Modeling of Multiple FACTS Controllers for
advertisement

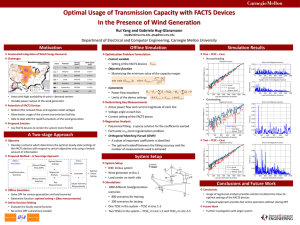
INDIAN INSTITUTE OF TECHNOLOGY, KHARAGPUR 721302, DECEMBER 27-29, 2002 421 Modeling of Multiple FACTS Controllers for Multimachine Power System, A Modular Approach Nikhlesh Kumar Sharma, Arindam Ghosh, and Rajiv K. Varma Abstract-- This paper presents a systematic modular approach of modeling multiple FACTS devices in multimachine power system environment using power balance form. In particular, two key FACTS devices, viz., SVC, TCSC and their combination are modeled and incorporated in the multimachine DAE (Differential Algebraic Equations) model of the power system. The models developed are modular and flexible in nature and any type of associate control can be added with these FACTS devices. The models developed have been utilized for eigenvalue analysis of a 9-bus power system. Index Terms—DAE, Eigenvalue analysis, SVC,TCSC. 1. models developed have been utilized for eigenvalue analysis of 9-bus power system. II. DAE MODEL OF MULTIMACHINE POWER SYSTEM WITHOUT FACTS CONTROLLERS The methodology given in [1] describes dynamic modeling of a general m-machine, n-bus system. This model represents each machine by a two -axis model and the excitation system is chosen as the IEEE type-I rotating exciter. The transmission system has been modeled by static equations. DAE model utilizes power balance form. The equations are written as INTRODUCTION A study of the implication of adding various FACTS Controllers in multimachine environment requires an appropriate mathematical model of the system and the FACTS Controllers. There are many commercial packages available for transient simulation and analysis of power systems. The transient simulation packages (e.g. EMTDC/PSCAD) allow incorporation of FACTS Controller models. This facility is however not available in the small signal stability analysis packages. The objective of this paper is to develop a methodology to incorporate FACTS Controllers in a modular fashion to facilitate eigenvalue and voltage stability analysis using MATLAB. The DAE (Differential Algebraic Equation) methodology for multimachine system has been presented in [1] is used in this paper. Even tough the SVC model has been incorporated in DAE model [2], the other FACTS Controllers and their combinations have not been incorporated. So the purpose of this paper is to derive models of various FACTS Controllers such that these can be incorporated in DAE model. Further in a large power system there may be more than one FACTS Controllers, therefore it is important to develop a combination of series and shunt FACTS Controllers that can be incorporated in the DAE model in modular fashion. The Nikhlesh Kumar Sharma is Lecturer in Electrical Engg. Deptt., Madan Mohan Malaviya Engineering College, Gorakhpur, UP, India. (telephone: 0551-273500, e-mail: nikhlesh@mailcity.com). Arindam Ghosh is Professor of Electrical Engg at Indian Institute of Technology, Kanpur, UP, India. (telephone: 0512-598799, e-mail: aghosh@iitk.ac.in). Rajiv K. Varma is Associate Professor of Electrical & Computer Engineering at University of Western Ontario London, Ontario, Canada x& = f ( x, y , u) x (0) = xo (1) 0 = g (x , y , u ) y (0) = y o (2) where x is a vector of state variables, y is vector of algebraic variables and u is a vector of inputs and parameters. Equation (1) consists of the differential equations of the mechanical system, field winding, q-axis damper winding, and the electrical equations of the exciter. Equation (2) consists of the stator algebraic equations and the network power balance equations. Various vectors are defined as ′ , E fdi , V Ri , R Fi ] x = [δ i , ω i , E qi′ , E di T T y = [V j ,θ j , I di , I qi ] T u = [TMi , V REFi , PLj , Q Lj ] i = 1, KK ; j = 1, K K , n (3) (4) Based on the methodology described in [1], the linearized model is shown in (5). ∆X& 0 = 0 (5) A1mod K 2 G1 A2 new K 1new D1new A3new ∆X E C 4new ∆z + 0 ∆U D2new ∆v 0 422 NATIONAL POWER SYSTEMS CONFERENCE, NPSC 2002 where D2 new is the load flow Jacobian J LF and K J AE = 1new D1new C 4 new is the algebraic Jacobian. D 2new The vectors [∆zT] and [∆v T] are T ∆z = [∆θ 1 , ∆V1 , K K , ∆Vm ] base MVA is 100, and system frequency is 60 Hz. Table 1 shows the eigenvalues of WSCC system. Column 1 of Table 1 shows the eigenvalues reported in [1] while column 2 depicts the eigenvalues obtained from developed MATLAB program. It is evident that eigenvalues obtained from developed MATLAB program correlate very well with those reported in [1]. This validates the developed MATLAB program. Table 1 Eigenvalues of WSCC system T ∆v = [∆θ 2 , ∆θ 3 ,KK, ∆θ n , ∆Vm +1,K, ∆Vn ] The system matrix Asys can be obtained as ∆X& = Asys ∆X + E ∆U where Asys = A1mod − [A2 new A3new ][ J AE ] −1 K 2 G 1 The details of DAE model are given in [1]. This DAE model for multimachine system can be used for studying steady state stability, voltage stability and low frequency electromechanical oscillations. Based on this methodology, a small signal stability program has been developed using MATLAB. III. INCORPORATION OF SVC IN MULTIMACHINE MODEL In its simplest form SVC is composed of FC-TCR configuration as shown in Fig. 2. The SVC is connected to a coupling transformer that is connected directly to the ac bus whose voltage is to be regulated. The effective reactance of the FC-TCR is varied by firing angle control of the thyristors. The firing angle can be controlled through a PI controller in such a way that the voltage of the bus where the SVC is connected is maintained at the desired reference value. Fig.1. Three machine 9-bus system Fig. 2. Simplified one line diagram of SVC In order to ensure that the developed small signal stability program gives satisfactory results, eigenvalue analysis is performed for the Western System Coordinating Council (WSCC) 9-bus system (Fig. 1). This WSCC system comprises three generators and nine buses. Loads are connected at buses 5, 6 and 8 as shown in Fig. 1. At base case loading condition of the system, the generator 2 and 3 are supplying 163MW and 85MW power respectively. The The incorporation of the SVC into DAE model of multimachine system is done on the same lines as explained in [2]. Table 2 shows the eigenvalues reported in [2] and from developed MATLAB program. IV. THYRISTOR CONTROLLED SERIES CAPACITOR INDIAN INSTITUTE OF TECHNOLOGY, KHARAGPUR 721302, DECEMBER 27-29, 2002 Thyristor Controlled Series Capacitor (TCSC) provides powerful means of controlling and increasing po wer transfer level of a system by varying the apparent impedance of a specific transmission line. A TCSC can be utilized in a planned way for contingencies to enhance power system stability. Using TCSC, it is possible to operate stably at power levels well beyond those for which the system was originally intended without endangering system stability [3]. Apart from this, TCSC is also being used to mitigate SSR (Sub Synchronous Resonance). Table 2. Eigenvalues of WSCC system with SVC 423 Let a TCSC be connected between bus k and bus m as shown in Fig. 3. It has been assumed that the controller is lossless. The power-balance equation and BTCSC are given as [4] Pk = Vk Vm BTCSC sin( θ k − θ m ) (7) Qk = V k2 BTCSC − Vk Vm BTCSC cos(θ k − θ m ) (8) Pm = Vk Vm BTCSC sin( θ m − θ k ) (9) Qm = Vm2 BTCSC − Vk Vm BTCSC cos(θ m − θ k ) (10) BTCSC = −π (κ 4 − 2κ 2 + 1) cosκ (π − α ) / [ X c (πκ 4 cosκ (π − α ) − π cosκ (π − α ) − 2κ 4α cosκ (π − α ) (11) +2α κ 2 cosκ (π − α ) − κ 4 sin 2α cosκ (π − α ) + κ 2 sin 2α cosκ (π − α ) − 4κ 3 cos2 α sin κ (π − α ) −4κ 2 cosα sin α cosκ (π − α ))] Equation (11) is obtained from (6). There are number of control strategies for TCSC [4] • • A. Controller Model The structure of the TCSC is the same as that of a FC-TCR type SVC. The equivalent impedance of the TCSC can be modeled using the following equation [4]. κ σ + sin σ X TCSC = X c [ 1 − 2 + π κ −1 4 κ 2 cos 2 (σ 2) (κ tan κσ σ − tan )] 2 2 π (κ − 1) (6) where α = Firing angle delay (after forward valve voltage) σ = Conduction angle = 2 (π − α) and 2 2 κ = TCSC ratio = X c X L The TCSC can be continuously controlled in the capacitive or inductive zone by varying firing angle in a predetermined fashion thus avoiding steady state resonance region. B. Incorporation of TCSC in Multimachine Power System • • Reactance Control: Bset − BTCSC = 0 Power Control: Pset − P = 0 Current Control: I set − I = 0 δ set − δ = 0 where the subscript “set” indicates set point. Any of the above mentioned control strategies can be used to achieve the objectives of TCSC. Of these, the power control strategy has been used here, the block diagram of which is shown in Fig. 4. Transmission angle control: Fig. 4. Block diagram of TCSC power controller The line power is monitored and compared to desired power Pset. The error is fed to proportional-integral (PI) controller. The output of PI controller is fed through a first order block to get the desired α . The controller equations are given as K X 2TCSC = I ( Pset − P ) s (12) X& 2TCSC = K I Pset − K I P (13) − X 1TCSC X 2TCSC K P Pset K P P α o X& 1TCSC = + + − + Tc1 Tc1 Tc1 Tc1 Tc1 Fig. 3. TCSC representation (14) 424 NATIONAL POWER SYSTEMS CONFERENCE, NPSC 2002 In order to get the linearized model of TCSC, (7-11), (13) and (14) are linearized. The linearized TCSC model in matrix notation can be written as ∆θ k ∆V k ∆X& TCSC = ATCSC ∆X TCSC + BTCSC ∆θ m ∆Vm (15) ∆X& A1mod & ∆X SVC P2svc ∆X& TCSC = P2tcsc 0 K2 0 G 1 E 0 + 0 ∆U 0 0 ∆X 1TCSC ∆X 2TCSC where ∆X TCSC = ∆θ k ∆Pk ∆V ∆Q k k=C ∆ + X D TCSC TCSC 1TCSC ∆θ m ∆Pm ∆Vm ∆Qm (16) Incorporation of (15), (16) and (5) gives DAE model of multimachine system with TCSC incorporated in the system. After reordering, final form of DAE model with TCSC is given as A2new A3 new ∆X ∆X& A1mod P1tcsc & P ∆X TCSC = 2tcsc ATCSC Btcsc1new Btcscnew ∆X TCSC 0 K 2 P4tcsc K1new C4 new ∆ z 0 G1 C TCSC D1new _ tcsc D2new− tcsc ∆v E 0 + ∆U 0 0 (17) Equation (17) can be written as ∆X& SYS −TCSC = ASYS −TCSC ∆ X SYS −TCSC + ETCSC ∆U (18) P1svc P1tcsc A2new A3new ∆X ASVC tcsv1 Bsvc1new Bsvcnew ∆X SVC tcsv2 ATCSC Btcsc1new Btcscnew ∆XTCSC P4svc P4tcsc K 1new C 4new ∆z DSVC CTCSC D1newsvtc D2newsvtc ∆v (19) VI. CASE STUDY After incorporating FACTS Controllers individually and in combination into DAE model of multimachine system, voltage stability of 9-bus system is carried out at various loading conditions. However results are presented for maximum loading condition. At maximum loading condition, there is an SVC connected at bus 5 and TCSC is connected between buses 7 and 5. Table 3 shows eigenvalues of the 9-bus system at maximum loading condition for four different cases - without any FACTS device, with an SVC connected at bus 5 and with a TCSC connected between buses (7-5) and combination of SVC-TCSC (The locations of SVC and TCSC are same as considered individually). The TCSC controller parameters are kept as KP =0.1 and KI =10 and the SVC controller parameters are chosen as KP =0.3 and KI =100. When SVCTCSC combination is used, the controller parameters are kept the same. Table 3 shows that without any FACTS device the system is unstable, where unstable eigenvalues are highlighted. However the system becomes stable when either SVC or TCSC or their combintion are connected. VII. CONCLUSIONS V. INCORPORATION OF MULTIPLE FACTS DEVICES Incorpo ration of multiple FACTS devices can be done on the same lines as described for TCSC. Any of these models or a combination of them can be incorporated in the DAE multimachine model to form the model of the overall system. For example when an SVC-TCSC combination is required, the overall system in compact form will emerge as This paper presents a systematic modular approach to incorporate series and shunt FACTS Controllers. The approach is general and can be applied to any large power system. With the proposed approach it is possible to connect any number and any type (Series and Shunt and their combination) of FACTS Controllers. The results of the proposed modular approach are illustrated for 9-bus WSCC system. VIII. [1] [2] REFERENCES Peter W Sauer and M. A. Pai, Power System Dynamics and Stability, Prentice Hall, 1998. M. J Laufenberg, M. A. Pai and K. R. Padiyar, “Hopf Bifurcation Control in Power System with Static Var Compensators,” Electric Power & Energy Systems, Vol. 19, No. 5, pp. 339-347, 1997. INDIAN INSTITUTE OF TECHNOLOGY, KHARAGPUR 721302, DECEMBER 27-29, 2002 [3] E. V. Larsen, C. Bowler, B. Damsky and S. Nilsson, “Benefits of Thyristor Controlled Series Compensation,” CIGRE, 14/37/38-04, Paris, 1992. [4] 425 C. A. Cañizares and Z. T. Faur, “Analysis of SVC and TCSC Controllers in Voltage Collapse,” IEEE Trans. on Power Systems, Vol. 14, No. 1, pp. 158-165, February 1999. Table 3 Eigenvalues of the 9-bus system at maximum loading condition