Exploiting Homography in Camera-Projector Systems Tal Blum Jiazhi Ou
advertisement

Exploiting Homography in
Camera-Projector Systems
Tal Blum
Jiazhi Ou
Dec 11, 2003
[Sukthankar, Stockton & Mullin. ICCV-2001]
Road Map
Introduction
Projector-Camera Homography
Automatic Keystone Correction
Lines Detection
Demo
Conclusion
Introduction
The Situation:
A presentation system with a computer and a
projector
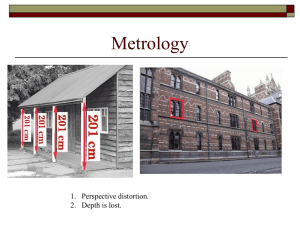
The Problem:
The projected image is warped if the projector is
not aligned manually
The Solution:
Automatic keystone correction using a camera
The Assumption
Uncalibrated camera, uncalibrated projector, we
know the resolution of the screen
Projector-Camera
Homography
Presumption: Points on a plane (board)
Given
x proji
i
pi y proj ,
1
xcam i
i
qi ycam ,
1
we want to estimate H:
qi H * pi
Projector-Camera
Homography
Linear Least-Squares:
Construct a 2N*9 matrix (N>=4):
p1T
0
L
...
0
0
p1
T
...
pN
T
1
T
xcam * p1
1
T
ycam * p1
...
N
T
ycam * p N
h equals to the eigenvector of L’*L
corresponding to the smallest eigenvalue
Automatic Keystone
Correction
Overview:
1. Compute
Projector-Camera
Homography
2. Compute
World-Camera
Homography
7.
Warp
Image
3. Compute
World-Projector
Homography
4. Compute
New Projected
Area on Board
6. Compute
Projector-Image
Homography
5. Compute
World-Image
Homography
Compute ProjectorCamera Homography
If we know p1, p2, p3, p4,
we can can estimate H1:
x proj xcam
H1 * y proj ycam
1 1
P1
P4
P3
P2
1 1 1024 1024
H1 * 1 768 768
1 p1
1 1
1
1
p2
p3
p4
Compute World-Camera
Homography
If we know p1, p2, p3, p4,
we can can estimate H2:
xworld xcam
H 2 * yworld ycam
1 1
P1
P4
P2
1
10000 10000
1
H 2 * 1 10000 10000 10000 p1
1
1
1
1
P3
p2
p3
p4
Compute World-Projector
Homography
x proj xcam
H1 * y proj ycam
1 1
xworld xcam
H 2 * yworld ycam
1 1
x proj xworld
1
H 2 * H1 * y proj yworld
1 1
1
H 3 H 2 * H1
Automatic Keystone
Correction
Overview:
1. Compute
Projector-Camera
Homography H1
2. Compute
World-Camera
Homography H2
3. Compute
World-Projector
Homography H3
4. Compute
New Projected
Area on Board
Compute New Projected Area
on Board
1. Find old projected area:
p
old _ area
1
, p2
old _ area
, p3
old _ area
, p4
old _ area
1 1 1024 1024
H 3 * 1 768 768
1
1 1
1
1
Compute New Projected Area
on Board
2. Find a largest rectangle in the old
projected area:
old _ area
p1
p1
new _ area
p2
p2
new _ area
p4
new _ area
p3
new _ area
p4
old _ area
p3
old _ area
old _ area
Compute World-Image
Homography
new _ area
new _ area
new _ area
new _ area
p3
p2
p4
Now we know p1
we can can estimate H4:
ximage xworld
H 4 * yimage yworld
1 1
1 1 1024 1024
new _ area
H 4 * 1 768 768
1 p1
1 1
1
1
p2
new _ area
p3
new _ area
p4
new _ area
Compute Projector-Image
Homography
x proj xworld
H 3 * y proj yworld
1 1
ximage xworld
H 4 * yimage yworld
1 1
x proj ximage
1
H 4 * H 3 * y proj yimage
1 1
1
H5 H 4 * H3
Automatic Keystone
Correction
Overview:
1. Compute
Projector-Camera
Homography H1
2. Compute
World-Camera
Homography H2
7. Warp Image:
For each pixel in
projector, find the
corresponding pixel in
the image using H5
3. Compute
World-Projector
Homography H3
4. Compute
New Projected
Area on Board
6. Compute
Projector-Image
Homography H5
5. Compute
World-Image
Homography H4
Road Map
Introduction
Projector-Camera Homography
Automatic Keystone Correction
Lines Detection
Demo
Conclusion
Lines Detection
We used our
implementation for the
lines detection
Problems in lines
detection include:
– Noise due to low quality
camera
– Need to be invariant to
different room settings
and different lighting
conditions
– The camera might be in
different distances from
the screen.
Lines Detection
implementation
Stages
– Brightness Normalization
– Canny edge detection
for k=1 to 4
Compute the parameter distribution
Smooth the parameter space
Find the point in the k’th parameter space (R_k,Theta_k)
that has the maximal value and satisfy constraints.
Remove the points belonging to the lines found so far
from the parameter distribution
end
Brightness Normalization
Adjusting the intensity by linear
transformation so that the intensity range
would be [0,1]
Canny edge detection
For detecting the
projection coordinates
We use the
difference of an
image with a white
projection and an
image without it.
The canny image is
much cleaner &
easier to deal with.
Counting Over Parameter
Space
Lines are represented as
(R,Theta)
Count for each line how many
points go through it
Smooth with a Gaussian kernel
– Depends on distance from the
center
Sampling problems
– Lines more densely sampled near
the center
– Solution: Representing the points
relative to the center point &
Sample more densely
Representation Problems
Y
X
Choosing 4 lines
Iteratively choose 4 lines
Order the best lines by
their counts
Choose the best line that
satisfy constraints
– Constraints include that the
intersections are within the
image & that each line has
exactly 2 intersection with
the other lines
Weighting lines with
different angles differently
to correct for vertical lines
Finding the intersection
Road Map
Introduction
Projector-Camera Homography
Automatic Keystone Correction
Lines Detection
Demo
Conclusion
Conclusion
We built a presentation system that
corrects keystone automatically
We exploited camera-projector
homography
We implemented our own line
detection algorithm
The authors also use this homography
to define virtual buttons on the
projector screen
Thank You!
A502 Newell-Simon Hall
{blum,jiazhiou}@cmu.edu