Application of Centered Differentiation and Steepest Descent to
advertisement

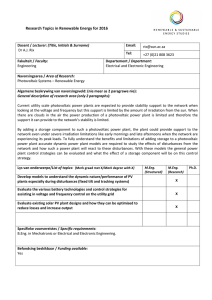
IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 54, NO. 5, OCTOBER 2007 2539 Application of Centered Differentiation and Steepest Descent to Maximum Power Point Tracking Weidong Xiao, Student Member, IEEE, William G. Dunford, Senior Member, IEEE, Patrick R. Palmer, Member, IEEE, and Antoine Capel Abstract—This paper concentrates on two critical aspects to improve the performance of maximum power point tracking (MPPT). One improvement is to accurately locate the position of the maximum power point (MPP) by using the centered differentiation. Another effort is to reduce the oscillation around the MPP in steady state by controlling active perturbations. This paper also adopts the method of steepest descent for MPPT, which shows faster dynamic response and smoother steady state than the method of hill climbing. Comprehensive experimental evaluations have successfully illustrated the effectiveness of the proposed algorithm. Index Terms—Control systems, digital control, maximum power point tracking (MPPT), photovoltaic power systems. I. I NTRODUCTION I N PHOTOVOLTAIC power systems, a particular control algorithm, which is maximum power point tracking (MPPT), is utilized because it takes full advantage of available solar energy. A variety of techniques has been developed in recent years. Studies [1]–[6] indicate that the optimal operating voltage of a photovoltaic module is always very close to a fixed percentage of the open-circuit voltage. This implies that MPPT could simply use the open-circuit voltage to predict the optimal operating condition. This is called voltage-based MPPT. Similarly, studies [2]–[4] and [7] illustrate a currentbased MPPT method, which approximates a linear relationship between the maximum power point (MPP) and the shortcircuit current. Another technique was developed according to a linear approximation between the maximum output power and the optimal operating current [7], [8]. A fourth algorithm [9] measures and compares the output of two modules to track the MPP. Various other techniques [10]–[13] are also available to estimate the characteristics of photovoltaic output and track the MPP by way of some specific mechanisms such as a slidingmode observer and neural network. Generally, most recent applications of MPPT are based on the extremum value theorem [14]–[19]. According to the theorem, as described in [20], the extremum, which is maximum or minimum, occurs at the critical point. If a function y = f (x) Manuscript received October 9, 2006; revised February 28, 2007. W. Xiao and W. G. Dunford are with the University of British Columbia, Vancouver, BC V6T 1Z4, Canada (e-mail: weidongx@ece.ubc.ca). P. R. Palmer is with the Department of Engineering, University of Cambridge, Cambridge CB2 1PZ, U.K. A. Capel is with the School of Engineering, Universitat Rovira i Virgili, Tarragona 43007, Spain. Color versions of one or more of the figures in this paper are available online at http://ieeexplore.ieee.org. Digital Object Identifier 10.1109/TIE.2007.899922 Fig. 1. Block diagram of P&O and IncCond MPPT topologies. is continuous on a closed interval, it has the critical points at all point x0 , where f (x0 ) = 0. In photovoltaic power systems, the local MPP can be continuously tracked and updated to satisfy a mathematical equation: dp/dx = 0, where p represents the photovoltaic power and x represents the control variable chosen from the photovoltaic voltage, photovoltaic current, or switching duty cycle of power interfaces. In photovoltaic power applications, two popular algorithms are the perturbation and observation (P&O) method [17] and the incremental conductance (IncCond) method [19]. The operation is regulating the voltage of photovoltaic array to follow an optimal set point, which represents the voltage of the MPP VMPP , as shown in Fig. 1. The focus of the MPPT is determining when dp/dv = 0, where p represents the output power and v represents the photovoltaic voltage. Without a mathematical model, this is generally based on numerical differentiation (the Euler method), which is a process of finding a numerical value of a derivative of a given function at a given point. The Euler method is simple in use, but shows local truncation errors [21], [22]. The definition of local truncation errors is how well the exact solution satisfies the numerical scheme. To clearly demonstrate this subject, we define the derivative in a general form of dp/dv, as shown in (1). Consequently, the numerical differentiations of forward Euler and backward Euler [21] can be demonstrated in (2) and (3), correspondingly, where pk and pk−1 represent the sequence of the photovoltaic power, vk and vk−1 symbolize the sequence of the photovoltaic voltage, and ∆V is the incremental step of photovoltaic voltage, which is equal to vk − vk−1 . As shown in (2) and (3), the local truncation error for the Euler methods is equal to O(∆V 2 ), which stands for the order of ∆V 2 and indicates a first-order accuracy. In mathematics, the big O notation is usually used to characterize the residual term of a truncated infinite series. The Euler methods also demonstrate both magnitude errors and phase errors in the frequency domain [23], [24]. The local truncation error is the reason why both P&O and IncCond 0278-0046/$25.00 © 2007 IEEE Authorized licensed use limited to: Weidong Xiao. Downloaded on October 22, 2008 at 19:33 from IEEE Xplore. Restrictions apply. 2540 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 54, NO. 5, OCTOBER 2007 numerical differentiation. However, the lower bound of ∆V is limited by the achievable resolution of digital controllers and the accuracy of measurement. Further, the signal-to-noise ratio of measurement can cause instability problems of numerical differentiation when the ∆V value is not significant enough [25]. For MPPT, deviations from MPPs result in power losses. In this paper, there are two key parts to improve tracking performance. One improvement is to accurately locate the position of MPP by using the centered differentiation. Another effort is to reduce the oscillation around the MPP in steady state. This paper also presents the method of steepest descent to improve the tracking performance. The following sections will discuss these issues and provide relative solutions. II. P ROPOSED A LGORITHM OF MPPT Fig. 2. Measured signals of photovoltaic module with the operation of P&O. algorithms can never accurately locate the optimal operating point by finding the root of f (v, p) = 0, as shown in the following: dp = f (v, p) dv pk − pk−1 f (vk−1 , pk−1 ) = + O(∆V 2 ) ∆V pk − pk−1 f (vk , pk ) = + O(∆V 2 ). ∆V (1) (2) (3) Continuous oscillation around the optimal operating point is an intrinsic problem of the P&O algorithms, as shown in Fig. 2. The plots illustrate the measured signals of the photovoltaic voltage VPV , the photovoltaic current IPV , and the output power PPV . The normalization was based on the MPP. In the steady state, the continuous oscillation of the operating point around the voltage of MPP VMPP makes the averaged power level biased from the MPP. The IncCond method was developed to eliminate the oscillations around the MPP and avoid the deviation problem. According to [19], the performance of IncCond is 8.4% better than the P&O method. However, as explained in [18], the P&O parameters in [19] might not be properly optimized. As a result, it is difficult to justify which algorithm is better because there is not a standard method to evaluate and compare the performance of MPPT. In theory, both algorithms control the system in steady state when the approximation of dp/dv is equal to zero. However, the experiments [19] showed that there were still oscillations under stable environmental conditions because the digitalized approximation of maximum power condition of di/dv = −i/v, which is equivalent to dp/dv = 0, only rarely occurred. As shown in (2) and (3), the problem is actually caused by the local truncation error of the numerical differentiation, i.e., the Euler method, of which the approximation always deviates from the true MPP. Another drawback for both algorithms is the difficulty in choosing the proper perturbation step of photovoltaic voltage [18]. Generally, according to (2) and (3), a smaller perturbation size ∆V implies a better accuracy of The improvements of MPPT are illustrated by the following facts: the reduction of local truncation error; the evaluation of numerical stability; the selection of tracking methods; and the oscillation reduction. A. Reduction of Local Truncation Error The centered differentiation is symmetric, as expressed in (4) and (5). This method requires three-point measurements: (vk−1 , pk−1 ); (vk , pk ); and (vk+1 , pk+1 ) to approximate the derivative value at the center point (vk , pk ). As shown in (5), the local truncation error for the centered differentiation is equal to O(∆V 3 ), which indicates a second-order accuracy. This means that this method is more accurate than the Euler methods for numerical differentiation. Further, it was proved that the centered differentiation method, as shown in the following, does not have a phase error in the frequency domain [23]: dp = f (v, p) dv pk+1 − pk−1 + O(∆V 3 ). f (vk , pk ) = 2∆V (4) (5) For MPPT, a controller needs to find the point where f (v, p) = 0. The symmetric characteristics allow the extremum value to be located with a better precision, as demonstrated by the normalized power–voltage curve of a photovoltaic module shown in Fig. 3. The normalization is based on the MPP. When the calculation shows pk+1 ≈ pk−1 or pk+1 − pk−1 ≈ 0, the differentiation approximation of f (v, p) is very close to zero and the MPP is located at the center point (vk , pk ) instead of either (vk+1 , pk+1 ) or (vk−1 , pk−1 ). However, Euler methods can never make the operating point remain stably at the actual MPP (vk , pk ) because their approximation is always biased due to the phase error. B. Evaluation of Numerical Stability Numerical stability is an essential property for any numerical algorithm. In general, numerical differentiation is more difficult than numerical integration because numerical differentiation Authorized licensed use limited to: Weidong Xiao. Downloaded on October 22, 2008 at 19:33 from IEEE Xplore. Restrictions apply. XAIO et al.: APPLICATION OF CENTERED DIFFERENTIATION AND STEEPEST DESCENT TO MPPT 2541 Fig. 4. Comparison of different algorithms for MPPT. Fig. 3. Normalized power–voltage curve of photovoltaic module. requires Lipschitz classes [26]. According to the definition, the numerical differentiation shall always satisfy the Lipschitz condition shown in (6), where CLIP is a constant independent of ∆V . In MPPT, the value of CLIP can be selected according to the maxima of f (v, p), because this value is known through offline analysis of power–voltage curves. For a specific photovoltaic module, i.e., BP350, the absolute value of the steepest slope is 37 under the standard test condition. Therefore, the value of CLIP is chosen as 37. The BP350 is a product of BP Solar International Inc. To promise numerical stability, the controller will evaluate this following condition after each numerical differentiation: | pk+1 − pk−1 | ≤ CLIP | 2∆V |. (6) Disturbances and measurement noise are two major reasons that cause a malfunction of numerical differentiation. Fig. 5. Gauss–Newton method is theoretically efficient in MPPT. algorithm needs to numerically perform both single and double differentiations, as shown in the following: C. Selection of Tracking Methods Two mathematical methods are relevant to applications of MPPT. One optimization method is the steepest descent, which is also called gradient descent method [27], which is originally an optimization method in applied mathematics. Another is the Gauss–Newton method, which is also called Newton–Raphson method, which is a root-finding algorithm [27], [28]. The method of steepest descent can be applied to find the nearest local MPP when the gradient of the function can be computed. Based on the method of steepest descent, the algorithm of MPPT can be demonstrated by (7), where Kε is the step-size corrector, and dp/dv is the derivation. The value of Kε decides how steep each step takes in the gradient direction. Based on a specific application, the tuning of Kε will be further discussed in Section II-D. The Newton–Raphson method uses a first and second derivative of the change with parameter value to estimate the direction and distance the program should to go to reach a better point. When it is used to track MPPs, the computation of operating point can be illustrated in (8). This vk+1 = vk + vk+1 dp dv v=v k Kε dp dv = vk − 2 v=vk . d p dv 2 (7) (8) v=vk In theory, the Gauss–Newton method is the fastest algorithm in comparison to the steepest descent and the hill climbing. The plots of simulation results shown in Figs. 4 and 5 demonstrate their efficiency in seeking the voltage of MPP. The normalization of the photovoltaic voltage in Fig. 4 was based on the opencircuit voltage. As shown in Fig. 5, the algorithm can find the MPP after four steps of movement. Nevertheless, this procedure can be unstable regarding the initial condition [28]. To avoid this problem, the proposed algorithm of maximum power point tracking (PAMPPT) chooses the method of steepest descent, which shows faster dynamic response and smoother steady state than the method of hill climbing, as illustrated in Fig. 4. Authorized licensed use limited to: Weidong Xiao. Downloaded on October 22, 2008 at 19:33 from IEEE Xplore. Restrictions apply. 2542 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 54, NO. 5, OCTOBER 2007 D. Oscillation Reduction Continuous tracking operations cause unnecessary oscillations around the MPP. This can be reduced by stopping continuous perturbations when a local MPP is accurately located. The controller shall be able to achieve these operations: 1) to evaluate if the true MPP is found; 2) to stop the perturbation operation to make the operating point stay at MPP; and 3) to estimate if the MPP has drifted to a new location. According to the extremum value theorem, any MPP shall satisfy a condition, either (9) or (10), where v is the photovoltaic voltage, i is the photovoltaic current, p symbolizes photovoltaic power, vmpp stands for the voltage of MPP, and impp represents the current of MPP. Section II-C has shown an increasing accuracy of numerical differentiation by the introduction of the centered differentiation. However, the centered differentiation cannot eventually eliminate the local truncation error and the tracking iteration continues until the condition illustrated in (11) is continuously satisfied for several cycles. Then, the local extremum has been determined within a chosen accuracy εmpp . The choice of εmpp , as shown in the following, depends on a required sensitivity and a signal-to-noise ratio of measurements: dp =0 dv vmpp dp =0 di (9) (10) impp dp ≤ εmpp . dv (11) A flowchart in Fig. 6 demonstrates the operation. When the location of MPP is located, the controller records the value of impp and vmpp for further estimation described in Section II-E. As shown in Fig. 6, the variable MPP_index records how many times condition (11) is continuously satisfied. When the number of MPP_index is accumulated to a certain threshold MPP_th, the controller presumes a local MPP is temporarily found under current conditions. The controller needs to clear the index variable MPP_index and records the current location of MPP. Otherwise, the MPPT will continue until the MPP is successfully located. Both insolation and temperature are time-variant parameters of a photovoltaic power system in a daily period. A changing environment can make the MPP drift to a new location. From (9) and (10), we can derive (12) and (13), respectively. Each MPP corresponds to a specific value of resistance Rmpp or conductance Gmpp . Consequently, the controller can estimate a shift of MPP by monitoring the variation of either resistance Rmpp or conductance Gmpp . The absolute resistance error eR is characterized in (14), which illustrates the difference of the present measurement and the recorded Rmpp . Likewise, the absolute conductance error eG of the present measurement and the recorded Gmpp is characterized in (15). The averaged values of these absolute errors are symbolized in (16) and (17) for resistance and conductance, correspondingly. Nth , as shown Fig. 6. Flowchart to evaluate if the MPP was located. in the following, is the number of samples for each averaging window: di + Gmpp = 0 (12) dv vmpp dv + Rmpp = 0 (13) di impp v eR = − Rmpp (14) i i eG = − Gmpp (15) v N th eR (i) i=1 ER = (16) Nth N th eG (i) . (17) EG = i=1 Nth The averaged values of these absolute errors ER or EG are updated in each tracking cycle. An MPP that has drifted can be detected by monitoring the change of either ER or EG . If there is no variation of MPP, the values of ER or EG are generally within a certain range. When the averaged error is larger than a specified threshold, the controller supposes that the MPP has drifted to a new level and initializes a procedure of MPPT. The controller stops the calculation of the averaged errors when it is tracking the new MPP. ER or EG will be reset to zero after the existing MPP is successfully located in steady state, whereas Rmpp and Gmpp should be updated accordingly. Then, the detection restarts for a new shift of MPP. Authorized licensed use limited to: Weidong Xiao. Downloaded on October 22, 2008 at 19:33 from IEEE Xplore. Restrictions apply. XAIO et al.: APPLICATION OF CENTERED DIFFERENTIATION AND STEEPEST DESCENT TO MPPT Fig. 7. 2543 Flowchart illustrating the main loop of the proposed MPPT. With a regulation of photovoltaic voltage, the controller needs to monitor the error of the photovoltaic current change since the voltage is principally constant due to the regulation process. The absolute error of the photovoltaic current and the average error are respectively symbolized as follows: eI = i − impp N th EI = (18) eI (i) i=1 Nth (19) where eI represents the absolute error of the photovoltaic current, impp is the recorded current of MPP, EI symbolizes the averaged error of the photovoltaic current, and Nth is the number of samples for each averaging window. When EI is larger than a specified threshold EI _THRED , the controller can determine that the MPP has drifted to a new level and initializes a procedure of MPPT. EI _THRED is chosen by analyzing the nominal current of the photovoltaic array and the dynamics of weather condition. The controller stops the calculation of the averaged errors when it is tracking the new MPP. EI will be reset to zero after the existing MPP is successfully located in steady state. Then, the detection restarts to search for a new shift of MPP. This is applicable for systems with a photovoltaic regulation function. For the general case, ER or EG shall be used as the criterion to determine a shifted MPP. E. Main Loop Fig. 7 illustrates a main loop of the proposed MPPT. The tracking procedure can be activated or deactivated according to the estimation if an MPP has been changed or located, correspondingly. For the evaluation of drifting or locked MPP, refer to the former sections. Fig. 8. Flowchart of the proposed MPPT. F. Flowchart of MPPT According to [2], for silicon photovoltaic modules, the voltage of MPP VMPP is about 71% of the open-circuit voltage. For the PAMPPT, the startup time can be shortened noticeably because the controller knows the range of MPP by measuring the open-circuit voltage in the initial condition. However, the optimal duty cycle for MPP is generally unknown at the beginning because it depends on the specific system and the load condition. The flowchart in Fig. 8 demonstrates an implementation of the proposed MPPT. The numerical differentiation is based on the centered differentiation according to the analysis in the former sections. To avoid numerical instabilities, the Lipschitz function is evaluated in each control cycle according to the criterion, as shown in (6). The tracking goes back to P&O method when the stability condition is not satisfied. The value of Kε determines how big the step takes in the gradient direction. In this paper, the system starts with a chosen value for Kε . Then, a further tuning proceeds to make sure that the tracking converges to the local extremum value. When a fixed-point digital signal processor (DSP) or microcontroller is used, it is important to choose binary numbers for both ∆V and Kε for efficient computation. The variable of “Sched” is Authorized licensed use limited to: Weidong Xiao. Downloaded on October 22, 2008 at 19:33 from IEEE Xplore. Restrictions apply. 2544 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 54, NO. 5, OCTOBER 2007 TABLE I IMPORTANT PARAMETERS USED IN FIGS . 6 AND 8 TABLE II SYSTEM SPECIFICATIONS TABLE III VARIABLES AND RELATIVE RESOLUTION Fig. 9. Measured maximum photovoltaic power of the BP350 acquired in Vancouver from 10:00 A . M . to 11:00 A . M . in June 15, 2006. used for scheduling the computation load of MPPT. As shown in the flowcharts in Figs. 6 and 8, several important parameters of the proposed algorithm are listed in Table I. These are used for the system evaluation, which will be illustrated in Section III. III. E VALUATION The efficiency of MPPT is defined as a ratio of the practical power output divided by the true maximum power value. However, a fair comparison is never easy because a true MPP is unknown at a specific moment when the system is operated by MPPT. One recommendation [29] is to periodically interrupt the operation of MPP and switch the photovoltaic output to an I–V curve tracer, which is able to acquire the I–V curve and show the MPP quickly. However, this method is only suitable for evaluating the steady-state performance since the assumption is that environmental conditions do not significantly change in a short time period. Furthermore, it is important to assess the dynamic performance of MPPT caused by rapid and unpredictable change of environmental conditions. Fig. 9 shows the weather effect on the photovoltaic power of a specific solar module, i.e., the BP350, which is a product of BP Solar International Inc. In 1-h period, a specific photovoltaic power system is operated by the P&O MPPT algorithm to deliver the maximum power of the photovoltaic module. The photovoltaic power variation is sampled by a data acquisition system recording the photovoltaic voltage and current. This measurement demonstrates a dramatic change of MPP in 1-h period. The sampling rate is 10 kHz. Under this condition, periodical interruptions will eventually affect the dynamic evaluations of MPPT in response of the fast variation of solar insolation. To properly evaluate the MPPT, a DSP-controlled photovoltaic power system is specially designed and constructed for evaluation purposes, as illustrated in Fig. 10. This consists of two identical photovoltaic modules, two equal dc–dc boost converters as the power interfaces, and a 24-V battery bank. The system specifications are summarized in Table II. The eZDSP LF2407 acts as a digital controller, in which the control algorithms are implemented. The DSP has 16 channels of 10-bit analog–digital converter. The measured variables and relative resolutions are listed in Table III. To design a switching mode converter, there is always a tradeoff between switching frequency, size of the system, and power losses in all components. By considering the tradeoff, the switching frequency of the converter is 40 kHz in this system design. According to the 40-MHz clock of the DSP used for this system, the resolution of duty cycle is only 0.1%. The capacity of the battery bank is sufficient to handle the maximum power outputs from both photovoltaic modules. To avoid any overcharge of batteries, the system also includes a charge protection unit and a discharge circuit, which are not directly related to this paper and not illustrated in Fig. 10. The structure allows testing two photovoltaic modules independently and simultaneously under the same environment. The experimental results will be used to illustrate the effectiveness of the proposed control method and MPPT. With this structure, one of two identical modules is used as the benchmark sharing the same load and control bandwidth, whereas another is implemented with a developed algorithm. The benchmark algorithm of MPPT is the well-established method of P&O. For the parameterization and implementation, refer to the study [18] published in 2005, which gives detailed analysis and optimization for the P&O method. According to the analysis [18], the perturbation time interval for this bench system shall be longer than 0.0072 s. Therefore, we choose the tracking frequency as 100 Hz, which satisfies this requirement. The perturbation level of switching duty cycle is alternatively Authorized licensed use limited to: Weidong Xiao. Downloaded on October 22, 2008 at 19:33 from IEEE Xplore. Restrictions apply. XAIO et al.: APPLICATION OF CENTERED DIFFERENTIATION AND STEEPEST DESCENT TO MPPT 2545 Fig. 10. Block diagram of the bench system used to evaluate MPPT under the same condition. Fig. 11. Plots of startup procedures of PAMPPT and P&O algorithms under low radiation. The available power is about 8 W for 50-W solar module. (a) Comparison of normalized power waveforms controlled by PAMPPT and P&O, (b) normalized voltage waveform controlled by PAMPPT, (c) normalized voltage waveform controlled by P&O, (d) normalized current waveform controlled by PAMPPT, and (e) normalized current waveform controlled by P&O. chosen either 0.01 or 0.005. The following evaluations will show the dynamic response, steady-state performance, and daily 8-h tests. As shown in Figs. 11–16, the power and voltage waveforms were normalized by the MPP and the voltage of MPP, respectively. The PAMPPT is the abbreviation of the proposed algorithm of MPP, which was developed and illustrated in Section II. Fig. 12. Plots of startup procedures of PAMPPT and P&O algorithms under weak radiation. The available power is about 3.53 W for the 50-W solar module. (a) Comparison of normalized power waveforms controlled by PAMPPT and P&O, (b) normalized voltage waveform controlled by PAMPPT, (c) normalized voltage waveform controlled by P&O, ∆d was equal to 0.005, (d) normalized current waveform controlled by PAMPPT, and (e) normalized current waveform controlled by P&O, ∆d was equal to 0.005. A. Startup Performance A routine operation of photovoltaic power systems is that the controller starts the MPPT in the morning whenever sunlight is available. However, the radiation is generally low at this moment. Fig. 11 demonstrates that PAMPPT can locate the MPP much faster than the P&O method at low power condition, Authorized licensed use limited to: Weidong Xiao. Downloaded on October 22, 2008 at 19:33 from IEEE Xplore. Restrictions apply. 2546 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 54, NO. 5, OCTOBER 2007 Fig. 13. Normalized power waveforms in steady state that the 50-W photovoltaic module outputs about 23-W power. (a) Normalized power waveforms in steady state when the system was operated by PAMPPT. (b) Normalized power waveforms in steady state when the system was operated by P&O and the perturbation step ∆d was equal to 0.005. Fig. 15. Normalized power waveforms in steady state that the 50-W photovoltaic module outputs about 23-W power. (a) Normalized power waveforms in steady state when the system was operated by PAMPPT. (b) Normalized power waveforms in steady state when the system was operated by P&O and the perturbation step ∆d was equal to 0.01. Fig. 14. Normalized voltage waveforms in steady state that the 50-W photovoltaic module outputs about 23-W power. (a) Normalized voltage waveforms in steady state when the system was operated by PAMPPT. (b) Normalized voltage waveforms in steady state when the system was operated by P&O and the perturbation step ∆d was equal to 0.005. Fig. 16. Normalized voltage waveforms in steady state that the 50-W photovoltaic module outputs about 23-W power. (a) Normalized voltage waveforms in steady state when the system was operated by PAMPPT. (b) Normalized voltage waveforms in steady state when the system was operated by P&O and the perturbation step ∆d was equal to 0.01. where the available power is about 8 W for a 50-W photovoltaic module. Compared to 0.23 s for P&O method, the PAMPPT used 0.04 s to stabilize the operating point at the MPP. Ideally, photovoltaic power systems should start even earlier to harvest more solar energy in the early morning. This requires that the MPPT can start and work well under weak radiation. Fig. 12 shows that the PAMPPT can initialize the tracking operation and stabilize the operation at MPP when the achievable photovoltaic power is only 3.53 W for a 50-W module due to the weak insolation. However, when the perturbation step ∆d is 0.005, the P&O method was not able to find the MPP because it was trapped due to the low signal-to-noise ratio and large local truncation errors. Experiments show that the P&O method can operate normally when the perturbation step is increased to 0.03 under the weak insolation. However, the large ripples of photovoltaic voltage and power result in significant loss in steady state. B. Steady-State Performance The benefit of PAMPPT is that the controller stops the tracking process and runs only the voltage regulation when the MPP is located. In steady state, this dramatically reduces ripples in photovoltaic power and voltage compared to continuous perturbations caused by P&O-type algorithms. The value of perturbation step affects the steady-state performance when P&O-type algorithms are used. Figs. 13 and 14 illustrate the photovoltaic power and voltage waveforms, respectively, when the step size is 0.005 for the P&O method. Figs. 15 and 16 show normalized power waveforms and normalized voltage waveforms, correspondingly, when the step size is 0.01 for the P&O method. Comparing to the P&O methods with two difference step sizes, the improvement of PAMPPT in steady state can be demonstrated by the values of standard deviation summarized in Table IV, where ∆d stands for the pertur- Authorized licensed use limited to: Weidong Xiao. Downloaded on October 22, 2008 at 19:33 from IEEE Xplore. Restrictions apply. XAIO et al.: APPLICATION OF CENTERED DIFFERENTIATION AND STEEPEST DESCENT TO MPPT 2547 TABLE IV PERFORMANCE COMPARISON IN STEADY STATE bation step of duty cycle. Table IV also demonstrates the mean values of power outputs. The standard deviation of photovoltaic voltage controlled by PAMPPT is much smaller than that commanded by P&O algorithm. As a result, the proposed control system delivers more solar power under the same condition. C. Results of Long-Term Test To sufficiently evaluate the efficiency of photovoltaic power systems, daily long-term tests with natural sunlight have been performed for 14 days in Vancouver, BC, Canada, from June 14, 2006 to July 3, 2006. Most of them are conducted for 8 h a day. Both PAMPPT and P&O were being tested under the same weather conditions because two power interfaces are available for operations at the same time. A multichannel data acquisition system is available to record the photovoltaic voltages and currents every second for 8-h periods. The arithmetic mean of a set of power values P is expressed as P = N 1 V (k)I(k). N Fig. 17. Waveforms of power and voltage acquired by the 8-h test on June 24, 2006, which was a sunny day. (a) Comparison of power waveforms controlled by PAMPPT and P&O, (b) voltage waveform controlled by PAMPPT, and (c) voltage waveform controlled by P&O. (20) k=1 Calibrations have shown that two photovoltaic modules used for tests give slightly different output characteristics. Module #2 demonstrates more power output than module #1 under same conditions. For better comparison, two modules were alternatively connected to the power interfaces in a daily basis. When module #2 is operated by PAMPPT and module #1 is controlled by P&O, module #2 outputs average 5.3% more energy than module #1 in an 8-h test period. When module #1 is operated by PAMPPT and module #2 is controlled by P&O, module #2 harvests an average of 3.3% more energy than module #1. After 14 days 8-h tests with natural sunlight, the system controlled by PAMPPT harvested total 3.67-kWh solar energy, and the system controlled by P&O controlled collected 3.64 kWh, which is 1.0% less. Fig. 17 demonstrates waveforms of power and photovoltaic voltage, in one 8-h test performed in June 24, 2006, which is a perfect sunny day. Evaluations show that the PAMPPT performs even better in rapidly changing atmospheric conditions. One example is illustrated in Fig. 18, where the PAMPPT made module #2 harvest 5.8% more solar energy than P&O algorithm that controlled module #1. Broken clouds happened very often in the 8-h testing period of July 9, 2006. As a result, the 14 daily tests demonstrate that the PAMPPT is an efficient algorithm that always harvests about 1.0% more energy than the P&O method under different weather conditions. Fig. 18. Waveforms of power and voltage acquired by the 8-h test on July 9, 2006, which was a cloudy day. (a) Comparison of power waveforms controlled by PAMPPT and P&O, (b) voltage waveform controlled by PAMPPT, and (c) voltage waveform controlled by P&O. D. Computation Requirement Based on this specific system, as described in Fig. 10 and Tables II and III, the PAMPPT requires more computation power than the simple P&O algorithm. According to the tracking frequency of 100 Hz, the P&O can finish the MPPT in 1 µs in each tracking cycle, which is equal to 0.01% of total computational power. In the application of the PAMPPT system, the sampling frequency of the photovoltaic voltage is 40 kHz. The PAMPPT algorithm requires 10 µs in one 25-µs period to fulfill the regulation control of photovoltaic voltage, which is equal to 40% computational power. Authorized licensed use limited to: Weidong Xiao. Downloaded on October 22, 2008 at 19:33 from IEEE Xplore. Restrictions apply. 2548 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 54, NO. 5, OCTOBER 2007 IV. C ONCLUSION This paper proposed an algorithm of MPPT, which can accurately locate the position of MPP and reduce the oscillation around the MPP in steady state. Instead of the Euler method of numerical differentiation, this paper proposes the centered differentiation, which improves the approximation to a secondorder accuracy. The algorithm also occasionally stops tracking operations to avoid unnecessary oscillations around the MPP. Long-term evaluations show that it is an efficient algorithm that always harvests about 1% more energy than the P&O method under different weather conditions. However, a much simpler controller could be used for the P&O algorithm because its computational requirement is much less than the PAMPPT. This paper also illustrates the effectiveness of the test bench system and the evaluation method with natural sunlight. R EFERENCES [1] J. H. R. Enslin, M. S. Wolf, D. B. Snyman, and W. Swiegers, “Integrated photovoltaic maximum power point tracking converter,” IEEE Trans. Ind. Electron., vol. 44, no. 6, pp. 769–773, Dec. 1997. [2] M. A. S. Masoum, H. Dehbonei, and E. F. Fuchs, “Theoretical and experimental analyses of photovoltaic systems with voltage and current-based maximum power-point tracking,” IEEE Trans. Energy Convers., vol. 17, no. 4, pp. 514–522, Dec. 2002. [3] J. Appelbaum, “Discussion of theoretical and experimental analyses of photovoltaic systems with voltage and current-based maximum power point tracking,” IEEE Trans. Energy Convers., vol. 19, no. 3, pp. 651–652, Sep. 2004. [4] J. Martynaitis, “Discussion of theoretical and experimental analyses of photovoltaic systems with voltage and current-based maximum power point tracking,” IEEE Trans. Energy Convers., vol. 19, no. 3, p. 652, Sep. 2004. [5] H. E. S. A. Ibrahim, F. F. Houssiny, H. M. Z. El-Din, and M. A. El-Shibini, “Microcomputer controlled buck regulator for maximum power point tracker for DC pumping system operates from photovoltaic system,” in Proc. IEEE Int. Fuzzy Syst. Conf., Seoul, Korea, Aug. 1999, pp. 406–411. [6] W. Swiegers and J. H. R. Enslin, “An integrated maximum power point tracker for photovoltaic panels,” in Proc. IEEE Int. Symp. Ind. Electron., Pretoria, South Africa, Jul. 1998, pp. 40–44. [7] T. Noguchi, S. Togashi, and R. Nakamoto, “Short-current pulse-based maximum-power-point tracking method for multiple photovoltaic-andconverter module system,” IEEE Trans. Ind. Electron., vol. 49, no. 1, pp. 217–223, Feb. 2002. [8] M. Nobuyoshi and I. Takayoshi, “A control method to charge seriesconnected ultraelectric double-layer capacitors suitable for photovoltaic generation systems combining MPPT control method,” IEEE Trans. Ind. Electron., vol. 54, no. 1, pp. 374–383, Feb. 2007. [9] J. H. Park, J. Y. Ahn, B. H. Cho, and G. J. Yu, “Dual-module-based maximum power point tracking control of photovoltaic systems,” IEEE Trans. Ind. Electron., vol. 53, no. 4, pp. 1036–1047, Jun. 2006. [10] M. Veerachary, T. Senjyu, and K. Uezato, “Neural-network-based maximum-power-point tracking of coupled-inductor interleaved-boostconverter-supplied PV system using fuzzy controller,” IEEE Trans. Ind. Electron., vol. 50, no. 4, pp. 749–758, Aug. 2003. [11] N. Kasa, T. Iida, and L. Chen, “Flyback inverter controlled by sensorless current MPPT for photovoltaic power system,” IEEE Trans. Ind. Electron., vol. 52, no. 4, pp. 1145–1152, Aug. 2005. [12] M. Veerachary, T. Senjyu, and K. Uezato, “Voltage-based maximum power point tracking control of PV system,” IEEE Trans. Aerosp. Electron. Syst., vol. 38, no. 1, pp. 262–270, Jan. 2002. [13] I. S. Kim, M. B. Kim, and M. J. Youn, “New maximum power point tracker using sliding-mode observer for estimation of solar array current in the grid-connected photovoltaic system,” IEEE Trans. Ind. Electron., vol. 53, no. 4, pp. 1027–1035, Jun. 2006. [14] H. Koizumi, T. Mizuno, T. Kaito, Y. Noda, N. Goshima, M. Kawasaki, K. Nagasaka, and K. Kurokawa, “A novel microcontroller for gridconnected photovoltaic systems,” IEEE Trans. Ind. Electron., vol. 53, no. 6, pp. 1889–1897, Dec. 2006. [15] W. Xiao, M. G. J. Lind, W. G. Dunford, and A. Capel, “Real-time identification of optimal operating points in photovoltaic power systems,” IEEE Trans. Ind. Electron., vol. 53, no. 4, pp. 1017–1026, Jun. 2006. [16] K. Yeong-Chau, L. Tsorng-Juu, and C. Jiann-Fuh, “Novel maximumpower-point-tracking controller for photovoltaic energy conversion system,” IEEE Trans. Ind. Electron., vol. 48, no. 3, pp. 594–601, Jun. 2001. [17] H. Chihchiang, L. Jongrong, and S. Chihming, “Implementation of a DSPcontrolled photovoltaic system with peak power tracking,” IEEE Trans. Ind. Electron., vol. 45, no. 1, pp. 99–107, Feb. 1998. [18] N. Femia, G. Petrone, G. Spagnuolo, and M. Vitelli, “Optimization of perturb and observe maximum power point tracking method,” IEEE Trans. Power Electron., vol. 20, no. 4, pp. 963–973, Jul. 2005. [19] K. H. Hussein, I. Muta, T. Hoshino, and M. Osakada, “Maximum photovoltaic power tracking: An algorithm for rapidly changing atmospheric conditions,” Proc. Inst. Electr. Eng.—Gener. Transm. Distrib., vol. 142, no. 1, pp. 59–64, Jan. 1995. [20] J. Galambos, J. Lechner, and E. Simiu, Extreme Value Theory and Applications. Boston, MA: Kluwer, 1994. [21] C. W. Gear, Numerical Initial Value Problems in Ordinary Differential Equations. Englewood Cliffs, NJ: Prentice-Hall, 1971. [22] U. M. Ascher and L. R. Petzold, Computer Methods for Ordinary Differential Equations and Differential-Algebraic Equations. Philadelphia, PA: SIAM, 1998. [23] H. W. Dommel, Error in Frequency Domain for Trapezoidal Rule of Integration. Vancouver, BC, Canada: Univ. British Columbia, 2006. EECE459 Class notes. [24] H. W. Dommel, EMTP Theory Book, 2nd ed. Vancouver, BC, Canada: Microtran Power Syst. Anal. Corporation, 1996. [25] W. Xiao, “A modified adaptive hill climbing maximum power point tracking (MPPT) control method for photovoltaic power systems,” M.A.Sc. thesis, Dept. Electr. Comput. Eng., Univ. British Columbia, Vancouver, BC, Canada, 2004. [26] H. Jeffreys and B. S. Jeffreys, Methods of Mathematical Physics, vol. 1. Cambridge, U.K.: Cambridge Univ. Press, 1988, p. 53. No. 3. [27] G. Arfken, Mathematical Methods for Physicists. Orlando, FL: Academic, 1985, pp. 428–436. [28] E. W. Weisstein. (2006, Mar.) “Newton’s method,” MathWorld-A Wolfram Web Resource. [Online]. Available: http://mathworld.wolfram. com/NewtonsMethod.html [29] M. Jantsch, M. Real, H. Häberlin, C. Whitaker, K. Kurokawa, G. Blässer, P. Kremer, and C. W. G. Verhoeve, “Measurement of PV maximum power point tracking performance,” Energy Res. Centre Netherlands, Petten, The Netherlands, 1997. RX97040. Weidong Xiao (S’03) received the M.A.Sc. degree in electrical engineering from the University of British Columbia, Vancouver, BC, Canada, in 2003, where he is currently working toward the Ph.D. degree. His research interests include power electronics and applications of renewable energy sources. William G. Dunford (S’78–M’81–SM’92) received the B.S. degree in engineering from the Imperial College London, London, U.K., and the Ph.D. degree from the University of Toronto, Toronto, ON, Canada. He is with the Clean Energy Research Centre, University of British Columbia, Vancouver, BC, Canada. He was also part of a team modeling satellite batteries at Alcatel, Toulouse, France. He has worked on photovoltaic applications for a number of years. His other interests include distributed systems in general with particular emphasis on efficiency, power quality, and automotive applications. Dr. Dunford was the General Chair of the IEEE Power Electronics Specialists Conference in 1986 and 2001. Authorized licensed use limited to: Weidong Xiao. Downloaded on October 22, 2008 at 19:33 from IEEE Xplore. Restrictions apply. XAIO et al.: APPLICATION OF CENTERED DIFFERENTIATION AND STEEPEST DESCENT TO MPPT Patrick R. Palmer (M’87) received the B.S. and Ph.D. degrees in electrical engineering from the Imperial College of Science and Technology, University of London, London, U.K., in 1982 and 1985, respectively. He joined the faculty of the Department of Engineering, University of Cambridge, Cambridge, U.K., in 1985. He is an Engineering Fellow (elected 1987) at St. Catharine’s College, University of Cambridge. He joined the Department of Electrical and Computer Engineering, University of British Columbia, Vancouver, BC, Canada, in 2004, returning to Cambridge as a Reader in electrical engineering in 2005. He has extensive publications in his areas of interest. He is the holder of two patents. His research is mainly concerned with the characterization and application of high-power semiconductor devices, computer analysis, simulation, and design of power devices and circuits, and he has further interests in fuel cell hybrid vehicles. Dr. Palmer is a Chartered Engineer in the U.K. 2549 Antoine Capel received the Ph.D. degree from the University of Toulouse, Toulouse, France. After teaching at Toulouse and at the University of Pernambouc, Récife, Brazil, he joined the European Space Agency as a Power System Engineer. In 1983, he joined Alcatel Espace, Toulouse, where he first managed the Power Supply Laboratory and was Head of the Power System Simulation Division. He is currently with the School of Engineering, Universitat Rovira i Virgili, Tarragona, Spain. He is the holder of five U.S. patents. Authorized licensed use limited to: Weidong Xiao. Downloaded on October 22, 2008 at 19:33 from IEEE Xplore. Restrictions apply.