). This fact in turn means that fp can be
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1379
experimentally determined from the gp data without assuming any specific molecular model. For convenience of this determination, we define an integrated eigenfunction [115]
p Znp
2
p
Fp n
f n dn
208
N 0 p
Utilizing Eq. (205) and considering the symmetry of fp, we can express this Fp in terms of gp as [115]
Fp N=2 2 Fp np ^gp np =41=2
Fp np ^gp np =41=2
for p odd
209
for p even
210
where the ^ signs are appropriately chosen so that Fp is a continuous, smooth function of n p. Thus we
can determine Fp(n p) from the gp(n p) data for the series of dipole-inverted chains that exhibit the same
motion (i.e. same Fp) but have different n p.
Following this strategy, Watanabe et al. analyzed the data shown in Fig. 55 to determine gp(n p) and
evaluate Fp(n p) for the slowest three eigenmodes p 1–3 [115,116,121]. At low v where the higherorder eigenmodes with p $ 4 have relaxed, the e 00 =De data of the dipole-inverted PI probes are written as
(cf. Eq. (28))
3
X
vte;p
e 00 v
gp
1 vIp$4 ;
De
1 1 v2 t2e;p
P1
Ip$4
X
gp te;p
211
p$4
The te;1 and te;2 values are known from the e 00 peak position of the PI probes with np =N 0 and 0.5, and
the te;3 value is estimated from a linear-least-square-fitting (LLSF) analysis of the e 00 =De data for np =N
0 [115]. Thus Eq. (211) is a linear equation of four unknown quantities, gp p 1–3 and Ip$4 : Watanabe
et al. [115,116,121] determined these quantities from the LLSF analysis of the e 00 =De data for np =N
0–0:5 on the basis of Eq. (211) and evaluated Fp(n p) from the resulting gp values p 1–3: (They also
examined uncertainties in these Fp(n p) and found a satisfactorily high accuracy [115].)
Fig. 56 shows the n p dependence of Fp(n p) thus obtained for the dilute PI probe M1 48:8 × 103
[115,116,121]. For easy comparison, the base-shifted eigenfunctions DFp np Fp np 2 Fp N=2 ( 0
at np N=2 irrespective of the probe dynamics) are plotted against n p/N. We note that the DFp(n p) and/or
fp(n p) ( 221==2 dDFp =d np =N; cf. Eq. (208)) are nearly the same for the dilute PI probe in the three
environments where the CR contribution to the probe relaxation is significantly different
(tCR;e =te;1 5600 and 1.1 in the high-M and low-M PB matrices and tCR;e =te;1 ù 3:5 in the monodisperse bulk system) [121].
In Fig. 57, te;p of the dilute PI probe in the three environments is plotted against the eigenmode index p
[121]. These te;p data are well described by a power-law relationship, te;p / p2b with b 2:01; 1.85,
and 1.98 in the high-M PB matrix, in the low-M PB matrix, and in the monodisperse bulk state,
respectively. The difference in these b values is minor, and we can conclude that the te;p span
(te;p =te;1 ratio) is nearly the same in the three environments.
In the high-M PB matrix, the PI probe relaxes via a certain mechanism other than CR. On a decrease of
the entanglement lifetime, this mechanism competes with the CR mechanism. This competition does not
change the functional form of C n; t; n 0 if the two mechanisms have the same fp and te;p span (as noted,
for example, for the CDCR model considering competition of reptation and Rouse-CR; see Eq. (159)).
1380
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
Fig. 56. n p dependence of integrated eigenfunctions Fp(n p) for the slowest three eigenmodes of the dilute PI probe
(M2 48:8 × 103 ; y 2 0:05) entangled with the high-M PB matrix (M1 263 × 103 ; circles) and low-M PB matrix
(M1 9:24 × 103 ; triangles). Fp(n p) are also shown for the same PI probe in its monodisperse bulk state (filled squares).
For the best comparison of the eigenfunctions in the three environments, the plots are shown for the base-shifted eigenfunctions
DFp np Fp np 2 Fp N=2 that have a value 0 at np N=2 irrespective of the probe dynamics. The dashed curves indicate
sinusoidal eigenfunctions commonly deduced from the pure reptation and Rouse-CR models. Reprinted with permission from
Macromolecules 1998;31:7528. q 1998 American Chemical Society [121].
Figs. 56 and 57 demonstrate that the fp and te;p span (for p 1–3) are nearly the same for the actual CR
and competing mechanisms. This feature of fp and te;p naturally results in the slow dielectric mode
distribution being insensitive to the competition (i.e. to changes in the CR contribution), as observed in
Figs. 53 and 55.
5.3.2.4. Comparison with models The Rouse-CR and pure reptation models commonly predict the
power-law p dependence, te;p / p22 : This dependence is close to the observed dependence (in particular
in the high-M matrix; cf. Fig. 57). However, the prediction for the eigenfunctions is different from the
experimental results: The two models commonly predict sinusoidal eigenfunctions (cf. Eqs. (45)
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1381
Fig. 57. Dependence of te;p on the eigenmode index p for the dilute PI probe (M2 48:8 × 103 ; y 2 0:05) entangled with the
high-M PB matrix (M1 263 × 103 ; circles) and low-M PB matrix (M1 9:24 × 103 ; triangles). For comparison, the te;p data
are also shown for the same probe in its monodisperse bulk state (filled squares). Reprinted with permission from Macromolecules 1998;31:7528. q 1998 American Chemical Society [121].
and (68))
fp0
ppnp
n sin
;
N
p
DFp0
#
p "
2
pp
ppnp
cos
2 cos
n
pp
2
N
p
212
In Fig. 56, these DFp0 p 1–3 are shown with the dashed curves. The experimental DFp are nonsinusoidal and certainly distorted
these sinusoidal DFp0 : Specifically, the models overestimate the
p from
p
gradient dDFp n=d n=N 2fp n in the vicinity of the chain ends, i.e. ufp0 nu . ufp nu for
n=N # 0:1. These differences between the models and experiments are well beyond the uncertainties
in the evaluation of DFp [115,116,121]. In fact, the difference between the observed and calculated slow
dielectric mode distribution (symbols and curve in Fig. 46b) is essentially due to the difference in the
observed and calculated gp that in turn reflects the difference of fp and fp0 ; cf. Eq. (205). (The model
prediction agrees well with the data for the te;p span, the other factor determining the mode distribution.)
Thus, the Rouse-CR and pure reptation dynamics do not accurately describe the probe relaxation
behavior. In other words, the actual CR relaxation proceeds via non-Rouse dynamics, and the relaxation
under absence of CR (in high-M matrices) is not the pure reptation relaxation. Specifically, the nonRouse nature of the actual CR process is in harmony with the differences between the experiments and
the Rouse-CR model observed for the viscoelastic moduli (Fig. 38) and diffusion coefficient (Fig. 39).
Watanabe et al. [115,116] further discussed the difference between the observed, non-sinusoidal fp and
1382
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
the model fp0 : The eigenfunction equation giving the sinusoidal fp0 n coincides with the Schrödinger
equation for a quantum particle in a square well potential having the boundaries at n 0 and N,
and fp0 n2 is analogous to the probability density of this particle. From this analogy, the difference
between fp0 and fp (ufp0 nu . ufp nu for n=N # 0:1) can be attributed to an additional potential near the
well boundaries that decreases the probability density fp n2 near the boundaries. This potential
corresponds to a relaxation mechanism(s) not considered in the Rouse-CR and pure reptation models.
This extra mechanism enhances the relaxation near the probe chain ends to provide fp (and DFp) with the
non-sinusoidal feature.
For the non-Rouse type CR relaxation observed for dilute probes entangled with much shorter
matrices, one possible mechanism enhancing the relaxation near the probe ends is the contour-length
variable local jumps depicted in Fig. 7d [116]. However, any mechanism giving this enhancement can
yield the non-sinusoidal feature of fp. In other words, the origin of this feature is not necessarily identical
for the two cases of CR-free and CR-dominant environments (in high-M and low-M matrices). Further
theoretical studies are necessary for this problem.
5.4. Comparison of dielectric and viscoelastic properties
The dielectric and viscoelastic properties differently reflect the same motion of the chains (cf. Section
2): the former reflects orientational correlation of submolecules (entanglement segments) at two separate
times while the latter detects isochronal orientational anisotropy of respective submolecules. This
difference enables us to reveal detailed features of the chain dynamics from comparison of those properties. The features thus found are summarized below.
5.4.1. Test of tube dilation
If the entanglement network (or tube) is fixed in time scales of relaxation of monodisperse chains
having non-inverted type-A dipoles, the normalized relaxation modulus m t G t=GN and dielectric
relaxation function F (t) coincide with each other (cf. Eq. (88)). On the other hand, if the tube dynamically dilates, we find m t ù F t2 (cf. Eq. (126)). These two cases can be easily distinguished
experimentally.
Adachi et al. [100] reported the dielectric and mechanical loss data for well entangled monodisperse
linear PI chains without dipole inversion M 140 × 103 ; M=Me 28: Matsumiya et al. [183] utilized
those data to examine the above two possibilities of fixed and dilating tubes. Their results are shown in
Fig. 58. If the tube is fixed, m t F t and thus the reduced losses e 00 =De and G 00 /GN should coincide
with each other. Clearly, this is not the case for the data. This result suggests that the molecular picture of
the fixed tube is not the accurate picture (even if we incorporate the contour length fluctuation mechanism in the fixed tube model).
Adachi et al. [100] reported the dielectric relaxation spectrum that corresponded to gp and t p for F (t)
(Eq. (27)). The solid curve in Fig. 58 shows e 00 =De calculated from this empirical spectrum. Utilizing this
spectrum, Matsumiya et al. [183] calculated m t ù F t2 and the corresponding G 00 /GN for the case of
the dynamic tube dilation. The calculated G 00 /GN, shown with the dotted curve, are close to the G 00 /GN
data, although the calculated v peak is a little larger than the observed v peak. Similar results were found for
PI chains with M=M e 10 and 19 [183]. Thus the tube seems to dilate in the time scale of relaxation of
the linear PI chains with M=Me 10–28; although the chains do not necessarily reptate along the dilated
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1383
Fig. 58. Reduced dielectric and mechanical loss data e 00 =De and G 00 =GN of monodisperse linear PI M 140 × 103 at 08C [100].
The dotted curve indicates G 00 =GN calculated from the dielectric relaxation spectrum (solid curve) under the assumption of tube
dilation (Eq. (126)) [183]. (Data taken from Ref. [100].)
tube with their intrinsic Dc [183]. It is an interesting subject of future studies to compare e 00 =De and G 00 /
GN and test the validity of the tube dilation picture also for star PI chains.
5.4.2. Coherence in the submolecule motion
Since the dielectric and viscoelastic properties differently reflect the chain motion, no general relationship exists between these properties: For example, the reptation and Rouse-CR motions result in
exactly the same v dependence of e 00 but quite different v dependence of G 00 . Thus, we have no general
method to calculate G p from e p, and vice versa. However, the lack of this method in turn means that a
specific relationship between G p and e p observed for a particular system includes some detailed information for the chain dynamics in that system.
Considering these points, Watanabe et al. [116,119,122] specified particular relationships for two
extreme cases and compared these relationships with experimental data. Their results are summarized
below.
5.4.2.1. Equation of motion We consider probe chains each composed of N2 entanglement segments
(submolecules). The chains have type-A dipoles without inversion, and their molecular weight and
concentration (in mass/volume unit) are M2 and c2, respectively. Changes in the submolecule bond
vector u in a short interval of time between t and t 1 Dt are generally determined by the probe chain
conformation at the time t and described by a time-evolution equation of the form [116]
u n; t 1 Dt Lp n; Dtu n; t 1 thermal noise term
213
Here, Lp n; Dt ( 1 for Dt 0) is an operator acting on u at time t: L p is determined by the type of
chain dynamics and the operation L pu may involve either local or non-local operations (or both). Eq.
(213) enables us to formulate time evolution equations (in the continuous limit) for the local correlation
function C(n,t;n 0 ) and orientation function S(n,t). From solutions of these equations, we can find relationships between e p and G p for two particular cases [116].
1384
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
5.4.2.2. Dielectric properties
For C(n,t;n 0 ), the time evolution equation derived from Eq. (213) is [116]
2
C n; t; n 0 LC nC n; t; n 0
2t
214
Here, the operator LC is defined in terms of L p (Eq. (213)) as
"
#
2kLp n; Dtl
LC n
2Dt
Dt!0
215
Under the initial and boundary conditions, C n; 0; n 0 dnn 0 and C n; t; n 0 0 for n; n 0 0 and N2, the
eigenfunctions fp(n) and the relaxation times te;p of C are determined by [116]
LC n fp n 21=te;p fp n
fp 0 fp N2 0
216
Utilizing these fp and te;p ; we can express the solution of Eq. (214) in the form of eigenmode expansion
(Eq. (204)) and calculate all dielectric properties from this solution.
5.4.2.3. Viscoelastic properties We consider the orientational relaxation of the probe chain after
imposition of a small step shear strain. We define an orientation function for two different submolecules
S2 n; n 0 ; t 1=a2 kux n; tuy n 0 ; tl
S n; t for n n 0
217
For this function, the time evolution equation deduced from Eq. (213) is written as [116]
2
S n; n 0 ; t LS n; n 0 S2 n; n 0 ; t
2t 2
218
Here, LS is an operator defined in terms of L p (Eq. (213))
"
#
2kLp n; DtLp n 0 ; Dtl
0
LS n; n
2Dt
Dt!0
219
This LS is given as the second-order moment of L p while the operator LC for C (Eq. (215)) includes the
first-order moment. Thus a relationship between LS and LC changes with the type of chain dynamics
and the solution of Eq. (218) cannot be generally expressed in terms of fp and te;p defined for C. However,
for two extreme cases, specific expressions can be found.
For the case of incoherent submolecule motion where the short time motions of two submolecules in
individual chains are not correlated at all, Eq. (219) is decoupled as LS n; n 0 LC n 1 LC n 0 : For
this case, we can explicitly expand S2 with respect to fp and te;p : The resulting expression for the
normalized modulus, Gpr Gp M2 =c2 RT; is [119]
Gpr;inc
N2 X
ivte;p =2
1 ZN2
2
v 2
fp n dn
N2 0
1 1 ivte;p =2
p1
p
i 21
220
For the other case of coherent submolecule motion where this motion is perfectly correlated throughout the backbone of individual chains, S2 is differently expanded with respect to fp and te;p : For this case,
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
Gpr is given by [119]
N2 2
ivte;p
2GN2 M2 X
1 ZN2
fp n dn
Gpr;coh v
N2 0
c2 RT
1 1 ivte;p
p1
1385
221
Here, GN2 is the plateau modulus of the probe chains. (In Eqs. (220) and (221), we have used an
expression of GN2 for the affine deformation, GN2 c2 RT=Me;2 N2 c2 RT=M2 : If we use the Doi–
Edwards expression, Eq. (220) is slightly modified (the front factor “2” becomes “8/5”) [116] but Eq.
(221) remains the same [119]).
The calculated moduli are quite different for the above two cases, and we can examine the coherence
of the submolecule motion by comparing these moduli with the Gpr data. The coherence can be also
examined through a direct comparison of the e 00 and G 00 data: If the submolecule motion is coherent,
these data of the probe chains (without dipole inversion) obey a simple relationship [119]
e 00 v=De G 00 v=GN2
222
Thus, some degree of incoherence is concluded if the e 00 v=De and G 00 v=GN2 data do not coincide with
each other.
5.4.2.4. Comparison with data For a dilute PI probe without dipole inversion (M2 48:8 × 103 ;
examined in Fig. 55), Watanabe et al. [122] determined the normalized moduli Gpr Gp2;B M2 =c2 RT in
the high-M and low-M PB matrices (with 1023 M1 263 and 9.24, respectively). Fig. 59 shows these G 0r
and G 00r data (unfilled and filled symbols) together with the data for the same probe in its monodisperse
bulk state [119,122]. For the cases of incoherent and coherent submolecule motions, the moduli calculated from the available fp and te;p data (p 1–3; cf. Figs. 56 and 57) are shown with the solid and
dashed curves, respectively. (The fp n 221=2 dDFp n=d n=N (cf. Eq. (208)) were obtained by
numerically differentiating the DFp(n) data shown in Fig. 56 [116,119,122].) These curves, calculated
for the lowest three eigenmode, are shown at low v where an error due to the use of only these
eigenmodes is acceptably small [122].
In the low-M and high-M PB matrices, respectively, the PI probe relaxation is dominantly and
negligibly contributed from the CR mechanism (tCR;e =te;1 1:1 and 5600; see Section 5.3.2.2). In the
monodisperse system tCR;e =te;1 ù 3:5; the CR contribution is between these two extremes. As noted in
Fig. 59, the Gpr data of the probe in the low-M matrix (bottom curves) are close to Gpr;inc calculated for the
incoherent case. In contrast, the data in the high-M PB matrix (top curves) agree well with Gpr;coh for the
coherent case. In the monodisperse system, the data are between Gpr;inc and Gpr;coh (middle curves). These
results clearly indicate that the coherence in the submolecule motion decreases with increasing CR
contribution (and finally vanishes in the CR-dominant environment).
This coherence is further examined in Fig. 60 where the reduced mechanical and dielectric losses
G 002;B =GN2 and e 00 /De of the dilute PI probe are compared. In the low-M PB matrix and monodisperse
system (bottom and middle curves), these losses do not coincide with each other and Eq. (222) is not
valid, confirming some degree of incoherence due to the CR contribution to the probe relaxation. In
contrast, in the CR-free high-M PB matrix, the losses coincide with each other and Eq. (222) is valid.
Thus, the submolecule motion becomes highly coherent when the CR contribution vanishes, confirming
the result seen in Fig. 59.
Concerning the behavior of the probe in the CR-free high-M matrix, we note that the observed mode
1386
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
Fig. 59. Comparison of the normalized moduli Gp2;B M2 =c2 RT data of the dilute PI probe (M2 48:8 × 103 ; y 2 0:05) in the
high-M PB matrix (M1 263 × 103 ; top curves) and low-M PB matrix (M1 9:24 × 103 ; bottom curves) with the moduli
calculated from the dielectrically determined fp(n) and te;p p 1–3 for the cases of coherent and incoherent submolecule
motions (dashed and solid curves). The comparison is made also for the same probe in its monodisperse bulk state (middle
curves). Reprinted with permission from Macromolecules 1998;31:7538. q 1998 American Chemical Society [122].
distribution of G 002;B =GN2 and e 00 /De is considerably broader than that predicted for the pure reptation
(solid curve in Fig. 60). The observed G 002;B =GN2 and e 00 /De coincides with each other and are proportional to v2b with b ù 1=4 at v . vpeak : These features can be explained from the generalized tube
model considering reptation and contour length fluctuation (CLF) in the fixed tube. Since CLF enhances
the relaxation near the chain ends, it is conceivable that CLF gives the non-sinusoidal feature to the
observed eigenfunctions fp and Fp (Fig. 56). However, the fp of this generalized tube model has not been
specified, and the model has not been critically tested for the fp and te;p data. Thus, it seems still early to
conclude that the probe behavior in the CR-free environment is fully described by that model. Further
theoretical and experimental studies are desirable for this problem.
Finally, some comments need to be added for the actual CR relaxation process. The fp(n) for this
process is non-sinusoidal and considerably different from the sinusoidal fp0 n deduced from the RouseCR model. Nevertheless, the viscoelastic modulus calculated from fp, the solid curves at the bottom of
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1387
Fig. 60. Reduced mechanical and dielectric losses G 002;B =GN2 and e 00 =De obtained for the dilute PI probe (M2 48:8 × 103 ;
y 2 0:05) in the high-M PB matrix (M1 263 × 103 ; top curves) and low-M PB matrix (M1 9:24 × 103 ; bottom curves). For
comparison, the losses are also shown for the same PI probe in its monodisperse bulk state (middle curves). The solid curve
shown for the probe in the high-M PB matrix indicates the reduced loss predicted from the pure reptation model. The frequency
scale of this curve is adjusted so that the curve has the maximum at the same frequency as the data. Reprinted with permission
from Macromolecules 1998;31:7538. q 1998 American Chemical Society [122].
Fig. 59, is very close to the Rouse-CR modulus (for fp0 ) at low v . This fact demonstrates that the
viscoelastic properties have a rather poor resolution for the detailed features of the chain dynamics
because some details of the dynamics are averaged in these properties (e.g. fp2 is averaged to give the
viscoelastic mode intensity in the CR-dominant regime; cf. Eq. (220)). A similar argument holds also for
the dielectric properties obtained only for the type-A chains without dipole inversion as well as for the
center-of-mass diffusivity.
It is important to examine the detailed features of the chain dynamics from various experiments
having high resolutions; for example, the dielectric experiments for a series of chains having differently
inverted dipoles, segmental diffusion experiments for a series of differently labeled chains in time scales
,t 1, and rheo-optical experiments for a series of chains having various locations of the optical label
1388
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
Fig. 61. Nonlinear relaxation modulus G(t,g ) of an entangled linear PS solution (M 8:42 × 106 ; c 0:06 g cm23 ) in
chlorinated biphenyl at 308C. The shear strain g is ,0.57, 1.25, 2.06, 3.04, 4.0, 5.3, and 6.1 from top to bottom. Reprinted
with permission from Macromolecules 1982;15:1068. q 1982 American Chemical Society [90].
[61,62,65] (although the nematic interaction [167–170] is to be properly accounted in the last experiments). These experiments undoubtedly contribute to future progresses in our understanding of polymer
dynamics.
6. Nonlinear viscoelastic behavior
Polymer chains have largely distorted conformations under large strains/fast flow thereby exhibiting
nonlinear dynamics that is significantly different from the equilibrium dynamics observed in the linear
response regime. Thus the nonlinear viscoelastic properties include important information about the
strain/flow effects on the chain dynamics. In addition, these properties govern the actual industrial
processing of polymeric materials and thus have an practical importance, too. This section briefly
summarizes some nonlinear viscoelastic features and explains the level of our current understanding.
6.1. Damping behavior
6.1.1. Linear and star chains under single-step strain
Viscoelastic relaxation under large single-step shear strains g is characterized by the nonlinear
relaxation modulus G(t,g ) (Eq. (10)). Extensive studies [86–93] revealed that G(t,g ) exhibits characteristic damping behavior. As an example, Fig. 61 shows G(t,g ) data of an entangled linear PS solution
obtained by Osaki et al. [90]. For small g ,0:57; G t; g is quite insensitive to g and reduces to the
linear relaxation modulus, G(t). For larger g , G(t,g ) decreases with g and exhibits two-step relaxation.
However, at long t, the t dependence of G(t,g ) (representing the viscoelastic mode distribution) is
independent of g and coincides with that of G(t). This long time behavior is summarized as the
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1389
Fig. 62. Shear damping function h(g ) of entangled linear [90] and star [91] PS solutions with 5 # M=Me , 50: For comparison,
h(g ) of non-entangled linear PS solutions [195] M=Me # 2 are also shown. The solid and dashed curves indicate the
predictions of the Doi–Edwards model (without IAA) and the Mead–Larson–Doi model, respectively. (Data taken from
Refs. [90,91,165,195].)
well-established time–strain separability [86–93], G t; g h gG t with h(g ) being the shear damping
function. For entangled linear PS systems, Osaki et al. [86–90] indicated the validity of this separability
at times .t k , where t k is a characteristic time that is proportional to M b b ù 2 and fairly close to the
Rouse relaxation time t R,G.
Fig. 62 summarizes the h(g ) data for entangled, monodisperse linear and star PS solutions having
various M/Me ratios between 5 and 50 (squares) [90,91]. The h(g ) data of these solutions agree with each
other, meaning that the magnitude of nonlinear damping is the same for linear and star chains. Furthermore, the h(g ) data are indistinguishable for entangled solutions and melts of monodisperse polymers of
various chemical spices; see the literature data compiled by Osaki [93].
The above results, insensitivity of h(g ) to the entanglement density (in the range 5 # M=Me , 50) and
to the star-shaped branching, are in accord with the prediction of the Doi–Edwards model (Section
3.2.4.1). In fact, a quantitative agreement of the data (squares) and prediction is noted in Fig. 62 where
the DE prediction (Eq. (79)) without the independent alignment approximation (IAA) is shown with the
solid curve. (The data are in even better agreement with the prediction with IAA; not shown here.) In
early stages of the theoretical developments, this agreement was considered to be an evidence of the
chain retraction process in the fixed tube.
In later stages, various modifications were made for the DE model in order to remove flaw in its
predictions, e.g. the M 3 dependence of h 0 and g_ 23=2 dependence of h g_ in the linear and nonlinear
regimes. In principle, the calculated h g changes with the modifications of the nonlinear dynamics (cf.
Section 3.8). Since the h g data are well described by the original DE model, these modifications are to
be made in a way that the changes of h g are just minor.
Considering this point, Mead, Larson, and Doi (MLD) [165] compared the hMLD(g ) predicted from
their convective CR model (Section 3.8.2.2) with the hDE(g ) from the DE model, both for monodisperse
1390
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
chains. The results are shown in Fig. 62. The hMLD (dashed curve) is somewhat smaller than hDE (solid
curve) at large g , and the agreement with the data is a little worse for the MLD model. However, this
difference between hMLD and hDE is rather minor and the convective CR (CCR) mechanism incorporated
in the MLD model certainly improves the model predictions for the nonlinear properties in general, as
explained later for the non-Newtonian flow behavior.
Concerning this point, we note that the g dependence of h(g ) data is weaker for polymers having a
broad, unimodal molecular weight distribution such as low-density polyethylene (LDPE) [93]. The CCR
mechanism would have a pronounced effect on h(g ) of such polymers. It is an interesting subject of
future studies to compare the model predictions with the h(g ) data of polymers having a wide variety of
polydispersity.
6.1.2. Additional comments for h(g ) of linear and star chains
For highly entangled, monodisperse linear and star chains with M=Me . 50; the g dependence of h(g )
is much stronger than that of hDE(g ), as found by Fukuda et al. [194] and by Vrentas and Graessley [92]:
For g . 1; the h(g ) data sometimes exhibit an order-of-magnitude difference from the calculated hDE(g ).
Since the assumption of fixed tube holds better for highly entangled chains, the very strong damping
observed for those chains is not attributed to the flaw of this assumption.
Marrucci and Grizzuti [196] made a free energy analysis and related the very strong damping to the
strain-induced instability: within the context of the tube model, a uniform deformation becomes unstable
and the highly entangled systems are segregated into differently deformed domains under large strains
where a differential modulus Gd 2s=2g (/ gh g=2g at long t) has a negative value. This segregation
can result in the very strong damping. Concerning this point, Archer et al. [197] observed an apparent
slip at the surfaces of the rheometer fixtures (i.e. non-uniform strain distribution) for a highly entangled
PS solution (with M=Me , 90).
Now, we turn our attention to the behavior of non-entangled chains. Takatori et al. [195] found that
non-entangled linear PS solutions M=M e # 2 exhibit modestly nonlinear damping. Their h(g ) data are
shown in Fig. 62 (circles). The damping itself is not a unique feature of entangled chains. Instead, the
damping is observed whenever the relaxation is faster for the chain stretch than for the chain orientation.
Thus there would be some mechanism that raises a difference in the rates of these relaxation processes
for the non-entangled chains. However, this mechanism has not been specified. A theoretical challenge is
necessary for this problem.
6.1.3. Pom–pom chains under single-step strain
Archer and Varshney [60] examined the nonlinear damping behavior of 3-arm pom–pom PB (q 3;
the structure depicted in Fig. 13). Fig. 63 shows the h(g ) data for a representative pom-pom PB having
the backbone and arm molecular weights Mb and Ma as indicated. These data, obtained in the terminal
regime, represent the nonlinear damping behavior of the backbone. The solid and dashed curves,
respectively, indicate high-g and low-g predictions of the Bick–McLeish model [159] considering
the tension balance between the backbone and arms (cf. Section 3.9). In this model, the backbone
initially having a large stretch ratio l . lc q shrinks by sucking the arms into its tube (high-g
behavior), while this shrinkage does not occur if the backbone initially has l , lc (low-g behavior).
The high-g and low-g predictions correspond to respective cases.
For g , 6; the observed h(g ) is considerably larger than the high-g prediction. The h(g ) rapidly
decreases at g ù 6 and becomes close to this prediction for g . 6: This critical shear strain, 6,
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1391
Fig. 63. Shear damping function h(g ) of a bulk pom-pom PB q 3 with Mb and Ma as indicated. The solid and dashed curves,
respectively, indicate high-g and low-g predictions of the Bick–McLeish model. Reprinted with permission from Macromolecules 1998;31:6348. q 1998 American Chemical Society [60].
corresponds to the stretch ratio of lc 3:2 [60], which is very close to the l c q 3 considered in
the model. This result suggests a fundamental validity of the idea of arm withdrawal incorporated in the
model. This validity in turn demonstrates the difference in the nonlinear behavior of the pom–pom
backbone (having no free ends) and the star arm/linear chain (having at least one free end).
In a range of g , 6 g , gc ; the h(g ) data do not closely agree with the low-g prediction but
considerably decreases with increasing g . 1: Thus, for the pom–pom examined in Fig. 63, the lowg damping is not quantitatively described by the Bick–McLeish model. A similar discrepancy is noted
also for the other pom–pom PB sample (having different Ma and Mb) [60], and a theoretical improvement
is desirable for the low-g behavior. From the experimental side, it is an interesting challenge to
synthesize branched polymers of various topological structures (including pom–poms of different q)
and examine their nonlinear behavior. These theoretical and experimental efforts certainly provide us
with large progresses in our understanding of dynamics of branched polymers.
6.1.4. Linear chains under double-step strain
Stress relaxation experiments under double-step shear strains are an important mode of nonlinear
experiments that could provide us with some insights for non-uniformity of the relaxation behavior
along the chain backbone. This importance is demonstrated, for example, in the test of the Doi–Edwards
(DE) constitutive equation.
Under IAA, the DE model results in the BKZ-type constitutive equation; see Section 3.2.4.2. Viscoelastic responses of this equation and the rigorous DE constitutive equation [18,178] can be easily
distinguished under a double-step strain with certain conditions. As an example, Fig. 64 shows time
evolution of the shear stress s of an entangled linear PS solution subjected to the double-step shear strain
[88]. The first and second strains are g1 22:89 and g2 1:45 (in the opposite direction), and the latter
is applied 200 s after imposition of the former. After imposition of the second strain, s changes its sign
from positive (unfilled circles) to negative (filled circles) with time and once becomes zero at tc ù 180 s
1392
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
Fig. 64. Nonlinear relaxation behavior of a PS solution (M 6:7 × 105 ; c 0:4 g cm23 ) in chlorinated biphenyl after imposition of a double-step shear strain at 308C. The first and second strains are g1 22:89 and g2 1:45 (in the opposite direction),
and the latter is applied 200 s after imposition of the former. The magnitude of the shear stress is double-logarithmically plotted
against the time after imposition of the second strain. The filled and unfilled circles indicate negative and positive stresses,
respectively. The solid and dashed curves indicate the stresses (with the signs as indicated) calculated from the constitutive
equations of DE form with and without IAA. Reprinted with permission from J Rheol 1981;25:549–62 [88].
during the course of this change. The magnitude of this s as well as tc are well described by the rigorous
form of the DE constitutive equation with the experimental m obs(t) being utilized in place of m rep(t)
(dashed curve). In contrast, a significant difference is noted for the BKZ equation obtained under IAA
(solid curve).
The above behavior of s indicates non-uniformity of the orientational relaxation along the chain
backbone. At the time of imposition of the second strain, the rapidly relaxing portion of the chain (near
the ends) has little memory of the first strain and is orientated in the positive direction due to the second
strain. In contrast, the slowly relaxing portion (near the chain center) largely preserves the initial
orientation in the negative direction and is not positively re-orientated by the second strain having
the smaller magnitude ug2 u , ug1 u: The stress due to the latter portion is smaller in magnitude at
short times but longer-lived than the stress due to the first portion. This leads to the observed changes
in the sign of s , and the agreement of the data with the constitutive equation of the rigorous DE form
(utilizing m obs) demonstrates a limitation of the affine shrinkage approximation that corresponds to IAA
(see Section 3.2.4.2).
The DE model has been modified so as to improve the agreement with nonlinear data such as h g_ ; see
Section 3.8. This modification changes the functional form of the DE constitutive equation. Thus, it is
interesting to compare the constitutive equation of the improved models with the double-step strain
experiments and re-examine the non-uniformity of the relaxation along the chain backbone. This
comparison, not fully conducted yet, is an interesting subject of future studies.
6.2. Shear-thinning behavior
6.2.1. Linear chains in steady state
For monodisperse, entangled linear polymer chains, shear thinning features of the non-Newtonian
viscosity h g_ have been extensively investigated [1,2]. As an example, Fig. 65 shows the h g_ data of
monodisperse PS melt M 1:8 × 105 obtained by Penwell et al. [198] The h g_ data are reduced by
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1393
Fig. 65. Nonlinear flow behavior of monodisperse, linear PS melt M 1:8 × 105 : The non-Newtonian viscosity h (gÇ ) at
_ h : The
several temperatures between 142 and 174.58C is reduced by the zero-shear h 0 and plotted against a reduced shear rate gt
solid curve shows the prediction of the Graessley model. J Polym Sci, Polym Phys Ed 1974;12:1771–83. q 1982 John Wiley &
Sons, Inc. Adapted by Permission of John Wiley & Sons, Inc [198].
_ h ; where th is reciprocal of a
the zero-shear viscosity h 0 and plotted against a reduced shear rate gt
critical shear rate at the onset of thinning. At high g_ ; h g_ exhibits a power-law type thinning, h g_ /
_ h 2b with b ù 0:82: Experiments [1,2] for various monodisperse systems (solutions and melts)
gt
_ h (and this power-law thinning is univerindicate that the h g_ =h0 ratio is universally dependent on gt
sally observed) and that th is close to the terminal relaxation time kt Glw in the linear regime th =ktG lw
2–3: This close coincidence of th and kt Glw means that the thinning occurs when the flow affects the
global chain motion.
Theoretical efforts have been made for explanation of the above thinning behavior. Early models are
summarized in Graessley’s review [2]. Among those models, Graessley’s model [199] seems to best
describe the h g_ data. He considered a balance of disappearance and formation of entanglements
between the chains passing through each other under shear flow and suggested a decrease of the
entanglement density with increasing g_ : (These chains are mutually overlapping for a shorter interval
of time under faster flow and have a smaller chance to form the entanglements.) In Graessley’s model
[199], the shear thinning of monodisperse chains due to this decrease of the entanglement density is
described by
#
5=2 3=2 "
h g_
2
u
u 1 2 u2
21
21
cot u 1
cot u 1
223
p
h0
1 1 u2 2
1 1 u2
with
u
_ h
h g_ gt
h0 2
224
The model excellently describes the thinning behavior in the entire range of g_ ; see the solid curve in Fig.
_ h 29=11 ; agrees very well with the data.
65. In particular, the high-shear prediction, h g_ / gt
However, it should be also emphasized that Graessley’s model [199] focuses the non-Newtonian flow
behavior. In other words, his model is not formulated in a way giving a general framework of consistent
molecular description of viscoelastic and all other dynamic properties. The DE model is formulated to
1394
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
Fig. 66. The shear stress s (filled squares) and the first normal stress difference N1 (unfilled circles) of a PS solution
(M 2 × 106 ; c 10 wt%) in tricresyl phosphate at 408C. The solid curves indicate predictions of the Mead–Larson–Doi
model formulated for the local orientation tensor. Reprinted with permission from Macromolecules 1998;31:7895. q 1998
American Chemical Society [165].
offer this framework. However, the DE model includes a serious flaw in its steady flow behavior, the
flow-instability (decrease of s with increasing g_ ) under fast shear; cf. Eq. (84).
This flaw can be removed by incorporating the convective CR (CCR) mechanism in the model, as first
pointed out by Ianniruberto and Marrucci [164]; see Section 3.8.2. Their model [164] and the Mead–
Larson–Doi [165] model, both formulated for the average orientation tensor S t; give a constant s
(h / g_ 21 ; cf. Eq. (181)) under high shear. Thus no flow-instability emerges in these models. However,
these models do not quantitatively describe the observed high shear behavior, h g_ / g_ 20:82 :
A further improvement was achieved by Mead, Larson, and Doi [165] by incorporating the contour
length fluctuation (CLF) effect in their CCR model formulated for the local orientation tensor S~ s; t: In
Fig. 66, predictions of their model (solid curves) are compared with the shear stress s (filled squares)
and the first normal stress difference N1 (unfilled circles) of a PS solution [165]. Good agreement is
noted. Specifically, the predicted s continues increasing on an increase of g_ (due to CLF), and the
corresponding g_ dependence of h g_ is weaker than the g_ 21 dependence seen for the simpler CCR
In addition, under step strains, the h(g ) deduced from the model for S~ is close to h(g ) of the
models for S.
model for S; the latter being in reasonable agreement with the data (cf. Fig. 62). These results demonstrate the importance of the CCR mechanism (tuned by CLF) in the nonlinear behavior of entangled
chains.
6.2.2. Linear chains in transient state
Under relatively slow shear flow (at g_ , tR;G 21 with t R,G being the Rouse relaxation time required
for the chain length equilibration), entangled linear chains exhibit characteristic transient behavior
[1,176]. For example, after start-up of the shear at a rate g_ ; the shear stress s exhibits a overshoot
peak at a time tpeak corresponding to a constant strain, gpeak g_ tpeak ù 2: (The peak height decreases
with decreasing g_ but g peak remains the same.) This g_ -insensitivity of g peak (and some other transient
features seen at g_ , tR;G 21 ) can be described by the BKZ-type DE constitutive equation with m rep
being replaced by the experimental m obs [176]. (The IAA utilized in derivation of this equation is a
harmless approximation for the shear flow at a constant g_ :)
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1395
Fig. 67. Growth of the shear stress s and the first normal stress difference N1 of a PI solution (M 1:67 × 106 ; c 10 wt%) in
squalene after start-up of shear flow at the rates gÇ as indicated. The rheo-optically determined Cs and CN1
(1029 C 2:6 ^ 0:2 Pa21 ; stress–optical coefficient) are plotted against the time after the start-up. Reprinted with permission
from J Rheol 1989;33:517–39 [161].
However, under fast shear flow, entangled chains exhibit transient behavior not explained by this DE
equation [161,176,200]. As an example, Fig. 67 shows growth of the shear stress s and the first normal
stress difference N1 of an entangled linear PI solution after start-up of shear flow at the rates g_ as
indicated. The rheo-optically determined Cs and CN1, with C being the stress–optical coefficient
1029 C 2:6 ^ 0:2 Pa21 [161], are plotted against the time after the start-up. The overshoot peak is
observed for both s and N1, and g peak increases with increasing g_ . tR;G 21 : The peak for N1, not
deduced from the DE equation, is mainly attributable to a transient maximum of the chain stretch ratio;
see Section 3.8.1.
Fig. 68 shows the g_ dependence of the g peak for entangled PI [161] and PB [200] solutions. The g peak
data for s and N1 are reduced by respective low-g_ values, g0peak ( 2.3 for s and 5.5 for N1), and
_ R;G : We note a universal relationship between the reduced strain
plotted against a reduced shear rate, gt
and shear rate. This relationship is well described by the solid curve that represents predictions of the
chain stretch model of Pearson et al. [162] formulated for the local orientation tensor S~ s; t: (For this
curve, the chain length equilibration time t eq included in the model is replaced by t R,G/4.) This result
demonstrates an importance of the chain stretch in the nonlinear transient behavior at g_ . tR;G 21 :
We should also remember that the above model results in the flow-instability in the steady state. For
this problem, the further refined model of Mead, Larson, and Doi [165] incorporates the CCR
mechanism together with the chain stretch mechanism; see Section 3.8.2.2.
1396
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
Fig. 68. gÇ dependence of the strains at the s and N1 peaks g peak seen after start-up of shear flow. Data are shown for well
entangled solutions of linear PI (circles and inverted triangles for s and N1) [161] and linear PB (usual triangles and squares for
s and N1) [200]. For clear comparison, g peak for s and N1 are normalized by respective low-gÇ values, g0peak ( 2.3 for s and
5.5 for N1), and plotted against a reduced shear rate, gÇ t R,G (t R,G experimentally determined Rouse relaxation time). The
solid curve indicates the prediction of the model by Pearson et al. [162] with t eq being replaced by t R,G/4. J Polym Sci Part B,
Polym Phys 1991;29:1589–97. q 1982 John Wiley Sons, Inc. Adapted by permission of John Wiley & Sons, Inc [162].
6.3. Strain-hardening behavior
Under uniaxial elongational flow, entangled polymers often exhibit the strain-hardening characterized
by an increase of the elongationalR viscosity growth function h1
E t; e_ (cf. Eq. (12)) above the growth
function in the linear regime ( 3 t0 G t 0 dt 0 for incompressible materials) [176,201–205]. An example
of this h1
E t; e_ is later shown in Fig. 69b. The hardening is enhanced for the polymers having broad
molecular weight distributions [203] (in particular bimodal distributions) and/or grafted branches [204],
i.e. for polymers having broad relaxation mode distributions (including very slow modes of small
intensities). This enhanced hardening is not deduced from the DE constitutive equation (cf. Eq. (85)).
Extensive studies [176,201–218] have been devoted for development of a constitutive equation that
can consistently describe the nonlinear responses under various types of deformation, e.g. the hardening
under elongational flow and the thinning under shear flow. Many studies examined the validity of the
BKZ equation having a special form [210–217]
s t
Zt
2∞
2G t 2 t 0
h I1 ; I2 C21
t 0 dt 0
t
2t 0
225
Here, the anisotropic part of the stress tensor s is written in terms of the linear relaxation modulus G(t),
t 0 ; and the generalized damping function h(I1,I2) that is determined by the
the Finger strain tensor C21
t
first and second invariances (I1 and I2) of the Finger tensor [176]. Under shear, this h(I1,I2) reduces to the
shear damping function h(g ). The validity was reported for Eq. (225) with some specific functional
forms of h(I1, I2) [210–216], although the use of Eq. (225) was also questioned [217] and a more general
form of the BKZ equation (including an additional Cauchy tensor term) was examined [218].
Concerning the validity of the BKZ equation, we here focus the effect of grafted branches on the
strain-hardening behavior. The pom–pom polymers belong to a class of materials having such grafted
branched. The pom–pom model by McLeish and Larson (ML) [160] does not result in the BKZ
equation; see Section 3.9. Differing from the BKZ equation, the ML model predicts the hardening
under the uniaxial elongation and planar extension while the thinning under shear, all at the same strain
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1397
Fig. 69. (a) Viscosity growth of pom–poms after start-up of various types of flow predicted from the McLeish–Larson model
[160]. The uniaxial and planar viscosities are divided by the Trouton ratios, 3 and 4, respectively, so that these viscosities
coincide with the shear viscosity at short times. (b) Viscosity growth data [205] of LDPE (IUPAC X) at 1258C. The strain rate is
the same for the three types of flow, e_ g_ 0:05 s 21. The uniaxial and planar viscosities are divided by the Trouton ratios, 3
and 4. The solid curve indicates the viscosity growth in the linear regime. Reprinted with permission from J Rheol
1989;33:119–17 and 1998;42:81–110 [160,205].
1398
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
rate; see Fig. 69a. McLeish and Larson compared these results with the viscosity data of low density
polyethylene (LDPE) obtained by Laun and Schuch [205] (Fig. 69b). Although the LDPE sample
examined was polydisperse and the chains therein would have had a dendritic comb-like shape, the
features seen in Fig. 69b are similar to those predicted for the pom–poms. If this qualitative coincidence
with the pom–pom behavior is a general feature of materials having grafted branches, the BKZ equation
is not an appropriate tool for full description of the nonlinear behavior of these materials.
However, for randomly branched PB (prepared via random coupling of monodisperse linear PB
chains at their backbones), Kasehagen and Macosko [216] reported the validity of the simple BKZ
equation (Eq. (225)) that utilized the h(I1,I2) proposed by Papanastasiou et al. [215]. This result might
mean some difference between the pom–poms and branched materials in general. Further studies are
desirable for the validity of the BKZ equation for these materials.
7. Concluding remarks
In this article, we have seen how the entangled polymers exhibit a wide variety of interesting dynamic
behavior according to their structures. In particular, prominent differences in the viscoelastic properties
of linear and branched polymers indicate the importance of the chain end mobility (affected by branching) in the global chain dynamics (Sections 4.1–4.3). Furthermore, the changes in the properties of
binary blends with the component molecular weights and compositions demonstrate significant effects
of the entanglement lifetime on this dynamics (Section 4.4).
After the development of the Doi–Edwards model that offered a remarkable framework for consistent
description of various dynamic properties from the chain motion, efforts have been continuously made to
generalize and refine the tube model. The role of the chain ends in the global dynamics was nicely
incorporated in early tube models (Sections 3.2–3.4), but these models did not account for the important
effect of the entanglement lifetime. Thus the later generalized tube models essentially looked for
methods of consistently combining the effects of the chain ends and entanglement lifetime on the global
chain dynamics, the former including the contour length fluctuation (Section 3.4) and the latter, the
thermal and convective constraint releases and dynamic tube dilation (Sections 3.5–3.8). These generalized models allow us to understand the entanglement dynamics to a certain depth. This understanding in
turn enables formulation of a clear molecular model for polymers having novel topological structures,
for example, the pom–poms (Section 3.9). However, those models are still insufficient to achieve our
final goal, establishment of a complete molecular picture of the entanglement dynamics. Further theoretical as well as experimental efforts are necessary to approach this goal.
From the theoretical side, it is to be noted that the generalized tube models are formulated for various
types of chain motion that is introduced in an a priori sense (for example, the Rouse-type constraint
release motion; Sections 3.5.1 and 3.7.3). In other words, the models are not well connected to fundamental interactions of densely overlapping/interpenetrating chains that should self-consistently determine features of the “tube” and the chain motion therein. Attempts have been made to make this
connection, but further efforts are necessary.
Apart from specific problems of the generalized tube models explained in this article, e.g. effects of
contour length fluctuation on the chain diffusion (Sections 3.4.3 and 4.1.2) and explicit incorporation of
the (non-Rouse type) constraint release motion of the chains into the tube dilation models (Sections 4.4),
we note a subtle problem concerning the nematic interaction. In the linear viscoelastic regime,
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
1399
theoretical analyses indicate no significant effect of this interaction on the slow chain dynamics and
ensure the proportionality between the stress and orientational anisotropy for individual coarse-grained
submolecules (Section 2.2.2). In fact, the stress calculation in the molecular models explained in this
article is based on this proportionality. However, in the nonlinear regime, the same analyses do not rule
out a possibility that the nematic interaction affects the slow chain dynamics and the stress-anisotropy
proportionality vanishes for individual submolecules. It is desired to quantify these effects in the
nonlinear regime and incorporate them in the models, if necessary.
From the experimental side, it is an interesting challenge to synthesize polymers with various, well
characterized topological structures and examine their dynamic properties (Section 4.3). The information thus obtained, in particular in the nonlinear viscoelastic regime (Section 6), will enable us to further
refine our understanding for the effect of chain ends on the entanglement dynamics.
It is even more interesting and important to specify the motion of individual entanglement segments of
the chain through various experiments having high resolutions for this motion, for example, the rheooptical, diffusion, and dielectric experiments utilizing the chains appropriately labeled for respective
experiments. The responses detected in these experiments reflect differently averaged chain motion
(Section 2), and comparison of these responses can reveal detailed features of the chain motion. An
example, the comparison of the dielectric and viscoelastic properties, was demonstrated in this article
(Section 5.4). Further combination of other experimental techniques will certainly elucidate a new
aspect of the entanglement dynamics.
Acknowledgements
The author thanks R.G. Larson, W.W. Graessley, K. Osaki, and J. Takimoto for their invaluable
comments for this article. A support from Japan Chemical Innovation Institute (through the Doi Project
for development of Platform for designing high functional materials) for preparation of this article is
acknowledged.
References
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[12]
[13]
[14]
[15]
[16]
[17]
Ferry JD. Viscoelastic properties of polymers, vol. 3. New York: Wiley, 1980.
Graessley WW. Adv Polym Sci 1974;16:1–179.
Janeschitz-Kriegl H. Polymer melt rheology and flow birefringence. Berlin: Springer, 1983.
Rouse PE. J Chem Phys 1953;21:1272–80.
Zimm BH. J Chem Phys 1956;24:269–78.
Kraus G, Gruver JT. J Polym Sci Part A 1965;3:105–22.
Masuda T, Ohta Y, Onogi S. Macromolecules 1971;4:763–8.
Graessley WW, Masuda T, Roovers J, Hadjichristidis N. Macromolecules 1976;9:127–41.
Graessley WW, Roovers J. Macromolecules 1979;12:959–65.
Raju VR, Menezes EV, Marin G, Graessley WW, Fetters LJ. Macromolecules 1981;14:1668–76.
Hansen DR, Williams MC, Shen M. Macromolecules 1976;9:345–54.
Hong SD, Hansen DR, Williams MC, Shen M. J Polym Sci, Polym Phys Ed 1977;15:1869–83.
de Gennes PG. J Chem Phys 1971;55:572–9.
Doi M, Edwards SF. J Chem Soc Faraday Trans 2 1978;74:1789–801.
Doi M, Edwards SF. J Chem Soc Faraday Trans 2 1978;74:1802–17.
Doi M, Edwards SF. J Chem Soc Faraday Trans 2 1978;74:1818–32.
Doi M, Edwards SF. J Chem Soc Faraday Trans 2 1979;75:38–54.
1400
[18]
[19]
[20]
[21]
[22]
[23]
[24]
[25]
[26]
[27]
[28]
[29]
[30]
[31]
[32]
[33]
[34]
[35]
[36]
[37]
[38]
[39]
[40]
[41]
[42]
[43]
[44]
[45]
[46]
[47]
[48]
[49]
[50]
[51]
[52]
[53]
[54]
[55]
[56]
[57]
[58]
[59]
[60]
[61]
[62]
[63]
[64]
[65]
[66]
[67]
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
Doi M, Edwards SF. The theory of polymer dynamics. Oxford: Clarendon, 1986.
de Gennes PG. J Phys (Paris) 1975;36:1199–203.
Doi M, Kuzuu N. J Polym Sci, Polym Lett Ed 1980;18:775–80.
Pearson DS, Helfand E. Macromolecules 1984;17:888–95.
Ham JS. J Chem Phys 1957;26:625–33.
Bachus R, Kimmich R. Polymer 1983;24:964–70.
Fleischer G. Polym Bull 1984;11:75–80.
Antonietti M, Coutandin J, Sillescu H. Macromolecules 1986;19:793–8.
Green PF, Mills PJ, Palmstrom CJ, Mayer JW, Kramer EJ. Phys Rev Lett 1984;53:2145–8.
Green PF, Kramer EJ. Macromolecules 1986;19:1108–14.
Bartels CR, Crist B, Graessley WW. Macromolecules 1984;17:2702–8.
Crist B, Green PF, Jones RAL, Kramer EJ. Macromolecules 1989;22:2857–8.
von Seggern J, Klotz S, Cantow HJ. Macromolecules 1991;24:3300–3.
Pearson DS, Fetters LJ, Graessley WW, Strate GV, von Meerwall E. Macromolecules 1994;27:711–9.
Lodge TP. Phys Rev Lett 1999;83:3218–21.
Appel M, Fleischer G. Macromolecules 1993;26:5520–5.
Fleischer G, Appel M. Macromolecules 1995;28:7281–3.
Wheeler LM, Lodge TP. Macromolecules 1989;22:3399–408.
Nemoto N, Kojima T, Inoue T, Kishine M, Hirayama T, Kurata M. Macromolecules 1989;22:3793–8.
Nemoto N, Kishine M, Inoue T, Osaki K. Macromolecules 1990;23:659–64.
Nemoto N, Kishine M, Inoue T, Osaki K. Macromolecules 1991;24:1648–54.
Russell TP, Deline VR, Dozier WD, Felcher GD, Agrawal G, Wool RP, Mays JW. Nature 1993;365:235–7.
Klein J, Fletcher D, Fetters LJ. Nature 1983;304:526–7.
Bartels CR, Crist B, Fetters LJ, Graessley WW. Macromolecules 1986;19:785–93.
Antonietti M, Sillescu H. Macromolecules 1986;19:798–803.
Shull KR, Kramer EJ, Hadziiaounnou G, Antonietti M, Sillescu H. Macromolecules 1988;21:2578–80.
Shull KR, Kramer EJ, Fetters LJ. Nature 1990;345:790–1.
Rubinstein M. Phys Rev Lett 1986;57:3023–6.
Mills PJ, Mayer JE, Kramer EJ, Hadziiaounnou G, Lutz P, Strazielle C, Rempp P, Kovacs AJ. Macromolecules
1987;20:513–8.
Antonietti M, Sillescu H. Macromolecules 1985;18:1162–6.
Colby RH, Fetters LJ, Graessley WW. Macromolecules 1987;20:2226–37.
Toporowski PM, Roovers J. J Polym Sci, Polym Chem 1986;24:3009–19.
Carella JM, Gotro JT, Graessley WW. Macromolecules 1986;19:659–67.
Fetters LJ, Kiss AD, Pearson DS, Quack GF, Vitus FJ. Macromolecules 1993;26:647–54.
Roovers J. Macromolecules 1985;18:1359–61.
Roovers J. Macromolecules 1988;21:1517–21.
McKenna GB, Hadziiaounnou G, Lutz P, Hild G, Strazielle C, Straupe C, Rempp P, Kovacs AJ. Macromolecules
1987;20:498–512.
McKenna GB, Hostetter BJ, Hadjichristidis N, Fetters LJ, Plazek DJ. Macromolecules 1989;22:1834–52.
Roovers J, Graessley WW. Macromolecules 1981;14:766–73.
Roovers J, Toporowski PM. Macromolecules 1987;20:2300–6.
Matsumiya Y, Watanabe H, Sato T, Osaki K. J Soc Rheol Japan 1999;27:127–8.
Roovers J. Macromolecules 1984;17:1196–200.
Archer LA, Varshney SK. Macromolecules 1998;31:6348–55.
Tassin JF, Monnerie L, Fetters LJ. Macromolecules 1988;21:2404–12.
Lantman CW, Tassin JF, Monnerie L, Fetters LJ, Helfand E, Pearson DS. Macromolecules 1989;22:1184–8.
Tassin JF, Baschwitz A, Moise JY, Monnerie L. Macromolecules 1990;23:1879–81.
Kornfield J, Fuller G, Pearson DS. Macromolecules 1989;22:1334–45.
Ylitalo CM, Fuller GG, Abetz V, Stadler R, Pearson DS. Rheol Acta 1990;29:543–55.
Ylitalo CM, Kornfield J, Fuller G, Pearson DS. Macromolecules 1991;24:749–58.
Kornfield J, Fuller G, Pearson D. Macromolecules 1991;24:5429–41.
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
[68]
[69]
[70]
[71]
[72]
[73]
[74]
[75]
[76]
[77]
[78]
[79]
[80]
[81]
[82]
[83]
[84]
[85]
[86]
[87]
[88]
[89]
[90]
[91]
[92]
[93]
[94]
[95]
[96]
[97]
[98]
[99]
[100]
[101]
[102]
[103]
[104]
[105]
[106]
[107]
[108]
[109]
[110]
[111]
[112]
[113]
[114]
[115]
[116]
[117]
[118]
[119]
Watanabe H, Kotaka T. Macromolecules 1984;17:2316–25.
Watanabe H, Sakamoto T, Kotaka T. Macromolecules 1985;18:1008–15.
Watanabe H, Sakamoto T, Kotaka T. Macromolecules 1985;18:1436–42.
Watanabe H, Kotaka T. Macromolecules 1986;19:2520–4.
Watanabe H, Kotaka T. Macromolecules 1987;20:530–5.
Watanabe H, Kotaka T. Macromolecules 1987;20:535–43.
Watanabe H, Kotaka T. J Soc Rheol Japan 1987;15:48–55.
Watanabe H, Yamazaki M, Yoshida H, Kotaka T. Macromolecules 1991;24:5573–81.
Watanabe H, Yoshida H, Kotaka T. Macromolecules 1988;21:2175–87.
Yoshida H, Watanabe H, Kotaka T. Macromolecules 1991;24:572–7.
Watanabe H, Yoshida H, Kotaka T. Macromolecules 1992;25:2442–6.
Montfort JP, Marin G, Monge P. Macromolecules 1984;17:1551–60.
Montfort JP, Marin G, Monge P. Macromolecules 1986;19:1979–88.
Struglinski MJ, Graessley WW. Macromolecules 1985;18:2630–43.
Graessley WW, Struglinski MJ. Macromolecules 1986;19:1754–60.
Struglinski MJ, Graessley WW, Fetters LJ. Macromolecules 1988;21:783–9.
Roovers J. Macromolecules 1987;20:148–52.
Rubinstein M, Colby RH. J Chem Phys 1988;89:5291–306.
Osaki K, Kurata M. Macromolecules 1980;13:671–6.
Osaki K, Kimura S, Kurata M. J Polym Sci, Polym Phys Ed 1981;19:517–27.
Osaki K, Kimura S, Kimura M, Kurata M. J Rheol 1981;25:549–62.
Osaki K, Kimura S, Nishizawa K, Kurata M. Macromolecules 1981;14:455–6.
Osaki K, Nishizawa K, Kurata M. Macromolecules 1982;15:1068–71.
Osaki K, Takatori E, Kurata M, Watanabe H, Yoshida H, Kotaka T. Macromolecules 1990;23:4392–6.
Vrentas CM, Graessley WW. J Rheol 1982;26:359–71.
Osaki K. Rheol Acta 1993;32:429–37.
Adachi K, Kotaka T. Macromolecules 1984;17:120–2.
Adachi K, Kotaka T. Macromolecules 1985;18:466–72.
Adachi K, Okazaki H, Kotaka T. Macromolecules 1985;18:1687–92.
Adachi K, Kotaka T. Macromolecules 1987;20:2018–23.
Adachi K, Kotaka T. Macromolecules 1988;21:157–64.
Imanishi Y, Adachi K, Kotaka T. J Chem Phys 1988;89:7585–92.
Adachi K, Yoshida H, Fukui F, Kotaka T. Macromolecules 1990;23:3138–44.
Adachi K, Itoh S, Nishi I, Kotaka T. Macromolecules 1990;23:2554–9.
Adachi K, Kotaka T. Prog Polym Sci 1993;18:585–622.
Urakawa O, Adachi K, Kotaka T. Macromolecules 1993;26:2036–41.
Urakawa O, Adachi K, Kotaka T. Macromolecules 1993;26:2042–9.
Urakawa O, Adachi K, Kotaka T, Takemoto Y, Yasuda H. Macromolecules 1994;27:7410–4.
Adachi K, Wada T, Kawamoto T, Kotaka T. Macromolecules 1995;28:3588–96.
Boese D, Kramer F, Fetters LJ. Macromol Chem Rapid Commun 1988;9:367–71.
Boese D, Kramer F. Macromolecules 1990;23:829–35.
Boese D, Kramer F, Fetters LJ. Macromolecules 1990;23:1826–30.
Patel SS, Takahashi KM. Macromolecules 1992;25:4382–91.
Yoshida H, Adachi K, Watanabe H, Kotaka T. Polym J 1989;21:863–72.
Yoshida H, Watanabe H, Adachi K, Kotaka T. Macromolecules 1991;24:2981–5.
Watanabe H, Yamazaki M, Yoshida H, Adachi K, Kotaka T. Macromolecules 1991;24:5365–71.
Watanabe H, Yamazaki M, Yoshida H, Kotaka T. Macromolecules 1991;24:5372–9.
Watanabe H, Urakawa O, Kotaka T. Macromolecules 1993;26:5073–83.
Watanabe H, Urakawa O, Kotaka T. Macromolecules 1994;27:3525–36.
Watanabe H, Yamada H, Urakawa O. Macromolecules 1995;28:6443–53.
Watanabe H, Urakawa O, Yamada H, Yao M-L. Macromolecules 1996;29:755–63.
Watanabe H, Yao M-L, Osaki K. Macromolecules 1996;29:97–103.
1401
1402
[120]
[121]
[122]
[123]
[124]
[125]
[126]
[127]
[128]
[129]
[130]
[131]
[132]
[133]
[134]
[135]
[136]
[137]
[138]
[139]
[140]
[141]
[142]
[143]
[144]
[145]
[146]
[147]
[148]
[149]
[150]
[151]
[152]
[153]
[154]
[155]
[156]
[157]
[158]
[159]
[160]
[161]
[162]
[163]
[164]
[165]
[166]
[167]
[168]
[169]
[170]
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
Urakawa O, Watanabe H. Macromolecules 1997;30:652–4.
Matsumiya Y, Watanabe H, Osaki K, Yao M-L. Macromolecules 1998;31:7528–37.
Watanabe H, Matsumiya Y, Osaki K, Yao M-L. Macromolecules 1998;31:7538–45.
Higgins JS, Roots JE. J Chem Soc Faraday Trans 2 1985;81:757–67.
Richter D, Ewen B, Farago B, Wagner T. Phys Rev Lett 1989;62:2140–3.
Kolinski A, Skolnick J, Yaris R. J Chem Phys 1987;86:7164–73.
Kolinski A, Skolnick J, Yaris R. J Chem Phys 1987;86:7174–80.
Kremer K, Grest GS. J Chem Phys 1990;92:5057–86.
Ronca G. J Chem Phys 1983;79:1031–43.
Fixman M. J Chem Phys 1988;89:3892–911.
Fixman M. J Chem Phys 1988;89:3912–8.
Schweizer KS. J Chem Phys 1989;91:5802–21.
Schweizer KS. J Chem Phys 1989;91:5822–39.
Doi M. J Polym Sci, Polym Lett Ed 1981;19:265–73.
Doi M. J Polym Sci, Polym Phys Ed 1983;21:667–84.
Graessley WW. Adv Polym Sci 1982;47:68–117.
Lin YH. Macromolecules 1984;17:2846–56.
Rubinstein M, Helfand E, Pearson DS. Macromolecules 1987;20:822–9.
Klein J. Macromolecules 1978;11:852–8.
Daoud M, de Gennes PG. J Polym Sci, Polym Phys Ed 1979;17:1971–81.
Klein J. Macromolecules 1986;19:105–18.
Marrucci G. J Polym Sci, Polym Phys Ed 1985;23:159–77.
Doi M, Graessley WW, Helfand E, Pearson DS. Macromolecules 1987;20:1900–6.
Watanabe H, Tirrell M. Macromolecules 1989;22:927–39.
Viovy JL, Rubinstein M, Colby RH. Macromolecules 1991;24:3587–96.
Tuminello WH. Polym Engng Sci 1986;26:1339–47.
des J. Cloizeaux. Macromolecules 1990;23:3992–4006.
des J. Cloizeaux. Macromolecules 1990;23:4678–87.
Tsenoglou C. Macromolecules 1991;24:1762–7.
Mead DW. J Rheol 1994;38:1797–827.
Mead DW. J Rheol 1996;40:633–61.
Milner ST. J Rheol 1996;40:303–15.
Milner ST, McLeish TCB. Phys Rev Lett 1998;81:725–8.
Ball RC, McLeish TCB. Macromolecules 1989;22:1911–3.
Milner ST, McLeish TCB. Macromolecules 1997;30:2159–66.
Milner ST, McLeish TCB. Macromolecules 1998;31:7479–82.
Milner ST, McLeish TCB, Young RN, Hakiki A, Johnson JM. Macromolecules 1998;31:9345–53.
Levine AJ, Milner ST. Macromolecules 1998;31:8623–37.
McLeish TCB. Macromolecules 1988;21:1062–70.
Bick DK, McLeish TCB. Phys Rev Lett 1996;76:2587–90.
McLeish TCB, Larson RG. J Rheol 1998;42:81–110.
Pearson DS, Kiss AD, Fetters LJ, Doi M. J Rheol 1989;33:517–39.
Pearson DS, Herbolzheimer E, Grizzuti N, Marrucci G. J Polym Sci Part B, Polym Phys 1991;29:1589–97.
Marrucci G. J Non-Newtonian Fluid Mech 1996;62:279–89.
Ianniruberto G, Marrucci G. J Non-Newtonian Fluid Mech 1996;65:241–6.
Mead DW, Larson RG, Doi M. Macromolecules 1998;31:7895–914.
Mead DW, Van Dyke TJ, Chen HW, Doi M, Larson RG. Application of binary interaction theory to polydisperse star and
linear polymers, part I: linear viscoelasticity. Manuscript in preparation.
Jarry JP, Monnerie L. Macromolecules 1979;12:316–20.
Doi M, Pearson DS, Kornfield J, Fuller G. Macromolecules 1989;22:1488–90.
Watanabe H, Kotaka T, Tirrell M. Macromolecules 1991;24:201–8.
Doi M, Watanabe H. Macromolecules 1991;24:740–4.
H. Watanabe / Prog. Polym. Sci. 24 (1999) 1253–1403
[171]
[172]
[173]
[174]
[175]
[176]
[177]
[178]
[179]
[180]
[181]
[182]
[183]
[184]
[185]
[186]
[187]
[188]
[189]
[190]
[191]
[192]
[193]
[194]
[195]
[196]
[197]
[198]
[199]
[200]
[201]
[202]
[203]
[204]
[205]
[206]
[207]
[208]
[209]
[210]
[211]
[212]
[213]
[214]
[215]
[216]
[217]
[218]
1403
Inoue T, Okamoto H, Osaki K. Macromolecules 1991;24:5670–5.
Inoue T, Osaki K. Macromolecules 1996;29:1595–9.
Inoue T, Onogi T, Yao ML, Osaki K. J Polym Sci Part B, Polym Phys 1999;37:389–97.
Cole RH. J Chem Phys 1965;42:637–43.
Stockmayer WH. Pure Appl Chem 1967;15:539–54.
Larson RG. Constitutive equations for polymer melts and solutions. Boston: Butterworth, 1988.
Graessley WW. J Polym Sci, Polym Phys Ed 1980;18:27–34.
Doi M. J Polym Sci, Polym Phys Ed 1980;18:2055–67.
Bernstein B, Kearsley EA, Zapas LJ. Trans Soc Rheol 1963;7:391–410.
Deutsch JM, Madden TL. J Chem Phys 1989;91:3252–7.
Watanabe H, Yoshida H, Kotaka T. Polym J 1990;22:153–61.
de Gennes PG. Macromolecules 1986;19:1245–9.
Matsumiya Y, Watanabe H, Osaki K. Comparison of dielectric and viscoelastic relaxation functions of cis-polyisoprenes: test of tube dilation molecular picture. Macromolecules, in press.
Colby RH, Rubinstein M. Macromolecules 1990;23:2753–6.
Wasserman SH, Graessley WW. J Rheol 1992;36:543–72.
Fetters LJ, Lohse DJ, Richter D, Witten TA, Zirkel A. Macromolecules 1994;27:4639–47.
Schausberger A, Schindlauer G, Janeschitz-Kriegl H. Rheol Acta 1985;24:220–7.
Baumgaertel M, Schausberger A, Winter HH. Rheol Acta 1990;29:400–8.
Baumgaertel M, De Rosa ME, Machado J, Masse M, Winter HH. Rheol Acta 1992;31:75–82.
Kan HC, Ferry JD, Fetters LJ. Macromolecules 1980;13:1571–7.
Graessley WW. Macromolecules 1982;15:1164–7.
Green PF, Mills PJ, Kramer EJ. Polymer 1986;27:1063–6.
Matsuoka S. Relaxation phenomena in polymers. New York: Hanser, 1992.
Fukuda M, Osaki K, Kurata M. J Polym Sci, Polym Phys Ed 1975;13:1563–76.
Takatori E, Osaki K, Kurata M, Hirayama T. J Soc Rheol Japan 1988;16:99–103.
Marrucci G, Grizzuti N. J Rheol 1983;27:433–50.
Archer LA, Chen L-Y, Larson RG. J Rheol 1995;39:519–25.
Penwell RC, Graessley WW, Kovacs AJ. J Polym Sci, Polym Phys Ed 1974;12:1771–83.
Graessley WW. J Chem Phys 1967;47:1942–53.
Menezes EV, Graessley WW. J Polym Sci, Polym Phys Ed 1982;20:1817–33.
Meissner J. Rheol Acta 1971;10:230–42.
Laun HM, Münstedt H. Rheol Acta 1978;17:415–25.
Münstedt H. J Rheol 1980;24:847–67.
Münstedt H, Laun HM. Rheol Acta 1981;20:211–21.
Laun HM, Schuch H. J Rheol 1989;33:119–75.
Phan-Thien N. J Rheol 1978;22:259–83.
Leonov AI. Rheol Acta 1976;15:85–98.
Giesekus H. J Non-Newtonian Fluid Mech 1982;11:69–109.
Larson RG. J Rheol 1984;28:545–71.
Wagner MH. Rheol Acta 1976;15:133–42.
Wagner MH, Raible T, Meissner J. Rheol Acta 1979;18:427–8.
Laun HM. Rheol Acta 1978;17:1–15.
Soskey PR, Winter HH. J Rheol 1984;28:625–45.
Soskey PR, Winter HH. J Rheol 1985;29:493–517.
Papanastasiou AC, Scriven LE, Macosko CW. J Rheol 1983;27:387–410.
Kasehagen LJ, Macosko CW. J Rheol 1998;42:1303–27.
Samurkas T, Larson RG, Dealy JM. J Rheol 1989;33:559–78.
Wagner MH, Demarmels A. J Rheol 1990;34:943–58.