zzaag3 V2 Controller motor left motor right red blk - fun
advertisement

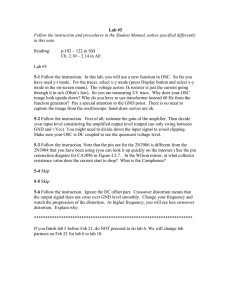
- 1 – F:\daten\office\qm\doks manuells\zzaag3 V2 controller.doc zzaag3 V2 Controller motor left red blk motor right blk red GND +24V 1 2 3 4 5 PCB-Connector Pin Pin Pin Pin Pin 1 2 3 4 5 black brown red orange yellow SW POTI VCC GND GND POTY – Potentiometer SW - Footswitch (opener) Controller should be mounted upside down! - 2 – F:\daten\office\qm\doks manuells\zzaag3 V2 controller.doc ISP-Port 1 2 3 4 5 6 - 3 5 2 4 6 MISO VC RST GND MOSI SCK Error Blink-Codes Interval 1x 2x 4x 5x 1 (green LED off, red flashing) Meaning low Batterie (<23 Volt) ADXL-325 wrong Data IDG-500 wrong Data IDG-500 wrong Data Batterie charging Information green LED on on on red Led off red flashes on Meaning Batt. 100% Batt <50% Batt.<20% - 3 – F:\daten\office\qm\doks manuells\zzaag3 V2 controller.doc Firmware zzaag3 V1 Steering Calibration After Power on, the firmware measures the steering Poti and store the value to rocker_zero. So held the handlebar straight up whilst powering. Gyro Calibration After pushing the footswitch the zero-Angle is detected by the adxl and stored to the adxl_zero var. So held the platform horizontally whilst pushing the footswitch. Safety Concept To avoid unmanned driving, the zzaag firmware turns off the motors after a period of 1 sec. If the footswitch is not pressed. This emergency stop is indicated by a sound that is generated through the Motor PWM-Signal. Speed Limit If the speed limit is reached, the zzaag generates an acceleration Pulse that pushes the driver a little bit back and slow down the drive.