Direct Current Motors - Alfred State College intranet site
advertisement

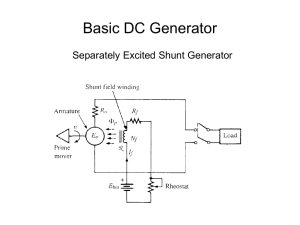
DC MOTORS Direct Current Motors The DC machine can operate as a generator and as a motor. Chap 5. Electrical Machines by Wildi, 6 e Lecturer: R. Alba-Flores Alfred State College Spring 2008 • When a DC machine operates as a generator, the input to the machine is mechanical power and the output is electrical power. • A prime mover rotates the armature of the DC machine, and the DC power is generated in the machine. • The prime mover can be a gas turbine, a diesel engine or an electrical motor. The main equation that describes both machines is: Eo = Z Φ n / 60 • When the DC machines operates as a motor, the input to the machine is electrical power and the output is mechanical power. Eo voltage between brushes (or induced voltage) (volts) Z total number of conductors on the armature Φ magnetic flux per pole (Webers) n speed of rotation (rpm) • If the armature is connected to a DC supply, the motor will develop mechanical torque and power. • DC motors can provide a wide range of accurate speed and torque control. • In both modes of operation (generator and motor) the armature winding rotates in the magnetic filed and carries current. DC motors are built the same way as generators. Example 1: DC generator The armature of a 1200 rpm generator has 12 slots. Each coil has 15 turns and the flux per pole is 0.04 Wb. Calculate the induced voltage in the generator. Consider the following permanent magnet DC generator Eo = Z Φ n / 60 Z total number of conductors on the armature Z = (12 coils) * (15 turns/coil) * (2 conductors/turn) = 360 conductors Eo = Z Φ n / 60 = (360)*(0.04)*(1200) / 60 = 288 volts • Assume the armature is initially at rest and a DC source connected. ES is • The armature has a resistance R and the magnetic field is created by a set of permanent magnets. • As soon as the switch is closed, a large current flows in the armature because its resistance is very low. • The forces between the permanent magnet and the magnetic field created by the current in the armature will create a Torque, causing the armature to rotate. 1 As soon as the armature begins to turn, an induced voltage generated. Eo is Eo = Z Φ n / 60 In the case of a motor, the induced voltage Eo is called counterelectromotive force (cemf) because its polarity always acts against the source of voltage Es As the speed increases, Eo, increases and the armature current decreases. Although the armature current decreases, the motor continues to accelerates until it reaches a maximum speed. At no-load this speed is produced by a The net voltage acting in the armature circuit is ( Es – Eo ) and therefore the resulting armature current is I = ( Es – Eo ) / R When the motor is at rest, the induced voltage starting current is Eo slightly less that Es Eo = 0, so that the I = Es / R Note that the starting current may be 20 to 30 times greater than the nominal full-load current in the motor. This will produce a powerful starting torque and a rapid acceleration of the armature. However, protection circuit should be added to avoid damaging the motor. Example 2: DC motor The armature of a permanent-magnet DC generator has a resistance of 3 ohms and generates a voltage of 100 volts when the speed is 1000 rpm. If the armature is connected to a source of 150 volts, calculate a) The starting current b) The counter EMF when the motor runs at 1200 rpm and at 1400 rpm. c) The armature current at 1200 rpm d) The armature current at 1400 rpm b) Because Eo = 100 v @ 1000 rpm; therefore Eo = 120 v @ 1200 rpm, and Eo = 140 v @ 1400 rpm c) The net voltage in the armature circuit at 1200rpm is Es – Eo = 150 – 120 = 30 V The corresponding armature current is I = (Es – Eo)/Ra = 30 / 3 = 10 A d) When the motor speed reaches 1400 rpm, the cemf will be 140 V, almost equal to the source voltage. Eo is called the counter-electromotive force (cemf) because its polarity always acts against the source voltage Es a) When the motor is at rest, I = Es / Ra (starting current) = 150/3 = 50 amperes Mechanical Power and Torque Eo = Z Φ n / 60 ---- 1 I = (Es – Eo)/Ra Z - total number of conductors in the armature Φ - flux per pole (Weber) n - speed of rotation (rpm) Under this conditions, the armature current is I = (Es – Eo)/Ra = 10 / 3 = 3.33 A Therefore the corresponding motor torque is much smaller than before. Torque The mechanical power Pm is given by 3 --- The electrical power supplied to the armature is: Pa = Es I Pa = (Eo + I Ra) I = Eo I + I2 Ra Pm = n T / 9.55 Pm =mechanical power (watts) T = torque (Newton-meter) n = speed of rotation ( rpm ) 9.55 is a constant for units (= 30 / π) Combining eqs. 1,2 and 3 we can solve for the torque I2 Ra is the heat dissipated in the armature Eo I is the electrical power that is converted into mechanical power ( this is the cemf multiplied by the armature current) 2 --- P = Eo I T = Z Φ I / 2π P Mechnaical power developed by the motor (Watts) Eo Induced voltage in the armature (cemf) (volts) I Total current supplied to the armature (amperes) 2 Armature Speed Control Speed of Rotation If the flux Φ per pole is kept constant, then the speed of the motor depends only on the armature voltage Es Eo = Z Φ n / 60 In general Eo ≈ Es, therefore Es = Z Φ n / 60, and n = 60 Es / Z Φ n - speed of rotation (rpm) Es - Armature voltage (volts) Z - total number of armature conductors Φ - flux per pole n By incrementing or decrementing Es the motor speed can be controlled. Variable speed by armature voltage control was first used in the early 1930s using a system involving a constant speed AC motor driving a DC generator. The generator's DC output was varied using a rheostat to vary the field excitation and the resulting variable voltage DC was used to power the armature circuit of another DC machine used as a motor. This system is called a WardLeonard system. n = 60 Es / Z Φ Rheostat Speed Control Field Speed Control • Rheostat in series with the armature • Varying Φ and keeping Es constant • The current in the rheostat produces a voltage drop which subtract from the fixed source voltage Es • Here a rheostat with the field. Rf is connected in series • As Ix diminish, the flux Φ will diminish, therefore the speed will increase. • This method enables us to reduce the speed below its nominal speed n = 60 Es / Z Φ n = 60 Es / Z Φ This method is only recommended for small motors because a lot of power and heat is wasted in the rheostat, and the overall efficiency is low. • Despite the weaker filed, the motor develops a greater torque. It will accelerate until Eo is again almost equal to Es. • This method is used when the motor has to run above its rated speed. Shunt Motor Under Load a) b) c) d) Consider a shunt motor rotating at 1200 rpm that is fed by a 120V source. Assume that the line current is 50 A and the shunt-field resistance is 100 ohms. If the armature resistance is 0.2 ohms calculate The field current The current in the armature The cemf The mechanical power developed by the motor (hp) R shunt field = 100 ohms Ra = 0.2 ohms a) The field current is Ix = 120 / 100 = 1.2 A The armature current is Ia = 50 – 1.2 = 48.8 A b) The voltage drop due to armature resistance is Ia Ra = 48.8 (0.2) = 9.76 V I = 50 A Es = 120 V The cemf generated by the armature is Eo = 120 – 9.76 = 110.24 V Ix= Ia = Eo = P= 3 C) Series Motor The total power supplied to the motor is In this type of motors the field is connected in series with the armature and therefore it must carry the full armature current. Pi = E I = 120 (50) = 6000 W The voltage across the armature is • When the current is large, the flux is large. E = 120 V • If the load current drops to half its normal value, the flux diminish by half so the speed doubles The power absorbed by the armature is Pa = E Ia = 120 (48.8) = 5856 W Eo = Z Φ n / 60 The power dissipated in the armature is P = Ia2R = (48.8)2 (0.2) = 476.3 W n = 60 Eo / Z Φ The Mechanical Power developed by the armature is Pmech = Pa - P = 5856 – 476.3 = 5379.7 W Pmech = 5379.7 / 746 = 7.2 hp Z - total number of conductors in the armature Φ - flux per pole (Weber) n - speed of rotation (rpm) • Series motors are used on equipment requiring a high starting torque • They are also used to drive devices which must run at high speed at light loads Series Motor (cont.) • This series field is composed of a few turns of wire having a cross section sufficient large to carry the current • In a series motor the magnetic flux per pole depends upon the armature current and hence, upon the load. (In a shunt motor the magnetic flux per pole is constant). In a series motor at full-load, the flux per pole is the same as that of a shunt motor of identical power and speed. • When the series motor starts up, the armature current is higher than normal, therefore the flux per pole is also greater than normal. Series Motor (cont.) • If the series motor operates at less that full-load, the armature current and the flux per pole are smaller than normal, and therefore, the speed rise. • Care has to be taken if the load is small because the speed may rise to dangerous high values. • Series motors must NEVER be operated at no-load • The starting torque of a series motor is much greater that that of a shunt motor. Per-unit typical curves series and a shunt motors Example A 15 hp, 240 V, 1780 rpm DC series motor has a full-load rated current of 54 amperes. Assume that its operating characteristics are given by the previous per-unit curve. Compute a) The current and speed when the load torque is 24 N-m b) The efficiency under this conditions For a full load we have: base power: P = 15hp = (15)*(746) =11.190 kW base current: I = 54 A base speed: n = 1780 rpm base torque: T = 9.55 P / n = 9.55*(11.190kW)/1780 rpm = 60 N-m Typical speed-torque and current-torque characteristic of a series motor Typical speed-torque and current-torque characteristic of a shunt motor a) A load torque T = 24 N-m, means a per-unit value T(pu) = 24/60 = 0.4 From the per-unit curve we see that for T(pu)= 0.4, we have a speed of 1.4 pu n = n(pu) * n = 1.4 *(1780 rpm) = 2492 rpm From the per-unit curve we see that for T(pu)= 0.4, we have a current of 0.6 pu I = I(pu) * I = 0.6*(54A) = 32.4 A 4 b) Compound Motor For the efficiency we have: Mechanical power: Electrical power: Po = n T / 9.55 = 2492 *(24) / 9.55 = 6263 W Pi = E I = 240 * (32.4) = 7776 W Efficiency: η = Po / Pi = 6263 W / 7776 W = 0.805 = 80.5 % • A Compound DC Motor has a series field and a shunt field. • When a compound motor runs at no-load, the armature current Ia in the series is low and the mmf of the series field is negligible. • However the shunt field is fully excited by current Ix and so the motor behaves like a shunt machine: it does not tend to run away at no-load. Compound Motor (cont.) • As the load increases, the mmf of the series increases but the mmf of the shunt field remains constant. The total mmf is greater under load that at no-load. • The motor speed falls with increasing load and the speed drop from no-load to full-load. Differential Compound Motor If the series field is connected so that it opposes the shunt field, we obtain a Differential Compound Motor. • In the differential compound motor, the total mmf decreases with increasing load. • The motor speed rises as the load increases, and this may lead to instability. • The differential compound motor has very few applications. Typical Speed-Torque characteristics of various DC motors Reversing the direction of rotation of a DC motor To reverse the direction of rotation • reverse the armature connections • reverse the shunt and series field connections Original connections of a compound motor Reversing the armature connections to reverse the direction of rotation Reversing the field connections to reverse the direction of rotation 5 Starting a Shunt Motor It we apply full voltage to a stationary shunt motor, the starting current in the armature will be very high and the we run the risk of: One way is to connect a rheostat in series with the armature. The resistance is gradually reduced as the motor accelerates and is eventually eliminated entirely when the machine has attained full speed. A manual face-plate starter for a shunt motor is: • burning out the armature • damaging the commutator and brushes, due to heavy sparking • snapping off the shaft due to mechanical shock • damaging the driven equipment because of the sudden mechanical shock Therefore all DC motors must be provided with a means to limit the starting current to reasonable values, usually between 1½ to 2 the full-load current. Cooper contacts are connected to current-limited resistors (R1, R2, etc.) • The voltage Es immediately causes full field current Ix to flow, but the armature current I is limited by the four resistors in the starter box. • The motor begins to turn and, as the cemf armature current decrements. Eo builds up, the • When the motor speed reaches a constant value, the contact arm is pulled to the next contact, removing resistor R1 from the armature circuit. Therefore the current jumps to a higher value and the motor starts accelerating again to the next highest speed. Stopping a Motor • When the contact arm touches the last contact, the arm is magnetically held in this position by a small electromagnet which is in series with the shunt field. • If the supply voltage is suddenly interrupted, or if the field excitation is cut, the electromagnet releases the contact arm, allowing it to return to its initial position. Dynamic Braking • When a large DC motor is coupled to a heavy inertial load, it may take an hour or more for the system to come to a halt. • One way to brake the motor is by mechanical friction • A more practical way is to brake the motor electrically, this is done by circulating a reverse current in the armature • Dynamic Braking • Plugging • If the switch is suddenly open, the motor will continue to turn, but its speed will gradually drop due to friction. • Because the shunt is still excited then Eo continues to exists and the motor behaves as a generator. • Now if the switch is closed to connect the external resistor R. The voltage Eo will produce an armature current I2. This current flows in the opposite direction to the original current I1. • A reverse torque is developed and this will bring the machine to a rapid and smooth stop. 6 Dynamic Braking Plugging A DC motor can be stopped more rapidly by using the method called Plugging. It consists of suddenly reversing the armature currents by reversing the terminals of the source: • In practice R is chosen so that the initial braking current is about twice the rated motor current. Then the initial braking torque is twice the normal torque of the motor. • The speed drops quickly at first and then more slowly, as the armature comes to a halt. • The net voltage acting on the armature circuit becomes (Eo + Es) • This net voltage would produce an enormous reverse current, around 50 times greater than the full-load armature current. • This current will destroy the machine. • To prevent this, a resistor R in series with the reversing circuit is added. Speed versus time curves for various braking methods 7