Outline
Frequency Domain Specs
• Frequency response criteria.
– PM
– GM
– Resonance peak.
M. Sami Fadali
Professor EBME
UNR
1
Gain and Phase Margins
2
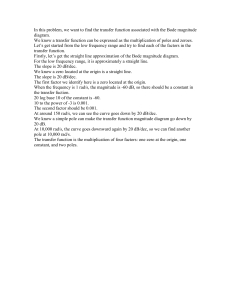
Margins on Polar Plot
Gain Margin: gain perturbation that makes
the system marginally stable.
Phase Margin: negative phase perturbation
that makes the system marginally stable
3
4
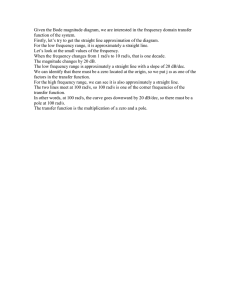
Margins on Bode Plot
MATLAB
>> bode(g)
>> g=zpk([], [0,-2,-10], 20);
>> nyquist(g)
Magnitude (dB)
Nyquist Diagram
10
System: g
Gain Margin (dB): 21.6
At frequency (rad/s): 4.47
Closed Loop Stable? Yes
System: g
Phase Margin (deg): 60.4
Delay Margin (sec): 1.16
At frequency (rad/s): 0.907
Closed Loop Stable? Yes
-5
-0.9
-0.8
-0.7
-0.6
-0.5
Real Axis
-0.4
0
-50
-100
-135
-0.3
-0.2
System: g
Gain Margin (dB): 21.6
At frequency (rad/s): 4.47
Closed Loop Stable? Yes
-150
-90
0
Phase (deg)
Imaginary Axis
5
-10
-1
Bode Diagram
50
-0.1
0
5
Margin Command
-180
System: g
Phase Margin (deg): 60.4
Delay Margin (sec): 1.16
At frequency (rad/s): 0.907
Closed Loop Stable? Yes
-225
-270
-1
10
10
0
1
10
Frequency (rad/s)
10
2
10
3
6
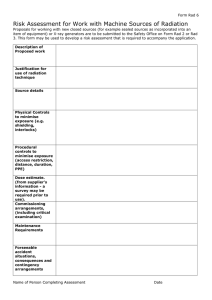
Relative Stability
>> margin(g)
Magnitude (dB)
50
• Phase margin PM and gain margin GM are
measures of relative stability.
• PM should be between 30 and 60
• GM should be greater that 6 dBs (2)
• PM of 60 corresponds to a damping ratio of 0.6
for a 2nd order underdamped system
, related to and hence to the OS%
• PM
Bode Diagram
Gm = 21.6 dB (at 4.47 rad/s) , Pm = 60.4 deg (at 0.907 rad/s)
0
-50
-100
Phase (deg)
-150
-90
-135
-180
-225
-270
-1
10
10
0
1
10
Frequency (rad/s)
10
2
10
3
7
8
Speed of Response
Resonant Peak
• The speed of response of the system increases
with bandwidth.
• The gain crossover frequency increases with
bandwidth (from open-loop frequency response).
• The peak frequency increases with speed of
response.
• Peak overshoot of step response increases
with the resonant peak while decreases.
• Relative stability measure.
• The higher the peak the less stable the system.
•
should be between 1 and 1.4 for
between 0.707 and 0.4 (no peak for
)
9
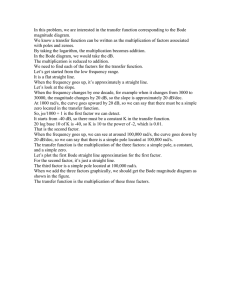
Closed-loop Bode
Compromise in Design
>> s=tf('s'); g=10/(s^2+2*s+10)
System: g
Bode Diagram
Peak gain (dB): 4.44
At frequency (rad/s): 2.83
10
0
System: g
Frequency (rad/s): 4.56
Magnitude (dB): -3
Magnitude (dB)
-10
-20
Right click and
select Show.
Uncheck phase.
-30
-40
-50
-60 -1
10
0
10
10
Frequency (rad/s)
1
10
10
2
11
• Often, increasing the gain to reduce the
steady-state error results in reduced relative
stability (smaller GM and PM).
• Increasing the gain often speeds up the
response (increases BW)
• The final design must be a compromise
between the different measures of
performance.
12
 0
0