Root Locus Review - University of Nevada, Reno
advertisement

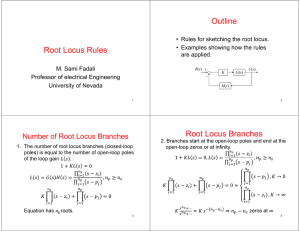
Outline • • • • Root Locus Review M. Sami Fadali Professor Electrical Engineering University of Nevada, Reno What is the root locus? Rules for sketching root loci. Examples MATLAB 1 The Root Locus What is Required? • Closed-loop characteristic equation • Gain 2 • Determine the loci of the closed-loop poles (root loci) as varies between and . • Complex equality gives two real equalities: i) Magnitude Condition ii) Angle Condition is a design parameter is the loop gain = open-loop system zeros = open-loop system poles • Use magnitude and angle conditions to derive rules for sketching the root locus. 3 4 Rules For Sketching Root Loci Root Loci (Cont.) 1. Number of root locus branches=number of open-loop poles of 2. Root locus branches start at open-loop poles and end at open-loop zeros or at . 3. Real axis root loci have an odd number of poles plus zeros to their right. 4. Branches going to asymptotically approach the straight lines 2 1 180° , 0,1,2, … , ∑ 5. maxima at breakaway points (departure from real axis), minima at breakin points (arrival at real axis). 6. Angle of departure from a complex pole (similarly angle of arrival at complex zeros) ∑ 5 6 Solution (i) Example 5.1 Sketch the root locus plots for the transfer functions. Comment on the effect of adding a pole or a zero to the loop gain. 7 • Obtain root locus using MATLAB. • Rule 1: two root locus branches. • Rule 2: branches start at (1) and ( 3) and go to . • Rule 3: real-axis locus is between ( 1) and ( 3). • Rule 4 gives the asymptotes 8 Solution (i) (i) RL of 2nd Order System Rule 5: Breakaway point • Characteristic equation • Breakaway point at a maximum for , . second derivative • For any system with two real axis poles, the breakaway point is midway between the two poles. 9 Solution (ii) 10 (ii) Rule 5: Breakaway Point • Rule 1: 3 root locus branches. • Rule 2: each branch starts at an open loop poles (1, 3, 5). • Rule 3: real-axis loci are between 1 and 3 and to the left of 5. All branches go to . One branch remains on the negative real axis and the other two break away. breakaway point (on real axis locus between poles at (1) and (3)) 4.155 corresponds to a negative gain (inadmissible). Gain at the breakaway point (magnitude condition) 11 12 (ii) Intersection With j-axis (ii) Asymptotes • Closed-loop characteristic equation: • Angle: • Routh table • Intercept: 13 (ii) RL of 3rd Order System • Auxiliary Equation: • Intersection with j-axis: rad/s. 14 (iii) Solution • Rule 1: 2 root locus branches. • Rule 2: each branch starts at an open loop pole (1, 3). One branch goes to and the other goes to the zero ( 5). 15 16 (iii) Rule 5: Breakaway/Breakin (iii) Breakaway/Breakin 2.172 = breakaway (between open-loop poles) 7.828 = breakin point (to left of zero) • 2nd derivative: negative for 2.172 and positive for 7.828 • K maximum at 2.172 and minimum at 7.828 • Rule: root locus is a circle centered at zero with radius = geometric mean of the distances between the zero and the two real poles. 17 (iii) RL of 2nd Order System with Zero 18 Root Locus Using MATLAB » g=tf([1,5],[1,2,10]) % Transfer function » rlocus(g) % Root locus. Click mouse at a point on root locus to obtain the corresponding gain, pole locations, and time response information. 19 20