OWI-535 Robotic Arm Edge Manual
advertisement

ll:
FEB.21200ff
Assembly ond lnstrucfion Monu<rl
For SAFETY during Assembly
To safelyassembleand usethis robot,
pleasebe carefulof the followingpoints:
O Readthe instructionmanualthoroughlyand be sure that
you understandit beforebeginningassembly.Followthe
instructionscarefullyto ensurecorrectassembly.
O Exercisesufficientcarewhen usingtools.
OTo providethe requiredfunctions,some kit partsmay be
small,havesharpedges,or be madeof metalor glass.
Partsshouldbe handledcarefullyaroundsmallchildren
to preventthemfrom puttingthe partsin their mouthor
injuringthemselveswith the parts.lf a childswallowsa
partor bag,consulta doctorimmediately.
Also,be sure
to tear the bagswhichcontainsthe partsand discard
themwherethey cannotbe reachedby children.
O Followthe instructionsregardingheat dispersionfor parts
whichgenerateheat.
OAssemblethe kit accordingto the instructionsin this
manual.
Attemptingto changethe productspecifications(pressure
resistance,electriccurrent,etc.)from thosespecifiedby
this companyat the time of designmay resultin
malfunction
or an accident.
O nOeOTlC ARM EDGEspecifications,
shape ,etc.are
subjectto changewithoutnotice.
Additional cautions regarding ROBOTICARM EDGE
OWhen using batteries,pleasebe carefulof the
followingpoints:
1.
terminals
Insertbatterieswith the polarity(+7-;
positionedcorrectly
2.
Do not short-circuitbatteryterminals,disassemble
batteries,applyheatto them,or discardthem in fire.
liquidleakage,
Doingso may resultin heatgeneration,
or explosion.
3.
After use, be sure to removethe batteries.
4.
Keep batteriesand the batteryholderfrom gettingwet.
lf they get wet, removethe batteriesand wipe the
batteriesand batteryholderdry with a cloth.
ELPFUL HINTS Before ASSEM
fCutting of parts
Use a penknifeto cut small parts off the
runners.Cut the parts so that burrs remain
on the parts,and then file off the burrs
from the small parts after cuttingthem free
off the runners.
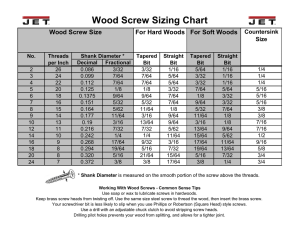
f Using tapping screws
tapping screws, like wood screws,can cut
threads in the materialsthey are screwed
into at the same time as they fasten parts
to that material.
lf you tighten a tapping screw in one
motion,it will become hard to turn the
screw at a certain point, it may become
impossibleto fully tightenthe screw, and
the screw head may break. A better way is
to tightenthe screw until it becomes
difficultto tighten further,then loosenthe
screw slightlybefore retighteningit further.
Repeatthis actionseveraltimesuntilthe
screw is completelytightened.
f lgntening of screws and nuts
lf screws and nuts are not tightened
sufficiently,they may loosenwhen
ROBOTICARM EDGE is operated,
resultingin parts fallingoff during
operation.On the other hand,
overtighteningmay cause parts to become
warped, making movementdifficult,or in
the worst cases, impossible.Tighten
screws and nuts sufficiently,but without
overtightening.
a. A good way of
tightening the
tapping screws
1. Screw in.
2. Looseena little.
3. Screw in again.
""-p
f MecnanicalParts List
Parts requiredfor assemblyare maintainedin the
mechanicalparts list. This will help identifyparts in the
assemblyprocess.
Nuts
Contents
ROBOTIC
ARM EDGE:
1. ProductIntroduction
P.1
2. ToolsYouMayNeed
P.1
PartsList
3. Mechanical
P.2
4. PlasticParts
P.3
5. MechanicalAssembly
P.5
WiredControl Box:
.. .
1. Product
Introduction
.-.-. p.z7
2. ToolsYouMayNeed
..' p.27
3. Mechanical
PartsList
. p.2T
4. Pfastic
Parts
5. MechanicalAssembly
How it Works
. ... p.z8
. p.2A
p.31
TroubleShooting
.. p.33
CircuitDiagram
.. . p.33
AfiAM
I
I
Wth RoboticArm
Edge,commandthe gripperto
openand close,wristmotionof 120degrees,an
extensiveelbowrangeof 300degrees,baserotation
of 270 degrees,basemotionof 180degrees,
verticalreachof 15 inches,horizontalreachof
12.6inches,andliftingcapacityof 1009.
WOW! Someof the addedfeaturesincludea
searchlightdesignon the gripperand a safetygear
audibleindicator
is includedon allfivegearboxes
to preventany potentialinjuryor gearbreakage
duringoperation.
Maximumlift: 1009.
D i m e n s i o n s : 9 " Lx 6 . 3 " W x 1 5 " H
Weighfi 558 g
{
Powersource required:
4 x"D" batteries(not
included)
F
ErlESl=
OuQutGearl0Tffilte)
,-s)
{?E
-N K-
sl
g
2..
nltK1:1
tt,| Tappngscrrwwrth
E
S4rcherAttached
TF" ?F
1:1
Qtv
1 '.1
il'E
12
(2,6x0)
iqtl
-NK2.6
t.l
1:'l
Screw
ifl SerTapping
?s
(DE
Nut
E
Qty
r|l
I
I!gE
tl
-N"K-
,?'t
2
3
(3x16)
Qty
G
16
Battery Terminal
With Wire
x2
o
@
c
c
l#At
v:v
l)
eearOoxAssembly
ForM4. M5
mfi
V
W
Pl 8x4
vr
I
(9
a
P5
(Brown)
.[,r[to
fi
P6
ffi
(Blue)
l
+
5
P1x2
G)
i
n#fu
f(
_=,\-
./"€t\
V^'
P13x{
Orange
- Black
x2
6
f;)
OearUoxAssembly
ForM3
\1
0e
YY
ti
o
P4
(Gray)
t_
5'*t'
,
i
: ,"""1'-..
|
i5o?r"Ftrnd
-W&Lp+
inf*
rAl
P9x2
PE(Brown
)
-]il
a
tt
il
UI:
,affi
ll ll
tl
.--
i
i
i
(Gray)
i,
i
i
'"""--i,
Blue)
+
,.
j'./
7
.{ ..."'-""-.-".'-"-"'i
P2x1
,ii
i.l
tni/,
_ .._
t
"'/
, lt,
' ,* l i
' ,,. ti
li
r
;:
r
6
rr\nF+++
,""-(
ii
-,/
)i
,t'
X1
I
ii
\ili
vt"
-f
P13x3
(M3)
ii
I
GearboxAssembly
ForM2
mm
V
P18x4
W
@
(E
, -i-
P,s(Brown
P5
(Brown)
P8
-'-1"" (White
/r i'il
[w,
\n_-_./
i
P6
ffi
l
(Blue)
+
ffi
ffi
\--rir--.7
I
Or'
Btack-\
Blue-
1- "
I
i
i
'<\ \ . { n\, i:
-.1*
I
i
*$Ygkr I!
qDr,(*l.,-
P2x1
er3x3-f
Black
X1
(M2)
10
s l D Ev t E w
11
e
(\l
et
@
|8d
sr
r
hP14
->
li
vii
;:
Y
ii :
it
i,
I
* ?.-
ri
: I
!l
ii
P15x2
P1ex2
YI
tl
,'
.l
I
"af r:-6
;
i ii
:: il
.+r
'
3
,/,
,.. r < .
l-l l'.'rt: 1 : r ,
: '
:iili
i
I
i:
i
I
. ;. i; i
/
-
''l'j'.,-,
i: :i
l1
;9-
i:
is
i-
/:-
'
.-l':".
ii
ii
il ii
,i ti
i; ii
I
i
i
.:r','.
i
"
-".\
ii
i!
i -{,
i'
--(: r,: ' , , ' ' '
ll
14
i
I
ii
ni
l-
P12xa
Pl 5x8
M3
M2
whi
Black
15
?--
P13
M
@
i
.:'
,i' ,.:"
i'
16
@
GearboxAssembly
ForGripper( Ml )
a:'
v
P7(Black)
l-
17
@
@
8-
|8d
e
18
ptt*a
zz
(D
9Z
lcnpordpor,lslulJ@
Wired Control
Usingfive leversto controltheRoboticArmEdge
movesup and down,left and right,anotheron-off
switchto controlthesearchlight.
Connectwithmainunitby a 100cmflatcable.
e
nK3
l:l
27
Box
28
a
o
A1
@
O wiring
O
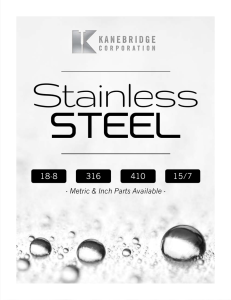
FinishedProduct
M3:ElbowMotion
M2:WristMotion
M1:Gripper
SearchLight
M4:BaseMotion
M5:BaseRotation
30
1. Pushany leveron the wiredcontrollerto startoperation.
2.The different12 movements
of the RoboticArmEdgeas shownbelow:
++
=C,'
=C= +
31
3.Workingarea:
4. All the fivegearboxesequippedwithsafetygear,whenthe armopen, close,up or
lowerto the maximumposition,and userkeepspushingthe buttons,the safety
gear willstartto workto protectthe gearboxandmake'da,da,da...'sound.
5. To extendthe lifeof gearbox,releasethe buttonsonceyou hearthe safetygear
emit 'da,da,da'sound.
1. Ensureallwiringsarecorrect.(Please
refer0@on page23,24)
please
2. lf the RoboticArmEdgedoesnot haveany responseto the wiredcontroller,
checkif the 'BATTERY'
and 'GND'connectorsare in rightposition,and alsoif the
batteriesare placedin correctpolarity.(Please
refer(Donpage13 )
3. lf the RoboticArm Edgemoveswrongdirection,pleasecheckif wiringof Ml , M2,
M3,M4,M5 are reversed.(Please
referO@on page23,24)
4. lf the searchlight
doesnot light,pleasecheckif the 'L' connectoris correct.
(Pleaserefer(D(Eonpage23,24)
Wired Control Box
RoboticArm Edge
33