Surface Water Detection System (SWDS) Prototype Product Specification 1
advertisement
 Prototype Product Specification 1")
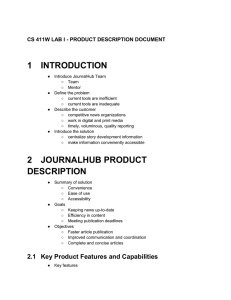
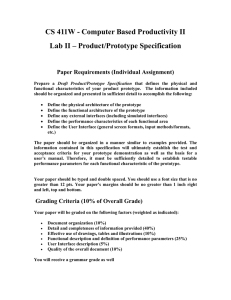
Surface Water Detection System (SWDS) Prototype Product Specification Running head: LAB II – SWDS PROTOTYPE PRODUCT SPECIFICATION Lab II- Surface Water Detection System (SWDS) Prototype Product Specification Jill Mostoller CS411 Professor Gene Price Old Dominion University March 21st, 2011 Version Two 1 Surface Water Detection System (SWDS) Prototype Product Specification 2 Table of Contents 1. INTRODUCTION……………………………………………………………………...4 1.1 Purpose …………………………………………………………………….....5 1.2 Scope ………………………………………………………………………....6 1.3 Definitions, Acronyms, and Abbreviations …………………………………10 1.4 References …………………………………………………………………...13 1.5 Overview……………………………………………………………………..13 2. GENERAL DESCRIPTION ………………………………………………………….13 2.1 Prototype Architecture Description …………………………………………14 2.2 Prototype Functional Description …………………………………………...15 2.3 External Interfaces…………………………………………………………...16 2.3.1 Hardware Interfaces………………………………………………..17 2.3.2 Software Interfaces………………………………………………...17 2.3.3 User Interfaces …………………………………………………….17 3. SPECIFIC REQUIREMENTS ...……………………………………………………..19 3.1 Functional Requirements ……………………………………………………19 3.1.1 Closed-System Remote Device ……………………………………19 3.1.2 Onsite Data Acquisition Device …………………………………...20 3.1.3 Networked-System Remote Device………………………………..21 3.1.4 Data Acquisition Host ……………………………………………..21 3.1.5 Administrative Web Application ………………………………….21 3.1.6 Public Web Server ………………………………………………...22 3.2 Performance Requirements ………………………………………………….23 3.3 Assumptions, Constraints and Dependencies ……………………………….23 3.3.1 Assumptions ……………………………………………………….24 3.3.2 Constraints ………………………………………………………...25 3.3.3 Dependencies ……………………………………………………...26 3.4 Non-Functional Requirements ………………………………………………26 3.4.1 Security ……………………………………………………………26 3.4.2 Maintainability …………………………………………………….27 3.4.3 Reliability ………………………………………………………….27 List of Figures Figure 1. Technical Overview ……………………………………………………………6 Figure 2. Major Functional Component Diagram……………………………………….14 Figure 3. Closed System Functional Breakdown………………………………………..15 Figure 4. Networked System Functional Breakdown …………………………………...16 Figure 5. Insurance Agency GUI………………………………………………………...18 Figure 6. City User GUI…………………………………………………………………18 Surface Water Detection System (SWDS) Prototype Product Specification 3 List of Tables Table 1. Prototype vs. Real-World Implementation Comparison ………………………...8 Table 2. Feature Comparison ……………………………………………………………..9 Table 3. Effects of Assumptions, Dependencies, and Constraints on Requirements…...23 [This space intentionally left blank] Surface Water Detection System (SWDS) Prototype Product Specification 4 Lab II – SWDS Prototype Product Specification 1 INTRODUCTION In the United States, floods are one of the most frequently occurring natural disasters (FEMA, 2010). Unfortunately for drivers, there currently is no contiguous alert system to warn when roadways are flooded and therefore unsafe to travel. With no system currently in place, drivers are forced to use their own judgment for both the water depth and the amount of water safe for their vehicle to pass through. This is not an easy decision to make and this human error can result in vehicle damage and personal injury. Tens of thousands of cars are damaged by floodwaters every year (CARFAX, n.d.). Drivers whose vehicles can be repaired incur large costs, where as others may even need to purchase a completely new car. The costs associated with the vehicle damage are nothing compared to those of hospital bills and in some instances the cost of one’s life. According to the National Climatic Data Center (2005), 42% of fatalities caused by flooding involved vehicles in the United States. While the safety of the average American driver is the biggest concern, a city incurring large costs because of flooded roadways is also an issue. The work force needed to rescue stranded motorists, as well as resources needed to block off roadways to prevent any more accidents both cost time and money. When vehicles are waterlogged and therefore cannot be driven, they are towed at the city’s expense. An effective alert system could help prevent vehicle damage, personal injury, and extraneous use in city resources in situations where a driver cannot accurately assess the water depth in the roads. The Surface Water Detection System (SWDS) was developed to aid drivers in evaluating road conditions during flooding. SWDS is designed to detect Surface Water Detection System (SWDS) Prototype Product Specification 5 when roadways have a level of water deemed unsafe for vehicles to drive through without causing damage. The system alerts drivers with the use of a warning sign on the road to notify if a detour is necessary. With the use of the Bing Maps API and RSS feeds, drivers can also check road conditions before even starting their commute. The main goal of the SWDS is to make drivers aware of flooding so they can take the necessary steps to protect themselves and their vehicles. 1.1 Purpose The Surface Water Detection System is a hardware-oriented solution that detects the change in depth between the road and the sensor. This information is then used to determine whether the roads are safe for motorists. If a sensor detects flooding, a signal is sent to a localized flashing road sign and to a centralized data center. The flashing road sign serves as an immediate warning for current travelers. The centralized data center collects the information through the networked system and allows a user to see a map of local road flooding before they begin their drive. This information is also used in RSS feeds so the user can get updates while away from the original web application. The data center stores the information as well, which provides an archive for the user for historical and statistical analysis. The Surface Water Detection System starts with our baseline package and has two proposed upgrades. In Figure 1, the system is broken down into each package. “Remote” represents the baseline package, “centralized control” represents the network package and “End-User Applications” represents the application package. The baseline package consists of a closed system setup. This closed system would be ideal for remote locations. Surface Water Detection System (SWDS) Prototype Product Specification 6 A sensor in a ruggedized housing would be installed along with a warning sign. The microcontroller that controls the sensor has the ability to store a limited amount of data for historical or statistical analysis. The system would allow embedded algorithms for determining erroneous data for a more accurate alert. Figure 1. Technical Overview The networked system consists of multiple sensors that are all connected and send information to a centralized data center. This allows for easier maintainability for the software needing upgrades and allows the city user to determine if a sensor is malfunctioning from a remote location. The information sent to the centralized data center is then used with the third package, the end-user applications. The depth measurements are used to display road conditions on a map application, as well as sending alerts to drivers using the syndication service. Although the main benefactor from this product is the average driver, the primary customers consist of city governments. When roads flood and become hazardous to drivers, it is the local government’s responsibility to assist motorists who may become stranded or injured as a result. It is also their responsibility to try to prevent drivers from passing through the waters. Currently, cities block off roadways with police cars and use police officers and rescue workers to help divert traffic. This extraneous use of resources, along with the cost of towing or rescuing stranded drivers, adds to the city’s expenses. Surface Water Detection System (SWDS) Prototype Product Specification 7 Aside from decreasing ancillary costs, the local government will build good public relations by being concerned with the safety of its citizens. The decrease in floodrelated accidents will not only make the city look appealing, but will give the voters confidence in choosing the incumbent for re-election. With city governments, the system would be sold through bid proposals, but our product has a commercial front-end that allows it to be sold to private citizens, as well. Individuals can benefit from the Surface Water Detection System if they have a particular interest in knowing water levels at a given time. This could be especially useful for those living near water or whose house is below sea level. The SWDS could be used to detect the water levels at a boat dock or to give homeowners peace of mind that they will not come home to a flooded basement. 1.2 Scope The prototype of the SWDS solution demonstrates the feasibility of using an ultrasonic sensor to determine if a roadway is flooded. The prototype allows us to demonstrate how the sensor data sorting algorithms will work, as well as allow us to simulate a networked system of sensors. Sample data that is simulated from the prototype sensor and networked system will supply information to our web-based applications as well. The prototype will serve as a demonstration to mitigate any risks associated with the final solution and proving the real world product concept for the customer. The prototype will need to be limited to one actual sensor for simplicity. A networked system will be generated in a simulation to demonstrate the software we are developing for the network and to collect data for our web-based solutions. The Bing Maps and RSS feed Surface Water Detection System (SWDS) Prototype Product Specification 8 aspects of our real world product will be demonstrated with our simulated data from the networked system. The main goal of our prototype is to show proof of concept to our customers so that they feel confident purchasing the real world product. The prototype must demonstrate all features of the real world product through simulated data. Though the main software components would be the same between the prototype and real world product, the hardware is much different for a cost effective demonstration. In Table 1, the prototype components are compared to those of the real world product to illustrate the main difference between the two systems. Table 1. Prototype vs. Real-World Implementation Comparison Surface Water Detection System (SWDS) Prototype Product Specification 9 By using an actual sensor, we can demonstrate the sensor’s ability to find the depth. We can also show how our algorithm will sort data to determine whether the roads are flooded or if debris or cars are causing erroneous readings. All of the data from the sensor is sent to the microcontroller, which acts as an intermediate to our database that will store the simulated information. The only difference between our web application packages in the prototype versus the real world product would be the customizable wed front to store both the Bing Maps interactive maps and the RSS feed sign up. Both the Bing Maps demonstration and RSS Feed are available in our prototype. The SWDS prototype shares many of the same features and capabilities of the real world product. The prototype is able to calculate depth measurements and stores this information for historical and statistical analysis. The information can also be passed to our web-based applications in our prototype. In Table 2, a feature comparison is used to show the similarities in the real world product and prototype. Features Real World Product Prototype Depth measurements Included Included Data archive Included, stored on database. Bing Maps Included for both microcontroller and centralized data center (server). Included RSS feed Included Included, Norfolk is used as an example. Included Customizable web-front Included Not Included Table 2. Feature Comparison Surface Water Detection System (SWDS) Prototype Product Specification 10 1.3 Definitions Acronyms, and Abbreviations Administrative Web Application (AWA): Multipurpose portal containing management tools for administering remote devices. Algorithm: A precise rule or set of rules specifying how to solve a problem. Annual software license: A legal contract governing the usage of software that is updated once a year. Application Programming Interface (API): Software implemented to allow for simpler and more abstracted interactions with other software. Baseline package: The basic closed-system version of the flood detection system that includes the ultrasonic sensor, microcontroller, ruggedized housing, and flashing warning sign. This is best suited for remote locations where a sensor network would be impractical. Bid proposal: An explanation of products and services given with an estimated cost. Centralized data center: The software and hardware that acts a central point for collecting the sensor data transmissions over a network and recording their values into a database. Client: Any end-system that is connected to a network. Closed system: A single ultrasonic sensor, microcontroller, ruggedized housing, and warning sign set up that has no network interface. Closed-System Remote Device (CSRD): Combination of components which are in charge of gathering information and onsite data logging. Surface Water Detection System (SWDS) Prototype Product Specification 11 Commercial front-end: An entity that provides some means, via website or physical location, to sell a product. These are direct whose primary goal is to sell its company’s deliverables to a targeted market. Data Acquisition Host (DAH): Software component in charge of receiving information from remote sensors and logging to the database. Embedded data store: The ability to store data on the microcontroller. Flooding: An inundated area of roadway that is considered impassible due to an influx of water. Global Positioning System (GPS): A navigational system that pinpoints latitude and longitude of a location using stationary satellites. Bing Maps API: A technology created by Bing that utilizes maps to support a variety of uses, typically displaying related locations in map form through a web browser. Graphical User Interface (GUI): A user-friendly interface that allows easy access to an applications features, which uses a mouse and keyboard as input devices. Microcontroller: A small computer on a chip that is used to control electronic devices. Modularized: Development technique which involves breaking a unified process or idea into coherent segments for the purpose of abstraction or simplicity. Multi-sensor network: Several sensor installations connected by a network infrastructure that relay measurements back to a centralized data center. Network: A system of interconnected electronic components or circuits. Networked-System Remote Device (NSRD): Combination of components which are in charge of gathering and communicating information over a network to a centralized location. Surface Water Detection System (SWDS) Prototype Product Specification 12 Onsite Data Acquisition Device (ODAD): Device capable of configuring the CSRD and downloading its stored data. Prototype: Logical step in the development process demonstrating the real world potential of a concept. Public Web Server (PWS): Computer that hosts the public website and web services. Real time data: Information that is collected in the actual time the process is occurring. Really Simple Syndication (RSS): Formatted XML used to provide subscribers with information updated on a regular basis. Risk analysis: Identifying and assessing factors that may compromise the success of a project. Ruggedized housing: An enclosure designed to protect an electronic device such as a field sensor from the elements. Server: A computer used to accept incoming requests and information over a network, and in-turn, generates and transmits data back to another user or computer (client). Ultrasonic sensor: A sensor that calculates changes in depth using high frequency sound waves. URL: Uniform Resource Locator User based applications: Programs developed for the purpose of providing services to users. Warning sign: A type of traffic sign that indicates a hazard on the road that may not be readily apparent to a driver. Web Server: A computer that delivers content from websites over the Internet. Surface Water Detection System (SWDS) Prototype Product Specification 13 1.4 References CARFAX Flood Car Tips: Avoid flood-damaged cars, autos, and vehicles. (n.d.). CARFAX - Vehicle History Reports and VIN number check. Retrieved February 7, 2011, from http://www.carfax.com/car_buying/flood_damage_cars.cfx Flood Maps, Insurance, and Information. (2010, August 11). FEMA. Retrieved February 7, 2011, from www.fema.gov/hazard/flood/info.shtm Mostoller, Jill. Lab I-Surface Water Detection System Product Description. February 9th, 2011. Storm Data Publications. (2010, April 8). NCDC Climate Products. Retrieved February 7, 2011, from www.ncdc.noaa.gov/oa/climate/sd/ 1.5 Overview This prototype specification will outline the hardware and software needed for the prototype development. In the remaining sections of this paper, details will be provided about the major hardware and software components. Additionally, the hardware and software architecture for the prototype will be broken down. An explanation of the functionality of our prototype will be presented and the use of any external interfaces will be addressed, as well. 2 GENERAL DESCRIPTION The prototype of the SWDS solution demonstrates the feasibility of using an ultrasonic sensor to determine if a roadway is flooded. The prototype allows us to demonstrate how the sensor data sorting algorithms will work, as well as allow us to simulate a networked system of sensors. Sample data that is simulated from the prototype Surface Water Detection System (SWDS) Prototype Product Specification 14 sensor and networked system will supply information to our web-based applications, as well. The prototype will serve as a demonstration to mitigate any risks associated with the final solution and proving the real world product concept for the customer. The prototype will need to be limited to one actual sensor for simplicity. A networked system will be generated in a simulation to demonstrate the software we are developing for the network and to collect data for our web-based solutions. The Bing Maps and RSS feed aspects of our real world product will be demonstrated with our simulated data from the networked system. 2.1 Prototype Architecture Description The major functional components for the Surface Water Detection System are presented in Figure 2. Our prototype is a smaller scale of the real world product but retains the functionality of each package we offer. The SWDS prototype has six major components. The CSRD includes the ultrasonic sensor that calculates the depth measurements. Similar to the CSRD, we have the NSRD, which are any ultrasonic sensors that are networked together. Each calculates the depth measurements, but they are associated with two separate packages. Closed System Remote Device Networked System Remote Device Onsite Data Acquisition Device Administrative Web Application Data Acquisition Host Figure 2. Major Functional Component Diagram Public Web Server Database Surface Water Detection System (SWDS) Prototype Product Specification 15 Both the CSRD and NSRD will have a data acquisition host to obtain archival data from the sensors. The CSRD will need an ODAD that can abstract this historical and archival information. The NSRD sends the data through the network to a DAH to store the data. The last two important components of the prototype both pertain to our “EndUser Application” package. The administrative web application and public web server are both used to provide access to the depth measurements and archival data by multiple user types. The PWS is also used in our news feed, Bing Maps and RSS services. 2.2 Prototype Functional Description The first component of our prototype is the Closed System Remote Device (CSRD). This device consists of the ultrasonic sensor, microcontroller and eBox. In Figure 3, a functional breakdown is shown for the simplistic system. The CSRD stores the depth measurements that it obtains from the sensor and logs the data. It then processes the data through our filtering algorithm to throw out any erroneous measurements. If the water level is considered too high, the CSRD triggers our warning sign. An Onsite Data Acquisition Device (ODAD) will be used to get any logged data from the CSRD. It will also be used to set the measurement offset for the device and update the device software. Closed System Remote Device Device Configuration Store Logged Data Get Onsite Data Acquisition Device Figure 3. Closed System Functional Breakdown The Networked System Remote Device (NSRD) has almost the same functionality as the CSRD. The difference between the two devices is the NSRD is attached to a network therefore its data is easily obtainable. It is also easier to update the software over the network. In Figure 4, the NSRD sends a request to the database to get the device Surface Water Detection System (SWDS) Prototype Product Specification 16 configuration. This configuration is stored on the database by the Administrative Web Application (AWA). Administrative Store Web Get Application Device Configuration Sensor Data Sensor Data Database Sensor Data Get Public Web Server Store Data Acquisition Host Sensor Data Device Configuration Get Networked System Remote Device Figure 4. Networked System Functional Breakdown The AWA can also retrieve data on depth measurements from the database. The NSRD sends the information through the Data Acquisition Host (DAH) and the DAH stores the information on the database. Once the AWA retrieves the information from the database, the user can view historical data or manage the remote device. The user can set the measurement offset remotely and any updates to the system can be added. The Public Web Server (PWS) can also retrieve information from the database. Figure 5 illustrates one of the features supported by the PWS. Our Bing Maps application will obtain all the depth measurement information from the PWS. Our news feed and RSS will also use the PWS to keep the users up-to-date on road conditions on their commute. 2.3 External Interfaces The external interfaces for the Surface Water Detection System prototype are similar to those in the real world product. There are obvious differences in the hardware Surface Water Detection System (SWDS) Prototype Product Specification 17 interface, as well as the software interfaces. Our prototype solution relies more on software, where as the real world product would rely heavily on hardware interfaces. 2.3.1 Hardware Interfaces For our prototype, we will be using an ultrasonic sensor, microcontroller and eBox. We will also be using a development PC to store our database and web server so that we can simulate each aspect of our product. The ultrasonic sensor used in the prototype will have a shorter range than the one used in our real world product. The sensor will be connected to the microcontroller. The microcontroller will then be connected to the eBox and will represent the CSRD. Connecting the eBox to the development PC will represent the NSRD. 2.3.2 Software Interfaces Our prototype relies more on software than our real world product. We only have one physical sensor, microcontroller and eBox, so other sensors will need to be simulated using software. We will maintain a database to store the information that comes from our physical sensor and the simulated sensors. We will also host a web server that extracts depth measurements from our database and uses the information to update Bing Maps. 2.3.3 User Interfaces The prototype will offer a web front for a user to log into. Figure 5 shows how the user can obtain historical archived data. This website will also demonstrate how the user can look up current depth measurements which is shown in Figure 6. The real world product will have RSS capabilities but this will not be included in the prototype of the system. Surface Water Detection System (SWDS) Prototype Product Specification 18 Figure 5. Insurance Agency GUI Figure 6. City User GUI Surface Water Detection System (SWDS) Prototype Product Specification 19 3 SPECIFIC REQUIREMENTS 3.1 Functional Requirements 3.1.1 Closed-System Remote Device (Marissa Hornbrook) The Closed-System Remote Device (hereafter referred to as CSRD) operates by obtaining measurement data from the ultrasonic sensor and processing the data by filtering it through the logic algorithm mentioned previously. The data is stored locally and a copy of the device’s settings is kept inside it for configuration purposes. During a collaborative session, a list of requirements was created to further detail the closed system and they are as follows: 1. The CSRD will be preprogrammed to accept measurement data directly from the sensor. 2. The CSRD will be preprogrammed with filtering logic capable of discarding erroneous data. 3. The CSRD will record data from the sensor to its internal storage device. 4. The CSRD will activate a flashing warning sign on the road when the incoming measurements record a depth that sets off a preprogrammed trigger. 5. The CSRD will provide a program that allows a technician to configure the device and copy its local storage of sensor measurement data via a network protocol. (Telnet, HTTP, etc.) 6. The CSRD will keep a local copy of its own configuration comprised of the following items: a. Unique ID: An identifier unique to each sensor b. Name: To establish a location, e.g., corner of Main St. and Route 44. Surface Water Detection System (SWDS) Prototype Product Specification 20 c. Latitude/Longitude: The global position utilized by Bing MapsTM. d. Offset: The distance from the sensor to the road will be recorded once and set as the zero marker. Any distance beyond that is the offset and will be viable data. e. Threshold: Preprogrammed trigger that will activate the flashing road sign. f. Increment: Measurement fluctuation g. IP address: This is to coordinate with the Data Acquisition Host to obtain measurements from the closed system since the data is not being transferred to a database over a network. 3.1.2 Onsite Data Acquisition Device (ODAD) (Eric Boyd) This function defines interactions with the CSRD to collect sensor measurement data from the CSRD’s local storage, and gives the onsite operator the ability to modify the CSRD’s configuration file. The following functional requirements shall be provided: 1. An onsite operator is able to connect to the CSRD via physical link such as Ethernet or Serial cable to provide access to the CSRD’s configuration program over some network protocol such as Telnet or HTTP. 2. An onsite operator, once connected to the CSRD, can download sensor measurement data from the CSRD’s local storage to free device space. 3. An onsite operator, once connected to the CSRD, can configure the CSRD via the CSRD’s configuration program. 3.1.3 Networked-System Remote Device (NSRD) (Eric Boyd) This function encompasses those of the CSRD by allowing the NSRD to act as a CSRD if network connectivity is lost. In addition, the NSRD transmits its sensor Surface Water Detection System (SWDS) Prototype Product Specification 21 measurement data over a static network to a centralized collection node (the Data Acquisition Host) and provides a means for network operators to configure the NSRD and copy any of its local storage over the static network. The following functional requirements shall be provided: 1. The NSRD shall revert to CSRD operations if network connectivity is lost. 2. The NSRD checks for network connectivity at regularly timed intervals. 3. The NSRD resumes NSRD operations if after a time of lost network connectivity, the NSRD reestablishes network connectivity. 4. Once the NSRD establishes network connectivity, it sends its sensor measurement data over the network to the Data Acquisition Host (DAH). 3.1.4 Data Acquisition Host (DAH) (Eric Boyd) This function collects sensor measurement data from the NSRDs on the network and logs that data to a centralized database. The following functional requirements shall be provided: 1. The DAH receives data from NSRDs on the network. 2. The DAH logs data received from the NSRDs to a centralized database. 3.1.5 Administrative Web Application (AWA) (Eric Boyd) This function provides administrative services for querying the centralized, and monitoring and configuring NSRDs on the network. The following functional requirements are provided: 1. The AWA provides a graphical display of the status of the NSRDs on the network. Surface Water Detection System (SWDS) Prototype Product Specification 22 2. The AWA provides a graphical user interface for remotely configuring a NSRD over the network. 3. The AWA provides a graphical user interface for querying the centralized database of sensor measurement data. 4. Queries of the centralized database can be performed according to both a particular set of NSRDs, and a specific date and time range. 3.1.6 Public Web Server (PWS) (Eric Boyd) This function provides a public available interactive website and web services to the general population. The website provides a news feed, alerting users to current inundations in the jurisdiction, and an interactive Bing Maps section where users can view the real-time status of NSRDs in the jurisdiction. An interface for users to customize personal alerts of monitored sections along their daily routes is also provided. The following functional requirements shall be provided: 1. The PWS provides a news feed section on the homepage that informs users of any current inundations in the jurisdiction. 2. The PWS provides an interactive Bing Maps section where users can view the real-time status of the NSRDs in the jurisdiction. 3. The PWS provides a graphical user interface for allowing users to pick which NSRDs in the jurisdiction shall be included in their own personal alert. 3.2 Performance Requirements (Robert Dayton) 3.2.1 Networked and Closed System Remote Devices (Robert Dayton) Both shall meet the following performance requirements: 1. Accurately read distances from one inch to eight feet in one-inch increments. Surface Water Detection System (SWDS) Prototype Product Specification 23 2. Make incremental measurement readings on an adjustable schedule with a five second default interval. 3. Identify and filter out measurement reading jumps of greater than two inches over a 15 second period. 4. For local data logging, the remote device must be equipped with a storage device large enough to maintain historical data for at least six months. 3.2.2 Data Acquisition Host (DAH) (Robert Dayton) The DAH shall meet the following performance requirements: 1. Support receiving remote device sensor data at the same rate at which the sensor is making incremental measurement readings. 3.3 Assumptions, Constraints, and Dependencies (Jill Mostoller) There are various assumptions, constraints and dependencies in place for the prototype development. Table 3 contains a list of each assumption, dependency and constraint. The table also lists a brief description of the effects on the prototype requirements. [This space left intentionally blank] Surface Water Detection System (SWDS) Prototype Product Specification 24 Condition A simulated sensor will not stop functioning during a simulation. A customized web interface will not be used for each user type. Type Constraint Effect on Requirements Bounds the problem of malfunctioning sensors. Constraint Bounds the problem of designing multiple web interfaces with different functionalities. Bounds the problem of transmitting the data archives and updating the software of the closed system. Bounds the problem of setting up a network for the city. Allows us to assume data is relevant and will be effective in alerting drivers in time. Allows for minimal data security. Allows us to only develop high-level algorithms for the centralized data center. Allows for minimal error checking when processing data archive requests. Allows us to assume the data-sorting algorithm is correct. A method will be developed Constraint by the customer to transmit data locally from a closed system. The city already has a network set up that we can piggyback. Data transmission delay will not be large enough to effect real time results. Constraint Data collected is not sensitive in any way. The microcontroller will not perform any data processing. The user will not look up data archives for invalid dates. Any spike in data will be regarded as an obstruction (such as a vehicle) and will be thrown out. The eBox will be able to support the microcontroller. Assumption The physical sensor is available and functioning. Dependency Assumption Assumption Assumption Assumption Dependency The prototype will rely on the development PC to run the data sorting algorithms. The prototype will rely exclusively on simulated sensors. Table 3. Effects of Assumptions, Dependencies, and Constraints on Requirements 3.3.1 Assumptions Five assumptions are being made for our prototype. Our first and most important assumption is that any spike in data will be thrown out. This spike in depth level would Surface Water Detection System (SWDS) Prototype Product Specification 25 indicate an obstruction, such as a vehicle, in the road and should be caught by our datasorting algorithm. Our second assumption is that the data by the sensor is not sensitive in any way. The system will not require extensive security for the information collected because water depth measurements would not classify as confidential material. The third assumption for our prototype is that the website user will not try to access data archives for invalid dates. These include both dates that do not exist, as well as dates that precede the installation of the system. This assumption will allow minimal error checking with the data archive retrieval. Another assumption our prototype has is that the microcontroller does not perform any data processing. This allows us to focus on developing our algorithms solely in a higher-level language that would not be supported by the microcontroller. Our final assumption is that the data transmission delay from the sensor to the centralized data center and the warning sign will not be large. The system will be able to detect dangerous water levels and warn drivers within a one-minute timespan of the event occurring. 3.3.2 Constraints We have four constraints for our prototype to help limit the scope. Our first constraint is that our simulated sensors will not malfunction during a given simulation. This will simplify our simulation program and not require us to address sensor failures. In the real world product, a city engineer will attend to any malfunctioning sensors in person. Our second constraint is that there will be a generalized web front to show the website components of our prototype. In the real world product, we will have three user types, city users, insurance company users and general public users. For the purpose of Surface Water Detection System (SWDS) Prototype Product Specification 26 our prototype, will be developing a web front for the user type with the most functionality, i.e., the city users. The third and fourth constraints bound the problems of setting up a network and transmitting data from a closed system. The third constraint is that the city will already have a network for us to piggyback. With this constraint, we will not need to worry about setting up a reliable network to transfer data to the centralized data center. The fourth constraint pertains to only the closed system. The city will need to develop a way, e.g., through Bluetooth, to transmit the data archives and update the software of the closed system sensors. 3.3.3 Dependencies There have been two dependencies identified for our prototype. The first dependency is that the physical sensor is available and functional. If the physical sensor cannot be obtained or is broken, we will need to exclusively use simulated sensors. The second dependency is that the eBox is able connect with the microcontroller. The eBox will hold the high-level sorting algorithms so if the microcontroller that controls the sensor cannot connect to the eBox, we will need to connect it to a development PC instead. 3.4 Non-Functional Requirements 3.4.1 Security (Katherine Kenyon) There are two main areas of concern with regards to securing the Surface Water Detection System; hardware and software. Securing the hardware involves ensuring the integrity of the ruggedized housing unit and the components inside. The ruggedized housing unit is designed to protect the inside components and withstand normal weather Surface Water Detection System (SWDS) Prototype Product Specification 27 conditions. Concerns for the ruggedized housing unit include: sabotage, vandalism, and accidents. Sabotage occurs when a person illegally tampers with the functioning of the system. Vandalism refers to the illegal modification of the ruggedized housing exterior to affect its appearance but not its functioning. Potential accidents include environmental damage from extreme weather conditions like a hurricane - or collision with moving automobiles. Vandalism, sabotage, and accidents can all be inhibited by placing the housing unit in a secure location as far away from traffic as possible and out of reach of potential criminals. Since the software components do not collect personal or private information security concerns are minimal. The software must be user-access protected to provide customized views to each type of user. The data does not need to be encrypted on the server because hacking attempts are unlikely and even if they do occur the stored data is public information. 3.4.2. Maintainability (Cassandra Rothrauff) The two main things that need to be maintained for the SWDS are the ultrasonic sensors and how to plan and maintain the data on the servers. The sensors can be physically stolen and broken due to bad weather. It is necessary to restore the failed product by contacting the local service station. The station will have electric engineers on the spot that will need to be equipped with the extra parts. Apart from replacing the parts, maintaining a database is constantly being monitored. Maintainability is achieved by modifying the software. Improvement and software changes in the environment will help monitor the database system. The employees located at each station will need to be fully knowledgeable of the software and how to fix the product. Surface Water Detection System (SWDS) Prototype Product Specification 28 3.4.3 Reliability (Chris Meier) The Surface Water Detection System’s prototype must be available 24/7 in order to accurately maintain the updated weather conditions information for the user GUI. In terms of the Insurance Agency and City GUIs, the availability can be somewhat more flexible. The sensor and microcontroller must be protected from the elements to insure this, by using a ruggedized housing. In addition, if the sensor data becomes erroneous and continuously misreads then a debugging procedure will be initiated and if this fails to remedy the problem, a technician will have to visit the sensor on site for manual troubleshooting. If the sensor or any of its components were to become compromised, it would no longer be able to maintain updated conditions and could create a problem. The SWDS Data Center will annually back up all data in the database to another disk, as a safeguard against any data corruption or disk failure.