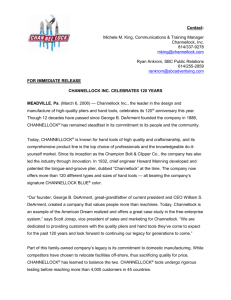
The following figure shows a pair of pliers that consists of an upper
advertisement

E14 Lab 3 Prof. Paul Mitiguy Spring 2007-2008 Page 1/4 Model: The following figure shows a pair of pliers that consists of an upper rigid handle HU, a lower rigid handle HL, an upper rigid jaw JU, and a lower rigid jaw JL. Note: Since the applied load and the pair of pliers are both symmetric, the forces on the lower jaw are symmetric to the forces on the upper jaw. Frictionless revolute joints connect: • HU and HL at point C • HU and JL at point E • HL and JU at point B Frictionless slider joints connect: • HU and JU at point A • HL and JL at point D The weight of the pliers is negligible as compared to the magnitude of the forces applied by human hands and the forces applied to the sensor. We model the pliers as gripping an object without pulling in the Nx direction. As a result, the hands forces and the jaw forces are in the Ny direction only. E14 Lab 3 Prof. Paul Mitiguy Spring 2007-2008 Page 2/4 Identifiers: To facilitate this analysis, right-handed orthogonal unit vectors Nx, Ny, Nz are fixed in both JU and JL with Nx directed from A to B (or equivalently D to E), Ny directed from D to A (or equivalently from E to B), and Nz parallel to all the pliers’ revolute joint axes. Description Nx measure of the position vector from S to D (or from R to A) Nx measure of the position vector from D to C (or from A to C) Nx measure of the position vector from C to B (or from C to E) Nx measure of the position vector from B to Q (or from E to Q) Nx measure of the Hand Force applied at R -Ny measure of the Hand Force applied at R Nx measure of the Hand Force applied at S Ny measure of the Hand Force applied at S Ny measure of the force from the sensor on the upper Jaw Ny measure of the force from the sensor on the lower Jaw Nx measure of the Reaction Force at B Ny measure of the Reaction Force at B Nx measure of the Reaction Force at C Ny measure of the Reaction Force at C Nx measure of the Reaction Force at E Ny measure of the Reaction Force at E Ny measure of the Reaction Force at A Ny measure of the Reaction Force at D Symbol a b c d Rx Ry Sx Sy JUy JLy Bx By Cx Cy Ex Ey Ay Dy Type Constant Constant Constant Constant Variable Variable Variable Variable Specified Specified Variable Variable Variable Variable Variable Variable Variable Variable Physics: To analyze the pliers, we will use four free-body diagrams (four systems). Value 70 mm 25 mm 25 mm 20 mm s E14 Lab 3 Prof. Paul Mitiguy Spring 2007-2008 Page 3/4 Draw the external contact and distance forces for the following four diagrams. Simplify and Solve: Calculate the pliers’ mechanical advantage |JUy| / |Ry| = (a+b)*(b+c)/(b*d-c*(b+c+d)) Note: Please pass-in your calculations (feel free to use Autolev, Matlab, or other programs). Result: Mechanical Advantage = Output Force applied by the plier ' s jaws to the force sensor Input Force applied by human hands to the plier ' s handles = ( a + b )( b + c ) bd − c ( b + c + d ) E14 Lab 3 Prof. Paul Mitiguy Spring 2007-2008 Page 4/4 Interpret and Design: Using Matlab, Alplot (installed with Autolev), Excel, or a similar graphing package,1 create four graphs, one for each of Ry vs. a, b, c, d, respectively. For the first graph,use the measured values for b, c, d. For the second graph, use the measured values for a, c, d. Similarly, create the third and fourth graphs. Vary the independent variable from 15 to 25 mm. When a = 70 mm and d = 20 mm, the mechanical advantage is a function of b and c as shown to the right. Find the values of b and c that maximize the pliers’ mechanical advantage and determine its maximum. Result: b = ____ mm c = ____ mm Max Mechanical Advantage = ____ 1 Links to tutorials for the graphing and software programs are on the class website.